
Abstract
A major demanding issue is developing a Service Level Agreement (SLA) based negotiation framework in the cloud. To provide personalized service access to consumers, a novel Automated Dynamic SLA Negotiation Framework (ADSLANF) is proposed using a dynamic SLA concept to negotiate on service terms and conditions. The existing frameworks exploit a direct negotiation mechanism where the provider and consumer can directly talk to each other, which may not be applicable in the future due to increasing demand on broker-based models. The proposed ADSLANF will take very less total negotiation time due to complicated negotiation mechanisms using a third-party broker agent. Also, a novel game theory decision system will suggest an optimal solution to the negotiating agent at the time of generating a proposal or counter proposal. This optimal suggestion will make the negotiating party aware of the optimal acceptance range of the proposal and avoid the negotiation break off by quickly reaching an agreement.
Keywords
Introduction
Cloud Computing provides the real-time on-demand service provisioning over the internet. In order to keep mutual trust between Service Provider (SP) and Service Consumer (SC), an SLA signed between the involved parties, which describe the agreed quality of service deliverables and the penalty associated with violation of the agreement by both parties. Current cloud business model supports semi-personalized service access mechanism, which may not be feasible to adapt in the future due to increased demand of users and the dramatic shift of web-based application deployment on the cloud, which may lead to demand for personalized service access in the cloud, by making changes in the terms and conditions of cloud service SLA. It requires the change in current cloud service SLA model, which follows the static or dynamic SLA. Either the consumer can accept or reject the agreement, but there is no provision to modify the terms and conditions set by the provider. So in order to insist on the modifiable terms and conditions in the agreement, a dynamic SLA concept needs to initiate through the effective negotiation between the parties. Buyya et al. have addressed the issue of developing an application level negotiation framework in the scenario of SLA oriented resource allocation models [1]. Therefore, the development of negotiation framework addressed using various decision-making approaches like Adaptive Probabilistic Behavioral Learning [2], Probabilistic Decision Making [3], Bulk Negotiation Behavioral Learning [4], Similarity & Gale Shapely Stable Matching [5] and Adaptive Neuro-fuzzy Behavioral Learning [6]. None of these research works concentrated on the optimization of negotiation solutions in SLA oriented resource management [7]. Here, the optimization of the negotiation process using the decision support system is the major research gap identified during the research study. This scenario has motivated the research work towards the development of a novel negotiation framework using the game theory decision system approach.
The objective of this research work is to develop an efficient SLA negotiation framework for providing personalized service access to the SC which can take less Total Negotiation Time (TNT) during the negotiation process. Here the negotiation is to be made between the parties concerning the SLA parameters and because of this process, the relevant service provider processes consumer requests after establishing an agreement. This negotiation can broadly classify into two types based on the way of communication between the parties namely direct and indirect negotiation. Direct negotiation otherwise called a straightforward negotiation where the SC can talk or negotiate to the SP directly. In paper [8], a generic direct negotiation model with the one-to-one scenario is derived using a game theory approach, which is applicable for web, grid and cloud services. This model takes less TNT to communicate with one SP, where it does not require an indirect negotiation model to spend extra delay in the intermediate part.
In the case of a one-to-many scenario, a direct negotiation model takes more TNT, because the SC needs to negotiate sequentially with multiple numbers of SPs to identify the best provider in the market with less cost and time. Therefore, there is a need for a new negotiation model, which can handle multiple SPs negotiation with less TNT. So an indirect negotiation model was introduced to negotiate with multiple SPs where the Third-Party Broker (TB) used as an intermediate, to negotiate on behalf of SC. The TB contains an ‘n’ number of agents, which are capable of negotiating in parallel with ‘n’ number of SPs. Therefore, introducing an indirect negotiation model with a multi-agent broker will significantly reduce the TNT involved in the negotiation process. The existing negotiation frameworks without decision-making models do not guarantee that the negotiation party would result in the signing SLA. Hence a novel decision-making model is introduced in the third-party broker which exploits the Nash bargaining solution to suggest the optimal solution for SC before the final round of the negotiation process, which makes SC conscious about sending the final proposal with high utility for either party may result in the signing of SLA.
The key contribution of this research study includes as follows: (a) a novel Game Theory based Automated Dynamic SLA Negotiation Framework is introduced for initiating the cooperative negotiation among the participants; and (b) a game theory decision system is proposed to generate proposal or counter-proposal by the negotiation parties. The primary idea of this research work includes the exploitation of co-operative game theory approach to negotiation framework for the scenario of multiple service providers and consumers. This research work extends the negotiation model of Xianrong Zheng, et al., where the 1-to-m, m-to-1 and m-to-m model is addressed as the future work [8]. In order to justify the proposed approach mathematical models derived for both the direct and indirect negotiation framework. Here the corollary and its proof are defined for the negotiation process with a set of players PY = {SC, TB, SP} where SC, TB, and SP denotes the service consumer, broker and service providers respectively. So the optimal solutions suggested by the TB (with proposed decision-making model) will provide high value to both SC and SP.
Related works
Negotiation framework
To negotiate with a physical resource of different cloud infrastructure, a resource negotiator addressed as future work for integrating into a real cloud test bed [9]. Current negotiation models support only time and price-based negotiation without any decision-making model [10]. In order to support negotiation with advanced reservation, Current Price and Timeslot Negotiation (CPTN) is proposed using alternating offer protocol, decision-making model and trade-off algorithm to increase total utility and negotiation speed, and reduces computational load [11]. The decision-making algorithm and new policies are required for complex and advanced resource allocation in a time-critical application to overcome the existing best effort policy [12]. This multilateral negotiation framework in the cloud market consists of multiple one-to-many negotiations, which identify the best fit of user requirement [13]. For successful negotiation to take place between provider and consumer, a negotiation framework and protocol has to define and bargaining solutions are to be optimized [14].
Negotiation protocols
A conversation protocol between the parties can be either bilateral or multilateral. The bilateral protocol used in one-to-one negotiation model, and multilateral protocol used in case of one-to-many, many-to-one and many-to-many negotiation models [15]. None of them addressed the negotiation specific protocol, architecture and comparison of its requirement elaborately [16]. The framework developed using the Contract Net Protocol (CNP) makes effective web service negotiation between the insurance and repair companies. The CNP specifies the communication and control for problem-solving in the distributed nodes using resource allocation and effective selection of tasks respectively [17].
In the cloud, dynamic resource allocation uses automated negotiation, which extends the Alternate Offer Protocol (AOP) for supporting bilateral negotiation [18]. In the multi-agent system, an Alternate Offer Protocol extended for improving the efficiency of protocol concerning the percentage of failure, length of bargaining, computation cost, participation rate and fairness. As a test bed, agent-based simulation is used for protocol design and “Pareto Optimum” is suggested as a favorable solution for selecting payoff [19]. Logic-based alternate offer protocol introduced to handle this conflicting information with a suitable agreement where each agent knows its utility function [20]. In the agent-based electronic market, fuzzy multi-agent negotiation proposed with two types of agents where the agents employ time, resource and behavior dependent tactics [21].
Negotiation solutions
According to negotiation theory, approaches are classified into axiomatic, structural, strategic, procession, behavioral and integrative approaches [22]. The ultimate goal of SLA negotiation is to get a better payoff for both negotiating parties. In the context of game theory, bargaining solutions can be obtained through an axiomatic or strategic approach.
Nash bargaining solution (NBS): Concept of two-person bargaining problem was first introduced by John Nash to establish agreement from the set of possible outcomes obtained from the player’s co-operation [23]. To provide the unique solution to the above problem, Nash proposed the following axioms: Pareto optimality, Symmetry, Invariant concerning Affine Transformations of Utility, and Independence of Irrelevant Alternatives, which describes the behavior of each player [24].
Kalai-Smorodinsky bargaining solution (KSBS): Kalai and Smorodinsky proposed a new solution for bargaining problem that is entirely different from Nash bargaining solution with a limited set of axioms such as Pareto optimality, Symmetry and Invariant. To overcome the difficulty addressed in the paper [25], and to avoid the criticism of the fourth axiom an alternative axiom called Monotonicity is proposed in addition to the above three axioms. The extension of KSBS is proposed where the single-valued solution is identified in the large domain and two axiomatic characterizations such as crucial axiom and three weaker axioms including monotonicity are also presented on the subset of the domain [26].
Egalitarian bargaining solution (EBS): The egalitarian bargaining solution is a third solution introduced by Ehud Kalai for awarding equal gain to both the parties. This solution follows the axiom of Monotonicity and Independence of Irrelevant Alternatives by dropping the condition of scale invariance. An ‘n’ person egalitarian solution is the only bargaining solution presented in the existing research work [27], which is characterized using the symmetric decomposition. The axiomatic approach of bargaining should satisfy the list of properties (Pareto optimality) which requires the available set as comprehensive [28]. Finally, the Table 1 comparison will show the actual difference between the existing and proposed negotiation techniques.
Comparison of techniques exploited in negotiation frameworks
Comparison of techniques exploited in negotiation frameworks
The architecture of the proposed Automated Dynamic SLA Negotiation Framework illustrated as Fig. 1 for providing personalized service access in the cloud environment. This framework supports the indirect cloud service negotiation for the classification of one-to-one, one-to-many, many-to-one and many-to-many models. In order to reduce the delay on the negotiating parties, the negotiation process of ADSLANF automated by using the agents in the intermediate and negotiating end. The Service Consumer Agent (SCA) and Service Provider Agent (SPA) are incorporated in the negotiating end to negotiate on behalf of SC and SP respectively. Next to reduce the TNT of SCA with multiple SPAs; a trusted TB is introduced to negotiate on behalf of SCA, which consists of multiple autonomous agents called Third-party Broker Agent (TBA) to negotiate simultaneously with all the SPAs. This research work implements the one-to-many negotiation model with mathematical derivation for the selection of best Proposal (P) or Counter Proposal (CP), by using bargaining game theory approach in TB (decision-making model).

Game Theory based Automated Dynamic SLA Negotiation Framework.
To follow standard procedure during the negotiation process, an SLA negotiation strategy is proposed using other offer protocols for making communication among the SC, TB and SP. During the negotiation process, TNT value may increase or decrease based on the Expected Communication Time (ECT) among the negotiating parties and occurrence of delay in the negotiating (SC and SP) and intermediate (TB) end. In the negotiating end, Proposal Generation Delay (PGD) and Counter Proposal Generation Delay (CPGD) delay occur due to the respective SC and SP. On the intermediate end, Third-party Broker Forwarding Delay (TBFD) occurs while forwarding the P and CP to SP and SC. To measure the performance of negotiation, TNT of direct and indirect negotiation methods can compute differently. In the direct negotiation, Total Negotiation Time (TNT) between the negotiation parties concerning one negotiation round can be computed as shown in Equation (1).
In the case of indirect negotiation, Total Negotiation Time (TNT) among the negotiation parties (SC, TB and SPs) concerning one negotiation round can be computed as shown in Equation (2).
An SLA in the multiplayer bargaining game G is represented as septuplet (P, ρ, U, X, δ, φ, η).
PY = {SCA, TBAq, SPAq} is a set of players in the bargaining game where (q = 1, 2,.., n).
ρ = {ρ1, ρ2,.., ρ α , ρα +1,.., ρm} be the P (ρP) or CP (ρCP) consist of set of functional parameters ρ1, ρ2,.., ρ α and non-functional parameters {ρα +1,.., ρm} of the service. U = {USCA, USPA} is the payoff or utility value in the perspective of SC and SP. X = {x1,x2,.., xn} is the set of negotiable parameters of ρ where X is the proper subset of ρ and n <m.
δ = {δi, δk} is the responsibility of the negotiation parties where δi specifies the conditions on ρ that SCA promised to satisfy and δk specifies the conditions on X that SPA promised to satisfy.
φ = {ψi, φi} is the set of reservation value for the SCA and SPA respectively. Here ψi be the upper threshold value that SCA wish to pay and φi be the lower threshold value that SPA prepares to accept.
η = {η1, η2,..,ηn} is the set of negotiation constraints present in the ρ.
The above multiplayer bargaining game G is modeled using the follows assumptions: (a) All the SPAs are independent and do not cooperate, (b) Both SPAs and SCA are selfish and aim to maximize their revenue, (c) The behavior of the SPA and SCA are determined by the utility function.
Utility function
The total utility function represents the level of satisfaction for the Negotiation Party (NP) concerning negotiable attributes (X) of the ρP or ρCP. A utility function estimated for a single and multi-attribute by modeling in two-dimensional spaces as linear and monotone. In the proposed research work, multi-attribute utility function of proposal and counter-proposal is estimated in the perspective of NP, that is, either SCA or SPA which may give different preferences over the utility value UNP(xi) and weight W(xi) of each attribute xi. The total utility function of the negotiable parameters (X ∈ ρP or ρCP) of negotiation party
Here the total weight of the attribute should be equal to one i.e. [W(x1)+ W(x2)+...+W(xn)] = 1 and the utility value should be ranges from zero to one i.e. UNP(xi) ∈ (0,1). The utility value ‘0’ denotes dissatisfaction and ‘1’ denotes full satisfaction of NP.
In this research work, time-slot, cost, policy, license, device and region scalability are the negotiation attributes considered as SLA parameters or attributes. The utility value of the attribute xi may be high in the perspective of SPA, low in the perspective of SCA and sometimes vice versa. This is because, higher the price will give high utility value for the SPA, lower utility value for SCA, and average utility value for both the parties. Table 2 shows the utility value of negotiable attributes represented in the perspective of both SPA (
Conceptual analysis of CCSLAF with existing frameworks
The negotiation strategy tells the process, how the SCA, TBA and SPA negotiate among themselves using the standard protocol and algorithms. In the proposed ADSLANF, a bilateral negotiation is used between the SCA and TBA, and a multilateral (multiple bilateral) negotiation is used between the TBA and SPA. An alternate offer protocol is used for making communication among the parties, which constitutes the negotiation operation. Initially, the ρP and the corresponding ρCP is generated by SCA in the first round of the negotiation process. This process must iterate until the negotiating parties agree. In this research work, concession and trade-off algorithms are extended with multi-attribute in the SCA and SPA end respectively. The SCA exploits the concession-making algorithm for generating ρP by conceding their previous proposal by giving enough discounts on the total utility of the possible proposal. In the opponent side, SPA exploits the trade-off making algorithm for generating ρCP by altering the utility of the entire negotiable attribute without making much change in the total utility value of CP.
The SCA exploits Algorithm 1 for handling communication with the TBA and initiates the negotiation process by sending initiate(Negotiation) messages to the broker who in turn responds with the Negotiation ID. Then the Proposal is submitted to the broker and the consumer waits for the reply(Accepted ∥ Rejected ∥ Counter Proposal) message. In case of Accepted reply, SCA will send confirm(Accepted ∥ Rejected) message to the broker and wait for the notification(Accepted ∥ Rejected) message. In case of a Rejected reply, SCA will send confirm(Rejected) message. However, for the reply of Counter Proposal, SCA will checks whether the negotiable parameters pi value ≤ upper thresholds ψi, if yes then it send the confirm(Accepted) message otherwise modifies the Proposal for resubmission and waits for the reply(Accepted ∥ Rejected ∥ Counter Proposal) message.
Algorithm 1 Service Consumer Negotiation Algorithm
In the sense of notification(Rejected) message, the user will not sign the agreement and stop the negotiation process. In case of notification(Accepted) message, the user will send the signed agreement by slaReplay(Document) message and wait for the broker to receive the slaCommit(Document) message.
A Third party broker is an intermediate who uses the Broker Negotiation Algorithm as shown in Algorithm 2 for making communication with service consumers and service providers. As an initial process, the broker will forward the initiate(Negotiation) message to the set of service providers SPAq and receive the Negotiation ID as a response. Next process, forward the submit(Proposal) message and receives the reply(Accepted ∥ Rejected ∥ Counter Proposal) message from SPAq. Then forward reply(Accepted) message to SCA for the single Accepted reply, or in case of more than one Accepted reply forward the reply(Accepted) message of best SPAq who is having less distance. In the case of Counter Proposal reply, the utility function of all the SPAq is computed and then forward the reply(Counter Proposal) message of the service provider who is having maximum utility value. Otherwise forwards the message as the same in case of the Rejected reply. If all the received replies are Rejected one, then TBAq decides to send a modify(Proposal) message to SC. On behalf of SC, it just forward the confirm(Accepted || Rejected) message. After receiving the notification message from SPAq, it forwards the notify(Accepted) message and stops the negotiation for the notify(Rejected) message. As a final process, it forwards the slaReplay (Document) and slaCommit(Document) message from SC and SPAq respectively.
Algorithm 2 Broker Negotiation Algorithm
The service provider exploits the Service Provider Negotiation Algorithm as shown in Algorithm 3 for making communication with the TBAq. As the first process, SPAq receives the request and sends back the Negotiation ID as a response. Then receives the Proposal message and check whether the negotiable parameters pk value ≥ φi, if yes send the reply(Accepted) message otherwise check whether the negotiable parameters pk value < φi, if yes send the Rejected reply else it reply with the Counter Proposal message. Next process, SPAq receives the confirmation from TBAq, then it responds with notify(Accepted) message in case of confirm(Accepted) message and responds with notify(Rejected) message in case of confirm(Rejected) message. Finally, concerning Accepted notification, it waits for the slaReplay(Document) message to send back the slaCommit(Document).
Algorithm 3 Service Provider Negotiation Algorithm
The process of generating proposal and counterproposal using the concession and trade-off making algorithms may lead to an increase in the TNT between the SCA and SPA. This situation arises due to the incompatible generation of P such that it leads to generating multiple CPs without letting to the acceptance of either party. In order to avoid the increase in TNT, the number of iterations involved during the negotiation process is fixed randomly (say 5 or 10). During these negotiation rounds, there is the possibility that the negotiation parties may or may not lead to the acceptance of a proposal or counter-proposal. Therefore, to provide an acceptable and feasible solution a broker uses a decision-making model before reaching the final round of the negotiation process. Moreover, it is tough to select the optimal solution (P with high utility) from the list of CP given by the service providers. A novel decision-making model is represented in the following section using the game theory approach.
Decision-making model
Central part of the negotiation framework is the decision-making model which helps to find the feasible and acceptable solution for the number of counter proposals generated by each SP. Finally, the TB will choose the optimal solution among the feasible solutions obtained from different SP and suggest that solution as the best offer for signing the agreement. The SC can accept the best offer or select any other offer from the remaining feasible solutions of remaining SP. The negotiation and optimal selection process can be modeled as the bargaining game with one SCA, ‘n’ SPA and a TB with ‘n’ number of agents such as TBA. Since there is no direct negotiation between the parties (SCA and SPA), the proposal and counter-proposal are sent through an intermediate TBA. In this scenario, a bargaining game is considered as a pair of ‘n’ two-player non-zero sum game, i.e., ‘n’ number of one-to-one negotiation between the players. Here the many one-to-one negotiations represent the communication between TBA with SPA. Since TBA is negotiating on behalf of SCA, the mathematical model is derived accordingly.
Let ‘u’ be the utility value of the SCA generated by the TBAi (i = 1, 2,.., n), ‘v’ be the utility value of SPAi (i = 1, 2,.., n) and c(S) be the solution point in the set S which is convex, compact and includes the origin. Corollary 1 is developed using the three Utility Theories (1, 2, and 3) [23].
Optimal solution in the utility pair (u,v).
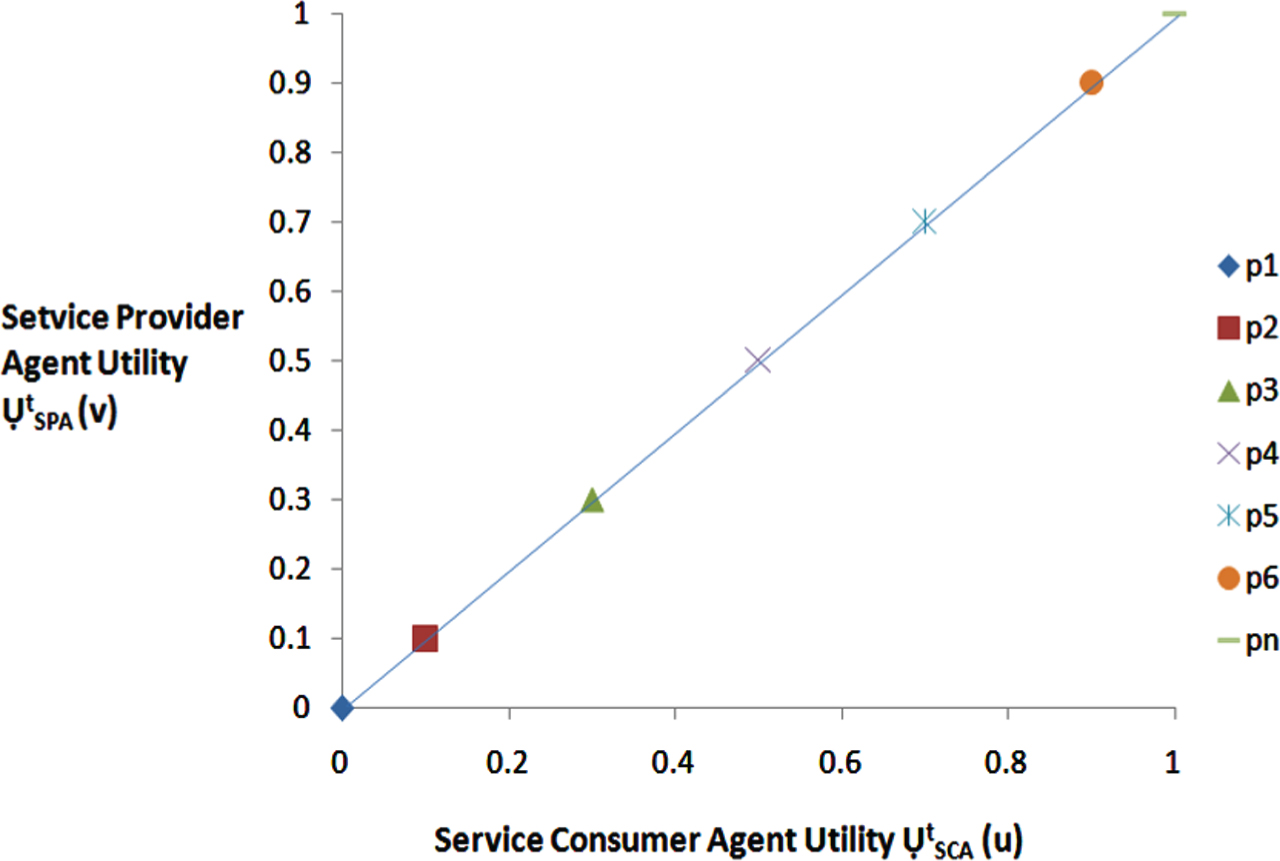
First, plot the point p1 as (u1,v1) which is the utility pair of first two players i.e. the utility value of SC negotiated by TBA1 and the utility value of SP1 negotiated by the SPA1. For example, give the minimum utility value to both the players, which satisfies the Nash equilibrium solution. Since the utility value ranges from 0 to 1, here 0 is assigned to be the minimum utility value for both the players.
Similarly, plot the point p2, p3, p4, p5, p6... pn for the other set of players with their corresponding next higher utility value such as (u2,v2), (u3,v3), (u4,v4), (u5,v5), (u6,v6)... (un,vn) where (un,vn) is the maximum utility value of the players.
Hence from the above Equations (4), (5), (6), (7), (8), (9) and (10) it is clear that the optimal solution to ith pair of ‘n’ two player game with the utility range 0 to 1 is determined as shown in Equation (11).
To demonstrate the performance of proposed ADSLANF, an experimental setup is made by integrating the JADE and CloudSim toolkit. In this setup, JADE toolkit enables the SC, TB and SP to act as agents and CloudSim enables the SPA to provision the negotiated cloud service. Assume the negotiations are fixed to 10 rounds where the SCA and SPA generate the ρP and ρCP using concession and trade-off making algorithms and there is no rejection of ρ before the 10 round. The negotiation round of TBAs (TBA1, TBA2, TBA3, TBA4 and TBA5) with corresponding SPAs (SPA1, SPA2, SPA3, SPA4 and SPA5) are simulated to 10 rounds. For simplicity, only the negotiation rounds taken between TBA1 and SPA1 is shown in Table 3 with attribute weight. Similarly, the negotiation round between other agents was also observed respectively. In order to select the best ρCP from each SP, the decision-making model is used which will suggest the SC with optimal solution (ρCP with maximum utility for SC and SP) for accepting and signing the SLA.
Negotiation Rounds of TBA1 (on behalf of SCA) with SPA1
Negotiation Rounds of TBA1 (on behalf of SCA) with SPA1
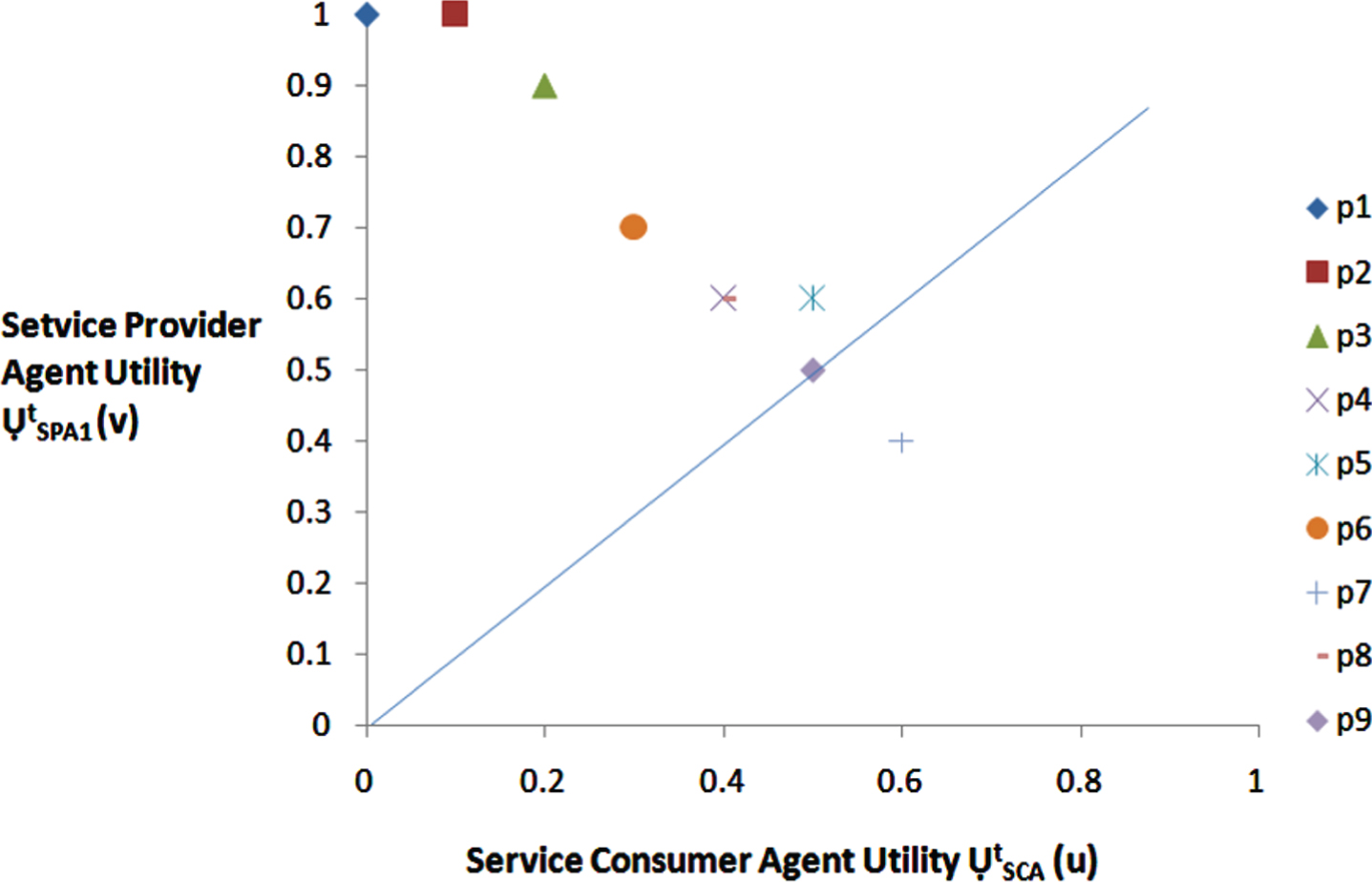
In order to reach the agreement during the negotiation process, the TB exploits the decision-making model before the final round (say ninth round) to suggest the optimal solution of CPs received from multiple SPs. This process will make sense for the SC to reach the agreement in the final round (say 10thround), by accepting any of the optimal solutions obtained from the SPs. First, the optimal solution for the number of CPs presents in Table 3 can be derived using the decision-making model defined in section 4.4. Consider u and v is the total utility value in the perspective of TBAq (on behalf of SCA) and SPAq. Let us plot the point p1, p2, p3, p4, p5, p6, p7, p8 and p9 with their corresponding utility value (u1,v2) = (0,1), (u2,v2) = (0.1,1), (u3,v3) = (0.2,0.9), (u4,v4) = (0.4,0.6), (u5,v5) = (0.5,0.6), (u6,v6) = (0.3,0.7), (u7,v7) = (0.5,0.6), (u8,v8) = (0.4,0.6) and (u9,v9) = (0.5,0.5) respectively by placing u in X-axis and v in Y-axis. By applying corollary 1, the optimal solution is obtained from the graph shown in Fig. 3, where the point p9 with utility pair (0.5,0.5) which gives the maximum and equal utility to both the players (TBA1 and SPA1).
Utility value of TBA1 (on behalf of SCA) with SPA1.
Similarly, the 10 utility pairs (points) of other TBAs and SPAs can be plotted as graphs like Fig. 3. After applying corollary 1, the optimal solution point for the corresponding figures with respect to players (TBA2 and SPA2) is observed as p7 = p8 = (0.5,0.5), (TBA3 and SPA3) is observed as null (no optimal solution), (TBA4 and SPA4) is observed as null (no optimal solution), and (TBA5 and SPA5) is observed as p7 = p9 = (0.5,0.5). Hence, during the 10thround, TBAs will suggest the SCA with all the optimal solutions obtained for the respective SPAs. This suggestion will make sense of the SCA in the 10th round of negotiation, either to accept the counter-proposal for signing SLA or to modify the proposal according to the suggested optimal solution, by changing the negotiation parameters without affecting the total utility of the negotiation party. Hence the proposed decision-making model for the novel ADSLANF will help to result in the signing of SLA by the negotiation parties. Finally, in the 10th round of negotiation between the (TBA3 and SPA3) and (TBA4 and SPA4) result in the optimal solution.
The proposed ADSLANF is compared with existing Price and Time-slot Negotiation mechanism concerning the number of SPAs committed to signing SLA during the negotiation process. From Table 3 simulation result shows that the negotiation without decision-making model may leads 3 SPAs to commit in SLA. However, after applying the decision-making model during the negotiation process leads all the SPAs to commit in SLA. Because of the suggestiongiven by the TBA (using a decision-making model) helps the SPA to generate the proposal within the acceptable range, which probably results in a commitment by all the SPAs. Hence, the suggestion of generating proposal within the acceptable range increases the number of SLA commitment from 2 SPAs to 5 SPAs.
To evaluate the proposed ADSLANF (indirect agent-based negotiation framework), the negotiation process is simulated with and without an agent for the direct and indirect negotiation information given in Tables 4 and Table 5. From the literature survey, negotiation frameworks are classified into four types such as DNWOA [29], DNWA [10, 18], INWOA [30] and INWA (proposed ADSLANF) for comparing the performance.
Direct Negotiation Information with and without Agent
Indirect Negotiation Information with and without Agent
To test the performance of the proposed negotiation model ADSLNF (INWA) with the existing DNWOA, DNWA and INWOA model are compared using the simulated experiment concerning10 negotiation rounds. The TNT values of the corresponding negotiation model are computed using Equations (10) and (11), and the results are compared as shown in Table 6.
Results of Negotiation Models
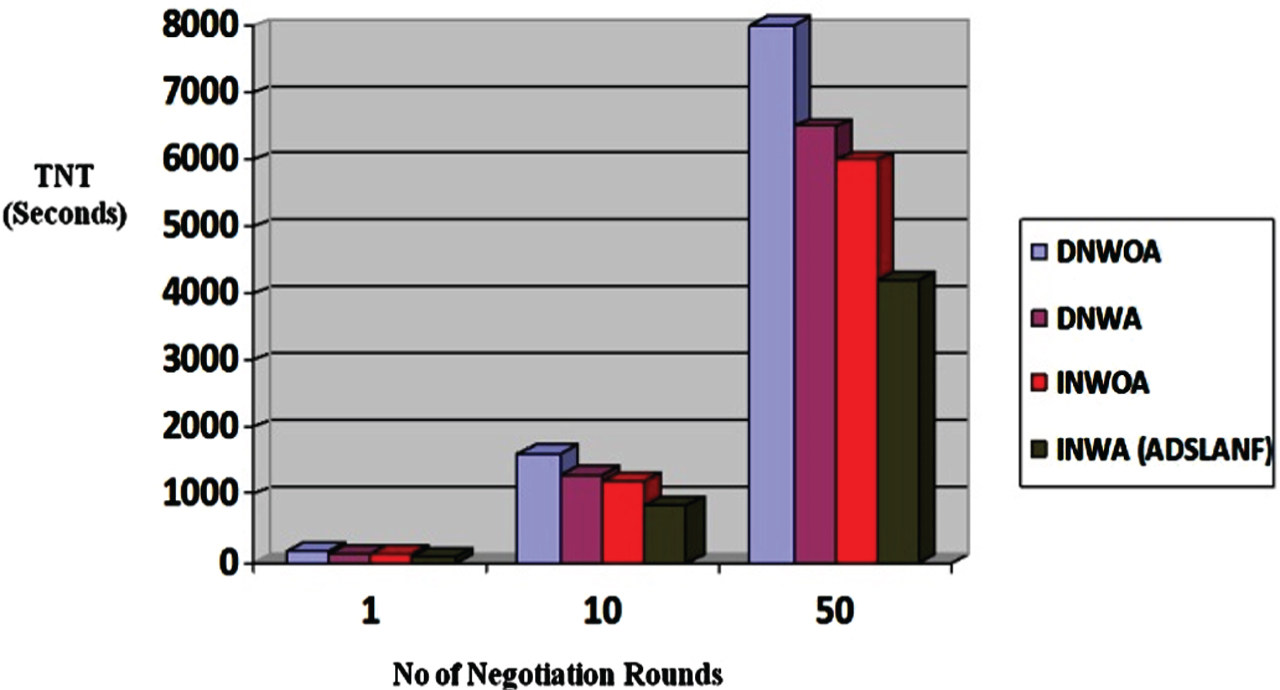
The performance of DNWOA, DNWA, INWOA and proposed ADSLANF is compared by varying the number of negotiation rounds (1, 10, 50 and 100) concerning TNT as shown in Fig. 4. Since the proposed ADSLANF follows the indirect way of negotiation, the resultant graph shows that the proposed model takes very less TNT when compared to other negotiation models.
Performance Evaluation of DNWOA, DNWA, INWOA and ADSLANF.
In this research work, proposed ASLANF was evaluated by comparing with the existing direct and indirect negotiation mechanisms (DNWOA, DNWA and INWOA). Empirical evaluation is carried out for the scenario of multiple one-to-many (1 service consumer and n service provider) model which shows that the proposed ASLANF with three negotiation algorithms takes very less TNT when compared to the existing negotiation mechanism. In order to show the performance of the agent-based model, DNWA and ADSLANF (INWA) were compared concerning TNT. This comparison shows that the proposed ADSLANF gets 46 seconds less TNT than the existing DNWA. Therefore, on an average the proposed ADSLANF improves the performance by reducing 30%, 18% and 14% of TNT compared to existing DNWOA, DNWA and INWOA respectively. In future, the negotiation decision support system will be designed to support the hierarchical computing capability by integration edge computing and cloud infrastructure. Due to the edge computing capability, quick negotiation decisions can be carried out by the negotiation participant without any computational processing delay from the cloud servers.