
Abstract
The disorderly charging behavior of a mobile compound, large-scale electric vehicles in time and space will not only cause the phenomenon of “compound the peak” of the electric load, increase of the peak-valley difference of the grid, and may cause partial overcharge and line congestion and other issues. Relying on the Interval Type-II fuzzy logic algorithm, the two optimization algorithm of interval type 2 fuzzy logic algorithm and genetic algorithm are compared from the space point of view, based on the research on the optimization problem of electric vehicle charging load space allocation, through the results of calculation examples in this paper. Practical results have verified the effectiveness and feasibility of the algorithm, and the interval two fuzzy logic algorithm has high practicability.
Keywords
Introduction
With the continuous development of social economy, energy consumption and environmental protection have become the common focus of governments all over the world, and the environmental pollution accompanying economic development has faced the extent where it must be noticed and resolved [4, 6]. Taking automobiles as an example, the carbon dioxide and other gases produced during the combustion process of traditional fuel vehicles are still one of the causes of the greenhouse effect. Due to consumption of clean energy, the electric vehicles are supported greatly by various countries’ policy, so the number of electric vehicles is gradually increasing. However, the disorderly charging behavior of a mobile compound, large-scale electric vehicles in time and space will not only cause the phenomenon of “compound the peak” of the electric load, increase of the peak-valley difference of the grid, and may cause partial overcharge and line congestion and other issues, greatly affecting the stable operation of the power grid [1–3, 7–9]. Realizing the prediction of load distribution in a certain area is called spatial load forecasting (SLF). Unlike traditional load forecasting that only focuses on time series, SLF considers more spatial load distribution, and its influencing factors are also more complicated [15].
Therefore, it is necessary to master the characteristics of power demand and energy demand of electric vehicle charging, study the distribution and guidance method of electric vehicle charging load in the two dimensions of time and space, and develop an orderly charging control system to realize the optimized scheduling of the mobile load of electric vehicles [11, 14]. Since urban load is affected by factors such as economic development, industrial structure, consumption level, and living habits, the load density and regional function method are difficult to consider the influence of many factors, and the model is relatively rough [10–13]. Although the multivariate method can consider a variety of influencing factors, it cannot consider the complex non-linear relationship between the factors. Therefore, the accuracy problem of traditional space load forecasting has been difficult to solve.
Relying on the Interval Type-II fuzzy logic algorithm, the two optimization algorithms of Interval Type-II fuzzy logic algorithm and genetic algorithm are compared from the space point of view, to analyze optimization performance of two algorithms based on the research on the optimization problem of electric vehicle charging load space allocation in this paper.
Interval type-II fuzzy logic algorithm
Assumptions of the problem
(1) Charging station. A certain number of electric vehicle charging stations and decentralized charging piles are connected to the power grid in a certain area, and the decentralized charging piles that are close in position are regarded as a virtual charging station, a total of M seats with other charging stations. The target charging power of the jth charging station is Pj.
(2) Vehicles to be charged. There are N electric vehicles to be charged in the area, and the charging power Pi of the i-th electric vehicle depends on the charging method, which is variable or constant.
(3) Charging decision variables. Xij is a decision variable. X = [xij]N×M is the decision variable matrix for electric vehicle charging. The number of electric vehicles charged at the j-th charging station is shown in Equation (1), and the charging power P’j is shown in Equation (2).
(4) Charging distance and time. The total charging time from the i-th electric vehicle to the j-th charging station is shown in Equation (3).
In the formula, twj is the queuing time in the station; tcij is the charging time; tdij is the travel time to the charging station. twj is related to factors such as the number of vehicles in the jth charging station, the scale of the charging station, and the type of charging station. We assume that it is only proportional, as shown in Equation (4), kj is a proportional coefficient in this paper. tdij is related to the distance from the vehicle to the charging station and the average speed vi of the ith electric vehicle, as shown in Equation (5).
In order to simplify the calculation, it is assumed that the target charging power of each charging station in the area is the same and is the average distribution value of the electric vehicle charging load among the stations, i.e.
In order to reduce the impact of electric vehicle charging on the economic operation of the power grid, the goal 1 of the optimization of electric vehicle charging load space allocation is to minimize the gap between the charging power of each charging station and its target power, as shown in Equation (6). Since it is assumed that the target charging power of the charging station and the charging power of each vehicle are the same, the problem is transformed into the average distribution of the number of charging vehicles among the charging stations, as shown in Equation (7).
In the formula, λ1 and λ2 are the objective functions; and the weight coefficients corresponding to
(1) Distribution constraints. Since the standard particle swarm algorithm is optimized for the continuous solution space, and the solution space of the charging load space allocation problem is a discrete binary space, the continuous space needs to be converted into a discrete space to meet its constraints and calculate the objective function. For the particle position coordinates generated by random iteration shown in Equation (26), the dimension corresponding to the maximum value of each vehicle position coordinate is taken as the dimension as the decision variable 1, and o is taken for the other dimensions. In this way, the allocation constraint can be satisfied, and the converted discrete solution space can be used to calculate the objective function of each particle and compare and record it.
(2) Constraint of charging distance. The charging distance constraint is an inequality constraint, and the idea like the penalty function method can be used. For the element greater than limax in the distance matrix L, it shall be changed to a sufficiently large positive number. When the corresponding vehicle and station are paired, the fitness value will increase significantly, which will punish the constraint condition being destroyed.
Algorithm flow
The flow chart of the particle swarm algorithm for solving the optimization problem of electric vehicle charging load space allocation is shown in Fig. 1.
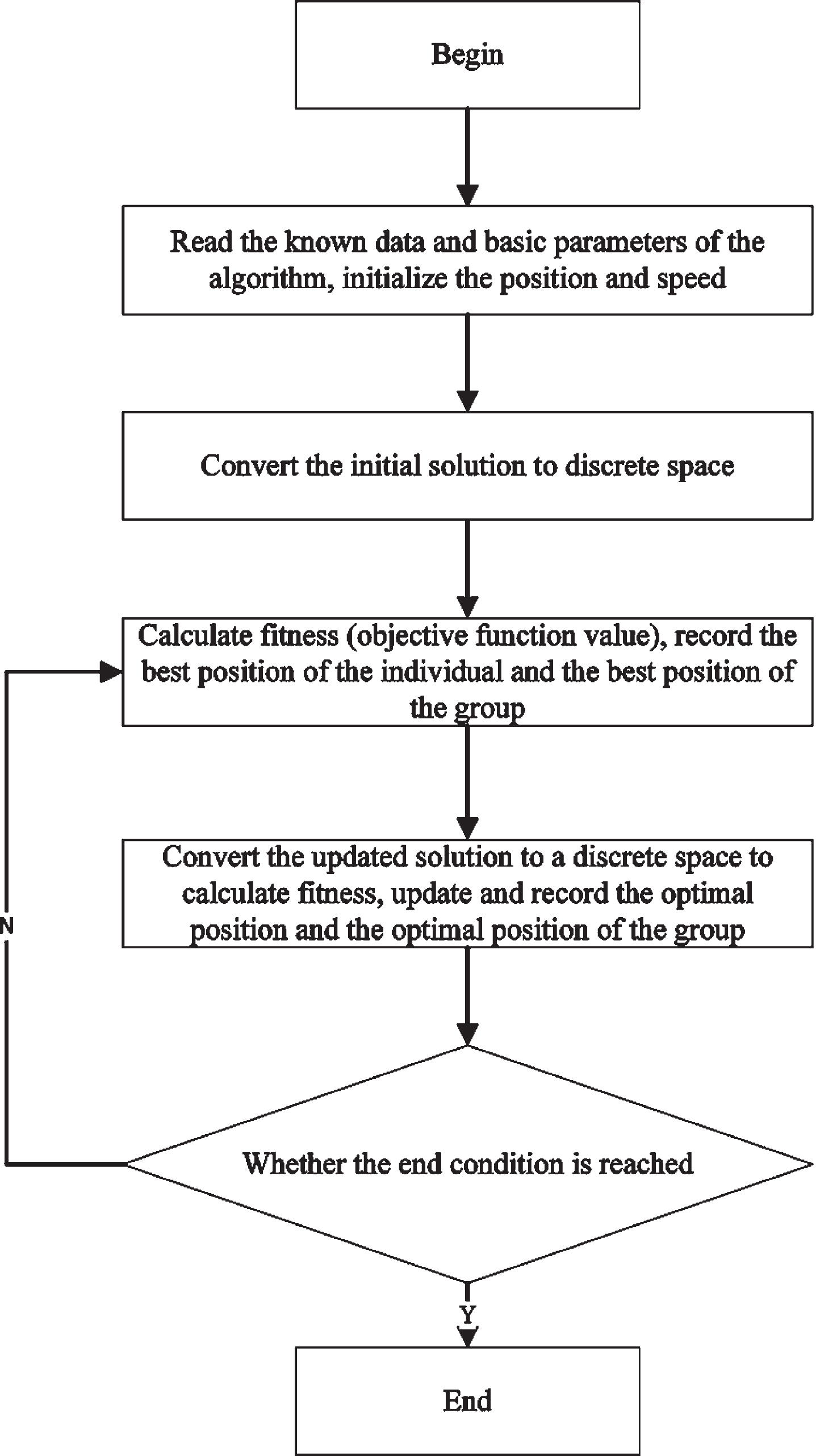
particle swarm algorithm for solving the optimization problem of electric vehicle charging load space allocation.
Constraint processing (coding)
Distribution constraints. Although binary encoding is one of the most widely used encoding methods for genetic algorithms, because of the need to meet the allocation constraints, an integer encoding form between 1 and M is adopted in this paper to complete the genetic operation, and converts the integer encoding to 0-1 coding of decision variables only when calculating the fitness function. Therefore, the dimension of this algorithm is N, which is much smaller than that of particle swarm algorithm.
(2) Constraint of charging distance. The processing method of the charging distance constraint is the same as the particle swarm algorithm.
In the formula, pm represents the individual variation probability; pm1 represents the maximum variation probability; pm2 represents the minimum variation probability.
The flow chart of genetic algorithm to solve the optimization problem of electric vehicle charging load space allocation is shown in Fig. 2.
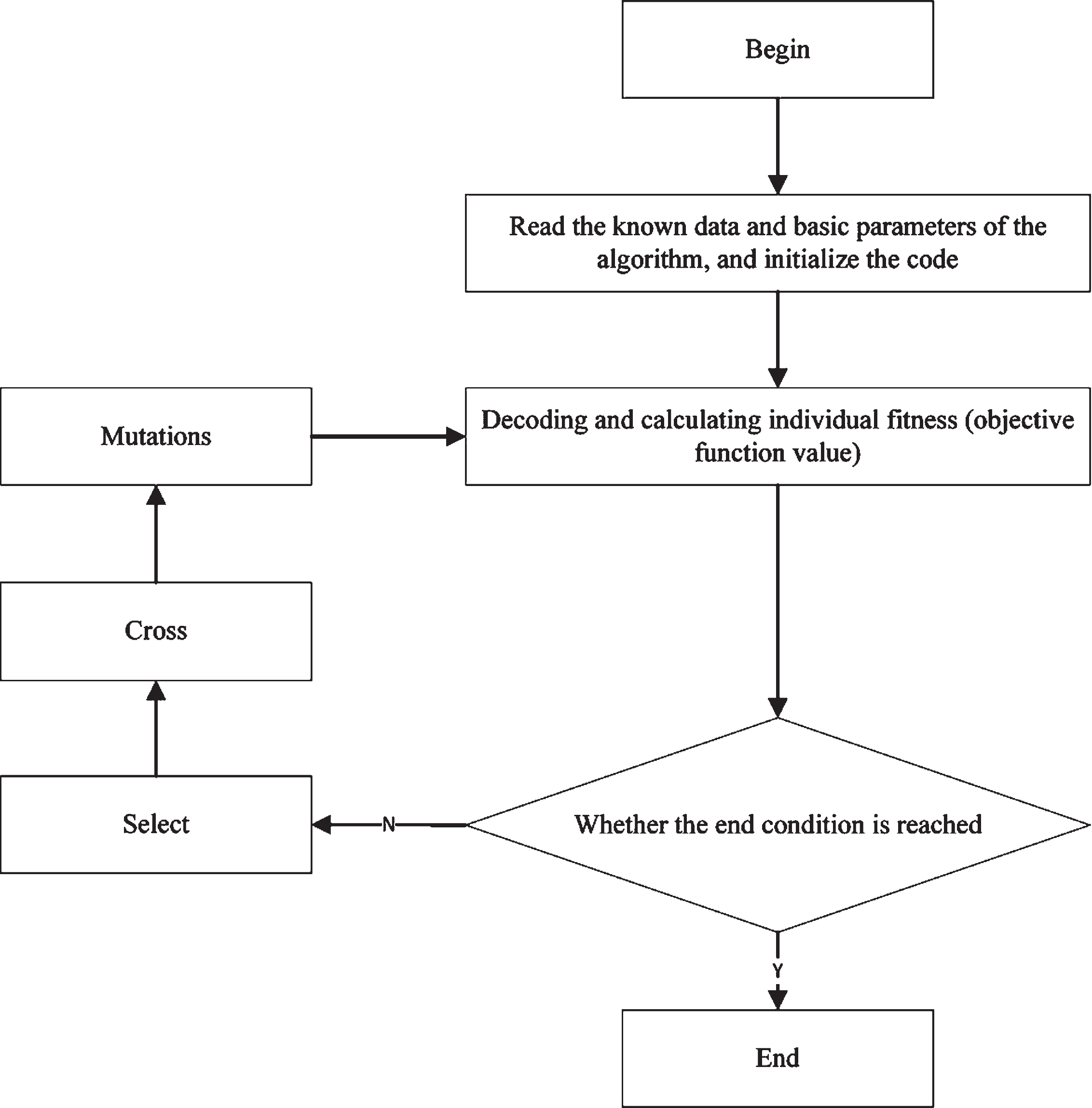
Algorithm flow chart.
In recent years, with people’s recognition of green travel and national policies supporting the new energy vehicle industry, electric vehicles have developed rapidly. Similarly, distributed energy represented by distributed photovoltaics has also gained rapid growth due to the support of governments at all levels. Distributed energy power generation and electric vehicle charging load are superimposed on the conventional load, which will have an impact on the load characteristics of the urban power grid.
Since electricity load is closely related to human economic activities, generally speaking, the more population in a certain place, the higher the per capita disposable income, the lower the electricity price, and the higher the load level in the area. In addition, the regional electricity sales are a direct manifestation of the load, Regional GDP can also indirectly reflect the size of the electricity load in the region. Therefore, for the conventional load SLF, N = 5 is selected in the formula, and x1 is the total population of the area, x2 is the per capita disposable income of the area, x3 is the total GDP of the area, x4 is the area’s annual electricity sales, and x5 is the average electricity price of the area, you can get the conventional load SLF model.
Model of the impact of electric vehicles and new energy
Factors that affect the load of electric vehicles include the type of electric vehicle, the cruising range, the characteristics of charging piles, the travel needs of users and the habits of using vehicles. The electric vehicle load characteristics are derived through the electric vehicle model, total volume and model parameters calibrated by the manufacturer through the registration and filing of the vehicle management office. Similar to the consideration of traditional conventional load, and the electric vehicle load can be obtained based on SLF model.
SLF model integrating all types of loads
The two sides is superimposed to obtain the SLF model after expanding the influence factors in this paper.
In the formula: y(l, m, n) is the total load considering various factors; x is the influence factor of expansion. Regardless of whether it is conventional load, electric vehicle load, or new energy power generation output, the above 14 influencing factors are considered. When there is no corresponding data in the historical data, 0 is taken.
Example data
Assuming that there are a total of M = 5 charging stations connected in the area, N = 50 electric vehicles, and the charging distance lij is randomly generated between several kilometers and more than ten kilometers. The service radius of the electric vehicle charging station is several kilometers, and the maximum allocatable charging distance is taken as limax = 10 km. If the limit is exceeded, a sufficiently large positive number is taken as 1000 instead, as shown in Table 1. The proportional coefficient kj = 2,1,3,2,1 (j = 1,2,..., M) between the queue time and the number of charged vehicles, the objective function weight coefficient λ1 = 0.6,λ2 = 0.4. In the particle swarm algorithm, the number of particles is 100, the maximum number of iterations is 500, and the inertia weight decreases linearly between 0.4 and 0.9. In the genetic algorithm, the number of groups is 100, the maximum number of iterations is 500, pm1 = 0.1, pm2 = 0.01.
Distance between electric vehicles and charging stations (unit: km)
Distance between electric vehicles and charging stations (unit: km)
After iterative calculation, the distribution results of all vehicles in the area among the charging stations are obtained. The objective functions obtained by the PSO algorithm are F1 = 0, F2 = 1091, and F = 1.7456, and the objective functions obtained by the GA algorithm are F1 = 0, F2 = 1025, F = 1.64. At the same time, all vehicles are allocated to only one charging station, and vehicles and charging stations that exceed the distance constraint are not allocated and meet the constraint conditions. The results show that while all charging vehicles are evenly distributed to charging stations, the total charging time and charging distance in the system are minimized, and the effectiveness and feasibility of the two algorithms are verified.
Discussion
The space allocation optimization problem of electric vehicle charging load is a high-dimensional optimization problem. The calculation speed of the optimization algorithm in high dimensionality determines the real-time performance of the control system. The results show that the convergence speed and fitness calculation results of the Interval Type-II fuzzy logic algorithm are better than the particle swarm algorithm in various situations, and is more obvious in high dimensions, so the genetic algorithm has higher practicability.
Conclusion
Relying on the Interval Type-II fuzzy logic algorithm, the two optimization algorithms of Interval Type-II fuzzy logic algorithm and genetic algorithm are compared from the space point of view, to analyse optimization performance of two algorithms based on the research on the optimization problem of electric vehicle charging load space allocation in this paper. The results show that the Interval Type-II fuzzy logic algorithm is better than the particle swarm algorithm in the space allocation optimization of electric vehicle charging load.