In this paper, a novel observer based direct adaptive interval type-2 (IT2) fuzzy sliding mode control (SMC) method is proposed for a certain class of high order unknown nonlinear dynamical systems with unmeasured states. Firstly, a high-gain observer is designed to estimate the tracking errors of the system states. Then on the basis of the observer, an IT2 fuzzy logic system (FLS) is established to approximate the equivalent control law, in which the estimate of the sliding surface function is applied as the input. The sliding mode control law is developed to guarantee the robustness of the system, in which an adaptive switching control gain is designed to handle the chattering problem. The free parameters of the controller are adjusted online by the adaptive laws. Finally, the stability of the overall closed-loop system is proved in the Lyapunov sense based on Meyer-Kalman-Yakubovich (MKY) lemma. In the proposed control system, the constraints on the knowledge of mathematical model, disturbances, and state vector can be avoid completely, and the trajectory tracking control can be achieved only using the information of system output. Simulation results demonstrate the effectiveness and the high control performance of the proposed controller.
Over the past two decades, it has been shown that fuzzy logic system (FLS) is a universal function approximator with a high degree of flexibility and widely used to model the nonlinearities [1–3]. The fuzzy logic systems (FLSs) are able to approximate any nonlinear functions with arbitrary accuracy by using the appropriate IF-THEN rules [4]. Unfortunately, the knowledge applied to construct rules in a FLS is often uncertain, which leads to rules having uncertain antecedents and/or consequents, and this uncertainty is finally revealed in membership functions (MFs) of antecedents and/or consequents [5]. However, the ordinary FLS (henceforth called type-1 FLS) is not able to express this uncertainty as its antecedents and consequents MFs are affirmatory, and it can sometimes deliver an unsatisfactory performance. Therefore, the type-2 FLS which contains at least one type-2 fuzzy set has been widely studied over the past few years. The type-2 fuzzy sets allow us to handle linguistic uncertainties because their MFs are 3-D and include a foot print of uncertainty [5, 6]. These features make it possible for type-2 FLS to directly model and handle uncertainties. Consequently, the type-2 FLSs have the potential to perform better than the type-1 FLSs [7]. Since the computational process in a general type-2 FLS is quite complex, the interval type-2 (IT2) FLS is often used instead. In [8], the authors have demonstrated that all of the results that are needed to implement an IT2 FLS can be obtained using type-1 FLS mathematics, which makes the IT2 FLSs more practical.
The uncertainties or nonlinearities are inevitable in the majority of control systems. There were many studies conducted in the conditions of unknown nonlinear system [9, 10]. It is of great significance for practical applications to design a controller with strong robustness, good dynamic, and high precision in the conditions of complicated system characteristics. In addition, the full states of the system cannot always be conveniently or economically measured in some practical engineering [11], which is unavailable for carrying out the state feedback control directly. In such case, observer-based control schemes should be applied. It is worth mentioning here that, in order to cope with the problem of unmeasured states, under the situation of unknown nonlinear system dynamics, many researchers were concentrated on model-free state observers such as high-gain linear state observer [12], fuzzy state observer [13] and fuzzy sliding mode state observer [14].
The FLSs can be applied to the practical control systems efficiently due to its universal approximation capability. By introducing the appropriate adaptive laws, FLSs can learn the uncertain nonlinear dynamics online, and this knowledge can be utilized to adjust the controllers in real time. For example, in [7], the IT2 FLS was applied to build the state space model to solve the problem of system uncertainties and nonlinearities, and in [11], a new observer based fuzzy adaptive fault-tolerant nonlinear control method was proposed for uncertain strict-feedback nonlinear systems with unknown control direction. Sliding mode control (SMC) is one of the most effective method for the uncertain nonlinear systems [15, 16], since it has high robustness to disturbances and unmodeled dynamics, as well as the excellent control effect for nonlinear systems. However, it has an obvious disadvantage of chattering phenomenon. In order to enhance the control performance, adaptive SMC (ASMC) has been widely studied in recent years [17, 18], which has excellent adaptability to the uncertain or unknown systems. By incorporating the FLS into SMC method, the adaptive fuzzy SMC (AFSMC) method has been wildly researched. The indirect AFSMC methods were presented in [10] and [19], in which the FLSs were applied to estimate the nonlinear functions. In [20] and [21], the authors addressed the direct AFSMC, in which the FLSs were utilized to approximate the control input directly. In order to handle the problem of unmeasurable states, an observer based adaptive fuzzy backstepping dynamic surface control method was proposed for MIMO stochastic nonlinear systems in [22]. In [23], the authors presented an observer based adaptive fuzzy tracking control method for nonlinear systems with time delay and input saturation. And in [24], a robust observer based indirect adaptive type-2 fuzzy control method was proposed for a class of nonlinear systems.
As mentioned above, there are some challenges in the design of adaptive fuzzy controller, such as the external disturbances, as well as the effects of fuzzy approximation errors and state estimation errors on the stability of closed-loop system. The adaptive fuzzy control technique is worth investigating in order to further improve the robustness and control accuracy of the system. The type-2 FLSs have the potential to perform better than the type-1 FLSs as the type-2 FLSs are able to settle the uncertainties directly. In addition, compared with the indirect adaptive control method, the direct adaptive control scheme has a lower computational cost since it omits the model estimation. However, to the best of our knowledge, there is no published work focused on the direct adaptive IT2 fuzzy sliding mode control design for unknown nonlinear systems with unmeasurable states, which motivates this study.
This paper proposes a method for designing an observer based direct adaptive IT2 fuzzy sliding mode controller aiming at a class of single-input single-output (SISO) unknown nonlinear systems with unmeasured states. Simulation results show the validity of the presented control scheme. The main contributions in this paper are summarized as follows:
All the states of the system are assumed to be unmeasurable, and a high-gain observer is designed to estimate the tracking errors of the system states.
Based on the observer, a new direct adaptive IT2 fuzzy SMC law is proposed. The IT2 FLS is established to only approximate the control input and the estimated value of the sliding surface function is the only input of the FLS, which can simplify the structure and decrease the online computation abundantly.
A new adaptive switching control gain is designed to reduce chattering in the sliding mode control law.
The convergence of the overall closed-loop system is proved by using the Lyapunov theorem and the Meyer-Kalman-Yakubovich (MKY) lemma.
This paper is organized as follows. Section 2 gives a brief introduction on the IT2 FLS. The problem formulation is presented in Section 3. In Section 4, the observer based adaptive IT2 fuzzy sliding mode controller is proposed, and the stability of the overall closed-loop system is proved. Then in Section 5, the proposed controller is simulated on an inverted pendulum system. Finally, the conclusions are drew in Section 6.
Interval type-2 fuzzy logic systems
A fuzzy logic system (FLS) described using at least one type-2 fuzzy set is called a type-2 FLS [25]. Compared with type-1 FLS, a type-2 FLS is able to handle the situation of the rule uncertainties because of its uncertain membership functions (MFs). Figure 1 shows an Interval type-2 MF with uncertain mean [26], which illustrates the membership grade of xf in the type-2 fuzzy set . The boundaries of the membership grade are determined by the upper MF and the lower MF. As shown in Fig. 2, there are five principal parts in a type-2 FLS: fuzzifier, rule base, inference engine, type-reducer, and defuzzifier [5]. The type-reducer performs a type-reduction operation, which is unnecessary for type-1 FLS. The type-reducer yields a type-1 set, i.e. the type-reduced set, from the type-2 rule output sets. And then a crisp output can be obtained by the defuzzifier. The combination of type-reducer and defuzzifier is called output processing. Considering a multiple input single output interval type-2 FLS, which is a mapping f : Rp → R1, the general inference procedure will be introduced in detail.
The interval type-2 MF with uncertain mean.
The structure of the type-2 FLS.
Fuzzifier: The fuzzifier maps a crisp input vector onto input fuzzy sets. Although the fuzzy sets of the inputs are type-2 sets, the singleton fuzzification will be used due to its fast computation speed.
Rules: The interval type-2 fuzzy rule base contains a collection of IF-THEN rules. Assume that there are M rules and the lth rule in the interval type-2 FLS can be written as follows:
where is antecedent interval type-2 set, yf ∈ Y is the crisp output, and is consequent interval type-2 set.
Inference: In the interval type-2 FLS, the inference engine combines rules and gives a mapping from input interval type-2 sets to output interval type-2 sets. With product inference engine, the firing interval of the lth rule, i.e., , is an interval type-1 set, which is determined by the input vector xf, upper MFs, and lower MFs, and can be expressed as
where and are the left-most and right-most points of Fl, respectively, and are the lower and upper membership grade of in the interval type-2 set , respectively. Therefore, the fired output consequent set of the rule Rl, which is an interval type-2 set, can be obtained from the firing interval Fl [6].
Type Reducer: In the interval type-2 FLS, the type-reducer generates an output of interval type-1 fuzzy set. There are several type-reduction methods, such as centroid, modified weight, and center-of-sets (COS) [26]. In this paper, COS type reducer is chosen, and the output interval set Ycos can be expressed as follows:
where yl and yr are the left-most and right-most points of Ycos, respectively, , , and Yi is the centroid of the interval type-2 consequent set . Since Ycos is an interval type-1 set, the two end-points of this interval need to be computed to obtain Ycos.
For any value yf ∈ Ycos, yf can be written as follows:
From (4), it can be seen that yf is a monotonic increasing function with respect to , so yr and yl are only associated with and , respectively. In the COS type-reduction method, yr and yl depend only on mixture of and values [5]. In this case, yl and yr can be written as follows:
where and denote the firing strength membership grade of the ith rule contributing to yl and yr, respectively. There is a simple iterative algorithm to compute yl and yr [21, 27]. Here, a simplified method [28, 29] is used to obtain the simplified values of yl and yr, i.e., and .
where , , meanwhile, and are defined as the fuzzy basis functions.
Defuzzifier: In order to obtain a crisp output, the type-reduced set Ycos should be defuzzified. The average of and is utilized to defuzzify it, so the crisp output of an interval type-2 FLS is
where , and . Then, any unknown smooth function can be approximated by the interval type-2 FLS described by (7).
Problem formulation
Consider a nth-order unknown nonlinear SISO system in state space model as
where x = [x1, x2, ⋯ , xn] T is the state vector of the system, u (t) is the bounded control input, y is the system output, f (x) and g (x) are unknown nonlinear but continuous functions of the system, d (t) is the external disturbance, and
Assume that f (x), g (x), and d (t) satisfy fmin ≤ f (x) ≤ fmax, 0 < gmin ≤ g (x) ≤ gmax, and |d (t) | ≤ D, respectively, where fmin, fmax, gmin, gmax, and D are unknown constants. In addition, assume that not all states xi (i = 1, 2, ⋯ , n) are available for measurement, but y is measurable.
The control objective is to make the states of the system x track the desired bounded states in the condition of uncertain nonlinear functions, unknown disturbances, and unmeasurable states. The tracking error is defined as follows:
Then the estimate of e is defined as
where is the estimate of x. In order to use the SMC method, the sliding surface s is defined as
where K = [k1, ⋯ , kn] T, en-1] T, and ki (i = 1, ⋯ , n) are chosen such that the polynomial pn + knpn-1 + kn-1pn-2 + ⋯ + k2p + k1 (p is Laplace operator) is strictly Hurwitz [30]. By using this sliding surface function, s → 0 ⇒ ei → 0 (i = 1, 2, ⋯ , n) can be obtained. The first derivative of s can be written as follows:
Assume that f (x), g (x), and d (t) are known, all states xi (i = 1, 2, ⋯ , n) are measurable, and the system is in the ideal condition that s = 0. Then the ideal control law u* (t) can be calculated by using , as follows:
In the following, an observer will be applied to obtain , then the observer based direct adaptive interval type-2 fuzzy sliding mode control law will be presented to approximate u* (t), and the stability of the whole closed-loop system will be proved.
Design of the controller
Design of the observer
Applying u = (u - u*) + u* to (8), yields
Then the high-gain observer can be designed as follows [31]:
where H = [h1, ⋯ , hn] T is the observer gain vector, and hi (i = 1, ⋯ , n) can be chosen such that (here, qi > 0 and 0 < ɛ0 ⪡ 1). By using the observer, (16) can be obtained based on (13)
Define the observation error as , the derivative of can be expressed as
where is a strictly Hurwitz matrix.
Design of the control law
The proposed observer based direct adaptive interval type-2 fuzzy sliding mode control law is designed as , where is the equivalent control law which is the crisp output of the interval type-2 FLS and utilized to approximate . is the switching control law which is applied to guarantee the robustness of the system. By using the observer, (18) and (19) can be obtained based on (11) and (12).
where is the estimate of the sliding surface s, and .
In order to obtain the fuzzy output , we will construct a SISO interval type-2 FLS, in which is used as the input. By using (7), the crisp output of the interval type-2 FLS can be written as follows:
where is a function of when the lower and upper MFs are determined, and α changes according to an adaptive law. Based on the fuzzy approximation theory, there is an optimal fuzzy system , in which α* can be defined as
where is the estimate of α*, and Ωα is a compact set of . Considering the fuzzy approximation error ɛ, yields
where ɛ is unknown but bounded [32].
where .
As for the switching control law , the ideal value is defined as , where E* (t) >0, and sgn (*) = {1, * >0 ; 0, * = 0 ; - 1, * <0}. The switching gain E* is difficult to determine in practical engineering. Overlarge E* can cause severe chattering problem. Whereas the stability of the system cannot be guaranteed if E* is too small. The estimate of E* is defined as , and the estimate error is .
Therefore, the control law is
The adaptive laws of the free parameters and are given as follows:
where η1 and η2 are user-defined positive constants. The convergence of the closed-loop system will be verified in the following.
Convergence of the closed-loop system
The whole closed-loop system contains the observer and the controller, and the objectives of them are to achieve and , respectively. Here, the stability of the controller is analyzed firstly. The Lyapunov function of the controller is defined as
Combined with (16), (19), and (23), can be rewritten as follows:
Assume that g (x) is derivable. Then the derivative of VS can be obtained as follows:
Applying (25) and (26) into (29), yields
where E* can be defined as . Hence, can be obtained. By using LaSalle invariance principle [33], and can be obtained. Then (31) can be derived.
In order to study the convergence of the whole closed-loop system, the Meyer-Kalman-Yakubovitch (MKY) lemma [34] will be applied to analyze the observer system. In (17), is regarded as the system input, and the state space model of can be written as
Then can be expressed as transfer function model as follows.
where is a known stable transfer function. Then we introduce a transfer function (ϖ > 0, l = n–1) such that L (p) T (p) is a strictly positive real (SPR) transfer function. By using T (p), (33) can be rewritten as follows:
The state space realization of (34) can be expressed as [35]:
where .
For the given , Bc, and C, based on MKY lemma, there must exist a scalar ϑ > 0, a vector , and a symmetric positive define matrix P such that
where L is a given symmetric positive define matrix. Define , hence Q is a symmetric positive definite matrix.
Define the Lyapunov function of the whole closed-loop system as . Then the derivative of V can be obtained as follows.
where . Integrating both sides of (37), yields
where T ∈ [0, ∞). Since V (T) ≥0, (38) can be rewritten as
According to the definition of T (p), one can get T-1 (p) is stable. g (x) ∈ L∞ and u ∈ L∞ can be obtained through the model introduction. Besides, by using (31), it can be obtained that converges asymptotically to zero. Therefore, all the functions of the right-hand side of (16) are bounded, then can be obtained. In addition, since and , one can get and , respectively, then can be obtained. As a result, . On the other hand, using (33), one can get as L (p) is stable. Therefore, . Based on the study in [36], (39) can be considered as the criterion of the H∞ tracking performance. Hence, can be proved. Combined with (31), can be obtained, i.e., the whole closed-loop system is asymptotically stable.
Remark 1. The product of the frequency domain function ℏ (p) and the time domain function can be expressed as , where and represent the Laplace transformation and its inverse transformation.
Remark 2.L∞ denotes the space about essentially bounded function over [0, ∞), and L2 denotes the space about Lebesgue measurable and square integrable function over [0, ∞).
Remark 3. Because of the external interference of the system, will be infinitely larger with the adaptive law (26), and then the system chattering may be caused. To solve this problem, (26) can be rewritten as
where Ξ is a user-defined positive constant. A larger Ξ has more potential to reduce chattering but increase the tracking control error. It can be easily proved that when , i.e., , which is similar to the boundary layer. Therefore, one can approximately obtain . In addition, can be still verified. Thus, can be derived.
Remark 4. In practical application, in order to reduce the chattering phenomenon further, the discontinuous switching function sgn (*) in (24) can be substituted by some continuous ones such as sat (*) [37].
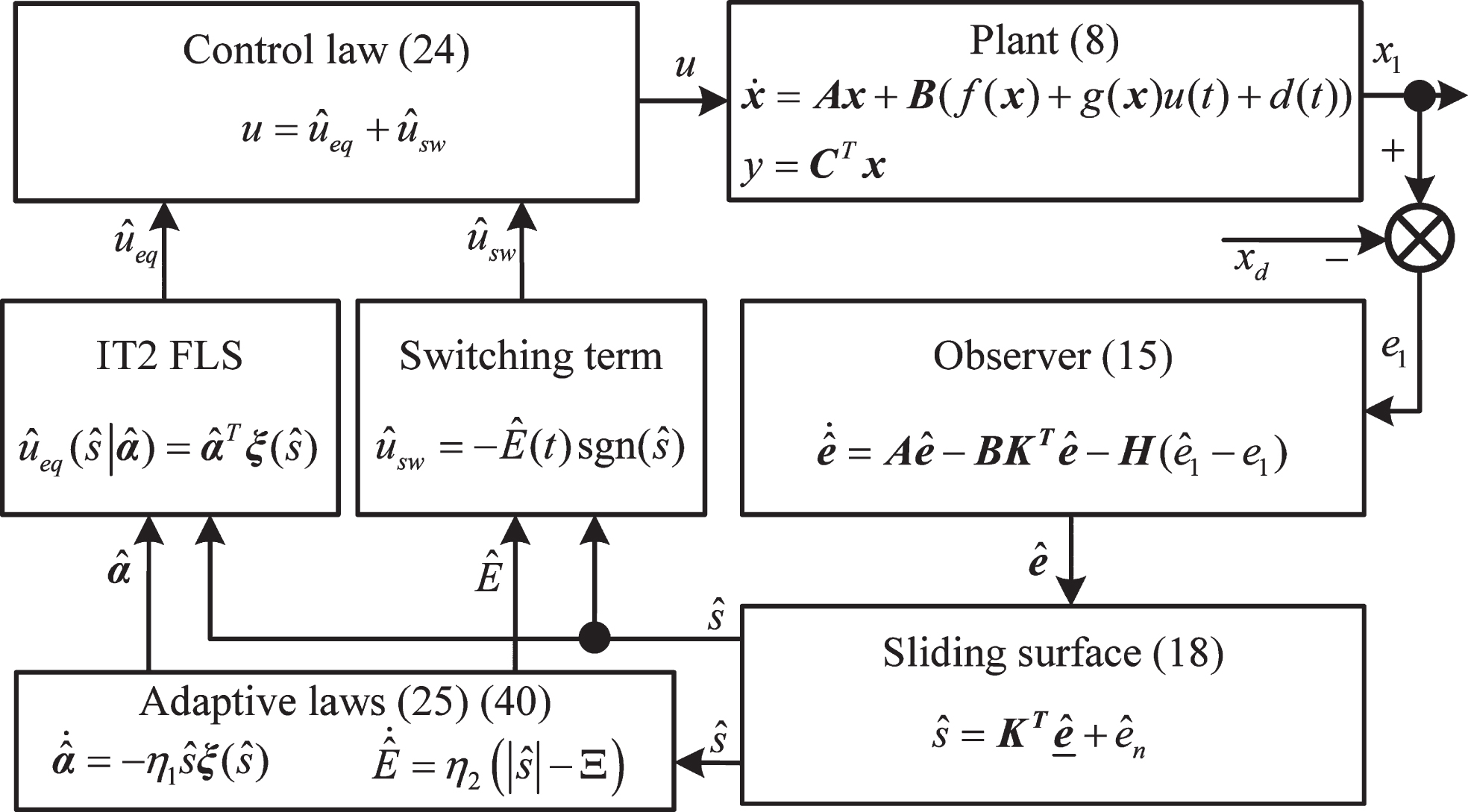
Figure 3 illustrates the block diagram of the proposed observer based direct adaptive IT2 fuzzy SMC system. Theorem 1 summarizes the main results.
The block diagram of the observer based adaptive IT2 fuzzy SMC system.
Theorem 1.Consider a class of SISO high order systems described by (8) with unknown nonlinear dynamics and unmeasurable states, the observer (15), the sliding surface (18), the control law (24), as well as the adaptive laws (25) and (40) can guarantee the stability of the whole closed-loop system. The proof is provided in section 4.3.
Simulation examples
In this section, some simulation research will be conducted to demonstrate the effectiveness and the control performance of the proposed observer based direct adaptive IT2 fuzzy sliding mode controller. We use the inverted pendulum system to verify the presented control method. Figure 4 shows the inverted pendulum system, which can be expressed in state space model as [38]:
The inverted pendulum system.
where
and are the angular position and velocity, respectively, gv = 9.8m/s2 is the gravitational acceleration, mc and m are the mass of the cart and the pendulum, respectively, l is the half-length of the pendulum, and u (t) is the external force input. In this system, assume that mc = 1kg, m = 0.1kg, and l = 0.5m. In addition, assume that x1 ∈ (- π/2, π/2) (hence g (x) >0) and u (t) ∈ [-30, 30]. The disturbance is assumed as d (t) =10 sin(5t) +5 sin(15t). The reference trajectory is defined as xd = 0.4 sin(2t), and the observer based direct adaptive IT2 fuzzy SMC law is designed as follows.
In the sliding surface (11), K is chosen as K = [1, 10] T. The observer gain vector in (15) is chosen as H = [5 × 103, 106] T, then is a strictly Hurwitz matrix. The initial value of the observer is given as . In order to construct an IT2 FLS, we define 3 fuzzy sets for , and the MFs are selected as follows:
Figure 5 shows the diagram of the MFs of the IT2 FLS. To cover all the cases, we apply 3 fuzzy rules, then is a function of . Define η1 = 25000 in (25), and select the initial value of as . As a result, the equivalent control law can be obtained. As for the switching control law, the initial value of is selected as , and is defined. Besides, choosing η2 = 10 and Ξ = 0.01 in (40). The initial states of the system are chosen as x (0) = [0, 0] T. The simulations are conducted based on MATLAB/Simulink, in which the ode45 solver is selected.
The MFs of the IT2 FLS.
Figures 6 and 7 show the control and observation performance of the angular position and velocity, respectively. As shown in Figs. 6 (a) and 7 (a), the output state trajectories, i.e., x1 and x2, converge well to their references, i.e., xd and . The tracking errors of the angular position and velocity, i.e., e1 and e2, are shown in Figs. 6 (b) and 7 (b), respectively, which illustrate that e1 and e2 tend to be stable quickly and the stability errors are pretty small. In addition, Figs. 6 (b) and (b) also show that the observation value of the tracking errors, i.e., and , are able to estimate the real tracking errors in high accuracy. As shown in Figs. 6 (c) and 7 (c), the observation errors of the angular position and velocity tracking errors, i.e. and , which can be considered as the observation errors of the states, i.e. and , are very small in stable state. The control input of the system is shown in Fig. 8, which illustrates a good input performance. The control input tends to smooth quickly, and the chattering problem is avoided. As shown in Fig. 9, the switching control gain increases dramatically at first, then reduces gradually, and becomes a constant (0.01) finally. That means, with the adaptive law (40), can increase rapidly to enhance the system robustness when the sliding surface is relatively far away from zero, on the contrary, can decrease gradually to reduce the chattering of the system when the sliding surface is relatively close to zero.
The control and observation performance of the angular position. (a) The reference position xd and the output position x1; (b) The tracking error of the angular position and its observation value; (c) The observation error of the angular position tracking error.
The control and observation performance of the angular velocity. (a) The reference velocity and the output velocity x2; (b) The tracking error of the angular velocity and its observation value; (c) The observation error of the angular velocity tracking error.
The control input u (t).
The switching control gain .
In order to verify that the IT2 FLS performs better than the type-1 FLS in the adaptive control scheme, the IT2 FLS is replaced with the type-1 FLS in the above simulation, and all the other parameter settings remain the same. The MFs of the type-1 FLS are selected as follows:
Figure 10 illustrates the tracking errors of the angular position and velocity with the direct adaptive IT2 fuzzy controller (proposed in this paper, note as Type-2 in the figure) and the direct adaptive type-1 fuzzy controller (note as Type-1 in the figure). From this figure, it can be seen that the tracking errors of the angular position and velocity tend to be stable more quickly with the proposed controller, as well as, the adaptive IT2 fuzzy controller has a better robustness. As a result, it is proved that the IT2 FLS performs better than the type-1 FLS in the adaptive control scheme.
Tracking errors of the angular position and velocity. (a) Position; (b) Velocity.
Conclusion
In this paper, a novel observer based direct adaptive interval type-2 (IT2) fuzzy sliding mode control (SMC) method has been presented for a class of SISO unknown nonlinear dynamical systems with unmeasured states. The proposed controller does not require any priori knowledge of model, disturbances, and state vector, and the system output is the only requirement to achieve the trajectory tracking control of the system. The high-gain observer is designed to estimate the tracking errors. In the presented control method, the equivalent control law is approximated by a SISO IT2 fuzzy logic system (FLS), which reduces the online computational load. A new adaptive switching control gain is applied to the sliding mode control law to reduce chattering. Besides, the convergence of the overall closed-loop system is proved based on the Lyapunov theorem and the Meyer-Kalman-Yakubovich (MKY) lemma. Finally, simulation results show the validity and the high control performance of the presented control scheme.
Declaration of interest statement
The authors declare that they have no conflict of interest.
Footnotes
Acknowledgments
This work was supported by the National Key Research and Development Project (Grant No. 2018YFB1308303) and the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).
References
1.
CastroJ.L., Fuzzy logic controllers are universal approximators, IEEE Trans Syst Man Cybern25(4) (1995), 629–635.
2.
YagerR.R. and KreinovichV., Universal approximation theorem for uninorm-based fuzzy systems modeling, Fuzzy Sets Syst140(2) (2003), 331–339.
3.
LiuZ. and LiH.X., A probabilistic fuzzy logic system for modeling and control, IEEE Trans Fuzzy Syst13(6) (2005), 848–859.
4.
RenC., TongS. and LiY., Fuzzy adaptive high-gain-based observer backstepping control for SISO nonlinear systems with dynamical uncertainties, Nonlinear Dyn67(2) (2011), 941–955.
5.
KarnikN.N., MendelJ.M. and LiangQ., Type-2 fuzzy logic systems, IEEE Trans Fuzzy Syst7(6) (1999), 643–658.
6.
ManceurM., EssounbouliN. and HamzaouiA., Second-order sliding fuzzy interval type-2 control for an uncertain system with real application, IEEE Trans Fuzzy Syst20(2) (2012), 262–275.
7.
LiH., WangJ., LamH.K., et al., Adaptive sliding mode control for interval type-2 fuzzy systems, IEEE Trans Syst Man Cybern46(12) (2017), 1654–1663.
8.
MendelJ.M., JohnR.I. and LiuF., Interval type-2 fuzzy logic systems made simple, IEEE Trans Fuzzy Syst14(6) (2006), 808–821.
9.
CaiM., XiangZ. and GuoJ., Adaptive finite-time control for uncertain nonlinear systems with application to mechanical systems, Nonlinear Dyn84(2) (2016), 943–958.
10.
ZhangF., HuaJ. and LiY., Indirect adaptive fuzzy control of SISO nonlinear systems with input–output nonlinear relationship, IEEE Trans Fuzzy Syst (2018), DOI: 10.1109/TFUZZ.2018.2800714
11.
MushageB.O., ChedjouJ.C. and KyamakyaK., Observer-based fuzzy adaptive fault-tolerant nonlinear control for uncertain strict-feedback nonlinear systems with unknown control direction and its applications, Nonlinear Dyn88(4) (2017), 2553–2575.
12.
TongS. and LiH.X., Fuzzy adaptive sliding-mode control for MIMO nonlinear systems, IEEE Trans Fuzzy Syst11(3) (2003), 354–360.
13.
LiY., TongS. and LiT., Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation, Fuzzy Sets Syst248 (2014), 138–155.
14.
GholamiA. and MarkaziA.H.D., A new adaptive fuzzy sliding mode observer for a class of MIMO nonlinear systems, Nonlinear Dyn70(3) (2012), 2095–2105.
15.
ZhangL. and YanY., Robust synchronization of two different uncertain fractional-order chaotic systems via adaptive sliding mode control, Nonlinear Dyn76(3) (2014), 1761–1767.
16.
GinoyaD., ShendgeP.D. and PhadkeS.B., Sliding mode control for mismatched uncertain systems using an extended disturbance observer, IEEE Trans Ind Electron61(4) (2014), 1983–1992.
17.
LiY. and XuQ., Adaptive sliding mode control with perturbation estimation and PID sliding surface for motion tracking of a piezo-driven micromanipulator, IEEE Trans Control Syst Technol18(4) (2010), 798–810.
18.
ZhuZ., XiaY. and FuM., Adaptive sliding mode control for attitude stabilization with actuator saturation, IEEE Trans Ind Electron58(10) (2011), 4898–4907.
19.
ZirkohiM.M. and LinT.C., Interval type-2 fuzzy-neural network indirect adaptive sliding mode control for an active suspension system, Nonlinear Dyn79(1) (2015), 513–526.
20.
ZhangF., LiY. and HuaJ., Direct adaptive fuzzy control of SISO nonlinear systems with input– output nonlinear relationship, Int J Fuzzy Syst20(4) (2018), 1069–1078.
21.
HwangJ.H., KwakH.J. and ParkG.T., Adaptive interval type-2 fuzzy sliding mode control for unknown chaotic system, Nonlinear Dyn63(3) (2010), 491–502.
22.
LiY., TongS. and LiY., Observer-based adaptive fuzzy backstepping dynamic surface control design and stability analysis for MIMO stochastic nonlinear systems, Nonlinear Dyn69(3) (2012), 1333–1349.
23.
ZhouQ., WuC. and ShiP., Observer-based adaptive fuzzy tracking control of nonlinear systems with time delay and input saturation, Fuzzy Sets Syst316 (2016), 49–68.
24.
MohammadzadehA. and HashemzadehF., A new robust observer-based adaptive type-2 fuzzy control for a class of nonlinear systems, Applied Soft Computing37 (2015), 204–216.
25.
CastilloO. and MelinP., Recent advances in interval type-2 fuzzy systems. SpringerBerlin Heidelberg (2012).
26.
LiangQ. and MendelJ.M., Interval type-2 fuzzy logic systems: Theory and design, IEEE Trans Fuzzy Syst8(5) (2000), 535–550.
27.
LinT.C., LiuH.L. and KuoM.J., Direct adaptive interval type-2 fuzzy control of multivariable nonlinear systems, Eng Appl Artif Intel22(3) (2009), 420–430.
28.
ShahnaziR., Observer-based adaptive interval type-2 fuzzy control of uncertain MIMO nonlinear systems with unknown asymmetric saturation actuators, Neurocomputing171 (2016), 1053–1065.
29.
ChangY.H. and ChanW.S., Adaptive dynamic surface control for uncertain nonlinear systems with interval type-2 fuzzy neural networks, IEEE Trans Cybern44(2) (2014), 293–304.
30.
KungC.C. and ChenT.H., Observer-based indirect adaptive fuzzy sliding mode control with state variable filters for unknown nonlinear dynamical systems, Fuzzy Sets Syst155(2) (2005), 292–308.
31.
AtassiA.N. and KhalilH.K., Separation results for the stabilization of nonlinear systems using different high-gain observer designs, Syst Control Lett39(3) (2000), 183–191.
32.
LiY. and TongS., Adaptive Fuzzy Output-Feedback Stabilization Control for a Class of Switched Nonstrict-Feedback Nonlinear Systems, IEEE Trans Cybern47(4) (2017), 1007–1016.
33.
WeiD., LuoX. and ZhangB., Synchronization of brushless DC motors based on LaSalle invariance principle, Nonlinear Dyn69(4) (2012), 1733–1738.
34.
SlotineJ.E. and LiW., Applied nonlinear control. Upper Saddle River, NJ: Prentice-Hall (1991).
35.
LiuY.J., TongS. and LiT., Observer-based adaptive fuzzy tracking control for a class of uncertain nonlinear MIMO systems, Fuzzy Sets Syst164(1) (2011), 25–44.
36.
ChenB.S., LeeC.H. and ChangY.C., ∞ tracking design of uncertain nonlinear SISO systems: Adaptive fuzzy approach, IEEE Trans Fuzzy Syst4(1) (1996), 32–43.
37.
SaghafiniaA., PingH.W. and UddinM.N., Fuzzy sliding mode control based on boundary layer theory for chattering-free and robust induction motor drive, Int J Adv Manuf Technol71 (2014), 57–68.
38.
WangY., ShenH., KarimiH.R., et al., Dissipativity-based fuzzy integral sliding mode control of continuous-time T-S fuzzy systems, IEEE Trans Fuzzy Syst26(3) (2018), 1164–1176.