
Abstract
In this paper, we study the single-machine scheduling problem and obtain some new results on the special time-delay structure and mixed precedence constraints. We first demonstrate the complexity of the ordinary problem under different circumstances and obtain two cases, namely a polynomial solvable case and an NP-complete case. Then, we present a fuzzy extension of the ordinary problem, based on which a representation of the non-dominated solutions is given for the fuzzy scheduling problem. Finally, we demonstrate the complexity of fuzzy extension problems under different time delays by proposing corresponding algorithms.
Keywords
Introduction
Single-machine scheduling problem with precedence constraints has been the subject of intensive research since the late 1960s [1–10]. The ordinary precedence constraints are given by a strict binary partial relation on the set of jobs and reflect the ordering between jobs, which is not liable to any change under any circumstance. To describe a more flexible situation, Ishii and Tada first applied fuzzy precedence constraints to single-machine scheduling problem [11]. The fuzzy precedence constraints, which can be broken in some cases, reflect the satisfaction level with respect to the precedence between jobs. Machine scheduling problems with such constraints may occur in many situations in modern automated systems. Levner and Vlach [12] extended the problem model to a mixed precedence structure that includes both ordinary and fuzzy precedence constraints. They demonstrated that the two types of precedence constraints not only have different physical natures, but also require different algorithmic treatments in the scheduling problems. Xie et al. [13] investigated a bi-criteria single-machine scheduling problem involving fuzzy precedence constraints and fuzzy due dates. Through the search of non-dominated schedules, they constructed an O (n3) optimal algorithm. Li et al. [14] first applied fuzzy precedence constraints to a single-machine batch scheduling problem to minimize the makespan and maximize the minimum value of the desirability of the fuzzy precedence. They solved the problem by seeking non-dominated batch sequences. Shortly thereafter, Li et al. [15] applied fuzzy precedence constraints to a single-machine parallel-batching problem with a fuzzy due date, and presented an efficient algorithm to seek a non-dominated solution. Li et al. [16] considered a single machine due date assignment scheduling problem with precedence constraints and controllable processing times in fuzzy environment. They demonstrated the complexity of the scheduling problem and provided a polynomial time algorithm for the special case of the problem. More applications of fuzzy precedence constraints can be seen in the recent review [17].
Another stream of research considers single-machine scheduling problems with time-delay constraints. Wikum et al. [18] applied generalized precedence constraints to a single-machine scheduling problem to minimize the makespan, and demonstrated that the problem is computationally intractable. The generalized precedence constraints are actually time-delay constraints specifying that when job J i precedes job J j , the time between the completion of job J i and the start of job J j must be within a specified range. The range of time delays may depend on the machine and the jobs under consideration. Such time delays resemble setup times, but differ in an essential way; setup times can only occur between two consecutively scheduled jobs, whereas time delays can occur between any two jobs, even if other jobs are scheduled between them. Finta and Liu [19] investigated a single-machine scheduling problem with precedence delays for the minimization of the makespan. They showed that the problem is NP-hard when jobs have unit processing times and precedence delays have integer lengths, and provided an O (n2) optimal algorithm when jobs have arbitrary integer processing times and precedence delays have unit lengths. Muthusamy et al. [20] considered a fuzzy extension of one of the polynomial solvable cases of a single-machine scheduling problem with time delays studied by Wikum et al. [18]. The extension allowed time delays and precedence relations to be fuzzy. They evaluated feasible schedules by three measures of performance, and demonstrated that the problem of finding a set of non-dominated feasible schedules can be solved in polynomial time. Subsequently, Xie et al. [21–23] investigated the single-machine scheduling problem involving the same fuzzy time-delay structure as that proposed by Muthusamy et al. [20]. Time-delay constraints have received considerable attention from researchers, and have been applied not only to various machine scheduling problems [24–30], but also to robust control [31], economy model [32], neural networks [33, 34] and in-vehicle network [35].
As two important branches in the field of scheduling theory, the combination of precedence constraints and time delays has aroused the interest of some researchers [20, 35]. Muthusamy et al. [20] and Xie et al. [22] applied time delays and precedence relations to single-machine scheduling problem. Darbandi et al. [35] investigated the holistic schedule which satisfy delay constraints and precedence constraints between tasks schedules and messages transmissions on in-vehicle networks. The fuzzy environment describes a more flexible situation and has better universality. In this paper, the single-machine scheduling problem with special time-delay structure and mixed precedence constraints including both ordinary and fuzzy precedence constraints is investigated. Our time-delay structure, in which there exists a job that has always been in the first position in any feasible schedule, is different from those discussed in the existing literature [18, 20–23]. To the best of our knowledge, such a problem has not been studied. We will demonstrate the complexity of the ordinary problem under different circumstances and present fuzzy extension of the ordinary problem. Time delays and precedence constraints are to be fuzzy in the fuzzy extension. We evaluate feasible schedules of the fuzzy extension by three measures of performance: the makespan, the degree of satisfaction with fuzzy time delays, and the degree of satisfaction with mixed precedence constraints. Furthermore, we will demonstrate the complexity of fuzzy extension under different time delays by proposing corresponding algorithms. The universality of Lawler’s theorem is also proved when seeking non-dominant feasible schedules for the fuzzy extension.
The remainder of this paper is organized as follows. Section 2 presents the notation and ordinary problem description. In Section 3, we demonstrate the complexity of the ordinary problem, and in Section 4, we present the fuzzy extension of the ordinary problem. In Section 5, the complexity of fuzzy extension under different time delays is demonstrated by proposing corresponding algorithms. Section 6 presents two numerical examples, which is followed by the conclusion in Section 7.
Preliminary
There are n + 1 jobs, J0, J1, J2, ⋯ , J n , to be scheduled on a single machine. The objective is to minimize the makespan. It is assumed that the machine is continuously available and can process only one job at a time. Job splitting and pre-emption are not allowed. All jobs are available for processing at time zero. For simplicity, let p i denote the processing time of job J i for each i = 0, 1, 2, ⋯ , n, the beginning time of J i is s (J i ), π is a feasible schedule, and C i (π) is the completion time of job J i in schedule π. Π is the set of all feasible schedules.
For the special time-delay structure, let J denote the set of jobs J1, J2, ⋯ , J n , i.e., J = {J1, J2, ⋯ , J n }. Every feasible schedule satisfies the time-delay constraints [l i , u i ] for each J i ∈ J, which means that the lower and upper bounds for time delay between J0 and J i are given by l i and u i , respectively, satisfying 0⩽ l i ⩽ u i < + ∞. In other words, job J0 is always the first job in any feasible sequence, and the time between the completion of job J0 and the start of job J i ∈ J is at least l i and no more than u i (see Fig. 1). Note that the time delay between J0 and J i is actually an ordinary precedence constraint when l i = 0 and u i =∞.
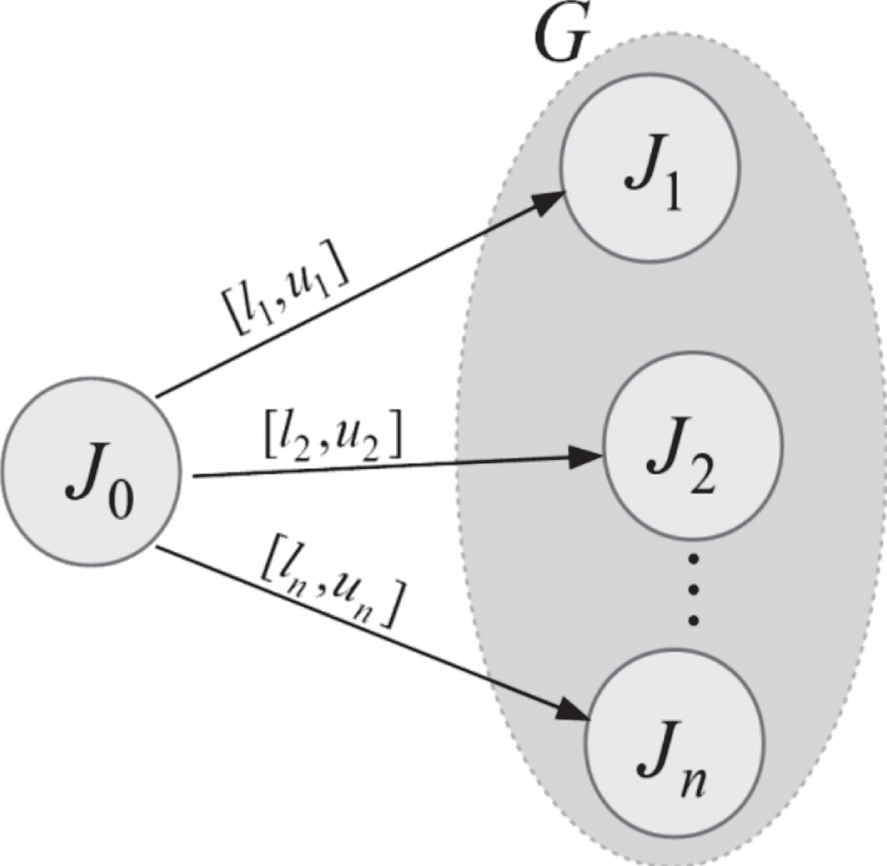
Time-delay constraints graph.
In addition, the jobs from the set J should be processed according to ordinary precedence constraints. For convenience of description, the precedence relations in the set J are represented by a directed graph G = G (V, A), where V is the set of jobs J i for J i ∈ J, and A is the set of arcs (J i , J j ) such that J i ≺ J j , i.e., J i precedes J j . Jobs J i and J j are independent, which means that (J i , J j ) and (J j , J i ) are not in G = G (V, A).
As mentioned above, the ordinary problem can be formulated as follows.
In this section, we will demonstrate the complexity of Problem P with time delays in the following three cases: [0, u
i
] for i = 1, 2, ⋯ , n; [l
i
, ∞) for i = 1, 2, ⋯ , n; [l
i
, 1ptu
i
], l
i
> 0, and u
i
is a nonnegative real number for i = 1, 2, ⋯ , n.
First, we give the following necessary lemmas.
In the following, we present some new results for Problem P.
The time delays between J0 and J i ∈ J are given by [0, u i ], i = 1, 2, ⋯ , n. If we assume that job J i ∈ J has due date d i = p0 + u i + p i , then there is a schedule that satisfies all due dates if and only if the schedule satisfies the time delays.
(“If”) For any feasible schedule π, assume that the completion time of job J i ∈ J is C i (π). Obviously, C i (π) ⩽ p0 + u i + p i = d i for i = 1, 2, ⋯ , n. Hence, if we have a feasible schedule that satisfies the time delays, then it must satisfy all due dates.
(“Only If”) Suppose there is a schedule π that satisfies all due dates, that is,
It implies
Therefore, schedule π satisfies the time delays.
Thus, Problem P can be transformed to that of finding a schedule, if it exists, subject to the given precedence constraints, such that each job will be completed by its due date. According to
Obviously, in schedule π = (J0, σ), the start time of job J i must be at least r i = p0 + l i for all i = 1, 2, ⋯ , n. Therefore, if we have a feasible schedule that satisfies the time delays, then it must satisfy these release times.
Suppose there is a schedule π = (J0, σ) that satisfies all release times, that is, s (σ (i)) ⩾ rσ(i) for each i = 1, 2, ⋯ , n. Then, for i = 1, 2, ⋯ , n,
This implies s (σ (i)) - C0 ⩾ lσ(i) for i = 1, 2, ⋯ , n. Therefore, schedule π = (J0, σ) satisfies the time delays. □
In the following, we further demonstrate that the problem can be transformed into the scheduling problem that minimizes the makespan only subject to the revised release dates. Similar to the above theorem, we only need to consider the semi-active schedule.
Revise the release dates, make
The makespan can be minimized, subject to the given precedence constraints, if and only if the new jobs are ordered according to increasing values of
The “if” part is obvious, so we consider that there exists a hypothetical sequence that minimizes the makespan, but in which the jobs are not ordered according to increasing values of
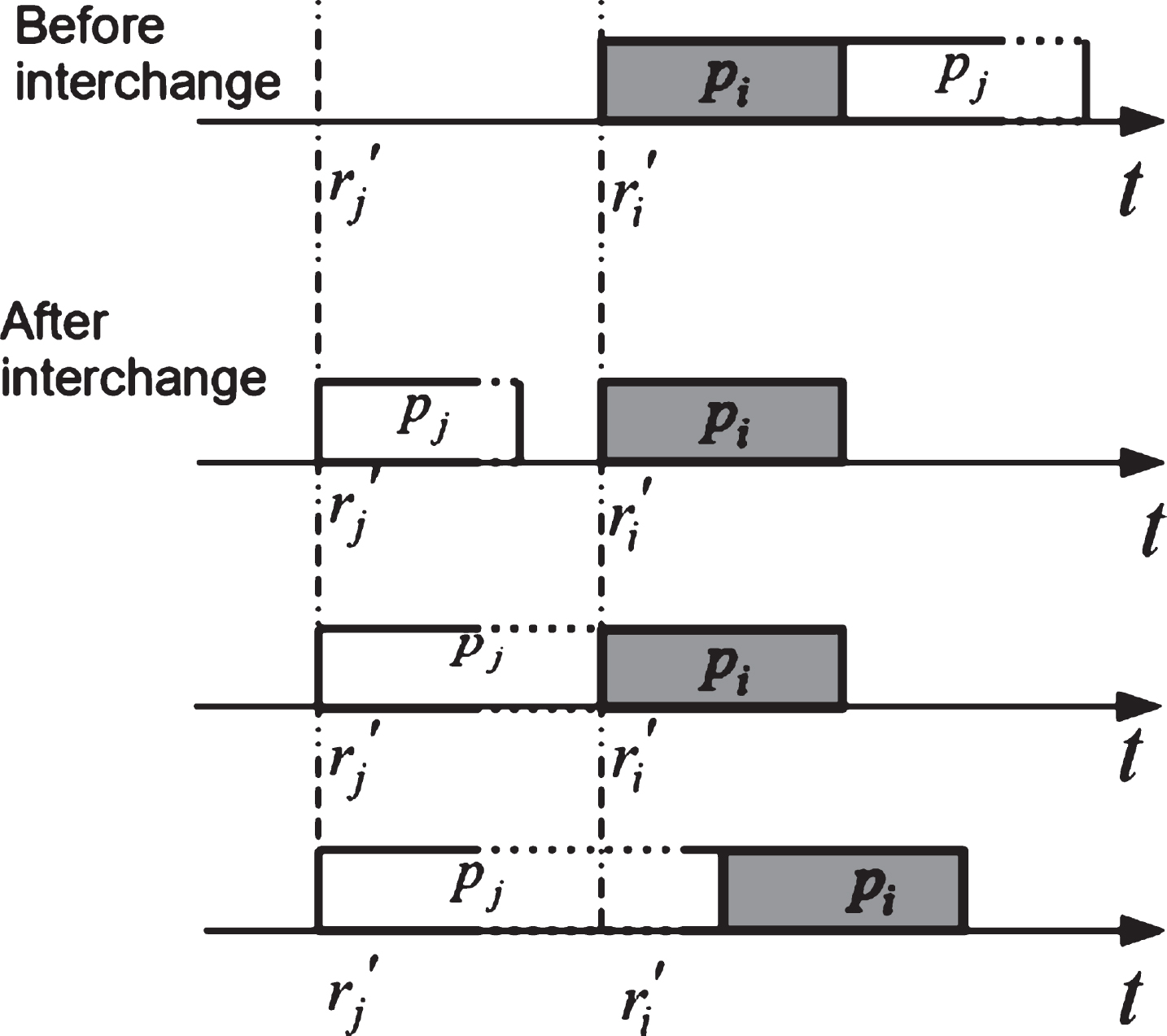
Interchange the positions of J i and J j .
Therefore, Problem P under consideration can be transformed to the scheduling problem that minimizes the makespan, and is only subject to the revised release dates. We can obtain the optimal schedule by sequencing the new jobs according to increasing values of
The modification of release dates requires O (n2). After this, the jobs are ordered according to increasing
In what follows, we will consider fuzzy extension of Problem P while allowing time delays and precedence relations to be fuzzy.
In the case [0, u
i
], time-delay constraints are fuzzified. We assume that U
i
is a fuzzy upper bound of the time delay between J0 and J
i
. U
i
can be formulated as the fuzzy interval
The crisp time delay u
i
can be interpreted as the limit case for
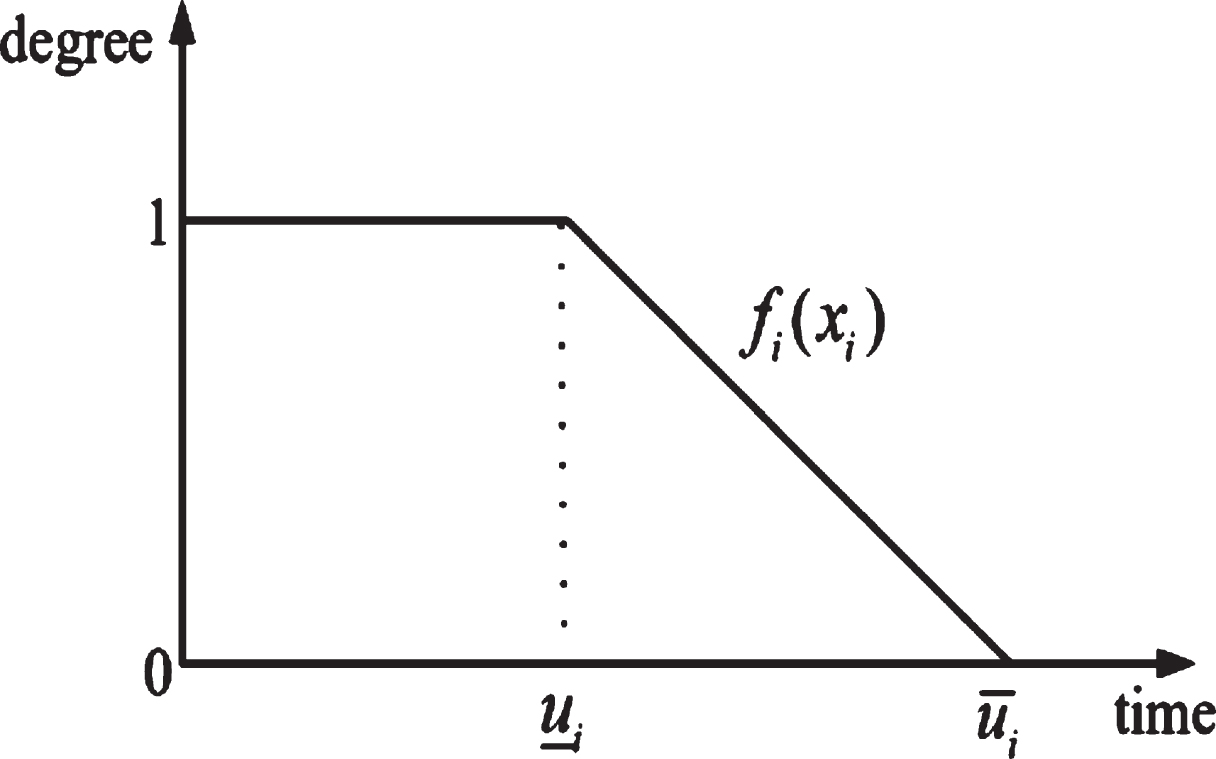
Degree of satisfaction with fuzzy upper bound.
In the case [l
i
, ∞), the upper bound of the time delay is infinite. We assume that the lower bound L
i
of the time delay between J0 and J
i
is fuzzified. L
i
can be formulated as the fuzzy interval
The crisp time delay l
i
can be interpreted as the limit case for

Degree of satisfaction with fuzzy lower bound.
In the case [l
i
, 1ptu
i
], we assume that the lower bound L
i
and the upper bound U
i
of the time delay x
i
between J0 and J
i
are fuzzified. L
i
and U
i
can be formulated as the fuzzy interval
Time delay x
i
between J0 and J
i
is considered as feasible whenever
In addition, the jobs from the set J = {J1, J2, ⋯ , J n } are subject to mixed precedence constraints, i.e., the jobs from J may be processed in ordinary precedence order or in fuzzy precedence order. Fuzzy precedence constraint is denoted by the membership function μ ij for any two jobs J i and J j , which expresses the degree of satisfaction that job J i is processed before job J j . Because either J i is processed before J j or vice versa, we assume that μ ji = 1 if 0 ⩽ μ ij < 1. This can be interpreted as a normalization condition, and that μ ji is the preferred order and has a satisfaction degree 1. Both μ ij and μ ji equal 1 if jobs J i and J j are independent.

Degree of satisfaction with fuzzy lower bound and fuzzy upper bound.
As mentioned above, the fuzzy scheduling problem can be expressed as follows.
The makespan of schedule π, denoted by
For every feasible schedule π, we denote the minimum degree of satisfaction of fuzzy time delays by
For convenience, we denote the feasible schedule π = (J0, σ), and σ = (σ (1) , σ (2) , ⋯ , σ (n)) is a permutation sequence of the jobs in J, where σ (k) represents the job that occupies position k in sequence σ. Then, for schedule π, the minimum degree of satisfaction with mixed precedence constraints is
The objective is to find an optimal schedule π to minimize the makespan, maximize the minimum degree of satisfaction with fuzzy time delays, and maximize the minimum degree of satisfaction with mixed precedence constraints. However, it is possible that no feasible schedule optimizes
The fuzzy extension of the ordinary problem is more complicated and the ordinary problem is just a special case of the fuzzy problem. In the case of [l i , u i ], Problem P is proved to be NP-complete in the strong sense, so its fuzzy extension FP must also be a strongly NP-complete problem. However the complexity of the corresponding fuzzy problem remains unknown when the ordinary problem is polynomial solvable. In this section, we will demonstrate that Problem FP is polynomial solvable by proposing corresponding algorithms in the case of [0, u i ] and [l i , ∞) respectively.
Sort 0 < μ
ij
< 1 in non-increasing order. Let the result be μ0 = 1 > μ1 > μ2 > ⋯ > μ
k
> 0, where k is the number of different μ
ij
. G0 (V, A0) is the mixed precedence digraph obtained from the ordinary precedence graph G (V, A) by adding to it all arcs (J
i
, J
j
) corresponding to the fuzzy precedence constraints with μ
ij
= 1, i.e.,
In this paper, we suppose the directed graph G0 (V, A0) is acyclic. G
l
(V, A
l
) is the mixed precedence digraph obtained from G0 (V, A0) by deleting all arcs (J
i
, J
j
) such that μ
ij
= 1 and μ
ji
⩾ μ
l
, i.e.,
In the case [0, u i ]
There are mixed precedence constraints between jobs from set J. The feasibility of schedules is further constrained by requiring that the time between the completion of J0 and the beginning of J i (J i ∈ J) must be less than or equal to a given fuzzy number U i .
Single machine fmin maximization problem
To solve the fuzzy problem FP, in this subsection, we consider a single-objective scheduling problem in which, instead of the mixed precedence relation, there is only ordinary precedence relation, and a single objective function fmin is to be maximized. The problem can be stated as follows.
Although there are fuzzy time delays between J0 and jobs from J, the problem FP1 is similar to the well-known 1973 Lawler’s problem [38]. The difference between these two problems is that they have opposite objective functions. The problem discussed in this paper is to maximize the minimum of fuzzy monotone non-increasing functions, while Lawler’s problem is to minimize the maximum of the monotone non-decreasing functions. In the following result, we will prove that Lawler’s theorem remains feasible and valid for the proposed fuzzy monotone non-increasing functions in this paper.
We exchange the positions of J k , B and Jk′ to obtain:
If the given ordinary precedence constraints are observed by schedule π′, then they are also observed by schedule π, since neither J k nor Jk′ is required to precede any others. Obviously, no job except job J k is completed later in π than in π′. Because the degree of satisfaction of fuzzy time delays is a monotone non-increasing function, it follows that no job’s degree of satisfaction of fuzzy time delays can be smaller in π than in π′, except possibly job J k . However, job J k satisfies Equation (8). Hence, the minimum degree of satisfaction of fuzzy time delays is no less for sequence π than for π′. □
Sequence the jobs from last to first, always choosing next from among the jobs not required to precede any others in the current set. An efficient algorithm for finding an optimal schedule for Problem FP1 follows from
The algorithm for the problem FP1
Description: Let I denote the set of jobs that have been scheduled. I′, the complement of I, is the set of unscheduled jobs. Let U denote the set of jobs that may be performed last with respect to the ordinary precedence relation in set I′. The construction of U is based on the outdegree of the vertex in the directed graph corresponding to I′. The complexity of the algorithm is O (n2).
For Problem FP, one of the objectives is to minimize the makespan, and we only need to consider the feasible schedule with no idle time during job processing, i.e., all jobs from J are processed in the interval [p0, p0 + p1 + ⋯ + p
n
]. The earlier the job is completed, the smaller the time delay is for every job J
i
∈ J in the same processing order; therefore, the degree of satisfaction with fuzzy time delays must be greater, for it is non-increasing, and
Based on the above analysis, an efficient algorithm for finding a set of non-dominated feasible schedules for Problem FP in the case of [0, u i ] can be proposed, as in Table 2.
The algorithm for the problem FP in the case [0, u
i
]
The algorithm for the problem FP in the case [0, u i ]
Description: All jobs from J are processed in the interval [p0, p0 + p1 + ⋯ + p n ]. DV is the current set of non-dominated schedule vectors. DS is the current set of schedules corresponding to DV. DS provides the set of all non-dominated solutions. k is the number of different μ ij .
The complexity of Algorithm 2 is O (n4). Without loss of generality, we assume that any two jobs have different membership function values. In step 1, sorting μ ij in non-increasing order and constructing G l (V, A l ) require at most O (n2 log n) operations. In step 2 and step 3, solving the problem G l (V, A l ) requires O (n2) operations according to the complexity of Algorithm 1. Step 2 is repeated at most O (n2) times, each requiring at most O (n2) operations. The construction of precedence relation graph G l (V, A l ) requires at most O (n2) operations. Therefore, the overall time complexity of the algorithm is O (n4).
In this case, for each job J
i
∈ J, in addition to being subject to the mixed precedence constraints, the time between the completion of J0 and the beginning of J
i
must be greater than or equal to a given fuzzy number L
i
. We assign three measures
Bi-criteria scheduling problem
In this subsection, we consider a bi-criteria scheduling problem. The problem can be stated as follows.
These two goals, fmin and Cmax, contradict each other. Therefore, we cannot optimize the two criteria simultaneously. Here, we still use non-dominated solutions to solve such a problem. The schedule vector
subject to
Let a real number t ∈ [0, 1] be the minimum value of the objective function (9), i.e.,
If we assume that each job J
i
has release date R
i
(t), i = 1, 2, ⋯ , n, then the problem FP2 can be transformed into the following scheduling problem FP2′.
subject to
Obviously, if t is fixed, the problem FP2′ is the scheduling problem that minimizes the makespan subject to given release dates and ordinary precedence constraints. An optimal solution of FP2′ can then be found by modifying the release dates of the jobs according to ordinary precedence constraints and scheduling the jobs in non-decreasing order of the modified release dates. However, parametrized release dates R i (t) change according to t. We calculate all t = t ij (i ≠ j) that satisfy R i (t) = R j (t), and we can get
Then, select only these t
ij
that satisfy 0 < t < 1, sort such t
ij
in increasing order, and let the result be
where ɛ is a small number and iɛ is used to break ties. Note that J
i
≺ J
j
implies
An efficient algorithm for finding the set of non-dominated feasible schedules for the problem FP2 follows immediately. As shown in Table 3.
The algorithm for the problem FP2
Description: W is the current set of non-dominated schedule vectors. S is the current set of schedules corresponding to each vector of W. S provides the set of all non-dominated solutions. q is the number of different 0 < t ij < 1, and obviously q ⩽ n (n - 1)/2.
In step 1, renumber the jobs of set J in topological order and set B i to require O (n2) operations. Sorting t ij in increasing order requires at most O (n2 log n) operations. In step 2, compute R i (t c ) to require O (n) operations, modify release dates to require O (n2) operations, and find a processing order of jobs that requires O (n log n) operations so that step 2 requires O (n2) operations. Step 2 is repeated at most O (n2) times, each requiring O (n2) operations. Hence, the overall time complexity of the algorithm is O (n4).
In this subsection, we consider the fuzzy problem FP. There are two criteria
The algorithm for the problem FP in the case [l
i
, ∞)
The algorithm for the problem FP in the case [l i , ∞)
Description: DV is the current set of non-dominated schedule vectors. DS is the current set of schedules corresponding to each vector of DV. DS provides the set of all non-dominated solutions. k is the number of different μ ij . r = q, q - 1, ⋯ , 0. q is the number of different 0 < t ij < 1.
The complexity of the algorithm for Problem FP is O (n6). Without loss of generality, we assume that any two jobs have different membership function values. In step 1, sorting μ ij in non-increasing order and constructing G l (V, A l ) require at most O (n2 log(n)) operations. In step 2 and step 3, solving problem G l (V, A l ) requires O (n4) operations, according to the complexity of Algorithm 3. Step 2 is repeated O (n2) times, each requiring at most O (n4) operations. The construction of precedence graph G l (V, A l ) requires at most O (n2) operations. Thus, the total time for step 2 and step 3 is O (n6). Therefore, the overall time complexity of the algorithm is O (n6).
In this section, we provide two examples to illustrate the algorithms previously discussed.
Job J i ∈ J(i = 1, 2, 3, 4) cannot be started until job J0 is completed.
Processing times:
Ordinary precedence constraints: J1 precedes J4.
Fuzzy precedence constraints:
Fuzzy time delays:
We seek to obtain a set of non-dominated schedules that satisfy the fuzzy time delays and mixed precedence constraints.
The proposed algorithms work as follows.
Step 1: We obtain k = 2 and 1 = μ0 > μ1 > μ2 > 0, where μ1 = μ31 = 0.9 and μ2 = μ42 = 0.8. Construct precedence graph G l (V, A l ) (see Fig. 6).

Precedence graph G i (V, A i ).
Step 2: Step 2 is performed sequentially three times. At each iteration of step 2, the corresponding problem G l (V, A l ) is solved with the help of Algorithm 1. The corresponding solutions are presented in Table 5.
Solutions of G l (V, A l )
Note that π1 and π3 constitute the set of non-dominated schedules for
Job J i ∈ J(i = 1, 2, 3, 4, 5) cannot be started until job J0 is completed.
Processing times:
Ordinary precedence constraints:
J1 precedes J4, J2 precedes J3.
Fuzzy precedence constraints:
Fuzzy time delays:
We seek to obtain a set of non-dominated schedules that satisfy the fuzzy time delays and mixed precedence constraints.
The proposed Algorithm 3 and Algorithm 4 work as follows.
Step 1: Sort all μ ij to obtain 1 = μ0 > μ1 > μ2 > 0 and k = 2, where μ1 = μ31 = 0.9 and μ2 = μ52 = 0.8.
According to the fuzzy time delays, we obtain
Calculate all R i (t) = R j (t) , (i ≠ j); after sorting them, we obtain q = 2 and 0 = t0 < t1 < t2 < t3 = 1, where t1 = 1/3, t2 = 1/2.
Step 2: Step 2 is performed sequentially three times. According to Algorithm 3, solve problem G l (V, A l ). The corresponding precedence graph G l (V, A l ) is shown in Fig. 7. The results of each iteration are shown in Table 6.

Precedence graph G i (V, A i ).
Solutions of G l (V, A l )
Note that schedules π9 and π10 are discarded because they are dominated by schedule π3. Five remaining schedules π1, π2, π3, π7, and π8 constitute the set of non-dominated solutions for
Cmax, fmin and μmin contradict each other. In order to save costs and make more profits, manufacturers hope that Cmax is as small as possible. However, customers want both fmin and μmin to be as large as possible. These three criteria cannot be optimal simultaneously, based on which we use non-dominated solutions to maintain the balance of these three criteria.
In this paper, the complexity of Problem P with precedence constraints is analysed under different time delays. In the cases of [0, u i ] and [l i , ∞), Problem P is proved to be a polynomial solvable problem. In the case of [l i , u i ], Problem P is proved to be NP-complete in the strong sense. Then we present fuzzy extension of Problem P with fuzzy time delays and mixed precedence constraints in these three cases. The non-dominated solutions are evaluated by their makespan, degrees of satisfaction with fuzzy time delays, and degrees of satisfaction of mixed precedence constraints. Furthermore, we demonstrate the complexity of fuzzy problem FP under different time delays. Fuzzy extension FP is a strongly NP-complete problem in the case of [l i , u i ]. In the cases of [0, u i ] and [l i , ∞), the fuzzy problem FP is proved to be a polynomial solvable problem. We also prove that Lawler’s theorem is widely applicable. It can be applied not only to monotone non-increasing functions, but also to monotone non-decreasing functions; it can be applied to ordinary problems, and also to fuzzy problems. However, in this study, we only focus on the complexity of the problems P and FP. In the near future, we will continue to pay attention to the fuzzy extension FP in the case of [l i , u i ] and try to solve the problem using fuzzy intelligent optimization algorithm. The more general situation in which fuzzy time delays occur between arbitrary pairs of jobs is also our future topic.