This paper deals with the problem of quantized state feedback H∞ control for T-S fuzzy systems with appearing the communication delay under stochastic nonlinearity. To accomplish the objective a uniform framework for effective bandwidth utilization is employed to design co-design method. First of all, the co-design method is proposed such that the data can be communicated according to some logic function. Then, we implemented the measurement size-reduction scheme, using the logarithmic quantization. Additionally, we provided the impact of co-design method and quantization, on the original model of networked control systems (NCSs) is redeveloped as a new structure of hybrid-triggered NCSs with network induced delay. Moreover, Lyapunov-Krasovskii functional is considered to grantee the closed-loop for stochastic stability analysis of the T-S fuzzy system. The solvability of Lyapunov-Krasovskii functional results in the formation of Linear matrix inequalities. The solution of Linear matrix inequalities leads to the controller gains to perform simulations to validate the proposed scheme.
To appropriately model the physical systems it is appealing to describe both dynamic and static behaviors simultaneously. Fuzzy systems attained sufficient attention from the researchers in the past decades. In contrast to conventional state-space representation fuzzy systems describes, which comes from [1,2, 1,2], the practical demonstration of real-world applications which includes large-scale systems, electric power systems [3], tracking control [4] and economic systems. Fuzzy systems whose dynamic part is represented by differential equations and relationship between different sections of the systems are described by algebraic equations [5–8].
It is known that the quantization phenomenon is commonly observed in real-world applications and usually deteriorates the stability of a control system [9, 10] {and observer-based controller in [11, 12]. Under the circumstances of a communication channel, in the closed-loop circuit, a real-valued data of the controller and ones of the model are always projected into some piecewise-constant signals before broadcast. In some kinds of literature, some authors have been investigated in this direction, for example [13, 14]. In [14], for T-S fuzzy systems, the state-feedback controller was designed. Therefore, in the practical and realistic example, the state-feedback consists of some critical limitations that the states of the system can not be attained on account of method or are always difficult to get [15–17]. Besides, authors have been designed as an effective algorithm to overcomes the nonlinearities via an adaptive fuzzy controller in [18–20]. Furthermore, the measurements of the sensor before the transmission of signal and the output of the fuzzy controller require new quantized techniques. Therefore, motivated by the above-mentioned work, we want to design a fuzzy feedback controller with network control systems.
Recently Network control systems are getting too much attention in modern research [21, 22]. On the other hand, communication resource saving is also a significant issue for networked systems because the bandwidth resource becomes more and more limited as the complexity of the network increase. In NCS the data from the sensor to a controller and from the controller to the actuator is transferred through a common network [23, 24]. Such type of mechanism is preferred in distributed control of modern industries including large power systems [25]. Comparing with traditional control NCS is unpredictable due to time-varying delays in network and data dropouts. Therefore match premise requirement is not fulfilled in NCS [26]. As mentioned above in Network controlled applications time-varying delays occur due to limited capacities of data analysis and transmission between different sections of plants over a common network. So delay is considered as a key source of instability [27–30]. Currently, T-S fuzzy systems got an extension to handle the problem synchronization for networked control systems [31, 32]. The stability of such type systems is more challenging than normal regular systems because of networked induced delay. In this regard, a few result is obtained for details sees [35–37]. But still is open research for T-S fuzzy systems which is one of the motivation.
In this research work, the H∞ fuzzy controller design under the stochastic nonlinearity of networked systems with energy constrain is investigated. The main aim of this article is to manage the network burden of a network-based controlled plant. To accomplish the goal, we introduced two methods to increase the network rate and guarantee communication reliability. Firstly, a new time-event triggered mechanism is established in such a way that the signal packages are communicated according to the law of event trigger and time trigger toggling to each other. Also, the co-design method can not only eradicate a huge number of irrelevant data packages but also keep some of the common information, which keeps the stability of the system and tackles the channel burden. After this, we prosed the logarithmic quantizer to further decrease the magnitude of the signal package. Based on the Lyapunov function method with stochastic analysis methodology and fuzzy controller gains are obtained by solving the linear matrix inequalities. In addition, this paper considers the state feedback H∞ control design problem for the T-S fuzzy system by using the co-design method. The main contributions of this paper can be highlighted as follows:
Different from the existing literature [38, 39], a new hybrid-time-event triggered communication mechanism is constructed such that quantized data is chosen for communication. Compared with the existing theory, co-design method not only eliminates the communication burden efficiently but also can increase the performance of the system.
The co-design method with the data quantization is firstly proposed for the T-S fuzzy system with NCSs to save the channel transmission energy. Compared with the only co-design method or only quantization scheme, the presented method in this paper is more stable.
Under the scheme co-design method with quantization behavior, the traditional NCSs model is transferred to a new hybrid-triggered NCSs with networked induced delay and stochastic nonlinearities. Based on this model, the resolve of the triggering parameters and the fuzzy controller gains can be obtained by solving the linear matrix inequalities simultaneously.
Furthermore, as two special scenarios, the time-triggered (event-triggered) stability and fuzzy controller design are also established for NCSs.
The rest part of the paper is organized as follows. In Section 2, we describe the problem formulation. Section 3 presents the sufficient conditions for co-design method design scheme for the underlying system. Section 4 shows the fuzzy controller designing. Numerical examples and simulation results are provided in Section 5. The conclusion of this paper is made in Section 6.
Notations: Throughout this paper, a real symmetric matrix X > 0 (X ≥ 0) means that X is positive definite (respectively, positive semi-definite) matrix; XT represents transpose of the matrix X; Rnx and Rnx×my stand for nx-dimensional Euclidean space and set of all nx × my real matrices; In denotes the n-dimensional identity matrix; diag {·· ·} stands for a block diagonal matrix. The notation ★ is used as an ellipsis for terms that are induced by symmetry; is the space of square-integrable vector function over [0, ∞); ∣· ∣ denotes the Euclidean norm for vectors. Matrix dimensions, if not explicitly stated are assumed to be compatible for algebraic operations.
System description and problem formulation
Consider a continues class of T-S fuzzy system with network control system described as: Plant Rulei: IF ϑ1 is and...and ϑg is , THEN
Where r is the number of IF-THEN rules, ϑ1 (t) , ϑ2 (t) , ·· · , ϑg (t) are the premise variables, x (t) ∈ Rnx, y (t) ∈ Rny and u (t) ∈ Rnu represents the state variable, output vector and control input respectively and ω (t) ∈ Rnω represents the disturbance signal that belongs to , g (t, x (t)) is nonlinear function. , , and are the system matrices with proper dimensions. By using center-average defuzzifier, product interference and singleton fuzzifier, the obtained fuzzy system (1) is inferred as follows:
where , , and . Abbreviation of hi stands for hi (ϑ (t)). , shows the grade membership value of ϑj (t) in and hi (ϑ (t)) fulfills hi (ϑ (t)) >0, . For our convince and simplicity, we present hi instead of hi (ϑ (t)).
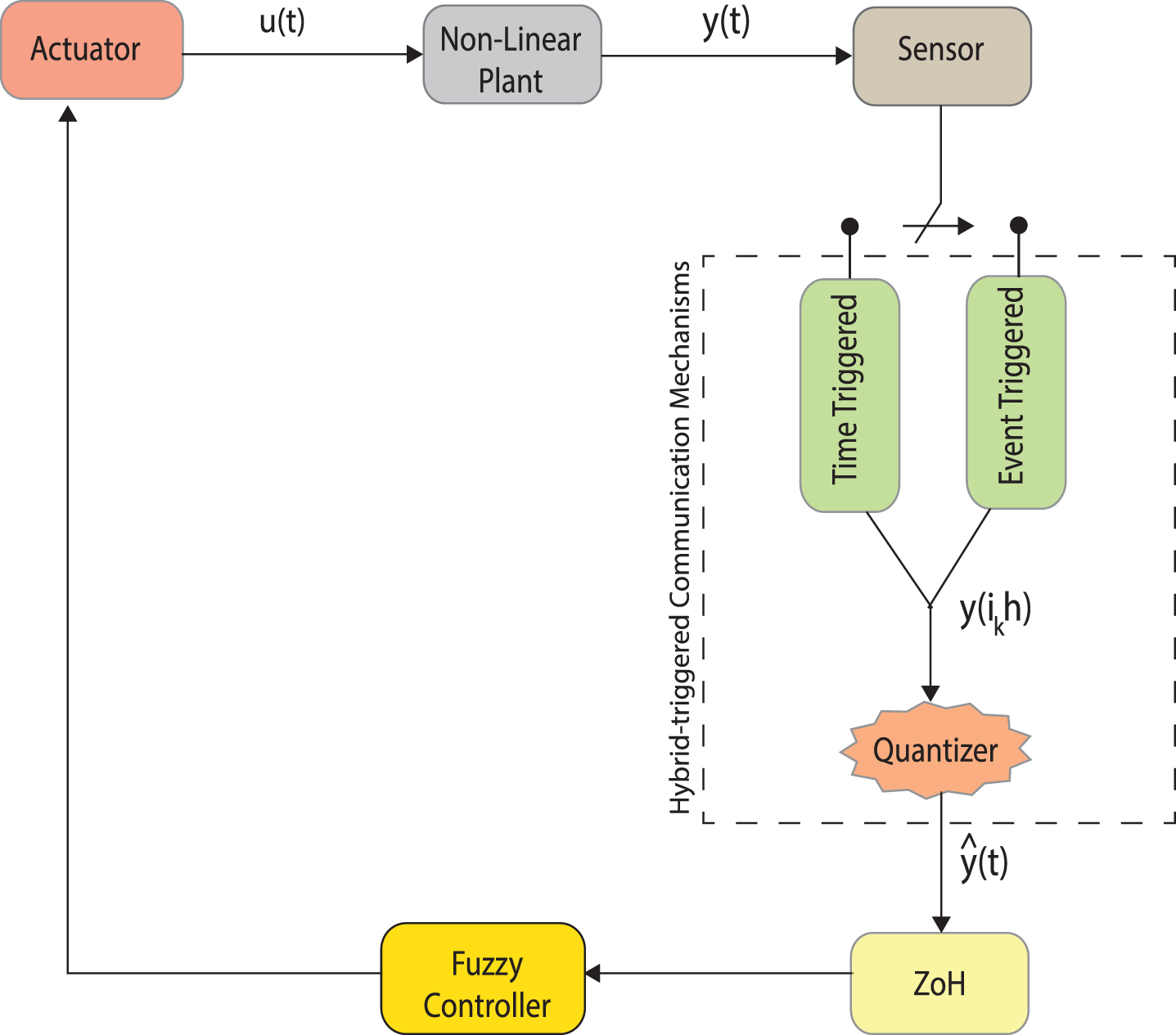
In Fig. 1, we constructed the networked control systems, which contain the continuous T-S fuzzy plant, fuzzy controller with the quantization effect, hybrid-triggered communication mechanism and an actuator. This framework presents a system in which the actuation is cheap for a heavy transmission but transmission of sensor measurements to the controller is expensive. To encounter such a problem in a networked environment, it is compulsory that signal must measure before the transmission from sensor to controller. Main theme of this paper is to eliminate the communication burden as well as to increase the system performance. In the following, we concentrate on designing a hybrid–triggered state feedback H∞ fuzzy controller for Eq. (1) with the following form: Controller Rulei: IF ϑ1 is and...and ϑg is , THEN
where is the controller gain, which is determined to be later. Then the overall fuzzy state feedback controller can be expressed as:
In the next sections, the main mathematical methods of the networked systems are given step by step. In Section 2.1, we considering the stochastic nonlinearities, while hybrid–triggered mechanism presents in Section 2.2 and quantized measurement formulated in Section 2.3.
The structure of hybrid-triggered NCSs with quantization.
Stochastic analysis for nonlinearity
In this paper, we consider the nonlinear perturbation. According to the published literature, researchers only consider the upper bound. In this way, we can say that the nonlinear perturbation fulfills the following inequality:
where H is given known constant matrix with their proper dimensions of g (t, x (t)).
However, due to the random behavior of nonlinear perturbation, the definition of this phenomenon is different according to their limitations. Some researchers defined its upper and lower limits are same (or approximately equal). Then the part of nonlinear perturbation can not be reflected. In order to fully utilize the inner variation information of nonlinear disturbance g (t, x (t)) easily. A similar approach to [40], based upon the g (t, x (t)) is given, we characterize a Bernoulli distribution random variable sequence α (t) with as following:
where G is known as constant matrix which satisfy the condition ∥G ∥ 2 ≤ ∥ H ∥ 2.
Associated values of g (t, x (t)) for small nonlinearity g1 (t, x (t)) and for a huge nonlinearity g2 (t, x (t) can be written as:
Based upon the above definitions in (7) and (8), g (t, x (t)) can be described as:
Before proceeding ahead, it is assumed that in the T-S fuzzy system of NCSs (1), the measured output is transmitted through common network channel.
Hybrid-triggered communication mechanism
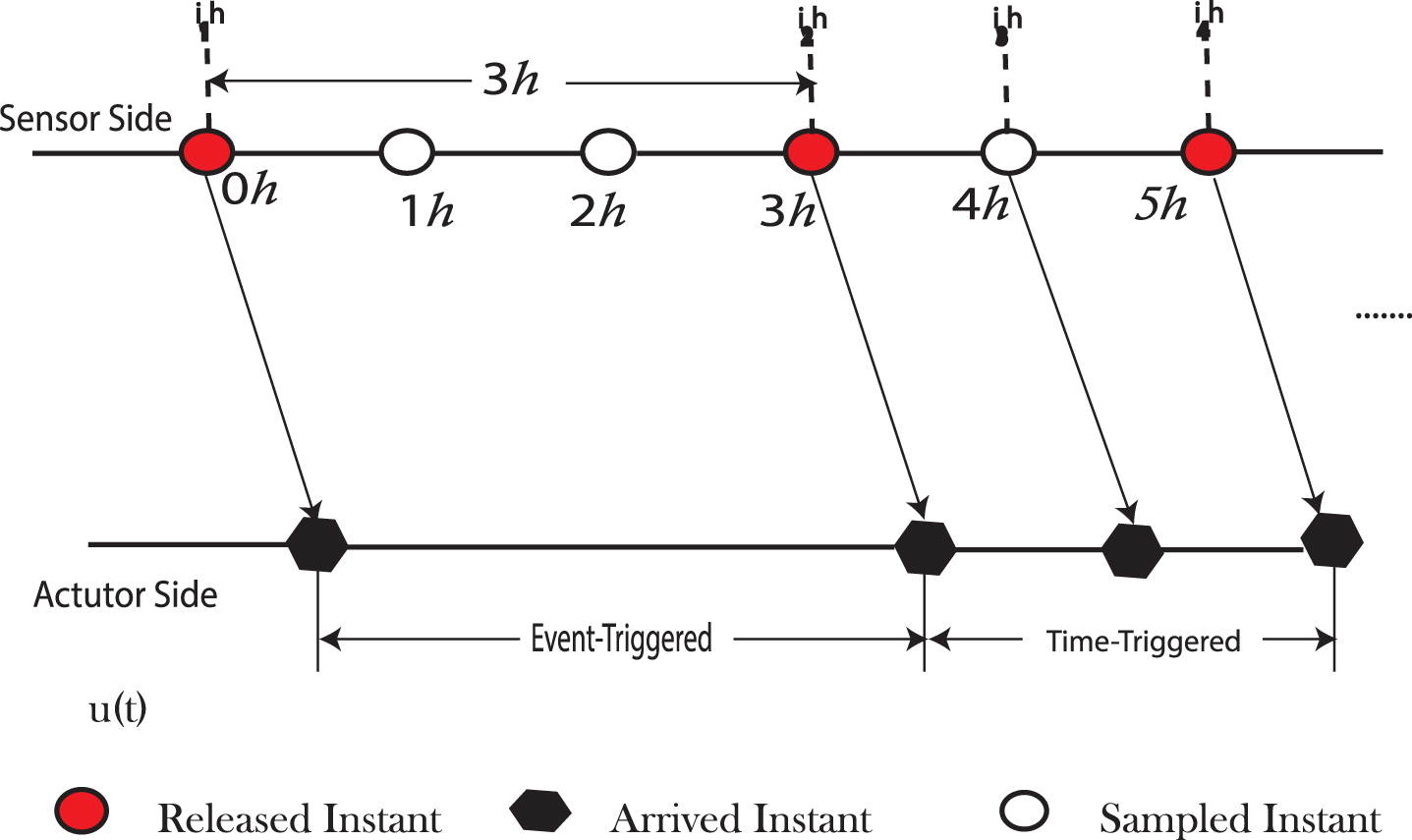
In NCSs, energy constraint is still changeling for the researchers. Before transmission, the local measurements are scheduled according to the need and is one of the solutions to this problem. Event-trigger control problems have been investigated to sent the next transmission execution time for saving sensor data transmission energy in [41]. On the other hand, event-triggered mechanism neglects discards some important data packages, which cause the poor performance of the system. In the cop of efficient bandwidth utilization and increase the system performance, we introduced the co-design method which can be called event-triggered and time-triggered network toggle randomly according to their probability distribution. A descriptive example of discrete co-design method is shown in Fig. 2.
Timing diagram of hybrid-triggered NCSs.
Assumption 1. In the communication network the sensor is time triggered with sampling rate h, and the sampled state is determined by set {0, h, 2h, ·· · , kh, ·· ·}, where k ∈ N. Whereas the controller and actuators are hybrid-triggered. The successful transmitted instants are represented by {0, i1h, i2h, ·· · , ikh, ·· ·}, where k ∈ N.
Assumption 2. The event triggered communication is proposed to be implemented from sensor to controller. The network induced delay is taken into consideration with some upper bound. , where .
Assumption 3. The data packets are to be time stamped and assumed to be transmitted without any packet loss.
In order to explain the behavior of switch effect of co-design method, first we have to introduce a stochastic variable sequence β (t) with Bernoulli distribution, which defined as follows:
The expectation of β (t) can be given as:
The value of 0 ≤ β ≤ 1 is constant.
As we have already discussed in the literature that we are considering a common communication channel for the measured output. Due to the common communication channel, we have a limitation of bandwidth. To deal with this issue an event-triggered communication-based transmitter is inserted between the plant and the controller. In order to enhance the communication performance. In addition, to deciding the transmission of the current measured data y (t) to the observer from the ETC transmitter is based on logic function [25]. Network-induced delays are considered between the sensor and controller in our proposed scheme. The ETC is designed to handle the event generated by the instant (ikh). The current transmitted sampled data is denoted by ikh. The error between the current sampled data and the latest transmitted data can be expressed as:
Where zkh = ikh + mh, and zkh denotes the sampling instant between two simultaneous instants. The future transmission instants are based on ETC scheme which is expressed as follows.
and 0 < ρ < 1 represents the conditions for triggering will be determined later. From the above mentioned conditions, it is clear that the next transmitting instants are experienced by two important aspects. Which are triggering parameters and output y (ikh). From (13) it is seen that the transmitted instant {ikh ∣ ik ∈ N} yielding to sampled instants denoted as { kh ∣ k ∈ N} . i0h = 0 represents the initial transmitting instant. In this paper we consider the network induced transmission delays, dik and dik+1 at transmitting instants ikh and ik+1h respectively. Then ik + dik represents the instant when the transmitted signal arrives at zero-order-holder (ZOH).
It is examined that retains the value of y (ikh) with interval [ikh + dik, ik+1h + dik+1) influenced by ZOH.
The subset used to call the holding zone Ξ of ZOH [25]:
Where Ξp = [ikh + dik, ik+1h + dik+1), p = 0, 1, 2, ·· · , ol, ol = ik+1 - ik - 1.
The network delay could be defined as d (t) = t - ikh, satisfying . Based on above mentioned analysis the original input of the system could be expressed as:
For above summary, we implement the co-design method with two channels (time trigger and event trigger), the output y (ikh) expression can be defined as:
Remark 1. The time-triggered communication scheme be able to be considered as a special illustration of event-triggered communication scheme, therefore the constraint (13) at all times holds owing to ek (t) =0 under time-triggered scheme.
Remark 2. Certainty, the co-design method is a random event-triggered scheme, in which the state output data can choose a channel according to a specified probability. Sometime there is less information to be transmitted. In such environment if we transmit the data through event-triggered scheme, may degrades the network resource management. By considering co-design method in network control systems, efficient utilization of bandwidth could be ensured along with prevention from significant data loss.
Measurement of quantizer
In this paper, due to the appearance of the communication channels between the nonlinear plant and controller. First, we consider the output synthesis using quantized measurement, which received through the communication environment:
In above stands for time-variant quantizer and logarithmic static (mode dependent), which is
The associated quantizer , for the logarithmic quantizer is well-defined as below:
where with
ρfs is a given constant, which is called the quantization density. It follows from (20)-(21) that
The quantized output of the system is also affected by the communication delay, which is considered in the general form of controller design. That’s why our approach is more standard than the existing one in [42]. Based on the above analysis (18)-(22) and using the Sector Bound Approach (SBA) [43, 44], the measured output received by the delayed controller can be expressed as:
where with definition of .
If , then g (x) =0, which yields no quantization in NCSs.
Then, integrate the (17) and (23), our measurement fuzzy control input becomes:
Then, using fuzzy control input (24) in (1), the closed loop form can be obtained as:
Therefore, the above-mentioned system (25) holds some kind of stochastic variables. This stochastic term actually presents the parametric in system. In order to formulate this problem, ones give the concept of stochastic stability in the sense of mean-square:
Definition 1. [45] The system (25) is said to be stochastically mean-square stable, if there exist the real constants λ > 0 and ζ > 0, for t > 0, the following inequality holds:
where φ (s) is known as continuous vector-valued function with initial conditions [-dM, dm], which fulfills initial state of the system (1).
According to this Definition, we are able to design the fuzzy controller design (4) under the networked control system such that following two properties are fulfilled simultaneously for the closed-loop system (25).
Firstly, A closed-loop system (25) is stochastically stable in the sense of mean-square.
Second, with the zero-initial conditions, controlled output y (t) satisfies.
Before going to the main Theorem of this paper, first, we have to introduce some lemmas which help to derive the main result.
Lemma 1. [46] Assume d (t) ∈ [0, dM] and g1, g2 and ℧ are matrices with proper dimension, then:if and only if
Main results
The arrangement of this part is as follows. In Section 3.1, a process of establishing the state feedback fuzzy controller (4) is developed such that the closed loop system (25) is stochastically stable. Then, the fuzzy controller design for two special cases is discussed in Section 4.
Theorem 1.For the given scalars which satisfying dm < d (t) < dM, α, β and γ > 0, augmented system (25) is stochastically stable with the H∞ performance index under co-design method with quantization, if there exist matrices P > 0, Qℓ > 0, Rℓ > 0, , , and , ℓ = 1, 2, such that the following inequalities holdwhere
Proof. First, we implement the Lyapunov-Krasovskii function candidate for system (25)
where
P > 0, Qℓ > 0, Rℓ > 0 (ℓ =1, 2). Then, by implementing similar techniques to those in [53], we have to expectation for each Vp (t) (p = 1, 2, 3)
Taking the expectation of (25), we can get:
Now, characterize the augmented matrix
So, rewrite the eq. (33) as:
According to the (34):
where
Integrating the (30)–(35) with introducing the slack matrices under H∞ control performance index, we get:
where
At that point, we use the definition in (7) and (8)
Recalling the triggering condition (6), t ∈ [ikh + dik, ik+1h + dik+1) we have:
which is equivalent to
Recalling the Lemma of [46], which satisfy the following inequalities
Further more:
Combing the (36)–(43):
By implementing the well–known Schur complement with Lemma 1 of [46], one can easily attained:
According to the zero-initial condition with integrate the (45) from 0 → t, and let t→ ∞, we can easily get:
which yields
It is well known, the remaining part of the proof is similar to those in [48, 49] and here, we omitted for avoid the complication.
Now, we are going to prove the stochastically stability of the system (25), with condition ω (t) =0. For this, first we have to define new function:
Taking the derivative
From the above equation, we can conclude that:
We can see that there exit a positive number ɛ, for such that t ≥ 0
Therefore, V (t) ≥ λmin (P) xT (t) x (t), for t ≥ 0, the equality appeared in above can be shown as:
where definition of . So from the Definition 1, the system (25) is stochastically stable. The proof is complete. □
Remark 3. Sufficient condition is derived in Theorem 1. It is worth mentioning that in inequalities, there is some nonlinear term like from Eq. (28) and we cannot be handled these LMIs directly. For this, we have to use some common method to tackle the . Based upon Theorem 1, the next theorem will proceed.
For system (25) the main results for the solvability of T-S fuzzy based controller is presented as bellows:
Theorem 2. For the given scalars which satisfying dm < d (t) < dM, α, β and γ > 0, augmented system (25) is stochastically stable with the H∞ performance index under co-design method with quantization, if there exist matrices P > 0, Qℓ > 0, Rℓ > 0, , , and , ℓ=1, 2, and ɛ > 0 such that the following inequalities hold
where mostly parameters are same like , , , ϒ, (1, 1), (8, 1), (8, 8) etc. as mentioned in Theorem 1. Note:(We also mentioned change parameters in this theorem.)
Proof. The matrix appeared in Eq. (28) can be redraft as:
Using Lemma 3 of [47], for any ɛ > 0. Then the following inequalities can be attained
Therefore, in is a diagonal matrix, which means . Suppose , then proceeding inequalities can easily get:
Apply the schur complement and integrating the Eq. (28), (54) and (55), the LMIs of Eq. (52) can be obtained. The proof is complete. □
Fuzzy controller designing for co-design method
The following result can be accomplished according to Theorem 1 & 2 for the hybrid-triggered communication mechanism for the fuzzy feedback control design of closed-loop system (25). However, for the computational complexity, we select some common LMIs method.
Theorem 3.For the given scalars which satisfying dm < d (t) < dM, α, β and γ > 0, augmented system (25) is stochastically stable with the H∞ performance index under co-design method with quantization, if there exist matrices , , , , , , , , and , i = 1, 2 with scalar ν > 0 such that the following inequalities hold for s = I, II. In this case, our reliable controller in the form of (4) is given by , wherewhere
Proof. Define: , . By post and pre multiplication of and its transpose to (52), which yields to (56). At this stage, now we define new matrices: , , , , i = 1, 2, ν = ɛ-1, , , and . When the LMIs in (56) is feasible for the closed-loop system (25), then our system is stochastically stable with H∞ performance index. Proof completed. □
Remark 4. In Theorem 3, sufficient conditions are derived which guarantee a stochastically stable closed–loop system to be in the means–square with a certain performance index γ. The solvability of LMIs (56) results in the gain matrix of hybrid-triggered controller design problem. So it becomes a convex optimization problem whose solution results in the optimal performance index γ.
Special cases
In this segment, we will provide the following outcomes into two special scenarios for comparison:
Case-A: If β (t) =0, our system (25) becomes a special case for time-triggered mechanism, which can be written as:
Corollary 1.For the given scalars which satisfying dm < d (t) < dM, α, σ > 0 and γ > 0, augmented system (25) is stochastically stable with the H∞ performance index and fuzzy feedback control gain , if there exist matrices , , , , , , , and , i = 1, 2 with scalar ν > 0 such that the following inequalities hold for s = I, II. wherewhereRemaining terms are same as mentioned in Theorem 3.
Case-B: If β (t) =1, our system (25) becomes a special case for event-triggered mechanism, which can be written as:
Corollary 2.For the given scalars which satisfying dm < d (t) < dM, α, σ > 0 and γ > 0, augmented system (25) is stochastically stable with the H∞ performance index and fuzzy feedback control gain , if there exist matrices , , , , , , , , and , i = 1, 2 with scalar ν > 0 such that the following inequalities hold for s = I, II. where
where
Remaining term are same as mentioned in Theorem 3.
Remark 5. It is noted that the conditions obtained in Theorem 3 are presented in terms of linear matrix inequalities, which can be checked easily by the LMI toolbox of MATLAB.
Remark 6. From the above analysis, it is evident that the frequency of the data transmission is determined by two factors; one is the triggering parameter in Eq. (13). In order to send more data the value of in (13) should be lesser which is easily attained. The other factor is β, which decides the switch rule of time trigger and event trigger. Apparently, the smaller β will result in greater probability of data packets to be transmitted by time trigger generator. Then the co-design method cannot decrease the network transmission load efficiently. Thus, in order to enhance the system performance and transmission efficiency concurrently, the values of β should be chosen slightly larger.
Simulation examples
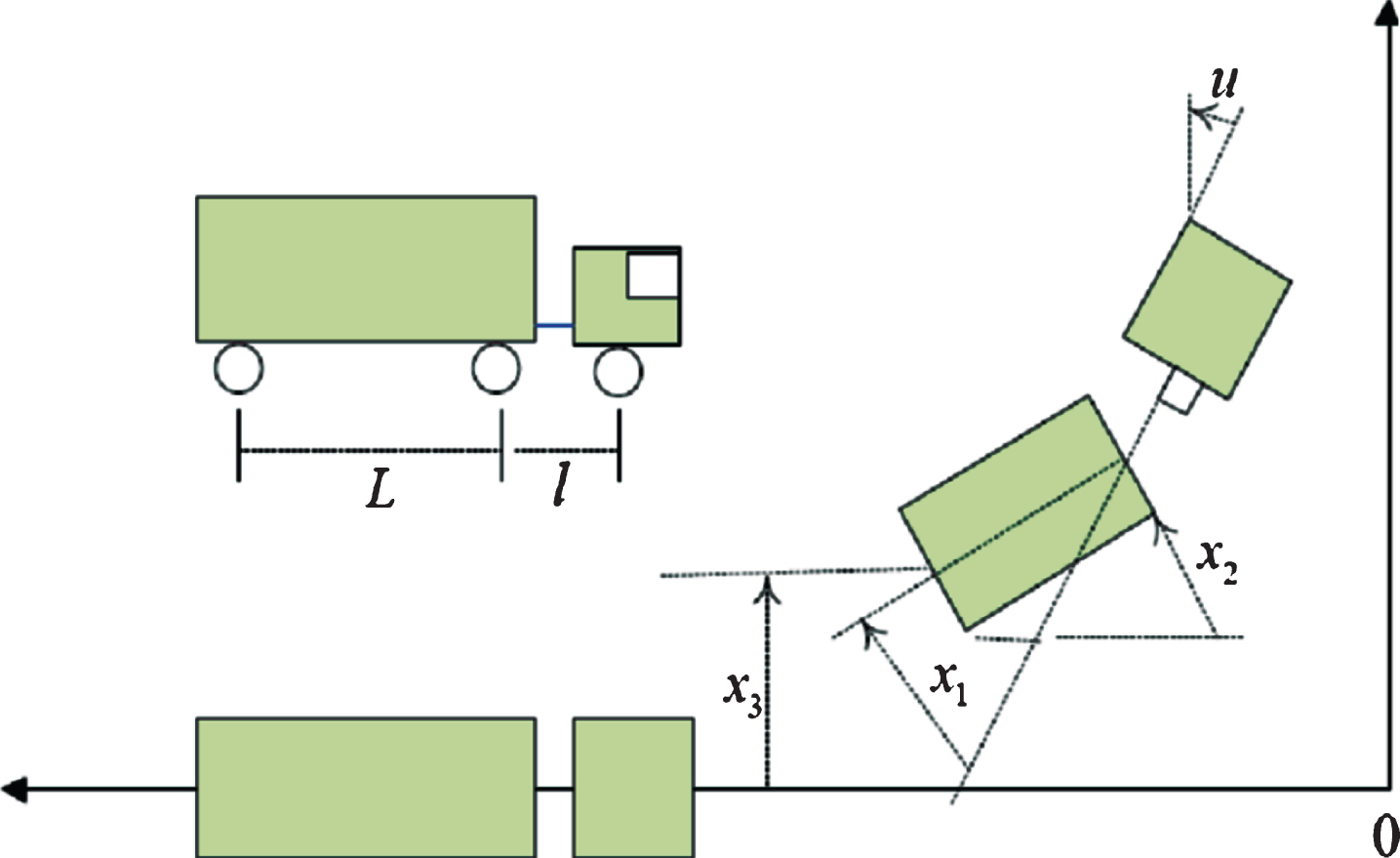
In this section, we provide the most motivated practical example of truck-trailer with hybrid-communication strategy. To illustrate the effectiveness of proposed a method for hybrid-transmission scheme, the backing-up control of a truck-trailer system [50] is used in this section. The truck-trailer model is given as:
with the state region , where x1 (t) is the angle difference between truck and trailer, (rad); x2 (t) is the angle of trailer relative to the horizontal position, (rad); x3 (t) is the vertical position of rear end of trailer, (m); u (t) is the steering angle, (rad); l is the length of truck, L is the length of trailer, t0 is sampling time, is the time, and v is the constant speed of backing up, in which , t0 = 0.5s, l = 2.8m, L = 5.5m, and v = -1.0m/s.
Define . The dynamics of the truck-trailer system are presented in Fig. 3. Then the truck-trailer system can be transferred as the following T–S model.
Structure of Truck-Trailer system.
IF ϑ (t) is 0, Then
IF ϑ (t) is ±π, Then
where , and
where . Define the system’s membership functions as:
In the simulation, we choose the initial condition , the external disturbance is:
And nonlinear function is expressed as:
First we define the limitation of upper bound and lower bound of g (x, x (t)), according to the Eq. (19), which can be chosen H = diag {0.4, 0.6, 0.8} and G = diag {0.2, 0.3, 0.4}, respectively. Now we introduced the communication delay (dm, dM) = (0.35, 0.85) and (h, ν) = (100 ms, 0.15). After this, we set the quantization density is 0.5.
Now we are going to discuss three different scenarios. In this discussion, we show the impact of co-design method for a networked control system.
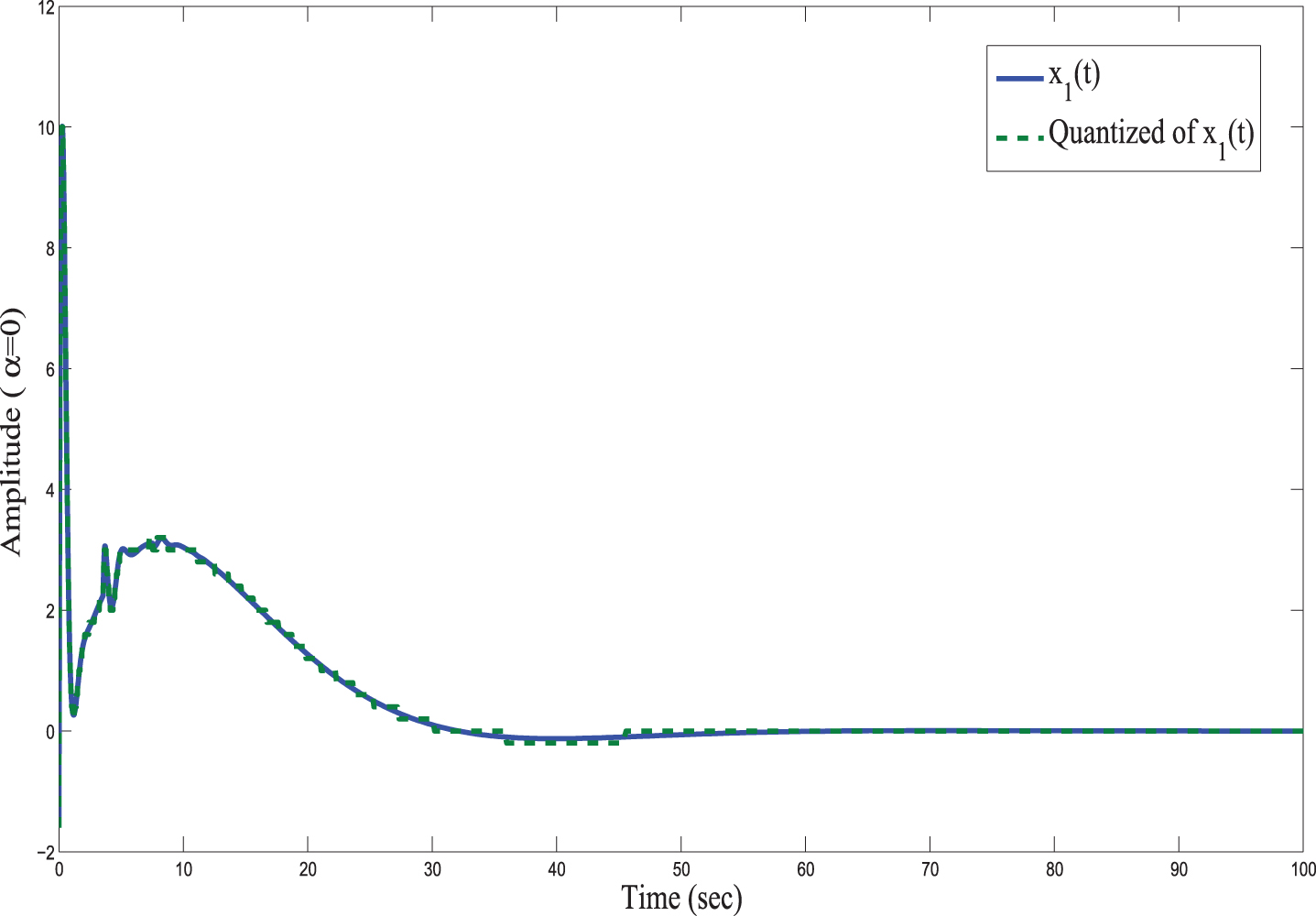
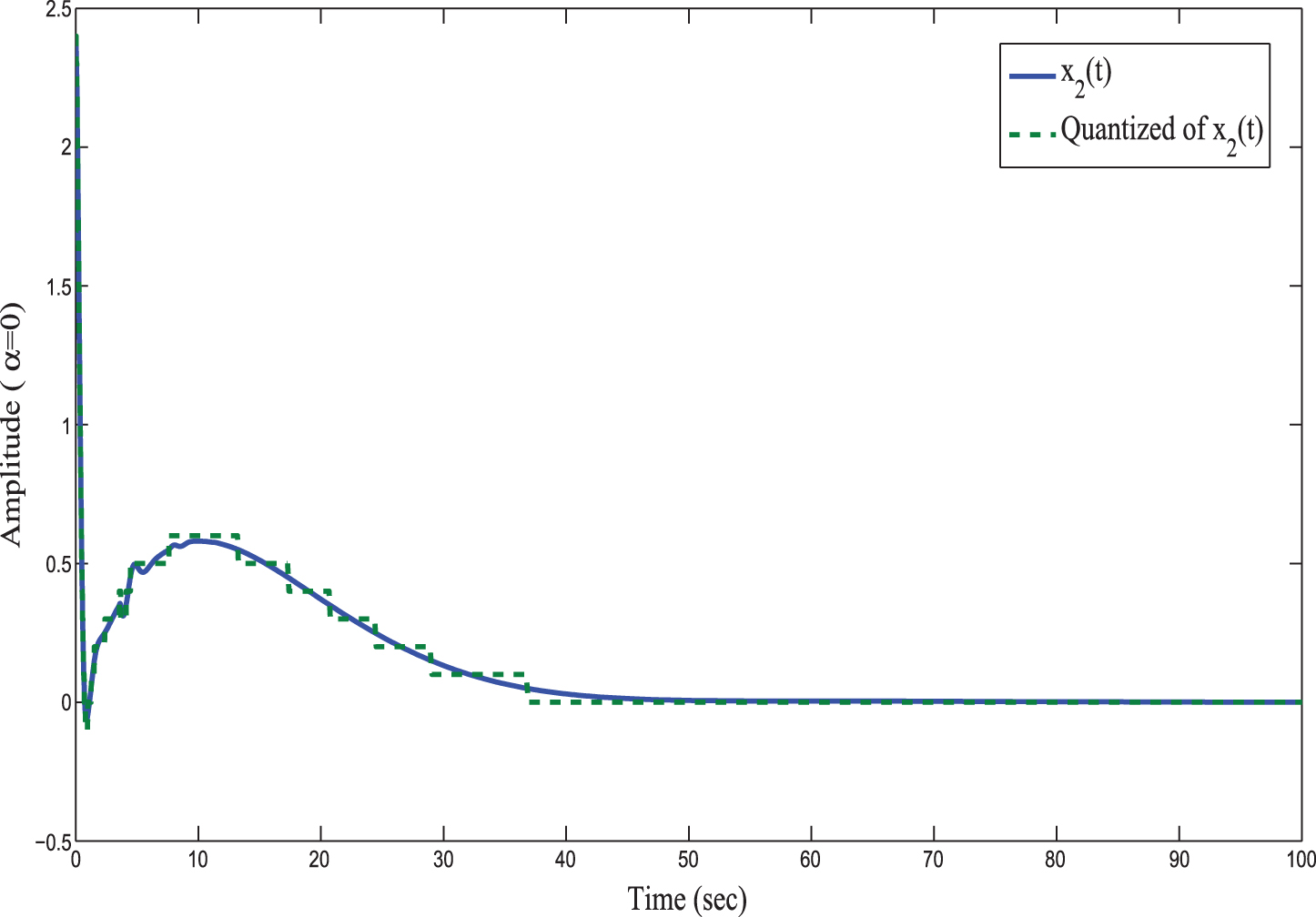
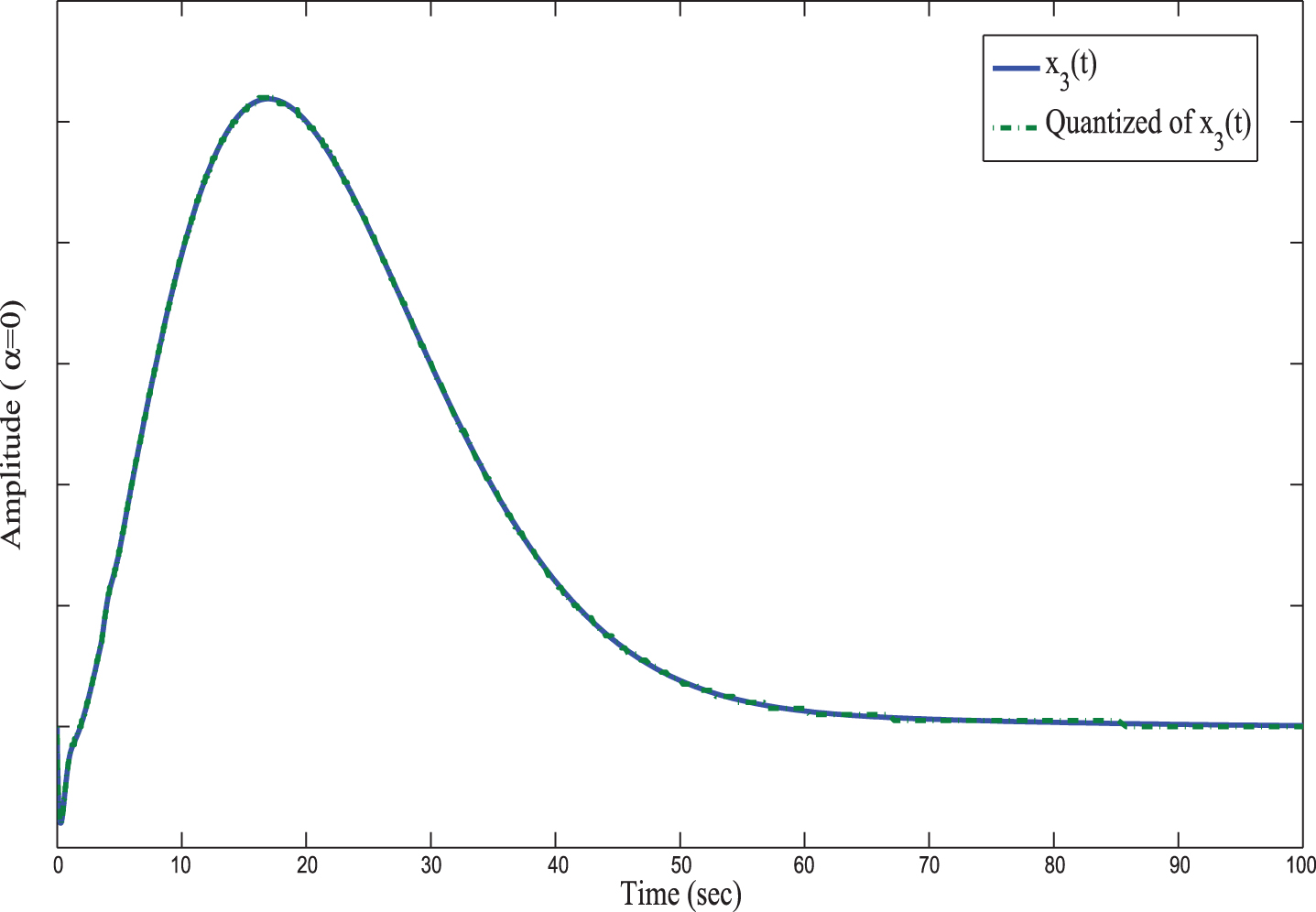
Scenario-I: Suppose β (t) =0, then co-design method yields to the time–triggered mechanism, where γ = 0.75. Then, it is observed that the LMI of Corollary 1 is feasible and fuzzy feedback controller gains are:
Then, the simulation results are provided in Figures 4–6. In Figure 4,5 & 6, the state responses with the quantization effect of the closed-loop networked control system (57) with fuzzy controller gains (66) are simulated, from which exhibits that the closed-loop system is stochastically stable. Figure 7 shows the behaviour of the control law.
Difference between the angle of truck and trailer.
Difference between the angle of truck and trailer.
Difference between the angle of truck and trailer.
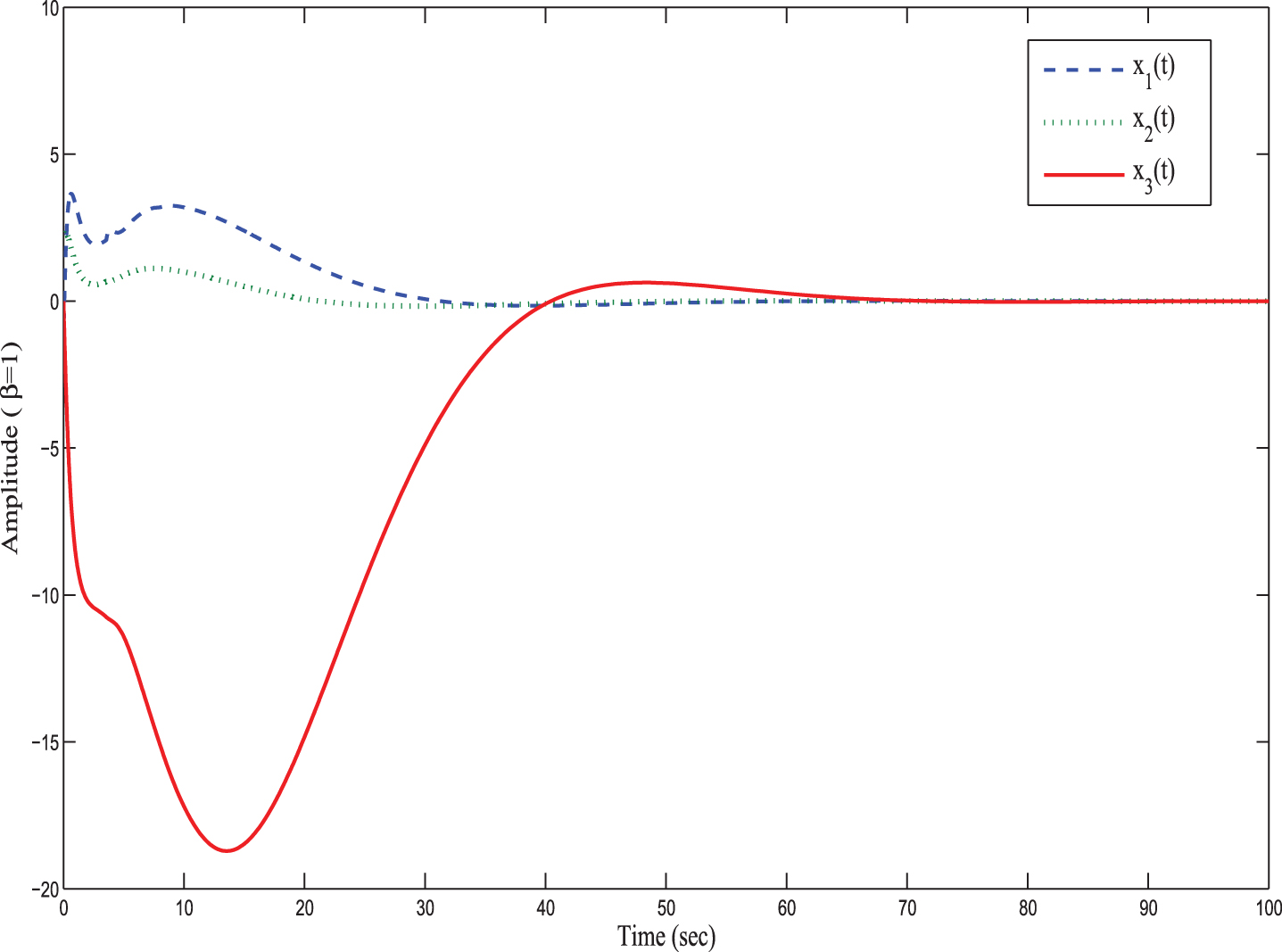
Scenario-II: Suppose β (t) = {0, 1}, then our scheme becomes co-design method, where β = 0.75, σ = 0.25 and γ = 0.75. Then, it is observed that the LMI of Theorem 3 is feasible, with associate event-triggered parameter and fuzzy feedback controller gains are:
In this case, we are going to make a fair comparison with the same initial conditions ad mentioned for scenario-I, then system state output signals should be determined under co-design method by two different networks associated with their probability distribution. In Figure 8, state behavior of closed-loop system (25) with (67) under co-design method, while in Figure 9, quantized output of the system is presented. The switching mode sequence is plotted in Figure 10, according to their probability distribution as mentioned in Eq. (10). In Eq. (10), 1 represents the event-triggered and 0 shows time–triggered, respectively. Figure 11 shows the event-triggered and time-triggered release instants and release intervals. To show the effectiveness of our proposed method, we make a comparison for the maximum allowable delay bound dM = 1.392 which is larger than that of [24] as summarized in Table 1. Hence, Table 1 confirms that Theorem 3 provides less conservative results than conventional approaches. From the above-mentioned figures, one can easily be seen that the proposed co-design method method can eliminate a load of communication bandwidth over the network. These simulation results clearly demonstrate that the co-design method design scheme developed in this paper is effective.
Trajectories of states with quantization for Scenario-II.
Quantization output for Scenario-II.
Switching Scheme for Scenario-II.
The release instants and intervals of α (t) =0.75 for Scenario-II.
Hybrid-trigger times with different β
β
0
0.75
1
Time-trigger times
1000
112
0
Event-trigger times
0
41
85
Total trigger times
1000
153
85
Average release period
0.100
0.394
0.812
Data transmission
100%
21.67%
6.59%
Scenario-III: Suppose β (t) =1, then co-design method yields to the event–triggered mechanism, where γ = 0.75. Then, it is observed that the LMI of Corollary 2 is feasible, with associate event-triggered parameter and fuzzy feedback controller gains are:
Considering the same initial conditions as in scenario-II, the system state responses are shown in Figure 12, we can see that the closed-loop networked control system (59) is still stable. Under the sole event-triggered mechanism, the release instants and release intervals are shown in Figure 13.
State behaviour of truck-trailer for Scenario-III.
The release instants and intervals for Scenario-III.
In the next, we are concerned to identify the relationship between the optimal performance index γ with the parameter β. It is worth mentioning that the obtained optimal performance index γ* will vary as the values of β. In Table 1, the associated optimal performance γ* of the above three cases are given. From the calculation of Table 1, we concluded that small values of β yields to small γ*, which means that the event-triggered mechanism can affect the performance in some context.
In addition, we make a comparison of the difference of trigger times for every case. In Table 3, we present the relation of the parameter β with event-trigger times, time-trigger times, percentage of data transmissions and the average release period. From the above analysis, one can easily conclude that the proposed co-design method methodology for networked control system with appearing the random behavior of nonlinearities under the quantization effect is practicable. On the other side, the effectiveness of this proposed algorithm in the sense of eliminating the burden of communication while keep improving the system performance. Furthermore, our algorithm can become an important application for the communication sector and radar technology.
Conclusions
The issue of the state feedback H∞ control problem for T-S fuzzy system has been investigated under stochastic nonlinearity for hybrid-triggered NCSs in this paper. It is should be noted that the hybrid time-event-triggered scheme is employed in order to save the bandwidth resource with measurement size-reduction scheme. In a unified frame work, co-design method based model with quantization and stochastic nonlinearity is proposed. The presented scheme provides a sufficient condition to guarantees the resulting system is stochastically stable with H∞ performance index. The Fuzzy controller gains can be obtained by solving the linear matrix inequalities. In our proposed algorithm, we have poor computation complexity. Simulations are performed to validate the proposed scheme.
Based on the related work and research in [51, 52], how to propose the distributed hybrid triggered transmission mechanism, and discuss the decentralized fuzzy control problem for networked control systems is also a challenging area. In addition, it is worth to mention that the scheme developed in this paper can be extended to other dynamic systems, such as neural networks and sampled-data systems with time-varying delays, which will be our future research. Furthermore, the proposed method will be extended to more general MASs with actuator saturation [54] or switching topologies [55].
References
1.
TakagiT. and SugenoM., Fuzzy identification of systems and its applications to modeling and control, IEEE Transactions on Systems, Man, and Cybernetics15(1) (1985), 116–132.
2.
SadeghiM.S. and VafamandN., More relaxed stability conditions for fuzzy T–S control systems by optimal determination of membership function information, Journal of Control Engineering and Applied Informatics16(2) (2014), 67–77.
3.
VafamandN., KhoobanM.H., DragicevicT., BlaabjergF. and BoudjadarJ., Robust non–fragile fuzzy control of uncertain DC microgrids feeding constant power loads, IEEE Transactions on Power Electronics34(11) (2019), 11300–11308.
4.
VafamandN. and RakhshanM., Dynamic model–based fuzzy controller for maximum power point tracking of photovoltaic systems: A linear matrix inequality approach, Journal of Dynamic Systems, Measurement, and Control139(5), 2017.
5.
MoodiH. and FarrokhiM., On observer–based controller design for Sugeno systems with unmeasurable premise variables, ISA transactions53(2) (2014), 305–316.
6.
XieW.B., LiH., WangZ.H. and ZhangJ., Observer–based controller design for A T–S fuzzy system with unknown premise variables, International Journal of Control, Automation and Systems17(4) (2019), 907–915.
7.
Wang, Jimin, MaShuping and ZhangChenghui, Finite-time H∞ control for T–S fuzzy descriptor semi–Markov jump systems via static output feedback, Fuzzy Sets and Systems365 (2019), 60–80.
8.
NguyenV.A., NguyenA.T., DequidtA., VermeirenL. and DambrineM., Nonlinear tracking control with reduced complexity of serial robots: A robust fuzzy descriptor approach, International Journal of Fuzzy Systems21(4) (2019), 1038–1050.
9.
LiuJ., WangY., ZhaL. and YanH., Event-based control for networked T-S fuzzy cascade control systems with quantization and cyber attacks, Journal of the Franklin Institute, DOI: 10.1016/j.jfranklin.2019.09.006, 2019.
10.
JiX. and WangY., Quantized control for nonhomogeneous Markovian jump T–S fuzzy systems with missing measurements, Peer-to-Peer Networking and Applications, DOI:10.1007/s12083-019-00778-4, 2019.
11.
VafamandN., AsemaniM.H. and KhayatianA., Robust L1 observer–based non-PDC controller design for persistent bounded disturbed T–S fuzzy systems, IEEE Transactions on Fuzzy Systems26(3) (2017), 1401–1413.
12.
VafamandN., KhorshidiS. and KhayatianA., Secure communication for non-ideal channel via robust T–S fuzzy observer–based hyperchaotic synchronization, Chaos, Solitons & Fractals112 (2018), 116–124.
13.
LiF., ShiP., WuL., BasinM.V. and LimC.C., Quantized control design for cognitive radio networks modeled as nonlinear semi Markovian jump systems, IEEE Transactions on Industrial Electronics62(4) (2015), 2330–2340.
14.
LiH., WuC., JingX. and WuL., Fuzzy tracking control for nonlinear networked systems, IEEE Transactions on Cybernitics47(8) (2017), 2020–2031.
15.
BasinM.V. and Rodriguez-RamirezP.C., Sliding mode controller design for stochastic polynomial systems with unmeasured states, IEEE Transactions on Industrial Electronics61(1) (2014), 387–396.
16.
LiH., JingX. and KarimiH., Output–feedback–based H∞ control for vehicle suspension systems with control delay, IEEE Transactions on Industrial Electronics61(1) (2014), 436–446.
17.
YuJ., LiuM., YangW., ShiP. and TongS., Robust fault detection for Markovian jump systems with unreliable communication links, International Journal of Systen Science44(11) (2013), 2015–2026.
18.
HamdyM., Abd–ElhaleemS. and FkirinM.A., Time-varying delay compensation for a class of nonlinear control systems over NETWORK via H∞ adaptive fuzzy controller, IEEE Transactions on Systems, Man, and Cybernetics: Systems47(8) (2016), 2114–2124.
19.
YousefH.A., HamdyM. and NashedK., L1 adaptive fuzzy controller for a class of nonlinear systems with unknown backlash–like hysteresis, International Journal of Systems Science48(12) (2017), 2522–2533.
20.
YousefH.A., HamdyM., SaleemA., NashedK., MesbahM. and ShafiqM., Enhanced adaptive control for a benchmark piezoelectric-actuated system via fuzzy approximation, International Journal of Adaptive Control and Signal Processing33(9) (2019), 1329–1343.
21.
ZhangH.G., WangZ.S. and LiuD.R., A comprehensive review of stability analysis of continuous-time recurrent neural networks, IEEE Transactions on Neural Networks on Learning Systems25(7) (2014), 1229–1262.
22.
TongS.C., WangT., LiY.M. and ZhangH.G., Adaptive neural network output feedback control for stochastic nonlinear systems with unknown dead-zone and unmodeled dynamics, IEEE Transactions on Cybernetice44(6) (2014), 910–921.
23.
TianE.G. and YueD., Reliable H∞ filter design for T-S fuzzy modelbased networked control systems with random sensor failure, International Journal of Robust Nonlinear Control23(1) (2013), 15–32.
24.
WangY., ZhangH., WangX. and YangD., Networked synchronization control of coupled dynamic networks with time–varying delay, IEEE Transactions on Systems, Man, Cybernetics40(6) (2010), 1468–1479.
25.
PengC. and YangT.C., Event–triggered communication and H∞ control co–design for networked control systems, Automatica49(5) (2013), 1326–1332.
26.
PengC., MaS. and XieX., Observer–based Non-PDC control for networked T–S fuzzy systems with an event-triggered communication, IEEE Transactions on Cybernetics47(8) (2017), 2279–2287.
27.
GassaraH., HajjajiA.E., KchaouM. and ChaabaneM., Robust Hinfinity reliable control of time delay nonlinear systems via takagi–sugeno fuzzy models, International Journal of System Science45(3) (2014), 667–681.
28.
KchaouM., ToumiA. and SouissiM., Robust reliable guaranteed cost piecewise fuzzy control for discrete-time nonlinear systems with time-varying delay and actuator failures, International Journal of System Science40(5) (2011), 531–558.
XiaY., FuM. and ShiP., Analysis and Synthesis of Dynamical Systems with Time-Delays. Springer, Berlin (2009)
31.
ZengaH.B., TeobK.L., HecY. and WangaW., Sampled–data-based dissipative control of T–S fuzzy systems, Applied Mathematical Modelling65 (2019), 415–427.
32.
AbdurahmanA., JiangH. and TengZ., Finite–time synchronization for fuzzy cellular neural networks with time–varying delays, Fuzzy Sets and Systems297 (2016), 96–111.
33.
FengZ., LamJ. and GaoH., A-dissipativity analysis of singular time-delay systems, Automatica47 (2011), 2548–2552.
34.
KchaouM., SouissiM. and ToumiA., Delay–dependent stability and robust L2 - L∞ control for a class of fuzzy descriptor systems with time-vary ing delay, International Journal of Robust and Nonlinear Control23(3) (2013), 284–304.
35.
ZhangJ., PengC., DuD. and ZhengM., Adaptive event–triggered communication scheme for networked control systems with randomly occurring nonlinearities and uncertainties, Neurocomputing174 (2016), 475–482.
36.
GuZ., ShiP. and YueD., An adaptive event–triggering scheme for networked interconnected control system with stochastic uncertainty, International Journal of Robust and Nonlinear Control27(2) (2017), 236–251.
37.
WangY., SongG., ZhaoJ., SunJ. and ZhuangG., Reliable mixed H∞ and passive control for networked control systems under adaptive event-triggered scheme with actuator faults and randomly occurring nonlinear perturbations, ISA transactions89 (2019), 45–57.
38.
PengC., YangM., ZhangJ., FeiM. and HuS., Network–based H∞ control for T-S fuzzy systems with an adaptive event–triggered communication scheme, Fuzzy Sets and systems329 (2016), 61–76. j.fss.2016.12.011
39.
GnaneswaranN. and JooY.H., Event–triggered stabilisation for T-S fuzzy systems with asynchronous premise constraints and its application to wind turbine system, IET Control Theory & Applications13(10) (2019), 1532–1542.
40.
TianE. and YueD., Decentralized control of network-based interconnected systems: a state-dependent triggering method, International Journal of Robust Nonlinear Control25(8) (2015), 1126–1144.
41.
YueD., TianE. and HanQ., A delay system method for designing event–triggered controllers of networked control systems, IEEE Transactions on Automic Control58(2) (2013), 475–481.
42.
Wei, Yanling, et al., Model reduction for continuous–time Markovian jump systems with incomplete statistics of mode information, International Journal of System Science45(7) (2014), 1496–1507.
43.
Abdi, Younes and RistaniemiTapani, Joint local quantization and linear cooperation in spectrum sensing for cognitive radio networks, IEEE Trans. Signal Process62(17) (2014), 4349–4362.
44.
Fu, Minyue and XieLihua, The sector bound approach to quantized feedback control, IEEE Transactions on Automatic control55(11) (2005), 1698–1711.
45.
MaoX., Robustness of exponential stability of stochastic differential delay equations, IEEE Transactions on Automatic Control41(3) (1996), 442–447.
46.
AslamM.S. and ChenZ., Event–triggered reliable dissipative filtering for the delay nonlinear systemunder networked systems with the sensor fault, International Journal of Control pp. 1–15, 2018. DOI:10.1080/00207179.2018.1484172
47.
SakthivelR., ShiP., ArunkumarA. and MathiyalaganK., Robust reliable H∞ control for fuzzy systems with random delays and linear fractional uncertainties, Fuzzy Sets and Systems302 (2016), 65–81.
48.
LiuJ., FeiS., TianE. and GuZ., Co–design of event generator and filtering for a class of T–S fuzzy systems with stochastic sensor faults, Fuzzy Sets and Systems273 (2015), 124–140.
49.
TianE. and YueD., Reliable H∞ filter design for T–S fuzzy model–based networked control systems with random sensor failure, International Journal of Robust and Nonlinear Control23(1) (2013), 15–32.
50.
PengC., MaS. and XieX., Observer–based non–PDC control for networked T–S fuzzy systems with an event–triggered communication, IEEE Transactions on Cybernetics47(8) (2017), 2279–2287.
51.
LiuJ., TianE., XieX. and LinH., Distributed event–triggered control for networked control systems with stochastic cyber–attacks, Journal of the Franklin Institute, DOI: 10.1016/j.jfranklin.2018.01.048, 2018.
52.
LiuJ., WeiL., XieX. and YueD., Distributed event–triggered state estimators design for sensor networked systems with deception attacks, IET Control Theory & Applications, DOI: 10.1049/iet-cta.2018.58682018.
53.
AslamM.S. and LiQ., Quantized dissipative filter design for Markovian switch T–S fuzzy systems with time–varying delays, Soft Computing, pp. 1–17, 2019.
54.
SakthivelR., ParivallalA., KaviarasanB., LeeH. and LimY., Finite-time consensus of Markov jumping multi-agent systems with timevarying actuator faults and input saturation, ISA Transactions83 (2018), 89–99.
55.
DongX. and HuG., Time–varying formation control for general linear multi–agent systems with switching directed topologies, Automatica73 (2016), 47–55.