
Abstract
Despite its low computational cost, and steady state behavior, some well known drawbacks of the least means squares (LMS) algorithm are: slow rate of convergence and unstable behaviour for ill conditioned autocorrelation matrices of input signals. Several modified algorithms have been presented with better convergence speed, however most of these algorithms are expensive in terms of computational cost and time, and sometimes deviate from optimal Wiener solution that results in a biased solution of online estimation problem. In this paper, the inverse Cholesky factor of the input autocorrelation matrix is optimized to pre-whiten input signals and improve the robustness of the LMS algorithm. Furthermore, in order to have an unbiased solution, mean squares deviation (MSD) is minimized by improving convergence in misalignment. This is done by regularizing step-size adaptively in each iteration that helps in developing a highly efficient optimal preconditioned regularized LMS (OPRLMS) algorithm with adaptive step-size. Comparison of OPRLMS algorithm with other LMS based algorithms is given for unknown system identification and noise cancelation from ECG signal, that results in preference of the proposed algorithm over the other variants of LMS algorithm.
Introduction
The least mean squares (LMS) algorithm is an iterative solver of the online estimation problem that adaptively minimises the mean squares error (MSE) to generate a steady state solution of the problem. The conventional LMS algorithm can not perform well under high eigenvalue spread (condition number) of input signal’s autocorrelation [1, 2]. A stylish collection of preconditioned LMS algorithms is realized by Newton’s method that offers fast convergence speed, but at high computational cost [3–5]. However, recent studies have shown that these algorithms may have poor misalignment hence exhibiting deviation from optimal solution [6]. Variable step-size methods offer a good remedy for unbiased solution of LMS algorithm [7], but such methods may slowdown the convergence speed of the algorithm [8].
Deterministic approach, on the other hand, offers direct methods for least squares (LS) solution of the problem. The recursive least-squares (RLS) algorithms have fast deterministic methods, however, this family of algorithms have numerical instabilities and high computational cost [9]. The problems related to numerical instability are overcome by QRD-RLS based techniques, which employ stable orthogonalization tools of numerical linear algebra in finding the Cholesky factor or inverse Cholesky factor of the input data correlation matrix, and use it to obtain a direct solution of the adaptive filtering problem [10, 11]. A noticeable thing in these direct methods is the toeplitz structure of the input signal’s correlation matrix, that can be optimized to regularize the LMS algorithm. Regularization methods play an important role in improving the performance of iterative solvers of inverse problem [12]. Recently, S. Cipolla et. al. [13] have shown that regularized preconditioner for toeplitz matrices can be optimized at a very low cost. In this paper, the inverse QRD-RLS technique is optimized for known statistics of input signals to design a regularization matrix for improving the characteristics of the input signals. The toeplitz structure of the input signal’s correlation matrix that provides an ease in regularizing preconditioned LMS algorithms optimally. The input tap-vector is regularized by the optimal inverse Cholesky factor of the autocorrelation matrix of a stationary stochastic process, like autoregressive (AR) process. The regularized input signals have low eigenvalue spread that guaranty the fast convergence of the proposed method with nominal additional computational complexity. Furthermore, since the regularization matrix is optimized from the inverse Cholesky factor, the proposed optimal regularized LMS (OPRLMS) algorithm has the numerical stability similar to that of inverse QRD-RLS algorithm. Additionally, to have an unbiased solution without compromising on robustness, computational cost and mean squares deviations, an adaptive step-size is used for the development of OPRLMS algorithm. The convergence criterion of LMS algorithm sets an optimal value for step-size parameter to have minimum mean squares deviation that is a measure of convergence in misalignment. However, step-size parameter is bounded by the spectral power of input signals, and its optimal value cannot be determined a priori because statistics of input signals are not always known a priori. This problem is controlled to great extent by the use of variable step-size, or more precisely by an adaptive step-size [8]. Major focus of this paper is on stationary stochastic environment, and therefore the adaptive step-size of proposed OPRLMS algorithm is realized by an optimal power of input signal. It is adaptive in the sense that its value is optimized adaptively according to the statistics of input signals. The proposed algorithm has linear complexity as that of conventional LMS algorithm, but is much faster than it and exhibit minimum mean square deviation from optimal solution as compared with other modifications of LMS algorithms. These characteristics make is highly suitable for applications with highly correlated input signals of known statistics. This paper is organized as follows: A brief summary of the conventional LMS algorithm is given in section 2. In section 3, a Cholesky factor based preconditioning technique is described along with the main idea of optimizing it to form an optimal preconditioned regularization in section 3.1. The highly efficient optimal preconditioned regularized LMS (OPRLMS) algorithm is developed in section 4. Experimental results of section 5 present the comparative performance of proposed algorithm in application of unknown system identification and PLI noise cancelation from real ECG signal. Both applications show preference of proposed algorithm over the rest, and make is highly efficient for applications with stationary environments.
A review of the LMS Algorithm
The least mean squares (LMS) algorithm is an adaptive filtering methods for solving the online estimation problem that is modeled by
Let ϒ = Diag (γ1, γ2, …, γ
N
) be the diagonal matrix, having eigenvalues γ1 ≤ … ≤ γ
N
of Φ as its diagonal entries, then corresponding eigenvectors
LMS-Newton algorithm is an ideally preconditioned algorithm, that is able to yield optimal Wiener solution in a single step in exact arithmetic [2]. In this algorithm the input vector Θ
n
, in correction term μ e (n) Θ
n
of (5), is preconditioned by the inverse Φ-1 of input signal’s autocorrelation matrix Φ. The modified update equation is:
If data matrix
The optimial preconditioner (OP) of the proposed regularized method is realized by optimizing a priori knowledge of the statistics of input signals. Since Cholesky factorization of a symmetric positive definite matrix is possible, and autocorrelation matrix Φ is a symmetric and positive definite (or semi-definite in some rare cases) matrix, assume that Cholesky factorization of Φ is possible. Then its Cholesky factor can be approximated by the Cholesky factor C n of an approximated autocorrelation matrix Φ n . The main idea is presented in following theorem.
Thus fast convergence can be achieved for the input vectors having autocorrelation matrix Φ∞ close to
To understand the concept of optimal preconditioner, a first order autoregressive (AR) input process θ (n) = a1θ (n-1) + ν (n) of the type described in [16] is considered.
Here a1 is a real number, and ν (n) a white noise process of zero mean. The autocorrelation matrix
As the value of α
n
increases, the ability of

Percentage of reduction in the eigenvalue spread of input autocorrelation matrix corresponding to parameter α n .
From above analysis, it seems logically true to design an optimal preconditioner
This section contains application of optimal preconditioner
Using
Convergence Criteria:. Rewriting equation (26) as,
With
Solving (27) for misalignment, and taking expectation
It shows that
The review of LMS algorithm in §2, and above discussion show that step-size μ is a measure of convergence speed of LMS based algorithms. Since it is bounded by eigenvalue spread of input signal, therefore is sensitive to change in correlation as a new signal comes in. This is the reason of slow convergence behavior of LMS algorithm. In case of NLMS algorithm, step-size changes adaptively with incoming signals, and algorithm have different step-size in each update. However, NLMS algorithm suffers from bad misadjustment especially when step-size gets large. A small step-size is to be used to obtain small misadjustment, and convergence in misalignment. It appears that a time dependent regularization of step-size may work better to adapt the changes in the characteristics of inputs signals.
Since spectral power
1:
2:
3:
4:
5:
6: e (n) = s (n) - y (n)
7:
8:
9:
Convergence Criteria:. Since μ
init
< 1, step 3 of Algorithm
Resemblance with NLMS Algorithm:. From above discussion, it can be emphasized that as n→ ∞,
In order to verify analytical results, and examine the performance of proposed OPRLMS algorithm, simulations are performed for unknown system identification and noise cancelation from real ECG signals.
Unknown system identification
For this application an autoregressive process process of unit variance is passed through a coloring filter with frequency response given by (21). The correlation parameter 0 ≤ α n < 1 is a measures of the correlation characteristics of incoming signal at instant n,as is shown in Fig. 1. It is required to identify a system whose exact output s (n) is given by
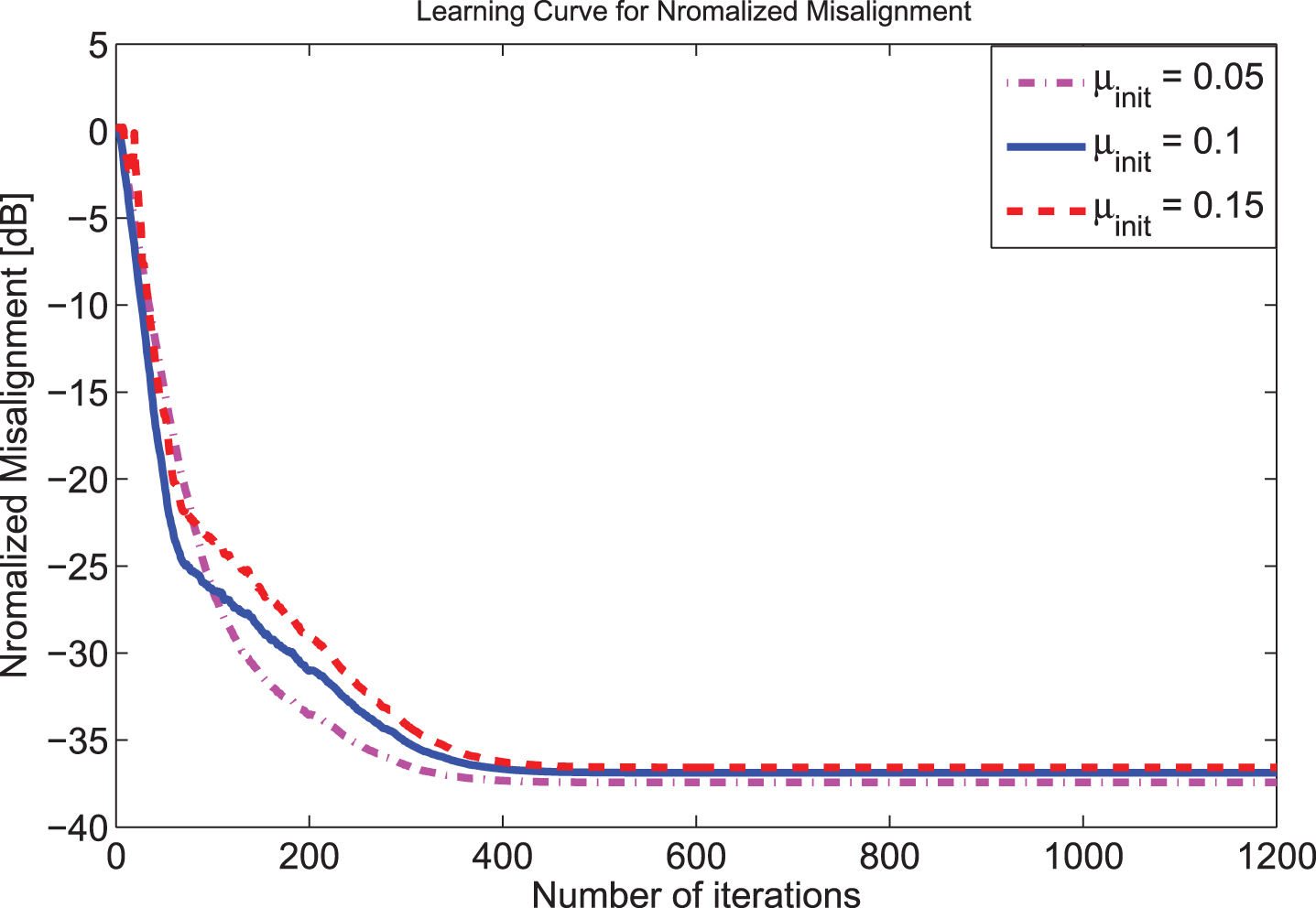
Choice of μ init . Initial estimate of step size plays an important role in parameter estimation for starting iterations. Setting ε1 = 10-4α n , Fig. 2 shows the results of three simulations corresponding to μ init = 0.05, 0.1 & 0.15. It is clear from these results that value of μ n decreases adaptively with an increase in time n. It is visible from Fig. 3 that larger the value of μ init , higher the value of initial normalized misalignment. It is therefore convenient to choose a smaller value of μ init to have better convergence in normalized misalignment. The results of Fig. 3 are obtained by an ensemble average of 500 independent runs.

Adaptive change in μ n with successive iterations for α = 0.6059931.
Learning curve of normalized misalignment [dB] for OPRLMS algorithm with N = 6 and 0.5 < α < 0.75.
Comparison. Simulation results of this section contain comparison of OPRLMS algorithm with conventional LMS algorithm, NLMS algorithm and TDLMS algorithm. Filter length for this simulation is N = 6, and all the results are obtained by taking average of 500 independent runs.
The experimental results are obtained after performing 1200 iterations. The first results is obtained for normalized misalignment, and this comparison is shown in Fig. 4(a). A mean value of α n = α is used for this experiment and this value in the interval (0.5, 0.75) for all n.
Another observation that is made during this experiment is the computation of the mean squares error (MSE) whose learning curve is shown in Fig. 4(b). This observation show the comparative convergence behavior for first 200 iterations. It is evident that although MSE behavior have slight improvement with OPRLMS algorithm, but misalignment behavior shows clear preference of proposed algorithm over the rest.

OPRLMS and conventional algorithms with N = 6 and 0.5 < α < 0.75.
This application presents the cancelation of powerline interference (PLI) from real ECG signals. ECG signal include valuable clinical information, but frequently this valuable information is corrupted by various kinds of noise presented in the recordings. For simulations real ECG signals are obtained from MIT-BIH database of physionet.com [17]. The MIT-BIH database contains 48 half hour waveforms of two channel ambulatory ECG recordings, which were obtained from 47 patients, including 25 men aged 32-89 years, and women aged 23-89 years. The recordings are digitized at 360 samples per second per channel with 11-bit resolution over a 10 mV range, and have different heartbeat frequencies depending upon the ages of the patients [18]. MIT-BIH signal ECG 101, of a female with age = 75 years, is used for performance study of proposed adaptive filtering algorithms. Performance of these algorithms is analyzed in terms of their efficiency to denoise ECG signal, and computation time. Since medical technicians are interested in accuracy of detecting events of ECG waveform, therefore a minimum norm (MN) analysis is provided to examine the efficiency of an adaptive algorithm to identify clean signal from the noisy one.
Cancelation of PLI Noise. PLI is an environmental noise that is often recorded along with the ECG signals and interrupt the exact diagnosis. However, it may be canceled by some efficient noise cancelation technique. Such noise is generated by changes in the alternating current (AC) in response to poor connection of recording machine. Owing to the AC characteristics, PLI is harmonic, and therefore if sampling frequency is 360Hz, PLI comes up with a frequency of 60Hz, 120Hz, 180Hz, etc. For experimental purposes, a PLI noise is simulated in Matlab, using formula
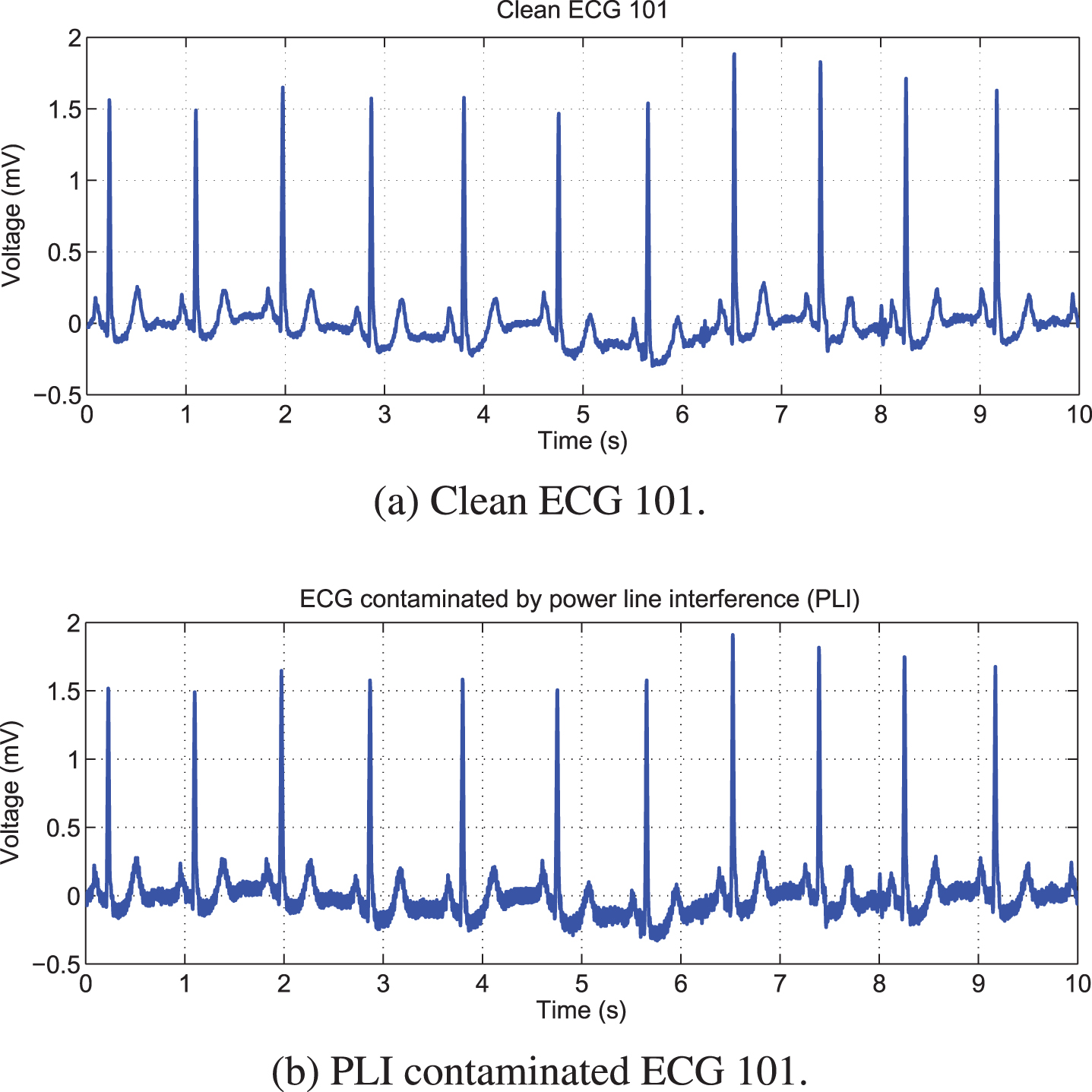
Clean and noise contaminated waveforms of ECG 101.
This simulation involves a comparative study of the performance of LMS, NLMS and OPRLMS algorithms in terms of their efficiency in noise cancelation. A common performance measure in signal processing is SNR, however, this tool is not effective in ECG signals. It is so because medical technician and scientists are generally interested in an accurate detection of clean ECG waveform out of noisy one in minimum possible time. For this reason the performance analysis of this section is done by computing the processing time taken by an algorithm in cancelation of PLI noise. Then Euclidean 2-norm of the difference between denoised ECG and clean ECG signal is computed, to observe the mean square deviation of the algorithm. Furthermore, denoised waveforms are recorded to observe the efficiency of a particular algorithm in cancelation of PLI noise from ECG. All simulations are performed for a filter length N = 5 and 10 seconds duration time, with n = 0 :0.002778 : 10.
The real ECG 101, obtained from MITBIH, is considered as the clean signal, and its waveform is shown in Fig. 5(a), while the PLI contaminated ECG 101 is shown in Fig. 5(b). The waveforms of denoised ECG signals, shown in Fig. 5a, are obtained by the application of LMS, NLMS and OPRLMS algorithms. An overall analysis of the results of Table 1, and denoised waveforms of Fig. 5a show preference of OPRLMS algorithm over the rest. Computational time for OPRLMS algorithm is slightly larger than LMS algorithm, however it is smaller than NLMS algorithm. On the other hand, value of 2-norm is least for OPRLMS algorithm. These results prove high efficiency of OPRLMS algorithm at nominal additional cost of computing optimal preconditioner and adaptive step-size. Time cost for these computations is far less than that of NLMS algorithms, while efficiency is much better than both LMS and NLMS algorithms

PLI denoised ECG waveforms for N = 5.
Processing time of each algorithm for noise cancelation, and norm of the deviation of denoised ECG from clean ECG 101.
In this paper, an insight into the need of preconditioning the regularization techniques in for online learning is highlighted. Setting a framework of factorization preconditioner for pre-whitening input data signals is shown to regularize the eigenvalue spread of input autocorrelation matrix by inverse Cholesky factor. Then representation of LMS-Newton algorithm as a factorization preconditioned algorithm developed the idea of using inverse Cholesky factor of correlation matrix to precondition LMS algorithm. Afterwards a stylized reformation of NLMS algorithm as a diagonally preconditioned algorithm and then as a step-preconditioned algorithms has lead to the importance of preconditioning. These realizations, and efficiency of optimal preconditioned regularization has produced an efficient OPRLMS algorithm with fast and unbiased convergence behavior. The optimal preconditioner, presented in this paper, is formed using optimizing the inverse Cholesky factor of inverse QRD-RLS algorithm for known statistics of input signals. The proposed regularization technique is developed at nominal computational cost, that is able to achieve a fast convergence rate for adaptive LMS filter without increasing too much in the complexity. Convergence analysis and experimental results have proved the preference of newly proposed OPRLMS algorithm over the existing preconditioned algorithms. These results show high efficiency of OPRLMS algorithm in the applications of unknown system identification and cancelation of PLI noise from real ECG signals.
Footnotes
Acknowledgment
The authors would like to acknowledge the financial support by Universiti Sains Malaysia through Research University Grant (RUI) (acc. No. 1001/PMATHS/8011040).