
Abstract
Shortest path (SP) optimization problems arise in a wide range of applications such as telecommunications and transportation industries. The main purpose of these problems is to find a path between two predetermined nodes within a network as cheaply or quickly as possible. Conventional SP problems generally assume that the arc weights are defined by crisp variables, though imprecise data have been lately incorporated into the analysis. The present study formulates the SP problem in a directed interval-valued triangular fuzzy network. The resulting interval-valued fuzzy SP (IVFSP) problem is converted into a multi objective linear programming (MOLP) problem. Then, a lexicographic optimization structure is used to obtain the efficient solution of the resulting MOLP problem. The optimization process confirms that the optimum interval-valued fuzzy shortest path weight preserves the form of an interval-valued triangular fuzzy number. The applicability of the proposed approach is illustrated through an example dealing with wireless sensor networks.
Keywords
Introduction
Being one of the main network optimization problems, shortest path (SP) problems are applied to a wide variety of real-life scenarios, ranging from transportation [1, 2] to routing and communication networks [3]. The main objective of this type of problems is to find a path with the least weight (cost, time or length) between two distinct nodes. In traditional SP problems, these weights are assumed to have precise values, which is not always the case in real-life situations. For instance, in the network considered in the current paper, the arc weights may account for transportation costs or traversal time. In this regard, the imprecisions inherent to traffic and weather conditions are usually represented via generalized types of fuzzy numbers, such as intuitionistic and interval-valued ones.
A variety of approaches has been introduced in the literature to deal with different types of SP problems in uncertain environments [4–11]. However, two main lines of research can be defined when considering the solution techniques applied to deal with FSP problems, namely, direct and heuristic approaches. Direct approaches range from applications of the extension principle to identify membership bounds along the SP (Niroomand et al. [12]) to the use of α-cuts to define distances among fuzzy weights (Yang et al. [13]). Complex evaluation structures incorporating multiple objectives in the definition of the SP require combining different solution techniques such as, for instance, the depth first search algorithm together with the fuzzy inference approach (Abbaszadeh Sori et al. [14]). In recent years, numerical heuristic techniques have gained increasing relevance. These range from the direct application of standard methods such as genetic algorithms (Hassanzadeh et al. [15]) and ant colony optimization (Jamil and Sharma [16]) to the design of hybrid models incorporating several heuristics (Elloumi et al. [17]).
Exploiting the relationship between SP problems and programming ones, Keshavarz and Khorra [18] simplified the FSP problem into a bi-level programming model and proposed an efficient algorithm to solve the resulting model. Dou et al. [19] solved the FSP problem in networks with multiple constraints applying vague multi-criteria decision making methods based on similarity measures. Deng et al. [20] extended the Dijkstra algorithm to solve FSP problems using the graded mean integration representation of fuzzy numbers. Kung et al. [21] took a dynamic programming approach to analyzing FSP problems in a network with discrete fuzzy arc weights. Yang et al. [22] introduced a novel algorithm to solve reliable FSPs in a mixed network with various fuzzy arc weights.
Recent developments have extended the framework of analysis to account for interval-valued fuzzy arc weights. In this case, membership functions are defined in terms of intervals instead of crisp values (Ebrahimnejad et al. [23]). Direct and heuristic solution approaches have also been developed within this extended framework to identify the corresponding SPs. For instance, Dey et al. [24] implemented a genetic algorithm to deal with the interval-valued fuzzy weights. On the other hand, Enayattabr et al. [25] applied dynamic programming methods to solve an all-pairs SP problem. In particular, these authors adapted the Floyd-Warshall algorithm to find SPs within interval-valued fuzzy environments.
Intuitionistic fuzzy environments have also been formalized within the SP problem framework (Mukherjee [26]). Biswas et al. [5] developed a method to search for intuitionistic FSPs between two nodes. Geetharamani and Jayagowri [27] proposed an algorithm to deal with the intuitionistic FSP problem using an intuitionistic FSP length procedure together with a similarity measure. Kumar et al. [9] designed an algorithm to find the shortest path and distance in a network with interval-valued intuitionistic fuzzy arc weights.
In the current paper, we formulate the SP problem within a directed interval-valued triangular fuzzy network and propose an efficient solution technique to find the optimum interval-valued fuzzy path weight and the corresponding interval-valued fuzzy optimal path. The analytic solution proposed relies on a sequential optimization process conditioned by a reference bound selected from the interval-valued fuzzy arc weights. The main differences with respect to the studies presented in the literature are given by the transformation of the interval-valued fuzzy SP (IVFSP) problem into a multi objective linear programming (MOLP) model and the subsequent lexicographic optimization structure defined to obtain the corresponding efficient solution.
While dealing with complex network structures transformed into MOLP problems, the suggested lexicographic process defines a formal structure that can be easily implemented and interpreted. In this regard, its capacity to identify SPs is conditioned by first component of the fuzzy upper bounds of the set of interval fuzzy weights. The sequential optimization process refines the initial set of SPs and identifies the shortest ones arising from the fuzzy interval bounds defining the subsequent optimization problems. This leads to a final set of SPs built on the initial bound considered from the interval-valued triangular fuzzy arc weights. As already stated, the model described is formally intuitive and easy to implement and interpret in real-life scenarios, with the optimum shortest path weight preserving the form of an interval-valued triangular fuzzy number.
The rest of the paper is organized as follows. In Section 2, some basic concepts regarding interval-valued fuzzy numbers are presented. In Section 3, the mathematical formulation of the SP problem within an interval-valued fuzzy environment is introduced. In Section 4, a novel lexicographic optimization method is proposed to solve the fuzzy SP problem. In Section 5, a numerical example in wireless sensor networks is provided to illustrate the applicability of the proposed solution technique. Section 6 concludes and suggests future research directions.
Preliminaries
In this section, we present some necessary basic concepts about interval-valued fuzzy numbers. The definitions provided are standard in the literature and can be found, for instance, in Ebrahimnejad and Verdegay [28].
Let F
TN
(λ) be the family of all level λ triangular fuzzy numbers, that is,
In this case,
Interval-valued fuzzy numbers will be used to represent the vague parameters of the SP problem under consideration.
We formulate now the IVFSP problem mathematically. Consider a directed network G = (V, E), where V ={ 1, 2, . . . , m } is the set of nodes and E ={ (i, j) : i, j ∈ V, i ≠ j } is the set of arcs. An ordered pair (i, j), where i, j ∈ E denotes a directed arc in this network. The network has two specific nodes, s and t, denoting the source and destination nodes, respectively. The sequence of arcs p ij ={ (i, i1) , (i1, i2) , …, (i k , j) } in which the initial node of each arc is the same as the end node of the preceding arc in the sequence defines a path p ij from node i to node j. The sum of the arc weights in a directed path corresponds to the weight of the path. The network includes a directed path from the source node to all the other nodes in the network.
The length (or cost) associated with the arc (i, j) is denoted by the non–negative weight c ij . The SP problem seeks a path with the least weight (cost, time or length) between the source node s and the destination node t. Standard SP problems assume that the arc weights are defined by crisp values. However, fuzzy variables must be considered in many real-life situations dealing with imprecise evaluations of the node weights.
The mathematical formulation of the IVFSP problem with interval-valued fuzzy arc costs follows:
In model (5), x ij are binary variables associated with each arc (i, j). If arc (i, j) belongs to the set of arcs included in the optimal path, then x ij = 1; otherwise, x ij = 0.
Let P
st
denote the set of all paths from node s to node t. Define
Assume that the interval-valued fuzzy arc weights of model (5) are all triangular. Thus,
By Definition 3, the interval-valued triangular fuzzy objective function of model (6) can be rewritten as follows:
Hence, the IVFSP problem (6) can be reformulated as the following MOLP problem:
According to Definitions 6 and 7, we need to adopt an approach for solving the MOLP (8) that not only provides us with an efficient solution but also preserves the form of a non-negative interval-valued triangular fuzzy number.
In this section, an efficient approach is proposed to solve the IVFSP problem defined in (6). We start by noting that the interval-valued triangular fuzzy objective function (7) has five different components that can be redefined as a multi objective function. We introduce a lexicographic optimization structure designed to solve IVFSP problems such as the one described in (8). The steps of the proposed method are summarized below.
The sequential lexicographic process conditions each SP on those previously obtained for the corresponding bounds of the interval fuzzy arcs. In this regard, the first step of the algorithm identifies the set of SPs upon which further refinements will be performed. The paths defined within the initial set of SPs are then subject to modifications in the weights of their arcs so that optimality prevails along the selected paths as we keep on considering further fuzzy interval bounds. That is, all additional optimization problems are constrained by the capacity of the SP selected to behave optimally in all the previous configurations defined by the interval fuzzy weights of the arcs.
The optimal value of the objective function within model (9), namely,
It should be emphasized that the conditioning structure implicit in the optimization process described through the current section drives the behavior of the entire model. That is, the initial set of SPs determined by
For instance, when solving the second optimization problem to obtain the value of
If |E1| = 1, then the unique element of E1 is an efficient solution of MOLP (8).
If |E1| > 1, then E1 contains an element that is an efficient solution of MOLP (8).
Case ii: Assume that |E1| > 1. Choose an arbitrary element of E1, i.e.,
The optimal value of the objective function within model (10),
If |E2| = 1, then the unique element of E2 is an efficient solution of MOLP (8).
If |E2| > 1, then E2. contains an element that is an efficient solution of MOLP (8).
Case ii: Assume that |E2| > 1. Choose an arbitrary element of E2, i.e.,
The optimal value of the objective function within model (11),
If |E3| = 1, then the unique element of E3 is an efficient solution of MOLP (8).
If |E3| > 1, then E3 contains an element that is an efficient solution of MOLP (8).
The optimal value of the objective function within model (12),
If |E4| = 1, then the unique element of E4 is an efficient solution of MOLP (8).
If |E4| > 1, then E4 contains an element that is an efficient solution of MOLP (8).
The optimal value of the objective function within model (13),
If |E5| = 1, then the unique element of E5 is an efficient solution of MOLP (8).
If |E5| > 1, then E5 contains an element that is an efficient solution of MOLP (8).
The solution of problem (13) corresponds to the optimal path between nodes s and t. Moreover, the optimal interval-valued triangular fuzzy path weight is given by
The proposed algorithm provides a novel framework of analysis to formalize and solve SP problems with interval-valued triangular fuzzy arc weights. The algorithm builds on the linear programming approach to SP problems, allowing us to adapt the set of constraints as we incorporate to the analysis the lower and upper bounds of the different interval fuzzy numbers determining the weights of the arcs. The procedure consists of selecting an initial set of SPs and refine it through the corresponding minimization problems defined by the subsequent bounds of the interval fuzzy arcs.
One of the main advantages of the algorithm relies on its computational simplicity, allowing for its implementation within complex network structures. That is, the set of linear minimization problems constitutes an intuitive framework on which to build the lexicographic optimization structure designed to solve the MOLP problem defined by the interval-valued arc weights of the network.
The model can therefore be interpreted as a sequence of path refinements conditioned by the
The only requirement for the model to define a SP is that the initial subset is not empty. If it were to contain only one element, it would coincide with the final SP selected through the sequential optimization process, since it would be the only path satisfying the remaining constraints. On the other hand, a large set of initial SPs that is progressively refined but does not lead to a unique SP implies that the decision maker may consider different equally optimal alternatives.
Note that any potential solution to the problem must consider the interactions taking place among the different lexicographic steps and subsets of SPs, since any constraint regarding the set of optimal SPs must be carried forward through the whole minimization process.
Application to wireless sensor networks
A wireless sensor network (WSN) is comprised of multiple sensor nodes that use irreplaceable batteries. These nodes tend to be randomly scattered through a geographical area. Generally, wireless sensor networks are responsible for collecting data from their environment and passing it to a specific node called “Sink”. The most restrictive constraint imposed by WSNs is the energy sources that limit the lifetime of the network [29, 30]. In this regard, the lifetime of the network can be extended using energy aware protocols designed to save as much energy as possible. That is, since the sensor nodes are unreachable, one of the main challenges in a WSN is energy consumption efficiency, aimed at prolonging the network’s lifetime. Hence, finding the shortest path to send data leading to a reduction in energy consumption in a WSN is a crucial problem. Since energy consumption cannot be measured exactly because of environmental conditions, interval-valued fuzzy data is used to formalize the SP problem in a WSN.
Figure 1 provides an example of a WSN with six sensor nodes. The neighbor nodes are connected to each other through ten arcs. The interval-valued triangular fuzzy arc weights are given in Table 1.
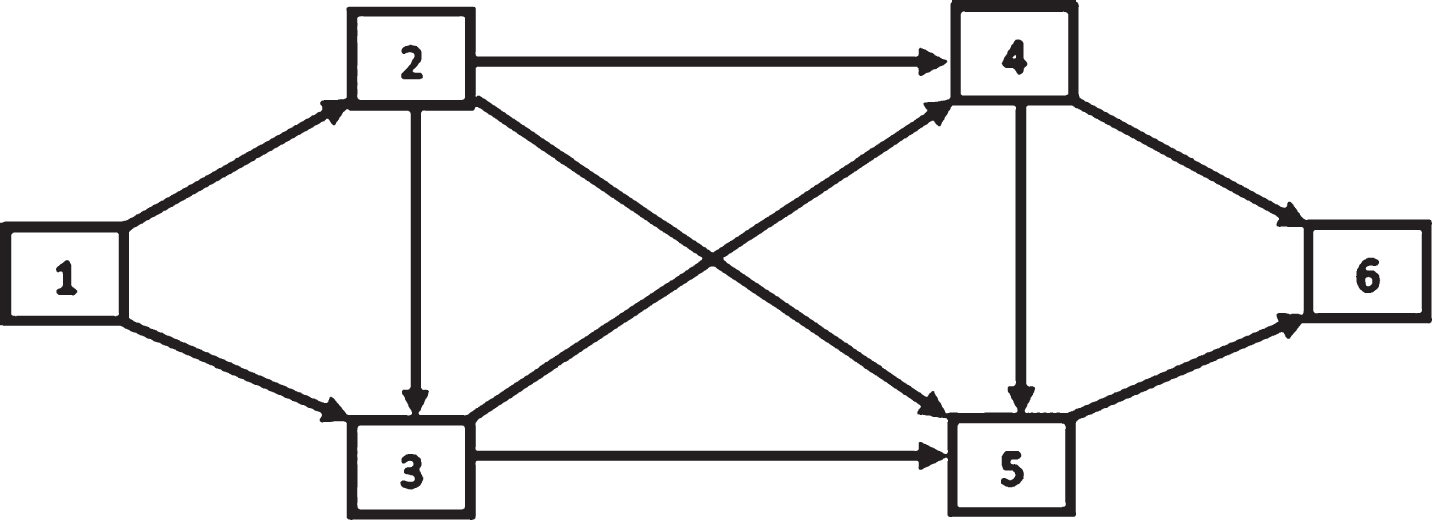
An example of WSN.
Arc information in terms of interval numbers
The IVFSP problem based on the interval-valued fuzzy arc weights given in Table 1 is formulated as follows:
The interval-valued fuzzy optimal path weight and the corresponding interval-valued fuzzy optimal path of the IVFSP problem (14) can be now derived using the proposed method, as follows:
The optimal value of problem (15) is given by
The optimal value of problem (16) is given by
The optimal value of problem (17) equals
Similarly, applying Steps 4 and 5 of the proposed method, the optimal path and the optimal interval-valued fuzzy path weight of the IVFSP problem (14) are defined as follows:
That is, the interval-valued fuzzy optimal path is
Traditional SP problems assume crisp arc weight values, which are not always available when dealing with real-life scenarios. We have analyzed a shortest path problem with interval-valued triangular fuzzy arc weights and proposed a novel solution approach. In particular, we have converted the IVSP problem into five crisp linear programming problems that can be solved using standard algorithms. The path selected must satisfy the set of optimality conditions defined for all the arc weights as they continue to be incorporated through further restrictions to the corresponding linear programs.
The set of sequential minimization problems provides an intuitive framework on which to build the lexicographic structure designed to solve the MOLP problem defined by the fuzzy interval arc weights and allows for different strategic setting to be introduced depending on the relative spread of the fuzzy intervals. The suggested procedure can be easily implemented by decision makers from different research disciplines so as to evaluate its behavior as it converges from the initial set of potential alternatives to the final SP selected.
Among the potential extensions derived from the current model, we must emphasize its applicability to SP problems with interval-valued intuitionistic fuzzy costs and generalized Pythagorean fuzzy numbers [31–33], as well as its capacity to integrate lexicographic structures within MOLP problems to account for different types of uncertain variables.
Footnotes
Acknowledgment
The authors would like to thank the anonymous reviewers and the associate editor for their insightful comments and suggestions.