
Abstract
Hybrid energy storage system supplies a feasible solution to battery peak current reduction by introducing supercapacitor as auxiliary energy source. Energy management control strategy is a key technology for guaranteeing performance. In this paper, we describe a predictive energy management strategy for battery and supercapacitor hybrid energy storage systems of pure electric vehicles. To utilize the supercapacitor reasonably, Markov chain model is proposed to predict the future load power during a driving cycle. The predictive results are subsequently used by power distribution strategy, which is designed using a low-pass filter and a fuzzy logic controller. The strategy model is developed under MATLAB/Simulink software environment. To validate the performance of the proposed control strategy, a comparison test is implemented based on a 72 V rated voltage hybrid energy storage system experimental platform. The results indicate that the battery peak currents by proposed predictive control strategy are reduced by 26.32%, 28.21% and 27.12% under the UDDS, SC03 and NEDC three driving cycles respectively.
Keywords
Introduction
The consumption of petrochemical resources and the increasing environment problems in air pollution have greatly promoted the development of various electric vehicles, including pure, hybrid and plug-in hybrid electric vehicles. On the one hand, a continuous yet primary energy supply is needed to meet the desired traveling range of an electric vehicle. On the other hand, peak power with high current demand is often necessary to handle vehicle acceleration and regenerative braking for vehicle performance and energy recovery. Of all the energy storage devices, batteries are most widely used. Although many technological breakthroughs have been achieved, the batteries still have some evident drawbacks, such as high initial cost, short traveling distance and long charging time. Especially for pure electric vehicles, batteries alone require both high specific power densities for meeting the peak power demand of vehicle acceleration and deceleration operations, and also high energy densities for meeting long traveling distances. However, both requirements cannot be fully satisfied based on current battery technologies. Frequent charge and discharge operations have server adverse effects on battery lifetime. This requires proper battery cell balancing to prevent individual cell voltages from drifting apart over time, which leads to rapid decreases of the total pack capacity, or even complete system failure [1–4]. Supercapacitors on the other hand, have much higher power density and have emerged as an attractive pairing for batteries, correcting for flaws such as short cycle lifetime and low power density. They can deliver more than a million life cycles by storing energy in an electrostatic field, much more than batteries, since batteries rely on a chemical reaction to dissipate stored energy and have life of hundreds to low thousands of cycles. Besides, the charge and discharge performance of the supercapacitors are obviously superior to the batteries due to their smaller internal resistances. A combination of batteries and ultracapacitors to form hybridized energy storage systems with combined power density and energy density provides an effective solution to the performance dilemma of sole energy storage system [5–10].
Literature review
A key point is how to design an efficient energy management control strategy for battery and supercapacitor hybrid energy storage systems. Specifically, energy management control strategies should determine the appropriate amount of power for each energy storage system according to their actual energy states. From the point view of control model, the energy management control strategies have been divided into two categories: optimization-based control strategies and rule-based control strategies respectively [11, 12].
In optimization-based strategies, the cost functions are designed using past data and are minimized based on future variables/inputs. The controllers are usually optimized offline and then implemented on hybrid energy storage systems. A commonly used optimization method is dynamic programming, where a state model for the hybrid energy storage system need to be first built and a control system that would seek the global optimal power sequences for the battery and supercapacitor is subsequently established [13]. Although the dynamic programming algorithm can give the best solutions in theory, it requires the priori information of a driving cycle and thus is time-consuming. The optimized results are often used as benchmarks for optimizing other energy management control strategies. Global search heuristics are also important members of the global optimization family, which find exact or approximate solutions for complex nonlinear controls and the objective functions that will evolve toward their minimum values. They have been adopted for developing controllers of hybrid energy storage systems, including particle swarm optimization [14], genetic algorithm [15], DIRECT global optimization [16]. To seek tradeoffs between control performance and calculation time, the global optimization algorithms have been simplified into instantaneous ones and the optimization horizons are shortened depending on specific application conditions. In [17], the authors used equivalent consumption minimization strategy (ECMS) to online optimize power flow between two power systems. In the ECMS, the battery charge was converted to the equivalent fuel coefficient, and the total fuel consumption (actual and equivalent) was minimized at each sampling interval. In [18], a model predictive controller (MPC) was developed for real-time power flow optimization during operation, considering physical constraint limitations of each power source in the system. In [19], an optimal operation management framework of clean smart islands was proposed based on primal-dual method of multipliers. This method was proved to be effective in dealing with energy communication problem.
From the perspective of practical engineering application, rule-based strategies are the best ideal candidates because they have good real-time performance and robustness. Such features are mainly based on their simple control structures. The deterministic rule-based control systems perform on a set of rules that have been pre-defined and carried out prior to actual operation. In [20], a multimode control system for hybrid energy storage systems of pure electric vehicles was developed for implementing power distribution. The vehicle operation state switching was realized by a set of logic rules depending on the energy states of battery and supercapacitor. The effectiveness of the proposed method was validated by simulation test. In [21], a new topology structure for hybrid energy storage system was designed. In the topology structure, different working modes was switched by deterministic logic rules. In [22], in order to recycle more braking energy and increase the diving distance of an electric vehicle, the discharge of the supercapacitor was controlled by some simple control logics according to the acceleration states of electric vehicle. The determined rule strategy can realize good control performance by tuning rule parameters reasonably. Fuzzy logic-based strategies are perfect for time-varying and nonlinear control systems, as they are adaptable and robust to parameter variations and easily adjustable [23, 24]. An adaptive energy management control system using fuzzy logic was designed in [25]. In this system, fuzzy rules were determined according to specific driving cycle information, namely the control rules were switched depending on the variations of the driving cycles. Such system can further improve the controller performance, but more control logics are also needed. The rule-based strategies can adjust the peak power between the two energy sources, but they fail to deal with rapidly changing power variations. Urban electric vehicles often need obviously shifty and stochastic power demands for responding uncertain traffic conditions, such as frequent acceleration and deceleration operations, up-hill followed by down-hill runs, etc. To match the dynamic response features of the battery and supercapacitor, filtration-based strategy was further proposed for extracting different frequent components. In [26], load power demand was decomposed into high frequent part and low frequent part. The high frequent part was assigned to the supercapacitor because of its quick charge and discharge rates, and the low frequent part was shared by the fuel cell and battery based on their slow response features. In this way, the load power demand can be satisfied effectively and the system energy loss can also be reduced.
In summary, rule-based and filtration-based strategies have their advantages, a combination of the two is expected to achieve a better control performance. In [27], a combination of wavelet and fuzzy logic was proposed for a hybrid energy storage system. In this strategy, wavelet was used to analyze and capture the transients of load power demand. After that, a fuzzy logic controller was further designed for regulating power flow among energy sources depending on the supercapacitor. Energy management systems with ability to predict vehicle conditions can achieve better control performance. At present, the study of vehicle condition prediction has two main ideas. Some researchers use advanced technologies such as geographic information systems (GIS) and global positioning systems (GPS) to obtain future vehicle speed, slope, and other data. For example, in [28], a scenario-based drive mission for a heavy diesel truck was studied. Look-ahead terrain information was used for optimizing the velocity trajectory with respect to a criterion formulation that weighs trip time and fuel consumption. In [29], the potentials of 3-D road terrain maps were quantified to improve the fuel economy of a parallel hybrid vehicle. Some researchers use methodologies to predict future vehicle condition information. For example, support vector machine method was used to predict the current driving cycle based on the classification results. Finally, according to the current operating cycle slope information, a switchable driving controller is established. In [30], specific roadway types and traffic congestion levels were predicted using learning vector quantization (LVQ) neural network algorithm to emulate the optimal solutions generated by DP, and generalized the optimal power settings to real-world vehicle operation based on the predictive driving condition information. In this study, we propose an energy management control strategy based on a combination of filtration and fuzzy logic for battery and supercapacitor hybrid energy storage system of pure electric vehicles. Different from prior research work, Markov chain model is introduced to the proposed strategy for improve the control performance. The effectiveness of the proposed method is validated based on a 72 V battery and supercapacitor hybrid energy test platform. Some stochastic problems of energy management have been discussed, for example, in [31], stochastic scheduling problem of hybrid AC/DC microgrids considering the plugin hybrid electric vehicles charging demands was studied. In this work, a data-driven framework based on point estimate method and support vector machine was developed to model the uncertainty effects. In [32], the power output uncertainty of the renewable resources was modelled using the Unscented Transform (UT) approach owing to its capability of correlation modelling. In [33], A stochastic framework was designed using point estimate method (PEM) to capture the uncertainties of the photovoltaic and wind turbine forecast error, power company price, the operating temperature of the proton exchange membrane fuel cell, the price for natural gas, price for selling hydrogen, and the pressure of the H2 and O2 in the fuel cell stack. In [34], an effective stochastic framework for smart coordinated operation of wind park and energy storage unit was proposed and the problem formulation was constructed as a tri-level max-min-max structure for getting more sensible results. These above proposed methods handle uncertainties in system components. In this work, the basic idea is to model the driving cycle as a stochastic process considering the uncertainty of the traffic condition.
Energy management strategy description
In this study, the control framework of the proposed energy control strategy is depicted in Fig. 1.
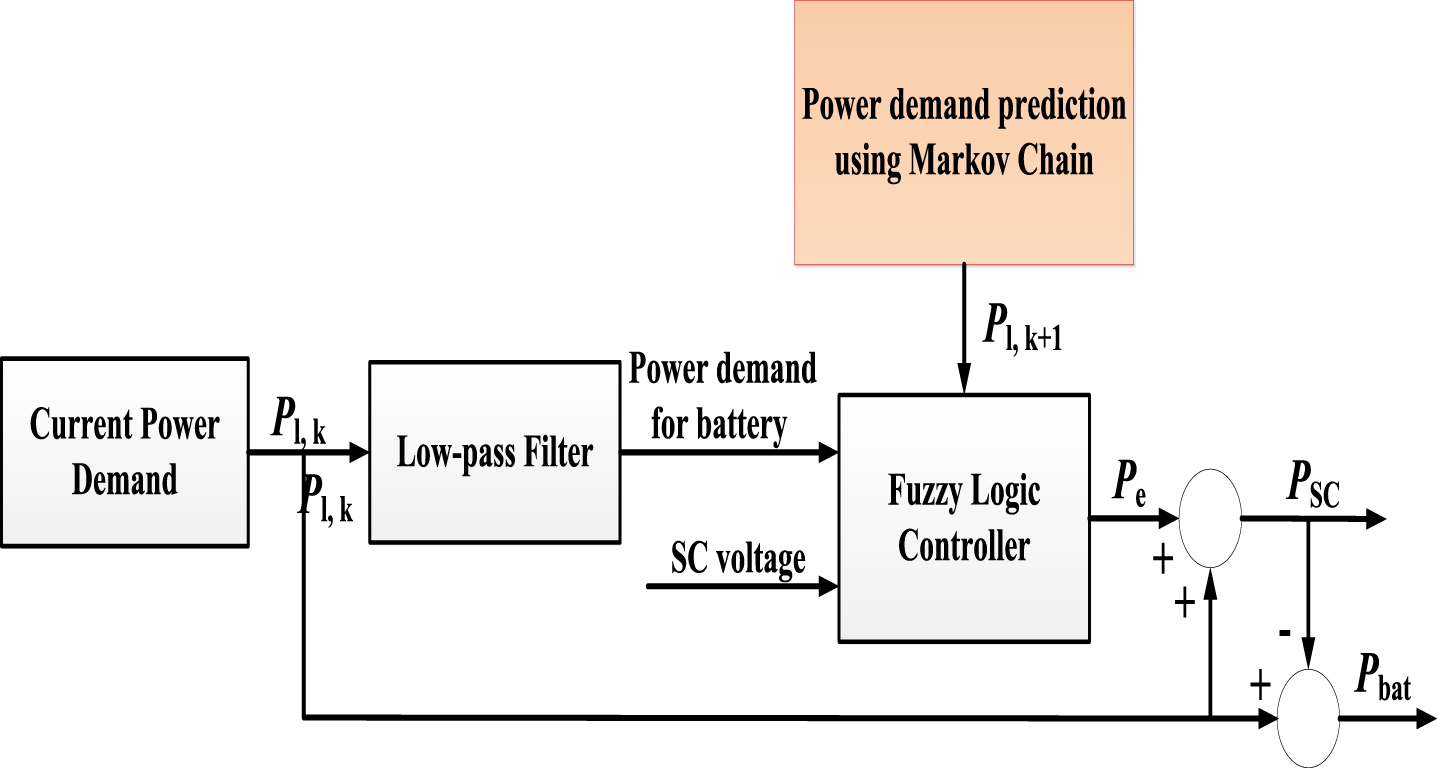
Control framework of the proposed predictive energy management control strategy.
In the strategy, the load power demand calculated from vehicle model is first decomposed into low and high frequency components. The low frequency power demand is planned for the battery system. After the filter operation, the battery power is further adjusted by a fuzzy logic controller according to the supercapacitor voltage. The fuzzy logic rules are designed according to the predictive results of the Markov chain model. Each part of the proposed energy management strategy will be explained detailly in the following sections.
The actual power demand of an electric vehicle is strongly affected by the traffic conditions, especially for urban traffic conditions. Owing to uncertain and random incidents, the power values for energy storage systems are often largely fluctuating. In the conventional sole energy source system, the battery is frequently suffering from the drastically power peak and high frequent variation, which would potentially degrade the battery electrochemical reaction and thus increase internal resistance and energy loss. To overcome this problem, a low-pass filter is employed for decomposing the load power demand into low and high frequent components. The specific filter model is directly adopted in the MATLAB/SIMULINK software module. For convenience, symbol P
LF
is used to represent the low frequency power value from the filter, symbol P
HF
is used to represent the high frequency power value from the filter, and symbol P
load
is used to represent the load power demand. Consequently, the following two relationship expression can be given by
In this work, we model vehicle acceleration state in the upcoming time step by the following first order Markov chain.
To obtain Markov transition probabilities, the observation data need to be collected from selected driving cycles and then calculate it by the following expression.
Fig. 2 shows the acceleration transition probabilities of UDDS, SC03 and NEDC driving cycles. It can be observed that the state transition probabilities of the three driving cycles are obviously different. Based on speed and acceleration information, the power demand at the next moment can be calculated in (5)and (6).
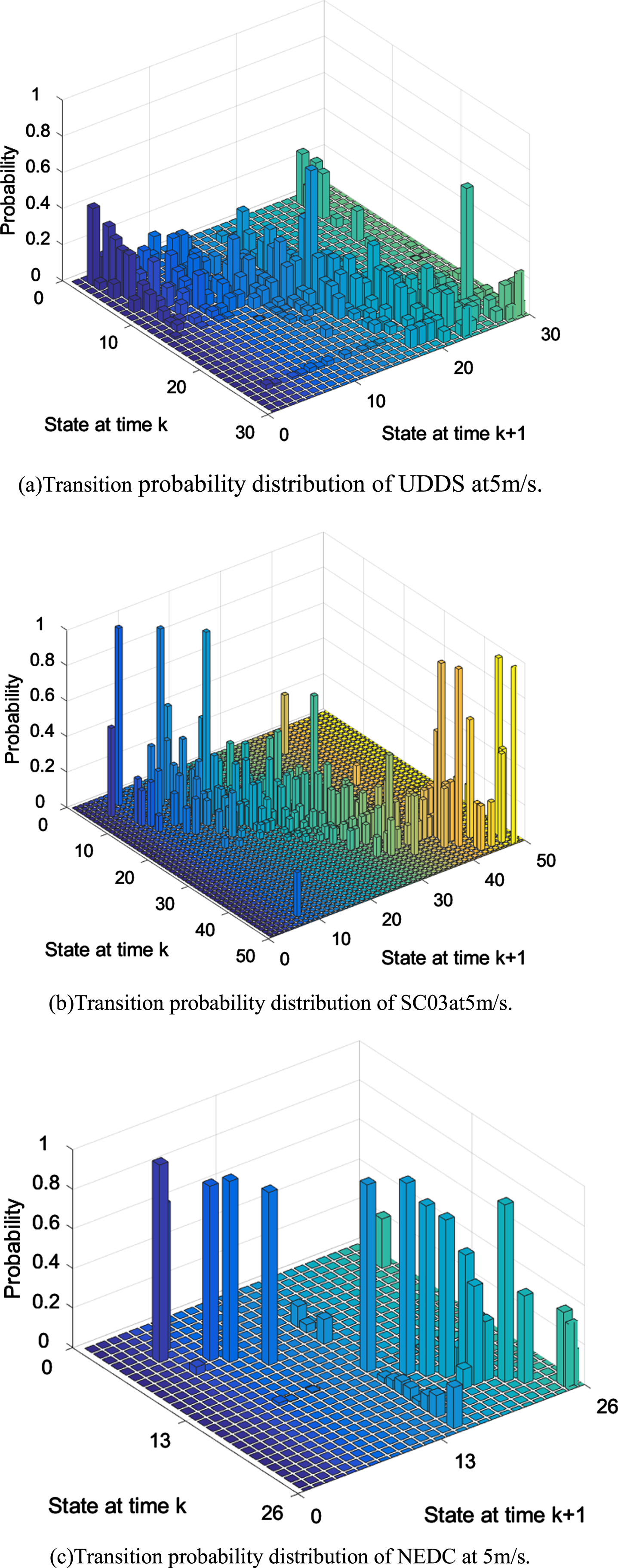
The state transition probabilities of UDDS, SC03 and NEDC driving cycles.
The parameter values of vehicle model adopted in this study
In this subsection, a fuzzy logic controller is designed for regulating power flow between the battery and supercapacitor. The input parameters of the fuzzy controller are the low frequency current obtained from the low-pass filter and supercapacitor voltage, and the output parameter is the surplus current distributed to the supercapacitor for voltage regulation. Different types of membership functions are employed for partitioning the possible variation range of input and output parameters into several fuzzy areas. The current input parameter has four fuzzy domains, which are entitled with negative large (NL), negative small (NS), positive small (PS), positive large (PL). The supercapacitor voltage has three fuzzy domains, which are entitled with low (L), medium (M), high (H). The fuzzy domains used for the output parameter are similar with that of the current input parameter.
In order to obtain an improved fuzzy controller so that the battery current can be effectively reduced. The membership function curves of inputs and output are designed according to the possible power demand levels. An electric vehicle has the same driving state at current and next time interval, namely an electric vehicle is currently in driving state, according to Markov prediction, at the next time interval, it will be still in driving state; or an electric vehicle is currently in braking state, according to Markov prediction, at the next time interval, it will be still in braking state. Either driving or barking states, the fuzzy controller should can reasonably control the supercapacitor discharge for satisfying the continuous power supply of an electric vehicle. The membership function curves of input and output parameters are plotted together using Fig. 3. As for the battery current, the triangular membership function is employed for dividing the current variations into four fuzzy areas from 0 to 100 A, as pictured using Fig. 3(a). For the supercapacitor, in this work, the voltage variation is preset from 0.2 to 1. The triangular curves are employed for the low and high voltage areas, as shown using Fig. 3(b). For the surplus current, the layout of the membership function curves is the same with that of the battery current.
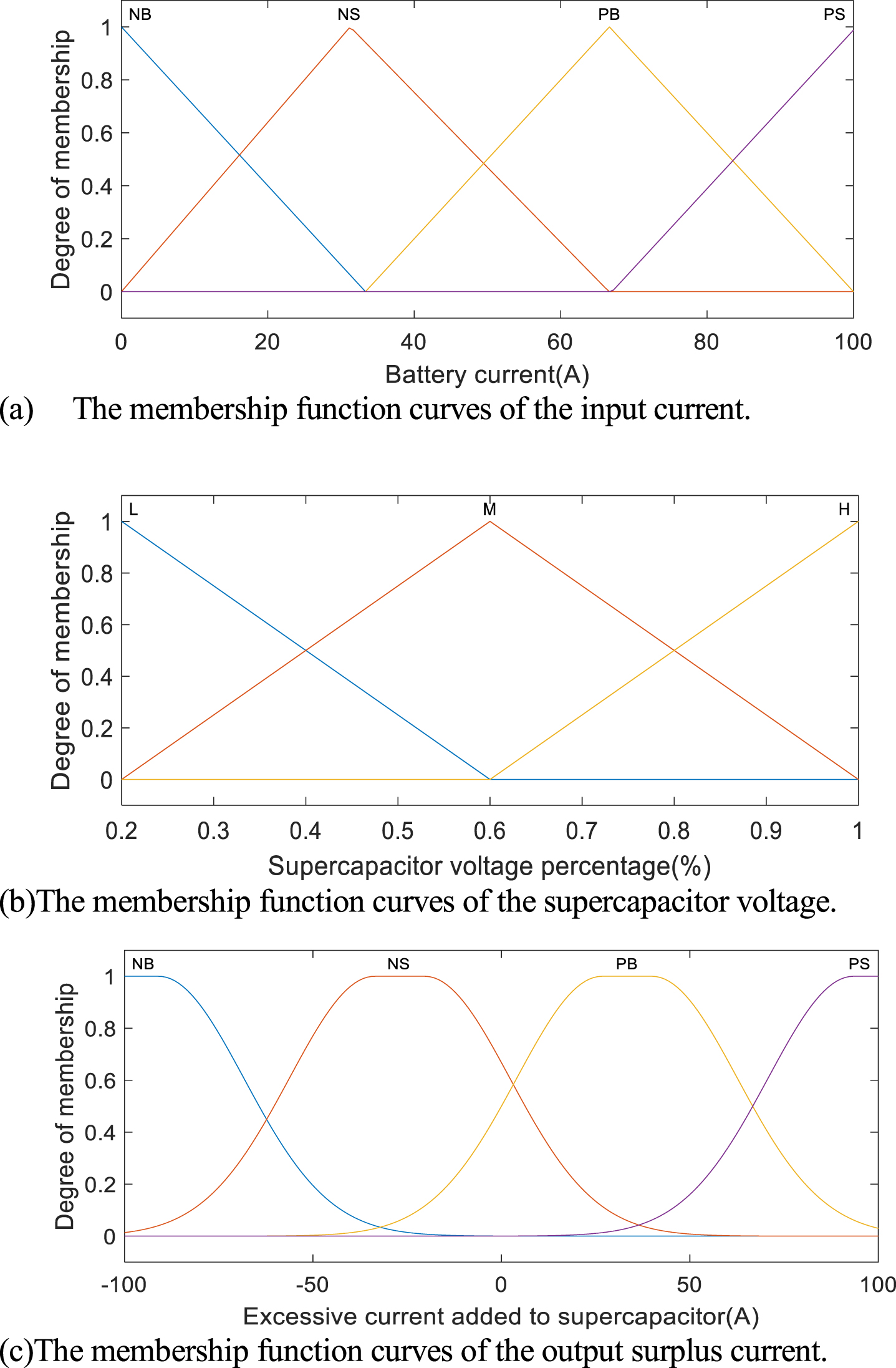
The membership function curves of the input and output parameters.
In this section, a dedicated scaled-down experimental platform for a battery and supercapacitor hybrid energy storage system is established, as pictured using Fig. 4. This experimental platform consists of a NEWARE load simulator that is utilized for generating charge-discharge current demand of an electric vehicle, a RapidEUC from HUAHAI Technology that is utilized for energy management control strategy implementation, a DC/DC converter that is utilized for controlling supercapacitor voltage with its current supervision. At each sampling interval, the measured power value of supercapacitor pack is compared with the required power value calculated from energy management strategy. The power difference will be sent to a preset PI controller for generating control signal of the DC/DC converter. The energy sources include a battery pack and a supercapacitor pack. The battery pack is configured with 22 lithium iron phosphate (LiFePO4) cells in series. The supercapacitor pack is configured with six 48 V Maxwell modules in two parallels. The primary parameters of all the systems mentioned above are given in Tables 3–6.

A dedicated scaled-down experimental platform, which includes: (1) battery pack, (2) supercapacitor pack, (3) RapidECU, (4) DC/DC converter, (5) load simulator, (6) PC.
Fuzzy rules for combining input and output variables
Primary parameters and their ratings for DC/DC controller
Primary parameters and their ratings for load simulator
Primary parameters and their ratings for battery pack
Primary parameters and their ratings for supercapacitor pack
In this section, UDDS, SC03 and NEDC three driving cycles are chosen as test cycles. Considering the current and voltage limits of the actual battery and supercapacitor systems, the power demands generating from above three driving cycles using vehicle parameters displayed in Table 1 are scaled down by 3. Figures 5–7 give the comparative results between energy management strategies with and without Markov chain prediction.
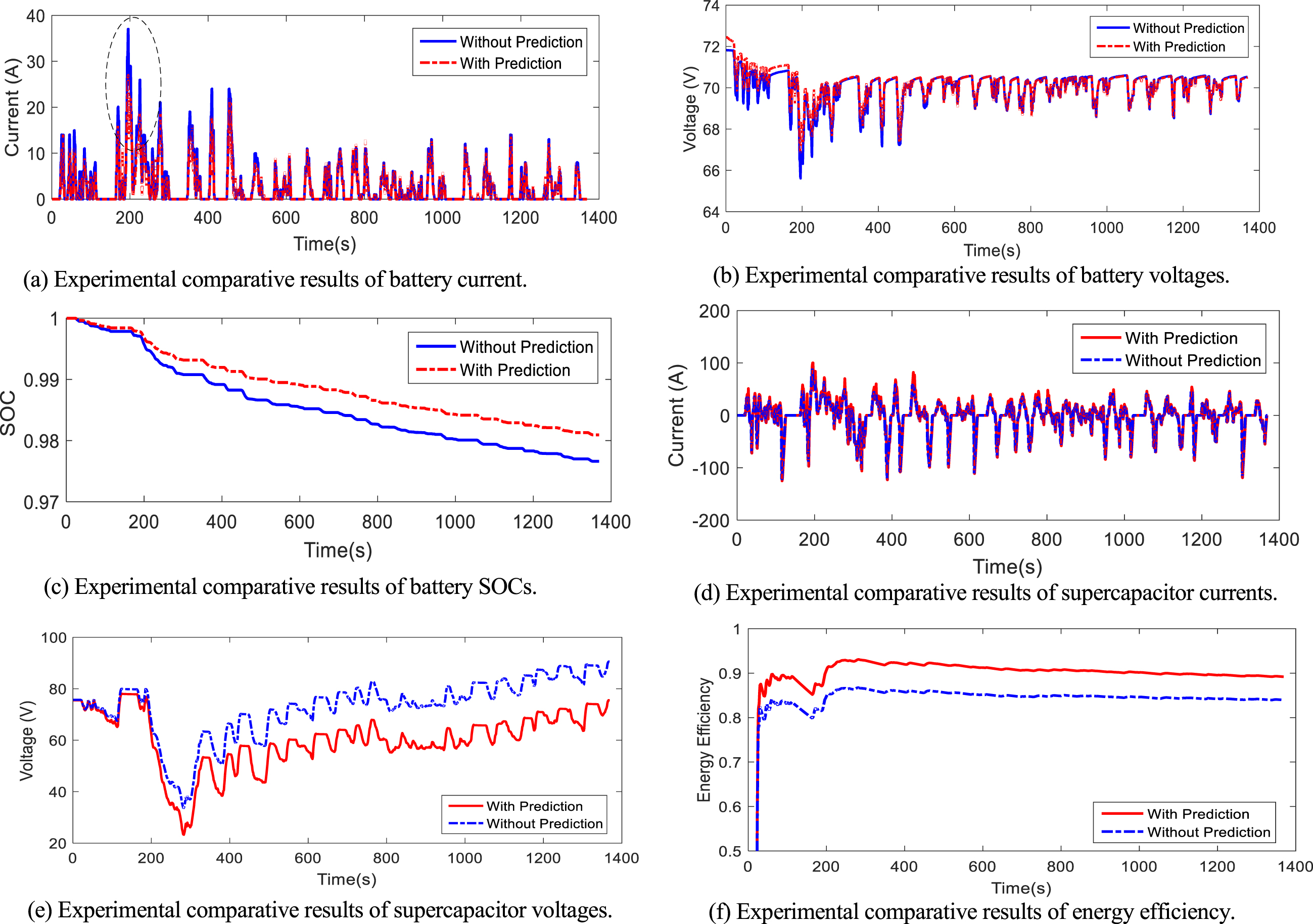
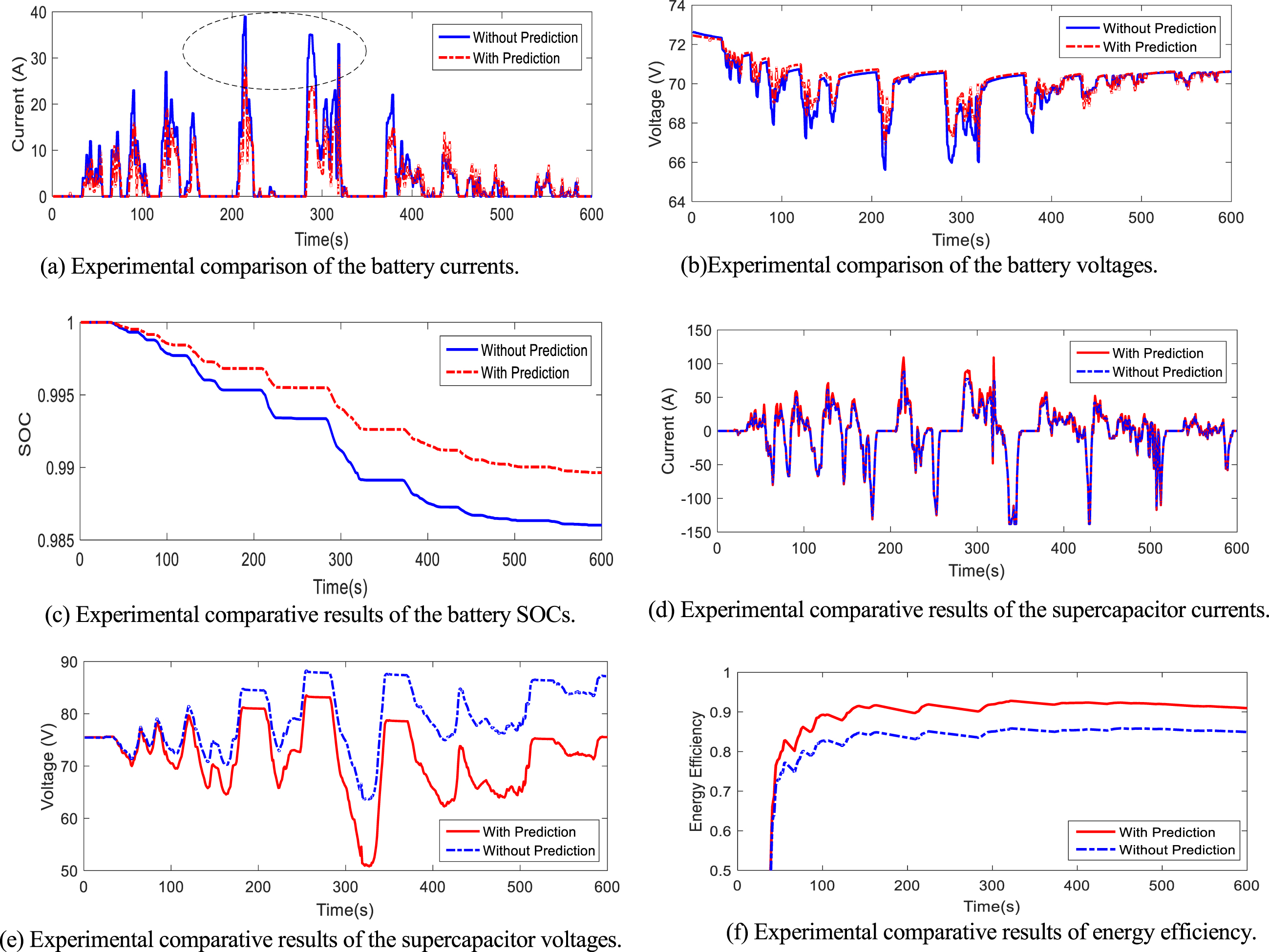
Voltage and current behaviors of battery and supercapacitor under UDDS driving cycle. The red indicates the results that are obtained with Markov prediction, and the blue indicates the results that are obtained without Markov prediction.
Voltage and current behaviors of battery and supercapacitor under SC03 driving cycle. The red indicates the results that are obtained with Markov prediction, and the blue indicates the results that are obtained without Markov prediction.

Voltage and current behaviors of battery and supercapacitor under NEDC driving cycle. The red indicates the results that are obtained with Markov prediction, and the blue indicates the results that are obtained without Markov prediction.
The curve evolutions of battery currents under UDDS driving cycle are compared in Fig. 5(a). The red indicates the result that is obtained by the proposed control with Markov chain prediction, and the blue indicates the result that is obtained by the control without Markov chain prediction. We observe that at time t = 200 s, the battery current is up to its maximum value 38 A by the strategy without Markov chain prediction, compared with 28 A by the proposed control with Markov chain prediction, the reduction is up to 26.32%. For the other time points, we can find that the battery current by the proposed control strategy is still smaller than that by the strategy without Markov chain prediction. The difference demonstrates that the Markov chain prediction helps to shave battery current at sudden required current. For the SC03 and NEDC driving cycles, the current reductions are up to 28.21% and 27.12% respectively. On the basis of above analysis, it is demonstrated that the peak current of the battery can be effectively shaved by introducing Markov chain prediction model.
Figure 5(b) gives the experimental comparative results of battery voltages under the UDDS driving cycle. We can observe that the proposed control with Markov chain prediction can contribute a more stable battery voltage. From the curves, the maximum voltage drop is 67 V by the proposed control with Markov chain prediction, which is higher than 65 V by the control without Markov chain prediction at the maximum current point. The difference can be widened as the load current increases. When the load current increases, the maximum voltage drop increases as well. This can further demonstrates the proposed control strategy can help battery cell balancing to prevent individual cell voltages from drifting apart over time, which leads to rapid decreases of the total pack capacity, or even complete system failure. For the SC03 and NEDC driving cycles, much bigger voltage drops can be found at the maximum current points.
Figure 5(c) gives the experimental comparative results of battery SOCs under the UDDS driving cycles. The final value of the battery SOC is 0.981 by the proposed control with Markov chain prediction while the final value is 0.977 by the control without Markov chain prediction. Although the difference between the two control strategies is small, it still makes sense to extend the driving distance of an electric vehicle. When the driving distance increases, the difference can be obvious. The battery SOC is an important indicator for evaluating the driving distances of the electric vehicles.
For the SC03 and NEDC driving cycles, the similar results can be found.
The curve evolutions of supercapacitor currents under UDDS, SC03 and NEDC driving cycles are illustrated in Figs. 5–7(d). Since the current demands generated from the three driving cycles are provided by the battery and supercapacitor jointly, therefore, if the battery current is large, then the supercapacitor current can be small based on fixed current demand, and vice versa. From Fig. 5(d), the proposed control with Markov chain prediction can engage the supercapacitor in absorbing more discharge currents compared with that of the control without Markov chain prediction. This can prevent the battery from large current shock and extend its lifetime. In addition, owing low resistance and high energy deliver efficiency, more regenerative breaking energy can be effectively recovered by the supercapacitor. Figure 5(d) illustrates the experimental comparative results of supercapacitor voltages under the UDDS driving cycle. We can find that the lowest voltage point of the supercapacitor is nearly 20 V by the proposed control with Markov chain prediction, while the lowest voltage point of the supercapacitor is 35 V by the control without Markov chain prediction. This indicates that the supercapacitor is utilized fully for battery peak current reduction. Nevertheless, the supercapacitor is still controlled reasonably after a driving cycle because the final voltage value of the supercapacitor is nearly the same with its initial value, which can guarantee the supercapacitor has enough energy for next driving cycle.
The curve evolutions of system energy efficiency under UDDS, SC03 and NEDC driving cycles are illustrated in Figs. 5–7(f). From the comparative results, it can be observed that the system energy efficiency is 90% by the proposed predictive control with Markov chain prediction, while the system energy efficiency is 80% by the conventional strategy without Markov chain prediction. This is because that more vehicle regenerative braking energy are effectively absorbed by the supercapacitor by introducing Markov chain prediction module, namely the supercapacitor can absorb more negative current.
In this paper, a predictive energy management control strategy has been proposed for battery and supercapacitor hybrid energy storage systems of pure electric vehicles. The control strategy has been implemented based on a 72 V battery and supercapacitor hybrid energy storage system experimental platform. To validate the effectiveness of the proposed predictive control strategy is compared with the conventional control strategy without prediction based on UDDS, SC03 and NEDC driving cycles. The main findings in this study are summarized as followings: The battery peak currents by proposed predictive control strategy are reduced by 26.32%, 28.21% and 27.12% compared with that the conventional control strategy without prediction under the UDDS, SC03 and NEDC three driving cycles. The battery voltage drops by proposed predictive control strategy are reduced by 28.57%, 16.67% and 20% compared with that the conventional control strategy without prediction under the UDDS, SC03 and NEDC three driving cycles. The battery energies by proposed predictive control strategy are saved by 10%, 40% and 36.36% compared with that the conventional control strategy without prediction under the UDDS, SC03 and NEDC three driving cycles.
Future work could test the proposed energy management control under the higher power rating experimental platform for validating the effectiveness of the proposed predictive control strategy.