
Abstract
In this paper, a water wave optimization (WWO) algorithm is proposed to solve the autonomous underwater vehicle (AUV) path planning problem to obtain an optimal or near-optimal path in the marine environment. Path planning is a prerequisite for the realization of submarine reconnaissance, surveillance, combat and other underwater tasks. The WWO algorithm based on shallow wave theory is a novel evolutionary algorithm that mimics wave motions containing propagation, refraction and breaking to obtain the global optimization solution. The WWO algorithm not only avoids jumps out of the local optimum and premature convergence but also has a faster convergence speed and higher calculation accuracy. To verify the effectiveness and feasibility, the WWO algorithm is applied to solve the randomly generated threat areas and generated fixed threat areas. Compared with other algorithms, the WWO algorithm can effectively balance exploration and exploitation to avoid threat areas and reach the intended target with minimum fuel costs. The experimental results demonstrate that the WWO algorithm has better optimization performance and is robust.
Keywords
Introduction
Due to the continuous advancement and development of science and technology, the discovery and exploitation of marine resources has become increasingly important. As effective pieces of marine equipment, AUVs have been widely used to solve certain problems, such as marine hydrographic survey and mine detection, military investigation and rescue, undersea inspection and data collection, ocean exploration, anti-submarine, drilling support, subsea construction, and underwater equipment laying and maintenance. AUV path planning is the process of determining an optimal path from the starting point to the target point under certain specific constraints [1–4]. AUV path planning is not only a manifestation of autonomy and intelligence but also a guarantee of safety and reliability. AUV can effectively avoid all threat areas to obtain an optimal or near-optimal path according to autonomous navigation and obstacle avoidance capabilities. The core concept of AUV path planning is to find the shortest path that satisfies a series of constrains under the premise of comprehensively considering factors, such as fuel consumption, threat level, threat area and navigation area. In recent years, some meta-heuristic optimization algorithms have been used to solve the path planning problems, such as artificial bee colony (ABC) [5], flower pollination algorithm (FPA) [6], bat algorithm (BA) [7], particle swarm optimization (PSO) [8], and moth-flame optimization algorithm (MFO) [9].
Zhuang et al. designed a two-stage cooperative path planner for multiple autonomous underwater vehicles operating in a dynamic environment. The proposed method is capable of reacting quickly to a dynamic ocean environment and can successfully avoid collisions [10]. Lim et al. proposed the method of using selectively hybridized particle swarm optimization algorithms to solve constrained path planning of autonomous underwater vehicles. The method had a low computational requirement and an excellent solution quality, so that the proposed is effective and feasible to obtain the optimal path from the starting point to the target point [11]. Wu tried to solve the coordinated path planning for an unmanned aerial-aquatic vehicle and an autonomous underwater vehicle in an underwater target strike mission. The coordinated path derived from the proposed method is close to the optimal solution in theory [12]. Barua et al. described the algorithms for guidance and control of an autonomous underwater vehicle for a specific identification mission. Their approach obtained better optimization results and the optimal or near-optimal path [13]. Taheri et al. applied a closed-loop rapidly exploring random tree algorithm to solve the path planning problem of an autonomous underwater vehicle, which provided a feasible planned path [14]. Pi et al. provided a search-based motion planning algorithm applied to the coordinated manipulation problem of a dual-arm intervention AUV [15]. Li et al. introduced an autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation to avoid problem areas, and the proposed method had higher matching accuracy and lower time consumption [16]. Ding et al. demonstrated the optimal anti-submarine search path of an AUV by maximizing the cumulative detection probability. The optimal path was effective and suggestive for anti-submarine operation [17]. Lin et al. conducted a study on multiobjective particle swarm optimization for the AUV route planning problem, and the proposed method required less sailing time and energy consumption [18]. Zeng et al. designed a quantum-behaved particle swarm optimization algorithm to solve the optimal path planning problem of an AUV, and their proposed method obtained the best path [19]. Khan et al. presented a protocol that utilized AUVs to save energy wasted by sensor nodes during clustering [20]. MahmoudZadeh et al. applied evolutionary algorithms to solve the path planning problem. The proposed algorithms generated an optimal and collision-free path to avoid obstacles [21]. Gan et al. adopted the quantum-behaved particle swarm optimization algorithm to solve the dynamic trajectory tracking problem for AUVs, where the proposed method balanced exploration and exploitation to obtain a global optimal solution [22]. Zhu et al. showed a biologically inspired self-organizing map algorithm to achieve task assignment and path planning of an AUV system, and the effectiveness and feasibility of the algorithm were verified [23]. Wang et al. utilized the improved gray wolf optimizer to solve the monitoring trajectory optimization problem for USVs, and found that the proposed algorithm consumed minimal energy and exhibited obstacle avoidance [24]. Zhou et al. designed an improved flower pollination algorithm to solve the UUV path planning problem, the proposed method obtain the optimal or near-optimal path [25].
The WWO algorithm based on shallow wave theory simulates propagation, refraction and breaking to perform global optimization [26]. The WWO algorithm accelerates convergence speed and improves calculation accuracy. The WWO algorithm has strong stability and robustness. The WWO algorithm is applied to solve the AUV path planning problem, which not only expands the search space to avoid falling into the local optimum but also balances the global search ability and the local search ability to obtain the optimal solution. The experiments show that the convergence speed and calculation accuracy of the WWO algorithm are better than those of other algorithms, and the WWO algorithm is an effective and feasible method for solving the AUV path planning problem.
This article is divided into following sections. Section 2 introduces the problem description and formulation. Section 3 reviews the WWO algorithm. The experimental results and analysis are provided in Section 4. Finally, conclusions are drawn and future research is proposed in Section 5.
Problem description and formulation
An AUV system principally contains two main propellers, four auxiliary thrusters, a horizontal rudder and a vertical rudder. The two main propellers provide navigation power (surge) and are installed at the stern of the vehicle. Two of the auxiliary thrusters provide sway power and yaw momentums and are installed on a transverse layout, and the other two auxiliary thrusters provide power for heave and moments for pitching and are installed on a vertical layout. The horizontal rudder and vertical rudder are used to change the heading angle of the horizontal direction and vertical direction, respectively. Therefore, surge, sway, heave, pitch and yaw are controllable while roll is not.
The North-East-Down (NED) coordinate and body-fixed coordinate is given in Fig. 1. The NED coordinate is used to describe the position information of the AUV. The coordinate origin O E is a random point at sea lavel; the ξ axis is always horizontal and pointing to the north, the η axis is kept perpendicular to the ξ axis and points to the east, and the ζ axis is kept perpendicular to the ζη plane and points to the center of the Earth. The coordinate origin O B is used as the original coordinate point of the AUV, the x axis points to the bow along the longitudinal section, the y axis is perpendicular to the longitudinal section and points to the right chord, and the z axis points to the bottom of the boat along the longitudinal section. To determine the mutual correspondence between the NED coordinate and the body-fixed coordinate, the kinematic model of AUV is as follows:
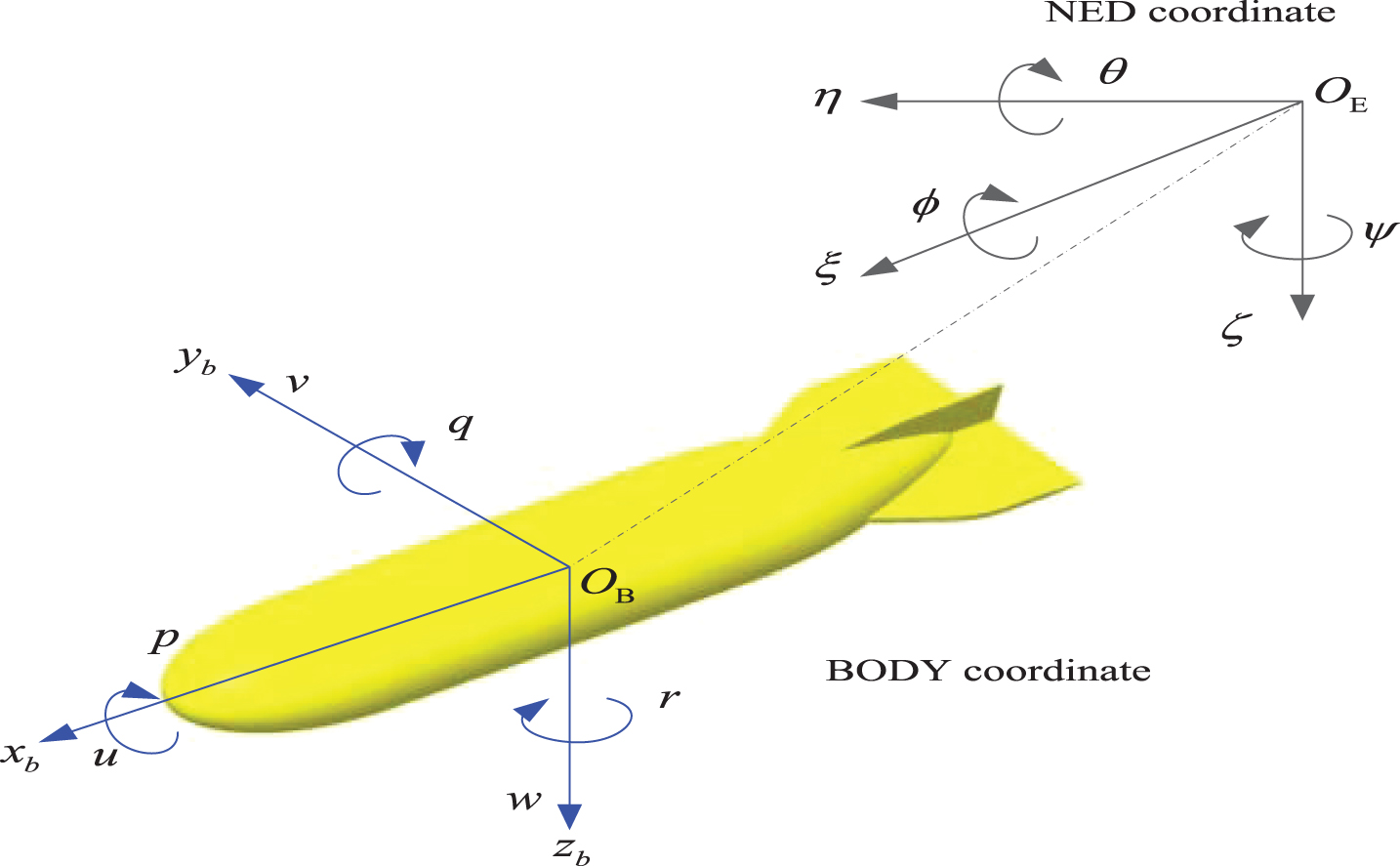
Earth-inertial frames and body-fixed reference frames.
Assuming that the roll movement is uncontrollable and the structure of AUV is bilaterally symmetrical, take w = 0, v = 0, and we rearrange to obtain
As an active sonar, the forward looking sonar (FLS) is necessary for AUV safe navigation. FLS not only detects and perceives information about the environment surrounding an AUV but also identifies threat areas and sends out danger signals, which is beneficial for an AUV to successfully avoid threat areas and reach the target point safely. FLS based on the characteristics of sound waves propagating in water is used to complete underwater target detection and underwater communication through signal conversion and processing. FLS uses discrete data points to output and save data for detecting underwater obstacles. During the navigation of the AUV, the FLS is used to perceive the underwater road conditions. The data of the detected obstacles uses the sonar position as a reference point to effectively process more stored echo information.
For distributed threat areas, the goal of AUV path planning is to obtain an optimal or near-optimal path under certain constraints. The transformation of the coordinate system is given in Fig. 2.

Transformation of the coordinates system.
The coordinate system O
xy
is transformed to the coordinate system Ox′y′. The positive direction of the horizontal axis is the line from the starting point to the target point. The transformation relationships can be defined as:
Threat cost J
t
and fuel cost J
f
are main evaluation criteria for AUV path planning, and the calculation formulas can be defined as:

Model of the AUV threat cost.
If the distance between the threat point and the end of the subsegment is less than the radius of the threat area, the threat cost of a subsegment can be defined as:
where N
t
denotes the number of the threat regions, L
i
denotes the length of ith segment, d0.1,i,k denotes a distance from 1/10 point on the ithsegment to the kth threat center. Assuming that the speed of AUV is constant, the fuel cost J
f
denotes proportional to the path length. The total cost of the path planning can be defined as:
The WWO algorithm mainly simulates wave motions including propagation, refraction and breaking for effective searching. The process of wave movement is from deep regions to shallow regions. For a wave object, wave height h and wavelength λ are two important attributes, and the fitness value varies with the unevenness of the seabed. In deep regions, a wave obtains lower fitness value, lower wave height, and longer wavelength. In shallow regions, the wave obtains higher fitness value, higher wave height, and shorter wavelength, as illustrated in Fig. 4. The correspondence between problem space and population space is given in Table 1.
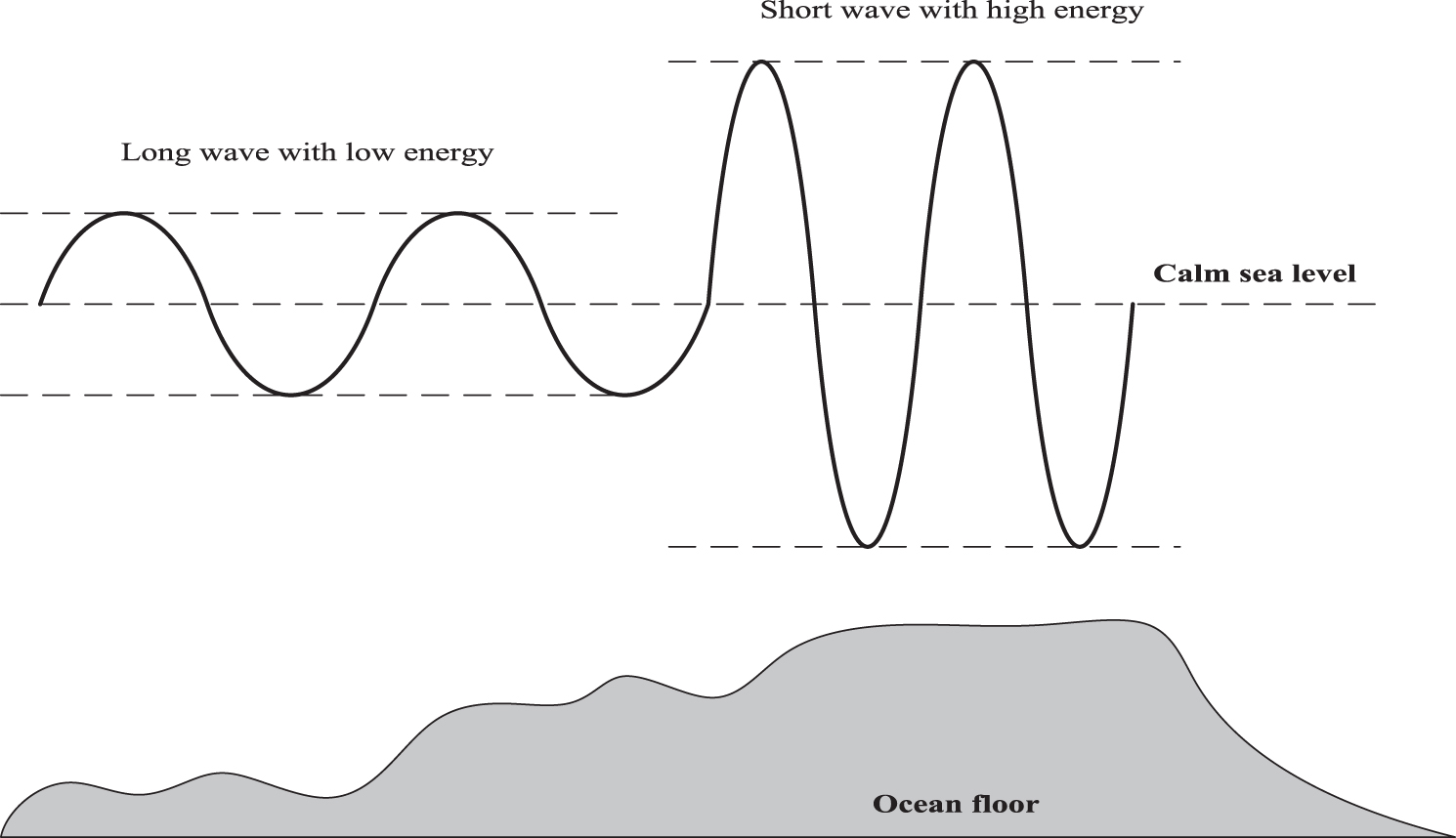
Different wave shapes in deep and shallow water.
Correspondence between problem space and population space
Each wave performs a propagation operation and generates a new wave x′. The new location update can be defined as:
If the location of wave x is not ameliorated after many propagations, wave height decays to zero. The wave will perform refraction to avoid search stagnation. The location update can be defined as:
As the energy of water wave continues to increase, the wave crest will continue to steepen. When the velocity of the wave crest exceeds the propagation velocity of the water wave, the wave will break up into a series of solitary waves. In the WWO algorithm, the optimal wave x* is used to perform breaking operations. The specific way is to randomly select k dimensions from D, and selecting each dimension creates solitary waves. The updated location can be defined as:
In general, the propagation operation modulates the fitness values of different regions to effectively balance exploration and exploitation; the refraction operation removes the exhausted wave from the population and obtains the optimal wave, which can avoid search stagnation and accelerate convergence speed; and the breaking operation enhances the intensive search near the optimal solution and improves calculation accuracy. These three operations provide a good search mechanism for the WWO algorithm to obtain the global optimal solution. The correspondence between AUV path planning and the WWO algorithm is given in Table 2. For the swarm intelligence optimization algorithm, the search process and optimization process simulate the evolution and foraging process of individuals, the points in the search space simulate individuals in nature, the objective function of the problem is analogous to the individual’s ability to adapt to the environment, and the individual foraging process or the survival of the fittest is analogous to the iterative process of replacing the less feasible solutions with more feasible solutions in the search and optimization process. The solution procedure of the AUV path planning problem is given in Table 3. The solution methodology flow chart of the AUV path planning problem is provided in Fig. 5.
The correspondence between the AUV path planning and the WWO algorithm
The solution procedure of the AUV path planning problem

Solution methodology flow chart of AUV path planning.
To verify effectiveness and feasibility, the WWO algorithm was applied to solve the randomly generated threat areas and generated fixed threat areas. The WWO algorithm has faster convergence speed and higher calculation accuracy, so that it can effectively obtain an optimal or near-optimal path in solving the path planning problem. The numerical experiment is set up on a computer with an Intel Core i7-8750 H 2.2 GHz CPU, a GTX1060, and 8 GB memory running on Windows 10.
Simulation experiments of AUV path planning in random threat areas
The AUV sails in the deep sea, and the threat regions encountered are randomly distributed. The generated threat regions are as follows:
Threat point coordinates:
The threat radius:
Threat coefficient:
The starting point coordinates and the target point coordinates are:
In this section, the WWO algorithm is used to solve the randomly generated threat areas, and the number of the threat points is 6. Since comparison experiments cannot be performed, the simulation tests of the WWO algorithm is 5. The population size is 20, the maximum number of iterations is 200, and the dimension of the problem is 14. Table 4 gives some relevant parameters about threat center, threat radius and threat level. The starting point and the target point coordinates are given in Table 5. The experimental results for random threat areas are given in Table 6.
A randomly generated parameter table with six threat points
The starting point and the target point coordinates
Experimental results for random threat areas
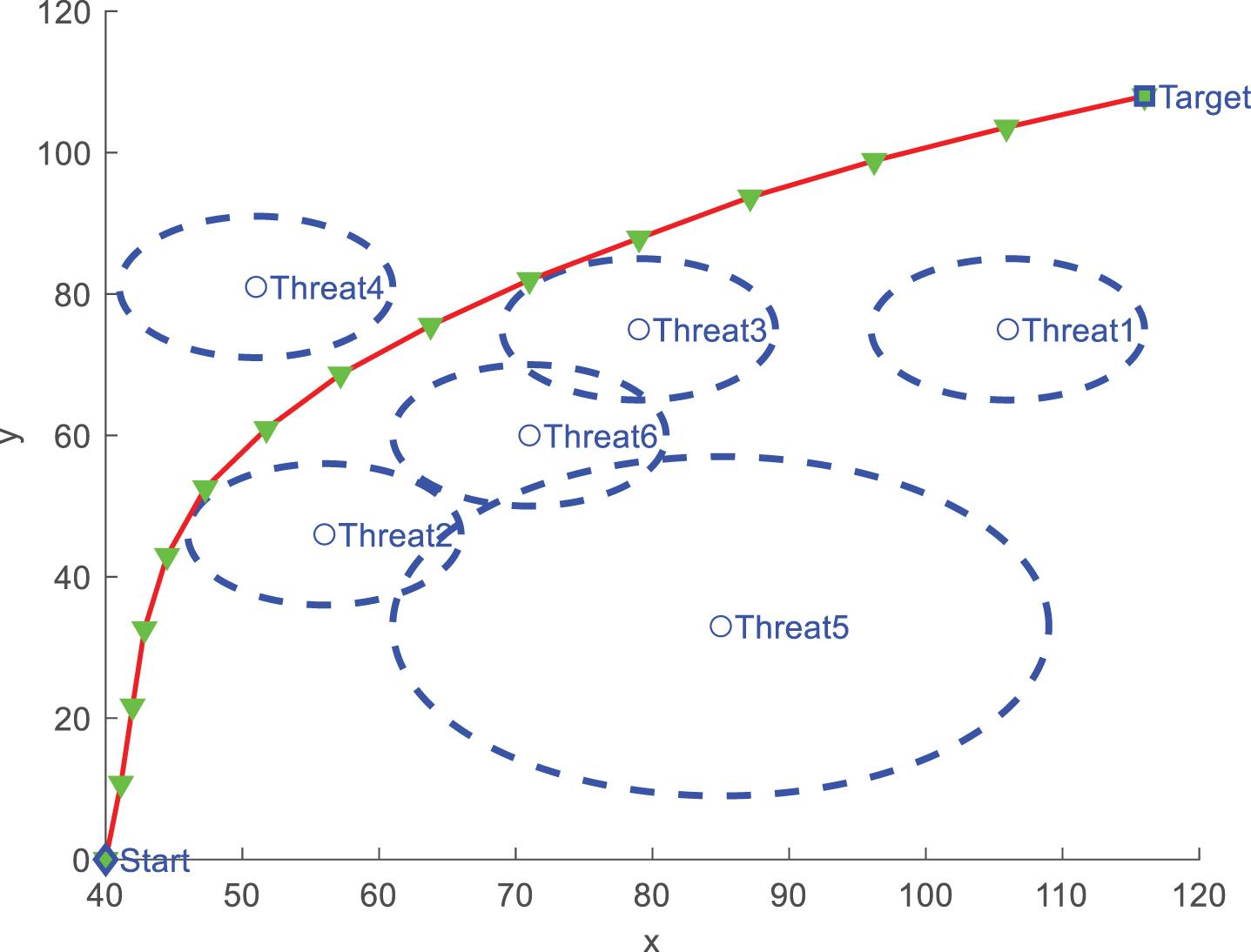
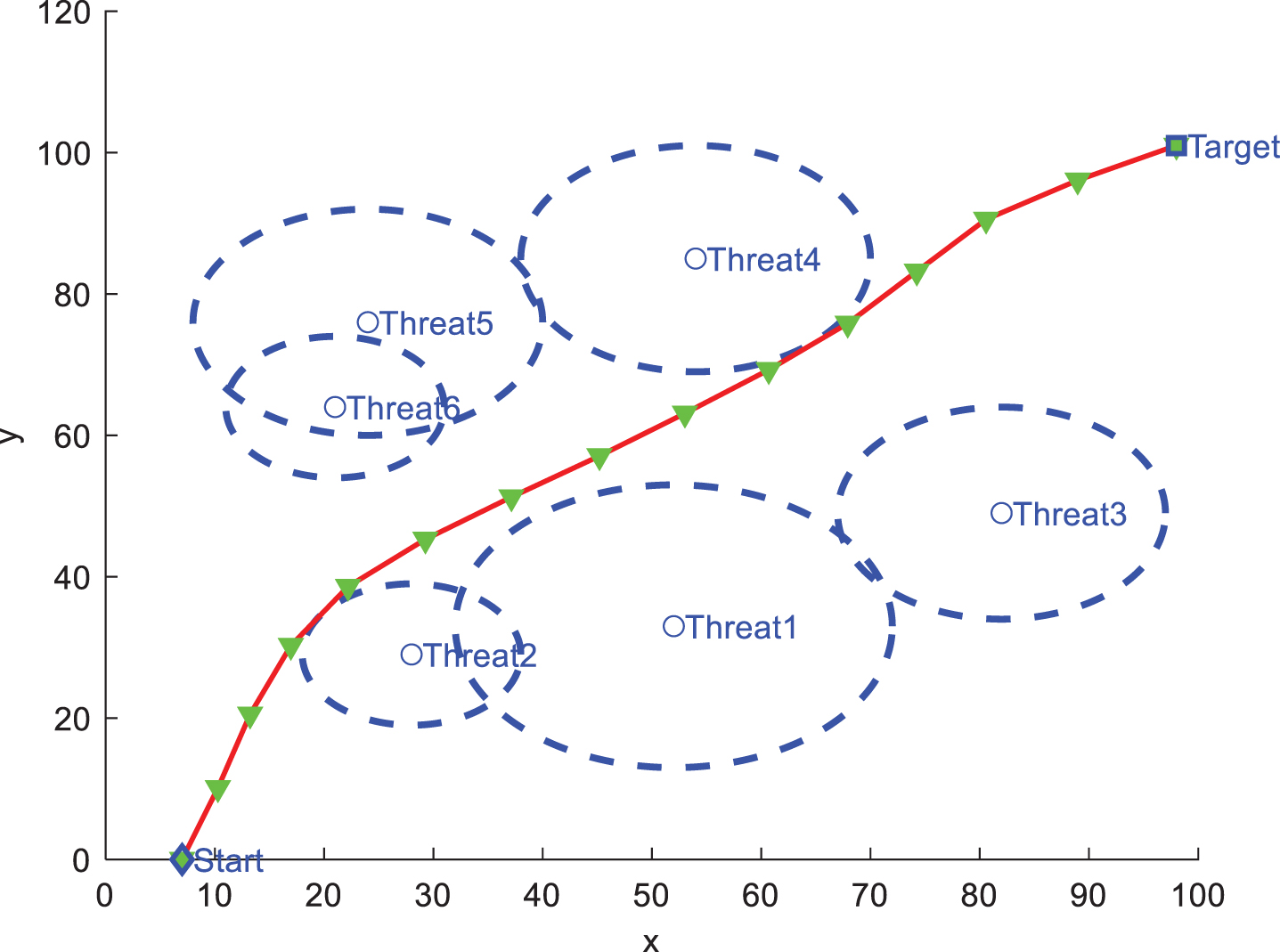
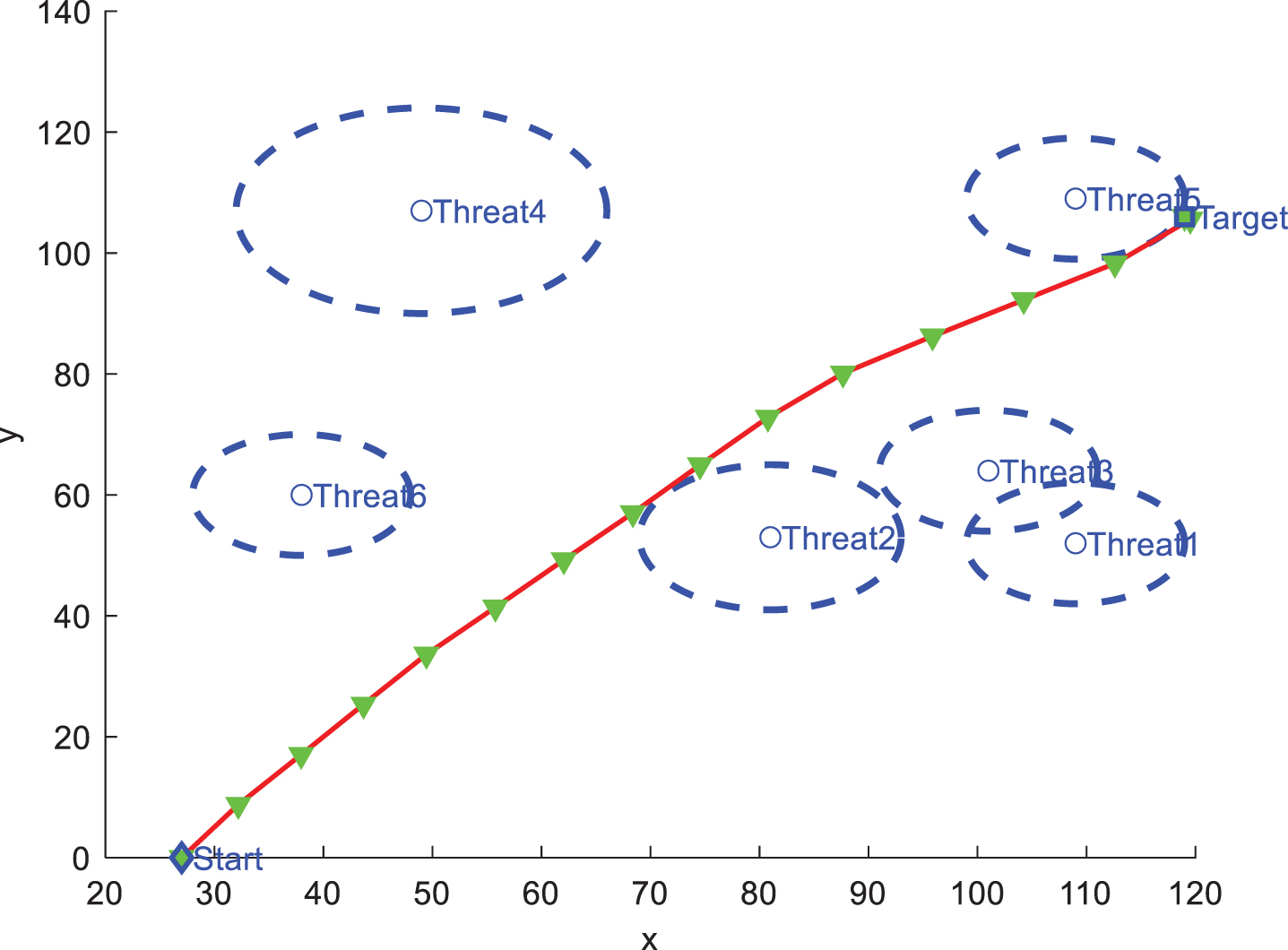
For five randomly generated threat areas, we conducted five independent experiments on AUV path planning. Figures 6–10 are the effect diagrams of the path. The WWO algorithm can effectively avoid the threat areas and obtain an optimal path from the starting point to the target point in response to randomly generated threat regions. Figure 11 gives the convergence graph of five independent experiments, which indicates that the WWO algorithm has a faster convergence speed in path planning. Since the randomly generated threat regions are different, the optimal path obtained will be different. The WWO algorithm cannot be compared with other optimization algorithms due to different threat regions. Therefore, we select three sets of fixed threat regions for AUV path planning in the following section.
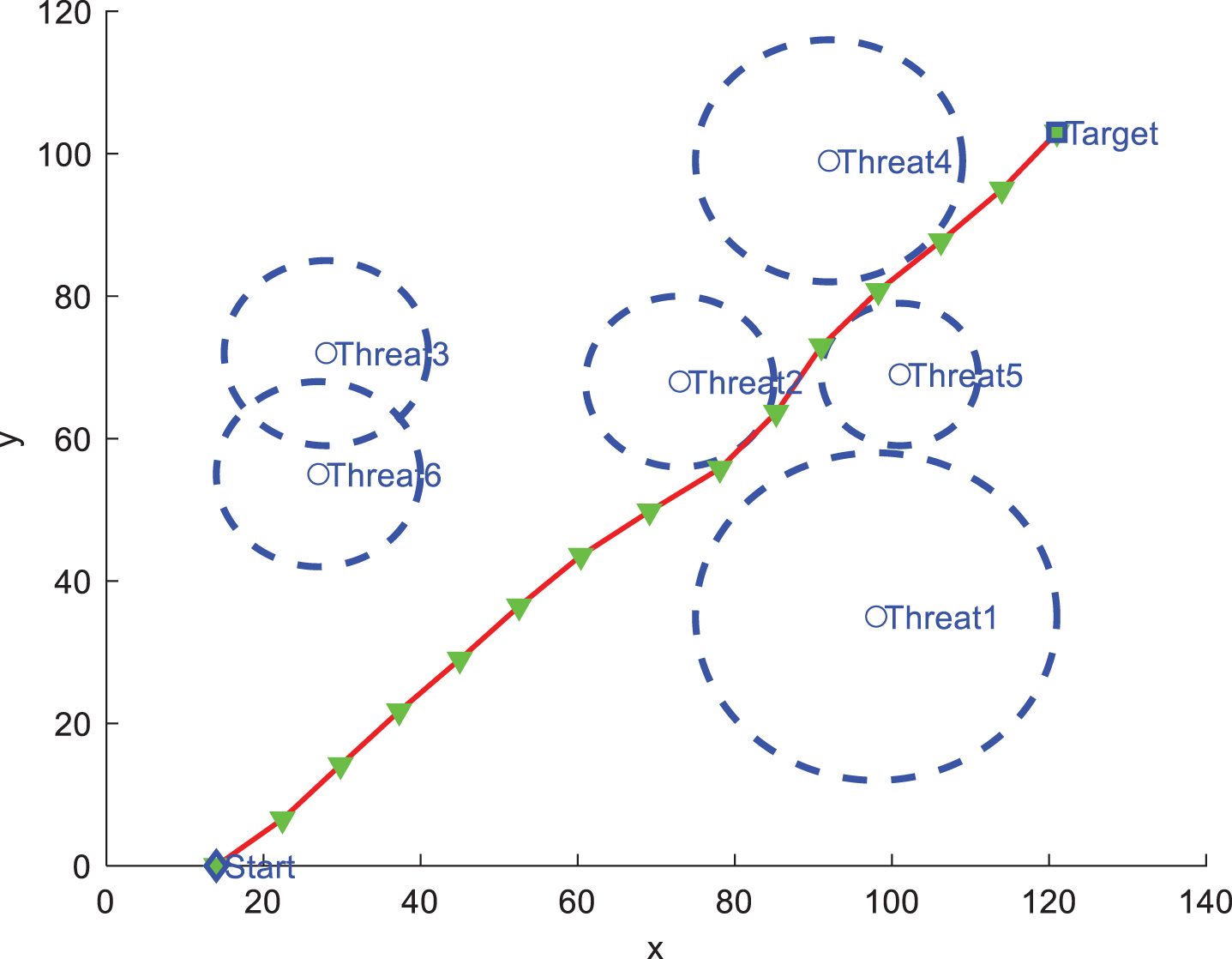
The path planning result using WWO, D = 14.
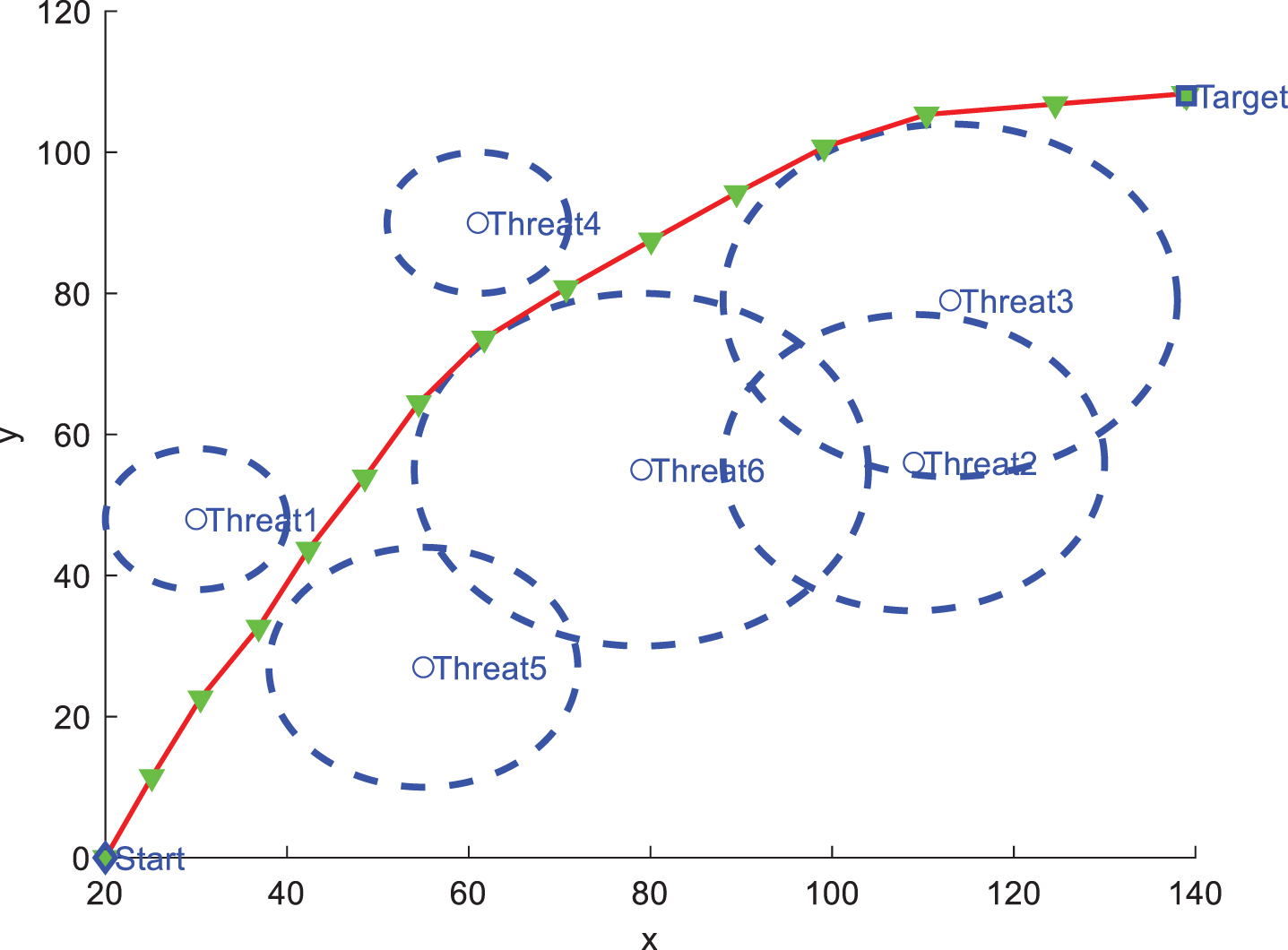
The path planning result using WWO, D = 14.
The path planning result using WWO, D = 14.
The path planning result using WWO, D = 14.
The path planning result using WWO, D = 14.
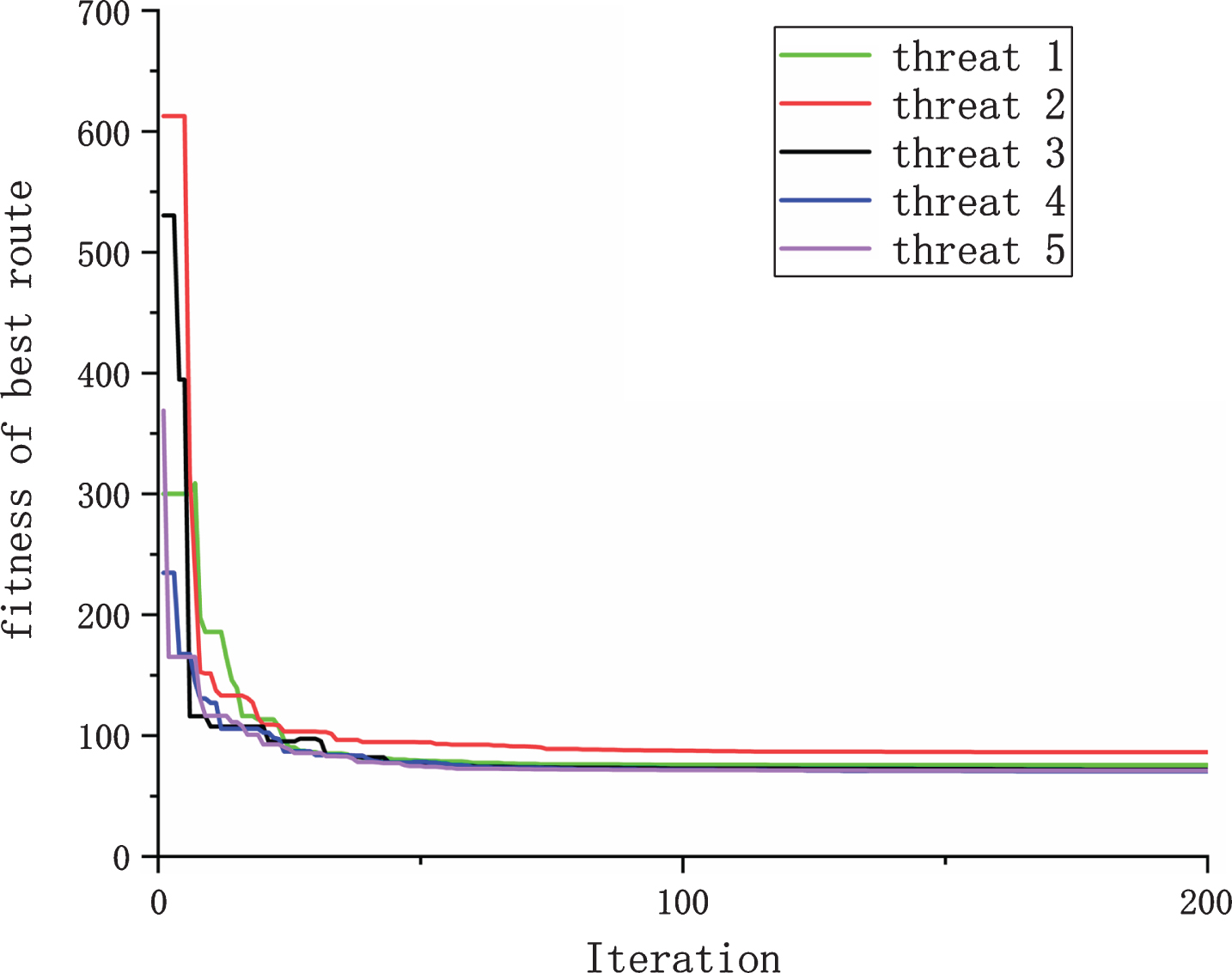
The evolution curves of fitness values, D = 14.
To test the performance of the WWO algorithm for solving AUV path planning problems, the WWO algorithm was compared with other intelligent optimization algorithms, including ABC, FPA, BA, PSO and MFO. The population size was 20, the maximum number of iterations was 200, and the number of independent runs was 20. Best, Worst, Mean and Std. represented the optimal value, the worst value, the mean value and the standard deviation. The parameters of all algorithms were empirical values and these parameters were derived from the original algorithm. The initial parameters of all algorithms are given in Table 7.
Initial parameters of all algorithms
Initial parameters of all algorithms
Eight threat regions were used to verify the effectiveness of the WWO algorithm, and the starting point coordinates and target point coordinates were (0,0) and (100,100). Tables 8 and 9 give information on fixed threat regions and experimental results, respectively. The smallest standard deviation is shown in bold. The dimension was 10, the standard deviation of the WWO algorithm was worse than that of ABC and FPA, and the optimal value of WWO was better than that of ABC, FPA, BA and MFO. The dimensions were 15, 20, 25, 50 and 100, the standard deviation of the WWO algorithm was the smallest of all the algorithms, which indicates that WWO has better stability for solving the path planning problem. As the dimension increases, the optimal value, worst value, mean value and standard deviation increased accordingly. Figures 12–14 show that for path planning results, the WWO algorithm can travel along the edge of the threat regions to obtain the shortest optimized path. Figures 15–20 show that the convergence speed and the calculation accuracy of the WWO algorithm are significantly better than other optimization algorithms. Figures 21–26 show a comparison with other algorithms and indicate that the WWO algorithm obtains a smaller standard deviation, which indicates that WWO has higher stability and is more robust. Table 10 lists the results of the p-value Wilcoxon rank-sum [27]. Most of the values are less than 0.05, which indicates that the results are not accidental.
Information of fixed threat regions
Experimental results in different Dim
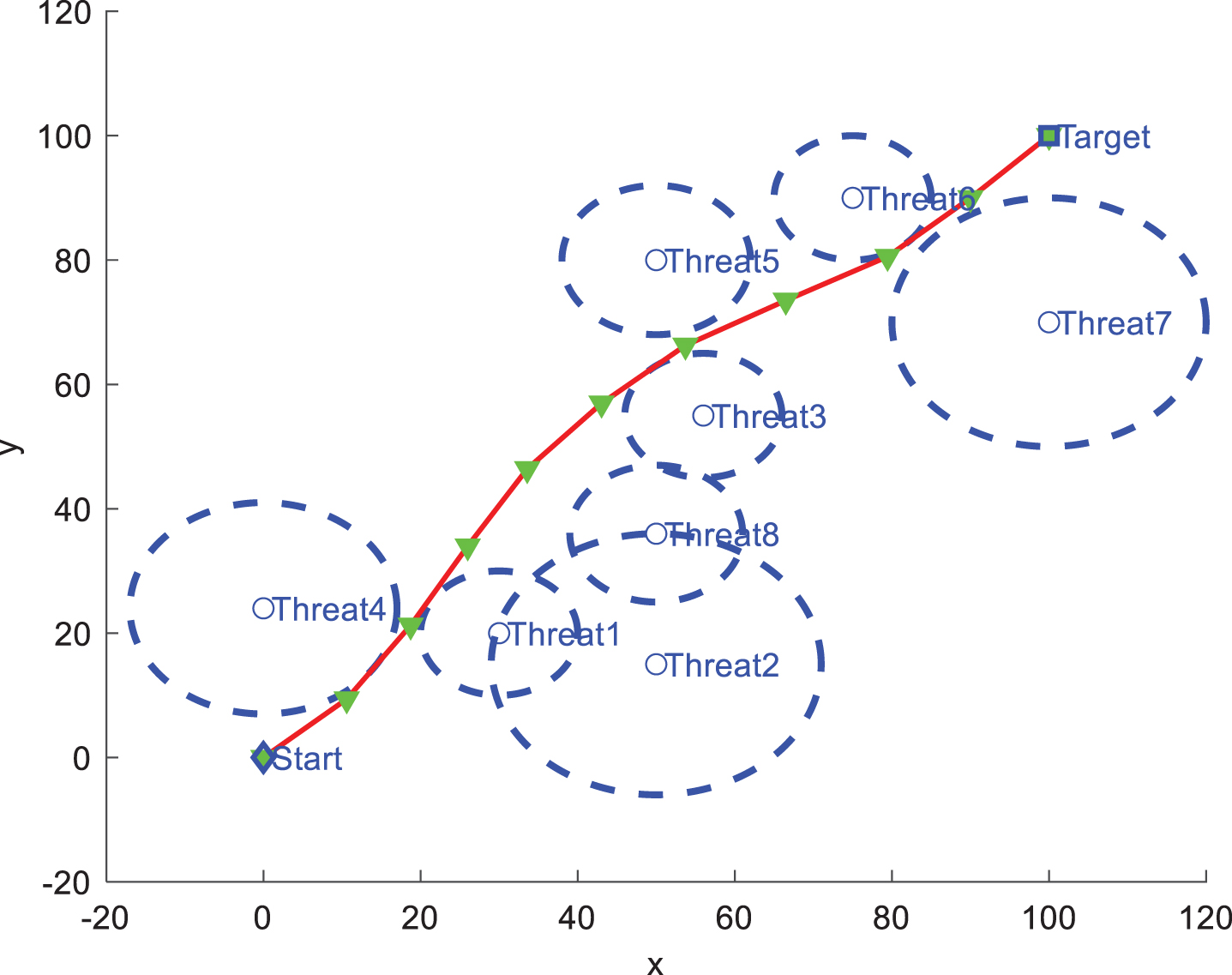
The path planning result using WWO, D = 10.
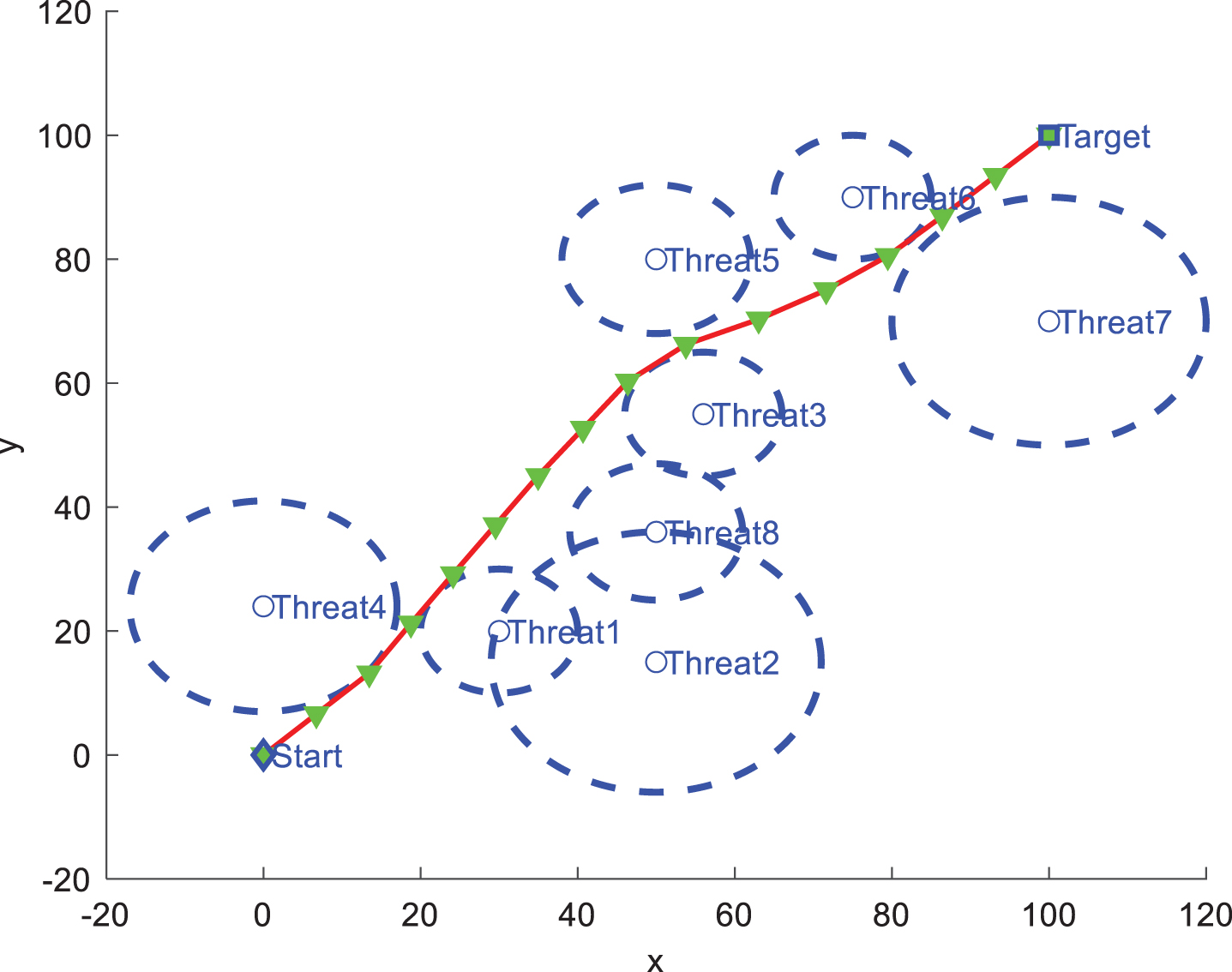
The path planning result using WWO, D = 15.
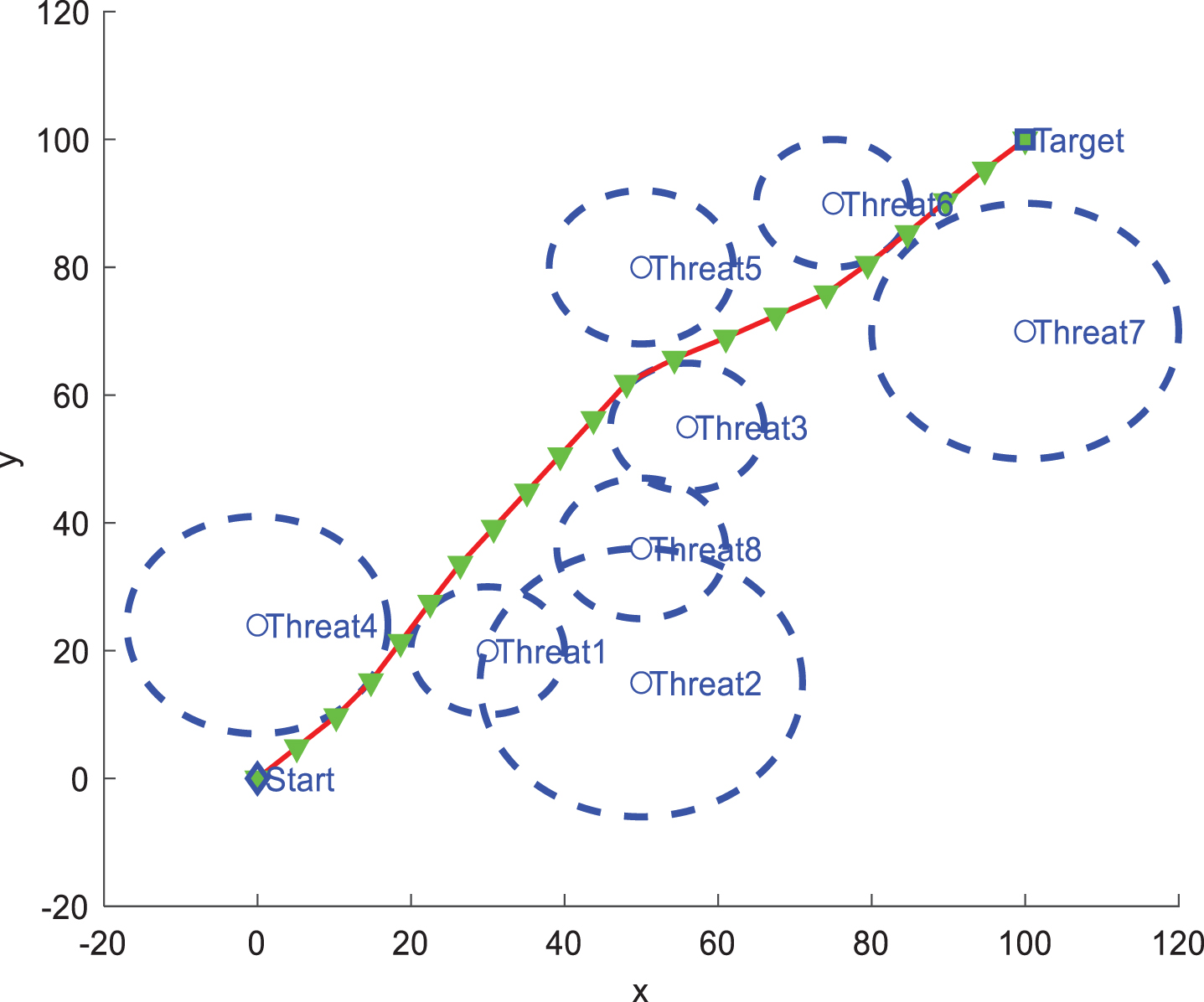
The path planning result using WWO, D = 20.
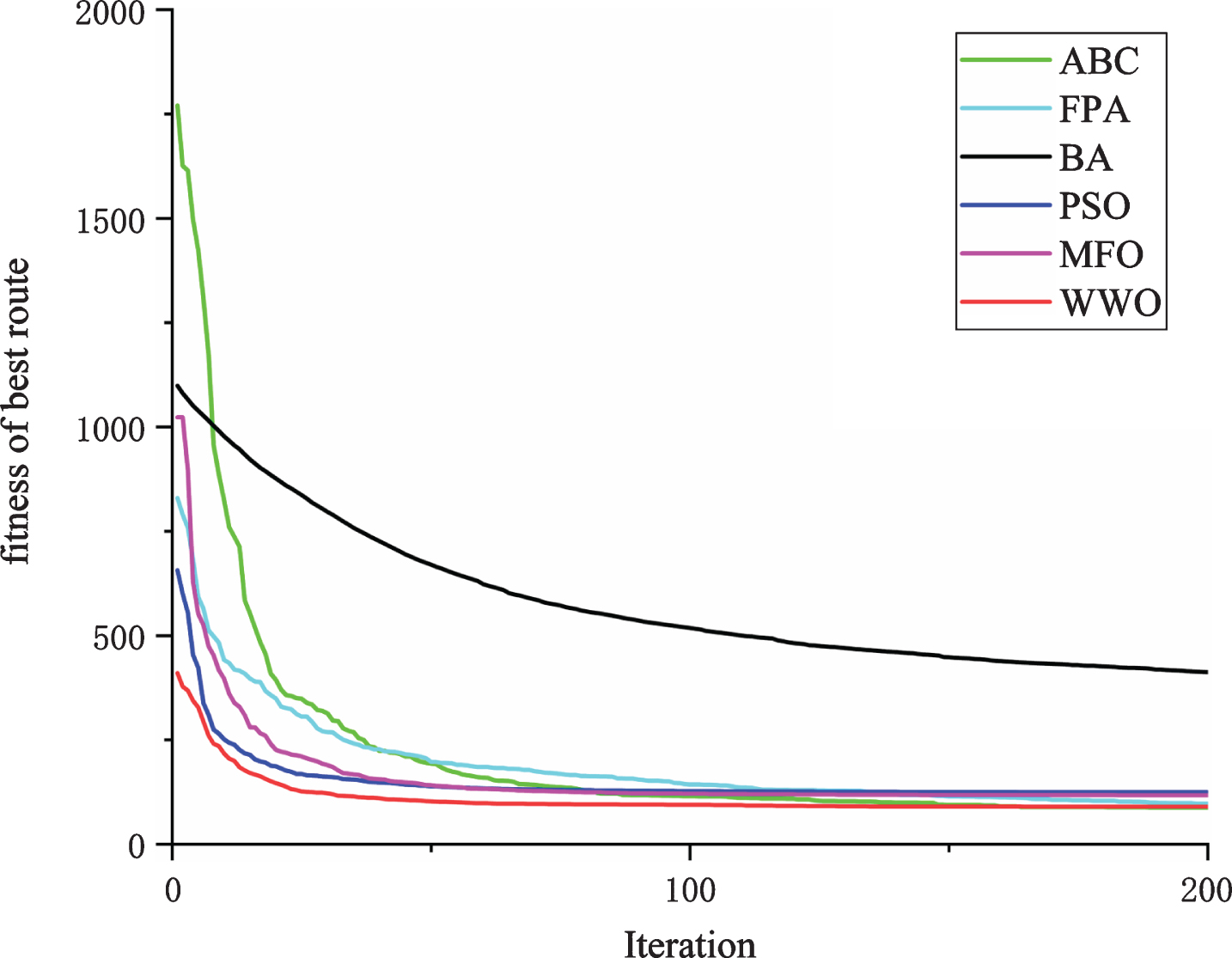
The evolution curves of algorithms, D = 10.
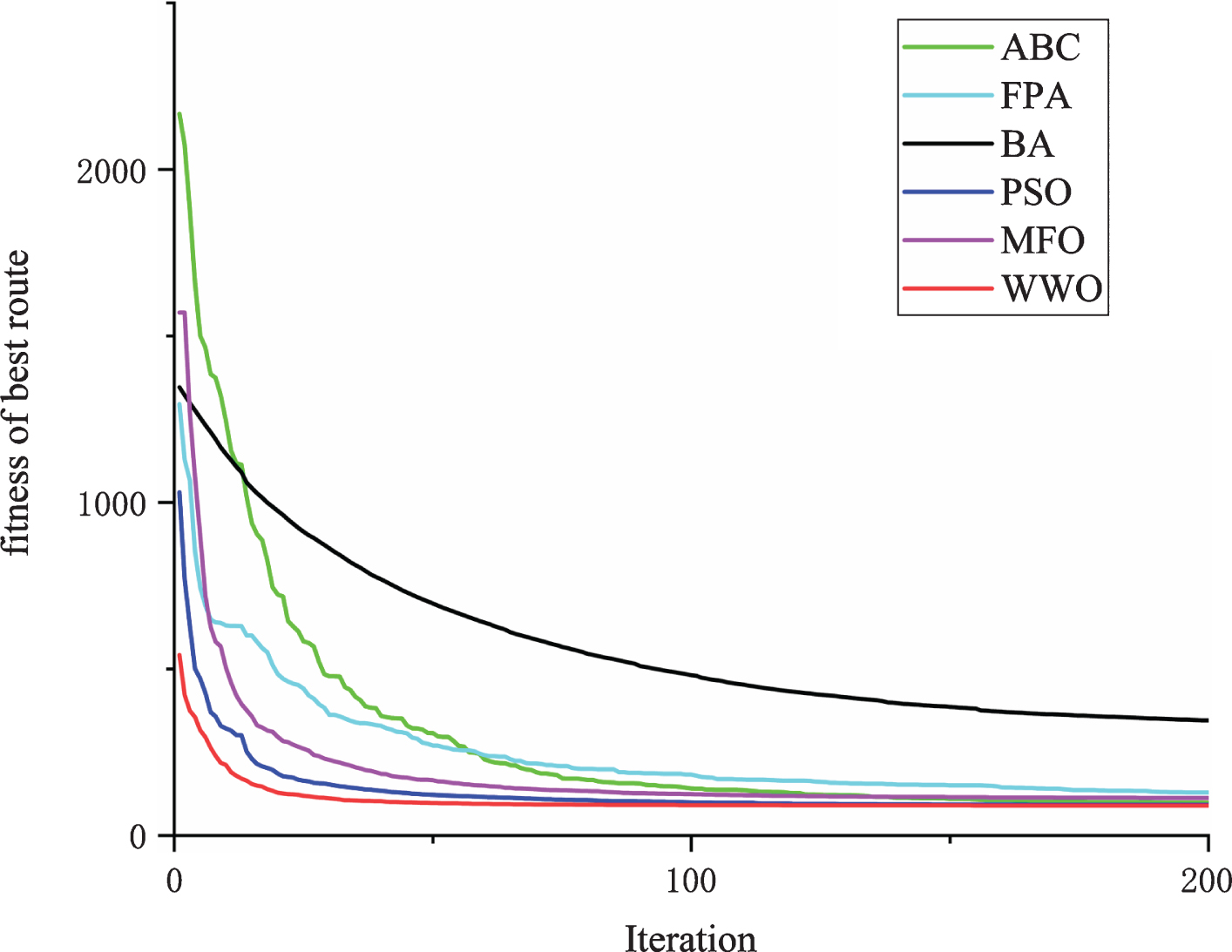
The evolution curves of algorithms, D = 15.
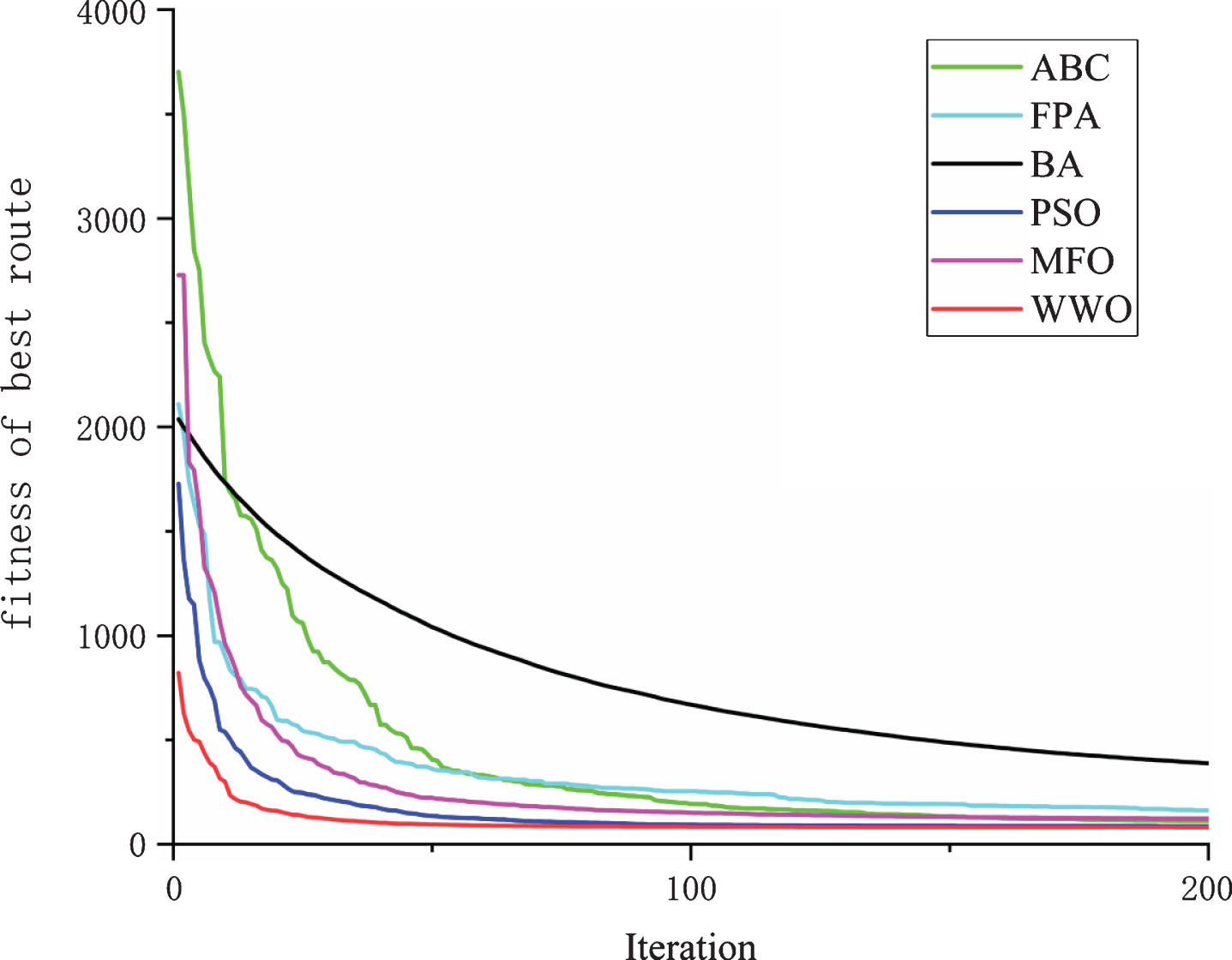
The evolution curves of algorithms, D = 20.
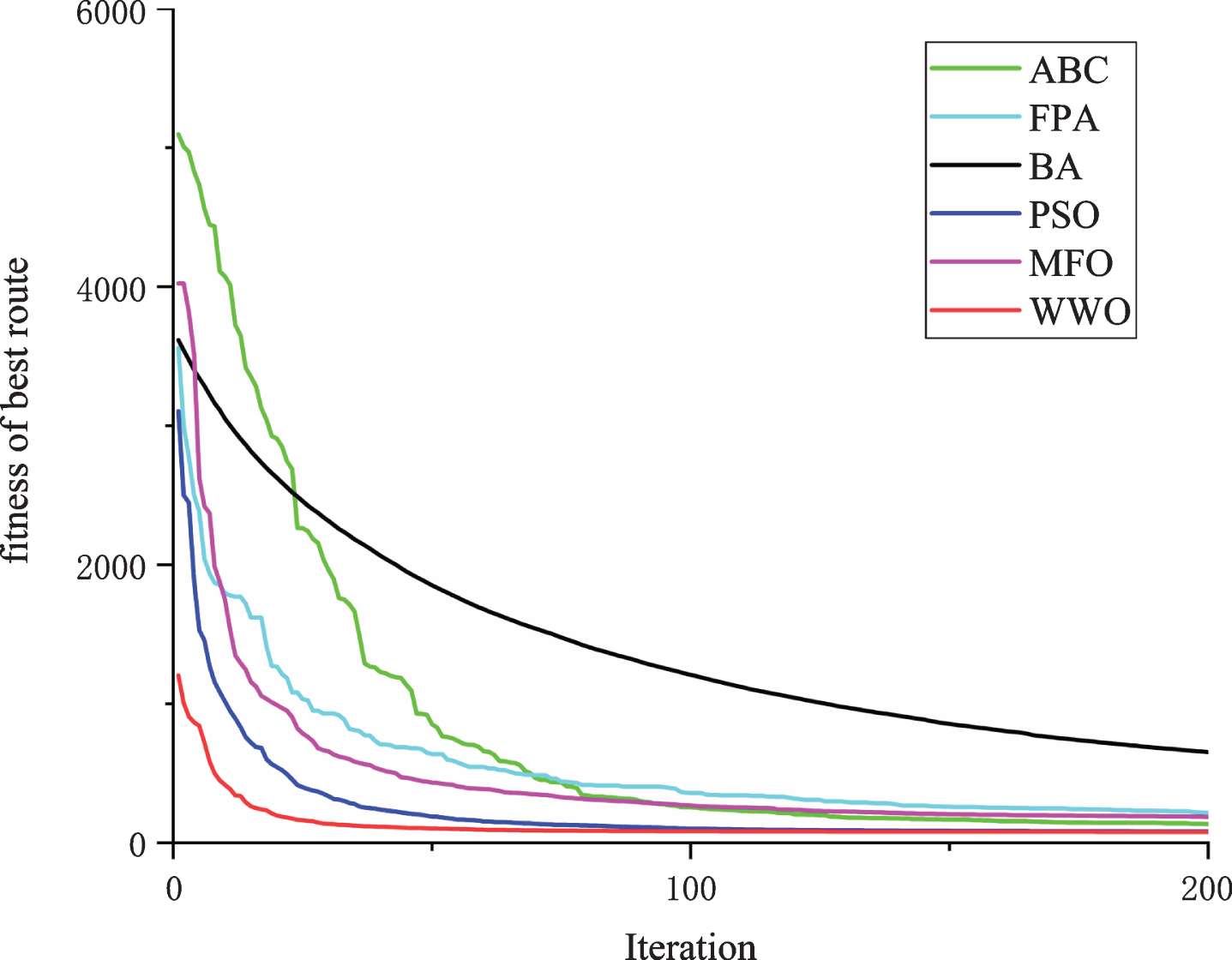
The evolution curves of algorithms, D = 25.
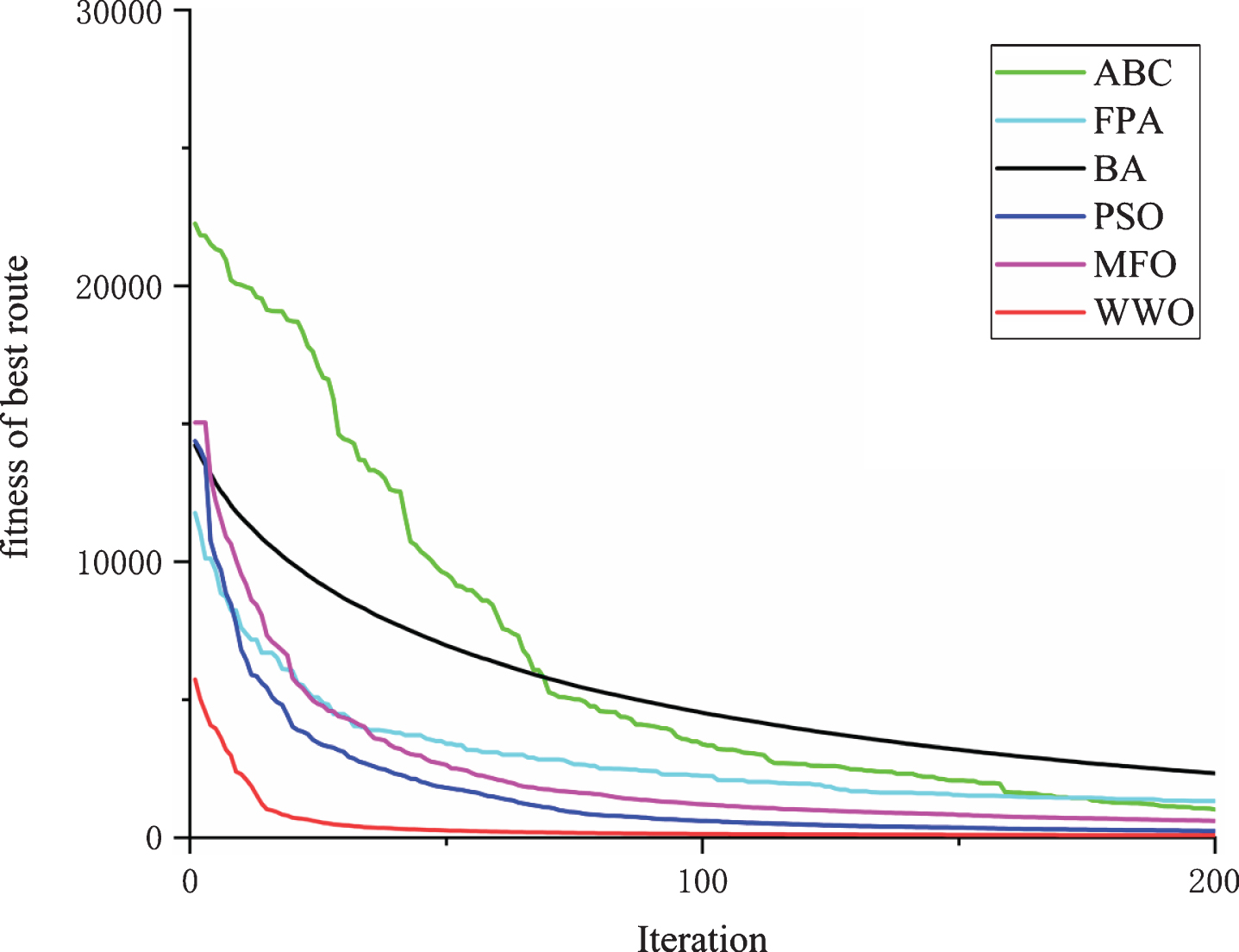
The evolution curves of algorithms, D = 50.

The evolution curves of algorithms, D = 100.
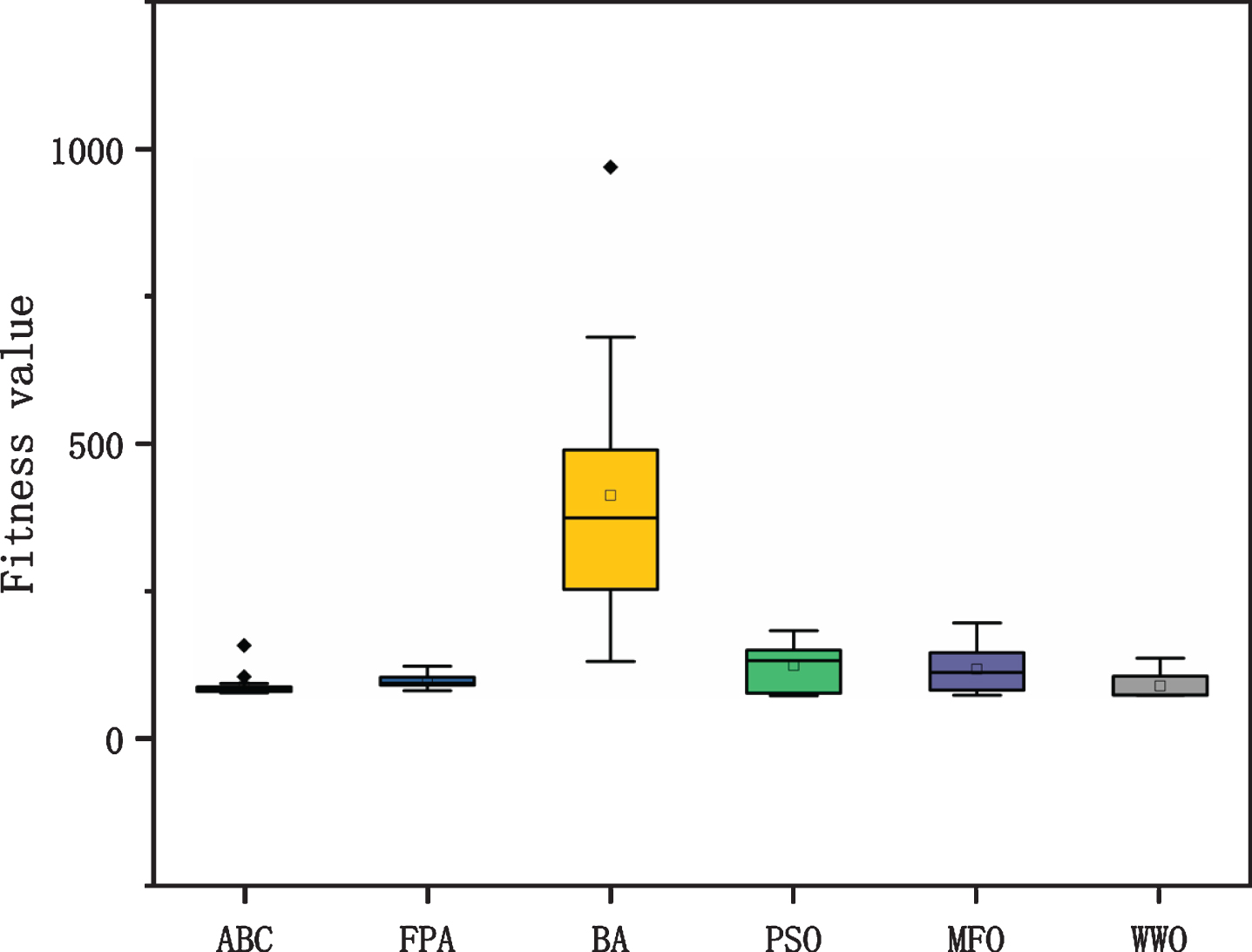
The ANOVA of algorithms, D = 10.
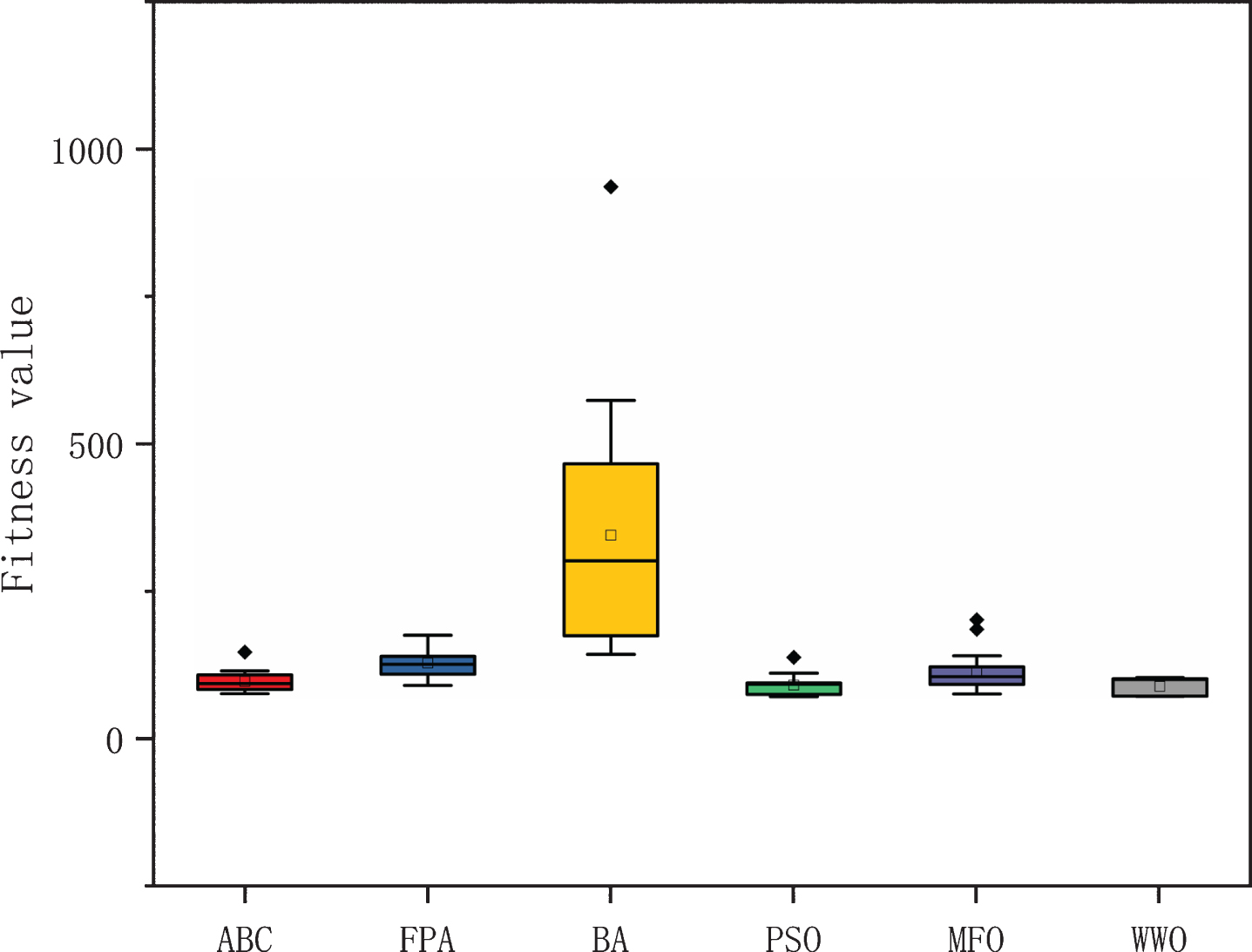
The ANOVA of algorithms, D = 15.
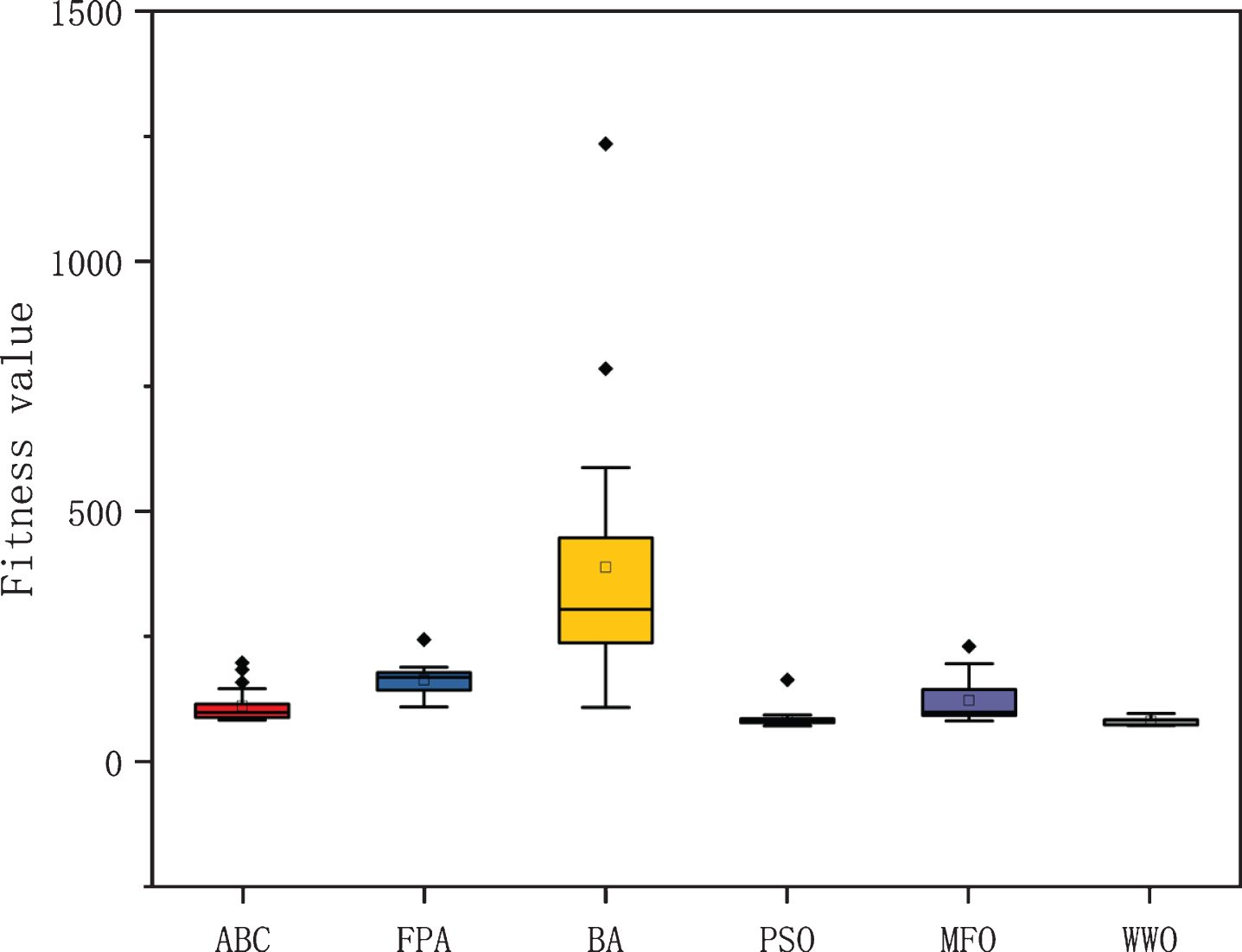
The ANOVA of algorithms, D = 20.

The ANOVA of algorithms, D = 25.
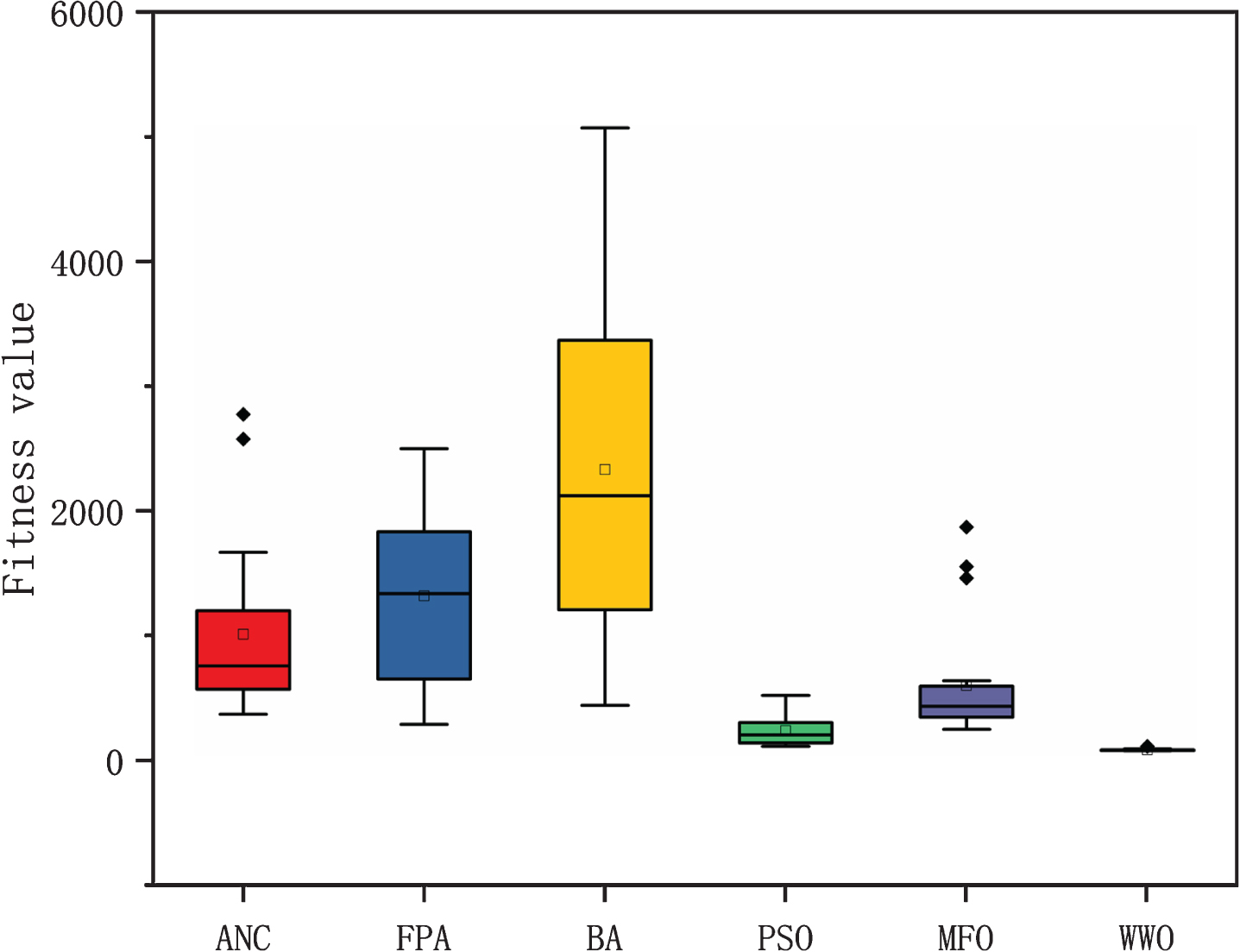
The ANOVA of algorithms, D = 50.
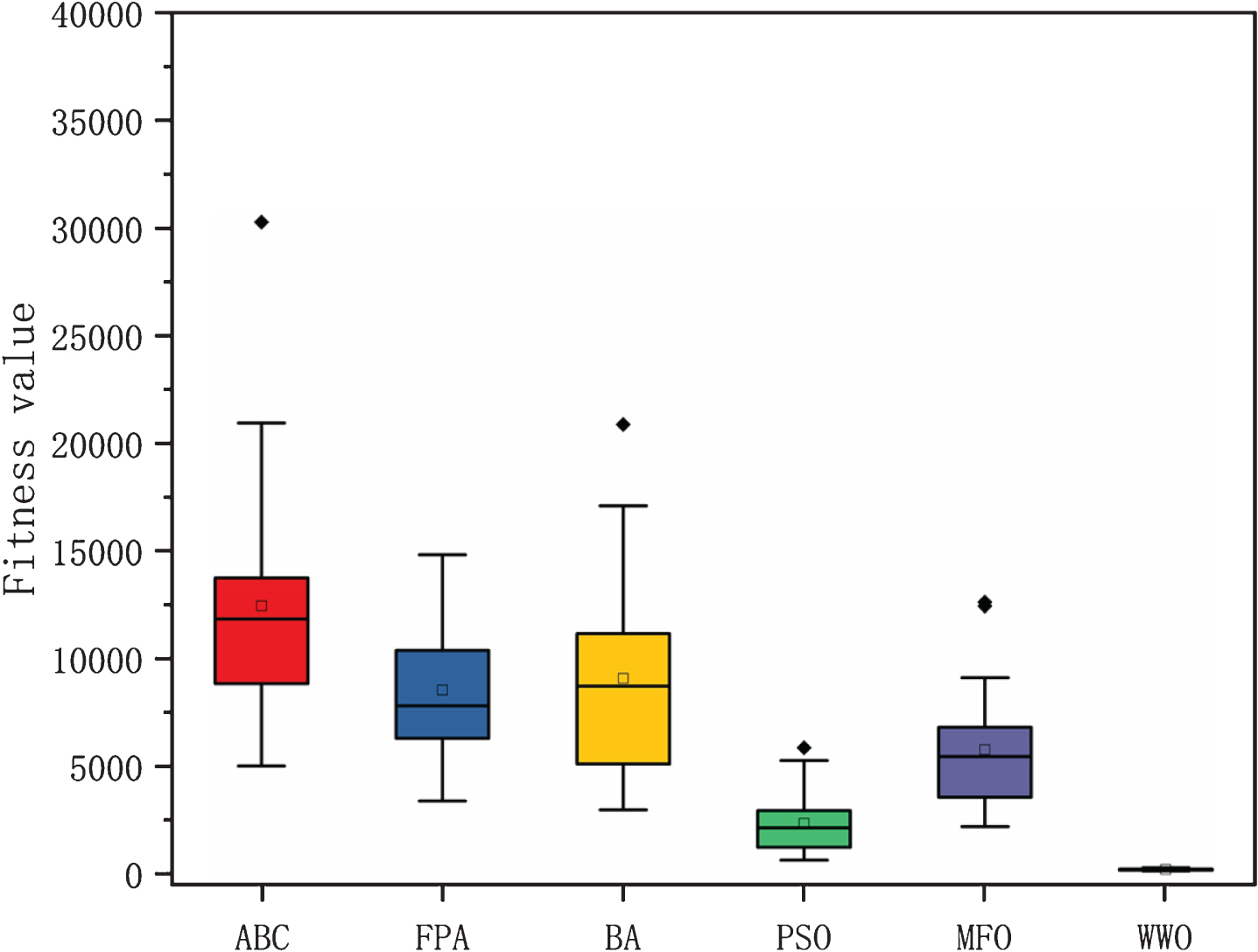
The ANOVA of algorithms, D = 100.
Results of the p-value Wilcoxon rank-sum
In this paper, a novel WWO algorithm is proposed to solve the optimal path planning problem in a complex ocean environment. The generated optimal path ensures that the AUV safely reaches the target point with minimum fuel cost. For randomly generated threat regions, the WWO algorithm can successfully avoid all threat regions and obtain an optimal path from the starting point to the target point. For generated fixed threat regions, the WWO algorithm has faster convergence speed and higher calculation accuracy compared with other intelligent evolutionary algorithms, which can better solve the optimal path planning problem. For these regions, the WWO algorithm can effectively balance exploration and exploitation to avoid all threat regions for obtaining the optimal or near-optimal path under the constraint condition. The experimental comparison shows the stability and superiority of the WWO algorithm over the ABC, FPA, BA, PSO and MFO algorithms, which provides an effective approach to solve the optimal path planning problem.
For future studies, the WWO will be used to solve the path planning problem that generates more threat areas randomly. The WWO algorithm will be applied to solve AUV path replanning in a spatiotemporal ocean environment, cooperative path planning for multiple AUVs, and the three-dimensional optimal path planning problem.
Footnotes
Acknowledgments
This work was partially funded by the National Nature Science Foundation of China under Grant No. 51679057, and partly supported by the Province Science Fund for Distinguished Young Scholars under Grant No. J2016JQ0052.