
Abstract
The identification of nonlinear systems is a complex task. This article presents a method comparison between the new Fuzzy Adaptive Neurons (FAN), Radial Basis Function Network (RBF), and Adaptive Network-Based Fuzzy Inference System (ANFIS). The nonlinear systems presented are solved with stable and optimal learning. The simulation of the results for two models presented, are carried out in Matlab®, the optimization of the system identification for the first and second systems were obtained with great success.
Keywords
Introduction
The identification of systems has required classical (non-fuzzy) and fuzzy methods [1–8]. In particular, fuzzy methods have used fuzzy neural networks (FNNs) with fuzzy inference rules, and learning algorithms such as backpropagation with Sigmoid and Gaussian Activation Functions [9–13].
Fuzzy systems require proper activation functions for systems identification [14]. Usually the models proposed with FNNs, to approximate the nonlinear functions include fuzzy inference rules, however, FNNs with adequate activation functions and learning algorithms are required to successfully solve the precision problems in fuzzy identification of the system.
Fuzzy Adaptive Neurons (FANs) are based on fuzzy logic [9, 15], and the model of fuzzy neurons of Gupta [3–5]. The FAN is a new method because in [16–19] was developed a new Sigmoid Activation Function and a learning algorithm based on error correction. FAN method has been successfully applied at parameter identification based on force and moment data [7], to the neuro-fuzzy design of control law for a PID controller [20, 21], to trajectory tracking control of a multi-rotor unmanned aerial vehicle based on experimental aerodynamic data [22], for earthquake modeling with seismic accelerograms [23], and for recognition and processing of spatiotemporal spike patterns [8, 24].
Membership functions with different shapes, such as triangular, trapezoidal, sigmoidal, bell, Gaussian, among others, have been proposed depending on the application [25].
In [26] presents a fractional fuzzy inference system (FFIS), based on fractional membership functions with fractional indices constant or dynamic. Fractional membership functions are defined by level sets, with applications to predict chaotic time series and a fuzzy closed loop control system. FAN’s sigmoid membership function use a constant or dynamical threshold, based on level sets. The threshold defines the left or lower level set of the somatic aggregation operation fuzzy set.
Applications for parameter identification of dynamic systems with artificial neural networks (ANN) and ANFIS have been proposed in [27], to define parameters of dynamic equations for dynamic and control analysis. Based on input data the ANN and ANFIS to estimate the unknown parameters.
The novel FANs learning algorithm performs system identification in a stable and optimal way [7, 20–24]. This article proposes a method comparison between Radial Basis Function Network (RBF), Adaptive Network-Based Fuzzy Inference System (ANFIS) and FAN. In [23] the modeling is based on axon delays that produce a phase shift at the output with respect to the input of the system, and a new Gaussian activation function (GAF) for fuzzy systems. The methods presented here develop the models with some delayed inputs and delayed feedback outputs.
The article is organized in the following sections, Section 2, describes the FANs model and the learning algorithm, developed in [16–19, 22–24], for fuzzy unipolar and bipolar systems.
Section 3 presents the modeling of two nonlinear systems. The first model is solved based on fuzzy neural modeling with FANs and ANFIS. A second model is developed by four methods with the purpose of comparing the results, using the learning algorithm for error correction for FANs. The first method is sigmoid activation function (SAF-FANs), the second is a Radial Based Function (RBF), the third is through ANFIS, and the fourth method is the learning algorithm of the FANs.
Section 4 presents a comparative analysis between ANFIS and FAN learning algorithms. Also the stability analysis of SAF-FAN model 1 and FAN model 2.
In Section 5 shows the simulation results in Matlab® of two models. Model 1 is a two-dimensional function. Model 2 is nonlinear plant.
Section 6 presents the conclusions and future challenges.
Preliminaries
Different models of fuzzy neurons have been established [3–5, 16–19], here the Fuzzy Adaptive Neurons model is described.
Fuzzy adaptive neurons
A synaptic operation, a somatic Gupta-type aggregation or fuzzy integrator operation, and a nonlinear somatic operation with its learning algorithm for fuzzy systems [16–19, 22–24] conjoin the model of FANs. Synaptic operation, (1), aggregation operation, (2), (3) are the somatic operations.
Fuzzy unipolar systems are within the interval [0,1], then the nonlinear operation with threshold is defined in (3–5), Fig. 1. The learning algorithm is shown in (6–8),
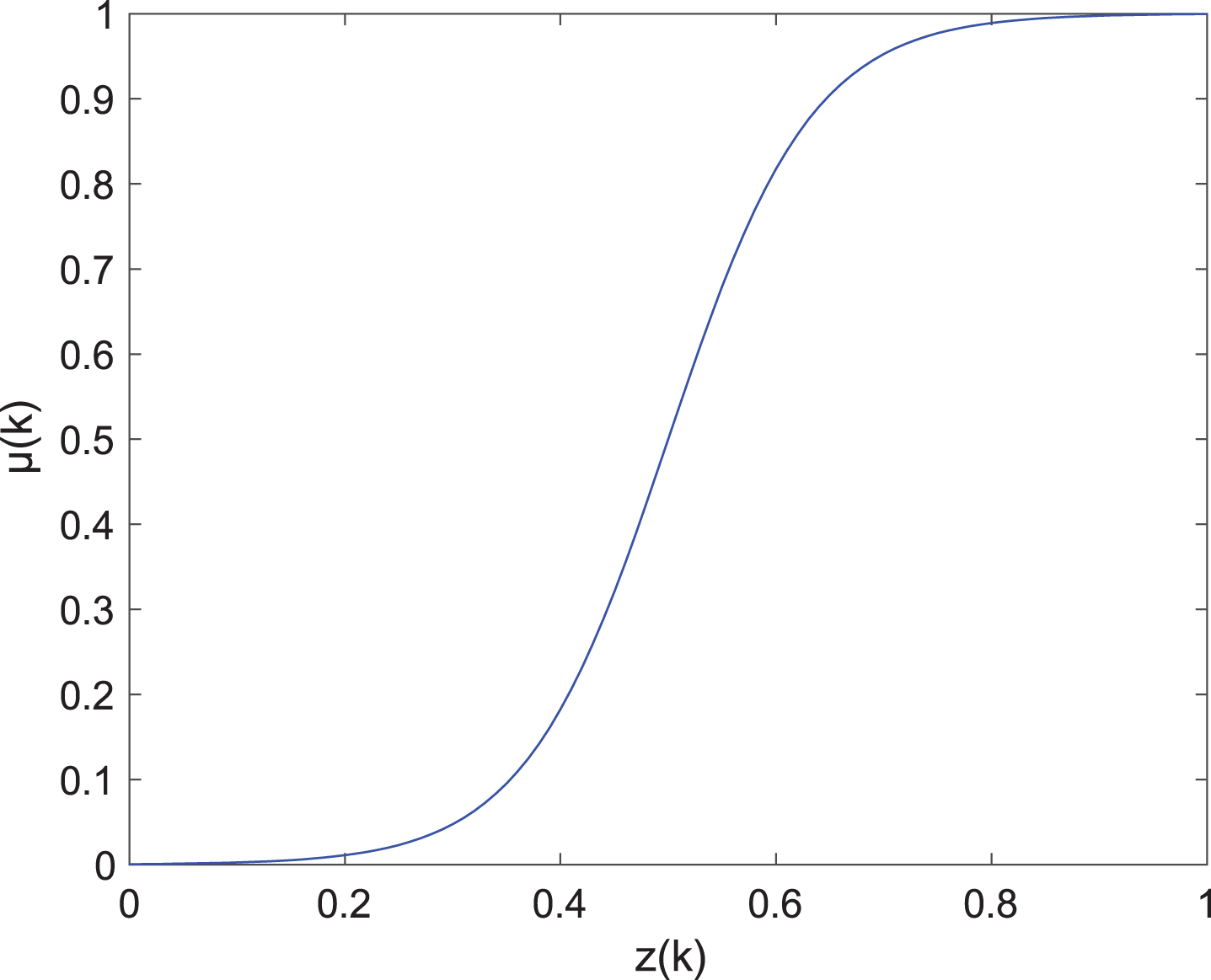
Sigmoid Activation Function or membership function for unipolar systems.
Where:
k time variable.
a 0 < a
b 0 < b
e (k) error.
γ (k) learning factor, 0 < γ ⩽ 1.
V threshold (k) threshold.
z inj (k) dendrite inputs.
w inj (k) synaptic weights.
Fuzzy bipolar systems are within the interval [–1,1]. Nonlinear operation with threshold is defined in (9), Fig. 2 and the learning algorithm in (10–12),
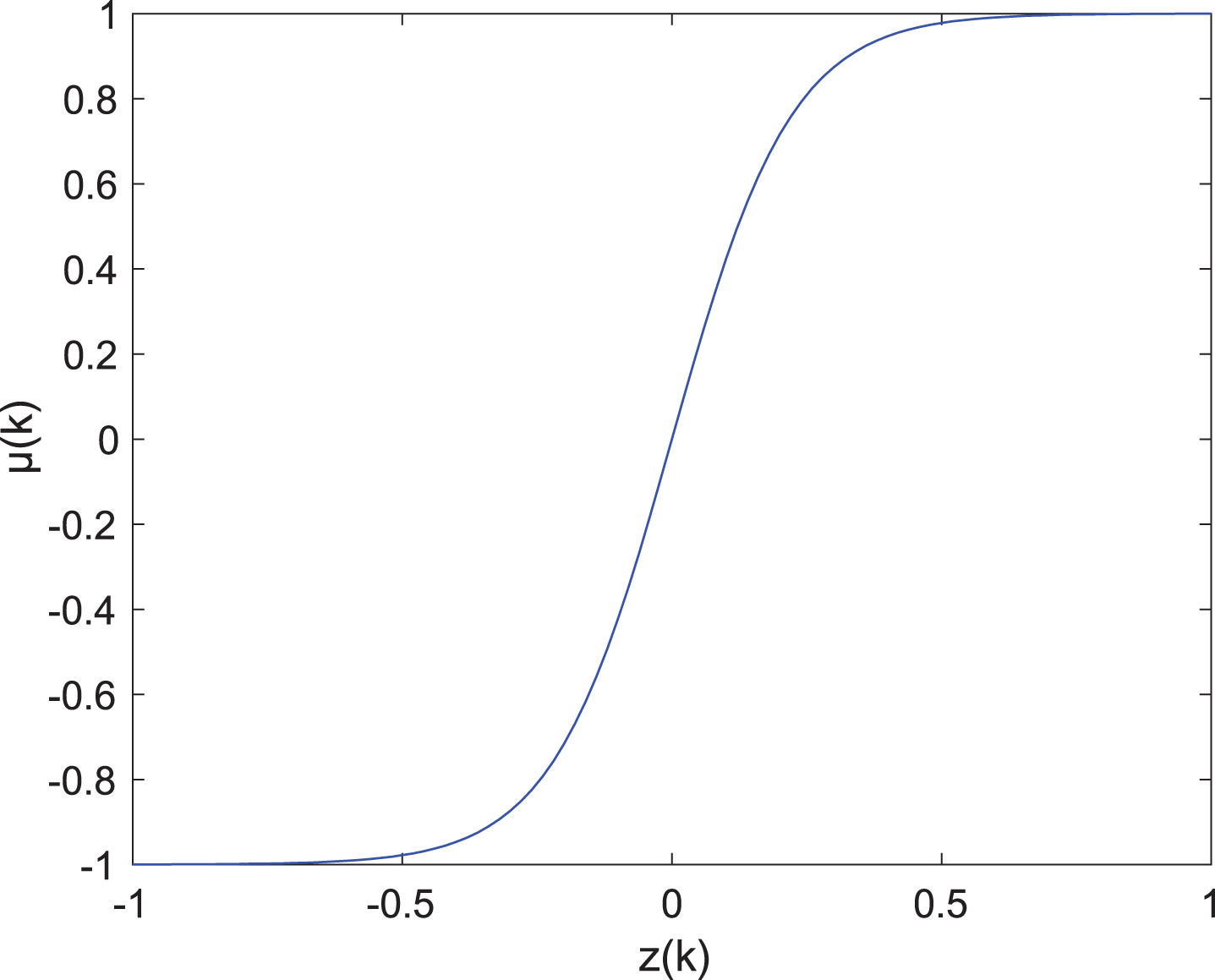
Sigmoid Activation Function or membership function for bipolar systems.
k time variable.
c 0 < c
e (k) error.
γ (k) learning factor, -1 < γ ⩽ 1.
V threshold (k) threshold.
z inj (k) dendrite inputs.
w inj (k) synaptic weights.
If
α ∈[0, 1] for unipolar systems
α ∈[-1, 1] for bipolar systems
Then, an ordinary multimapping
However, for FANs is possible to stablish a height with a second threshold α+, (16) based on (3), therefore threshold in (3) can be expressed as α-, (15),
Where, α- ⩽ α+.
A system with fuzzy inference rules, membership functions, and adaptive neural networks define ANFIS, based on Mamdani and Takagi-Sugeno-Kang (TSK) fuzzy models [10].
Based on Mamdani fuzzy model and expressing by inference product and a fuzzifier, the p output of the fuzzy logic system,
Where i = 1, 2, …, l,
Where μ
A
ji
is the membership functions of the fuzzy sets A
ji
. In [10] we defined,
Where parameters
Where 0 < η ⩽ 1.
A Takagi-Sugeno-Kang fuzzy model,
Where j = 1, 2, …, m.
Where φ
i
is defined in (19). Expressing (23) in the form of Mamdani-type,
Where
A TSK-type fuzzy neural model with Gaussian membership functions, the q output of the fuzzy logic system is,
A learning algorithm is,
Where 0 < η ⩽ 1.
Based on inputs-outputs information of the identified plant/function, we develop a model with FANs, for system identification and obtain a model with fixed weights, models 1-2.
Neuronal fuzzy modeling allows us to approximate
Where Φ [·] is a function. For model 1 H (k) = X (k). For model 2, the NARMA (nonlinear autoregressive movement average) model [10], the multivariable NARMA form, where H (k) = [Y (k - d t ) , …, U (k - d t ) , …] T . Where d t is a time delay.
A model
Where v1 is a constant.
In [10] we used the fuzzy neural network (18), here we propose,
Where
Nonlinear system identification is based on four methods to compare, we define the approximation with the proposed model (34) for the SAF-FANs method (4–7), RBF-NN method, ANFIS method and the learning algorithm for fuzzy systems. For FANs method, the models (35–38) is proposed,
Where v2 · sv9 are a constant.
In [10] we used the fuzzy neural network (25), here we propose,
Where
Comparison between the learning algorithm of the ANFIS and the FAN
A model
The learning algorithms of the ANFIS and FANs are similar because they are both use the error correction method.
The comparison analysis is based on the equations to update the weights and their operating intervals of the parameters [19, 28–31], for example, the learning factor.
Equation (21) defines weight training for ANFIS, and (38) developed, defined and presented in [19, 23] for FANs.
For both algorithms, the learning factors 0 < η ⩽ 1 and 0 < γ ⩽ 1 are bounded. However, ANFIS (21) applies to both unipolar [0, 1] and bipolar [–1, 1] intervals. FAN (41) is limited for unipolar an bipolar intervals.
ANFIS learning algorithm for unipolar input-output can also take bipolar values. FANs are bounded for unipolar and bipolar values. Therefore, the error is more bounded in the FAN learning algorithm,
For bipolar input-output, from (21),
If w ANFIS (k) = -1, η · e (k) · Φ T [X (k)] = 1 then w ANFIS (k + 1) = -2.
From (38), If w FAN (k) = -1, γ · e (k) · Φ T [X (k)] = -1.
Then w FAN (k + 1) = -2. Due to bounded conditions,
-1 ⩽ w FAN (k + 1) ⩽ 1, ∴ w FAN (k + 1) = -1. Therefore,
w FAN (k + 1) ⩽ w ANFIS (k + 1), the FAN learning algorithm for fuzzy systems has more bounded parameters than that of the ANFIS.
Nonlinear systems in discrete time can be expressed as (32) for model 1 and (38) for model 2, in matrix form. Then,
Model 1
Where W* are the unknown weights to minimize the unmodeled dynamic
Identification error of FAN training method in matrix form, is defined as,
Where,
From (41) and (42),
For open-loop systems identification, it is assumed model 1 and model 2 are bounded-input-bounded-output (BIBO) stable, i.e. y (k) and x (k) at model 1, are bounded. Membership function μ SAF [·] is bounded. The stability analysis for nonlinear system modeling based on the novel FAN method is given by the following theorem.
Theorem: If unknown nonlinear systems model 1 and model 2, (30), are modeled by the fuzzy systems (32) and (38), the weights are updated by (48) and (49), then the modeling error e (k) is uniformly ultimately bounded (UUB). The normalized identification error is,
Satisfies the following average performance,
For bipolar systems with values at interval [–1,1],
-1 ⩽ W (k + 1) ⩽ 1
-1 < Γ (k + 1) ⩽ 1
A positive defined scalar L
k
is selected,
By the updating law (48), we have,
Using the inequalities,
For any “q’’ and “r’’. By using (46) and (53), with -1 < Γ
N
(k) ⩽ Γ (k) ⩽1, we have,
Where ζ (k) and δ (k) are defined as,
Where
From (43) and (52) we know L
k
is the function of E (k) and
Because the “INPUT” is bounded and the dynamic is ISS, therefore the “STATE” E (k) is bounded.
Applying the bounded conditions for W
N
(k + 1) and Γ
N
(k + 1), Equation (54), from 1 up to T and using 0 < L
T
and L1 is a constant, we obtain,
Remark 1. To obtain high modeling accuracy for classical fuzzy neural networks, the main difficulty is deciding the parameters. However the novel fuzzy system with adaptive neurons has less parameters to be chosen. And the modeling error converges to the zone
Remark 2. If the fuzzy system (30) could match the nonlinear plant (29) exactly (if η
d
(k) =0), i.e., it could find the best W* such that the nonlinear system could be expressed as F (k) = W* (v1 + ∑X (k) + Φ [X (k)]), the same learning law makes the identified error E (k) asymptotically stable
Remark 3. The normalization of the learning rates in (43) and (47), are time-varying in order to insure the stability of identification error. The learning rates are easier to be reached than [10]. Because the initial condition does not need any previous information, the time-varying learning rates are usually robust.
This section presents the proposed stable and optimal learning algorithms with ANFIS and SAF-FAN for model 1 and SAF-FAN, RBF-NN, ANFIS and the FAN learning algorithm, applied to the approximation of functions and identification of nonlinear systems [10]. For model 2 the weights w i are obtained with the error correction learning algorithm for fuzzy systems [19, 21].
Model 1. Two-dimensional function approximation
The proposed model in (32), approximates the following nonlinear function:
We use SAF-FANs (9), for function approximation. The number of input variables is 2. To train the model, 300 data were used, T = 300, the training data selected were, x1 (k) = -1 + 2k/T, x2 (k) =1 - 2k/T, k = 1, 2, ·⋯, T. After training and leaving the weights fixed, the simulation results of the function identification are shown in Fig. 3. The error for weight training online, for finite time is defined as,
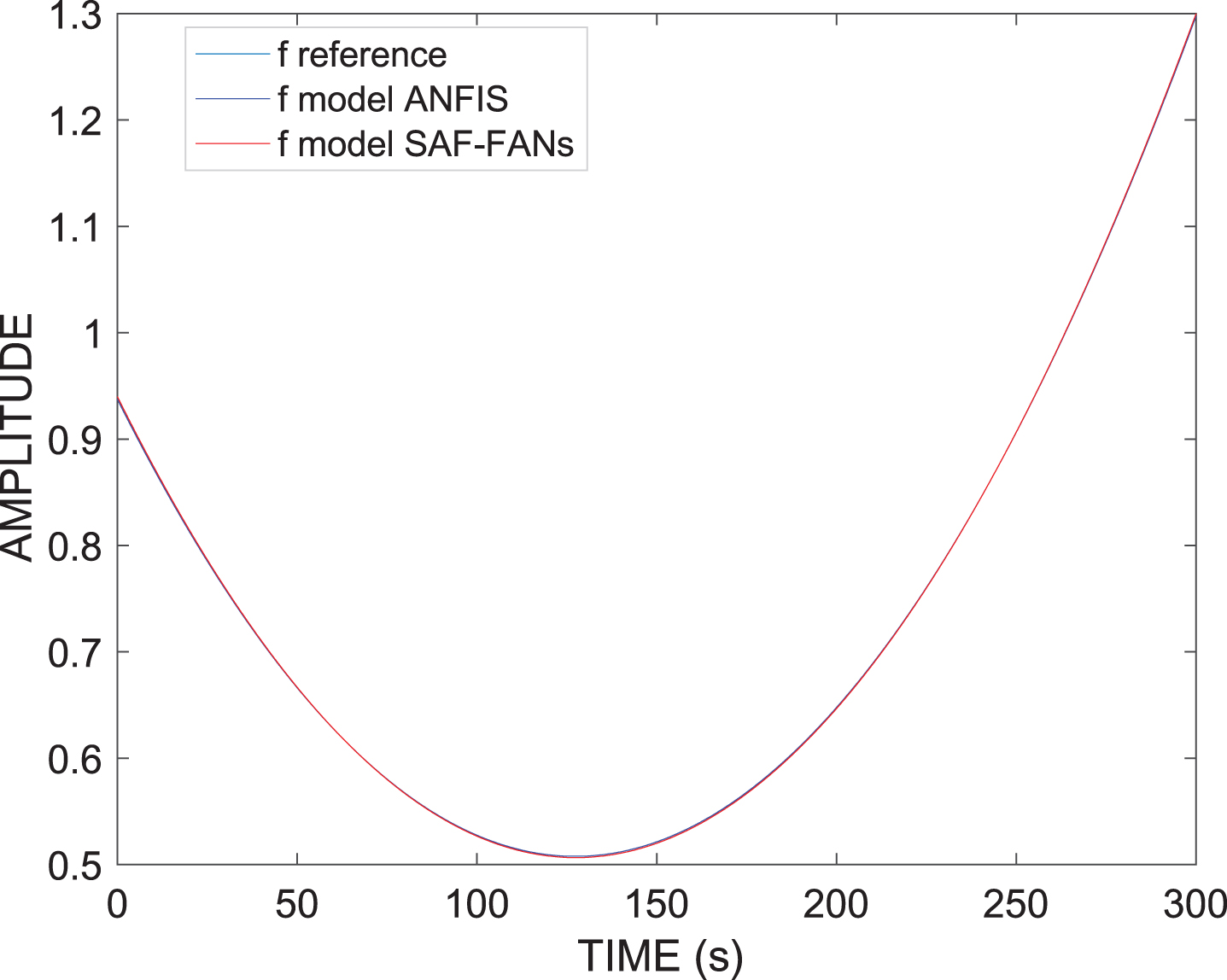
Model 1, Two-Dimensional Function Approximation with ANFIS and SAF-FANs.
From (32), for this two-dimensional system we propose the following standard form,
We use the ANFIS and SAF-FANs for modeling the nonlinear plant, Fig. 3. The error after training is defined for finite time as,
Defining the mean squared error for finite time is,
For ANFIS the fixed weights were obtained after 200 periods of training. Two triangular membership functions were used. The initial conditions were, Weights, win ANFIS
ij
(k) =1; i = 1, ⋯ , 4; j = 1. Learning factors, fixed values, η
AFISi
(k) =1. ANFIs inputs, zin ANFIS11 (k) =1, zin ANFIS21 (k) = x1 (k) , zin ANFIS31 (k) = x2 (k) , zin ANFIS41 (k) = x1 (k) x2 (k). Reference outputs Ideal values of the weights are unknown. Sampling period is K
sample
= 0.01 second.
For SAF-FANs the fixed weights were obtained after 100 periods of training. The initial conditions were, Weights, win FAN
ij
(k) =1; i = 1, ⋯ , 4; j = 1. Learning factors, fixed values, γ
AFNi
(k) =1. The threshold values for all the FANs are, c = 9. FANs inputs, z
inAFN
11
(k) =1, z
inAFN
21
(k) = x1 (k) , z
inAFN
31
(k) = x2 (k) , z
inAFN
41
(k) = x1 (k) x2 (k). Reference outputs Ideal values of the weights are unknown. Sampling period is K
sample
= 0.01 second.
The mean squared error for ANFIS is J (300) = 6.3584e - 7 and for SAF-FAN is J (300) = 1.0313e - 25, Fig. 2.
Applying the fuzzy ANFIS and SAF-FAN methods, with error correction learning algorithms, very good results were obtained Figs. 3, 4, in addition to stable modeling, optimization of the system identification was achieved.
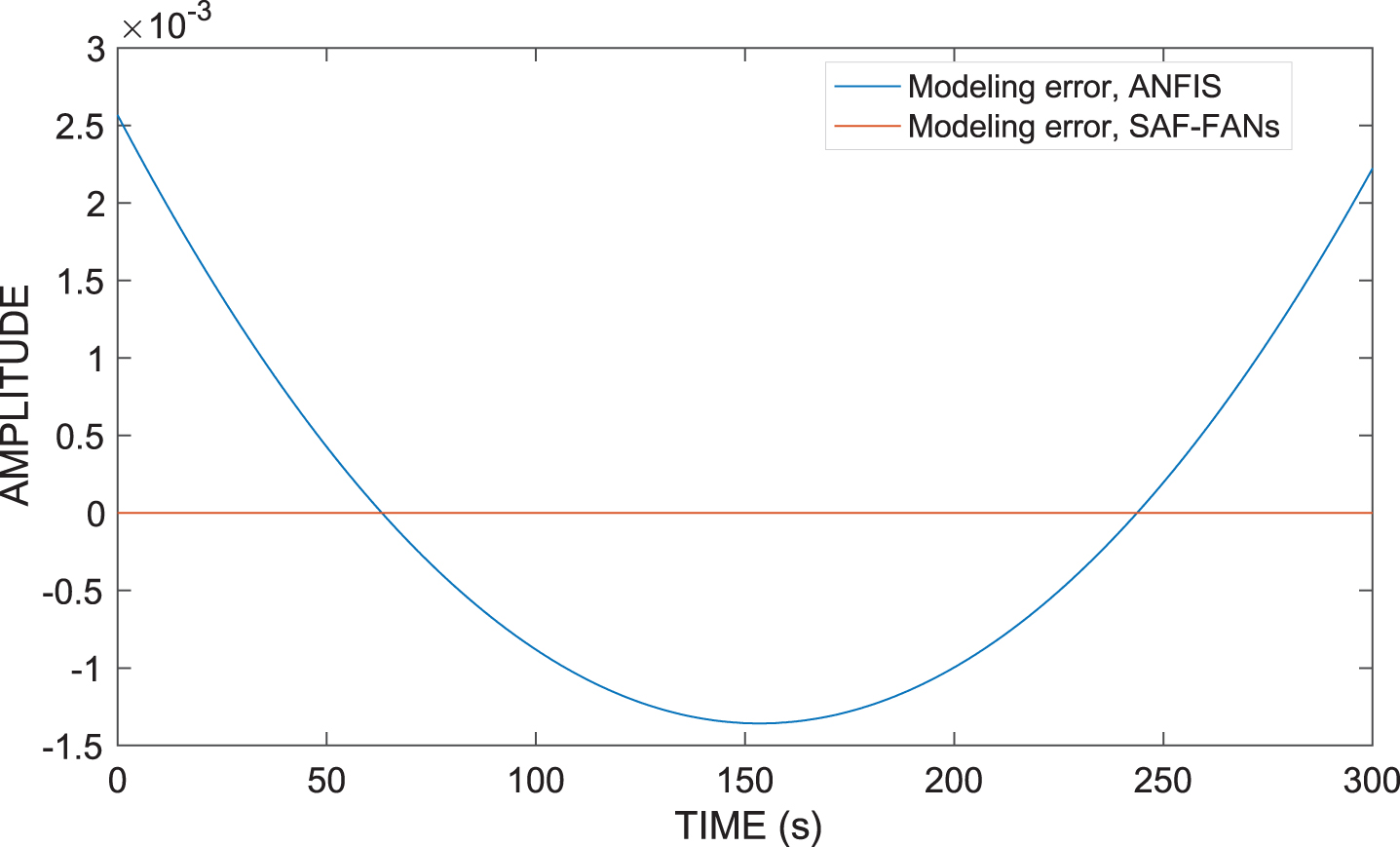
Model 1, mean squared error of ANFIS and SAF-FANs.
A nonlinear system is used to illustrate the performance of RBF-NN, SAF-FAN, ANFIS and learning algorithm FANs (5-7, 12-14). A comparison is made between these methods. Equation (34), describes the identified plant [10],
For this unknown nonlinear system (35), we propose the following standard form,
Where g1 = 3, u (k) are random numbers in [0,1]; we use the SAF-FANs for modeling the nonlinear plant, Figs. 5, 7.
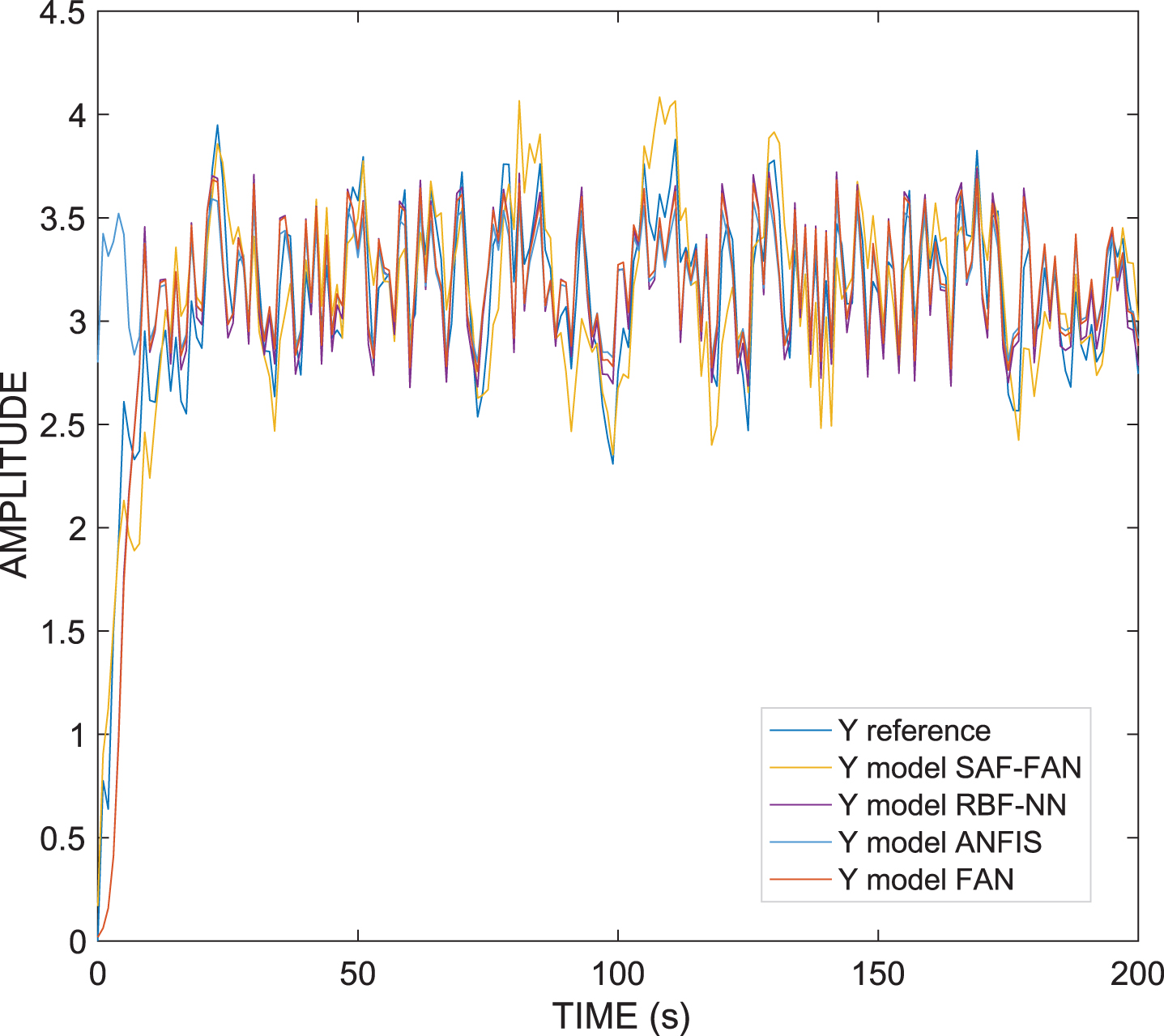
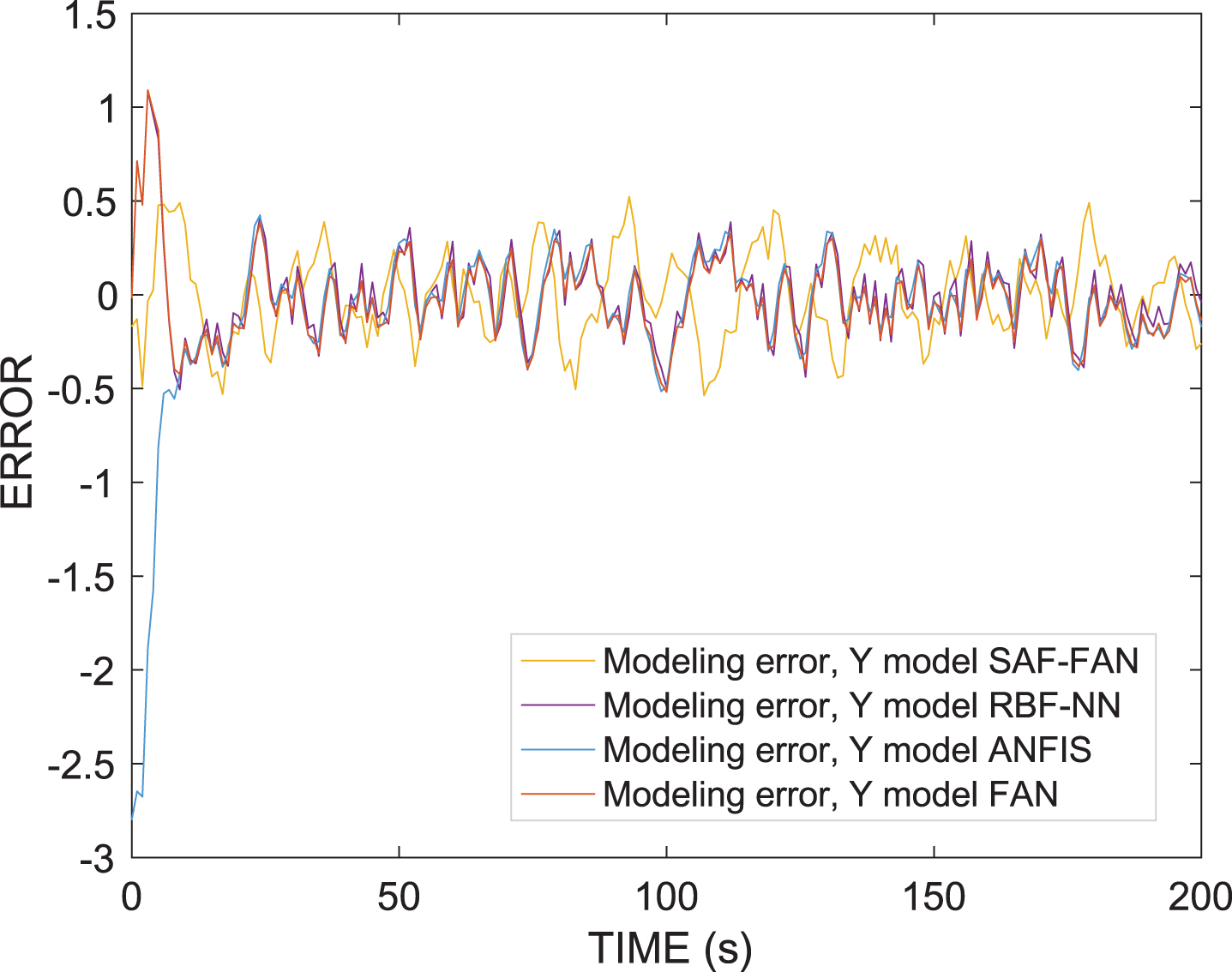
Model 2, Nonlinear System Identification in training based on SAF-FANs, RBF-NNs, ANFIS and Learning Algorithm FANs.
Model 2, mean squared error in training of SAF-FANs, RBF-NNs, ANFIS and Learning Algorithm FANs.
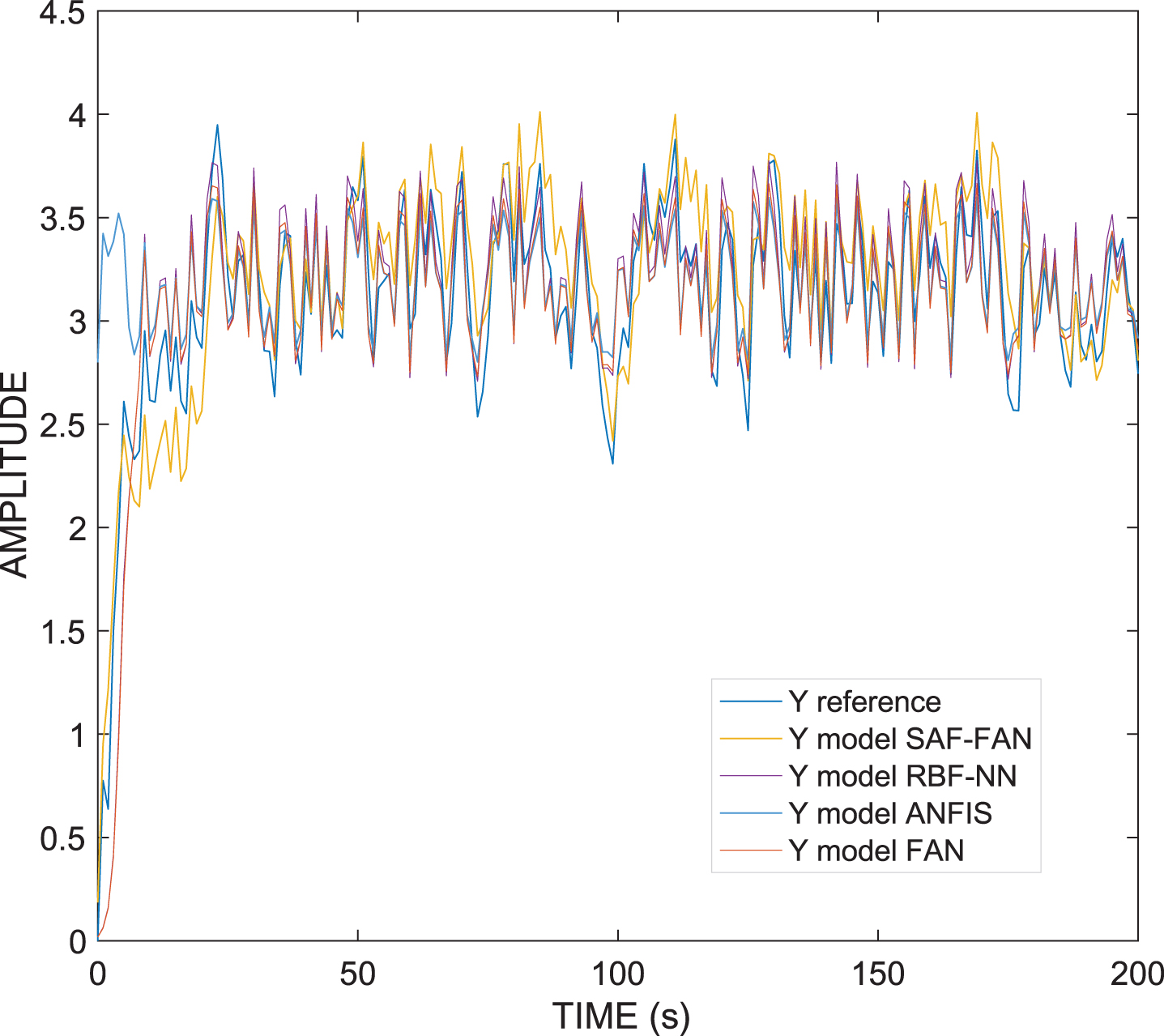
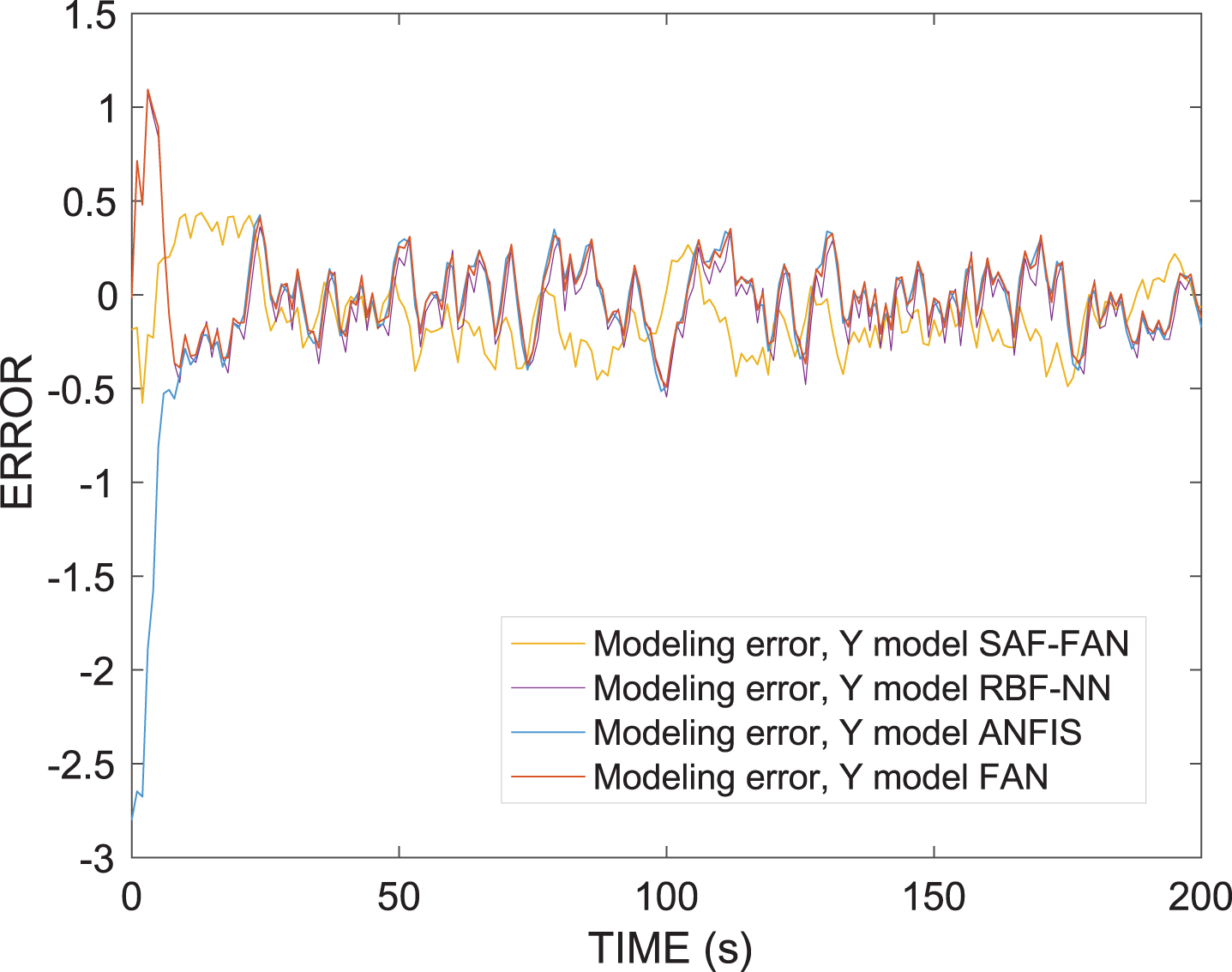
Model 2, Nonlinear System Identification with fixed parameters based on SAF-FANs, RBF-NNs, ANFIS and Learning Algorithm FANs.
For weight training, the error was normalized with a factor g4
The error after training is defined for finite time as,
Fixed weights were obtained after ten periods of training. J1 (200) = 0.0276, Figs. 6, 8. The initial conditions, Weights, win FAN
ij
(k) =1; i = 1, ⋯ , 5; j = 1. Learning factors, fixed values, γFAN i (k) =1. The threshold values for all the FANs are,
The values for the parameters a, b are, a = 11, b = 2. FANs inputs, zin FANi1 (k) =1. Reference outputs Ideal values of the weights are unknown. Sampling period is K
sample
= 1 second.
For this unknown nonlinear system (36), we propose the following standard form,
Where u (k) are random numbers in [0,1], c1 = 5; we use the RBF-NNs with error correction algorithm for modeling the nonlinear plant, Figs. 5, 7.
Fixed weights were obtained after ten periods of training. J2 (200) = 0.0277, Figs. 6, 8. The initial conditions, Weights, win RBF
ij
(k) =0; i = 1, ⋯ , 2; j = 1. Learning factors, fixed values, γ
FANi
(k) =1. δ
RBF
i
(k) =0, σ
RBF
i
(k) =0.0001. RBFs inputs, zin RBF11 (k) = u (k - 1) , Reference outputs Ideal values of the weights are unknown. Sampling period is K
sample
= 1 second.
For this unknown nonlinear system, from (19), (37), we propose the following standard form,
Where u (k) are random numbers in [0,1], g3 = 0.035, g4 = 4, we use ANFIS with error correction algorithm for fuzzy systems [10], for modeling the nonlinear plant, Figs. 5, 7.
Fixed weights were obtained after 20 periods of training. J3 (200) =9.1525e - 4, Figs. 6, 8. The initial conditions, Weights, win ANFIS
ij
(k) =1; i = 1, ⋯ , 5; j = 1. Learning factors, fixed values, η
ANFISi
(k) =1. Gaussian membership functions c
ANFIS
i
(k) =0.00001, σ
ANFIS
i
(k) =37e3. ANFIS inputs, Reference outputs Ideal values of the weights are unknown. Sampling period is K
sample
= 1 second.
Model 2, mean squared error with fixed parameters of SAF-FANs, RBF-NNs, ANFIS and Learning Algorithm FANs.
For this unknown nonlinear system (38), we propose the following standard form,
Where g5 = 0.5, g6 = 0.145, g7 = 0.004, g8 = 0.145, g9 = 0.980075, c1 = 5, u (k) are random numbers in [0,1]; we use the learning algorithm FANs for modeling the nonlinear plant, Figs. 5, 7.
The error after training is defined for finite time,
Fixed weights were obtained after 20 periods of training. J4 (200) = 2.6010e - 4, Figs. 6, 8. The initial conditions, Weights, win FAN
ij
(k) =1; i = 1, ⋯ , 18; j = 1. Learning factors, fixed values, γ
FANi
(k) =1. Learning algorithm FANs inputs, zin FAN11 (k) = zin FAN21 (k) = zin FAN71 (k) = zin FAN81 (k) = zin FAN131 (k) = zin FAN141 Reference outputs Ideal values of the weights are unknown. Sampling period is K
sample
= 1 second.
The results obtained from the simulation of model 1 of the two-dimensional function approximation Fig. 3, based on FAN, were considerably better compared to ANFIS.
The mean squared errors for models 1 and 2 are shown in Tables 1 and 2.
For model 2, the identification of the nonlinear system was carried out by four methods, SAF-FANs, RBF-NN, ANFIS and learning algorithm FAN. Comparing the results obtained from the simulations, Figs. 5-8, the mean squared errors of the FANs method in training and testing are much lower than those obtained with the RBF-NN and ANFIS methods, Fig. 8.
FANs, based on the results of simulations of models 1-2, have identified the proposed nonlinear systems with great precision, showing their potential for systems modeling.
For the identification of nonlinear systems, in this article, we solve the problem with the FANs learning algorithm and SAF. Stability analysis was performed successfully in Section 4.
The results obtained from the modeling simulation of the nonlinear systems in Section 5 show that the identification of systems with FAN is performed more efficiently than other methods such as RBF-NN and ANFIS. Reducing the error considerably, through configurations of FANs and SAF.
Multiple applications can be carried out applying the FANs method, with their learning algorithm for fuzzy systems, and activation functions SAF, for systems identification, control and automation of systems, low-scale unmanned aerial vehicles (UAVs), optimization of manufacturing processes by laser beam, seismic systems to model their behavior by processing seismic accelerograms, image processing among others [23, 32–34].
Footnotes
Acknowledgment
We would like to thank the support of the CONACYT Postdoctoral Scholarship Program, together with the Department of Automatic Control and Computer Department of CINVESTAV-IPN, CONACYT Research Fellows -CIIIA, FIME, UANL Program and Electromechanical Engineering Division, ITSOEH.