
Abstract
Path planning for robots plays a vital role to seek the most feasible path due to power requirement, environmental factors and other limitations. The path planning for the autonomous robots is tedious task as the robot needs to locate a suitable path to move between the source and destination points with multifaceted nature. In this paper, we introduced a new technique named modified grey wolf optimization (MGWO) algorithm to solve the path planning problem for multi-robots. MGWO is modified version of conventional grey wolf optimization (GWO) that belongs to the category of metaheuristic algorithms. This has gained wide popularity for an optimization of different parameters in the discrete search space to solve various problems. The prime goal of the proposed methodology is to determine the optimal path while maintaining a sufficient distance from other objects and moving robots. In MGWO method, omega wolves are treated equally as those of delta wolves in exploration process that helps in escalating the convergence speed and minimizing the execution time. The simulation results show that MGWO gives satisfactory performance than other state of art methods for path planning of multiple mobile robots. The performance of the proposed method is compared with the standard evolutionary algorithms viz., Particle Swarm Optimization (PSO), Intelligent BAT Algorithm (IBA), Grey Wolf Optimization (GWO), and Variable Weight Grey Wolf Optimization (VW-GWO) and yielded better results than all of these.
Keywords
Introduction
In modern era, an intelligent machine plays a pivotal role in human life to perform various activities in dynamic environments. Among them, usages of autonomous mobile robots have been considered critical. These robots are used in various applications and thereby assist human life for accomplishing various tasks such as automated transportation, computer aided diagnosis, home maintenance, and surveillance in defense etc. [1, 2]. The initial job of mobile robots is to directly fetch information from their surroundings without any human involvement.
Path planning for autonomous mobile robots deals with construction of a feasible trajectory in such a way that all the robots can have the collision free path to reach the destination point. There are two categories of path planning algorithms; one is known as centralized and other as decentralized. In centralized planning techniques, all the individual robots construct the complex environment to find the optimal path [3]. In this, path planning algorithm is used to compute robot’s constraints and their objective functions while in case of decentralized approach, personal configuration space is assigned to each and every robot for path planning [4–6].
Robots have the potential to deal with the complex situations and harsh environment, where it’s hard for humans to work. To move on to the path from starting point to target point, it needs either 2D or 3D workspace [3]. In general, path is defined as a collection of organized points located in contiguous framework [5]. The essential steps which are required for the proper path or route planning are given as follows [7]:
Over the past twenty years, numbers of conventional and evolutionary methods have been introduced by different eminent researchers for developing path planning models for autonomous mobile robots. In this context, several deterministic, heuristic, and meta-heuristic algorithms have been developed by researchers over the years [8]. For instance, Gigras et al. [9] proposed the artificial bee colony (ABC) optimization technique for the route planning problem and compared their results against PSO algorithm in terms of convergence rate, demonstrating the superiority of ABC algorithm over PSO. On applying the ABC optimization technique, the significant improvement was observed in convergence rate with increase in population size. Another advantage of ABC algorithm is that it uses the less number of control parameters as compared to PSO. However, the developed method has poor accuracy and convergence speed, while applying for high dimensional and complex problems such as clustering, job scheduling, mining etc., which requires highly, optimized solutions.
Dewangan et al. [10] utilized GWO algorithm to solve the three dimensional path planning problem of unmanned aerial vehicles (UAVs) and obtained the feasible trajectory between source and target points. The GWO algorithm outperformed over the other deterministic algorithms such as Dijkstra, A*, D*, and metaheuristic algorithms such as biogeography based optimization (BBO), particle swarm optimization (PSO), glowworm swarm optimization (GSO), and sine cosine algorithm (SCA) in terms of path calculation and convergence rate. However, the major limitation of GWO algorithm for three dimensional path planning problem is that it can have the sharp turn in the retrieved path that might create a problem for UAV’s during navigation.
Khandelwal et al. [11] proposed modified grey wolf optimization (MGWO) technique to solve the transmission network expansion planning (TNEP) problem for six bus Graver’s system as well as for Brazilian 46-bus system. The TNEP problem is considered complex, large scale, and non-linear mixed integer problem. The performance of the proposed algorithms was evaluated using twenty standard benchmark functions and achieved excellent results in terms of success rate (SR), average number of function evaluations (AFE), mean error (ME), and standard deviation (SD) over other meta-heuristic algorithms. The authors also illustrated the utilization of MGWO to solve the multimodal and non separable complex optimization problems. The developed algorithm achieved the satisfactory results in comparison to the other nature inspired algorithms such as GWO, PSO, ABC, and differential evolution (DE).
Similarly, Gupta et al. [12] presented an improved version of GWO algorithm (I-GWO) with opposition based learning and chaotic local search for integer and mixed integer optimization problems. They adopted opposition based learning to accelerate the convergence rate, while maintaining the balance between exploration and exploitation using the chaotic local search. They achieved satisfactory results for optimization problems for mixed integers with the proposed algorithm.
One more powerful algorithm named variable weight grey wolf optimization (VW-GWO) was recently proposed by Kumar et al. [13] in order to obtain an optimal solution for path planning problem of mobile robots. In this study, variable weights were assigned to α, β, and δ wolves according to their respective positions from the prey. The authors argue that α wolves being nearest to the prey should be given higher weights compared to β, and δ wolves initially. This method was initially proposed by Gao et al. [14] in year 2019 claiming its superiority over original GWO method based on twenty standard benchmark functions.
Another improved variant of GWO was suggested by Ge et al. [15] that dealt with the unmanned aerial vehicles (UAV) path planning issues for oilfield inspection. In this paper, authors developed grey wolf fruit fly optimization (GWFOA) algorithm by integrating fruitfly optimization (FOA) and GWO. Basic GWO algorithm provides weak optimal solutions for oilfield path planning problems due to random generations of new solutions. To resolve this problem, authors integrated fruit fly optimization algorithm with GWO that enhanced the capability of GWO algorithm and enabled it to get the satisfactory solutions in the complex environment [15].
Apart from GWO based algorithms [16–25], the researchers have also used other nature inspired algorithms such as particle swarm optimization (PSO) [26–30], and Intelligent BAT algorithm (IBA) [31–33] for yielding an effective optimized solution for path planning, unit commitment, and optimal reactive power dispatch problems. However, GWO and its variants [34–43] have been proven more useful for solving such problems.
Patle et al. [44] presented the exhaustive study of large number of mobile robots navigation methods used so far. They reviewed traditional and reactive approaches in their paper to present the development of route planning techniques and identified various research gaps therein. In their study, they found reactive approaches more promising than traditional methods for topographical surfaces. According to their study, the reactive approaches can also be used to improve the performance of the conventional algorithms while used as hybrid algorithms.
Some traditional methods such as Grid method [45], neural network [46], fuzzy method [7, 47], evolutionary algorithms [48], probabilistic road maps [16], randomly exploring algorithms [6], visibility graphs, and Dijkstra deterministic search [8] have also been successfully applied for solving real world optimization problems. However, these conventional approaches offer some limitations in terms of slow convergence speed and low accuracy [18]. Traditional approaches based system need more computational time to obtain optimal solutions due to incomplete information about the environment [39]. To address this issue, classical approaches can be combined with the evolutionary algorithms such as PSO, IBA, and GWO. Most of the evolutionary algorithms have the capability not to trap into local optima, and also enlarge the range of random search. Though, this additional feature of evolutionary algorithms is obtained at an extra computational cost, especially when the search space is very irregular. As we know that the search space for robot path planning problem is very irregular. Hence, it is difficult to get global optimal solution for path planning task. In this study, we adopted a new method known as MGWO to address the aforementioned problem. The adopted MGWO algorithm is based on Grey wolf optimizer and includes omega wolves in searching and hunting process along with the alpha, beta and delta wolves. Due to the involvement of omega wolves along with alpha, beta and delta wolves, the MGWO algorithm converge much faster and take less processing time to find the suitable path trajectory for mobile robots. Sometimes the non-involvement of omega wolves in GWO algorithm poses a limitation on the exploration phase and puts a constraint on convergence speed resulting into stagnation of initial population into local minima during search process while MGWO has minimal chances of getting stuck into local optima.
The key points of swarm based algorithms are to generate most favorable paths in a typical workspace in comparison to that of conventional deterministic methods [18]. These techniques are robust as well as efficient and also offer good solutions for different applications [19]. High computational cost is still of prime concern that could be reduced further using either hybrid meta-heuristic algorithms or their modified versions [20]. Therefore, in this study, the enhanced version of GWO called MGWO is introduced to make a 2D path planning strategy for multiple robots that tend to give more satisfactory performance in comparison to other recent studies based on meta-heuristic algorithms for this specific application. The proposed algorithm shows the faster convergence towards the global solution while avoiding the problem of local optima.
Table 1 presents scope, advantages and limitations of various current states of art methods available in the literature. This also presents the key points of the algorithms, depicting the similarities and differences among GWO variants and other considered algorithms.
Summary of scope, advantages and limitations of current state of art methods including GWO and its variants over last three years
Summary of scope, advantages and limitations of current state of art methods including GWO and its variants over last three years
**The last column summarizes the key points of various algorithms depicting the similarities and differences among them.
The limitations of the above studies [10–15, 51] and successful attempt of MGWO algorithm for transmission network expansion planning (TNEP) problem motivated authors to explore its use for developing path planning model for autonomous mobile robots. Therefore, in this study, we made an attempt to implement MGWO algorithm for mobile robot path planning problem and analyzed its performance with respect to extremely prevalent nature inspired algorithms. This approach was first introduced by Khandelwal et al. [11] for solving TNEP problem and is a recent contribution to the field of swarm intelligence. In author’s viewpoint, the modified variants of GWO could yield competent results due to having high resemblance between TNEP and robot path planning problems, both being complex, large scale and non-linear.
The contributions of the present study are: To introduce a modified version of GWO known as MGWO for route planning of autonomous robots that is comparatively faster than those of original GWO and traditional algorithms in terms of speed. To analyze the performance of the proposed method using different maps and is compared with other state of art methods such as PSO, GWO, VW-GWO, and IBA in terms of speed and convergence. To analyze the performance of proposed method in terms of distance covered and execution time and the results are compared with other state of art methods (non-deterministic algorithms) for different number of iterations and population size.
This paper is organized as follows: section 2 describes problem formulation for multiple robots route planning and formation of surrounding. Section 3 explains GWO, MGWO, and VW-GWO path planning algorithms and aligning of MGWO technique to the multiple robot route planning problem. Implementation procedure and performance comparison of various algorithms are discussed in section 4. Section 5 presents results and discussion including convergence analysis of MGWO algorithm and its performance evaluation. Section 6 includes the conclusion.
Problem statement
The multiple robot 2D route planning can be represented as a function of initial and final points that would follow up the desired trajectories as:
Where inputi represents the origin indicated by (x a , y a ) for ith robot which is indicated as roboti, outputi represents the destination point (xd, y d ) for roboti while trajectoryi points out the appropriate track for roboti.
The primary aim of route planning is to determine a non-interacting optimal path with minimal path length cost ($i). The initial position matrix for n robot is expressed as:
Where pos
i
provides the information about the situation of i
th
robot in a space of m dimension. As we are considering 2D space, therefore, the value of m is set as 2. The path length (Lp
i
) of each given robot is shortened by using objective function as follows:
The objective function is subject to constraint
Where i and j express distinct robots.
$i represent route of ith robot and is expressed as:
Where c j express the route cost related with the route $ j , whereas, the non-interacting track of robot i and j is denoted by pij. Therefore i and j have been considered from non-crossing routes lying between initial and final points.
We have generated 3D-model graphs to present the multiple paths planning for the robots. The map permits the robots to move towards the goal point without having impact with static objects as well as other moving robots. In this research experiment, we have used four maps for the simulation process, which, along with their map boundaries, are presented in Table 3. There are initial boundary position and end boundary position for all the robots including obstacles. The initial and final positions of the robots are listed in Table 2. Table 3 presents the 3D coordinates of the obstacles, assuming the third dimension to be almost negligible. Here, the obstacle height (z-coordinate) is set to 0.25. In this experiment, we have considered 3D maps for the clear representation of 3D objects. However, the experiments were conducted for robots moving along the two axes x, y in the 3D map. Owning to this, we assumed the movement of robot in Z direction negligible (i.e. zero) for all the simulations carried out in this work. Obstacle representations for different maps are given in Table 3, where, absence of obstacles is indicated by dashes.
3D map source and destination representation of six robots
3D map source and destination representation of six robots
Obstacle dimensions for 3D maps
In this section, firstly, we discuss the theoretical background of GWO and MGWO algorithms along with building the robot routes for grey wolves. Thereafter, the competency of implemented technique is compared with most recent state of art methods given in the literature.
Building the robot routes for grey wolves
In this algorithm, firstly the path with matrix ‘Pm’ is initialized, and then the source point ‘Sp’ is chosen, considering the later as current point. Here, N represents the highest counts in the matrix. If the route matrix contains the points greater than ‘N’, then the new developed route is assumed as a current solution. The modified GWO algorithm yields grey wolf as a connecting route between two points within the workspace [38]. Acquired outcomes include a price feature as discussed in the previous section. This value determines the work functionality. Better results are expected to achieve in terms of speed due to the involvement of omega wolves in exploration and exploitation process. To avoid the likelihood of robot entering into a countless loop or resettling again to the initial position, neighbor randomness was taken into consideration during its development phase to achieve the desired solution.
Pseudo code for the random neighbor selection algorithm [39].
In this experiment, the workspace was symbolized as a discrete map. The discrete map was divided into identical sized cells referred to as grid. The main reason behind choosing the discrete map is that it seems to be more suitable than continuous map for graph representation. Robot path can be regarded as set of continuous points that initially begins from source point ultimately reaching to the target point. However, setting up the route from a specific point in the given maps generates eight possibilities for a robot to move in different directions on the surface. For example for an object O (x, y), the eight adjacent cells in the grid are denoted by:
1 can be added or subtracted for reaching the next point in the two dimensional workspace.
Mirjalili et al. [20] developed an algorithm based on the social conduct, social hierarchy and trapping process of grey wolves. The developed algorithm is popularly known as GWO. The main steps associated with this algorithm are: (i) search for the prey, (ii) enclose the prey followed by hunting and pouncing.
In general, a metaheuristic algorithm includes two phases: an exploration followed by exploitation. Initially, in the first phase, the search points are decided by the grey wolves for different target nodes in the workspace. Thereafter, adjacent points join together to acquire optimized path length [39].
Social hierarchy
Alpha (α), beta (β), delta (δ) and omega (ω) wolves constitute the social hierarchy of grey wolves. We get the first best solution by α, followed by second and third best solution by β and δ, respectively. Whereas, response time of ω is slow. Alpha is usually considered as leader, who is responsible to frame rules and regulations for other wolves, while, the β wolves implements the instructions received from α., and δ wolves are treated as supervisors followed by other wolves known as ω. Omega wolves are treated as soldiers [20, 39].
Encircling prey
This section presents the mathematical model of grey wolf optimization algorithm. Wherein, the prey gets enclosed by grey wolf before getting trapped as illustrated by following equations:
Where r1 and r2 are assumed as random vectors lying in the range of [0 1], the coefficient a varies from 2 (maximum) to 0 (minimum)with increase in number of iterations and is expressed as:
Crntiter and Maxiter refers to the current and maximum number of iterations respectively.
The grey wolves used to search the location of prey with the motive of enclosing them. α wolves take the lead and supervise the hunt, while, the β and δ wolves ‘barely take part in chasing [10]. Places of other search agents get refreshed with respect to the α position for updating the each robot’s location during optimization:
Where Salpha, Sbeta and Sdelta denote best search agents, while psnalpha, psnbeta and psndelta represents the corresponding position vectors. Here, we generates random population of grey wolves in order to initializes the underlying process. With the updated iterations, α, β and δ wolves evaluate the approximate location of the prey, thereby updating its distance from the prey with each iteration. Individual updated positions of α, β and δ wolves are represented by Equations 13, 15 and 17, respectively. However, the mean location of prey is obtained from the refreshed locations of α, β and δ wolves as represented by Equation (18).
The divergence phase for P occurs when P > 1. In case, the value of P lies in the range of [–1 1], the next position of the search agent will fall between the initial and final points. It can be adjusted such that the target position may result in convergence. The convergence or divergence of exploration depends upon the magnitude of P. Exploration converges from the target, if the value of P is smaller than 1, and diverges, if it is greater than 1. As per the analysis, exploration mechanism is driven by separate coefficient vector R, which yields the random values ranging between 0 and 2. If the value of R is considered to be greater than 1, then target gives more emphasis on the random weights, otherwise, target impact gets affected. It helps to avoid the local optima. The optimization process in grey wolf optimization process starts off with a set of initial populations generating the random solutions. The three best solutions are obtained corresponding to α, β and δ respectively. Corresponding to each ω wolf, their current position gets updated using Equations (12) to (18).
Explanation of pseudo code for GWO path planning approach is given as follows:
Modified grey wolf optimization (MGWO)
In modified GWO algorithm, all ω wolves are also included in the hunting process along with δ wolves. Thus, δ wolves form a new family along with ω wolves which is represented by the following equation:
Where, psn4 represents the location of ω wolves, while psn3 (new) represents the location of a new family, which is comprised of δ and ω wolves. In this algorithm, ω wolves ‘position also gets updated similar to that of α, β and δ wolves pertaining to GWO algorithm.
The positions of ω wolves are updated as follows:
The best solution after updation of position is given by:
The pseudo code for MGWO is described as follows:
SA - search agent
In the standard GWO algorithm, Gao et al. [14] proposed the idea of equal contribution of dominant wolves in the searching process as can be seen from Equation (18). However, initially, αis considered to be closer to the prey. Therefore, the can be given higher weights compared to that of β and δ wolves. Authors considered the average weight given in Equation (18) against the social hierarchy of the grey wolves [14]. Based upon this logic, they hypothesized the new strategy as follows:
Initially, α is closest to the prey in comparison to other wolves, therefore has been given maximum weight close to 1 initially, while weights of β and δ is set to zero.
According to Gao et al. [14] initially all the weights assigned to α, β, and δ wolves must vary between 0 and 1 and attains the value of 1 after summation. The proposed rule was incorporated as follows:
Secondly, the weight of α, β, and δ must also satisfy
Where w1, w2, and w3 indicate the weight of α, β, and δ respectively.
Equation (25) demonstrates the highest weight of alpha wolves in the beginning of hunting process due to their closeness to the prey. As time lapse weight of α decreases from 1 to 1/3 due to the involvement of beta wolves. However, the weights of the β and δ increases from 0.0 to 1/3 due to their active participation in the hunting process [13]. The above range has been computed using a cosine function that describes w1 with the angle θ to vary between 0 and arcos (1/3).
The weights should vary with the cumulative iteration number. We know that
Based on above assumptions, a new method of the locations with variable weights is presented as follows:
The Fig. 1 represents the variable weights versus number of iteration.
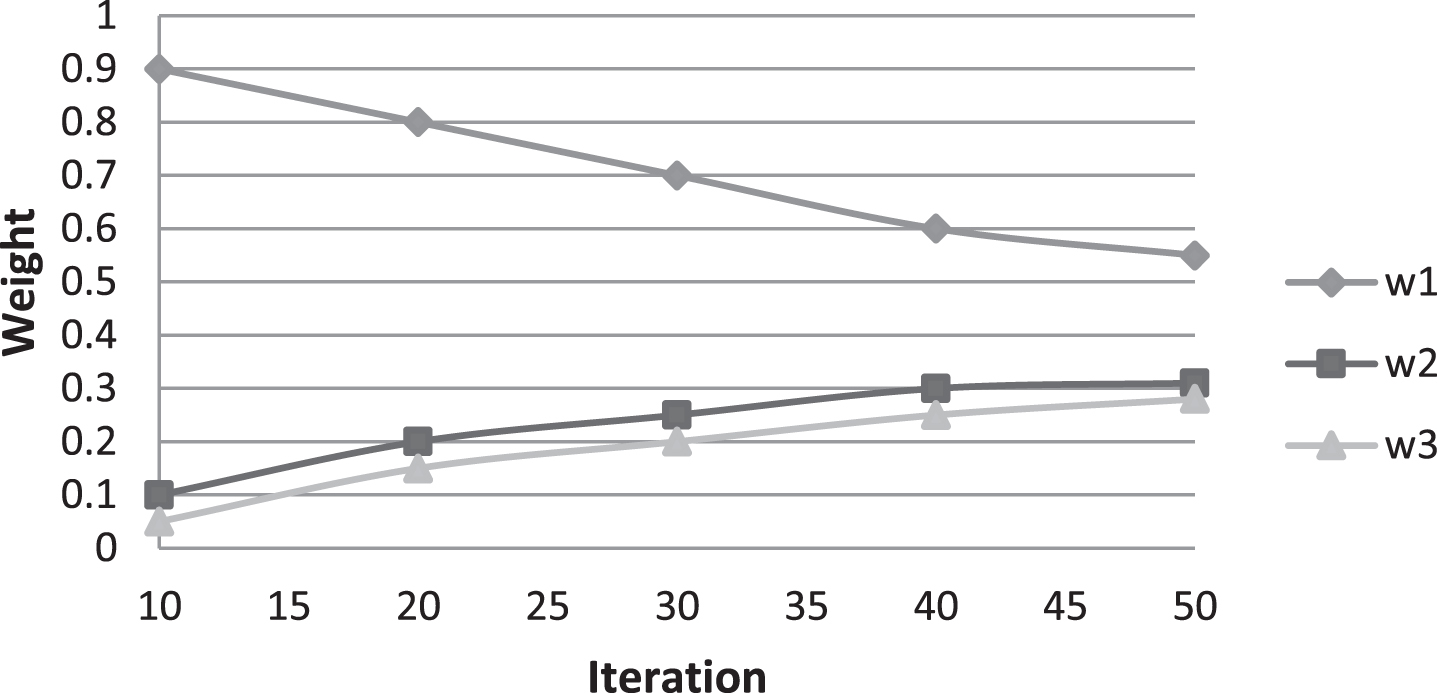
The variable weights vs. iterations.
MGWO algorithms can cause an abrupt change in the retrieved route that might not be followed by robots during navigation. Therefore, it is essential to refine the path of trajectory. The vehicular mobility that is expressed as a speed and displacement of robot is defined as a function of the time using polynomial Equation (29). The fifth order equation with the initial and final values would generate an adjacent route assuming the initial derivatives to be consistent. Thereafter, the derivative of polynomials is computed yielding the successful outcome of the drive. A normal fifth degree polynomial is described as:
The sub-points initiated in the preliminary phase, are considered to be crucial points in the enclosed path during trajectory formation assist the robot to avert any obstacle or hindrance. The speed and movement of the robot traversing with all the points are chosen based on trajectory fitting strategy [37] to generate an appropriate path. The ultimate aim of path planning using MGWO is to acquire an optimal path between initial and target points while avoiding collision between obstacles and robots.
To evaluate the performance of MGWO algorithm, several experiments on six similar robots were conducted in MATLAB 2018a using personal computer with i7 processor and 8 GB RAM. In this work, the algorithms were executed on four different maps as listed in Table 2.
Setting of parameters for 2D path planning
In this section, we have demonstrated the path planning of all robots in 2D workspace using various metaheuristic algorithms. All the algorithms are tested using four different maps and the coordinates values corresponding to these maps are given in Table 2.
We conducted the number of trials to make the exact choice of model parameter values before the actual implementation of the considered algorithms and their parameter values are listed in Table 4.
Parameter values for different algorithms under consideration.
Parameter values for different algorithms under consideration.
The social capability, cognitive capability, and naïve capability are used to characterize the metaheuristic algorithms depends on their attitude to mingle with other candidates. The social strength can be understood as the individual’s capability to grasp from others in the swarm. To possess this quality, one should have to establish an honest communication among people within the cluster. The cognitive strength represents the individual’s strength to learn from its historical experience.
It is very difficult to do the theoretical comparison among different meta-heuristic algorithms merely on the basis of their physical properties, since each metaheuristic algorithm possess its own property to deal with a particular problem. Table 3 provides the description of parameters which are used for different metaheuristic algorithms under study.
In this section, we present the simulation results of different variants of GWO including PSO and IBA for four maps with six robots; wherein each map contains 6 to 8 obstacles.
The MGWO method was run on all the four maps and the obtained results were compared with four different metaheuristic approaches viz., PSO [26], IBA [31], GWO [10], and VW-GWO [13]. The execution time corresponding to Map 1, 2, 3, and 4 is listed in Table 5, 6, 7 and 8 respectively. For these maps, number of iterations and population size were set to 25, 30 and 40, 45, respectively.
Average time taken (in sec.) and distance covered (in cm.) of different techniques of Map 1 for varying number of iterations and population size
Average time taken (in sec.) and distance covered (in cm.) of different techniques of Map 1 for varying number of iterations and population size
BC-Best cost, R - Robot.
Average time taken (in sec.) and distance covered (in cm.) of different techniques of Map 2 for varying number of iterations and population size
BC-Best cost, R - Robot.
Average time taken (in sec.) and distance covered (in cm.) of different techniques of Map 3 for varying number of iterations and population size
BC-Best cost, R –Robot.
Average time taken (in sec.) and distance covered (in cm.) of different techniques of Map 4 for varying number of iterations and population size
BC-Best cost, R - Robot.
Figures 6 and 7 shows the average best fitness cost and execution time for varying number of iterations and population size for all the four maps. It can be observed that the MGWO approach yielded the better results compared to the most of the other metaheuristic approaches. The Figs. 2, 3, 4, and 5 illustrates the robot movement and paths generated by the algorithms. The trajectory relies on the path smoothness and MGWO optimization strategy.

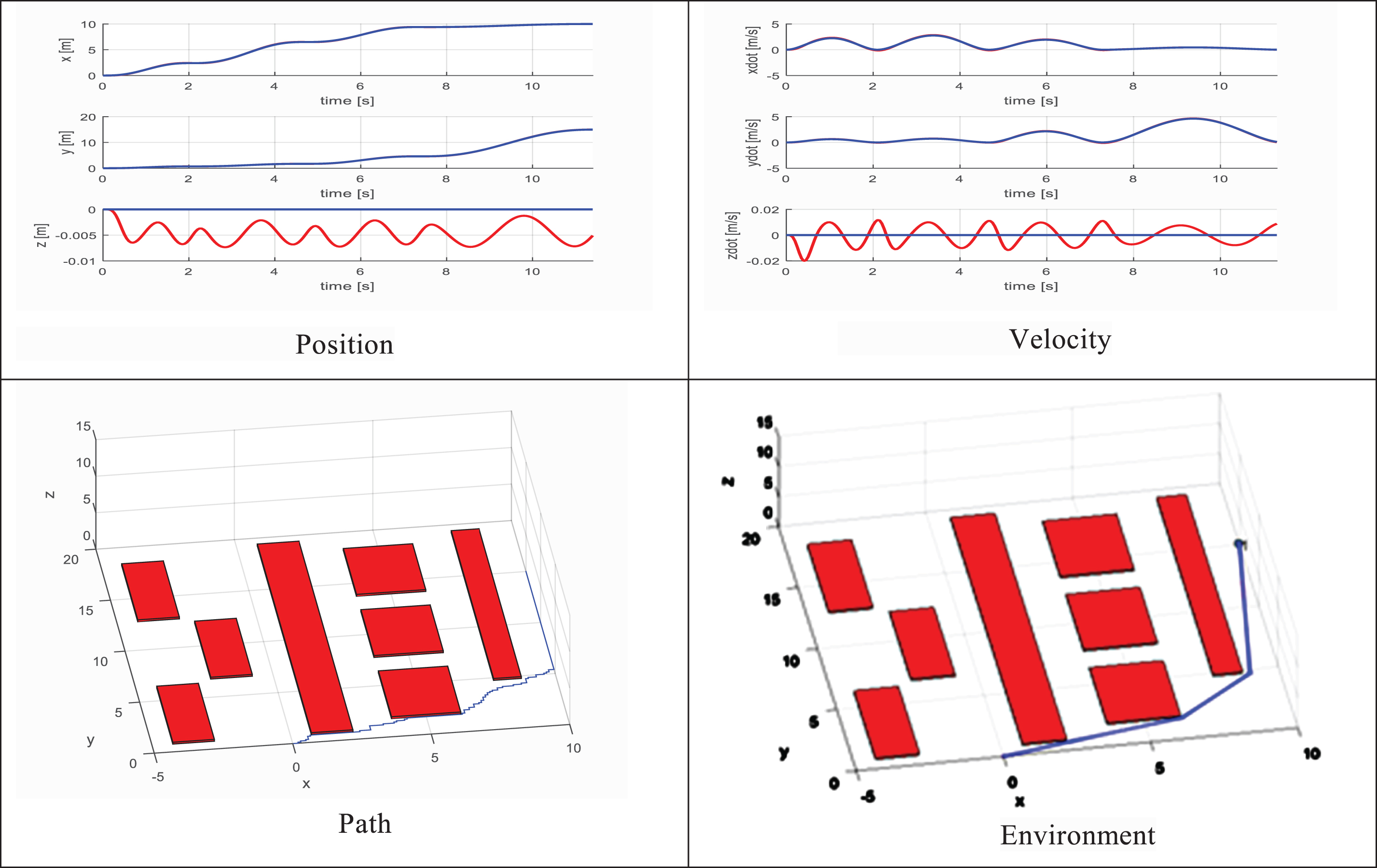
Map 1 Path planning for Robot 6: (0.5, 0.5, 0) –(20, 10, 0).
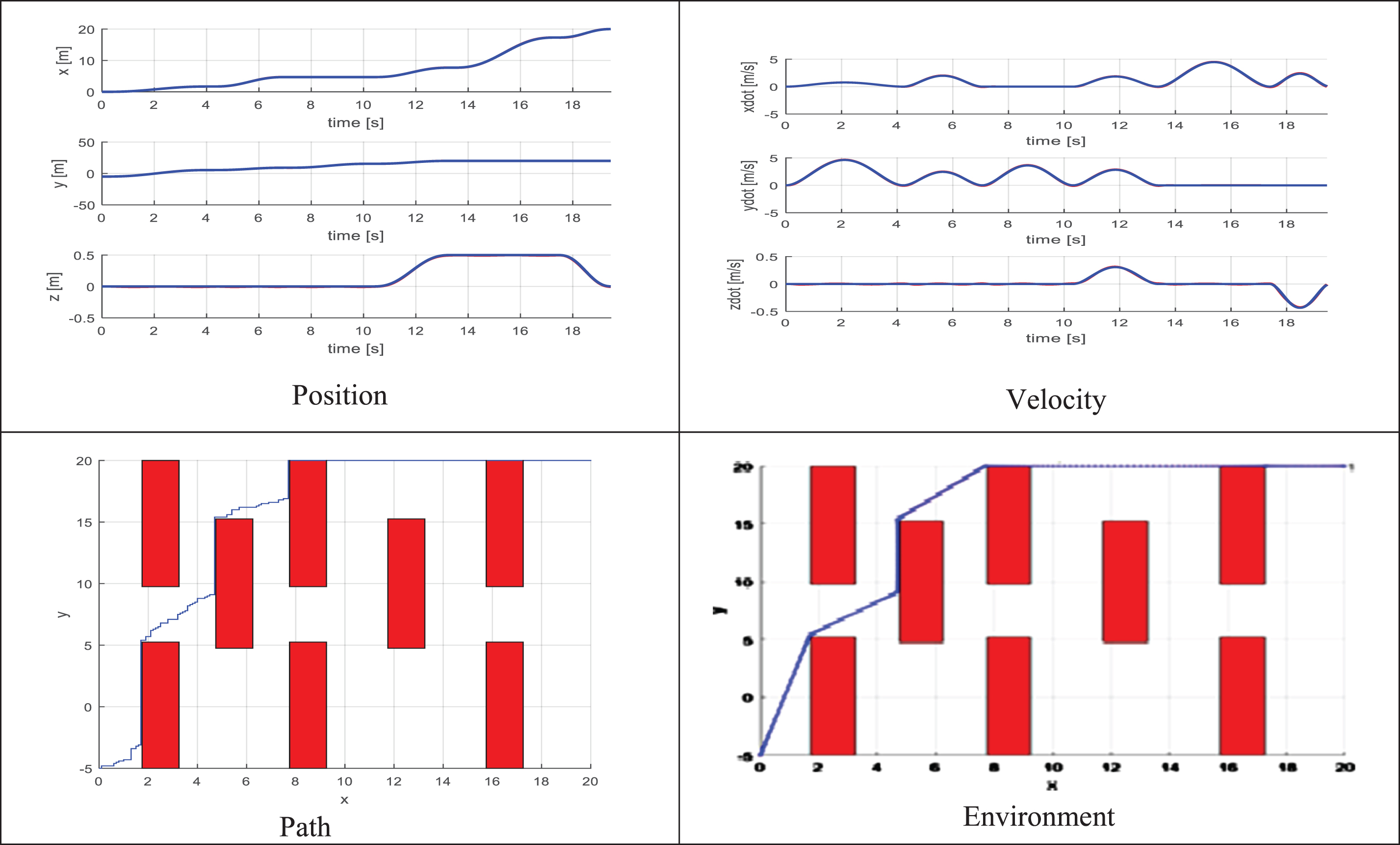
Map 2 Path planning for Robot 3: (0, 0, 0) –(10, 15, 0).
Map 3 Path planning example for Robot 1: (0,-5, 0) –(20, 20, 0).
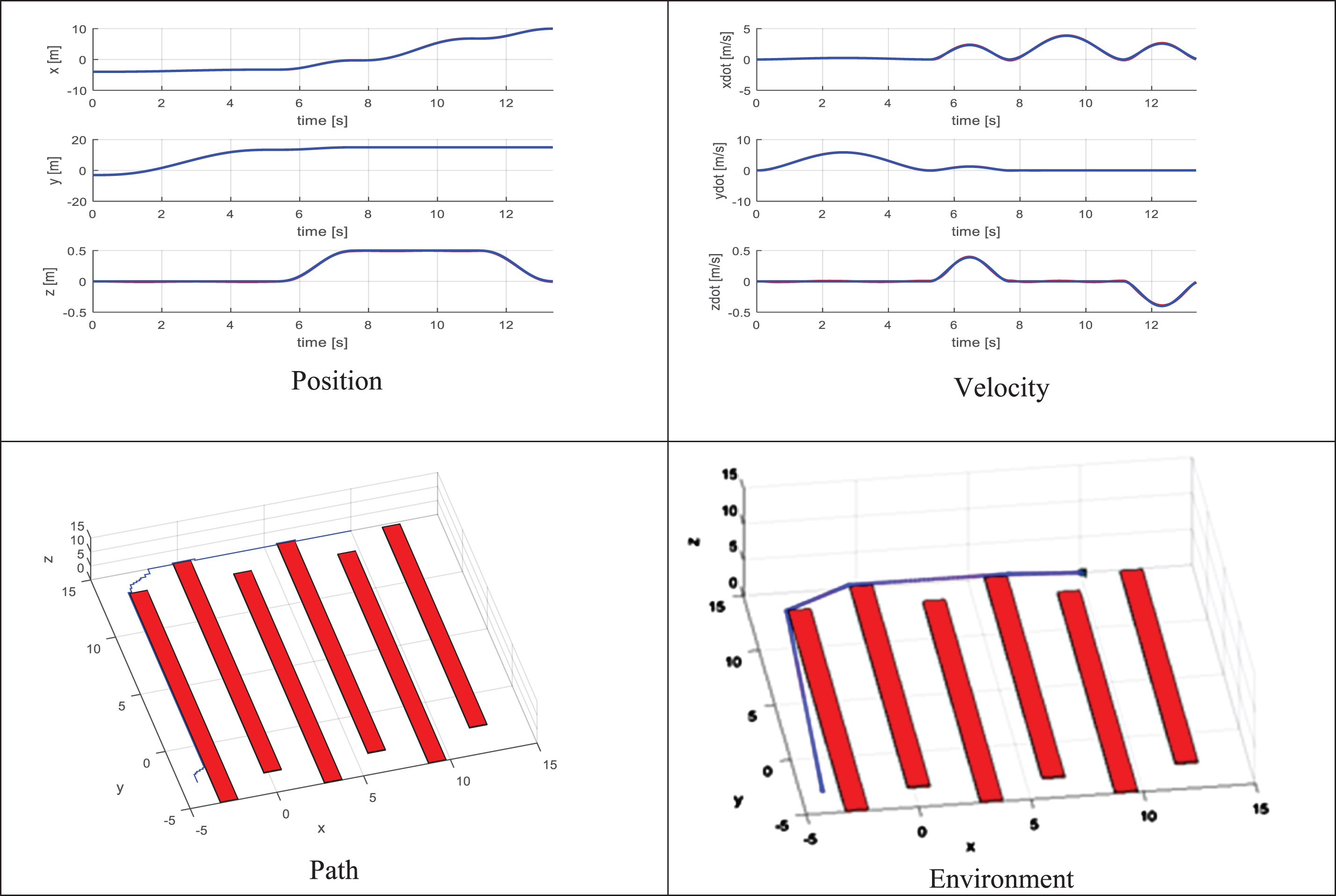
Map 4 Path planning for Robot 1: (–4, –3, 0) –(10, 15, 0).
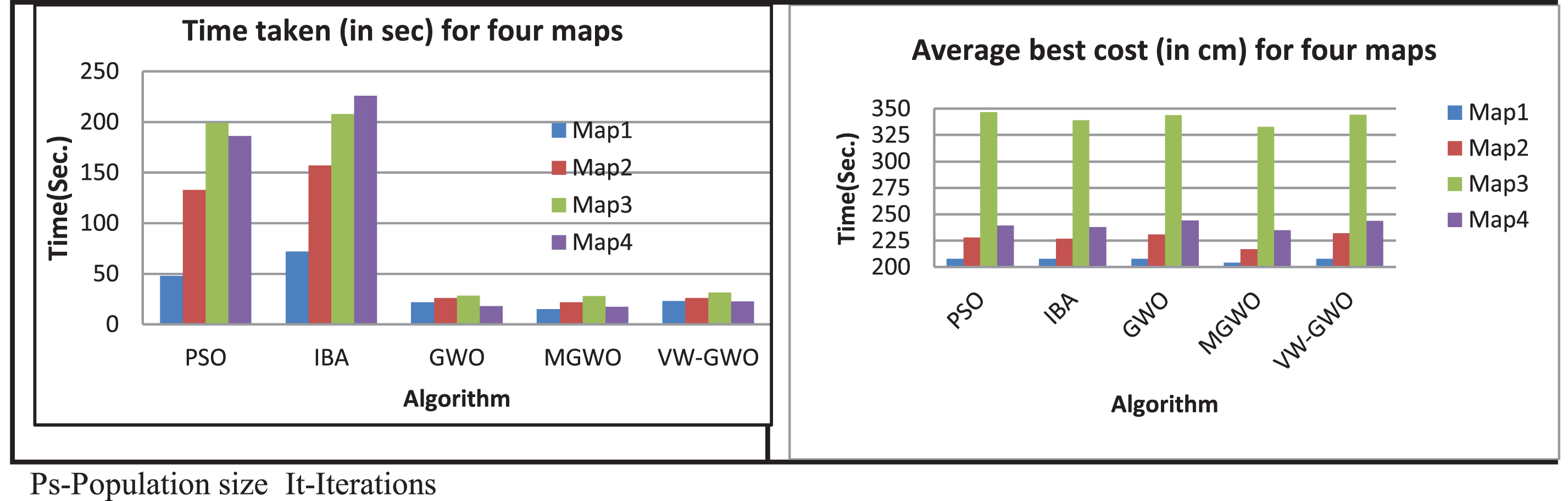
Average best cost and execution time analysis for Map 1, Map 2, Map 3, and Map 4 (Ps = 25, It = 40).
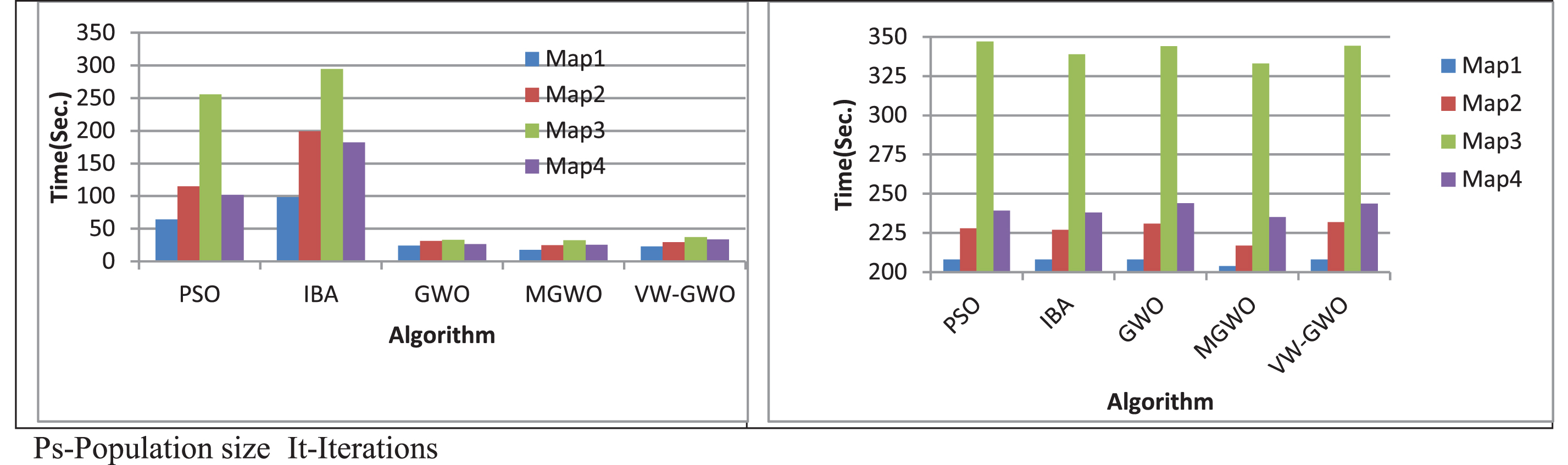
Average best cost and execution time analysis for Map 1, Map 2, Map 3, and Map 4 (Ps = 30, It = 45).
The execution time of the proposed algorithm is compared with PSO, IBA, GWO, and VW-GWO algorithms for generating a feasible route from the initial point to target point. The algorithm works in such a way that they are able to generate the routes between desired ends for all the grid maps.
From Tables 5, 6, 7 and 8 it was noticed that the MGWO algorithm took the less time and performed well, compared to other metaheuristic algorithms under consideration in almost all the cases. MGWO outperformed over GWO, while, VW-GWO yielded relatively better results with respect to execution time and average best cost over other techniques.
From the results given in Tables 9, 10, 11, and 12 it can be noticed that the MGWO algorithm yielded an optimal result with less number of iterations without any obstruction in the workspace. However, more number of iterations are required for convergence with increase in number of obstructions in workspace. Figure 8 reflects the drastic reduction in the average best cost of various algorithms for different number of iteration (1 to 10). From convergence analysis shown in Fig. 8, it can be observed that some points of MGWO algorithm overlaps with other metaheuristic algorithms for Map 1 and Map 2, respectively. However, for Map 3, overlapping occurs for higher iterations (30 iterations) and it is almost negligible for Map 4. Some robots may fail to reach to the destination point in case of iterations smaller than 10. The initial best cost is higher for IBA algorithm with Map 1, Map 2, and Map 3, while it is higher for VW-GWO algorithm for Map 4. A little difference is observed in the execution times of different meta-heuristic algorithms for Map 1 and Map 4, as presented in Table 9, 10, 11 and 12, respectively. However, this gap enlarges for Map 2 and Map 3 due to presence of more number of obstacles in these maps. All the considered algorithms were run 100 times to get the average time and average best cost. The above results demonstrate that MGWO algorithm gives better performance than other state of art methods. Hence the proposed approach seems to be more competent than other approaches taken under consideration for multi robot route planning applications.
Average best cost (in cm) per iteration count for Map 1
Average best cost (in cm) per iteration count for Map 1
Average best cost (in cm) per iteration count for Map 2
Average best cost (in cm) per iteration count for Map 3
Average best cost (in cm) per iteration count for Map 4
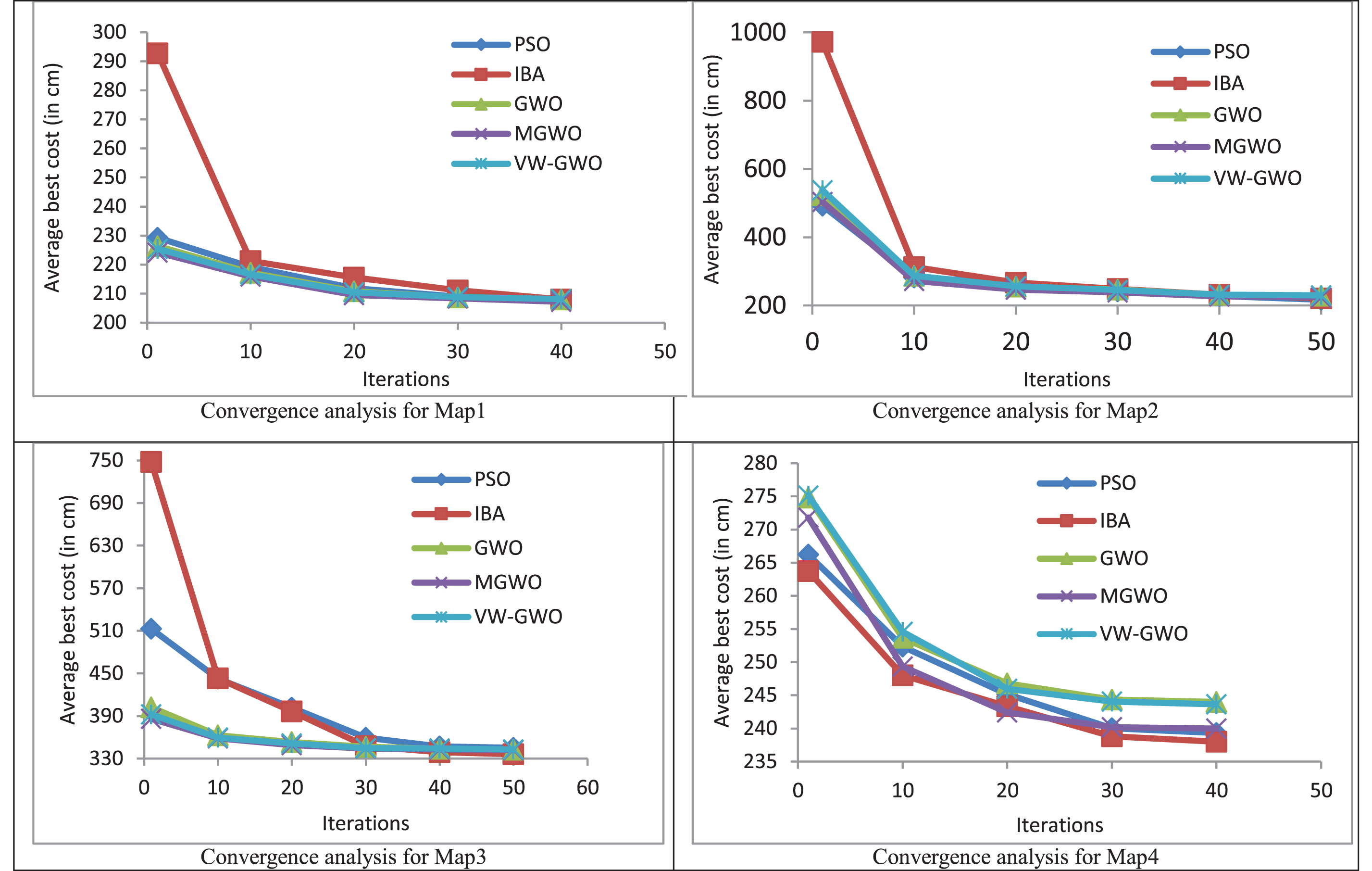
Convergence analysis graph for Map 1, Map 2, Map 3, and Map 4 using MGWO algorithm.
MGWO algorithm possesses the following advantages over other algorithms: (i) flexibility, (ii) simplicity, (iii) induction free technique, and (iv) avoidance of local optimum. Simplicity means it requires comparatively less variables to manage the algorithm. Flexibility denotes the applicability and suitability of MGWO algorithm to various kinds of problems without any modification in the algorithm. In contrast with gradient based optimization methods, Grey Wolf Optimizer and its variants possess good capability to optimize the problems stochastically. In former case, there is need to compute the derivative of search spaces during the optimization process. Whereas, in later case, no derivative is needed to compute. MGWO technique can be efficaciously used for real problems with unknown by-product information.
Stochastic nature of MGWO algorithm makes it more compatible for local optima avoidance compared to the traditional optimization methods. Owning to this, MGWO algorithm becomes highly competent for solving nonlinear, multivalued, and interdisciplinary function optimization problems. The recent study [11] has also proven the efficacy of the MGWO algorithm for solving the transmission network expansion planning (TNEP) problem. This problem is a non-linear programming problem for mixed integers. The chances of MGWO algorithm for getting trapped into local minima reduces significantly due to less number of parameters in comparison to other meta-heuristic algorithms.
Wolpert et al. [38] presented No Free Lunch (NFL) hypothesis. According to NFL hypothesis, there is no meta-heuristic technique that may best deal with all sorts of optimization problems. Especially, a particular algorithm may produce excellent results for a specific type of problem; however, the same algorithm may not yield good results for different kind of problem.
As we do not have prior knowledge about the algorithms, which algorithm would be most suitable for solving any specific optimization problem. Here, in this work, various biologically inspired techniques are tested to resolve the actual multi robot route planning assignment. We undertook many algorithms such as PSO, IBA, GWO, and VW-GWO to resolve the robot’s route planning problem and found MGWO technique to be most suitable for this particular application. Hence, in this paper, MGWO algorithm is recommended as a most competent and preferred algorithm for solving multi robot route planning issues.
To solve the multi robot route planning issue, some theoretical points are needed to be taken into consideration about MGWO [11, 44]: The uncompromising social structure facilitates MGWO algorithm to obtain the faster optimal answer with the growing range of iterations. Parameter of MGWO allows robots for the smooth transformation between exploitation and exploration. As we increase gain of P, initially, about 50 percent of the iterations are committed to the search space exploration and rests of the 50 percent iterations are committed to converging into respective target location. There is only one variable in MGWO algorithm that needs to be regulated in the robot route planning task.
The proposed method is compared with the work of various researchers who have contributed to the field of robot path planning. The results are provided in Table 13. However, the proposed method is not directly comparable with those of TLBO-ANFIS and FF-CPSO methods due to consideration of different map structures, simulation environment, number and size of obstacles, and hardware configuration used by different researchers. The results provided in Table 13 presents that our method gives better performance in comparison to other methods such as VW-GWO, GWO, and BAT when implemented on same hardware.
Performance comparison of the proposed method with current state of art methods in terms of average execution time, and average speed
Performance comparison of the proposed method with current state of art methods in terms of average execution time, and average speed
This study presents a better solution for a route planning strategy of multiple robots based on modified grey wolf optimization (MGWO) algorithm. The proposed algorithm was able to identify an optimized track between the initial point and destination points while keeping optimal terrain constraints with static barriers. In this algorithm, we carried out simulation for different route tracks using four maps and six robots in order to seek the most feasible solution for multi robot path planning based on the social and optimized behavior of grey wolves. The proposed approach leads to the faster convergence and local optima avoidance, resulting in less computational cost and higher efficacy in comparison to other state of art methods. The presented approach utilizes minimum parameters, thereby improving the speed of convergence.
From the experimental results provided in the paper, we infer that the MGWO algorithm is more competent and suitable for muti-robot route planning problems compared to other state of art methods. Hence, authors recommend it for this particular robotic application. However, the speed performance of the algorithm might get affected on increasing the complexity of simulation environment (i.e. with more than eight obstacles) subject to confirmation through conduction of more number of experimental trials with varying size, shape and number of obstacles. The efficacy of the algorithm could be further enhanced by using reinforcement learning during exploration and exploitation process and may be adopted as a possible solution to the problem. As a future work, it could be interesting to extend its application to develop an efficient path planning model for UAVs in dynamic environment.