
Abstract
A Wireless Sensor Network (WSN) is divided into groups of sensor nodes for efficient transmission of data from the point of measuring to sink. By performing clustering, the network remains energy-efficient and stable. An intelligent mechanism is needed to cluster the sensors and find an organizer node, the cluster head. The organizer node assembles data from its constituent nodes called member nodes, finds an optimal route to the sink of the network, and transfers the same. The nomination of cluster head is crucial since energy utilization is a major challenge of sensor nodes deployed over a hostile environment. In this paper, a fuzzy-based Improved Harris’s Hawk Optimization Algorithm (IHHO) is proposed to select an able cluster head for data communication. The fuzzy inference model ponders balance energy, distance from self to sink node, and vicinity of nodes from cluster head as input factors and decides if a candidate node is eligible for becoming a cluster head. The IHHO tunes the logic into an energy-efficient network with less complexity and more ease. The novelty of the paper lies in applying the hawk-pack technique based on fuzzy rules. Simulations show that the combination of Fuzzy based IHHO reduces the death of nodes through which network lifetime is enhanced.
Introduction
The most prominent solutions of measuring the environment where the human can never interfere like dense forests, chemical plants, animal monitoring, etc are carried out by WSNs. They are useful in applications where continuous monitoring by a human is not possible. This demand for WSN makes it more versatile. WSN enables the deployment of sensor nodes.
The prerequisites of these systems are simplicity of sending, long framework lifetime, and low-idleness information exchanges. The primary duty of a sensor node in a sensor field is to identify events, perform snappy neighbourhood information handling, and afterward transmit the information [1].
There are two types of communication, namely –direct and indirect communication. Direct communication is accomplished out where the sensor node computes the measured data to BS directly since the sensor node and BS are within the radio coverage of each other. The data diffusion process is followed out through various intermediate nodes referred to as cluster head (CH). The data transfer from the cluster head to the base station is performed since the sensor node and base station are far away from each other in indirect communication. Sensor nodes in the sensing region own limited battery, limited transmission range or radio coverage, and limited memory.
Routing the sensed data and selection of CH is the chief course of action in any WSN [2]. The selection of CH shall be based on energy, coverage, memory, etc. Here, we propose optimization based on energy efficiency. Coverage, memory, and reliability are not under the scope of the current research work.
Evolutionary computation is used in solving many multi-objective optimization problems. In WSN the routing of the data is modelled as an evolutionary computation problem that maximizes the node & network lifetime and improves the throughput and reduces the end-to-end delay. Many cluster head selection algorithms were proposed by numerous authors to maximize the node and network lifetime. All of them are categorized into two broad categories, namely - distributed and centralized. In distributed algorithms, all the nodes actively participate in data transmission leading to faster energy loss. Such kind of algorithms like LEACH, BSDCP are used where the location information of nodes are not aware. In the centralized technique, the data transmission is based on collecting up data by a common node and transmits them. The cluster head selection in centralized algorithms increases in network lifetime as it selects and the cluster head based on the node with the highest remaining energy. In contrast with the distributed algorithms, these algorithms require location information about the nodes as in LEACH-C.
The primary function of CH is to gather the data from the sensor nodes and forward it to the BS or succeeding level CH. The most noticeable thing here is access to the parameters to select the CH and access the qualities of the clusters. Each cluster may consist of two groups of members, CH, and non-CH sensor nodes. These non-CH nodes may act as a common node to one or more clusters. Hence in CH selection and Cluster formation, there have been many parameters used such as density, the distance between node and CH, number of hops, and remaining energy of the node.
The objective of routing in WSN is to discover the optimal path from the cluster to the BS to send the gathered information. Though several protocols were proposed previously by various researchers, every algorithm has its own pros and cons. Most of the existing works involve in providing a feasible solution to achieve energy efficiency, still the research remains enduring. In this work, an evolutionary algorithm called Improved Harris Hawk optimization (IHHO) is proposed, which is used in optimum CH selection using various parameters such as the energy of sensor nodes, number of hops, channel capacity and signal strength, etc. Fuzzy logic is employed in deciding the CH by taking energy, the distance between sensor nodes, and BS and vicinity as input parameters. This hybrid approach is simulated and arrived at conclusions that show the improvement in the network performance when compared with existing protocols.
Related work
Shi et al. [3] proposed a fuzzy-based approach in WSN to improve the stability by reducing the packet loss and time delay. The authors applied augmented Lyapunov and linear matrix inequality model to solve the uncertainty using the robust H∞ property. The accuracy and precision of WSN was greatly improved using the Fuzzification approach and was numerically proved.
Jayashree Agarkhed et al. [4] implemented a fuzzy-based reliable routing method where the cluster heads combine together and select a super cluster head using fuzzy approach. The authors considered attempt rate, cost function, energy and distance are the parameters. Path reliability and end-to-end delay of the network, transmission of data with less energy utilization was observed in the results discussed.
Sinha et al. [5] proposed a novel intrusion detection system with fuzzy and neural network to detect denial of service attack to evade them exploit network susceptibility. The proposed work monitors the node behaviour and finds out whether the node is trust or enemy node with less overhead. Fuzzy logic enhances the accuracy of the system and a neural network filters the false alarms generated by fuzzy system. Results were arrived using NS2 simulator tool that ensured 0%false positive.
Mehra et al. [6] addressed the issue of energy hole due to the premature death of nodes nearer to base station. The authors developed E-FUCA protocol that ensures unequal clustering based on fuzzy rules applied over vital parameters. The cluster heads were nominated such that they have never been a cluster head before. Fuzzy logic was applied to determine the next hop of data to perform efficient routing. Results showed that the proposed work outperformed better than the existing works in terms of energy balancing, network lifetime improvement and increased stability period.
Houssein et al. [7] applied the Harris Hawk Optimization technique in obtaining the sink node in large scale WSN. The position of the hunting Harris hawk is compared with the position of the sink node. Fitness function was computed using mean, standard deviation, best and worst fitness values. The location of the sink node was optimized using the Prim’s algorithm. Various other metaheuristic optimization algorithms such as PSO, GWO, and WOA etc were compared and results were tabulated by implementing them on different count of sensor nodes.
Fariba et al. [8] presented a new multi-objective optimization mechanism for medical supply chain network to maximise the reliability and reduce the delivery time and total cost of products to hospitals and pharmacies. A mathematical model using Improved Social Engineering Optimization (ISEO) and Hybrid Firefly and Simulated Annealing Algorithm (HFFA-SA) has been proposed to attain maximum performance and balance the supply chain process. Evaluation results project that the proposed model provides a reliable approach to solve the aforesaid problem.
Fariba et al. [9] developed a mathematical model based on three meta-heuristic optimization approaches such as ant colony optimization, fish swarm algorithm, and firefly algorithm to solve the neighborhood search problem and balance supply chain network in pharmaceutical industry. Experimental results show that hybrid fish swarm algorithm provided better solution to solve neighborhood search problem.
Goodarzian et al. [10] used mixed-integer nonlinear programming and chance-constrained programming models to solve the supply chain network in reducing the cost of carbon emissions. The authors proposed two meta-heuristics approach H-1 and H-2 to reduce the total cost of carbon emissions. The proposed algorithms are evaluated against Taguchi approach. The empirical results show that the H-2 approach was found to be more efficient than the other approach.
M.A. Hossain et al. [11] developed an efficient routing algorithm, CR-VANET to avoid congestion in vehicular ad hoc network. The authors presented a two-hop multi objective routing technique that implements only two hops to transfer data instead of multiple hops. The approach also ensured route stability and successful data transmission. The results were generated using OMNET++tool that showed better throughput and packet delivery, reducing packet loss rate and communication overhead.
Fariba Goodarzian et al. [12] proposed a bio-objective optimization model that reduces the service time and total cost in home health care application. The authors developed an Improved Social Engineering Optimizer to meet out the objective. The results were compared with firefly and artificial bee colony algorithms that proved that the proposed work achieved increased performance.
Amin Abdollahi Dehkordi et al. [13] presented Nonlinear based Chaotic Harris Hawks Optimization technique to enhance the performance using a variety of chaotic maps in Internet of vehicles. The proposed work demonstrated better results in solving uni-modal and multi-modal functions in autonomous vehicles. It was found to be 100%consistent improvement with the increase in dimension sizes from 100 to 1000. It proved to be a capable technique for a variety of applications in solving optimization problems related to IoV.
Fariba et al. [14] proposed a location-production-distribution-transportation-inventory holding problem for medical supply chain networks. The approach used Ant colony optimization and Improved harmony search algorithms to solve the medical supply chain problems. The presented approach demonstrated high quality efficiency and performance with a near optimal computation time.
X. Li et al. [15] combined ACO with Artificial Fish Swarm Algorithm (AFSA) to improve routing in WSN. The AFSA inspired by the food searching pattern of fishes based on vision and other senses, is implemented to find an optimal route to reach the base station in faster manner; whereas the ACO is applied to select a random route from a set of feasible route developed by AFSA. Route finding is computed by modelling the preying and swarming behaviour of artificial fishes mathematically. In a 1000m2 geographical sensing field-deployed with 500 nodes, the initial route discovery and route converging time are found to be higher than EEABR, IACO, and SensorAnt techniques.
Damodar Reddy Edla et al. [16] presented a fitness function to stabilize the load of the gateway node using the Shuffled Frog Leaping Algorithm (SFLA). The technique introduced five phases consisting of Initialization, fitness evaluation and sorting, memeplexes and sub-memeplexes phase formation, convergence checking phases. Based on these phases, descendants’ generation is performed and a better frog leap is obtained after the censorship phase. Simulations were performed using a 50 m x 50 m network of 100 sensors and 11 gateway nodes. Energy consumption was found to be not as much of previous works.
Van-Oanh Sai et al. [17] proposed an efficient node localization mechanism for proper placement of sensor nodes based on behaviour of fireflies. Initially, the population is divided into groups of fireflies. A fitness function is proposed to evaluate them. It updates the location of fireflies by comparing the light intensity of one with the other. The best fireflies are obtained after mutation and replacement of underprivileged fireflies with the best ones. Experimental results portray that the work achieves better node placement than PSO and GA.
Ding W et al. [18] developed a comprehensive model for monitoring cardiomyopathy patients through sensors and wearable devices. The authors hybridized AI with fuzzy approach to implement a novel optimized model to increase the coverage of monitored patients by redistributing sensors in the observed area. To handle the sensed data accurately and reliably, wearable sensing data optimization was used. Results specify that the proposed work can efficiently filter the sensing data with high accuracy rates and low time cost.
Fariba Goodarzian et al. [19] proposed Mixed-Integer Non-Linear Programming model and developed a novel robust fuzzy programming method to address the uncertain parameters in pharmaceutical supply chain network. Several multi-objective meta-heuristic algorithms were considered to observe various criteria and metrics. Results showed a near optimal solution with better efficiency.
H. Ye et al. [20] used Harris Hawk Optimization to optimize Fuzzy-KNN algorithm to develop a prediction model to discriminate and categorize the sternness of COVID-19 as severe or mild. The proposed work was compared with other machine learning algorithms and the training accuracy was found to be more optimized in HHO-FKNN with feature selection than HHO-FKNN without feature selection, GWO-FKNN with feature selection and without feature selection.
M. Collotta et al. [21] offered a protocol for multimedia communication in thick WSNs which offers efficient bandwidth and ideal energy depletion. Fuzzy logic is emphasized to determine when to power down the WiFi nodes when they are idle. The results prove that the fuzzy-based approach performs well in terms of consumption of battery power.
Z. Zinonos et al. [22] offered a protocol for mobility management in WSN. Here the fuzzy logic system is adopted to manage the sensor mobile nodes to decide when to use the handoff mechanism when the sensor MN moves from one cluster to another. It performs well in terms of minimum loss of information, reduced delay time, and increases the consumption of energy.
In this paper, a novel nature-inspired optimization algorithm named Improved Harris Hawk Optimization is proposed based on the intelligence of the Harris’s Hawk bird to forage for prey. Numerous other metaheuristic approaches such as Grey wolf optimizer, Lion Optimization technique, Tabu Search and Cuckoo search optimizations, etc that focus on providing candidate solution to optimization problems. The existing algorithms face few drawbacks such as (i) randomness in the initializing the population, (ii) evaluating the fitness function for every candidate in the population with less overhead, (iii) failure in providing optimal solution, and (iv) fail to reduce the search space. The selection of the proposed algorithm is mainly inspired from the prey capturing nature of the Harris’s hawk birds which is commonly known as “seven kills” strategy. The significance of implementing proposed algorithm includes the dynamic decision making nature of the hawks to capture its prey and the development of several variants of the approach to apply for multiple applications. A stochastic metaheuristic model is constructed to find an optimized way to address the network longevity issue.
Chapter 3 presents the basic Harris’s Hawk behavior and the mathematical model of the bird’s hunting nature. Chapter 4 portrays an Improved Harris’s hawk optimization algorithm based on a hybridization of Differential Evolution with Harris’s hawk Optimization. Chapter 5 gives a picture of the Fuzzy based cluster head selection using Improved Harris’s Hawk optimization. Implementation results are discussed in Chapter 6 and the final conclusion and future scope are furnished in Chapter 7.
Harris’s hawk optimization
Harris’s Hawk Optimization (HHO) algorithm is a bio-inspired behaviour modelling based optimization technique instigated by the hunting manners of Harris’s Hawk.
Harris’s hawk behaviour
Harris’s hawks have vision power eight times more than of human beings during daytime. The hawks live in casts with communities and hunt a prey cooperatively. Due to their pack approach, these birds can even hunt a prey which is faster and weights two times more like jackrabbits. Both male and female hawks engage in hunting. They use their tails for communication and tap its tail to make attacks or run behind the prey. Based on the defending style of the prey and the condition, the hunting style of hawks differs.
Hunting technique
The Harris’s hawks back-stack on each other while waiting for pray. The dominant hawks sit at the bottom with recessive on the top and fix the prey to be hunted using their sharp vision. They evaluate the prey and decide whether to hunt individually of in group based on the prey size. When the prey size is lesser then the hawks individually attack them. Else, the hawk calls the other birds of the same community for hunting [23].
Harris’s Hawk.
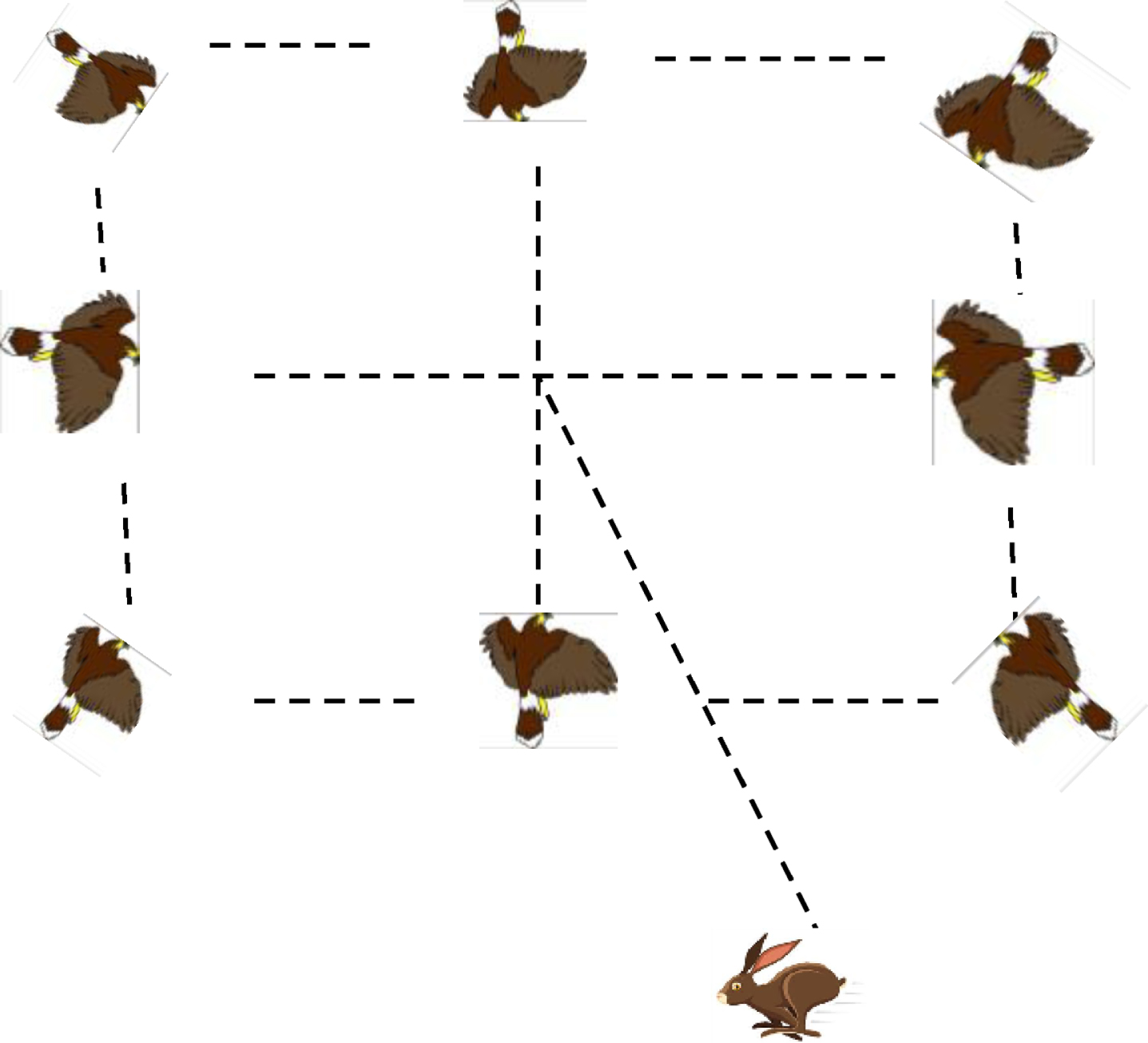
The male hawks first fly behind the prey making leap-frog over the region. They split and rejoin themselves to chase the prey. The prey animal after losing all its defending power shall become weary at a point of time, after which it will be suddenly pounced by the dominant female species. This strategy is referred as seven-kills. The unique feature of Harris’s Hawk is that they plan, assault and congregate from different directions in a cooperative manner. The one who catches the prey is the female leader hawk that shall mantle it until other hawks comes to share its food so as to protect their meat from being stolen.
The Harris’s Hawk Optimization (HHO) Algorithm possesses two phases as the traditional HHO, namely –exploration and exploitation. The phases were proposed based on the actions such as detection of prey, swooping up on prey and the different assaulting strategy of the Harris’s wolf. Figure 2 portrays the two phases of HHO.
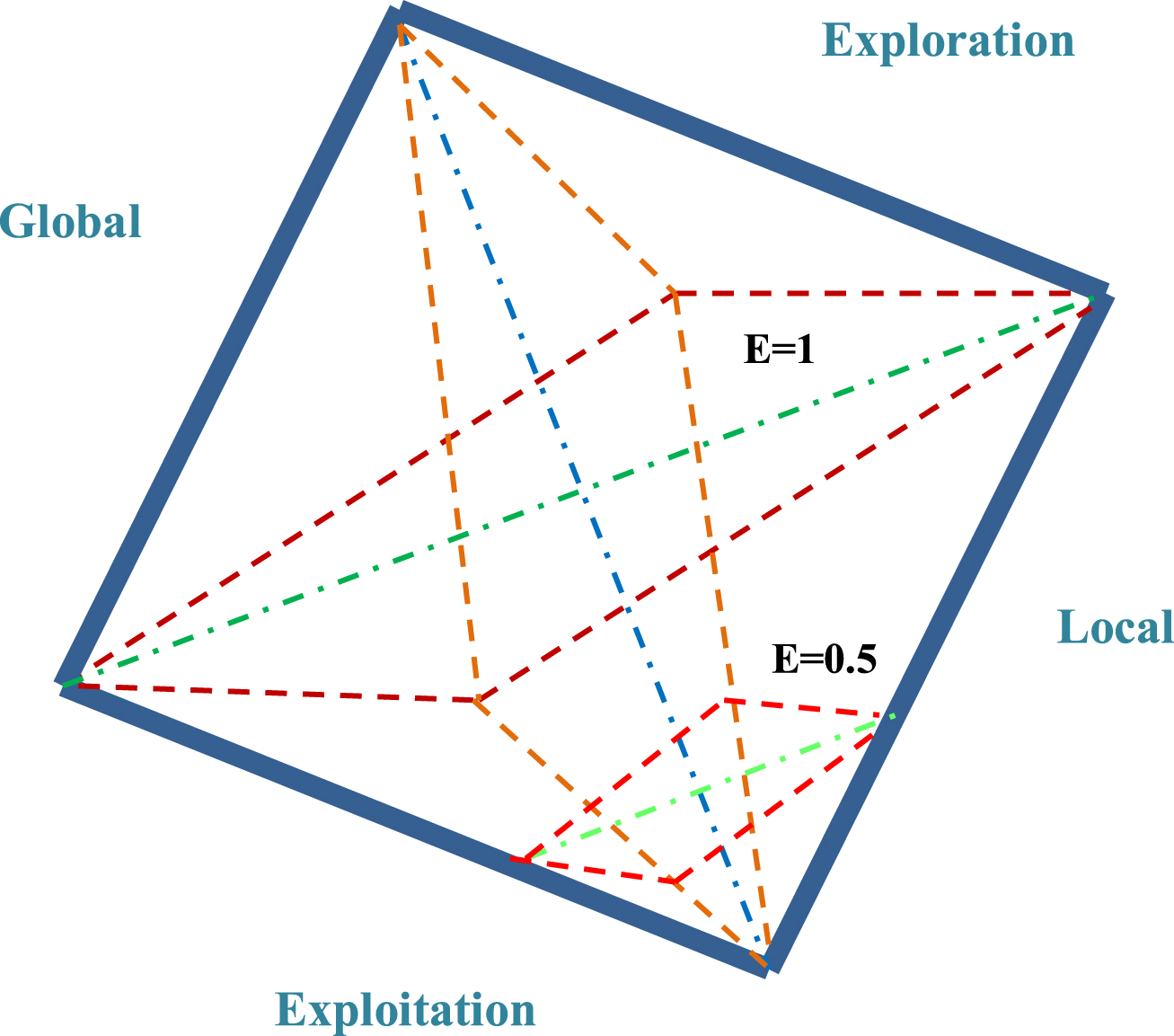
Phases of HHO.
The Fig. 2 signs that, when the energy value≥1, then the algorithm is in exploration phase where the hawks finds its position to perceive prey for its dinner. When the energy value < 1, it shows that the algorithm undergoes exploitation phase that finds an optimal solution to catch the prey.
There exists an intermediate transition phase that works upon the evolution from exploration to exploitation stage.
During the exploration phase, exploration of prey in arid region is carried out by the Harris’s Hawk. In HHO, obtaining the optimal solution or near optimal solution (prey of the Hawk) is the aim of algorithm which is selected from candidate solutions (Harris’s Hawks). Two strategies are followed to roost and sense (visually) the prey. The first strategy (Probability, p < 0.5) is based on the sitting positions of hawks with respect to the members of the cast.
Pi(t + 1) is the position of ith individual for the next iteration, Prandom(t) be the Harris’s hawk that is randomly selected from the cast and r1, r2 are random numbers between (0, 1). This action is mathematically modelled as given by Equation (1) as follows.
The second strategy (Probability, p≥0.5) is a random order of perching of hawks on tall trees and search for prey. The behaviour is mathematically modelled as given by Equation (2).
Pi(t) denotes the current position of the Harris’s Hawks and N is the total population of Hawks in the cast.
Now the Harris’s Hawks have predicted the prey and the next is to chase behind them to make them tire out of energy. The prey (jackrabbit) tries to escape from the hawks and shall run quickly. This makes the rabbits to exhaust and lose all its energy. The scenario is modelled in Equation (4). Let Einit is the initial energy of the jackrabbit and Eesc is the Energy spent by the rabbit to defend against the hawk and away from it.
Here T is the total number of iterations and t is the current iteration being run. Einit is a random energy level between (-1, 1). When the energy falls between (-1, 0) range, it specifies that the prey is deteriorating and shall exhaust at any point of time in near future. When the energy range is between (0, 1), it signifies that the prey is reinforcing much against the attackers.
The exploitation phase deals with the chase and kill of the jackrabbit by the Harris’s Hawk. The phases of HHO are as follows. Soft surround Hard surround Soft surround with progressive rapid dives Hard surround with progressive rapid dives
Here assume r which is any random number between (0, 1). Based on the r and E values the above strategies are proposed as follows.
3.3.3.1. Soft surround. This is the condition where r≥0.5 and E≥0.5. It indicates that the jackrabbit has sufficient energy to escape from the hawk, but it fails to achieve due to some deceptive hops. Hence the Hawks misleads the prey and performs a surprise-pounce upon it. This can be given by P(t + 1) in Equation (5).
3.3.3.2. Hard surround. This is the condition accomplished when r≥0.5 and E < 0.5. This is encountered when the prey loses all its energy and surprise-pounce is in near future. Therefore, no much effort is put forth by the hawks and their food is on the way. Equation 8 provides the mathematical model of the strategy.
3.3.3.3. Soft surround with progressive rapid dives. This is the condition is an intelligent case as it is accomplished when r < 0.5 and E≥0.5. It indicates that the prey has sufficient energy to escape from the Hawk. The Hawk enforces soft surround before performing surprise-pounce.
The hawk follows leapfrog and Levy Flight strategies to attack the jackrabbit. An intelligent soft encircling can be modelled as follows.
If the above action fails, the Harris’s Hawks implement a hasty, unexpected and irregular movement to corner the jackrabbit known as Levy Flight. It is formulated in Equation 10.
The above function possess two random variables u and v whose values ranges between (0, 1) and β is any variable whose value is 1.5. Now the Hawk positions for the next iteration can be mathematically defined as follows.
The iteration finally provides either Q or R as a new and better position to reach the prey as in Fig. 3.
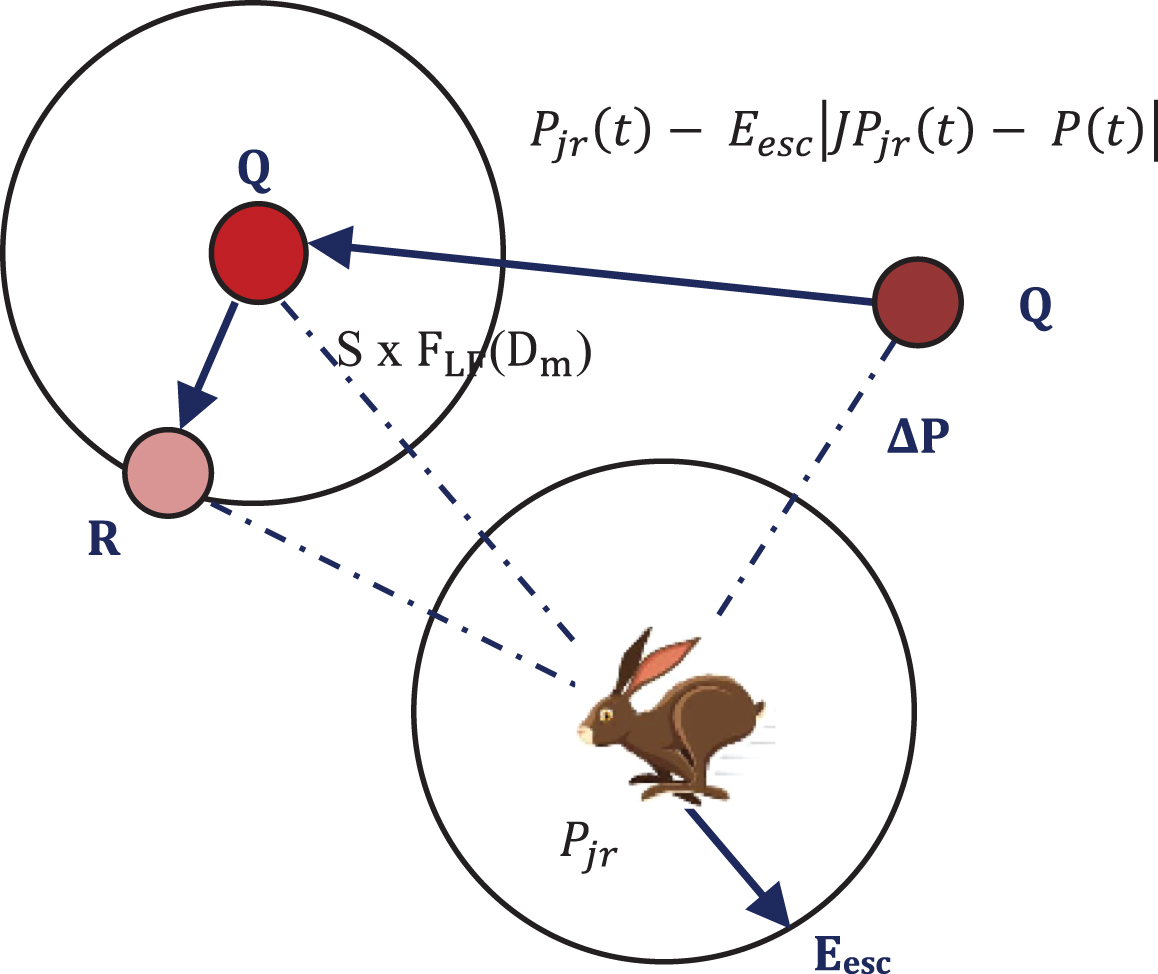
Example for Soft surround with progressive rapid dives.
3.3.3.4. Hard surround with progressive rapid dives. The event occurs when r < 0.5 and E < 0.5 where the prey has no energy but it can get itself escaped from the Harris’s hawk. The Hawks shall now get closer to the jackrabbit as a cluster to apply a hard surround and perform surprise-pounce as depicted in Fig. 4 which projects that either Q or R will be the next position of the hawk.
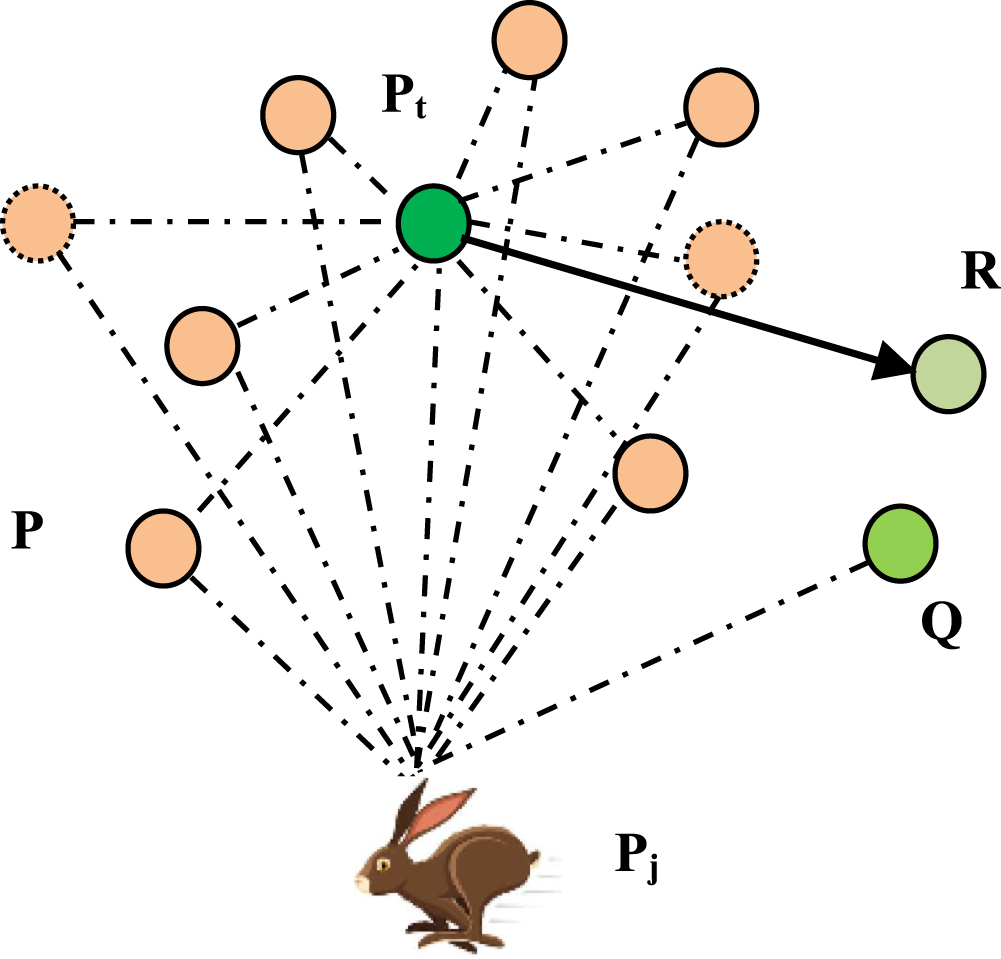
Example for Hard surround with progressive rapid dives.
Hard surround carried out at this stage can be modelled as follows.
The traditional Harris’s Hawk Optimization algorithm shall find the best Hawk position based on the current position of the Hawk, Position of the jackrabbit, Escaping energy of the prey, the Levy Fight of the Hawk. This may result in short distance flights and rarely long distance jumps. Thus the complexity becomes high as the iterations may grow. The problem can be solved by performing an effective technique, Differential Evolution (DE) on HHO Algorithm to provide the best position of Hawks. Using DE, the convergence speed can be effectively done by alternating few parameters.
The efficacy of DE lies in implementation of evolutionary technique and convergence of space. The three main operators of DE are (a) mutation, (b) crossover. A new set of trial vector is generated, which is compared with previous generation vector and new selections are made [24].
Mutation phase
The mutation phase works on the neighbourhood of each individual in the initial population of the problem, P(t) to generate the mutation vector, MVi(t). The phase generates Pbest(t) as the near optimal solution with reduced time complexity. The final mutation vector is given by the following Equation 17.
To increase population density, binomial distribution can be applied on the donor vector generated after mutation. Trial vector after performing crossover on donor vector is given by Equation 21.
Based on the crossover trial vector, the better solution among CVi(t) and Pi(t) is chosen using greedy technique.
The solution selected will be the position of the hawk in the next iteration.
The system model and assumptions are described below before elucidating the proposed mechanism of clustering and routing.
System model assumptions
The energy model of the system is given to be
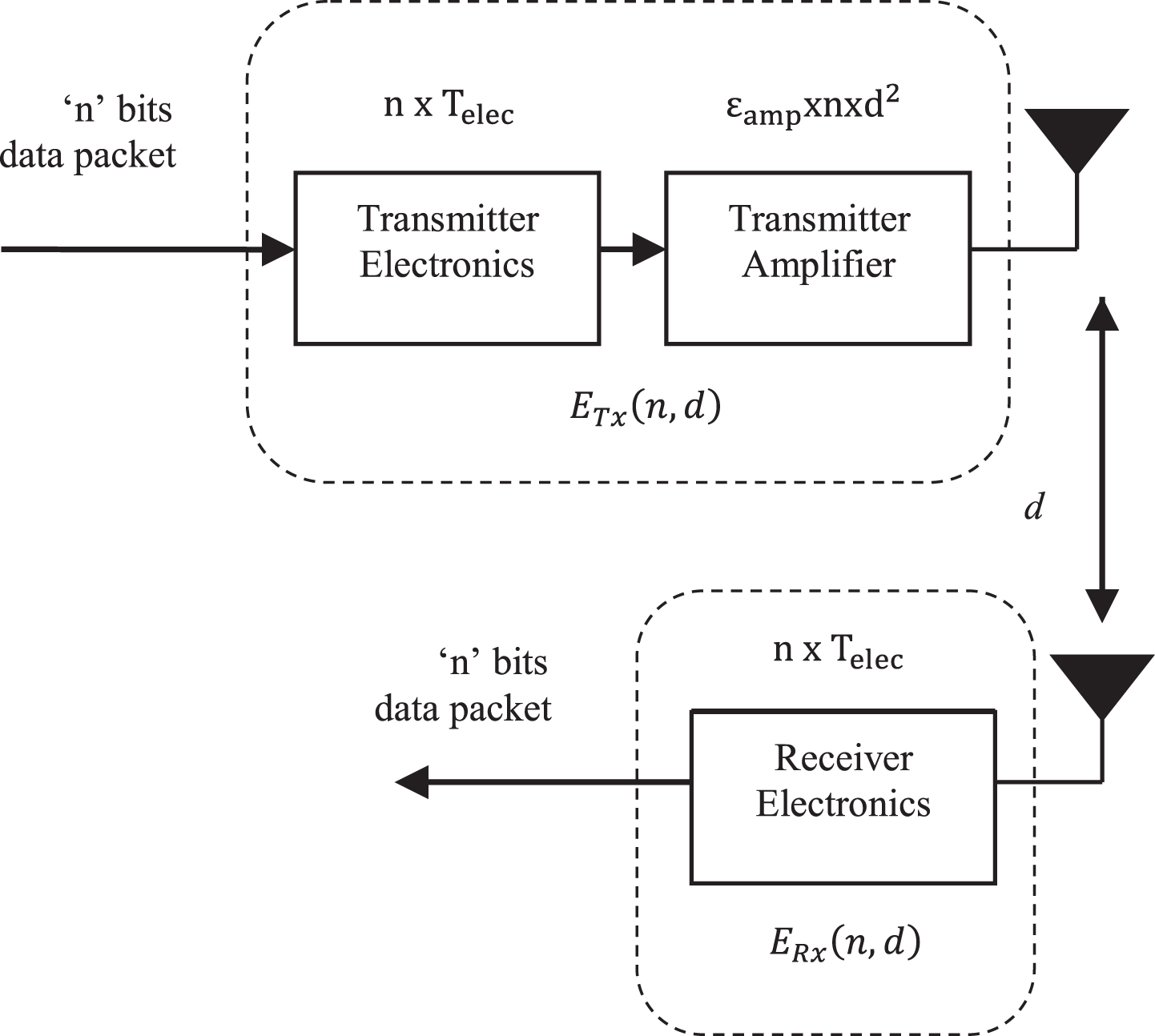
Energy model.
The assumptions of the proposed work are as follows. The sensor nodes deployed over a 100 m x 100 m geographical square area. The nodes are randomly dispersed. The sensor nodes are aware of their own locations and not about other nodes. Each sensor has unique identification number. Initial energy of sensors is defined, IEi. The initial energy of sensors differs with each other. The energy of the sensor node is limited and the battery cannot be charged. Up on the exhaust of available energy, the node remains dead and useless. The Base Station remains static and is located inside or outside the sensing field. The power is externally supplied for the BS. BS knows the location of every sensor node. Every cluster needs cluster head and member nodes. Multi-hop communication is enabled to transfer data packets efficiently. Based upon signal strength, the channel capacity varies from node to node. Slot based scheduling is facilitated by the cluster heads.
The square-shaped sensing region consisting of numerous sensor nodes are connected wirelessly with the Base Station or sink node. The sink is unaware of the node parameter values and a proactive approach of identifying the energy and distance of the sensor nodes to the Base Station.
The Base station initiates the Improved Harris’s Hawk Optimization (IHHO) algorithm to identify the cluster heads. The IHHO works on energy and distance of individual nodes and finds an optimal-set or near-optimal-set of energy efficient nodes as candidates of CH election. The obtained CHs from IHHO are offered as inputs for the Fuzzy method to find the best cluster heads with the aid of fuzzy rules.
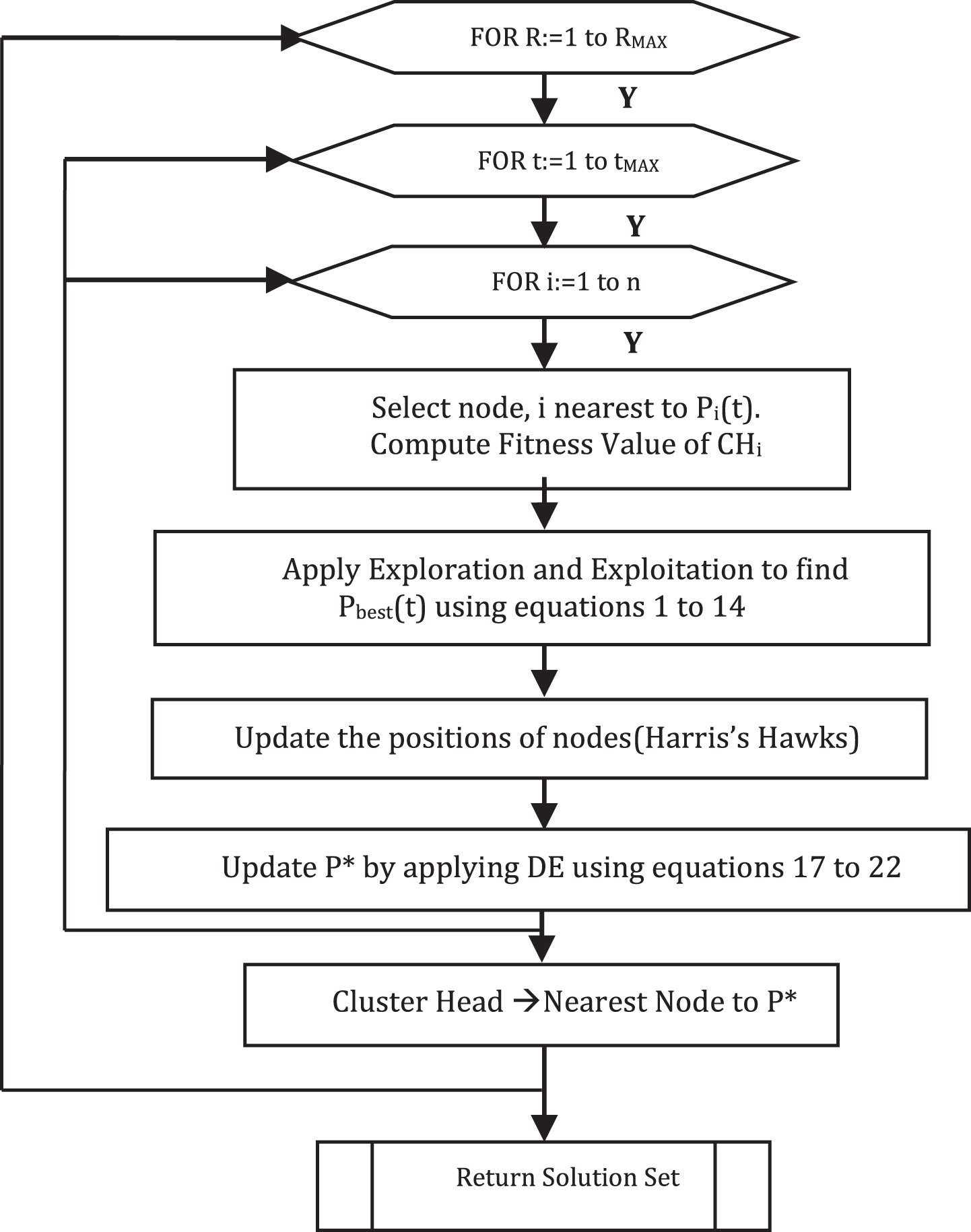
Selection of cluster head using IHHO algorithm.
The IHHO algorithm considers all the ‘n’ nodes as cluster heads (Harris’s Hawks) based on their locations, Pi(t)=(xi(t), yi(t)) represented in a 2 x 2 sensing field. Identifies the nodes neared to Hawk position and computes the fitness function for those selected nodes.
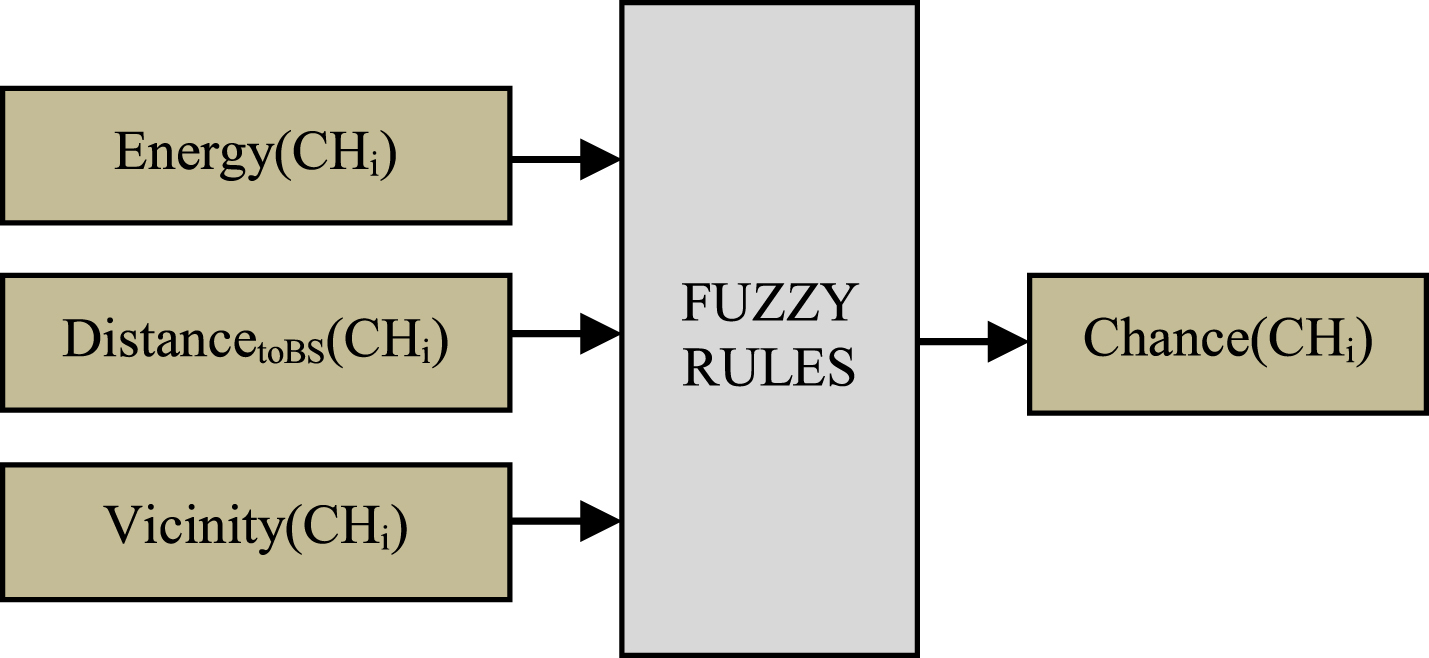
Fuzzy parameters for cluster head selection.
It implements exploration phase and exploitation phase to find the best solution set consisting of optimal cluster head, Pbest(t). The strategy applies Differential Evolution to converge the solution set to generate P*. Now the nodes nearer to P* at each round represents the Solution Set containing the CHs.
Furthermore, the optimum Cluster Head set is selected by applying Fuzzy logic [25]. The Fuzzification process works up on three important parameters of the selected CHs out of IHHO implementation. The parameters include current energy value of the CH node, distance from cluster head to sink, number of nodes in the vicinity of the CH of radius r.
The above mentioned pseudocode generates fuzzy cluster heads CH(1...k) and a super cluster head that is strong enough in terms of energy, distance and vicinity factors. If a node Fuzzy System provides a Chance Status as Better with Higher Residual Energy, Nearer to Base Station and Larger density of neighbouring nodes, then it is considered to be the super cluster head, SCH.
The role of a SCH is to coordinate the data transmission phase and performs rotation of CHs when their energy goes lesser. The nodes with chance status as fair or good shall be considered as Cluster heads.
The input values of the system are named as crisp inputs which are supposed to be translated to fuzzy values. The fuzzy system calculates the chance status based on the Table 1 data. The fuzzy rule base is built with the aid of IF...THEN rule set [26]. The proposed rules are in Table 2. The system generates the output based on the table data.
Input function of fuzzy system
IF...THEN rules for selecting a node as Cluster Head
Now the Cluster Heads are announced to all the nodes. Clusters are formed based on the distance of the node to CH, distance of the node to base station and energy factors. A FuzzyClusterFormation shall create cluster based on the cluster heads generated out of FuzzyCHSelection.
Every cluster head either accepts or rejects the request based on the chance status generated by the fuzzy system. The system generates status of a node based on which, it can be decided whether to accept or reject the node becoming a member of the cluster. When the chance value is better or fair, the node is likely to become the member of the corresponding cluster head. If a node has the chance as good and is far away to other CHs, it shall be accepted as member under current CH. Else it will be selected by some other cluster head nearer to it. The rule set for formation of cluster is given in Table 3.
IF...THEN rules for selecting a node as Member Node of the Cluster
After obtaining all the data from the member nodes, it sends the data to Super Cluster Head directly when the hop-count is 1 or through intermediate cluster heads when the hop-count is greater than 1. The Super Cluster Head shall collect the data from respective cluster head using time division approach and forwards it to Base station.
During data transmission, the CHs may lose energy and prolong usage of the same node as cluster head may lead to failure of node. To keep the network alive, the CHs are rotated among other members of the cluster. This is performed by the super cluster head. It evaluates the remaining energy of every node and computes a threshold value as Ethreshold = Ehigher –Elower / 2. When the energy of any CH goes below the threshold energy value, then the SCH performs CH rotation. Another node having higher energy and reduced distance shall be nominated and considered to the CH.
Computational complexity
To analyze the computational complexity of the proposed IHHO-F algorithm, the worst-case complexity of the algorithm is considered. The complexity of IHHO-F to initialize N population / nodes is given as O (N). The computational complexity behind the calculation of fitness of each search agent is O(MxN), where M is the number of iterations. The complexity behind the position update of the search agents is given by O (MxNxP) where P is the location update of the population. The complexity in applying fuzzy logic is O(MxNxK) where K is the number of clusters and K < P. Thus the overall complexity analysis of IHHO-F is derived to as
O(IHHO-F)=O(N)+O(MN)+O(MNP)+O(MNK) According to the property of asymptotic notations, O(IHHO-F)=O(MNP)
Performance analysis
In this work an evolutionary algorithm called Improved Harris Hawk Optimization (IHHO) is proposed, which is used in optimum CH selection using various parameters such as energy of sensor nodes, number of hops, channel capacity and signal strength etc. Fuzzy logic is employed in deciding the CH by taking energy, distance between sensor nodes and BS and vicinity as input parameters. This work is simulated using NS2 and is compared with LEACH and LEACH-FC protocol. The network parameters are given in Table 4.
Simulation parameters
Simulation parameters
i. Residual energy: Every sensor node has some initial energy. As the clustering process is started and data transmissions are done, some amount of energy are dissipated. Residual energy or remaining energy is the balance energy existing after the energy spent. This parameter is the key factor in choosing a cluster head. The network consisting of nodes with higher residual energy lasts forever. When the residual energy decreases faster, the nodes are likely to die in the near future.
ii. Alive Nodes Count: The nodes having energy (in J) are said to be alive nodes. The nodes tempt to be alive as far as their energy is used with more caution. Since sensor nodes are deployed in hostile environments, recharging is difficult and cannot happen frequently. So the remaining energy in every sensor should be used carefully. When more amount of energy spent in clustering or other message transfers, the nodes shall soon face temporal deaths.
iii. Transmission rate: Every WSN is meant for data communication. The number of bits transferred in unit time is referred as transmission rate.
iv. Network span: A network with more alive nodes for longer time leads to extended network lifespan. The more the residual energy leads to the more the longevity of a node; the more number of alive nodes, leads to prolonged existence of network.
Results
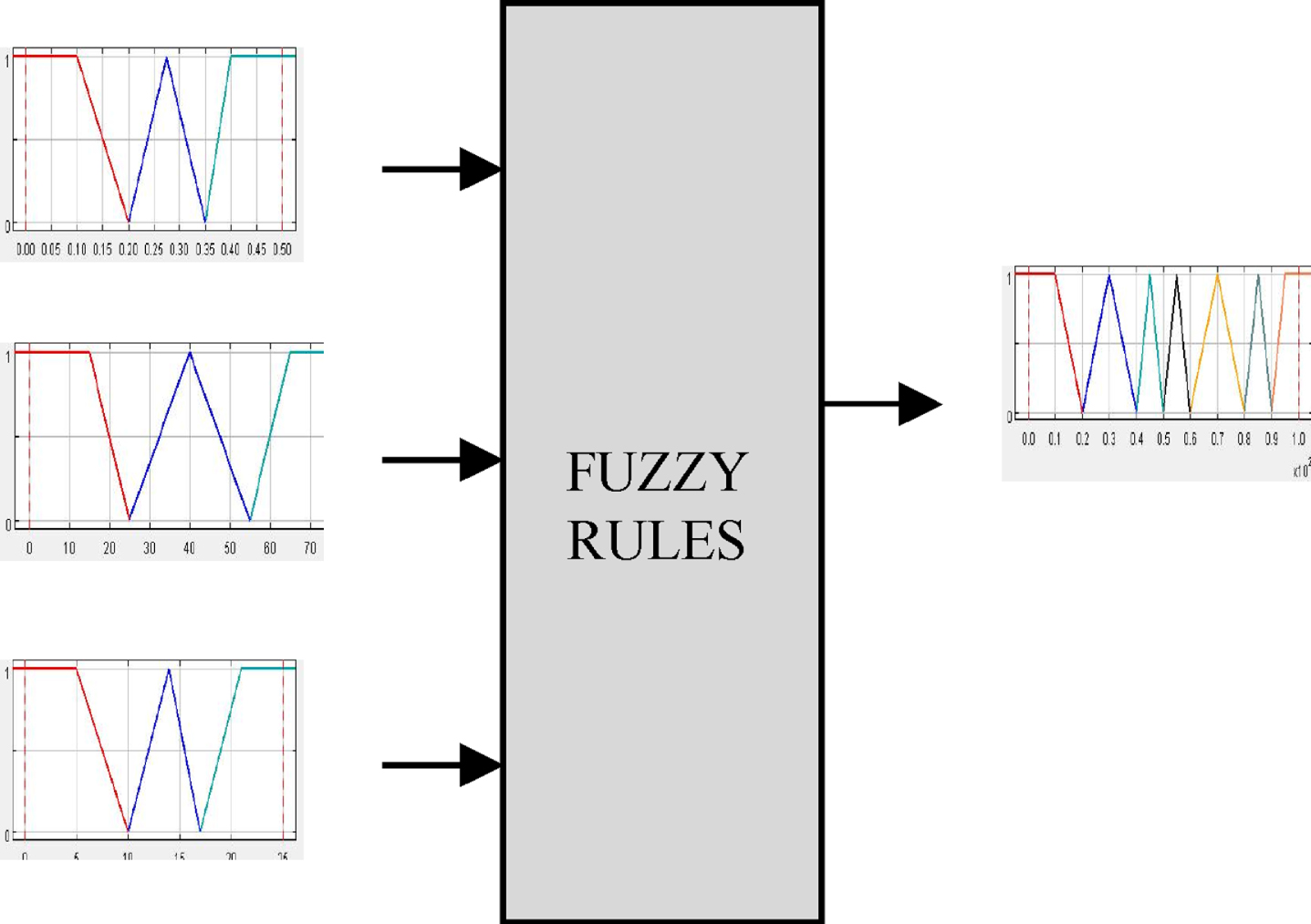
The basic model of fuzzy inference system has been displayed in Fig. 8. It comprises of three parameters such as energy, distance and vicinity (inputs) with inference rules to tackle the chance (output) as per requirement. Fuzzy logic methodology is pragmatic approach based and it provides effortlessness for the developing efficient system. For a node to become a CH, fuzzy logic is employed. The below Fig. 9 provides the degree of membership for the inputs chosen.
Modelled fuzzy system.
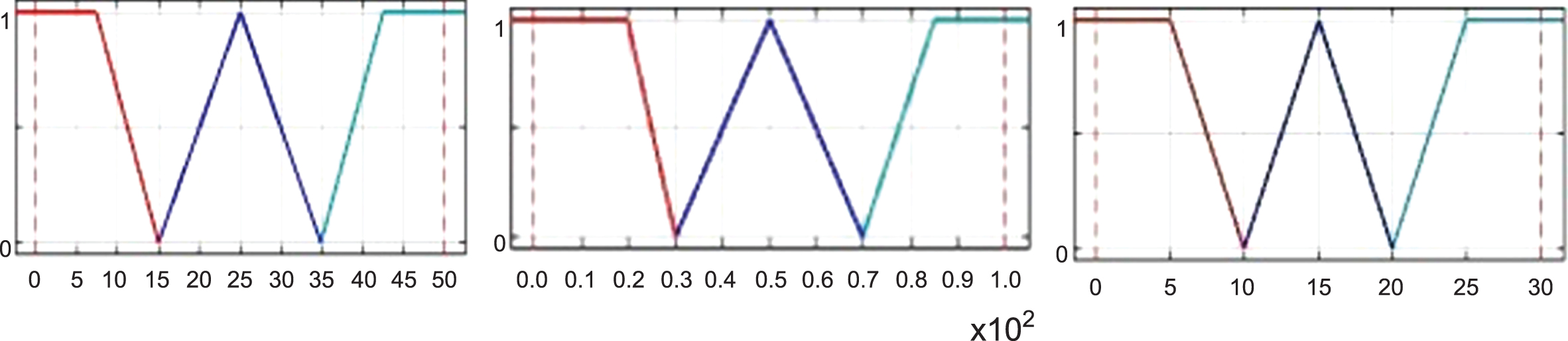
Input membership functions.
The input values of the system are named as crisp inputs which are supposed to be translated to fuzzy values. The fuzzy system calculates the chance status based on the Fig. 9.
The fuzzy rule base is built with the aid of IF...THEN rule set. The system responses are revealed in Figs. 10, 11.
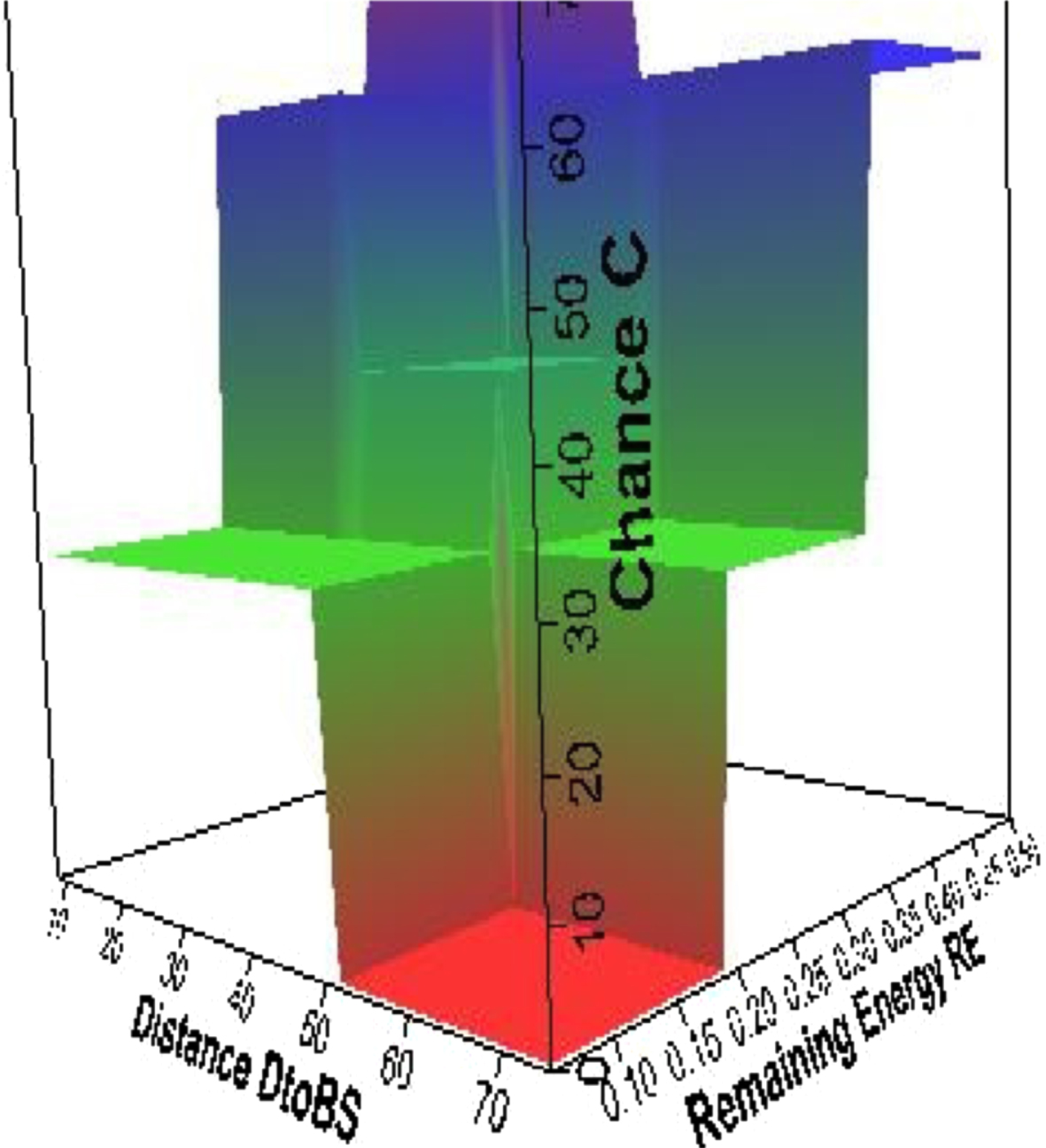
System response of energy RE, distance DtoBS and chance C.
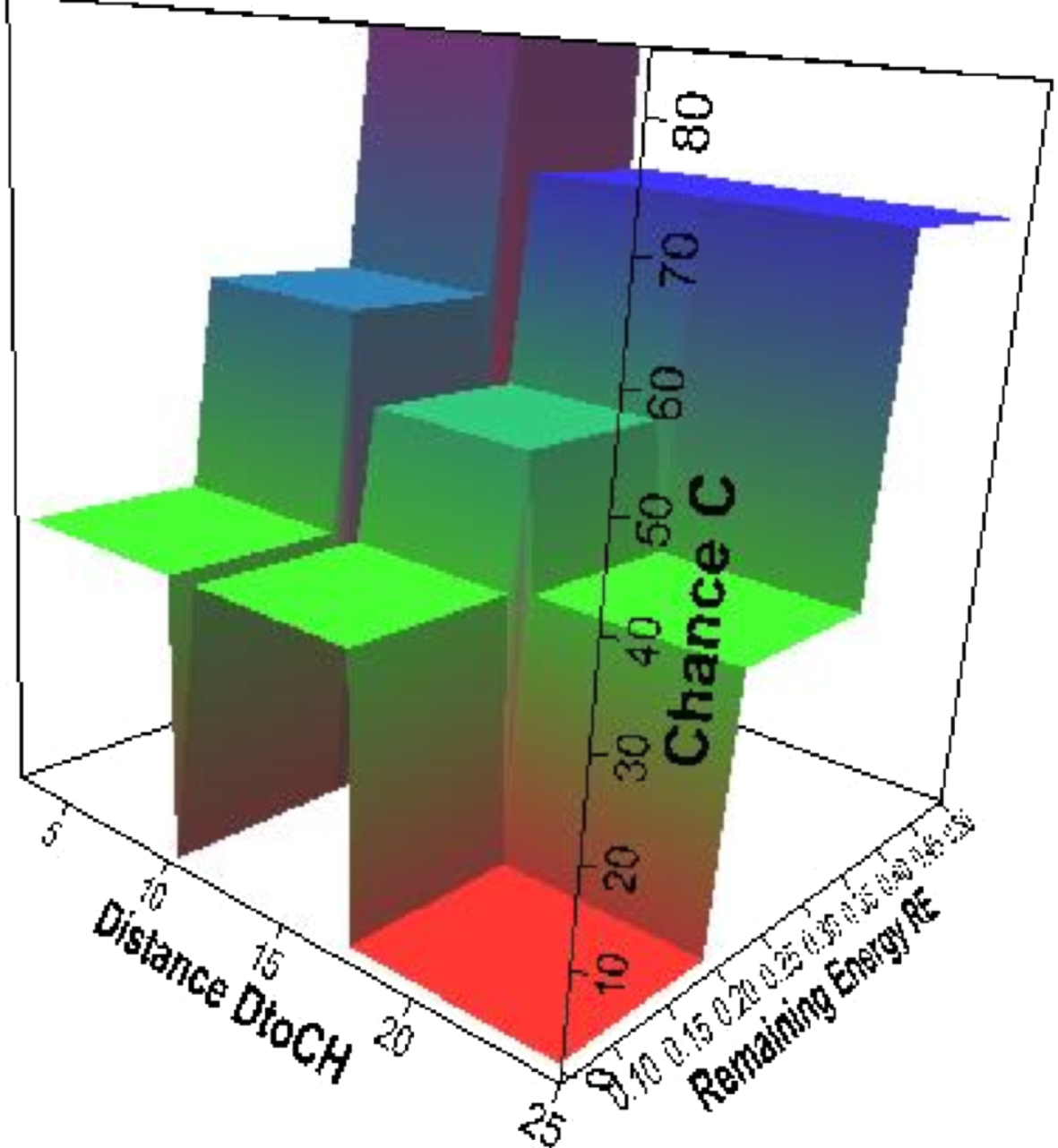
System response of energy RE, distance DtoCH and chance C.
The Improved Harris’s hawk Optimization algorithm with Fuzzy approach has been provided in the pseudocode above. The proposed work follows the step by step work flow of IHHO protocol. The nodes are deployed over the monitoring field during the setup phase. The node parameters are initialized as per the simulation parameters available in Table 4. The clustering procedure is employed to perform sensing and data transmission in efficient way.
For the present simulation work, 100 nodes are simulated to be dispersed over the sensing field of 100 m x 100 m. The base station is positioned at using random waypoint mobility model. The protocol is simulated to analyze the number of stability of nodes after each round of cluster formation, residual energy of each node, average end-to-end delay, and the network life throughput of the network.
To analyze the efficiency of the proposed work, the IHHO-F simulation results are compared against EO, GWO and HHO. Figure 12 represents the comparison of alive nodes to iterations. It is analyzed that the stability of nodes starts decreasing at some point of iteration, but still IHHO-F is found to be more stable than existing protocols. This stability factor has increased due to the fitness function evaluated on every node in the population.
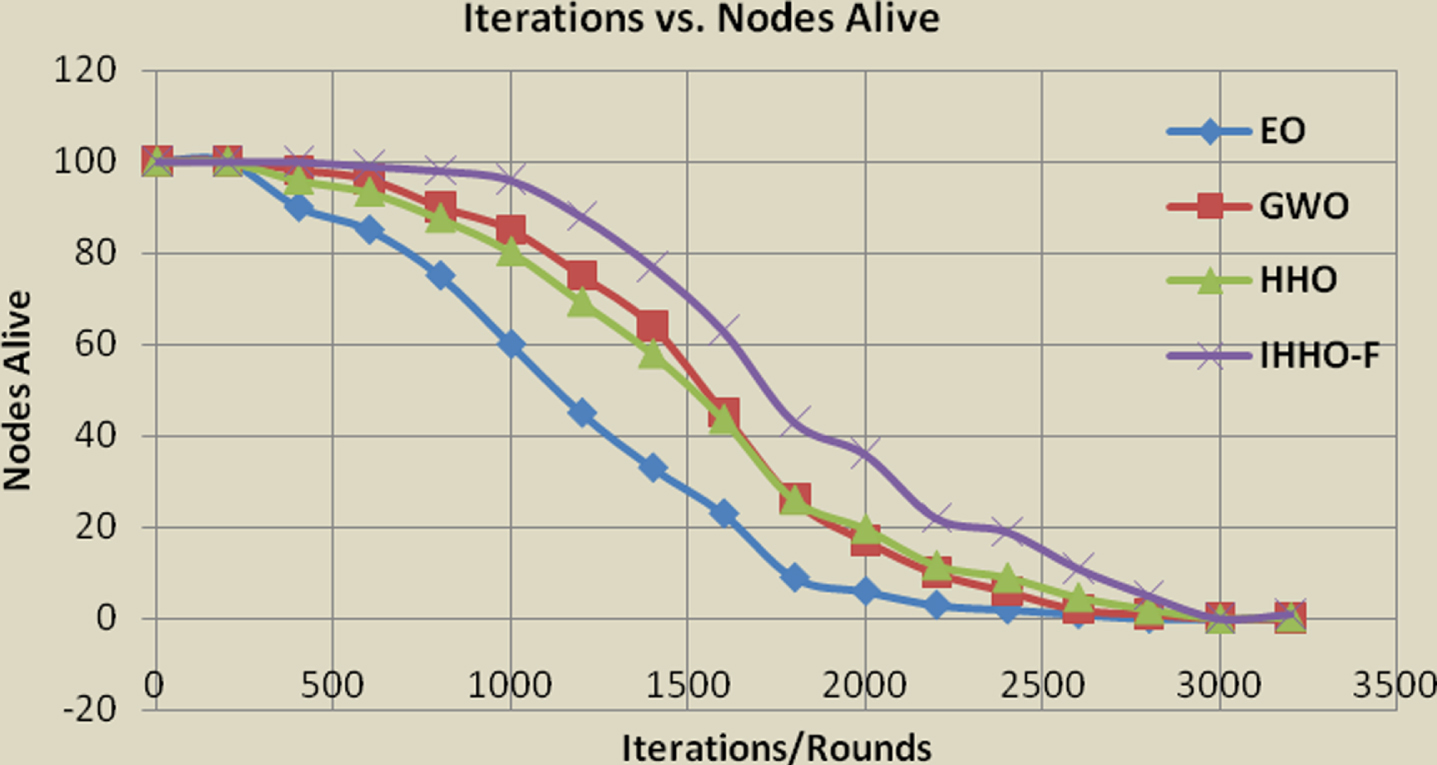
Stability period of nodes.
Residual energy of every node is computed every iteration. Based on the remaining energy, the node is accounted for being nominated in CH election. When the number of nodes with residual energy above the threshold is more, there is more flexibility in considering other parameters such as distance and vicinity in deciding the cluster head. Figure 13 represents the percentage of energy remaining at the end of iterations in the sensor nodes. The number of nodes alive is initially 100. As the iterations grow, due to loss of energy, nodes die and the alive node count is reduced gradually. The significance of IHHO-F lies in the reduction of computational overhead that leads to the reduced energy consumption.
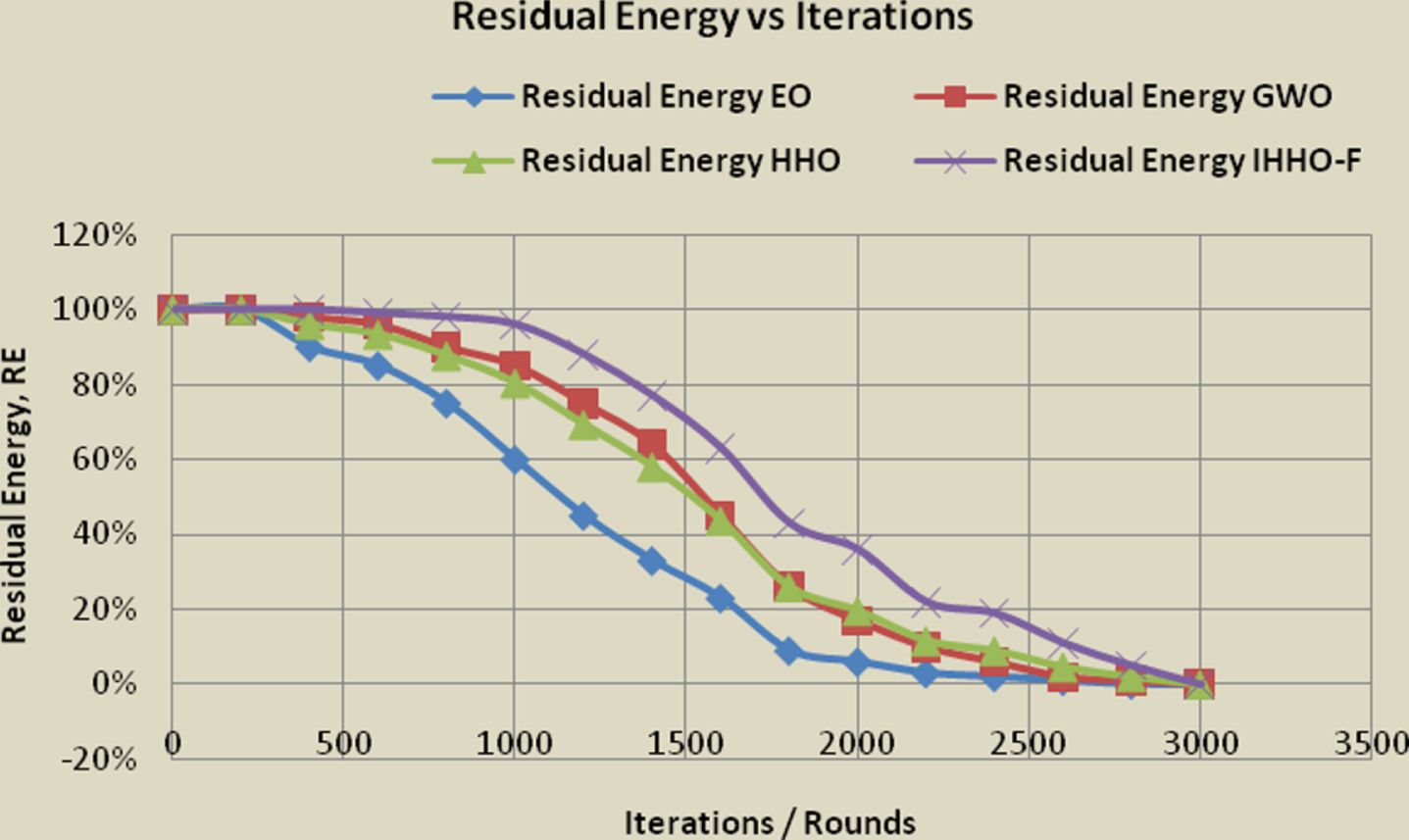
Residual energy vs. iterations.
Besides effective utilization of energy, network throughput also depends on the reduced end-to-end delay of packets and reduced loss of packets too. Figures 14 15 illustrates the average end-to-end delay and the packet loss during data transmission.
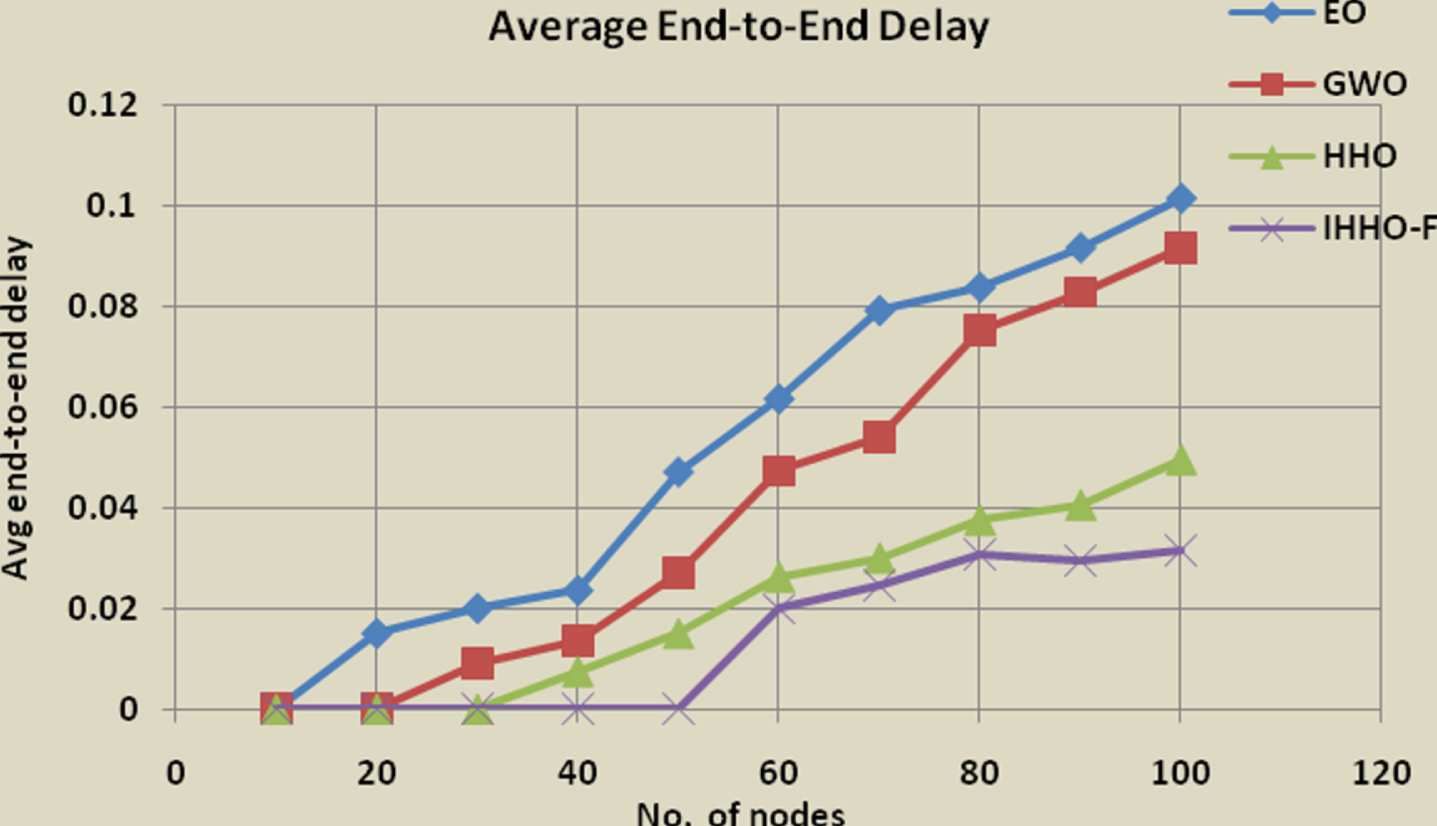
Average end-to-end delay in the network.
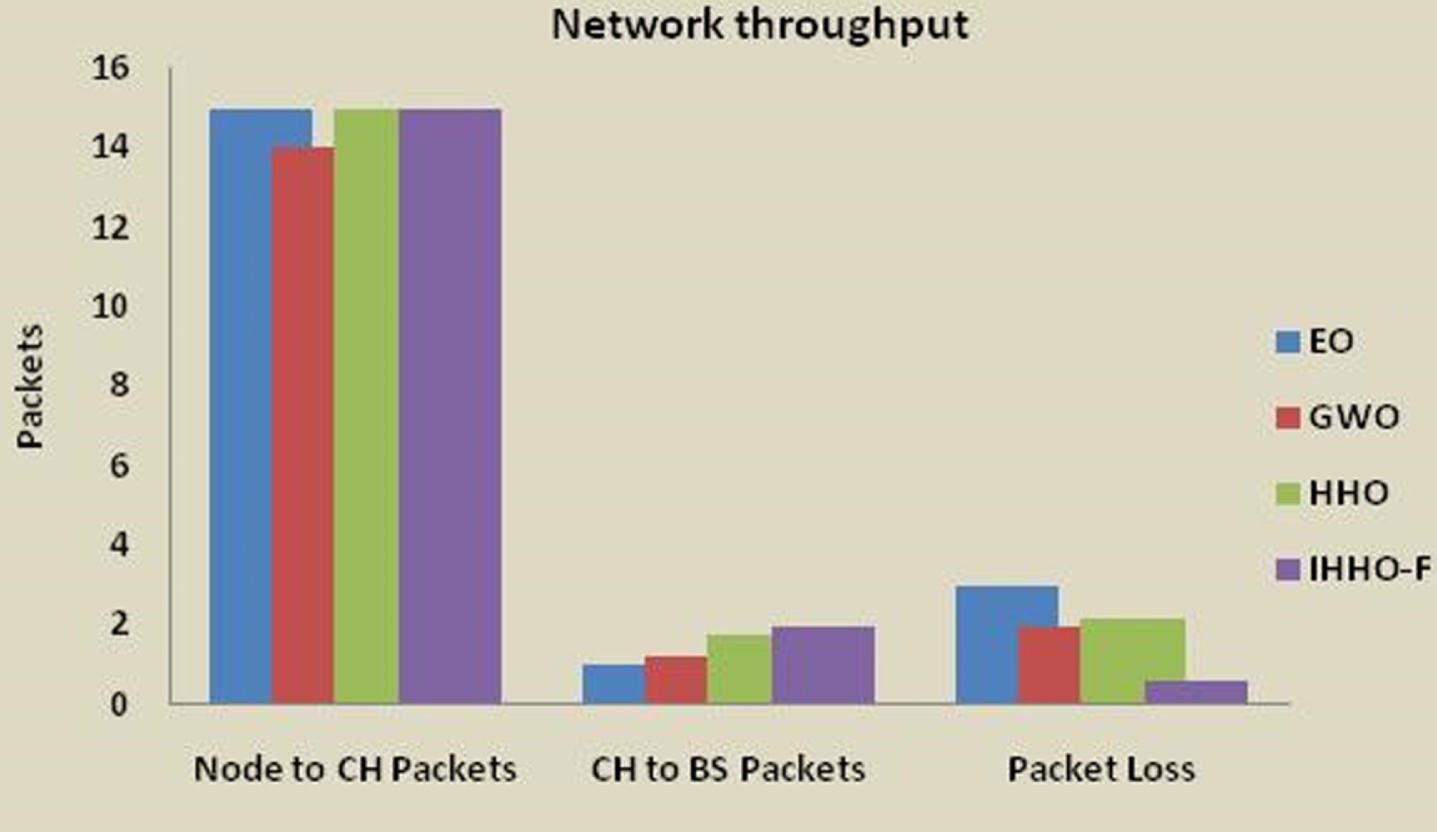
Packet loss.
Network efficiency indicates the lifespan of the network or the time at which the first node or the last node gets drained off. Figure 16 demonstrates that the proposed work provides network longevity through energy efficient clustering method.
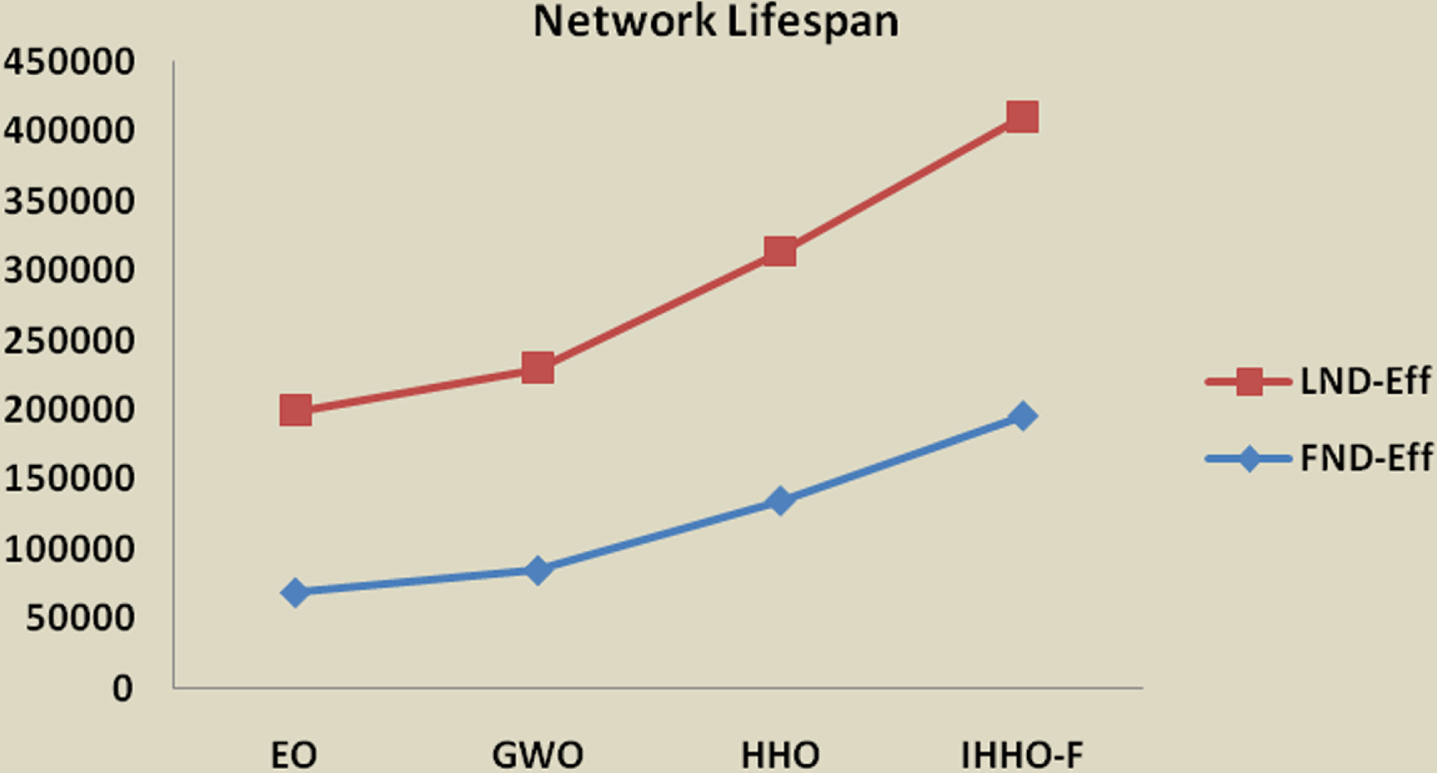
Network lifespan.
The proposed work out performs in extending the network lifetime when compared with existing protocols.
This paper provides a Fuzzy based Improved Harris‘s Hawk Optimization algorithm to perform clustering in an energy efficient manner. Several protocols have been proposed previously to perk up network lifetime. Still, the issue has never reached its optimum. We have contributed the efficacy of improving network lifetime by selecting cluster head based on higher energy level, smaller distance to base station and better vicinity of nodes. The proposed work was simulated and various parameters such as alive node count, residual energy of node, packet loss, end-to-end delay, and network lifespan were analyzed. Various network parameters of IHHO-Fuzzy is assessed and compared with existing protocols such as EO, GWO, and HHO. It is inferred that there is a significant progress in the performance of the proposed work.
In future, the number of sensor nodes shall be increased over a large state space and the performance shall be analyzed based on scalability factor. The work can be further extended by applying IHHO-F to solve multi-objective optimization, other NP-Hard and constraint based problems. Furthermore, the existing work shall be implemented to various applications such as surveillance systems, home care systems and medical supply chain networks. The security of the existing protocol shall be inculcated by implementing a mathematical model for IHHO-F security.