
Abstract
In recent years, interval type-2 fuzzy logic systems (IT2 FLSs) have become a hot topic for the capability of coping with uncertainties. Compared with the centroid type-reduction (TR), investigating the center-of-sets (COS) TR of IT2 FLSs is more favorable for applying IT2 FLSs. Actually, it is still an open question for comparing Karnik-Mendel (KM) types of algorithms and other types of alternative algorithms for COS TR. This paper gives the block of fuzzy reasoning, COS TR, and defuzzification of IT2 FLSs based on Nagar-Bardini (NB), Nie-Tan (NT) and Begian-Melek-Mendel (BMM) noniterative algorithms. Six simulation experiments are used to show the performances of three types of noniterative algorithms. The proposed noniterative algorithms can obtain much higher computational efficiencies compared with the KM algorithms, which give the potential value for designing T2 FLSs.
Keywords
Introduction
As a type of most commonly used fuzzy systems, IT2 FLSs have been successfully applied to many uncertain fields like intelligent controllers [1–3], permanent magnetic drive [4, 5], forecasting [6–8], financial systems [10, 11], fault detection [12, 13], medical systems [14], aviation [15], and decision making [58–60] and so on. Recent theory and applications studies also prove that T2 FLSs have advantages in coping with uncertainties compared with T1 FLSs. As per these, IT2 FLSs have become an emerging technology. It is waited in hope that IT2 FLSs [16, 17] will be used in more and more scientific and applications areas.
Generally speaking, an IT2 FLS is composed of fuzzification, rule base, inference, type-reduction, and defuzzification, as illustrated in Fig. 1. The block of type-reduction supervised by inference plays an important part, which mainly transform type-2 fuzzy set (T2 FS) into type-1 fuzzy set (T1 FS). Operations between IT2 FLSs are more complex than T1 FLSs owing to the type-reduction. T1 FLSs only use T1 FSs, but there exists no less than an IT2 FS in antecedent or consequent of IT2 FLSs.

An IT2 FLS [17].
Mendel developed the prevalent Karnik-Mendel [18, 19] (KM) types of algorithms, which was adopted to calculate the centroid of IT2 FS or complete the type-reduction of IT2 FLSs. Even so, the computational intensive KM types of algorithms may not be adapted for real applications as they are iterative. Another type of algorithms that bypass the type-reduction (TR) can attain the crisp output of IT2 FLSs without iterations, they are called as Greenfield-Chiclana Collapsing Defuzzifier (GCCD [20]), Wu-Mendel Uncertainty Bound (UB[21]), Nagar-Bardini (NB) algorithms [22, 23], Nie-Tan (NT) algorithms [24, 25], Begian-Melek-Mendel (BMM) algorithms [26, 27] and others. IT2 FLSs on the basis of NB algorithms have been proved to have excellent show over large-scale structured uncertainties. Furthermore, recent studies show that sampling-based discrete NT algorithms [28] can almost complete the accurate centroid TR for IT2 FLSs. In addition, compared with T1 FLSs, IT2 FLSs based on BMM algorithms have superior stability and robustness. All these works have laid profound theoretical foundations for investigating the prevalent COS TR for IT2 FLSs. This paper discusses the fuzzy reasoning process and extends three types of noniteritve algorithms to calculate the output of Mamdani type IT2 FLSs. Computer simulation experiments are designed to show the performances of three types of noniteritve algorithms compared with the popular KM algorithms, and it is proved that the calculation efficiencies of former are much higher of the latter.
We arrange the rest of this paper as follows. Section 2 gives the background of Mamdani type IT2 FLSs. Section 3 proposes how to use three types of noniterative algorithms to complete the COS TR of IT2 FLSs. Section 4 provides six simulation examples to show the performances of three types of noniterative algorithms in contrast to the KM algorithms. Finally the conclusion and expectation is given in Section 5.
IT2 FSs
in which ∬denotes all the admissible primary variable x and primary membership grade u.
where fx′ (u) ≡1.
and
The secondary membership grades of an IT2 FS are all equal to one, so an IT2 FS can be characterized by its FOU, and consequently, by its UMF, and LMF. An example of an IT2 FS is shown in Fig. 2.

Consider from the popular aspect of inference structure [31], an IT2 FLS can usually be divided into two categories: Mamdani type [7, 32] and Takagi Sugeno Kang (TSK) type [33, 34]. Without loss of generality, see a Mamdani IT2 FLSs with multiple inputs x1 ∈ X1, x2 ∈ X2, ⋯ , x p ∈ X p and single output y ∈ Y, which can be described by M fuzzy rules, in which the nth rule is of the form:
From T1 FSs to IT2 FSs, the structure of rules of FLSs does not change, i.e., the only difference is that the manner in which the antecedent and consequent are modeled. To simplify the expressions, we use the singleton fuzzification in the paper. For each fuzzy rule, as x = x′, we calculate the firing interval F
n
(x′), i.e.,
Let the centroids
The COS type-reduced set Y COS (x′) is an IFS [35], i.e.,
After the COS TR, the weighted average is used, i.e.,
Nagar-Bardini algorithms
On the basis of noniterative Nagar-Bardini (NB) algorithms, IT2 FLSs are proved to have excellent shows over large-scale of structured uncertainties. For Mamdani type IT2 FLSs, the center-of-set (COS) type-reduced set is an interval. Suppose that YMamdani,IT2 (x) = [y
l
, y
r
], in which the two end points can be computed as:
where
Then the crisp output is as:
Interestingly, we find that the defuzzified output computed by the NB algorithms is a linear combination of two T1 FLSs: one relies on the LMF, while the other one depends on the UMF.
Recently, the closed form continuous Nie-Tan (CNT) algorithms [24, 36] are proved to be an accurate exhaustive approach for completing the centroid TR of IT2 FLSs. Then it is proved that the sampling-based dicrete NT algorithms [28, 37] can almost accurately approximate the CNT algorithms as changing the number sampling of primary variable. Here we adopt the NT algorithms to study the more applicable COS TR of IT2 FLSs, then the defuzzified value of IT2 FLSs can be got directly as:
Actually, the discrete NT algorithms compute the output by averaging the lower firing interval and upper firing interval, which perform the TR and defuzzification simultaneously.
On the basis of closed form of Begian-Melel-Mendel (BMM) algorithms, IT2 FLSs have better stability and robustness compared with T1 FLSs. Here we adopt the BMM algorithms to study the COS TR of IT2 FLSs, which can compute the defuzzified value of IT2 FLSs straightly, i.e.,
In fact, there exist some close relations between these three types of noniteraitve algorithms. Observing the Equations (12), (14) and (15), it is interestingly to find that the BMM algorithms turn out to be more generalized form of NB algorithm and NT algorithm. Next we provide the specific explanations. When
The above analysis provides the relations between three types of discrete noniterative algorithms, and the conclusion can be that NB algorithms and NT algorithms are two special conditions of BMM algorithms.
Simulation setup
This section provides six computer simulation examples to illustrate how to adopt the noniterative algorithms to complete the COS TR of Mamdani type IT2 FLSs. For the first two examples, suppose that four antecedents and one consequent be adopted in each fuzzy rule, so that, there are 16 fuzzy rules. Let the nth fuzzy rule be:
in which

Shape of FOU of Gaussian primary MF with uncertain standard deviation.
in which
Here the antecedent IT2 FS is chosen as the Gaussian primary MF with the certain mean and uncertain standard deviations, whose parameters are as:
The parameters of input measurement of IT2 FLSs is chosen as:
Let c1 = rand (1, 4), and c2 = rand (1, 4), then
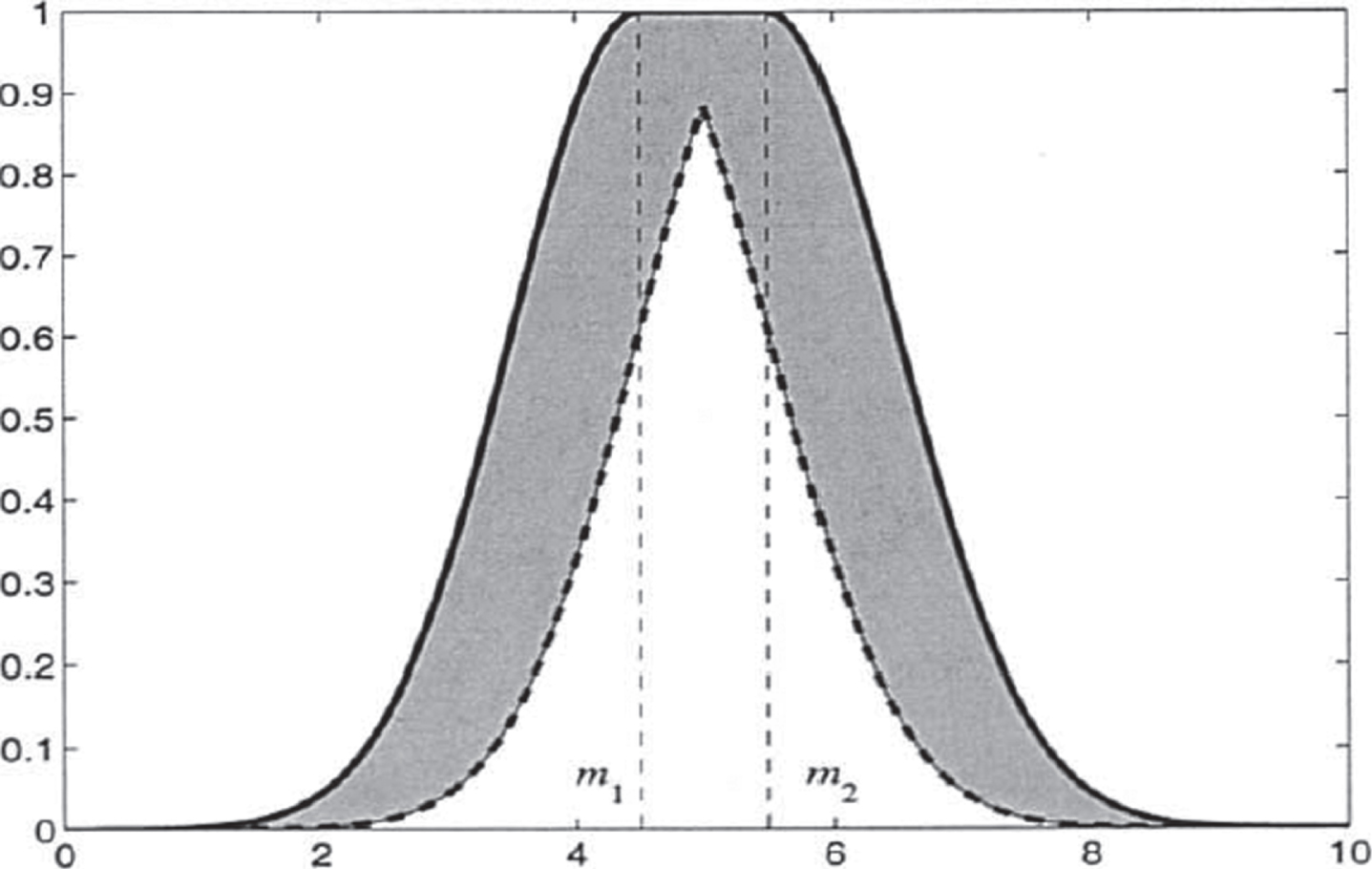
FOU of Gaussian primary MF with uncertain mean.
Here the antecedent IT2 FS is chosen as the Gaussian primary MF with the fixed standard deviation, and uncertain mean, whose parameters are as:
The parameters of input measurement x and two centroid endpoints of
For Example 3 and Example 4, the parameters of Mamdani type IT2 FLSs are selected as the forms in Example 1 and Example 2, respectively. However, the number of antecedents in each fuzzy rule is chosen as 5. Therefore, there exists 32 fuzzy rules. For Example 5 and Example 6, the parameters of Mamdani type IT2 FLSs are selected as forms in Example 1 and Example 2, respectively. While the number of antecedents in each fuzzy rule is chosen as 6, so that, the total number of fuzzy rules is 64. For the BMM algorithms, α is chosen as the average of 1000 random numbers distributed on the interval [0, 1], in addition, β = 1 - α.
For the above six examples, the defuzzified outputs computed by the KM algorithms and three types of noniterative algorithms are provided as in Table 1.
Defuzzified output
Defuzzified output
Here the simulation platform is a dual-core CPU dell desktop, which is with E5300@2.60 GHz and 2.00 GB memory, and running Windows XP. All programs are executed on Matlab 2013a. In order to compare the computational efficiencies between KM algorithms and three types of discrete noniterative algorithms, the computational times comparisons for KM and three types discrete noniterative algorithms for obtaining the defuzzified output are shown in Table 2, where the last three lines denote the time reducing rate reducing rate (TRR) for three types of discrete noniterative algorithms in contrast to KM algorithms, respectively. The TRR is defined as:
Computation times comparisons for KM and three types of noniterative algorithms
here t0 represents the computation time of KM algorithms, and t1,2,3 represents the computation time of NB algorithms, NT algorithms and BMM algorithms, respectively. Furthermore, the last line in Table 2 denotes the average of six examples. In addition, the time unit of value in Table 2 is the second (s).
After observing the Tables 1 and 2 (for these above six examples), let make the quantitative and qualitative analysis about the performances: 1) the defuzzified outputs calculated by KM and three types of discrete noniterative algorithms are different, however, there are not to much difference between them; 2) in contrast to the KM algorithms, three types of discrete noniterative algorithms obtain the largest TRR as 93.90%, 94.48%, and 93.61%, respectively; 3) three types of discrete noniterative algorithms can obtain the largest TRR as 34.15%, 35.37%, and 25.61%, respectively; 4) the averages TRRs for three types of discrete noniterative algorithms can reach to 81.68%, 82.61%, and 80.12%, respectively.
These six simulation experiments for completing the COS TR of IT2 FLSs illustrate that discrete noniterative algorithms can be effective approaches in contrast to the KM algorithms. Obviously, the computation times of three types of noniterative algorithms are much less than the KM algorithms, i.e., the computational efficiencies of noniterative algorithms are much higher than the KM algorithms.
This paper gives a type of Mamdani IT2 FLSs based on three types of noniterative algorithms. The blocks of inference, type-reduction and defuzzification of T2 FLSs are also discussed. Six simulations are provided to show both the defuzzified values and computation times of KM and three types of noniterative algorithms. It is shown that, the computation times of three types of discrete noniterative algorithms are much less than the KM algorithms, which provide the potential application values for designing and applying IT2 FLSs.
Next, the initialization, searching space partition, and the stop condition of different types of iterative algorithms are going to be studies. We also focus the COS TR [38–40] of IT2 and general T2 FLSs. Based on the intelligent algorithms, future works will also be concentrated on optimizing and applying T2 FLSs [54–57] for fuzzy control [41–45], fuzzy identification [46, 47] and foreacasting [6–8, 48–53] and so on.
Footnotes
Acknowledgments
The paper is supported by the National Natural Science Foundation of China (No. 61973146, and No. 61773188), the Liaoning Province Natural Science Foundation (No. 20180550056), and the Talent Fund Project of Liaoning University of Technology (No. xr2020002). The author is grateful to doctor Jerry Mendel, who has given some precious suggestions.