
Abstract
Solving the shortest path problem is very difficult in situations such as emergency rescue after a typhoon: road-damage caused by a typhoon causes the weight of the rescue path to be uncertain and impossible to represent using single, precise numbers. In such uncertain environments, neutrosophic numbers can express the edge distance more effectively: membership in a neutrosophic set has different degrees of truth, indeterminacy, and falsity. This paper proposes a shortest path solution method for interval-valued neutrosophic graphs using the particle swarm optimization algorithm. Furthermore, by comparing the proposed algorithm with the Dijkstra, Bellman, and ant colony algorithms, potential shortcomings and advantages of the proposed method are deeply explored, and its effectiveness is verified. Sensitivity analysis performed using a 2020 typhoon as a case study is presented, as well as an investigation on the efficiency of the algorithm under different parameter settings to determine the most reasonable settings. Particle swarm optimization is a promising method for dealing with neutrosophic graphs and thus with uncertain real-world situations.
Keywords
Introduction
The shortest path problem (SPP) is a fundamental combinatorial problem that appears in various scientific and engineering fields. The purpose of the SPP is to find the shortest path, i.e., the smallest weighted distance between the start and end points in a graph [1, 2]. In applications, the lengths and weights of the edges represent features such as time and cost. In the classic SPP, the distances between the nodes in the network are usually regarded as deterministic and represented by precise numbers. However, in most practical problems, the length and weight of an edge cannot be assigned exact values. An example is the network of routes used in rescue operations after a typhoon. Residents of coastal areas of China, one of the countries most affected by typhoons in the world, often face the threat of loss of life and property owing to severe storms and heavy rains and sometimes require rescue. Washed-out bridges and roads that are flooded and blocked by trees and debris mean that the rescue path after a disaster has many uncertain variables. The length of the rescue path cannot be given a definite value because of typhoon damage. This situation is a typical example of an SPP with inexact weight on the edges of the network graph, a problem that has attracted increasing attention from scholars all over the world.
Buckley and Jowers [3] introduced the concept of fuzzy logic into such SPPs. Subsequently, Deng et al. [4] proposed a fuzzy Dijkstra algorithm for SPPs in inaccurate environments and defined addition and sorting methods for fuzzy edge weights. Further, Biswas et al. [5] introduced an algorithm for finding the shortest path in intuitionistic fuzzy environments. Hu and Sotirov [6] derived several semidefinite programming relaxations for the quadratic SPP and proposed branch-and-bound algorithms to solve the SPP. Later, Zhang et al. [7] proposed a robust shortest path model that only requires partial distribution information about travel times, including the support set, mean, variance, and correlation matrix.
A neutrosophic set (NS) is an extension of an intuitionistic fuzzy set [8], which considers uncertainty and describes practical problems in more detail. In 1998, Smarandache [9] introduced neutrosophy. The NS concept involves three degrees of independence: true membership (T), uncertain membership (I), and false membership (F). Subsequently, the NS theoretical framework was gradually enriched. Ye [10] proposed the single-valued neutrosophic hesitant fuzzy set as a further generalization of the concepts of fuzzy, intuitionistic fuzzy, single-valued neutrosophic, hesitant fuzzy, and dual hesitant fuzzy sets. Wang et al. [11] described interval-valued NSs and logic in detail. Later, Peng [12] introduced the operations of multi-valued NSs and developed a comparison method based on related research of hesitant fuzzy sets and intuitionistic fuzzy sets. Meanwhile, Ye [13] proposed a trapezoidal NS, several operational rules, and score and accuracy functions for trapezoidal neutrosophic numbers (NNs). Nancy and Garg [14] proposed an improved score function for ranking NSs and applied it to decision-making process. More recently, Smarandache [15] proposed NeutroAlgebra, a generalization of partial algebra with uncertain opposites, and Mohanta et al [16]. presented an m-polar neutrosophic graph model. Son et al. [17] established some basic arithmetic operations of single-valued NNs. Meanwhile, Tey et al. [18] proposed a multi-criteria decision making method called the neutrosophic data analytical hierarchy process for the single-valued NS, and Dat et al. [19] introduced single-valued linguistic interval complex NS (ICNS) and interval linguistic ICNS and designed their operational rules. Further, Edalatpanah et al. [20] presented a new concept in NSs called the neutrosophic structured element.
Owing to the enrichment of NS theory, it is being increasingly used by many scholars to solve problems in their respective fields. For instance, Ridvan et al. [21] developed a method of solving multiple-attribute decision-making problems using single-valued or interval neutrosophic information, and Deli et al. [22] investigated multiple attribute decision-making problems in which both the attribute values and attribute weights of the alternatives are single-valued trapezoidal NNs. Broumi et al. [23] proposed an algorithm for finding the minimum spanning tree of an undirected neutrosophic weighted connected graph in which the edge weights are represented by interval-valued bipolar NNs. Meanwhile, Peng and Dai [24] presented an interval algorithm for decision making in a neutrosophic environment, and Deli et al. [25] proposed a ranking method for a single-valued NN and applied it to decision-making problems. Garg and Nancy [26] developed a nonlinear programming model based on the technique for order preference by similarity to ideal solution in an interval-valued neutrosophic environment. Faruk and Khizar [27] introduced some novel operations on neutrosophic matrices, and Bolturk and Kahraman [28] proposed a new interval-valued neutrosophic analytic hierarchy process with a cosine similarity measure. Meanwhile, Pramanik et al. [29] extended the VIseKriterijumska Optimizacija I Kompromisno Resenje strategy for multi-attribute decision-making problems to a trapezoidal NN environment. Deli [30] proposed a new method of expanding and reducing classical neutrosophic soft sets based on linguistic modifiers and gave an example of the application of the method. Deli [31] also proposed single-valued trapezoidal neutrosophic operators and applied them to decision-making problems, and Deli and Suba [32] together applied a weighted geometric operator with single-valued NNs to decision-making problems. Basset et al. [33] proposed a decision-making technology to enable decision makers to select the most appropriate projects and to check for consistency and calculate the degree of consensus among expert opinions in a neutrosophic environment. Recently, Fu and Ye [34] developed a PC risk assessment approach in an interval-valued neutrosophic environment. Schweizer [35] proposed the uncertain factors that can be considered in the process of establishing models and presented a formula to transform models into neutrosophic representations. Edalatpanah [36] developed a direct algorithm for solving neutrosophic linear-programming problems, in which the variables and right side are represented by a triangular NNs. Further, Dey et al. [37] proposed a new genetic algorithm to solve the fuzzy minimum spanning tree problem. Son et al. [38] studied the optimal control problem using fractional and partial differential equations in a minimum quadratic objective function in the framework of a neutrosophic environment and granular computing. Thong et al. [39] developed some operators and a technique for order of preference by similarity to ideal solution method to address simultaneous changes in criteria, alternatives, and decision-makers by time based on an extension of dynamic internal-valued NSs. Further, Can et al. [40] proposed a new method of classifying harmful domain names using NSs and highlighted the importance of neutrosophication of statistical data in study to assess the symptoms related to reproductive tract infections or sexually transmitted infections among women by sampling estimation [41]. In medicine, Basset et al. [42] proposed a novel framework based on computer supported diagnosis and the Internet of Things to detect and monitor heart failure patients. Jha et al. [43] put forth a novel image segmentation concept using NSs. Long et al. [44] presented a fuzzy clustering algorithm utilizing a neutrosophic association matrix. Meanwhile, Edalatpanah et al. [45] proposed an input-oriented data envelopment analysis model with simplified NNs and present a new strategy to solve it. More recently, Yang et al. [46] introduced a model of data envelopment analysis in the context of NSs and sketched an innovative process to solve it.
In practical applications, the edge weights in the SPP also encounter uncertain situations. NS theory is increasingly used by many scholars to solve the SPP. For instance, Broumi et al. [47] solved the SPP on a single-valued neutrosophic graph. Yang et al. [48] proposed a fuzzy reliable SPP under a mixed fuzzy environment; however, Kumar et al. [49] noted that Yang et al. had used some mathematically incorrect assumptions in the mixed fuzzy domain, which are not true in fuzzy environments. Kumar et al. [50] also presented an SPP model with various arrangements of integer-valued trapezoidal and triangular NNs. Smarandache [51] used trapezoidal fuzzy NNs to determine the shortest path, and Kumar et al. [52] proposed an algorithm for solving the SPP in a trapezoidal fuzzy neutrosophic environment. Broumi et al. [53] presented an extended version of the Dijkstra algorithm to find the shortest path in a network in which the edge weights are characterized by interval-valued NNs. Later, Tan et al. [54] proposed an extended dynamic programming method for solving the SPP to obtain the shortest path and shortest path length, and Broumi et al. [55] proposed a score function for interval-valued NNs and used it to solve the SPP. Moreover, they considered the SPP with the Bellman algorithm for a network using interval-valued NNs. The dynamic programming algorithm is similar to the Bellman algorithm, starting from the ending and starting point of the path, but the time cost is higher than Dijkstra algorithm. Chakraborty [56] applied the development score and accuracy functions of a pentagonal neural network to the SPP. Recently, Yang et al. [57, 58] proposed the use of circle-breaking and the ant colony algorithm to solve the SPP of interval neutrosophic graphs and employed various scoring functions to verify the stability of the algorithm. The ant colony algorithm is robust; however, the iteration process is relatively long: for a complex neutrosophic graph, hundreds of iterations are usually required to obtain the optimal solution.
In this paper, particle swarm optimization (PSO) was used to solve the SPP of an interval-valued neutrosophic graph. PSO [59] is a random search algorithm based on group cooperation developed by simulating the foraging behavior of birds. It is a kind of uncertain algorithm that embodies the biological mechanisms of natural creatures [60]. Compared with traditional algorithms, it is more suitable for solving the SPP in the case of no human intervention after a typhoon disaster. In addition, PSO uses a mechanism through which all particles share information [61–63]. Compared with the mechanism of ants that do not share information with one another in the ant colony algorithm [58], PSO has a higher convergence efficiency.
The remainder of this paper is organized as follows. Section 2 briefly introduces some basic definitions and operation rules of NS, single-valued NNs, and interval-valued NNs. Section 3 describes the SPP in the context of emergency rescue. Section 4 presents the quantification process of an interval-valued neutrosophic graph, and Section 5 provides the detailed calculation steps of PSO. Section 6 discusses a typhoon disaster rescue example to illustrate the applicability of the proposed method and provides a comparative analysis to verity the advantages of the proposed method. Finally, Section 7 summarizes the conclusions.
Theoretical basis
This section briefly introduces some basic concepts of NSs, as well as the four arithmetic operations, scoring functions, and ranking methods of interval-valued NNs.
NS
Interval-valued NNs
if if if
Typhoons are characterized by unpredictable location and extent of damage, unpredictable scope and development, and uncertainties in the extent of damage to transportation facilities and roads. Emergency rescue after disasters requires decision makers to respond rapidly so that the rescue team and rescue materials reach the disaster site as soon as possible. An incorrect decision causing a delay can make the rescue attempt useless.
Generally, there are two objective functions in an emergency-system material-scheduling model: the rescue time and cost minimization functions. The former is often directly related to the success or failure of the rescue and was therefore chosen as the main objective function in the present work. When the rescue team has a fixed preparation time, the shortest rescue time is simply the shortest transportation time, and finding it is equivalent to finding the shortest path.
Typhoon disaster rescue thus differs from general enterprise logistics. The disaster relief team faces many uncertain factors during the journey, such as road-water accumulation after the disaster, bridge damage, and possibly landslides on mountainside roads. The size determines the level interval and uses the sophistication number in the interval to describe the path weight.
The traditional SPP is a combinatorial optimization problem that may be either single-source (involving finding the shortest path from a given point to the rest of the graph) or multiple-source (involving finding the shortest path between every pair of vertices in the graph). The current solutions to such problems are based on the classic Dijkstra and Bellman algorithms. In practical applications, an urban road network is generally represented by a geographical map. To find the best path, however, this map must be abstracted into a formal graph, with travel conditions and other factors encoded as edge weights on the arcs connecting the vertices. The SPP algorithm discussed here is primarily intended for application to directed graphs for which the weights of all arcs are interval-valued NNs.
Interval-valued neutrosophic graph in SPP
The starting point of the rescue team, destinations where victims await rescue, and various traffic points along the route can be represented abstractly as graph vertices. A disaster area composed of n locations and its network topology can be abstracted as a directed graph G (V, E), where the point set V = {v1, v2, ⋯⋯ v n } represents the n points of significance for the mission, and the edge set E ⊆ V × V represents the directed connections between these vertices. A directed edge (i, j) ∈ E represents the path from point i to point j; node i is called the parent node, and node j is called a child node. A multi-step directed path from i to j can be represented as a set of directed edges in the form (i, i2) , (i2, i3) , ⋯⋯ , (i k , j) in a directed graph. The number of paths from one node to another varies according to the strength of the connectivity of the directed graph.
To make the best decision, it is necessary to consider the length and condition of the path, the transportation capacity, and factors such as the geographic location, terrain, and degree of damage caused by the disaster. Considering the amount of uncertain information, by requantizing the edge weights into an interval NNs, the rescue graph can be requantized into an interval neutrosophic graph.
Shortest path on interval neutrosophic graph via PSO
PSO randomly obtains the number of particles (and paths) particle_num, and each particle compares all the positions it flies over, finds the path with the smallest path score function, and obtains particle_num local optimal solutions pBesti, among which the smallest local optimal solution is defined as the global optimal solution gBest. The flight speed of each particle is updated so that all particles slowly tend to gBest. In the iterative process, pBesti and gBest are optimized by continuously modifying the particle flight speed, and finally all pBesti converge to gBest. After each iteration, the particle velocity is adjusted according to the current extreme values using
Step 1: Initialize the feasible solution set Φ from the starting point to the ending point according to the side length of the neutrosophic diagram, particle_num, c1, c2, and w.
Step 2: Initialize the random position
Step 3: Calculate the fitness value
Step 4: Compare the fitness value of each particle with that at its historical best position. If the former is better than the latter rtreat the current position as the best.
Step 5: Compare the local optimal solution for each particle with the best position gBest experienced by the world. If the latter is better than the former rreset pBest to gBest.
Step 6: Use Eqs. (8) and (9) to calculate
Step 7: If the local optimal solution of each particle converges to the global optimal solution rno new local optimal solution will appear rand the global optimal solution will also stabilize at a certain value gBest. Then rthe algorithm ends. Otherwise rset k = k + 1 and go to Step 3.
Figure 1 shows the flowchart of the algorithm.

Flow chart of PSO.
This section presents a specific case and its sensitivity analysis ras well as a comparison and analysis of the proposed PSO method with the current mainstream algorithms.
Case analysis
China is one of the countries most severely affected by typhoons. Fujian Province is located in the southeast coastal area of China ron the path of many typhoons and close to their source. When a typhoon makes landfall rthe severe storms and heavy rain not only pose huge threats to human life and property rbut also cause major problems for post-disaster rescue work by severely damaging roads and bridges. For instance rTyphoon Hagupit made landfall on the coast of Yueqing City rZhejiang Province rat around 3:30 a.m. on August 4 r2020. The maximum wind force near the center was level 13 (38 m/s). The storm then passed through Zhejiang and the two provinces of Jiangsu and Jiangsu. By 6:00 a.m. on August 5 r2020 rthe typhoon had moved from Yancheng rJiangsu rto the surface of the Yellow Sea rwhere it strengthened again. Zhejiang rFujian rShanghai rand other provinces and cities were all affected. Bridge damage and road blockage by floodwater rmud rfallen trees rand rockslides increased the difficulty of post-disaster rescue work rin that it was impossible to assign precise weights to rescue-path segments for the post-disaster response to Typhoon Hagupit.
Figure 2 depicts the topological structure of the road network during this period, and Table 1 lists the side lengths. A rescue team in Fuzhou must start from point A and reach point Q to rescue trapped residents. Therefore, they must determine the shortest path from starting point A to ending point Q. The sequence can be summarized as follows:
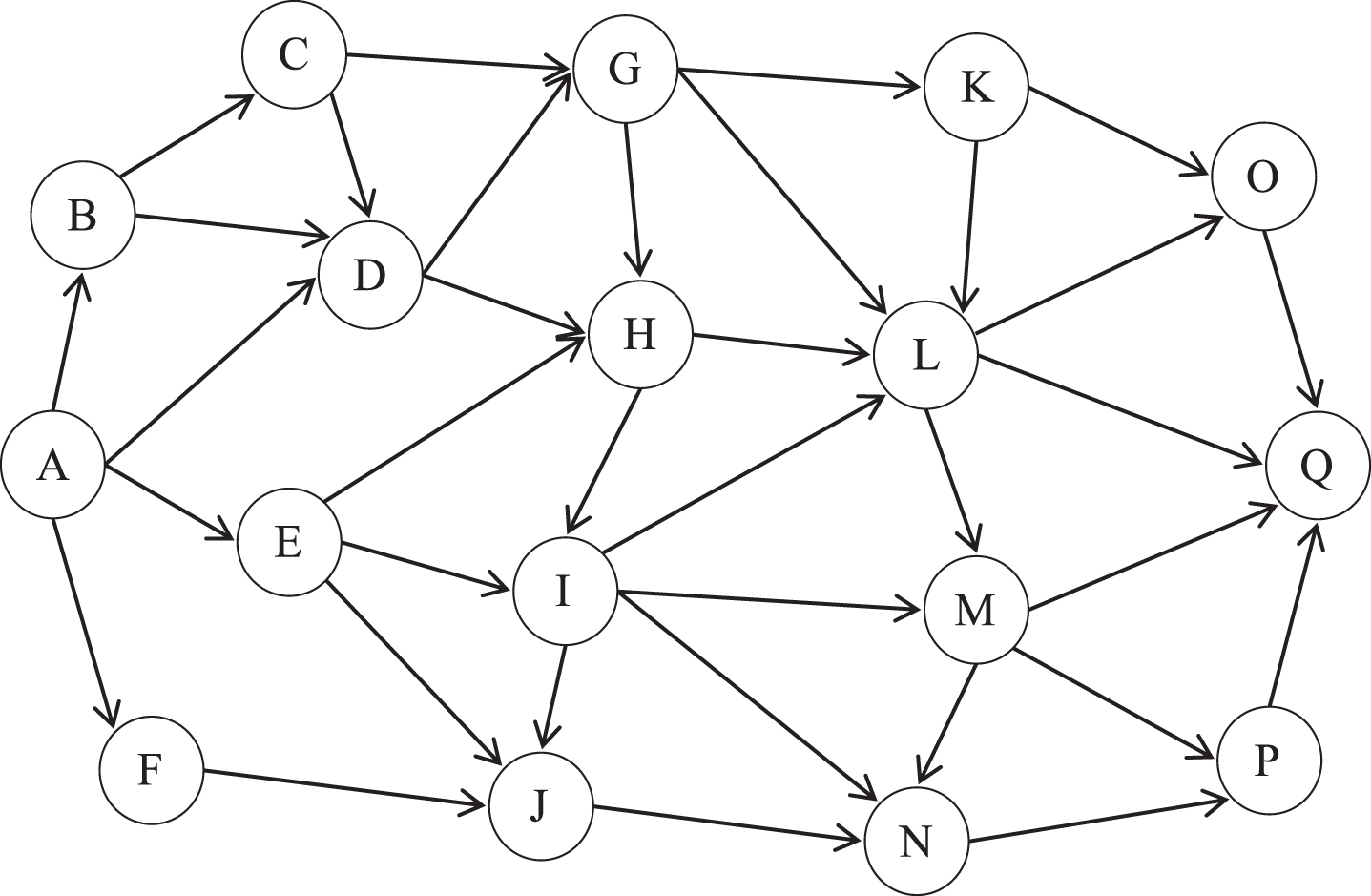
Interval-valued neutrosophic graph.
Edge weights as interval-valued NNs
Step 1: Initialize the parameters in the PSO: Set particle _ num = 5, c1 = 2, c2 = 2, and w = 1.4.
Step 2: Initialize the position
The initial value of the optimal solution passed by each particle is p
Step 3: Calculate the next-step velocity of the particle from its initial position and velocity,
Step 4: Compare the fitness value
Step 5: Update the global optimal solution gBest1= Min (
p
Step 6: Update the particle velocity
Step 7: Determine whether the algorithm satisfies the termination condition. Because all items in
p
Shortest path through the graph in Fig. 2.
Local optimal solutions for each particle
Figure 4 graphically depicts the convergence of the scores in Table 2.
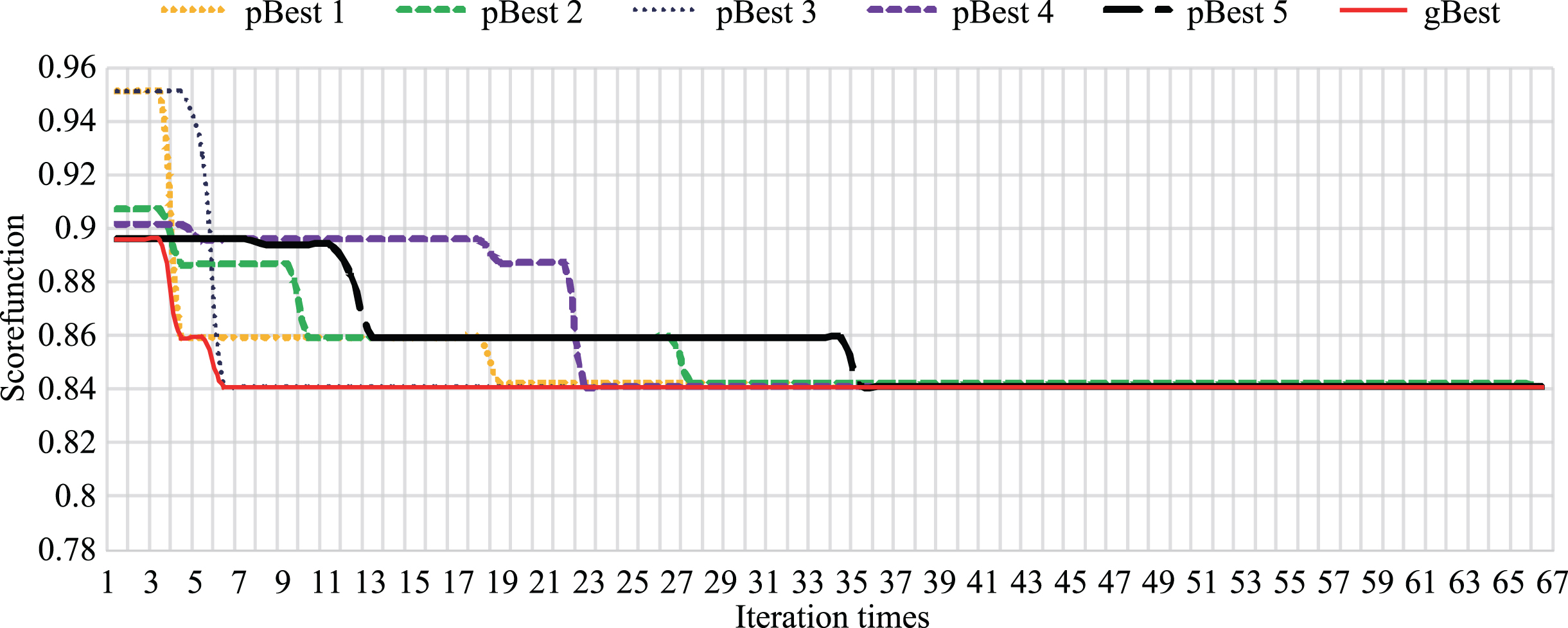
Convergence of local optimal solutions for five particles.
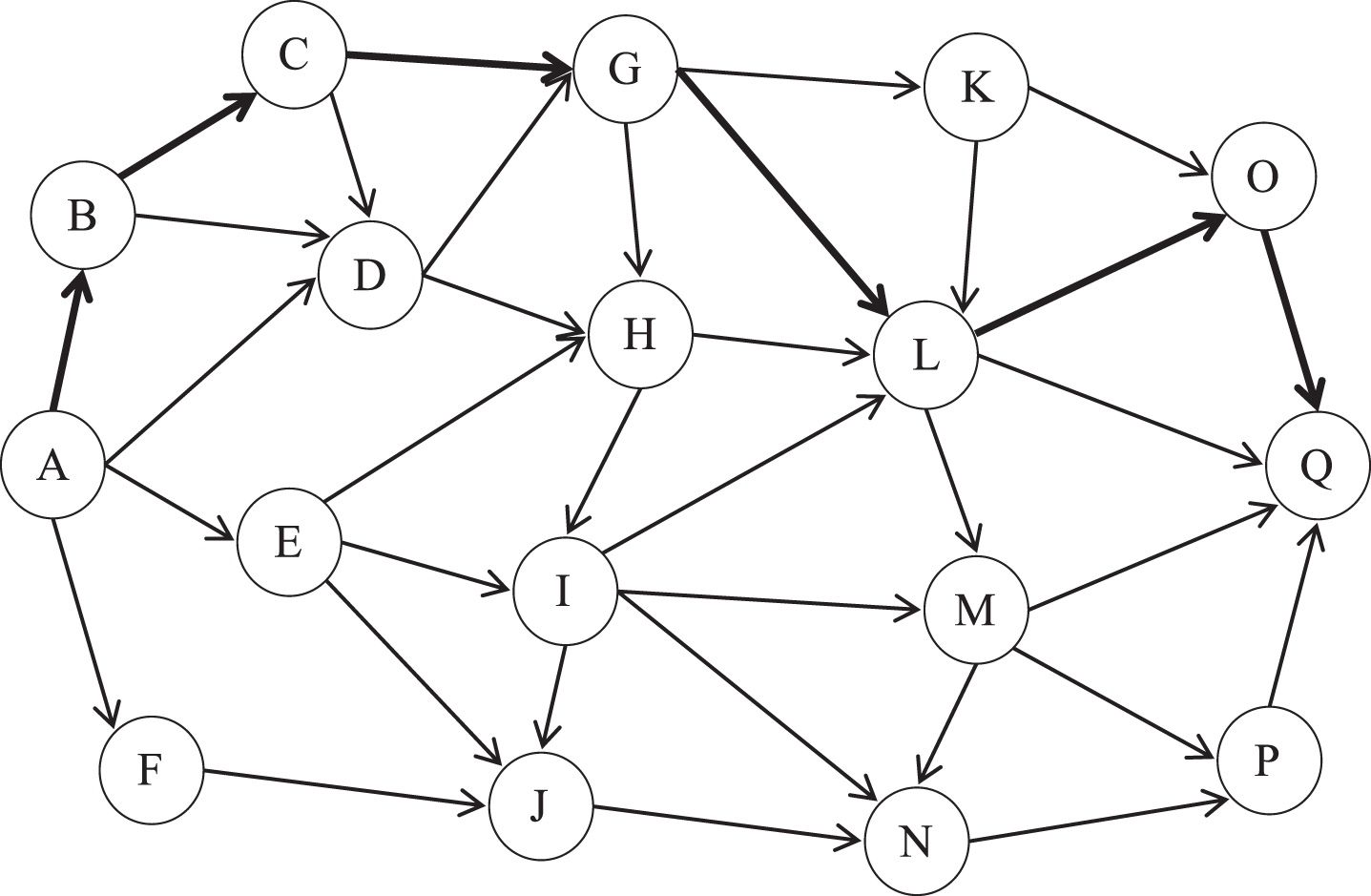
From Fig. 4, we can see that all five particles converge to the same optimal solution. When the number of iterations reaches 68, all particles converge to a path with a score function of 0.84097, which is the shortest path A->B->C->G->L->O->Q required by the system.
To find a reasonable setting of the parameters in the PSO, we studied the influence of each parameter on the efficiency of the algorithm. The specific method was to keep all the parameters but one unchanged, make the change in the single variable parameter take a value in a certain interval, and repeat the experiment 250 times for different values each time. The effect of this parameter on the efficiency of the algorithm was analyzed using the experimental data from the case discussed in Section 6.1. The experimental hardware is listed in Table 3.
Main hardware parameters of the experiment
Main hardware parameters of the experiment
Assume c1 = 2, c2 = 2, w = 1.4. The number of particles particle_num is a value in the interval [1, 175]. Depending on the number of particles, the number of iterations required for the algorithm to obtain the optimal solution varies. For each of the 250 repetitions of the experiment, we recorded the number of iterations required for convergence for one to 175 particles (Table 3). When the number of iterations exceeded 3000 and the optimal solution could not be obtained, the program was forced to exit the iteration, and the number of iterations was recorded as “max, ” which means that the experiment only found the local optimal solutions.
According to the data in Table 4, as the number of particles increases, the number of occurrences of “max” decreases, which means that the program becomes increasingly successful at finding the optimal solution.
Number of iterations for convergence in 250 experiments as function of number of particles
Number of iterations for convergence in 250 experiments as function of number of particles
In the program design, members of the particle model class include the particle position, distance between the particle and target, local optimal position, current speed of the particle, maximum speed, and fitness value. Table 5 lists the corresponding data types and storage spaces.
Members of particle model class
According to Table 5, the storage space that needs to be allocated for each initialization of a particle is 128 bytes. The more particles there are, the more storage space the program requires. The average number of iterations decreases as the number of particles increases, but the number of operations for each iteration increases. When calculating the running time of each experiment, we stopped timing from the first iteration to obtain the optimal solution, or else stopped when forced to exit. The experiment was repeated 250 times for each particle number to determine the average execution time of the program. As can be seen from Table 3, above a certain number of particles 14, the optimum solution was almost always found. For numbers of particles below this value, the success rate of the algorithm is relatively low.
Table 6 shows the relationships between the number of particles and the solution success rate, program running time, and program storage space, and Figs. 5, 6, and 7 depict the respective relationships for the full range of particle numbers [1, 175].
Algorithm success rate, average running time, and required storage space when the number of particles varies
As shown in Fig. 5, when the number of particles is less than 14, the success rate increases significantly as the number of particles increases. When the number of particles is greater than 14, the system solution success rate is maintained at 100%. It can be seen from Fig. 6 that when the number of particles is less than 27, the program running time decreases stepwise with increasing number of particles. When the number of particles is greater than 27, the program running time increases very slowly with increasing number of particles. From Fig. 7, we can see that the storage space required by the system has a linear relationship with the number of particles. Considering the success rate of program operation, running time, and required storage space, the best value range of the number of particles in this case is particle _ num ∈ [14, 25].
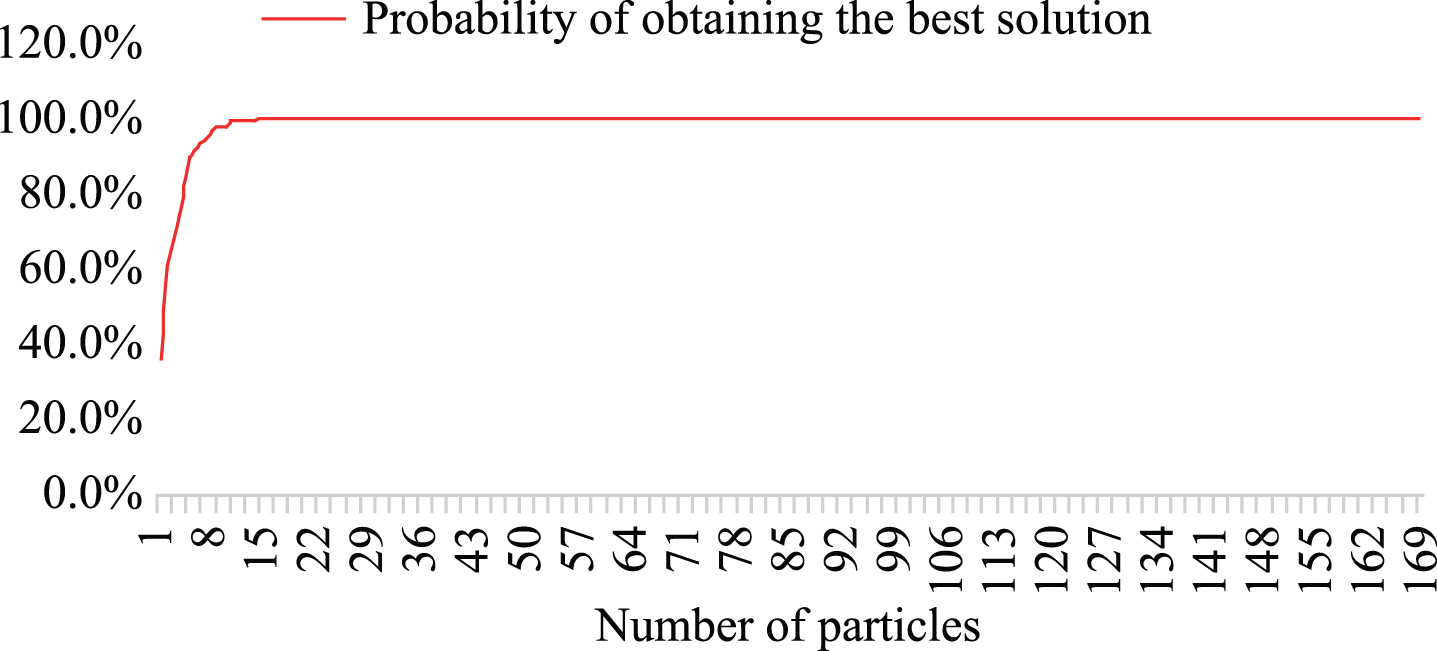
Relationship between number of particles and solution success rate.

Relationship between number of particles and program running time.
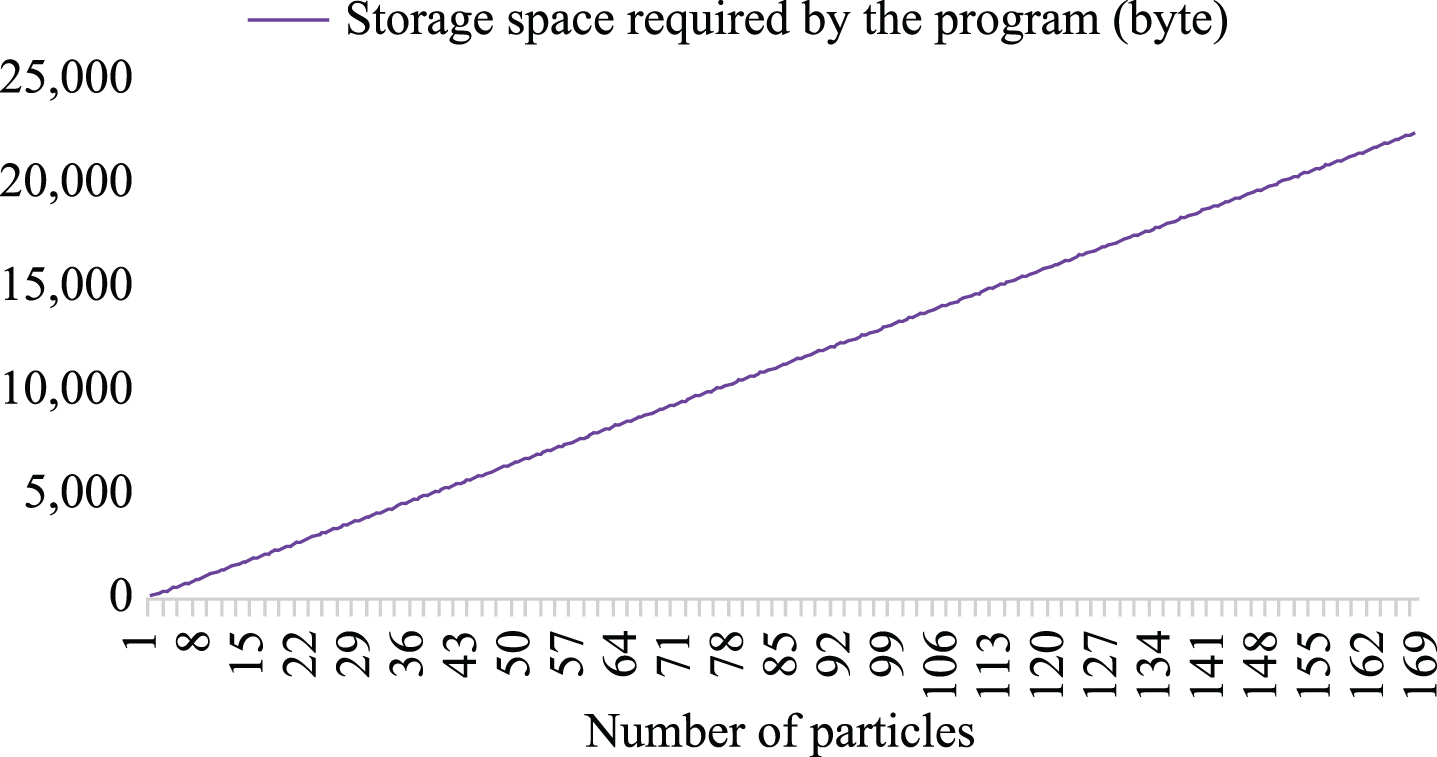
Relationship between number of particles and program storage space.
Assume that particle _ num = 20, c2 = 2, w = 1.4. When the value of c1 varies, the storage space required for the program operation is not affected. Constantly changing the value of c1 within the interval, we repeated the experiment 250 times for each value of c1 and recorded the success rate and the running time of the program, as shown in Table 7.
Success rate and average running time of the system when the value of c1 varies
Success rate and average running time of the system when the value of c1 varies
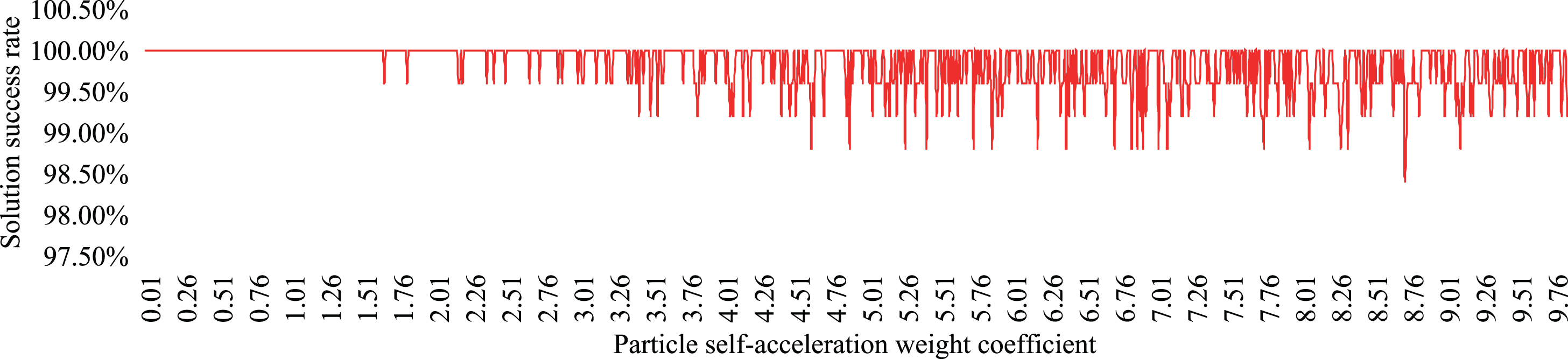
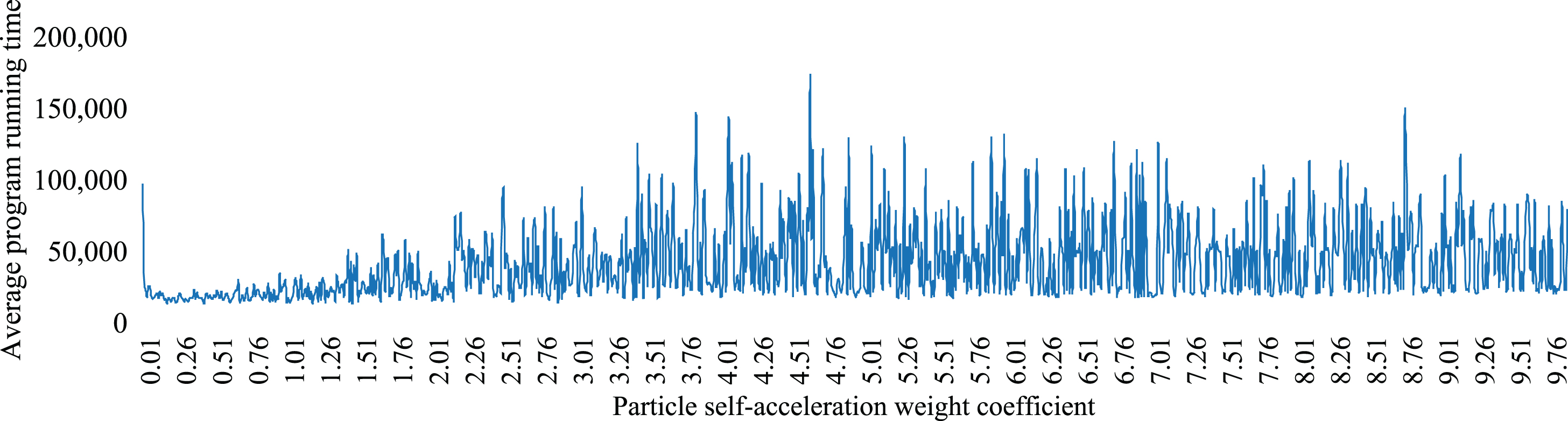
The relationship of the particle self-acceleration weight coefficient with the solution success rate and the program running time, given in Table 7, are shown graphically in Figs. 8 and 9, respectively.
Relationship between c1 and the solution success rate.
Relationship between c1 and the average running time of the program.
It can be seen from Fig. 8 that when c1 ∈ [0.01, 1.50], the success rate is stable at 100%, whereas when c1 > 1.50, the success rate fluctuates to varying degrees, but there are always solutions in multiple experiments. In unsuccessful situations, the solution success rate cannot be stabilized at 100%. It can be seen from Fig. 9 that when c1 ∈ [0.05, 1.36], the average running time of the system is basically stable between 15 ms and 40 ms, whereas when c1 > 1.36, the average running time of the system increases to varying degrees, reaching 173 ms at the highest. Considering the system solution success rate and time efficiency comprehensively, the best value range of the particle self-acceleration weight coefficient in this case is c1 ∈ [0.05, 1.36].
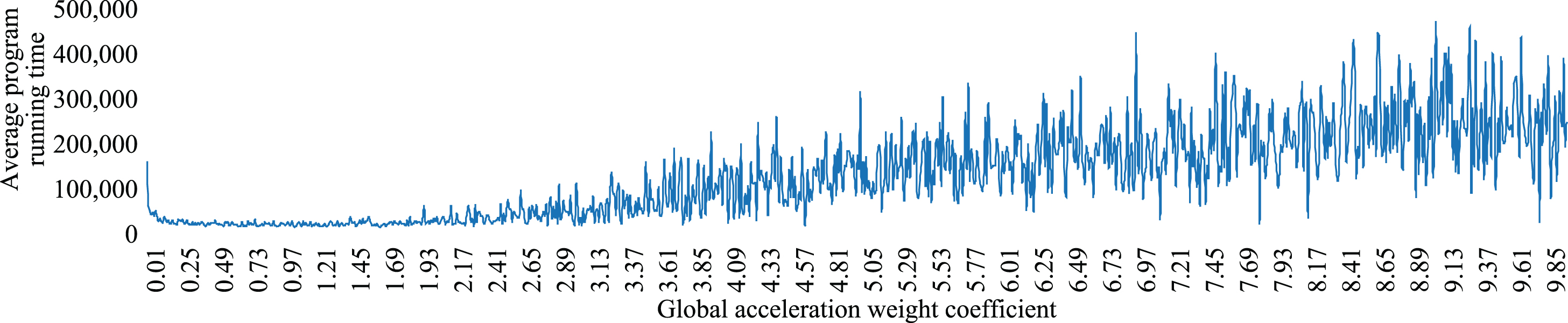
Assume that particle _ num = 20, c1 = 1.2, w = 1.4. When c2 varies, the storage space required for the program operation is not affected. Constantly changing the value of c2 within the interval, we repeated the experiment 250 times for each value of c2 and recorded the success rate of the optimal solution in the experiment and the running time of the program, as shown in Table 8.
Success rate and average running time of the system when the value of c2 varies
Success rate and average running time of the system when the value of c2 varies
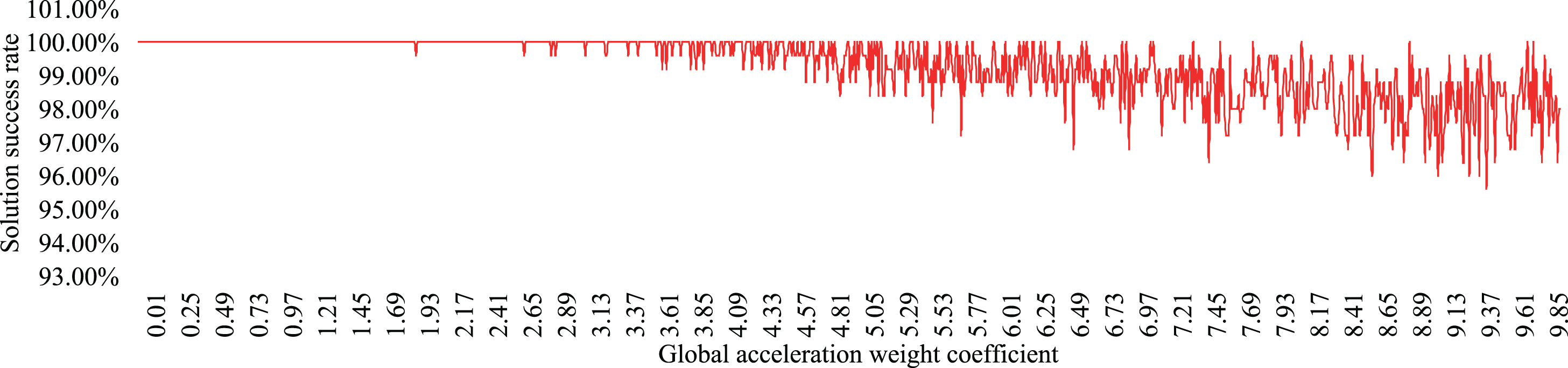
Table 8 shows the relationships between c2 the solution success rate and program running time, which are also depicted in Figs. 10 and 11, respectively.
Relationship between c2 and the solution success rate.
Relationship between c2 and the average running time of the program.
It can be seen from Fig. 10 that when c2 ∈ [0.01, 1.90], the success rate is stable at 100%, whereas when c2 > 1.90, the success rate fluctuates to varying degrees, and there are always failures in multiple experiments. In the case of success, the solution success rate cannot be stabilized at 100%. When c2 = 9.45, there are 11 unsuccessful solutions in 250 experiments. It can be seen from Fig. 11 that when c2 ∈ [0.05, 1.86], the average running time of the system is basically stable between 13 ms and 35 ms, and that when c2 > 1.86, the average running time of the system increases to varying degrees. The highest value is 470 ms. Considering the system solution success rate and time efficiency comprehensively, the optimal value range of the global acceleration weight coefficient in this case is c2 ∈ [0.05, 1.86].
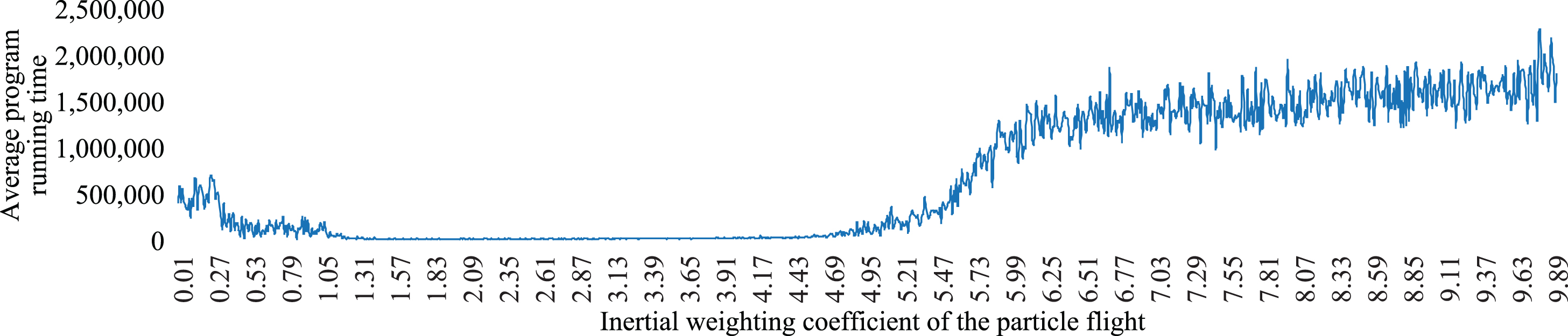
Assume that particle _ num = 20, c1 = 1.2, c2 = 1.2. When w varies, the storage space required for the program operation is not affected. Constantly changing the value of w within the interval, we repeated the experiment 250 times for each value of w and recorded the success rate and program running time, as shown in Table 9.
Success rate and average running time of the system when the value of w varies
Success rate and average running time of the system when the value of w varies
Table 9 shows the relationships between w and the solution success rate and program running time, which are also shown in Figs. 12 and 13, respectively.

Relationship between w and the solution success rate.
Relationship between w and the average running time of the program.
It can be seen from Fig. 12 that when w ∈ [0.01, 1.20], the success rate of the system solution rises as w increases. When w ∈ [1.20, 4.60], the system success rate is stable at 100%, whereas when w ∈ [4.60, 10.00], it decreases with increasing w, reaching a minimum of 68%. As shown in Fig. 13, when w ∈ [0.01, 1.30], as w increases, the program running time decreases. When w ∈ [1.30, 4.36], the program running time is basically stable between 12 ms and 16 ms, but when w ∈ [4.36, 10.00], the program running time increases with increasing w, reaching 2275 ms, which is 189 times the lowest value. Considering the system solution success rate and system solution time efficiency comprehensively, the optimal value range of w in this case is w ∈ [1.30, 4.36].
Based on the above analysis, the recommended ranges of the parameters of the PSO in this case are particle _ num ∈ [14, 25], c1 ∈ [0.05, 1.36], c2 ∈ [0.05, 1.86], and w ∈ [1.30, 4.36].
To demonstrate its effectiveness and rationality, the PSO algorithm proposed in this paper is compared with the Dijkstra algorithm proposed by Broumi in 2017 [53], Bellman algorithm proposed by Broumi in 2019 [55] and ant colony algorithm proposed by Yang in 2020 [58].
Comparison with the Dijkstra algorithm
The adjacency matrix can be established according to the edge weight information of the neutrosophic graph in Table 1:
Step 1: Let V be the set of all vertices; S be the set of determined vertices, initially containing only A; L be the set of determined edges, initially empty; and T = V - S be the set of all undetermined vertices. Initially, V = {A, B, C, D, E, F, G, H, I, J, K, L, , M, N, O, P, Q}, S = {A}, T = V - S = {B, C, D, E, F, G, H, I, J, K, L, M, N, O, P, Q}, and L = φ.
Step 2: Find the closest vertex to all elements in set S; that is, find the shortest edge among the edges (A, B), (A, D), (A, E), and (A, F). According to Definition 5, the score functions of the four edges can be calculated as follows:
According to Definition 6,
According to Definition 6,
Of all the edges in Fig. 2, only the elements in L are retained (Fig. 14).
As shown in Fig. 14, there is only one path A->B->C->G->L->O->Q from A to Q. This finding is consistent with the calculation results of the PSO method proposed in this report, demonstrating the effectiveness of this approach.
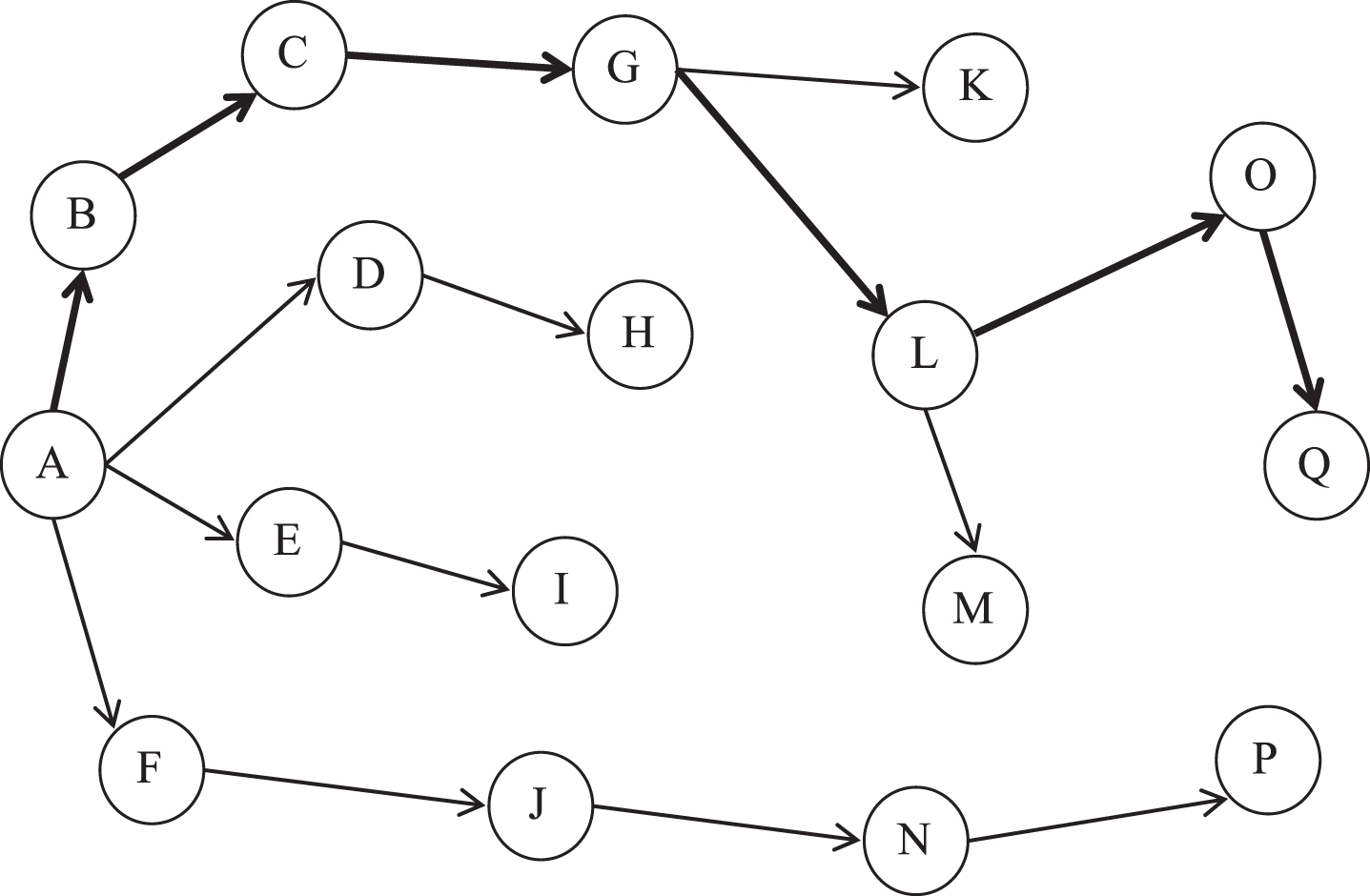
Results calculated using the Dijkstra algorithm.
From the perspective of the computational efficiency of the algorithm, note that each new vertex in S in the Dijkstra algorithm must be compared with an edge other than L. Assuming that the number of vertices in the neutrosophic graph is n, the time cost is O (n2). In contrast, the selected number of particles in the PSO has a linear relationship with the number of vertices. According to the data of the case analysis, the number of particles is
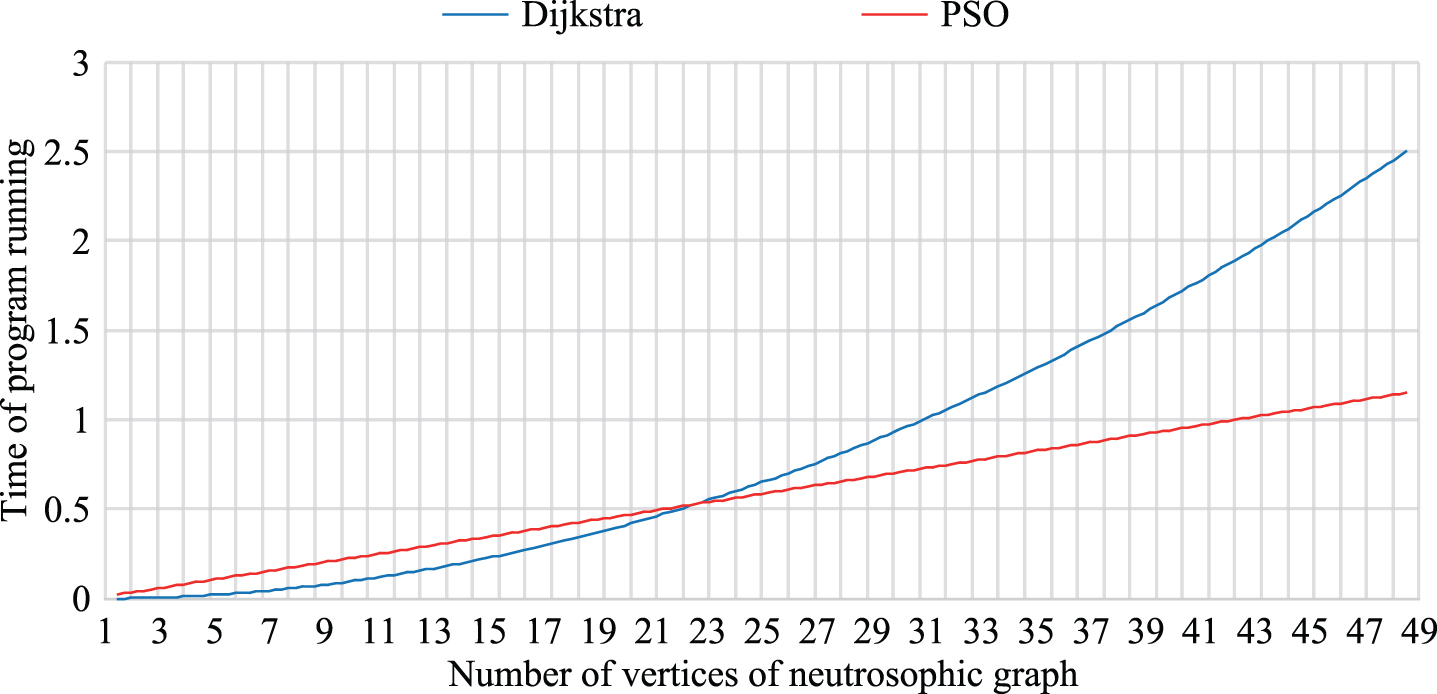
Comparison of the running times of the PSO and Dijkstra algorithms.
The abscissa in Fig. 15 represents the number of vertices in the neutrosophic graph, and the ordinate represents the time required for the program to run. From this figure, we can see that when n > 23, PSO has the advantage of a short running time. With increasing n, this advantage increases.
The Bellman algorithm [55] was also used to calculate the calculation examples in this study. Let f (i) represent the score function of the shortest path from A to vertex i and
According to this calculation step, we can finally obtain
Thus,
Therefore, the shortest path Pmin sought in this case is A->B->C->G->L->O->Q, and its score function
This finding is consistent with the calculation results of the PSO algorithm proposed in this report, demonstrating the effectiveness of this approach.
From the perspective of computational efficiency, we note that the Bellman algorithm must find the shortest path from all intermediate nodes to the starting point in sequence. Assuming that the number of vertices of the neutrosophic graph is n, the time cost is O (n3). The previous section explained that the time cost of PSO is approximately O (23n). Figure 16 compares of the running times of the PSO and Bellman algorithms (assuming that each operation requires time t = 0.001 s).

Comparison of the running times of the PSO and Bellman algorithms.
The abscissa in Fig. 16 represents the number of vertices in the neutrosophic graph, and the ordinate represents the time required for the program to run. From this figure, we can see that, as the number of vertices increases, the time required for the Bellman algorithm to run increases significantly faster than that for the particle swarm algorithm. When n > 5, the PSO has the advantage of a smaller running time. As n increases, so does this advantage.
Finally, the ant colony algorithm [58] was applied to the example addressed in this article. The ant colony algorithm, like PSO, is an intelligent algorithm. The number of particles used in the case analysis in this study was 5. For better comparison, we set the number of ants in the ant colony algorithm to five, so that both algorithms would have the same space cost.
Step 1: Initialize the pheromone concentration C i = 1, i ∈ [1, 176]; number of paths randomly selected in each iteration N = 5; pheromone-volatilization coefficient Δp = 5%; and pheromone-accumulation coefficient of the local optimal solution Δq = 10%.
Step 2: The system randomly selects five paths, P (ADHILOQ), P (ABDHLOQ), P (ADHIMPQ), P (ABCDHLMQ), and P (AEILMNPQ), from A to Q. Calculate the neutrosophic distances of these five paths.
Calculate the score function of these five random paths according to Eqs. (5) and (6), and find the minimum value
The local optimal solution for the first iteration is Pmin[0] = P(ABDHLOQ).
Step 3: Update the pheromone parameters.
① All pheromones volatilize and are reduced by 5% : C i = 1 × (1 - 5 %) =95 % , i ∈ [1, 176].
② The local optimal solution accumulates 10% of the pheromone: C P min[0] = 0.95 × (1 + 10 %) =1.045.
Step 4: Calculate the ratio of the pheromone of the path Pmin[0] to the total pheromone
That is, there is no need to specify the selected path P(ABDHLOQ). Then, randomly select another five paths, repeat Steps 2 and 3, and continually obtain the local optimal solutions and update the pheromone. On the 515th pass, we obtain the local optimal solution Pmin[514] = P(ABDHLOQ), the updated pheromone CP(ABCGLOQ) = 0.02831, and the sum of all path pheromones ΣC = 0.02972. We calculate the ratio of the pheromone of the path Pmin[514] to the total pheromone:
Figure 17 compares the convergence processes to the local optimal solution for the ant colony algorithm and PSO approach.
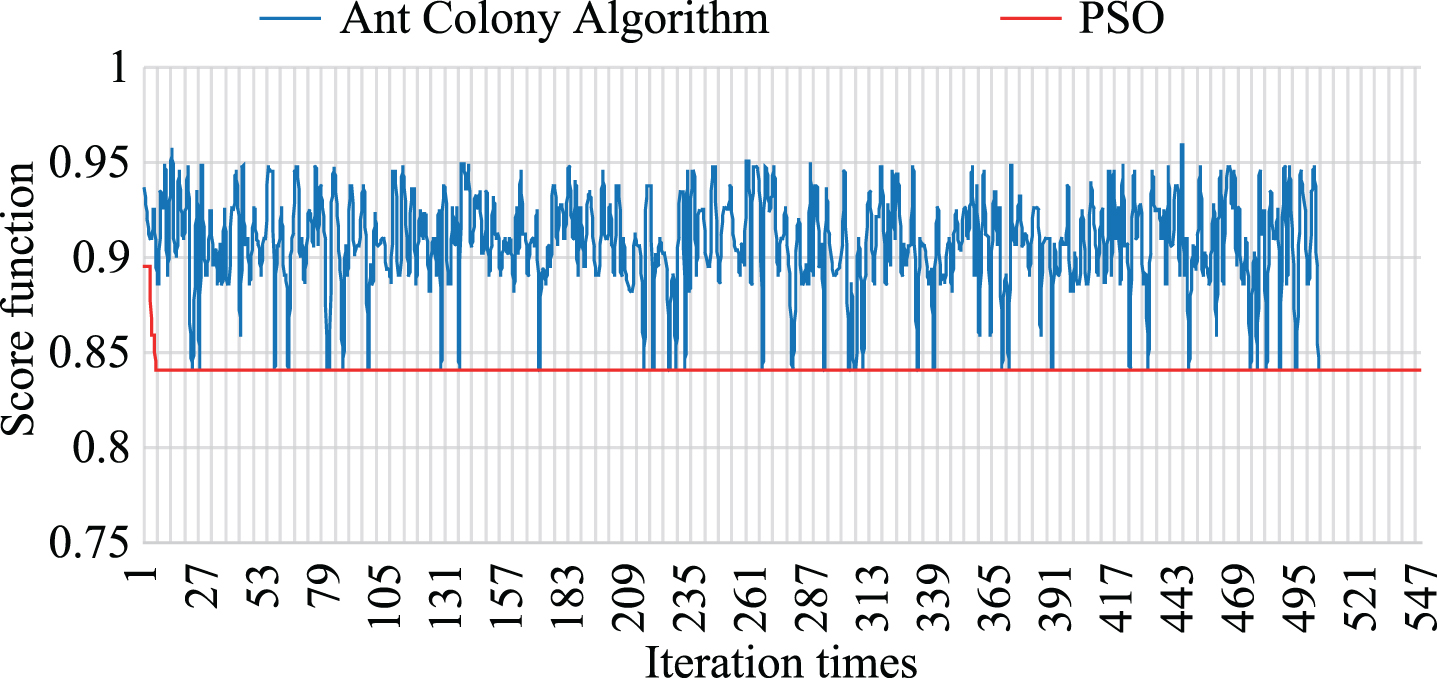
Comparison diagram of the iterative processes of the PSO and ant colony algorithms.
It can be seen from Fig. 17 that the PSO and ant colony algorithms finally converge to the same scoring-function value, i.e., the shortest paths they find are the same. The PSO approach only needs to iterate six times to reach the optimal solution and reaches stable convergence after the 68th iteration. The ant colony algorithm iterates 64 times before the optimal solution appears, after which it undergoes 452 iterations and oscillates at iteration 516. Stable convergence was achieved after two iterations. On the premise that the space cost of the program is consistent, PSO is obviously more efficient than the ant colony algorithm.
From the above comparative analysis, it can be concluded that PSO has the following advantages for solving the SPP of a neutrosophic graph: PSO is an uncertain algorithm. The uncertainty reflects the biological mechanisms of natural organisms. It does not depend on the strict mathematical nature of the optimization problem. It is thus suitable for the type of environment formed after a typhoon disaster. PSO is a bio-inspired optimization algorithm based upon multiple agents. The agents in the algorithm cooperate with each other to adapt better to the environment. Distributions can be used when dealing with complex problems with many nodes. Style programming improves the performance of the algorithms. Compared with traditional methods, PSO is more efficient in solving the SPPs of neutrosophic graphs.
In this study, we developed a PSO algorithm for solving the SPP on an interval-valued neutrosophic graph. Firstly, we verified the feasibility of utilizing PSO to solve the problem of typhoon disaster rescue route selection through a case study. Secondly, we conducted a sensitivity analysis of PSO and determined reasonable parameter settings through hundreds of repeated experiments. Finally, we compared the PSO approach with the current mainstream algorithms and proved that PSO is more efficient in solving the SPP of an interval-valued neutrosophic graph. However, the sensitivity analysis also revealed that, when the PSO solves discrete models, it can fall into a local optimal solution when the number of particles is insufficient. In future work, we will further optimize the algorithm to make it even more suitable for solving the SPP of a neutrosophic graph.
Footnotes
Appendix
Table 10 lists the meanings of all notations used in this paper.
Acknowledgments
This work was supported by the National Social Science Foundation of China (No. 17CGL058).