
Abstract
The interpolation functions of interval type-2 fuzzy systems and their universal approximation are investigated in this paper. Two types of fuzzification methods are designed to construct the antecedents and consequents of the type-2 inference rules. Then the properties of the fuzzy operator and the type-reduction algorithm are used to integrate all parts of the fuzzy system. Interpolation functions of interval type-2 fuzzy systems, which are proved to be universal approximators, are obtained based on three models, namely single input and single output, double inputs and single output, and multiple inputs and single output. The proposed approach is applied to approximate experiments of dynamic systems so as to evaluate the system performance. The system parameters are optimized by the QPSO algorithm. Experimental results for several data sets are given to show the approximation performances of the proposed interpolation functions are better than those of the interpolation function of the classical type-1 fuzzy system.
Keywords
Introduction
At the end of the last century, Karnik and Mendel [1–3] proposed type-2 fuzzy logic systems (hereafter referred to as type-2 fuzzy systems) based on Zadeh’s theory of type-2 fuzzy sets [4]. Compared with the classical type-1 fuzzy system, the interval type-2 fuzzy system has a stronger ability to deal with uncertainty in the aspects of system modeling, intelligent control, self-learning robots, etc., and has been widely accepted [5–8]. The application results show that the interval type-2 fuzzy controller has smaller tracking error and better stability and robustness than the classical type-1 fuzzy controller.
An interval type-2 fuzzy system [2] is composed of fuzzifier, inference, rules, type-reducer and defuzzifier. Among them, the type-2 fuzzy inference and type reduction require a huge amount of computation. Many studies have been devoted to simplifying the calculation of these two parts. By studying the properties of type-2 fuzzy operations [9–12] and the truth value algebra of type-2 fuzzy sets [13–15], the calculation of type-2 fuzzy inference has been greatly improved. As to type reduction, Karnik-Mendel (KM) algorithms [16] and its improved versions effectively transformed the interval type-2 fuzzy sets into type-1 fuzzy sets, such as enhanced KM (EKM) algorithms [17], the continuous version of KM (CKM) algorithms [18], weighted EKM (WEKM) algorithms [19]. Furthermore, Nagar-Bardini (NB) algorithms [20], weighted NB (WNB) algorithms [21] and other type reduction algorithms [22–24] have enriched the theoretical foundations for the research and application of type-reduction algorithms.
Although the calculation of interval type-2 fuzzy systems has been greatly simplified, no concise mathematical formula has been derived to express the systems. A classical type-1 fuzzy system can be considered as an interpolation function [25]. For example, a type-1 fuzzy system with double inputs and single output is approximately a binary piecewise interpolation function. However, the interpolation formula of type-2 fuzzy system has not been derived up to now. If its interpolation functions are available, we can well analyze and have a good understanding why the interval type-2 fuzzy system is better than the interval type-1 fuzzy system in the approximation ability, stability and robustness. Therefore, it is of great significance to research the functional expressions of interval type-2 fuzzy systems. This paper will derive the interpolation functions of interval type-2 fuzzy systems by integrating all parts of interval type-2 fuzzy systems. In addition, the computation of the whole type-2 fuzzy systems is reduced and the universal approximation of these interpolation functions is ensured.
This paper is structured as follows. Section 2 introduces some related concepts and theories of type-2 fuzzy sets and systems. Section 3 provides two types of specific methods for the interval type-2 fuzzification. Sections 4 and 5 deal with the interpolation functions of interval type-2 fuzzy systems with single and multiple inputs respectively. Section 6 presents the approximation ability of the proposed interpolation functions compared with the interpolation function of type-1 fuzzy systems by using a simulation example. Section 7 draws the conclusions.
Preliminaries
In this section, some concepts about type-2 fuzzy sets and systems are given, and the type-reduction algorithm [16] (named KM algorithm) is introduced. After that, two types of fuzzification methods are designed to construct the antecedents and consequents of the type-2 inference rules in an interval type-2 fuzzy system.
Type-2 fuzzy sets and systems
A fuzzy set of type-2
Let
The type-2 fuzzy system as shown in Fig.1 (see [2]) is very similar to the type-1 fuzzy system. Take the system with single input and single output as an example to introduce the construction process of a general type-2 fuzzy system in detail. It adopts the compositional rule of inference (CRI) algorithm in fuzzy inference, the centroid type-reduction algorithm in type-reducer and the center-of-gravity algorithm in defuzzifier.
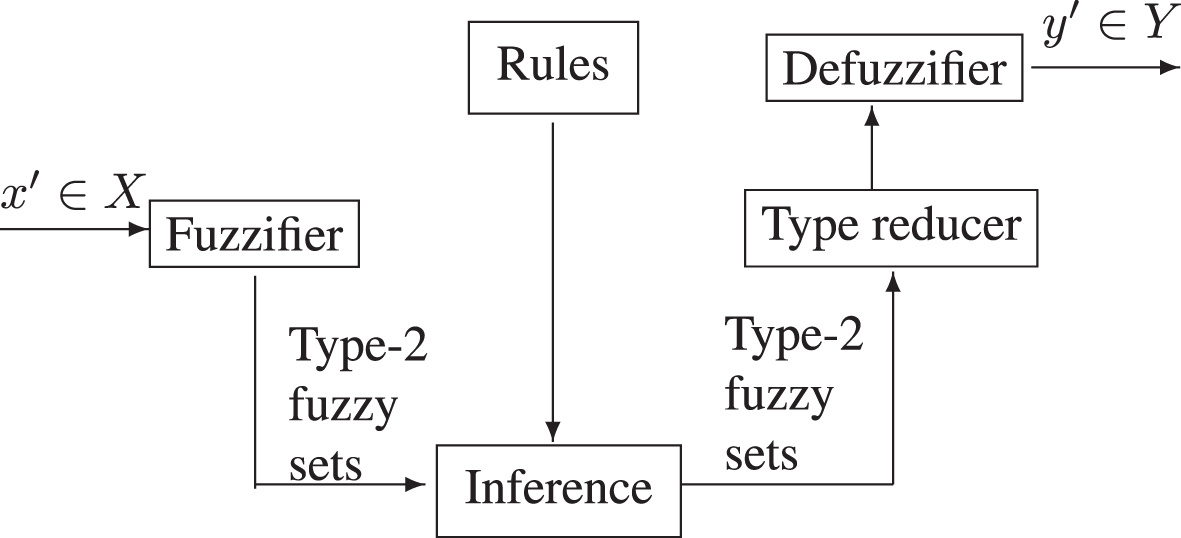
Type-2 fuzzy system
Let X and Y be the universe of the input and output variables respectively, where X = [a, b] and Y = [c, d]. Denote {(x
i
, y
i
)} 0⩽i⩽N a set of the input and output data, where x
i
∈ X and y
i
∈ Y. If the x
i
and y
i
are respectively fuzzified into the type-2 fuzzy sets
This calculation will take the KM algorithm [16] to give an approximate result for the type-reduced set C. Some related content is introduced below. By using the knowledge of the operation properties of interval type-2 fuzzy set, it can be known that the output
Set Find L such as Compute
Check if Set
The point c r can be obtained by using a procedure similar to the one described above:
Set Find R such as Compute
Check if Set
The above algorithms show that c
l
and c
r
have the following forms:
In this section, two methods are designed to construct the antecedents and consequents of the inference rules of interval type-2 fuzzy systems by taking the system with single input and single output as an example. Denote IOD1={(x i , y i ) ∣ 1 ⩽ i ⩽ N}. Assume that the data sets IOD1 used to construct the interval type-2 fuzzy system satisfies that
Given a data set IOD1, where a = x1 < ⋯ < x
N
= b . The antecedents Triangular fuzzification:
Parabola fuzzification:
Then {A
i
} 1⩽i⩽N are transformed into the type-2 interval fuzzy sets
Fuzzify {y
i
} 1⩽i⩽N into the type-1 fuzzy set {B
i
} 1⩽i⩽N with this property:
Set
Then two methods to construct the antecedents and consequents of the inference rules in this article are showed in Table 1. For example, let N = 5, [x1, x2, x3, x4, x5]=[-3, - 1.5, 0, 1.5, 3], δ
i
= 0.7 and γ
i
= 0.2, i = 1, …, 5. The figures of {A
i
} 1⩽i⩽N and
Two methods to construct the antecedents and consequents of the inference rules
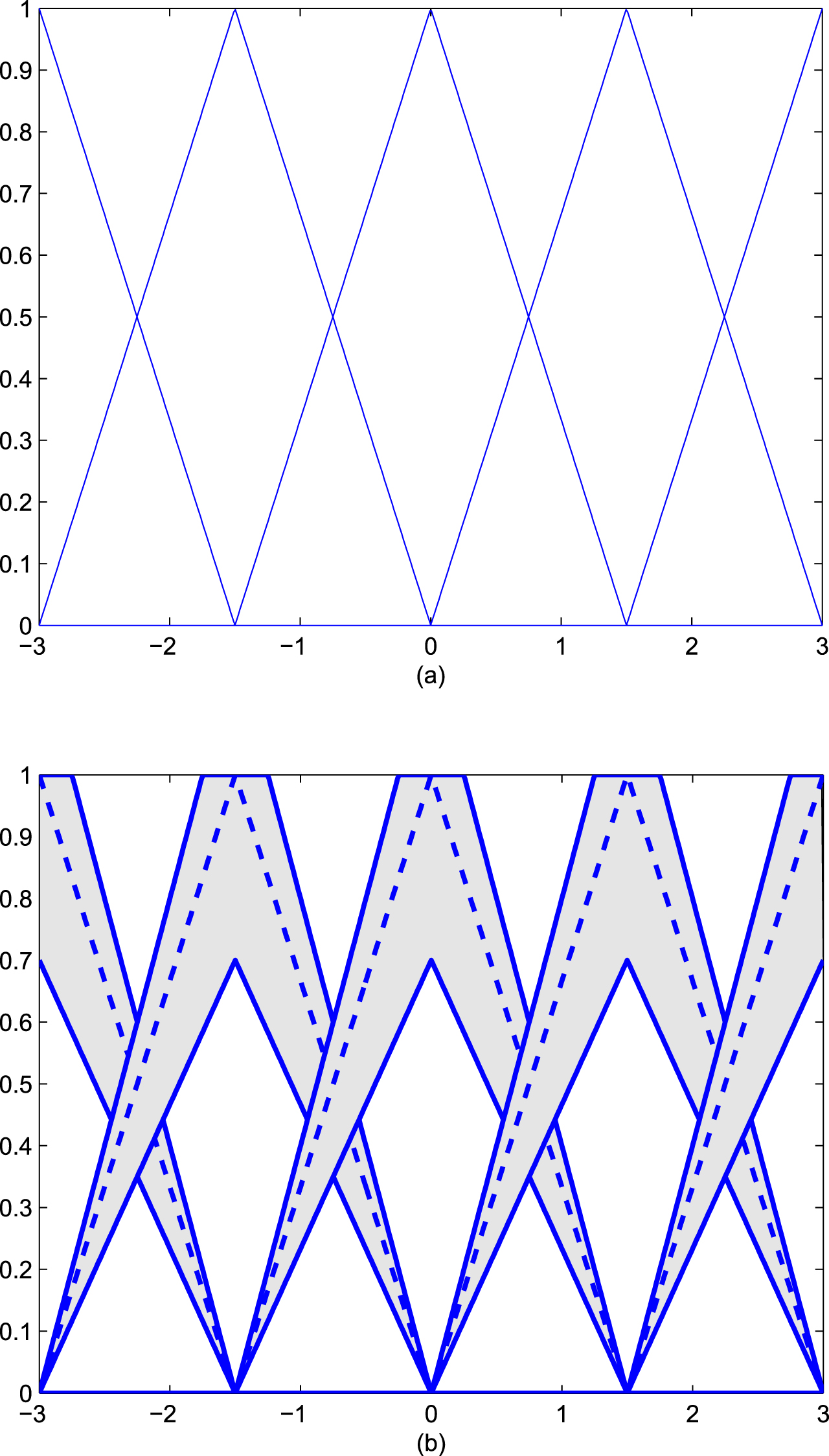
(a)The figure of the fuzzy set {A
i
} 1⩽i⩽N; (b)The figure of the interval type-2 fuzzy set
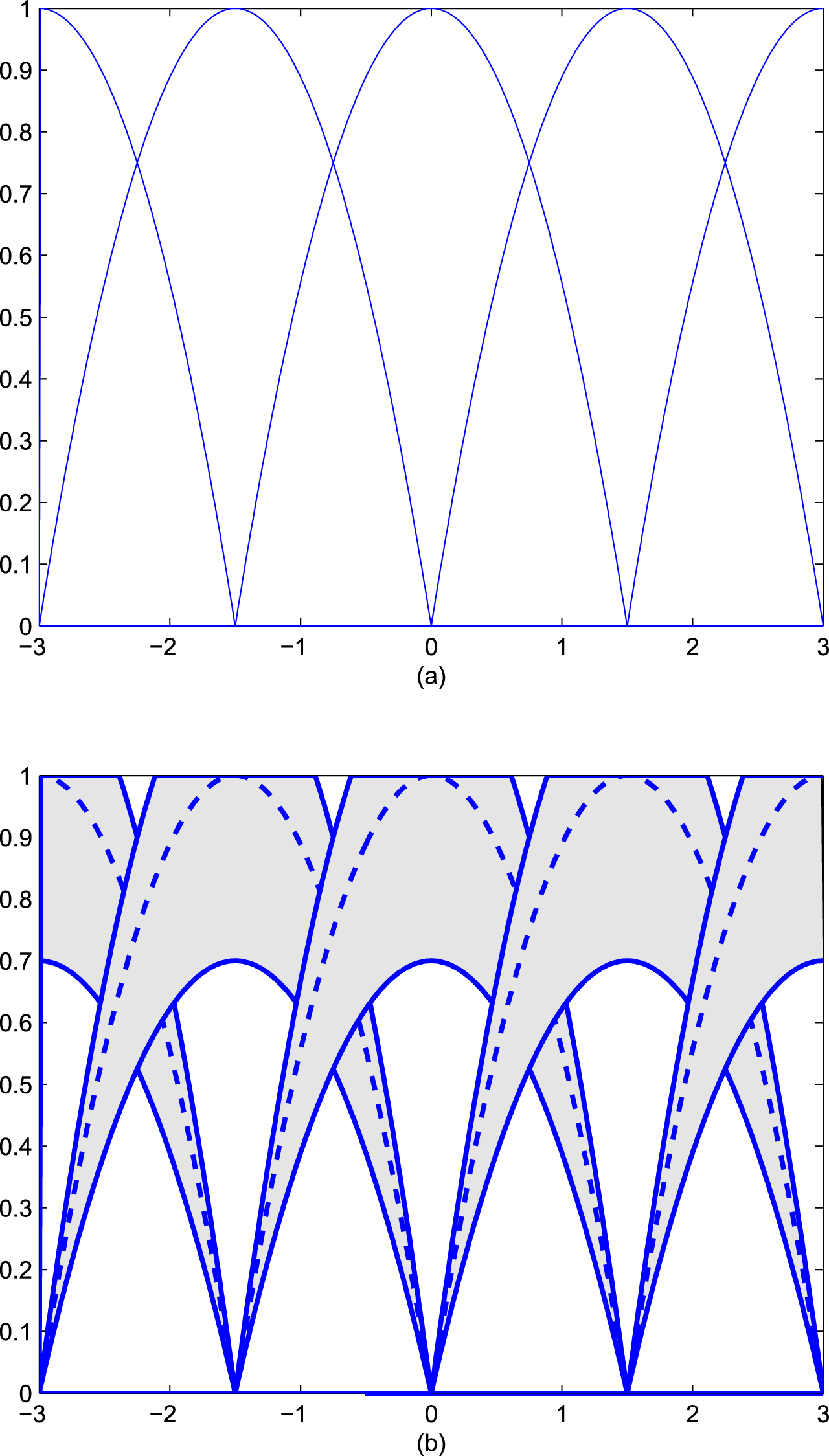
(a)The figure of the fuzzy set {A
i
} 1⩽i⩽N; (b)The figure of the interval type-2 fuzzy set
In this section, the interpolation function of an interval type-2 fuzzy system with single input and single output as well as its universal approximation are investigated. The data set IOD1 used to construct the system satisfies the property (6).
Moreover, because the values of
When
From the arbitrariness of x′, the expression of (14) is obtained. Next the interpolation property of (14) will be proved.
Let x′ = x
i
. We have Ai+1 (x
i
) =0. Together with (14), there is
This section deals with the interpolation functions of interval type-2 fuzzy systems with multiple inputs and single output. The case of double inputs and single output is analyzed firstly.
The interpolation function of interval type-2 fuzzy systems with double inputs and single output
The data set of constructing interval type-2 fuzzy system with double inputs and single output is given as IOD2 = {(x1i, x2j, y ij ) , 1 ⩽ i ⩽ p, 1 ⩽ j ⩽ q}. Its elements both satisfy the property (6) and the following ordering relationship
where (x1, x2) ∈ [x1i, x1,i+1] × [x2j, x2,j+1] , I
ij
= {(i, j) , (i + 1, j) , (i, j + 1) , (i + 1, j + 1)} , i = 1, …, p - 1, j = 1, …, q - 1, and
Without loss of generality, let
Since the interpolation function of the interval type-2 fuzzy system contains permutation, for the sake of simplicity, the construction data set of the interval type-2 fuzzy system with multiple inputs and single output are required as
Without loss of generality, let
This section will take the interpolation function of an interval type-2 fuzzy system (14) to approximate a dynamic system with double inputs and single output, then compare the experiment results of three classes of interpolation functions of interval type-2 fuzzy systems, denoted by IT2-t-min-FS, IT2-t-pro-FS and IT2-p-pro-FS, and a class of interpolation function of type-1 fuzzy system in [25], denoted by T1-t-pro-FS, respectively. The methods of fuzzification and fuzzy operators adopted in each functions are shown in Table 3.
Select Van der Pol equation as the real model:
Let p = 6, q = 7. Then the quantum-behaved particle swarm optimization (QPSO) algorithm [26] is applied to optimize the construction parameters of the interval type-2 fuzzy system δ11—δ1p, δ21—δ2q, γ11—γ1p and γ21—γ2q, and
The structure information of 4 classes of interpolation functions of fuzzy systems
The parameters values of 3 classes of interpolation functions of interval type-2 fuzzy systems
Three kinds of RMSEs for the four classes of interpolation functions are showed in Table 4. It can be seen that every kinds of RMSEs of IT2-t-min-FS (or IT2-t-pro-FS, IT2-p-pro-FS) are smaller than those of T1-t-pro-FS. When the white noise with mean value 0 and variance 0.1 is added to the sampled data set, the results remain the same (see Table 5). Therefore, simulation results show that the approximation performances of IT2-t-min-FS, IT2-t-pro-FS and IT2-p-pro-FS are better than those of T1-t-pro-FS.
RMSEs of 4 classes of interpolation functions of fuzzy systems
RMSEs of 4 classes of interpolation functions of fuzzy systems with noise
Under certain conditions, an interval type-2 fuzzy system can be transformed into a piecewise interpolation function with the property of universal approximation. We can just use the interpolation function instead of link-by-link design in the systems, and continue to research other undetected properties of type-2 fuzzy systems by studying their interpolation functions. The parameters of every interpolation functions of type-2 fuzzy systems play an important role in system modeling. In our simulation, the QPSO algorithm is used to optimize the construction parameters of interval type-2 fuzzy systems. By adjusting antecedent factors for different models, a better approximation effect can be achieved.
It can be seen that the functional expressions of interval type-2 fuzzy systems are very similar in forms with type-1 fuzzy systems. Li [25] pointed out that type-1 fuzzy control algorithm is equivalent to the finite element method of mathematical physics, and it is a kind of direct method or numerical method of control theory. The conclusion of this paper provides a useful supplement for the numerical form of high type fuzzy control algorithm and enriches the theoretical research of fuzzy control.
Footnotes
Acknowledgment
This paper is funded by the National Natural Science Foundation of China (No. 12071325).