
Abstract
Autonomous groups of particles swarm optimization (AGPSO), inspired by individual diversity in biological swarms such as insects or birds, is a modified particle swarm optimization (PSO) variant. The AGPSO method is simple to understand and easy to implement on a computer. It has achieved an impressive performance on high-dimensional optimization tasks. However, AGPSO also struggles with premature convergence, low solution accuracy and easily falls into local optimum solutions. To overcome these drawbacks, random-walk autonomous group particle swarm optimization (RW-AGPSO) is proposed. In the RW-AGPSO algorithm, Levy flights and dynamically changing weight strategies are introduced to balance exploration and exploitation. The search accuracy and optimization performance of the RW-AGPSO algorithm are verified on 23 well-known benchmark test functions. The experimental results reveal that, for almost all low- and high-dimensional unimodal and multimodal functions, the RW-AGPSO technique has superior optimization performance when compared with three AGPSO variants, four PSO approaches and other recently proposed algorithms. In addition, the performance of the RW-AGPSO has also been tested on the CEC’14 test suite and three real-world engineering problems. The results show that the RW-AGPSO is effective for solving high complexity problems.
Keywords
Introduction
Economic and social progress are important parts of effectively solving and managing complex optimization problems. Traditional mathematical theory-based optimization techniques have made great contributions to the development of human society. With the improvement of social productivity, the problems that are faced by human beings are becoming increasingly complicated, and most of these optimization problems have constraints of different forms that change the shape of the search space. Traditional optimization techniques always need gradient information to solve these problems, and even then, they cannot obtain satisfactory solutions and may require an unacceptably high computational cost. To overcome the abovementioned shortcomings of the traditional optimization techniques, researchers have developed a number of meta-heuristic optimization algorithms due to advantages, such as exploring and detecting promising regions in the search space at an accurate time. These newly proposed meta-heuristic techniques have been used to obtain global or near-global optimum solutions, making these methods quite suitable for global searches [1]. Therefore, the work to study and propose new meta-heuristic algorithms has greatly aroused the interest of researchers, and several typical methods can be found in the literature, such as the particle swarm optimization (PSO) [2], the artificial bee colony (ABC) [3], the dragonfly algorithm (DA) [4], the ant colony optimization (ACO) [5], the grey wolf optimizer (GWO) [5], the autonomous groups particles swarm optimization (AGPSO) [6], and several other well-known algorithms. These heuristic optimization algorithms have been proven to be effective and have potential in a large number of practical applications.
According to the no free lunch (NFL) theorem [8], the performance of all heuristic optimization algorithms is equivalent to solving all optimization problems; the difference is that an algorithm shows a better performance on certain problems, but it may weaken a performance on other problems. No heuristic optimization algorithms are perfect for solving all complex problems. This theorem urges researchers to propose many novel or modified heuristic optimization algorithms now and then.
Particle swarm optimization (PSO) is a well-known nature-inspired optimization technique that is inspired by the survival behaviors of individual birds and fish swarms [9]. The excellent features of the PSO technique, such as its robustness, efficiency, and simplicity, allow it to be widely used in real-world applications [10, 11]. Due to these advantages, PSO and its improvement variants, such as adaptive perceptive particle swarm optimization (APPSO), have been employed in medical diagnosis [12], modified particle swarm optimization (MPSO) for energy resource scheduling [13], multi-objective particle swarm optimization (MOPSO) for multirobot path planning [14], adaptive particle swarm optimization (APSO) for engine parameter optimization [15], and other fields [16–20]. However, despite the PSO algorithm and its modified versions having these attractive advantages, their drawbacks are also obvious. Easily becoming trapped in local minima, premature convergence and low solution accuracy are three challenging problems that worsen as the dimensionality of the problem increases [7, 21]. To combat these problems, researchers have tested some useful methods to improve the PSO algorithm. These include hybrid PSO with other optimization techniques [22–24], introducing different types of topologies into the PSO algorithm [25, 26], and using dynamic parameter tuning in the PSO algorithm [27–32]. Although the PSO variants mentioned above have improved the PSO’s optimization performance to some extent, it is difficult to simultaneously overcome premature convergence, achieve highly accurate solutions and escape from local optima [11]. Therefore, these efforts to improve the PSO algorithm are still unsatisfactory at addressing many real-world problems.
Autonomous group particles swarm optimization (AGPSO) is a recently proposed PSO variant that was developed by Mirjalili [7]. The AGPSO algorithm has three versions (i.e., AGPSO1, AGPSO2 and AGPSO3). For these AGPSO variants, AGPSO3 outperforms AGPSO1 and AGPSO2. The results from experiments that were conducted on 23 benchmark test functions show that the AGPSO algorithm has a stronger ability to avoid local minima and a better convergence speed than other PSO algorithms. However, the main drawbacks of these three AGPSO algorithms, which are reflected in the experimental results, are a low solution accuracy and easy premature convergence. These drawbacks may be caused by the imbalance between the exploration and exploitation of particles in the AGPSO algorithm in the iterative search process. In the AGPSO algorithm, four different groups with different search abilities are designed to search the problem space both locally and globally [7]. These strategies allow the AGPSO algorithms to have better performances than PSO, but the algorithm easily falls into local optima when one of the locally optimal particles is the global one. Therefore, some information, which is generated by the global optimal particle and the local optimal particles, should be removed from the position update equation of the AGPSO algorithm. Based on this point, this work proposed an improved variant of AGPSO with a Levy flight, named RW-AGPSO. In this work, the local optimal particles will update their positions with the guidance of the global optimal particle by employing the Levy flight rule in every iteration, and this position information is for those that need to be eliminated to avoid falling into local optima. In addition, a dynamically changing weight was designed to dynamically adjust the amount of information that needs to be deleted during different iterations. The motivation to design a dynamically changing weight for the RW-AGPSO algorithm is that in the initial iteration, the algorithm has a higher diversity of potential solutions, and a small change weight needs to accelerate the convergence speed. In the later iteration, the local optima particles all gather near the global optima, and a larger change weight needs to increase the possibility of the algorithm escaping local optima. The effectiveness of this proposed strategy is verified on 23 representative benchmark test functions and the CEC 2014 test suit. The comparison results between the RW-AGPSO algorithm, the three AGPSO methods and the four PSO algorithms (TACPSO [30], MPSO [31], IPSO [32], and PSO [2, 9]) on 23 test functions show that it is largely improved in terms of solution accuracy, stability and local optima avoidance. In addition, the comparison results between RW-AGPSO and TACPSO, IPSO, GWO and DGWO [35] on the CEC2014 test suit show its superiority in solving different complex problems.
The main contributions of this work are summarized as follows: An improved AGPSO algorithm, RW-AGPSO, is proposed for global optimization. RW-AGPSO, based on the deep analysis of the position-update equations of the original AGPSO, employs two search strategies Levy flight and dynamically changing weight, to balance exploitation and exploration. RW-AGPSO is tested on three kinds of benchmark test problems and the CEC 2014 test suite. Several important performance aspects such as solution quality, convergence speed, robustness, and statistics are compared with the original RW-AGPSO and several variants of PSO, as well as those reported results of some recently-proposed global optimization methods to comprehensively verify the effectiveness of RW-AGPSO.
The remainder of this paper is arranged as follows: Section 2 overviews the PSO algorithm and the AGPSO algorithm. In Section 3, we design an adaptive nonlinear dynamic changing weight for the position of the AGPSO algorithm. In addition, the flow chart and pseudocodes of the RW-AGPSO algorithm are presented in this section. In Section 4, we compared the proposed RW-AGPSO algorithm with the three AGPSO algorithms (i.e., AGPSO1, AGPSO2 and AGPSO3) on 23 benchmark test functions, selected several state-of-the-art algorithms to compare with the proposed RW-AGPSO algorithms on 13 classic large-scale optimization problems, and analyzed their optimization performances. Finally, Section 5 concludes the paper, and presents our future research directions.
The basic concept of PSO and AGPSO
The PSO algorithm
PSO is an evolutionary computation technique that was inspired by the social behaviors of individuals (particles) in bird and fish swarms, and it was developed by Kennedy and Eberhart [9]. In the PSO algorithm, the particles in a biological swarm are considered to be potential solutions. Those particles have a certain learnability and the i-th particle will choose to learn from its personal previous best particle (denoted by
Inspired by the diversity of individuals in animal or insect swarms, Mirjalili et al. [7] proposed the concept of autonomous groups and introduced it into the conventional PSO algorithm to form the AGPSO algorithm. According to the concept of autonomous groups, in any gathering, individuals usually differ in intelligence and ability, but they all perform their duties for the group. Each individual’s intelligence and ability can contribute to the group in a particular situation. For example, termite colonies are one of the most representative insect swarms. In termite colonies, four kinds of termites including soldiers, workers, babysitters, and queens form their large family. In this family, soldiers have duties to guard their family and to fight enemies, workers are responsible for finding and providing food for the colony and building the nest, and the queen and babysitters are responsible for reproducing and raising children, respectively. These four types of termites are the four famous autonomous groups whose common goal is to promote colony survival. From the viewpoint of Mirjalili et al. [7], using diverse autonomous groups, such as termite colonies, in any population-based optimization method could theoretically achieve more randomized and directed searches.
Based on the above analysis, the four autonomous groups that are inspired by termite colonies were mathematically modeled in the literature [7], and different strategies were designed to update c1 and c2 of the conventional PSO. Therefore, three different PSO variants with different autonomous groups, AGPSO1, AGPSO2, and AGPSO3, were proposed by Mirjalili et al. [7].
The dynamic coefficient formulations for c1 and c2 of these algorithms are listed in Table 1. In Table 1, t is the current iteration and T is the maximum number of iterations. At each iteration, gbest, pbest, and the fitness of the particles are defined. For each particle, the coefficients c1 and c2 are updated by using the autonomous groups strategy that is listed in Table 1. When updating c1 and c2, the velocities and positions of particles will be calculated using Equations (1) and (2), respectively.
The dynamic coefficient formulations for c1 and c2 of the AGPSO algorithm
The dynamic coefficient formulations for c1 and c2 of the AGPSO algorithm
Algorithm 1 shows the pseudocode of the AGPSO algorithm [7], where “zeros (N, D)” indicates that a zero vector contains N rows and D columns.
The principle of Levy flight
The principle of Levy flight was first introduced by Paul Levy, who is a well-known French mathematician, in 1926 [36]. Levy flight is a common random walk phenomenon in the real-world, and this activity can be easily found in schools of cuckoo birds, swarms of wasps and packs of wolves. The principle of Levy flights was successfully applied in cuckoo search (CS) algorithms [37], and this random walk is modeled as follows:
Assuming pbesti is the position of the i-th local optima particle, then the new position
In the AGPSO algorithm, the diversity of solutions is higher in the initial search stage and the algorithm has a strong exploration ability. In contrast, in the later search stage, all of the particles will gather near to the global optimal particle, and the poor diversity of solutions will cause premature convergence and fall into a local optimum. Therefore, in the initial iteration stage, a relatively small change weight, which is used to remove the information that generated by the global optima particle and a local optima particle, is necessary to accelerate the convergence speed of the algorithm and enhance its exploration performance. However, in the later iteration stage, a dramatically changing weight facilitates the disturbance of the particles to prevent them from falling into a local optimum. Considering these points, we propose a dynamic weight strategy. Figure 1 shows the change in the weight values as the number of iterations increases.
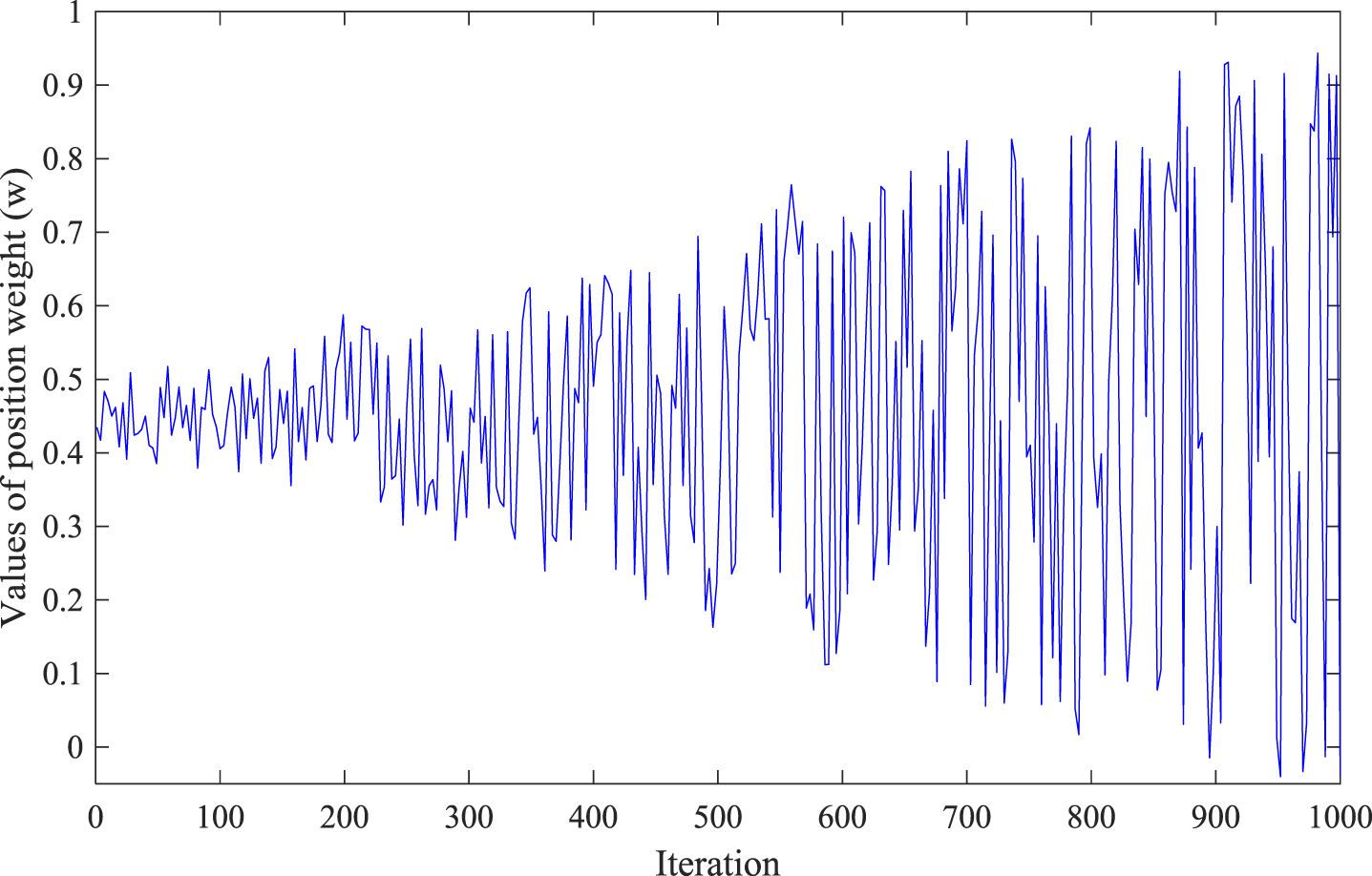
Updating the values of weight over the course of iterations.
Based on the above analysis, the weight formula is modeled based on the sinusoidal function as follows [36]:
Based on the Levy flight and dynamically changing weight strategies, the position-updated equation of the AGPSO algorithm is modified by removing the redundant information generated by the global optimal particle and a local optimal particle as follows:
For Equation (10), the fourth term on the right side of the equation is the core of RW-AGPSO. In this term, the dynamically changing weights play an important role in improving the convergence of the algorithm. A small weight is designed in the initial iteration, which makes the RW-AGPSO algorithm struggle with less disturbance and ensures that the particle individual quickly gathers toward the global optimal individual. This strategy accelerates the speed of particles to approach the global optimum and therefore, accelerates the convergence of the algorithm in the early stage of the iteration. In contrast, in the later iteration of the algorithm, individuals all gather around the global particle, and the diversity of particles drops sharply. If this global particle is unlikely to be locally optimal, then the algorithm will lose its ability to jump out of the local optimum. Faced with this situation, a large weight is needed to increase the disturbance of the particles, and make these particles have more diversity. Once the diversity of particles increases, the probability of the algorithm jumping out of the local optimum will increase. Therefore, the speed at which the algorithm converges to the global optimum is increased. Based on the above analysis, the dynamically changing weights improve the convergence of the algorithm.
The pseudocode of the RW-AGPSO algorithm is described as Algorithm 2.
The computational complexities of the RW-AGPSO and AGPSO are summarized as follows: (1) In the initialization phase, the computational complexities of the RW-AGPSO and AGPSO are O(N×D) time, where N represents the population size and D represents the dimension of the problem; (2) Calculating the control parameters and weights of RW-AGPSO and AGPSO requires O(N×D) time; (3) Updating the position of each agent of RW-AGPSO and AGPSO requires O(N×D) time; and (4) Evaluation of the fitness value of each particle requires O(N×D) time.
Simulation results analysis and discussions
Benchmark functions
To test the global optimization performance of RW-AGPSO, three different benchmark function suites are taken from the literature [7] and include seven unimodal functions (as shown in Table 2), six multimodal functions (as shown in Table 3), and ten fixed-dimension multimodal functions (as shown in Table 4). In these tables, “D” is the dimension of the benchmark function, Range represents the boundaries of the search space, and f min is the theoretical optimal value of the function. To investigate the optimization performance of the RW-AGPSO algorithm in low-dimensional and high-dimensional problems, unimodal and multimodal functions with 30 and 1000 dimensions respectively are chosen for the experiments. In addition, to conduct a comprehensive optimization performance analysis, ten fixed-dimension benchmark functions were been chosen for the experiments.
Description of seven classic unimodal benchmark functions
Description of seven classic unimodal benchmark functions
Description of six classic multimodal benchmark functions
Description of ten classic fixed-dimension multimodal benchmark functions
To achieve a reasonable optimization performance comparison for the algorithms, the RW-AGPSO algorithm is compared with the AGPSO variants AGPSO1, AGPSO2 and AGPSO3; some recent PSO improvements with time-varying accelerators such as TACPSO [30], MPSO [33], and IPSO [34]; and other population-based algorithms such as the CoDE [39], MHDA [40], NaFA [41], CGSA [42], and MEABC [43].
The parameters of IPSO, MPSO, TACPSO and PSO are taken directly from reference [7]. The inertial weight ω of the AGPSO1, AGPSO2 and AGPSO3 algorithms linearly decreases from 0.9 to 0.4. The population sizes for all comparison algorithms are 30, and the maximum number of iterations is 1×103. Note that in this work, since the algorithm structures of IPSO, MPSO, TACPSO and PSO are designed similarly to Algorithm 1 and Algorithm 2, therefore, the maximum fitness evaluation number is 3×104. To obtain a fair comparison of the optimization results of all algorithms, the statistical results are achieved over 30 independent runs for each test problem. Four statistical criteria are used to compare the performance of the algorithms. They are the best value (noted as “Best”), the worst value (noted as “Worst”), the average value (noted as “Mean”), and the standard deviation (noted as “St.dev”). All of the simulation experiments were executed on a machine with the Windows 10 operating system, an Intel(R) Core™ 64×2 Dual-Core processor operating at 2.5 GHz, and 4.00 GB of RAM. The problems are programmed using MATLAB R2015a.
Experimental results analysis
Performance comparison with AGPSO1, AGPSO2 and AGPSO3
To investigate the optimization performance of the RW-AGPSO algorithm for the 23 benchmark functions that are listed in Tables 2 to 4, we compared RW-AGPSO with the AGPSO1, AGPSO2 and AGPSO3 algorithms using 30 independent experiments. Please note that seven unimodal and six multimodal problems with 30 and 1000 dimensions have been chosen to verify the optimization performance of the proposed RW-AGPSO algorithm on low-dimensional and high-dimensional problems. The experimental results are recorded in Tables 5 to 7. Table 5 shows that the RW-AGPSO algorithm achieved better results on seven unimodal problems than AGPSO1 and AGPSO2. RW-AGPSO achieved a better optimization performance than AGPSO3 on seven high-dimensional unimodal problems, but it obtained worse results on one low-dimensional problem (i.e., F6). As seen from Table 6, the optimization performance of the RW-AGPSO algorithm for the six multimodal test functions on both low- and high-dimensional problems is better than those of AGPSO1, AGPSO2 and AGPSO3 on all multimodal problems except for function F8. As shown in Table 7, for the ten fixed-dimension multimodal test problems, AGPSO1, AGPSO2 and AGPSO3 obtained better results than RW-AGPSO on three functions (i.e., F14, F16 and F18), but the RW-AGPSO obtained better results on four functions, including F15, F17, F21 and F23. In addition, the RW-AGPSO algorithm could provide very competitive optimization results compared to AGPSO1, AGPSO2 and AGPSO3 for functions F14, F16, F18, F20, F21 and F22.
Experimental results obtained by the AGPSO1, AGPSO2, AGPSO3 and RW-AGPSO algorithms for seven unimodal test functions
Experimental results obtained by the AGPSO1, AGPSO2, AGPSO3 and RW-AGPSO algorithms for seven unimodal test functions
Experimental results obtained by the AGPSO1, AGPSO2, AGPSO3 and RW-AGPSO algorithms for six multimodal test functions
Experimental results obtained by the AGPSO1, AGPSO2, AGPSO3 and RW-AGPSO algorithms for ten fixed-dimension multimodal test functions
To investigate the stability of the algorithms on low- and high-dimensional problems, convergence curves of the mean fitness values obtained by RW-AGPSO, AGPSO1, AGPSO2 and AGPSO3 for optimization of 5 unimodal test functions (F1, F2, F4, F5 and F7) and 5 multimodal test functions (F9-F13) are plotted in Figs. 2 and 3 on dimensions of 30 and 1000, respectively. As seen from Figs. 2 and 3, the proposed RW-AGPSO shows faster convergence speed than the AGPSO1, AGPSO2 and AGPSO3 algorithms on all 10 applied test functions with low dimension and high dimension cases. In addition, Fig. 4 plots the convergence curves of 10 fixed-dimension multimodal test functions. From this figure, the RW-AGPSO algorithm shows faster and similar convergence rates on 2 test functions (F15 and F23) and 6 test functions (F14 and F16-F20). However, for function F21, AGPSO2 shows the fastest convergence speed and RW-AGPSO shows the second fastest; for functions F22, AGPSO3 shows the fastest convergence speed and RW-AGPSO shows the third fastest.
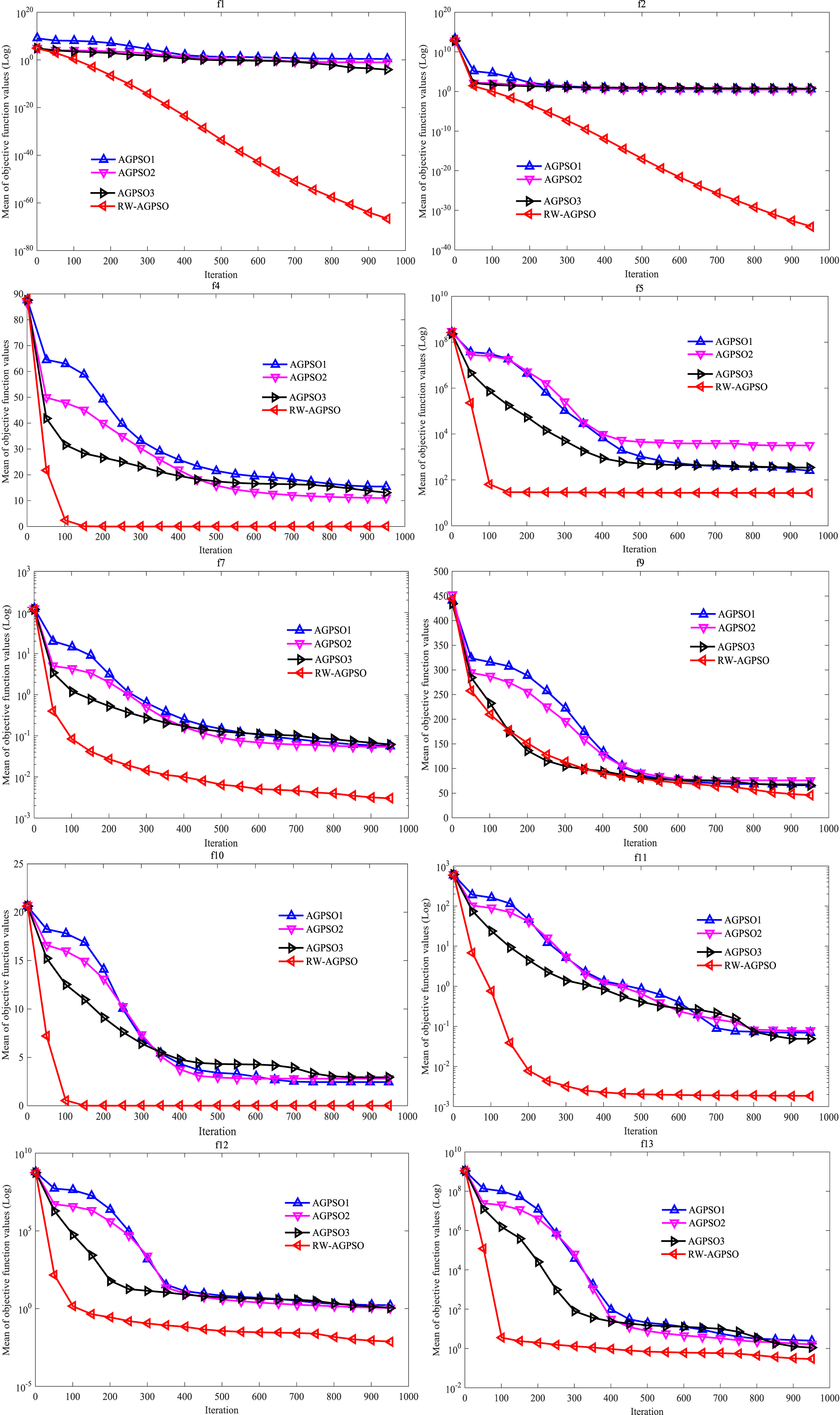
Convergence speed of RW-AGPSO and other AGPSO variants with dimension is 30.
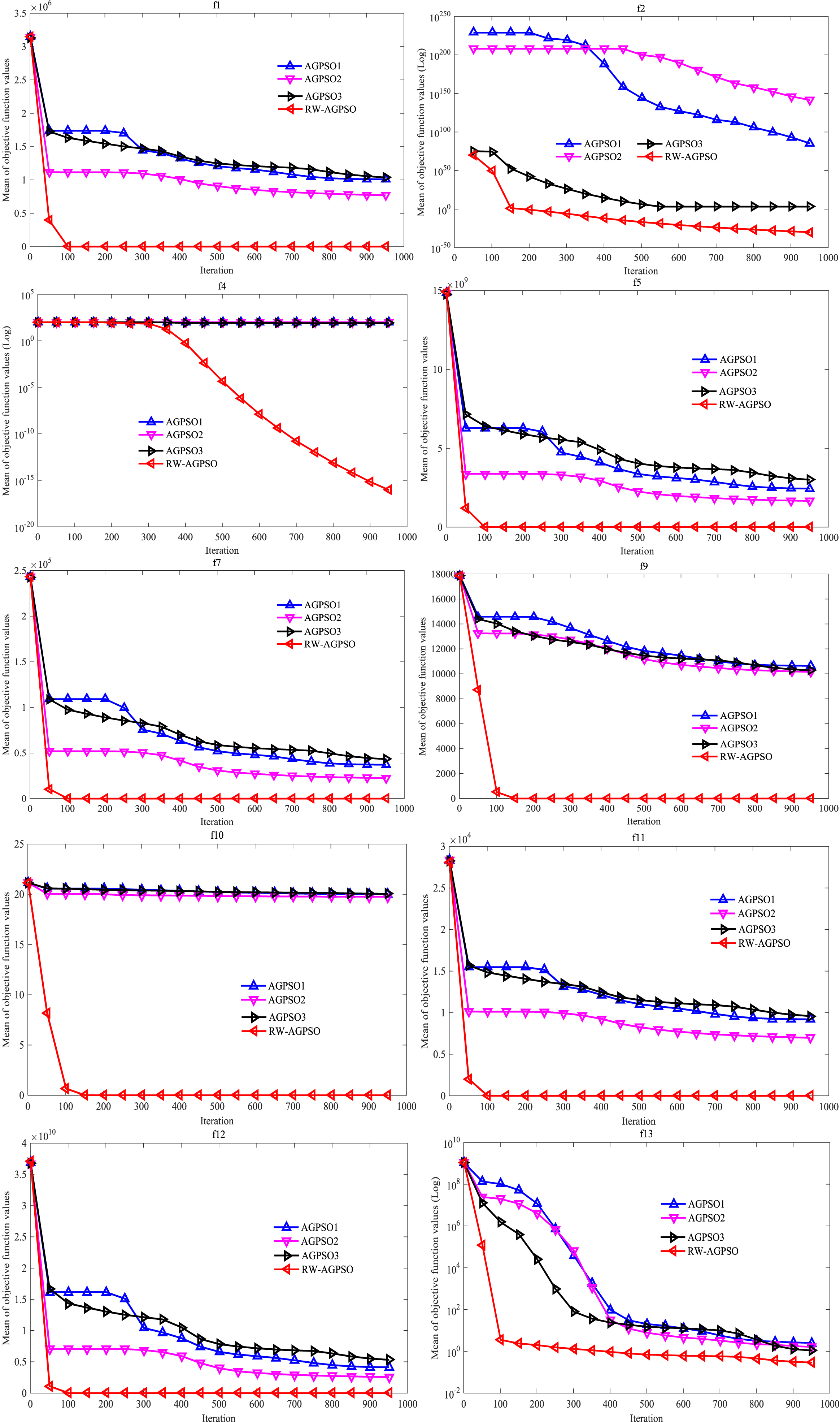
Convergence speed of RW-AGPSO and other AGPSO variants with dimension is 1000.
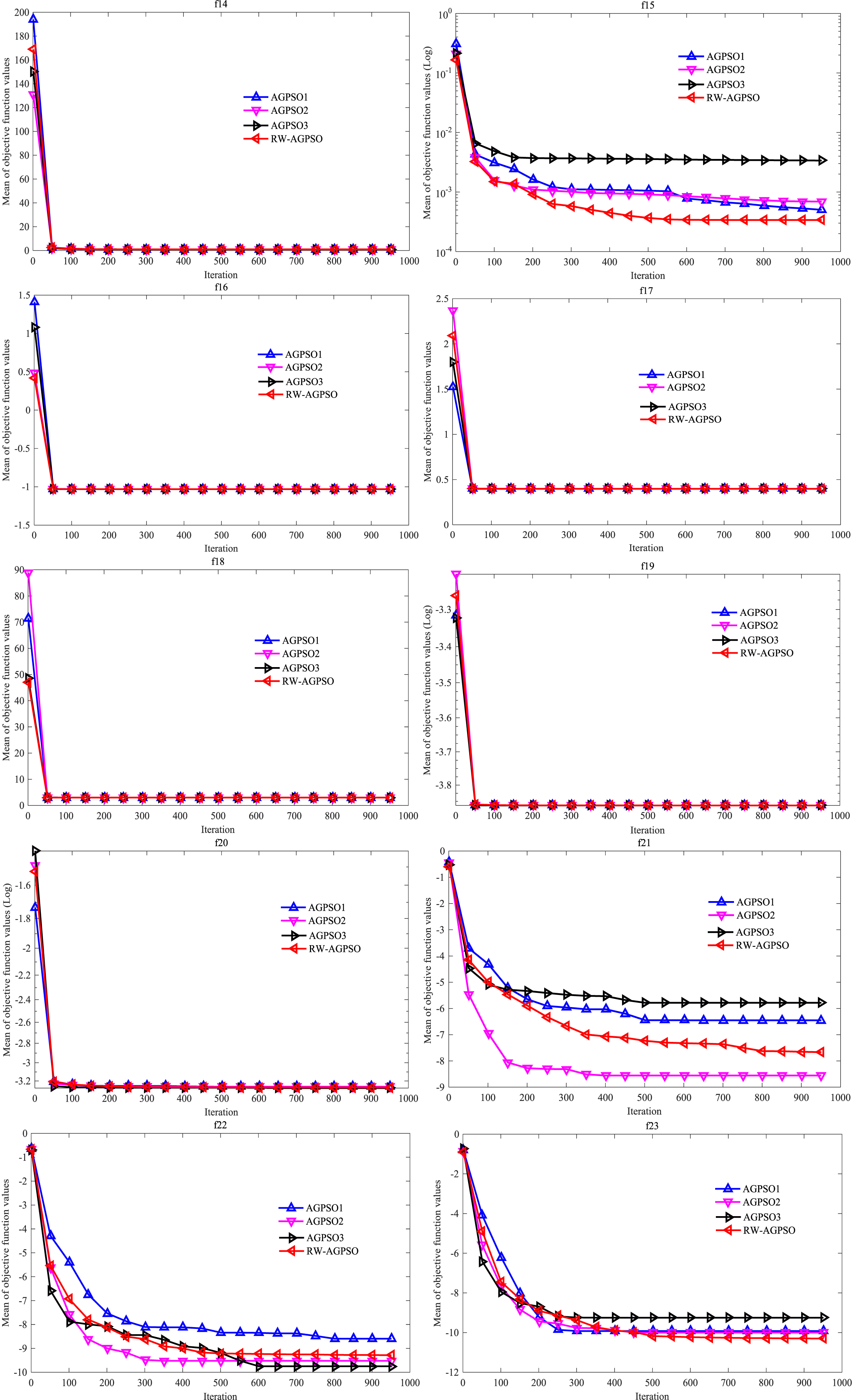
Convergence speed of RW-AGPSO and other AGPSO variants for 10 fixed-dimension multimodal test functions.
To compare performance from a statistical perspective, Table 8 records the results of the Wilcoxon rank-sum test with a significance level of 0.05. From this table, RW-AGPSO gave better results in 28 cases out of 36, 27 out of 36 and 25 out of 36 compared to the AGPSO1, AGPSO2 and AGPSO3 algorithms, respectively.
In this subsection, we investigate the optimization performance of the proposed RW-AGPSO algorithm and other modified PSO variants such as TACPSO [30], MPSO [33], IPSO [34], and PSO [2, 9] on low (D = 30) and high (D = 1000) dimensional optimization problems. All of the comparison results are recorded in Tables 9 to 11. According to Table 9, for the seven unimodal test problems, the RW-AGPSO algorithm obtained the best results on all the high-dimensional problems and achieved the best optimization performance over TACPSO, MPSO and PSO on all of the low-dimensional problems. IPSO obtained better results than RW-AGPSO on one function (i.e., F6) for the low-dimensional case. As shown by the optimization results of the six multimodal test problems that are shown in Table 10, the RW-AGPSO algorithm obtained better optimization results than the IPSO algorithm on all low- and high-dimensional multimodal problems (i.e., F9 to F13) except for function F8.
Summarized Wilcoxon rank-sum test (significance level is 0.05) comparisons between the RW-AGPSO and three AGPSO variants
Summarized Wilcoxon rank-sum test (significance level is 0.05) comparisons between the RW-AGPSO and three AGPSO variants
Experimental results obtained by the IPSO, MPSO, TACPSO, PSO and RW-AGPSO algorithms for seven unimodal test functions
Experimental results obtained by the IPSO, MPSO, TACPSO, PSO and RW-AGPSO algorithms for six multimodal test functions
Experimental results obtained by the IPSO, MPSO, TACPSO, PSO and RW-AGPSO algorithms for ten fixed-dimension multimodal test functions
Furthermore, the RW-AGPSO algorithm obtained the best optimization performance when compared to MPSO, TACPSO and PSO on six multimodal problems for both the low- and high-dimensional cases. As shown in Table 11, the RW-AGPSO algorithm obtained better results than IPSO, MPSO, TACPSO and PSO on five fixed-dimension multimodal test functions (i.e., F15 and F20-F23). In addition, the RW-AGPSO algorithm achieved competitive optimization results on functions F15 F16, F17 and F19 when compared to IPSO, MPSO and TACPSO. IPSO, MPSO, TACPSO and PSO obtained the best and almost the same results on functions F16, F17, F18 and F19. For function F14, IPSO and MPSO achieved the same and the best results, TACPSO obtained the second-best results, followed by RW-AGPSO, and PSO achieved the worst optimization performance on this function.
Furthermore, the evolution graphs of the average function fitness values of the five PSO variants in 5 representative unimodal test functions (F1, F3-F5 and F7) and 5 classical multimodal test problems (F9-F13) are shown in Figs. 5 to 6, and the evolution curves in 10 typical fixed-dimension multimodal test functions are plotted in Fig. 7. As seen from Figs. 5 and 6, RW-AGPSO shows a faster convergence speed than the other four PSO algorithms for the selected representative test functions. From Fig. 7, RW-AGPSO was faster than the other methods for function F15 and showed almost similar convergence speeds to the other four algorithms on 6 test functions (F16-F20 and F23). However, for function F21, RW-AGPSO was slower than PSO and TACPSO but faster than MPSO; for functions F22, RW-AGPSO was faster than MPSO and TACPSO but slower than PSO and IPSO. In addition, for function F14, RW-AGPSO shows a similar convergence speed to IPSO, MPSO and TACPSO, but was faster than PSO.
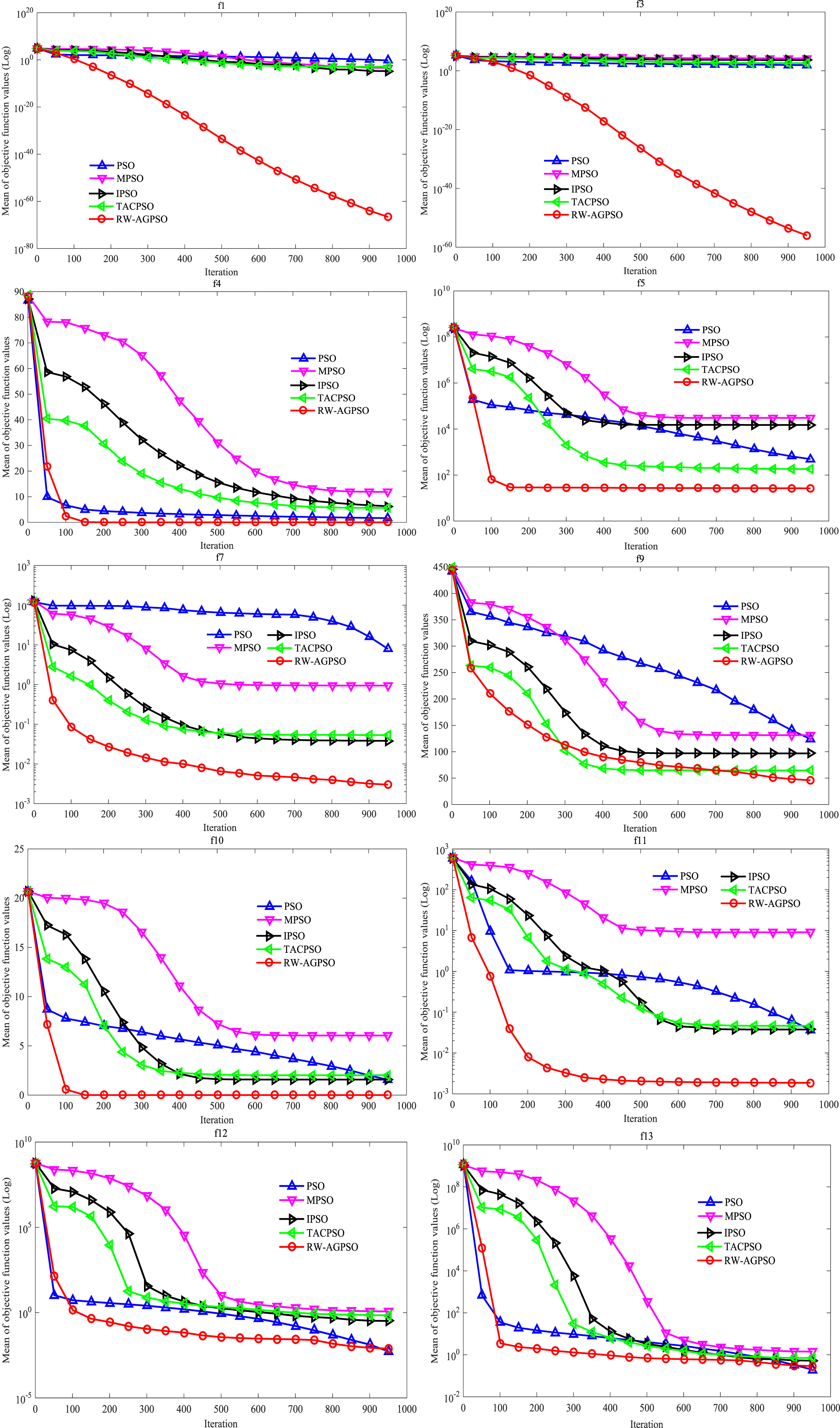
Convergence speed of RW-AGPSO and other PSO variants with dimension is 30.
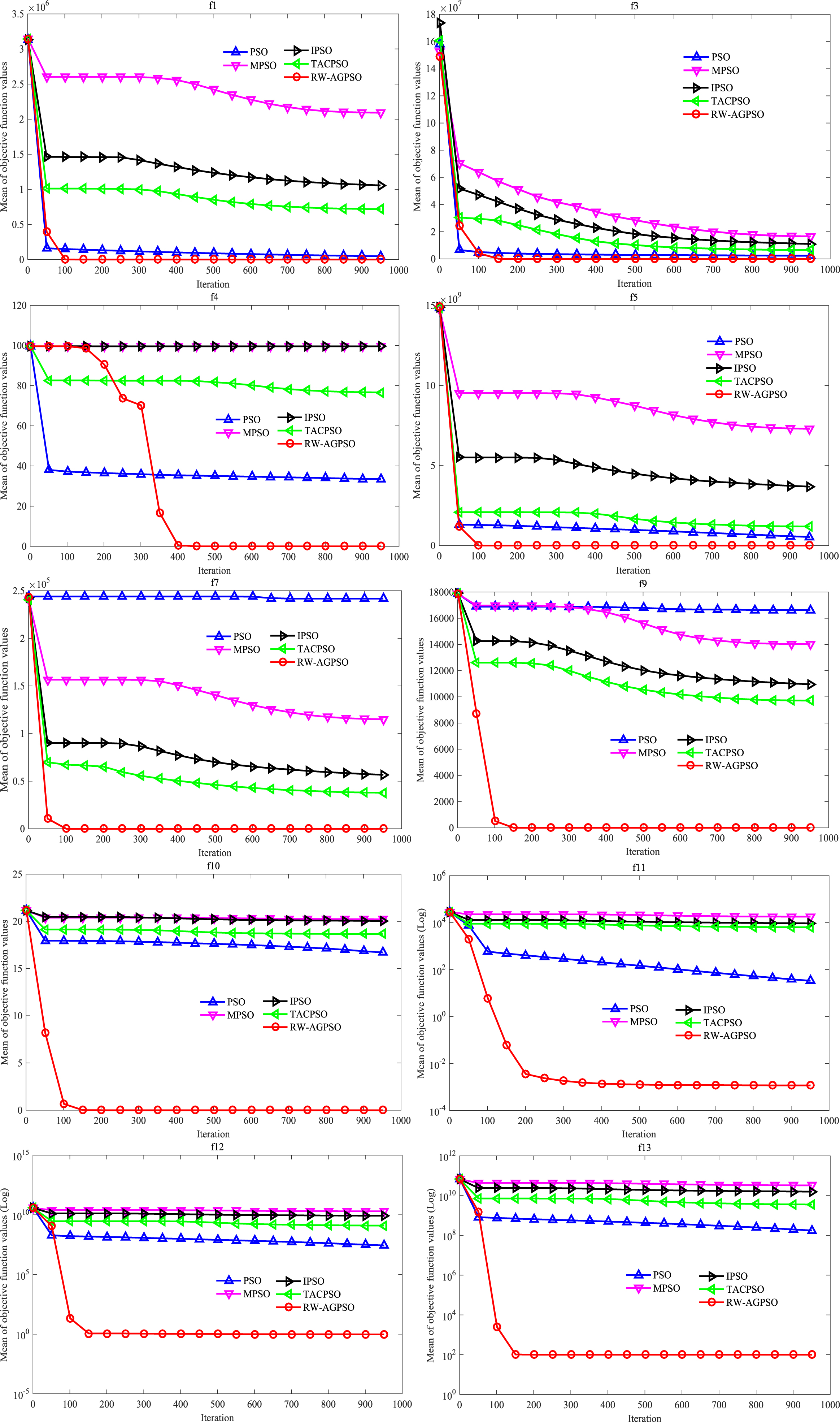
Convergence speed of RW-AGPSO and other PSO variants with dimension is 1000.
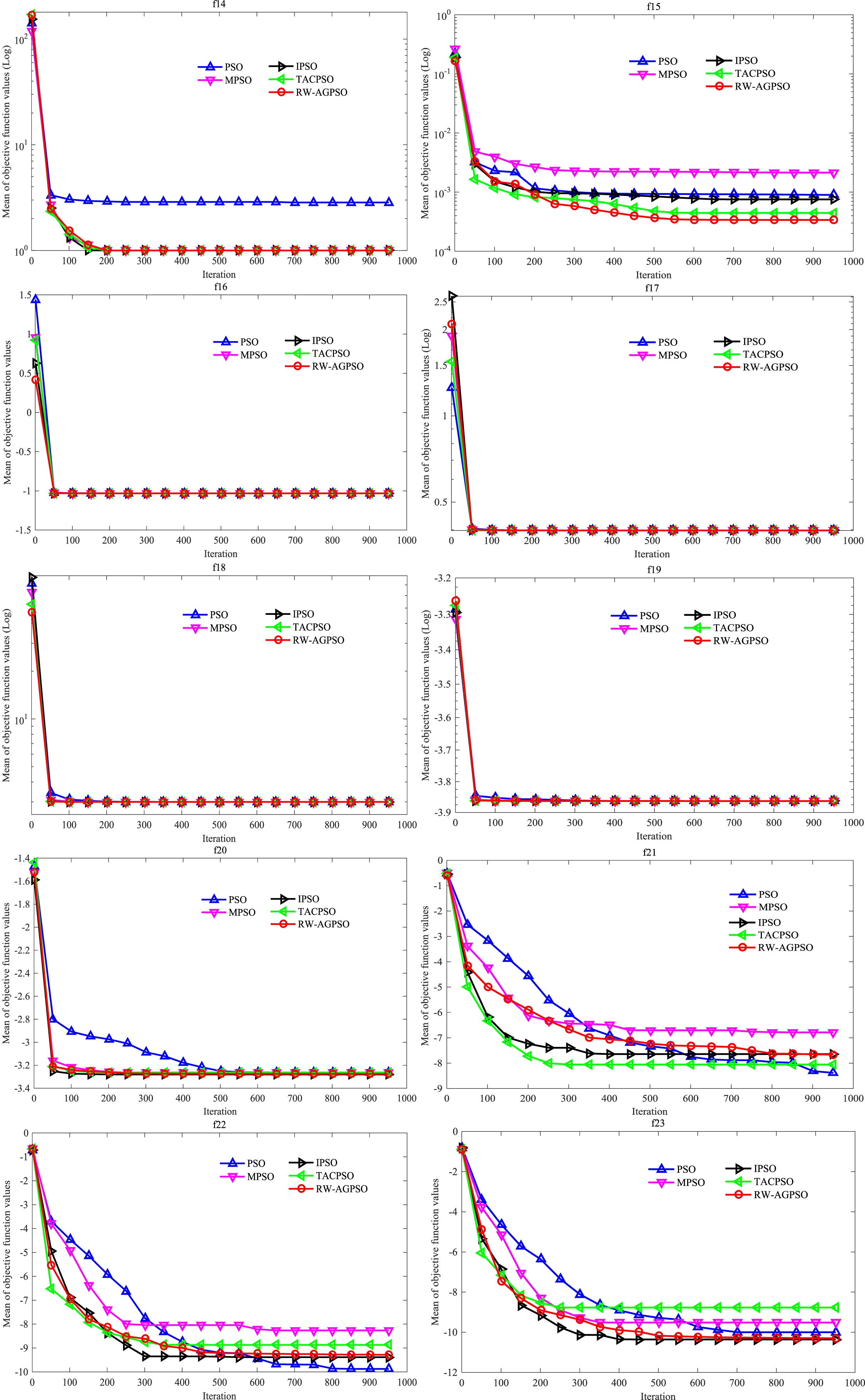
Convergence speed of RW-AGPSO and other PSO variants for 10 fixed-dimension multimodal test functions.
To clearly compare performance from a statistical perspective, Table 12 lists the results of the Wilcoxon rank-sum test with a significance level of 0.05. As seen from this table, RW-AGPSO gave better results in 25 cases out of 36, 25 out of 36, 28 out of 36 and 27 out of 36 compared to the IPSO, MPSO, TACPSO and PSO algorithms, respectively.
To compare the optimization performance of the proposed RW-AGPSO algorithm and other recently proposed algorithms such as composite differential evolution (CoDE) [39], the memory-based hybrid dragonfly algorithm (MHDA) [40], the firefly algorithm with neighborhood attraction (NaFA) [41], the chaotic gravitational search algorithm (CGSA) [42], and the multistrategy ensemble artificial bee colony (MEABC) [43], nine classical functions were selected as the benchmark test problems to conduct a series of independent experiments. Each experiment was run 30 times, the dimension of each classical benchmark test problem was set as 30, and the maximum number of iterations was set to 500 (note that the maximum number of objective function evaluations is set as 1.5×104 is to keep the same as it set in the original paper of the selected algorithms). The parameters of the selected comparison algorithms are taken directly from their original papers. All the experimental results are listed in Table 13, where “Mean” and “St.dev” denote the mean and the standard deviation of the fitness of the benchmark problem, respectively.
The results in Table 13 show that the MEABC algorithm achieved the theoretical global optima values on 2 functions (i.e., F9 and F11), and the NaFA algorithm achieved the theoretical global optima value on function F11. The RW-AGPSO algorithm performed far better than the CoDE, MHDA, NaFA, CGSA and MEABC on 4 functions (i.e., F1, F2, F3, and F4). The MHDA algorithm obtained the best results on 3 functions (i.e., F5, F7 and F10). On function F5, the optimization performance of RW-AGPSO was worse than those of MHDA, CoDE and NaFA, but better than those of the CGSA and MEABC. RW-AGPSO provided very competitive optimization results on function F7 compared to the MHDA, and it was better than four other algorithms. On function F10, RW-AGPSO achieved very close results to the MHDA, similar to the results of the NaFA and the MEABC, and was better than those of the CoDE and the CGSA.
To further assess the performance of the RW-AGPSO algorithm for solving complex problems, the CEC’14 test suite, which contains several high complexity test functions, was selected for the simulation experiment. Here, we compared the RW-AGPSO to four population-based optimization algorithms, TACPSO, IPSO, GWO and the dynamically dimensioned search grey wolf optimizer (DGWO) [35]. In this experiment, the common algorithm parameters, such as the population size, the dimension of problems, and the maximum number of iterations were set as 30, 30 and 5000, respectively. The other parameters of TACPSO, IPSO, GWO and DGWO were the same as in Ref. [36]. The number of objective function evaluations for RW-AGPSO, TACPSO, IPSO, GWO and DGWO was 1.5×105. The experimental results and the Wilcoxon rank- sum test (significance level is 0.05) results obtained after 20 independent runs are shown in Table 14.
Summarized Wilcoxon rank-sum test (significance level is 0.05) comparisons between the RW-AGPSO and the IPSO, the MPSO, the TACPSO and the PSO
Summarized Wilcoxon rank-sum test (significance level is 0.05) comparisons between the RW-AGPSO and the IPSO, the MPSO, the TACPSO and the PSO
Experimental results obtained by five other state-of-the-art algorithms and the RW-AGPSO algorithms for nine typical benchmark functions (D = 30)
Statistical results obtained by the four selected algorithms and the RW-AGPSO algorithms for the CEC’14 test suite (D = 30)
As seen from Table 14, the RW-AGPSO provided better results in 21 cases out of 30, 17 out of 30, 14 out of 30 and 10 out of 30, compared to the TACPSO, the IPSO, the GWO and the DGWO algorithms, respectively. From this analysis, we can conclude that the RW-AGPSO algorithm could also obtain relatively better results on high complexity problems.
To investigate the effect of the proportion between the population size and problem dimension on the performance of the RW-AGPSO algorithm, three different sets of parameter values of the population size and problem dimension are set to 10, 30, and 100, 300 and 1000, and 3000, respectively. The 13 test functions in Tables 2 and 3 are selected as the benchmark problems. In these three sets of experiments, each test problem is independently run 30 times, and the number of function evaluations is set to 60000. The experimental results are reported in Table 15, where “N” indicates the population size and “D” represents the dimension.
Statistical results obtained by RW-AGPSO algorithms on 13 classical test functions
Statistical results obtained by RW-AGPSO algorithms on 13 classical test functions
From this table, we can observe that for functions F7 and F11, the optimization performance is almost the same as the population size increases in proportion to the function dimension. However, for functions F1–F6, F8–F100 and F12-F13, the optimization performance weakened as the population size and function dimension increased proportionally. From this analysis, we can conclude that when the population size of the algorithm increases in proportion to the dimension of the function, its optimization performance does decrease in most cases.
In addition, to verify the effect of the proportionality between the population size and problem dimension on the performance of fixed-dimension multimodal benchmark functions, the population size N is set to N = D, 2*D and 4*D. In this experiment, the parameters are set the same as in the above experiment. The experimental results are presented in Table 16. From this table, we can see that for function F14, the optimization performance increases as the population size and function dimension increases proportionally. For functions F16-F19, the optimization performance is almost the same as the population size increases in proportion to the function dimension, while for the remaining functions, the optimization performance increases first and then decreases as the population size increases proportionally to the function dimension. From the above analysis, we can conclude that when the population size of the algorithm increases in proportion to the dimension of the function, its optimization performance does not strictly remain unchanged, increase or decrease.
Statistical results obtained by RW-AGPSO algorithms on 10 fixed-dimension multimodal test functions.
To investigate the performance of the proposed RW-AGPSO on constrained real-world engineering problems, three constrained engineering optimization problems (i.e., gear train design problem, pressure vessel design problem and welded beam design problem) were selected as the research objects, and their detailed information was introduced in Ref. [44]. For constrained optimization, penalty function methods were introduced [45]. In addition, the parameters were set as follows: the population size was 50, the maximum number of iterations was 10000, and each problem was run independently 30 times.
For the gear train design problem, Table 17 listes the solutions solved by researchers [44, 46–48], and their statistical results are reported in Table 18. As seen from Table 17, the proposed RW-AGPSO obtained the best results. From Table 18, for the best solution of the gear train design problem, RW-AGPSO has the same value as Garg [44] and is better than other approaches. For the mean cost, the result of RW-AGPSO is close to that of Yan [46] and is better than other that of methods. In terms of the worst results and the standard deviation results of the cost, the proposed method achieved the second best results.
The best solution for the gear train design problem found by different techniques
The best solution for the gear train design problem found by different techniques
The statistical results for the gear train design problem found by different techniques
The second real-word constrained optimization problem that was chosen as the test problem is the pressure vessel design problem. From Table 19, it can be seen that the proposed RW-AGPSO obtained the best cost result and is better than other algorithms. The statistical results of different methods for pressure vessels are recorded in Table 20. From this table, RW-AGPSO achieved the best results in terms of the best and mean cost, as well as the third best standard deviation value of the cost.
The best solution for the pressure vessel design problem found by different techniques
The statistical results for the pressure vessel design problem found by different techniques
The welded beam design problem is the third constrained optimization problem used to verify the effectiveness of the proposed algorithm. The best results obtained by RW-AGPSO and other methods are listed in Table 21, and their statistical results can be found in Table 22. As seen in Table 21, RW-AGPSO obtained the smallest cost value and is better than the other comparison algorithms. From Table 22, RW-AGPSO achieved the best cost results on two indicators (i.e., best and mean) and the second best cost values in terms of worst and standard deviation value of the cost.
The best solution for welded beam design problem found by different techniques
The statistical results for welded beam design problem found by different techniques
Based on the above three classical constrained optimization results, we can conclude that the proposed method is effective for solving constrained optimization problems.
In this study, random walks based on Levy flights and dynamically changing weights were embedded into the AGPSO algorithm to form the RW-AGPSO algorithm. The RW-AGPSO algorithm can simultaneously enhance the ability to converge to the global optimum, balance exploration and exploitation; and, consequently, enhance the AGPSO algorithm’s solution accuracy. First, RW-AGPSO is compared with three standard AGPSO variants (i.e., AGPSO1, AGPSO2 and AGPSO3). Seven unimodal and 6 multimodal test functions with dimensions of 30 and 1000, and 10 fixed-dimension multimodal test functions are used to conduct several experiments. The experimental results prove that the RW-AGPSO technique combined with the random walk and dynamically changing weight strategies is effective, and regardless of whether it is solving unimodal or multimodal problems, the optimization performance of RW-AGPSO is better than those of the three AGPSO variants in most cases. Second, RW-AGPSO is compared with four other well-known PSO methods. The optimization results show that the RW-AGPSO method achieved better results in almost all low- and high-dimensional unimodal and multimodal benchmark functions and acquired a very competitive fixed-dimension multimodal test performance compared to IPSO, MPSO, TACPSO, and PSO. Finally, to further reveal the optimization performance of the RW-AGPSO approach, it is compared with other recently proposed algorithms. The results show that the RW-AGPSO method outperforms other recent proposed algorithms for most of the classical test functions. In short, the proposed RW-AGPSO algorithm is successful, and it can be applied to other more complex optimization problems. In addition, the RW-AGPSO algorithm has also shown a promising performance for the CEC’14 test suite. However, several experimental results have also revealed its limitations. As the ratio of dimension to population increases, its performance will deteriorate. For large-scale complex problems, its performance is not satisfactory.
In future work, the RW-AGPSO algorithm will be applied to real-world engineering design problems, image segmentation, artificial intelligence, training neural networks, economic load dispatch, pattern recognition, etc. The random walk that based on Levy flights and the dynamically changing weight method will be embedded in other methods to obtain an improved performance.
Footnotes
Acknowledgments
The Youth Foundation of Philosophy and Social Science Research Planning of Heilongjiang Province (grant number 18JYC257).