
Abstract
The precise motion control of a hydraulic motor system has some problems due to uncertain disturbance, complex nonlinear dynamics. Traditional methods are difficult to obtain the desired control performance. In this paper, a new fuzzy neural network (FNN) combined with terminal sling mode control (TSMC) and time delay estimation (TDE) is proposed. FNN is used to adjust the parameter of TSMC to reduce the time for the system to reach the equilibrium point and chatting. To increase the accuracy of the system, TDE is used to compensate the error caused by uncertain disturbance. This controller was simulated in Amesim and Simulink, and the results showed that the control scheme proposed in this paper has the smallest angular displacement error, angular velocity error and variance than other control schemes, such as PID and sliding mode control (SMC). Furthermore, the designed controller was implemented on a drill pipe automatic handling manipulator, and its control performance was verified.
Keywords
Introduction
In recent years, hydraulic systems have been increasingly popular and widely used in various industries due to the advantages of large torque output, reliability, durability, and low price [1]. Hydraulic motor system is a typical hydraulic system, and usually applied in hydraulic excavator, aircraft actuator, high performance rotational testing equipment, mining equipment, and so on [2, 3]. However, the precise motion control of hydraulic motor system is a highly challenging task in the development of an autonomous hydraulic system because of nonlinear behaviors and modeling uncertainties, including nonlinear friction, leakage and compressibility of hydraulic oil, and matched or mismatched disturbance [4]. What’s more, the friction force can reach 30% of the hydraulic actuator torque in some conditions [5].
To solve these problems, many efforts have been made and many control schemes for hydraulic systems have been proposed [6]. The PID control schemes and its related compensation methods based on the classical control theory are recognized as the most common method in engineering application, but the control performance hardly meets the requirements [7]. Based on the modern control theory, such as adaptive control [8], robust control [9], nonlinear motion control [10], optimal control [11], failure-tolerant control [12], and SMC, etc. Among them, SMC is an effective method for nonlinear and uncertain systems because of its strong robustness, and rapid responses [7]. Liang et al. proposed a nonsingular fast terminal SMC, which is implemented as the nonlinear desire error dynamic to ensure fast convergence and high trajectory tracking accuracy [14]. To deal with the nonlinear friction problem, designing an appropriate compensation scheme is a common solution, such as, a model-based compensation method combined with an observer-based adaptive SMC is proposed for a system [15], and simulation results are illustrated that the SMC scheme can achieve better control performance than PID scheme. However, when the state trajectory reaches the sliding surface, it will pass back and forth on both sides of the surface, increasing chatting of the system [17]. To reduce system chatting, Zhang et al. designed an adaptive reaching law sliding mode controller, which is combined an adaptive law with an adaptive controller to improve dynamic performance [16].
As mentioned, the dynamic behavior of hydraulic systems is characterized by various nonlinearities. Thus, it can be inferred that nonlinear control schemes are a necessity to achieve high-performance control. Indeed, Bonchis et al. studied ten different control schemes with hydraulic manipulators and demonstrated that all nonlinear schemes delivered better performance than the linear schemes [29]. For the SMC, as an alternative, nonlinear sliding surface have been adopted as the nonlinear desired error dynamics of time delay control, in place of the commonly used linear dynamics, and have been show promising results [30].
The aforementioned schemes are the ones based on system dynamics model, but the hydraulic system is strongly nonlinear and highly complicated, especially for hydraulic motor system. To alleviate the need of a hydraulic system dynamics mode, intelligent control techniques have been developed and applied, as a model-free control, by obtaining “black box” models of hydraulic system dynamics [18, 19]. However, intelligent control techniques require complex parameter-turning algorithms or numerous parameters, and it is difficult to apply in engineer field [21]. To solve the existing problem, many scholars combine intelligent control techniques and modern control theory together. An adaptive neural network-based synchronized control is utilized to reduce position and velocity errors [22, 23], a fuzzy SMC is proposed and the fuzzy logic system is utilized to adjust the control gain of the SMC [20], and a fuzzy terminal SMC is utilized to reduce the chatting problem [7].
Overall, many controllers have been proposed and investigated. However, some of the aforementioned controllers have some disadvantages or scope of application. For example, some controllers are difficult to achieve the desired control accuracy. The PID control scheme based on classical control theory is a widely used linear control scheme, but the hydraulic motor system studied in this paper contains strong nonlinearity [7]. Some controllers are not suitable for hydraulic motor systems. The control scheme based on modern control theory needs to establish an accurate mathematical model, but the hydraulic motor system has a strong uncertainty. It is very difficult or even impossible to establish an accurate model [4]. Some controllers are not suitable for the drill pipe automatic handling manipulator. The drill pipe automatic handling manipulator is used in geological drilling. Its working environment is very adverse, with a lot of dust, strong vibration, and even extreme temperature and pressure. This requires the controller to have strong adaptability and robustness. Because intelligent control requires complex parameter-turning algorithms and calculations [21], a single intelligent controller is not suitable for the control of automatic drill pipe handling manipulators.
Therefore, a new controller is proposed in this paper for hydraulic motor system to increase the control performance. The proposed controller consists of fuzzy neural network (FNN), terminal sliding mode control (TSMC), and new time delay estimation (TDE). With this controller, FNN is used to adjust the parameter of the approach law of TSMC, and cooperate with the nonlinear sliding surface to ameliorate the chatting problem and provide fast convergence of the hydraulic motor system. Furthermore, to get higher control accuracy, the TDE is used to compensate for model parameter errors and disturbance. The benefit of this controller is that does not require external uncertainly disturbance and nonlinear friction information of system, which makes it more suitable for practical applications.
In this case, it can be predicted that the controller proposed in this paper will improve the control accuracy of the hydraulic motor system, thereby increasing the work performance of the drill pipe automatic handling manipulator when moving drill pipe to the wellhead and docking with the main shaft of drilling rig. In the end, this paper will verify the correctness of the hypothesis through simulations and tests.
This paper is organized as follows. The state equation of the hydraulic motor system is analysis in section 2. Section 3 introduces a new time delay estimation, a terminal sliding surface, and fuzzy neural network used in the controller. The performance of the controller is verified by simulations and tests in section 4 and Section 5, respectively. Finally, brief conclusions are made in section 6.
System description and state equation
The controller is designed and implemented based on the hydraulic turnover mechanism of a drill pipe automatic handling manipulator, as show in Fig. 1. The turnover mechanism is driven by an electromagnetic-proportional-valve controlled cycloid hydraulic motor, which structure is presented in the Fig. 2. Flow chart of the controller is depicted using Fig. 3. The control goal is to have the output angle displacement and angular velocity track the ideal trajectory as closely as possible.

Structure diagram of turnover mechanism.
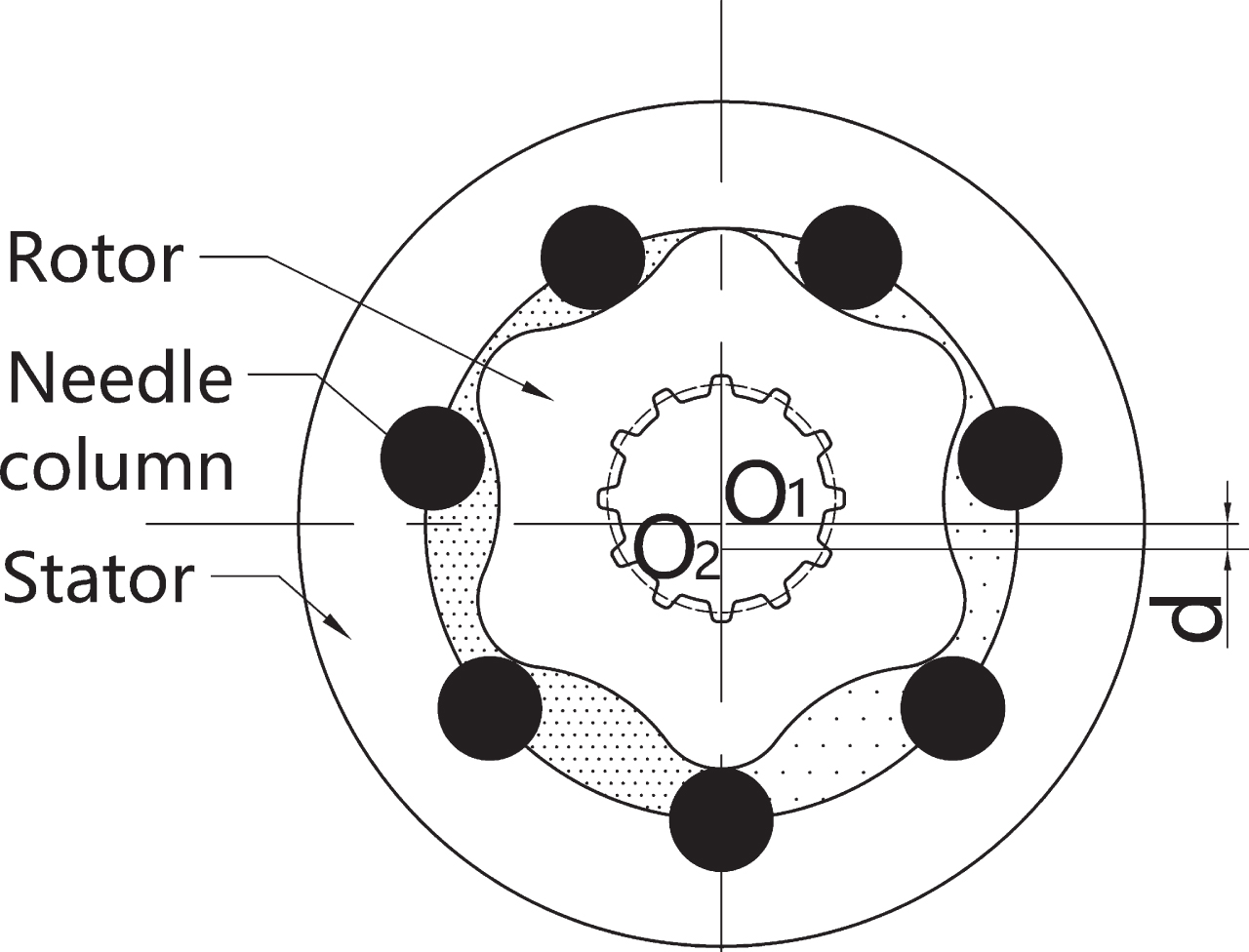
Structure diagram of cycloid hydraulic motor.
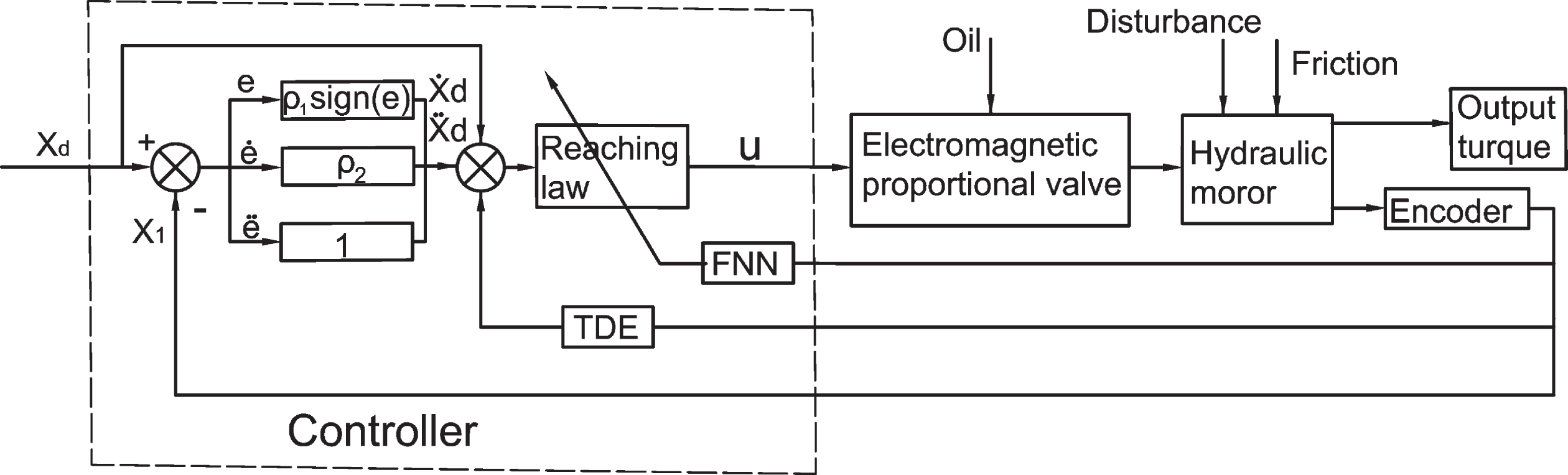
Flow chart of the controller.
Using the energy conservation law and the second Newton’s law of hydraulic system, the dynamics of a hydraulic motor system can be described by the following equation [24]:
By changing the displacement of the electromagnetic-proportional-valve spool, the volume of oil flowing into the hydraulic motor is controlled, thereby controlling the rotation speed of the motor. Assume there is no external leakage, the flow though the valve can be calculated as [26]:
Therefore, Equation (2) can be written as
Based on the continuity equation of hydraulic motor system and law of conservation of mass, the relationship between pressure, flow and volume of the system can be written as [27]:
For the hydraulic motor system studied in this paper, the total flow ∑
i
q
i
includes controlled flow Q
f
, motion flow Q
M
, and internal leakage flow Q
d
. The motion flow Q
M
can be calculated as [25]:
The internal leakage is more complicated than traditional linear hydraulic cylinder. The internal leakage flow Q
d
can be considered as a linear function related to P
L
and an uncertain value ΔQ
d
as follows [28]:
where
The state vector of the hydraulic motor system can be defined as:
Combining Equations (1)–(9), the state-space of the hydraulic motor system can be presented as follows:
In such a system, with the desired smooth motion trajectory x d (t), the control objective is that the output y = x1 tracks x d (t) as closely as possible in the presence of various modeling uncertainties [3]. Besides, the size of the disturbance T d and d in the system is considered to be bounded.
To achieve a high accuracy motion tracking, a TSMC scheme combines FNN and TDE is proposed in this paper. The special structure of controller is depicted in Fig. 2.
Design of TSMC
The design of sliding control often depends on tracking error. Hence, tracking error is defined as follows:
Based on the traditional SMC, a linear sliding surface s is written as follows:
Parameter c1, and c2 should satisfy that the polynomial p2 + c2p + c1 is Hurwitz, and p is the Laplace operator [17]. In previous studies, it was found that the nonlinear sliding surface can achieve high-performance control and provide fast convergence of the hydraulic motor system. Therefore, a nonlinear sliding surface s is proposed as follows:
Next, Lyapunov stability function is designed as follows:
The derivation of V (s) is shown as follows:
In order to ensure the stability of the hydraulic motor system, the controller signal u can be designed as follows:
In the Equation (16), the size of d is unknown. In order to get higher control accuracy, a new TDE is used to estimate the total disturbances d in the following section. ɛ is the gain of the TSMC. If ɛ is too large, it will increase the chatting of the system, and too small will increase the time for the system to reach equilibrium point. Therefore, the value of ɛ will directly affect the control performance of the system. Thus, the FNN will be used to adjust the gain adaptively in the following.
Generally speaking, the value of total disturbance d in the Equation (16) at time t may be almost same as at time t - L when the L is small enough, and the commonly used TDE can be written as [2]
With the Equations (19), (16) can be rewritten as follows:
Compared with the TDE of Equations (17), (20) can improve the accuracy of disturbances compensation, especially when the rate of change of d is relatively large, thereby improving the performance of motion controller.
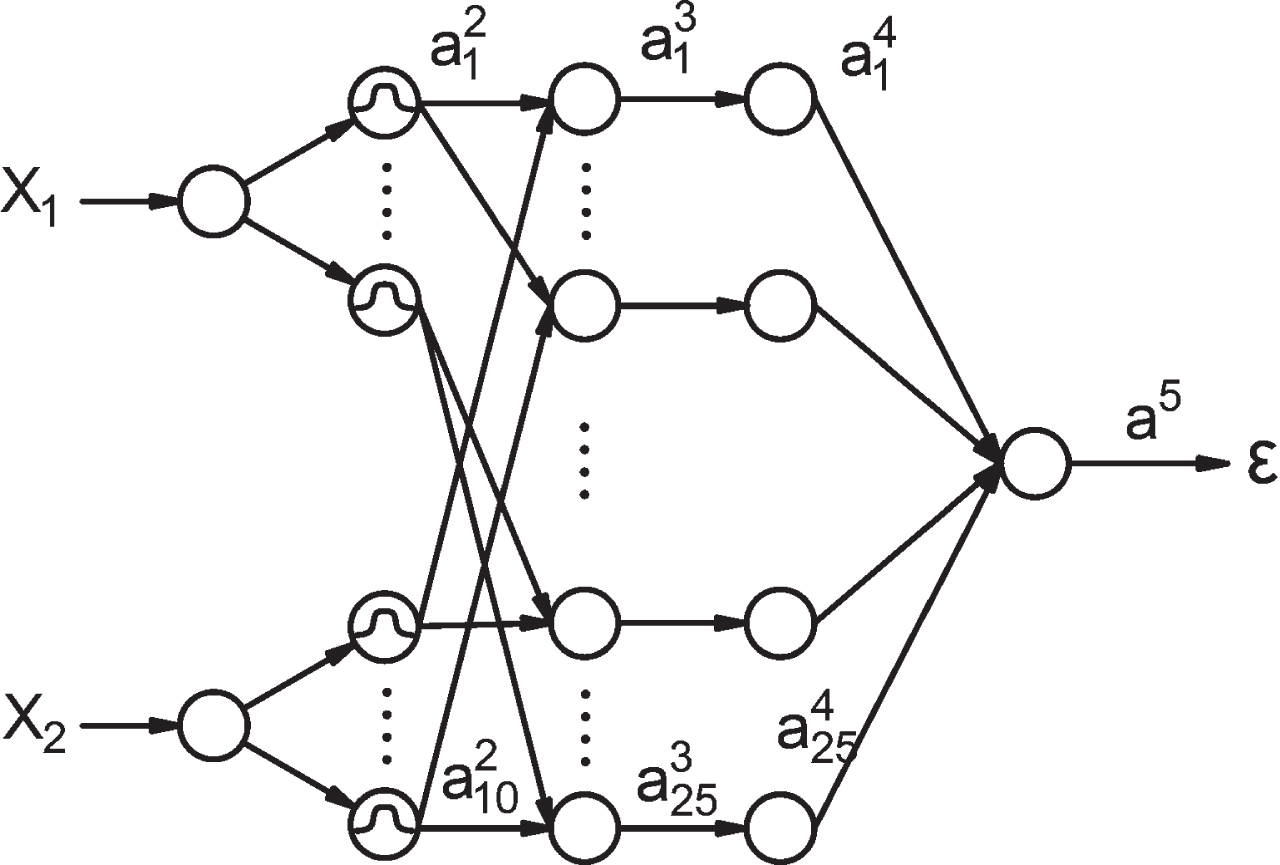
Fuzzy logic and neural network are two typical and frequently used artificial intelligent algorithms. Both of them have their advantages and disadvantages. The fuzzy logic exhibits excellent control performance for uncertain systems, but the fuzzy rules are dependent on expert experience and cannot be automatically generator or adjusted when the environment changes, which has a significant impact on the control performance. Neural network has excellent ability of nonlinear mapping and self-learning. However, neural network cannot process language variables and pre-add expert experience into the system, and local convergence will occur. The combination of fuzzy logic and neural network would be complementary each other [31]. The specific solution is to use the neural network learning ability to optimize fuzzy rules and corresponding membership functions, and pre-add some expert experience to the neural network. This paper adopts fuzzy neural network TSMC controller, as shown in Fig. 4. The input signals x1 and x2 of this controller are the
Control model of fuzzy neural network.
The FNN used in the controller have five layers as follows [32]: The first layer is the input layer. The fuzzy input vector goes to the nodes of this layer, and they are passed to next layer directly. Input The second layer is the membership function generation layer by using Gaussian membership function. The input signals are converted to five fuzzy language variables, which are positive big (PB), positive small (PS), zero (ZE), negative small (NS), and negative big (NB). Input The third layer is the fuzzy reasoning layer. There are twenty-five rules in this system. Input
The fourth layer is reserved, and the purpose is when the fuzzy logic rules change or the environment changes greatly, the controller can still be applied with a slight change. So, the fourth layer is like the first layer, Input The fifth layer is the output layer. The function of this layer is the defuzzification to obtain the gain
The weight coefficient
Otherwise, q k = 0.
Therefore, the controller u in the Equation (16) can be rewritten as:
where
As shown in Equation (32), the controller proposed in this paper does not require the disturbance information and accurate dynamic model of the system, which makes it more suitable for practical applications. In the controller, a nonlinear sliding surface is proposed, which makes the system error approach zero in a finite time. A new TDE is used to compensate for the error caused by the disturbance of the system. In addition, FNN is used to adjust the parameter of TSMC, which reduces the chatting and reduces the time of system to reach the sliding mode surface.
In order to validate the designed controller, a simulation combining MATLAB/Simulink and Amesim was performed before the practical device is built. The models built in Simulink and Amesim are shown as Figs. 5 and 6, respectively.
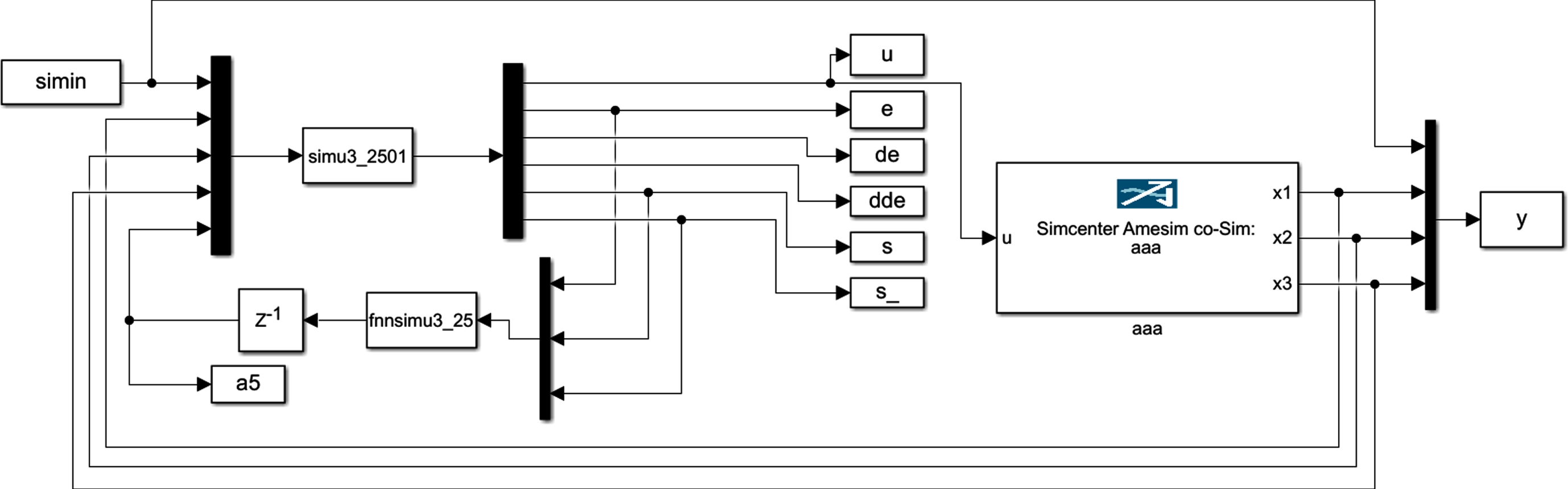
Simulink model of the TNN TSMC.

Amesim model of the hydraulic motor.
Considering the vibration of the drill pipe automatic handling manipulator in practical application, the angular displacement of the hydraulic motor system when it is started is a third-order polynomial of time, as follows:
Based on the above system and controller proposed in this paper, the parameters are trained in the simulation. The trained membership function of the s and the derivative of s are shown in the Figs. 7 and 8. After training the parameters, under the control of the controller proposed in this paper, the actual angular displacement, error of angular displacement, and actual angular velocity curve of the hydraulic motor system are shown in the Fig. 9.

The trained membership function of the s.

The trained membership function of the derivative of s.
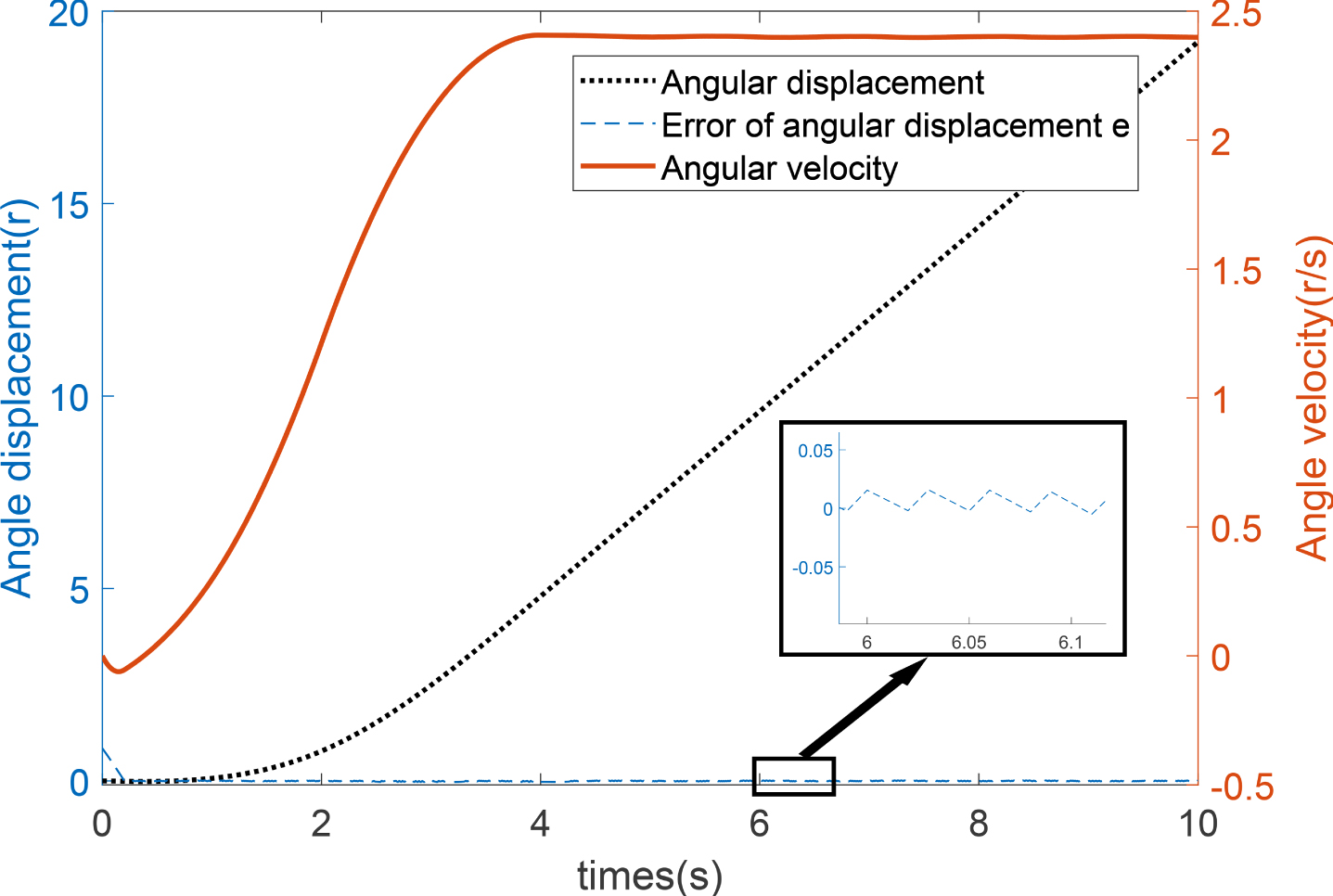
The actual angular displacement, error of angular displacement, and actual angular velocity of the hydraulic motor system.
A variety of different control schemes are applied in the simulation, including the controller proposed in this paper, PID controller, traditional SMC controller, etc. Based on the same conditions and different control schemes, the error of the angular velocity of the hydraulic motor is shown in the Fig. 10. It can be seen in Fig. 10 that the error variation range of FNN-TSMC is the smallest, and the time to reach equilibrium is the shortest. Other methods are used to prove the performance of each control scheme, such as comparing the maximum error and variance, the results are shown in Table 1.

Angular velocity error based on different control schemes.
Comparison of the results of different control schemes
The drill pipe automatic handling manipulator is a hydraulic drilling robot with substantial amount of highly nonlinear, uncertain, and working environment is very adverse, which requires the controller has quite good robustness and applicability. At the same time, the drill pipe automatic handling manipulator docking drill pipe with main shaft of the drill rig, especially the drill pipe is a straight thread drill pipe, which puts forward very high requirements on the motion accuracy of the manipulator.
As shown in Fig. 10, compared with other controllers, the FNN-TSMC controller adopts a nonlinear sliding mode surface to speed up the convergence speed of the system. Therefore, under the same other conditions, the FNN-TSMC controller has the shortest time to stabilize the system. In addition, the use of fuzzy neural network to adjust system gain can reduce system chattering, resulting in lower error peak in the process of system stabilization.
It can be seen from Table 1 that compared with other controllers, the FNN-TSMC controller has the smallest angular displacement error, angular velocity error, which shows that the hydraulic motor system can achieve higher movement accuracy during movement. Through the variance of various controllers, it is proved that the controller proposed in this paper has higher stability. These data verify that FNN-TSMC controller can achieve better control performance than other controllers mentioned in Table 1.
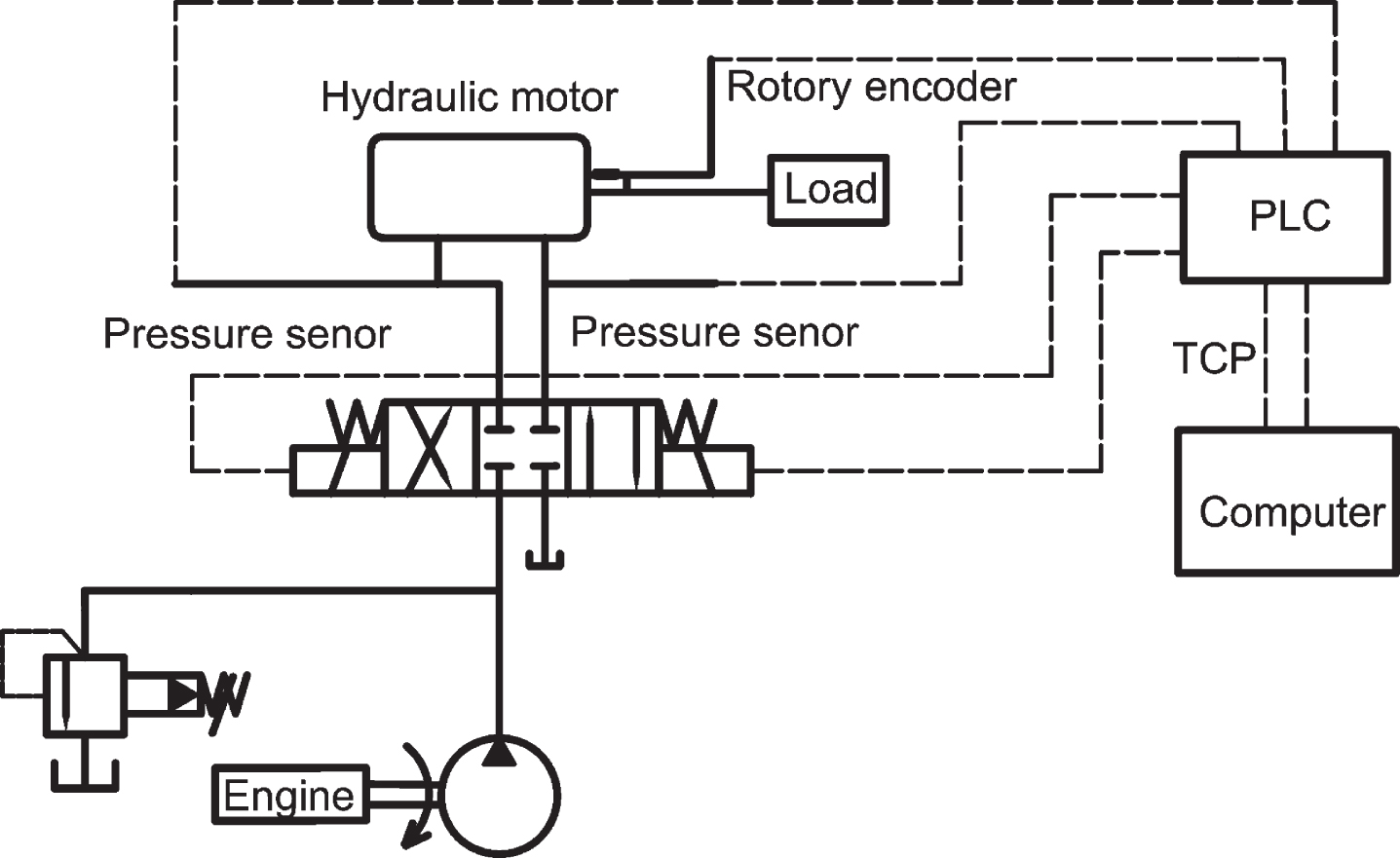
After successfully testing the performance of the proposed controller on the simulation system, a real test was conducted. Figure 11 shows the control system of single hydraulic motor that was built based on a drill pipe automatic handling manipulator. A siemens PLC and a personal computer are used as controllers, and the TCP protocol is used for real-time communication between them. All control algorithm was developed in the personal computer, and PLC is responsible for collection and transmission of signals in the system. Two pressure sensors are installed on the input and output ports of the hydraulic motor, and the pressure signals are transmitted to the PLC. A rotary encoder is used to collect the angle information of the output shaft of the hydraulic motor, and some other components, such as amplifier, D/A converter, etc. are not listed in the Fig. 11.
Control system of single hydraulic motor in drill pipe handling manipulator.
The drill pipe automatic handling manipulator system for field testing is shown in Fig. 12. Figure 13 shows the results of the output angular velocity error in one of the tests. In the actual working conditions where the system is disturbed by external uncertainties, it can be seen from the Fig. 13 that the error will fluctuate during the start-up phase. With the self-learning adjustment of the system parameter, the error gradually fluctuates around zero.

Drill pipe handling manipulator field test.
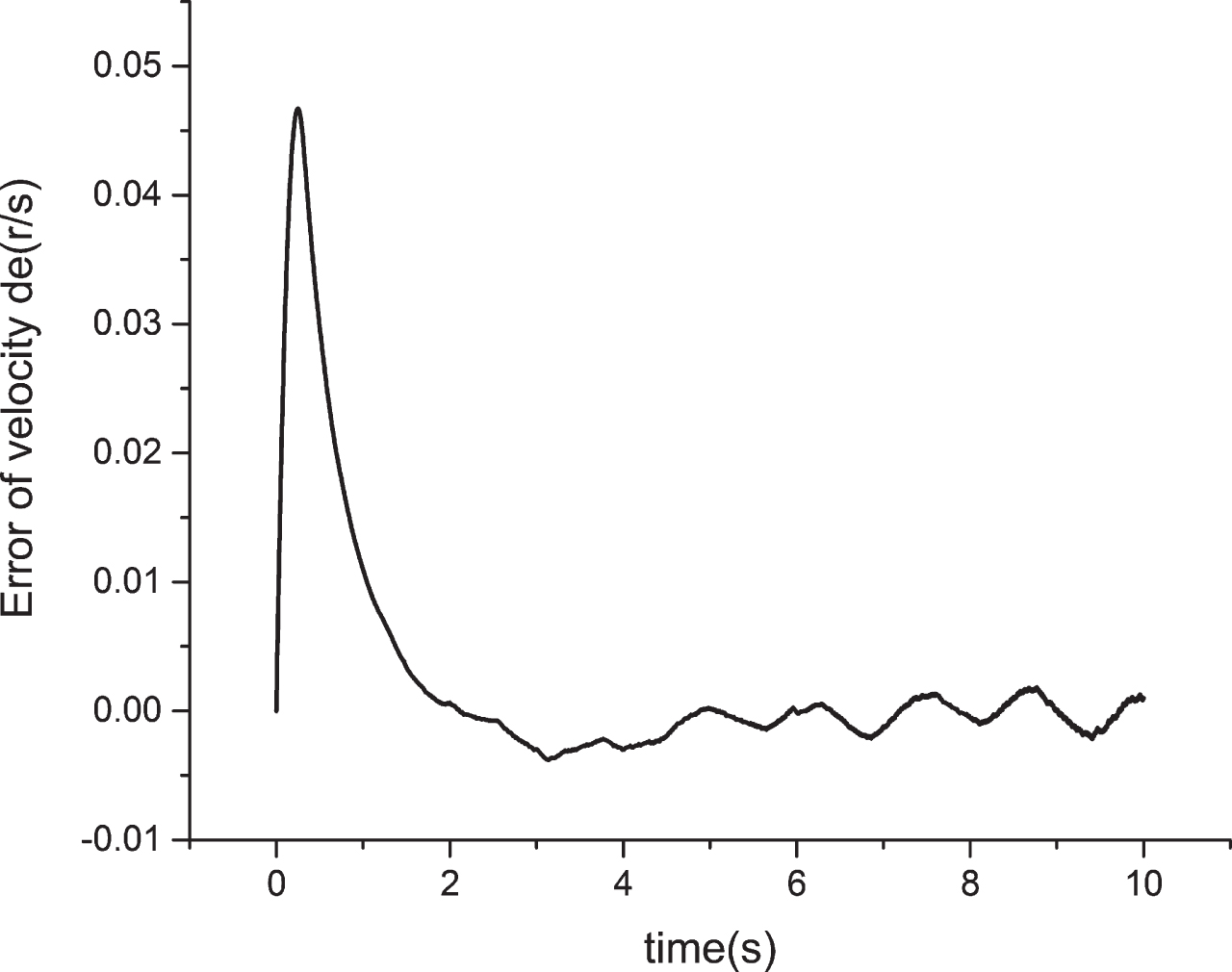
Output angular velocity error.
In the field test, the FNN-TSMC controller keeps the error of the drill pipe automatic handling manipulator within an acceptable range and successfully completes the docking of the straight thread drill pipe and the drilling rig. In addition, the initial value of TSMC is pre-set, this means that the hydraulic motor system can maintain a relatively stable motion before the parameters of FNN have been trained.
A new controller for hydraulic motor system is proposed in this paper. The controller combines the advantages of modern control theory and intelligent control theory. Firstly, intelligent algorithm is used to alleviate the need of TSMC on complex dynamics model, and adaptively adjust the parameter of TSMC to reduce the chatting of the system and accelerate the system to reach the equilibrium point. As shown in Equation (32), the proposed FNN-TSMC controller does not use the knowledge of d1, d2, ΔV (θ), and ΔQ d , which means nonlinear dynamics, disturbances, and uncertainties in the system. Secondly, the controller simplifies the complex self-learning process of intelligent algorithm, and pre-add expert experience to avoid the local convergence of the “black box” control. At the same time, the controller sets the parameter of TSMC in the advance, and don’t rely too much on intelligence algorithm parameter adjustment, which means that if intelligent algorithm fails, it will not affect the normal work of the controller. So that the control system has a strong robustness.
In fact, the aforementioned simulation results proved the robustness of the system against uncertain disturbances and nonlinear dynamics, and has better control performance than original PID and SMC. On the basis of the simulation results, the proposed controller is implemented on a drill pipe automatic handling manipulator. The application showed that the controller can realize reliable motion control of hydraulic motor system. Because of its effectiveness and simplicity, the proposed controller can be used for the practical motion control of drill pipe automatic handling manipulator. Further, the proposed controller will be extended to the motion control of other hydraulic systems.
Footnotes
Acknowledgments
The project was supported by the National Key R&D Program of China (Grant no. 2016YFE0202200).