
Abstract
The problem of quick and accurate fault estimation in nonlinear systems is addressed in this article by combining the technique of radial basis function neural network (RBFNN) and global fast terminal sliding mode control (GFTSMC) concept. A new strategy to update the neural network weights, by using the global fast terminal sliding surface instead of conventional error back propagation method, is introduced to achieve real time, quick and accurate fault estimation which is critical for fault tolerant control system design. The combination of online learning ability of RBFNN, to approximate any nonlinear function, and finite time convergence property of GFTSMC ensures quick detection and accurate estimation of faults in real time. The effectiveness of the proposed strategy is demonstrated through simulations using a nonlinear model of a commercial aircraft and considering a wide range of sensors and actuators faults. The simulation results show that the proposed method is capable of quick and accurate online fault estimation in nonlinear systems and shows improved performance as compared to conventional RBFNN and other techniques existing in literature.
Introduction
For autonomously operating systems, such as aircrafts, constant condition monitoring and online real time fault detection in components, such as sensors and actuators, is vital. It helps to determine the control actions that quickly mitigate or compensate the effects of faults to avoid potential loss of life and property. Analytical methods for fault detection in nonlinear systems are preferred over hardware redundancy approach as they lessen extra costs associated with the installation of extra hardware. These methods also contribute towards the enhancement of system efficiency by lowering the overall size and weight of the system which is critical for an optimized design and low operational cost. Common methods, belonging to the class of model based fault detection, employ techniques to generate residual signals which serve as an indicator of fault occurrence. These methods employ precise model information. The resulting residuals normally aim at providing the indication of occurrence of faults. For the purpose of using the fault information in fault tolerant control (FTC) systems, where timely control actions are critical to maintain the performance and safety of the systems, exact time of occurrence of fault, its shape, magnitude and location are important parameters to be determined online during operation. The acquired fault information must be timely fed back to the control system to ensure safe and smooth operation. Hence, fault reconstruction and its online estimation is a preferred alternative to the mere detection of fault signals through residuals.
Artificial neural networks (ANN) having online learning abilities, nonlinear function approximation and efficient analog VLSI (very large scale integration) implementation capabilities [1] are a good choice for accurate real time fault estimation problems. The reliability of ANN in condition monitoring and fault detection is well established [2]. The two most widely used ANN architectures using supervised learning for online estimation problems are multilayer perceptron (MLP) and radial basis function neural network (RBFNN). The RBFNN has simpler structure as compared to MLP and consequently has much faster training speed. In addition, the complex error surface of MLP suffers from the problem of greater probability of convergence to local minima. RBFNN provide exact interpolation of a set of data points in a multidimensional space. RBFNN learning is the determination of RBFNN centers and weights which have to be adjusted online using some adaptive law, such that the network output converges to the desired output. Gradient descent is a conventional method to update the network weights using error back propagation. The error between the network output and the desired output is back propagated to iteratively update the weights and centers of the neural network till it converges to a minimum value. The problem of quick and accurate online fault estimation in components of nonlinear systems requires that the ANN used in the scheme have quick learning abilities, finite time and accurate convergence of its outputs to the desired outputs. Any detection delay or inaccurate estimation of the fault magnitude can lead to incorrect control signal to the FTC system.
The sliding mode control (SMC) theory, having its roots in variable structure systems (VSS), provides techniques which assure to force the state of the dynamic system to remain on a predefined subspace of the state space. The advantages of SMC are fast convergence, and robustness to handle external disturbances, uncertainties and parameter variation; which have attracted a great amount of interest in robust and fault tolerant control. A variant of SMC called Global fast terminal sliding mode control (GFTSMC), ensures fast and finite time convergence of the states to the sliding surface. The sliding surface is designed in such a way that, when the state of the system is far away from the desired value of the state, the convergence rate is very fast as determined by the so called fast terminal attractor term. Furthermore, when the state of the system reaches in the neighborhood of the desired value, the convergence rate is forced to decay exponentially which gives finite time convergence [3] (as explained in sub Sec. 2.4).
Notable works in literature, combining the concepts of ANN and SMC theory, include [4, 5], where sliding mode algorithm for training MLP neural network was developed. The network trained in this way inherits important features of SMC such as fast convergence speed and robustness. Applications of SMC based online learning of neural networks in flight control applications include [6], where SMC concept was used to train ANN to determine the accurate inverse dynamics of a UAV system. References using adaptive recurrent ANN for fault detection and estimation include [7, 8], where extended Kalman filter (EKF) was used to adaptively tune the weights of recurrent neural networks. The problem of sensor and actuator fault detection in aircraft is addressed by using EKF based RBFNN in [9].
Fault detection and isolation in engineering systems have been in lime light in recent years. A sliding mode observer using adaptive regulation law is proposed in [10] for online reconstruction of forklift sensor faults. A second order EKF based technique was proposed in [11] to detect and locate the faults (blockage) in pipelines using second order Taylor expansion of the nonlinear system with good results. In [12] actuators and sensors faults for a nonlinear time delay switched system are estimated using a fuzzy parameter dependent observer where the system is modeled as Takagi-Sugeno Fuzzy system. Actuator fault estimation considering potential actuator saturation in a 3-DOF helicopter system is addressed using Luenberger observer and unknown input observer in [13]. In [14], a method to detect UAV sensor faults by input and state estimation using PMI (proportional and multiple integral) filter and EKF respectively is presented. Techniques such as Kalman filter and sliding mode observer based [15–17], ANN based [18–23] and fuzzy logic based [24–26] have been used for the estimation of uncertain parameters. Among the mentioned techniques, ANN due to their online learning and nonlinear function approximation capabilities is a preferred choice to be used in online fault estimation problems.
In this research, RBFNN and GFTSMC concept are combined and used in the problem of fault estimation in nonlinear systems. The parameters of the RBFNN are updated using GFTSMC surface instead of conventional error backpropagation. The effectiveness of the proposed technique is established using various realistic fault scenarios in aircraft sensors and actuators. A 6-DoF nonlinear simulation of B-747 aircraft is used for validation of the proposed technique. The finite time convergence property of GFTSMC, and quick and accurate nonlinear function approximation property of RBFNN complement each other to attain quick and accurate online fault estimation. The introduction of GFTSMC sliding surface in RBFNN for weight updating of neural network achieves finite time convergence of the error states and robustness against external disturbances and noises. The results are compared with the results of fault estimation obtained from RBFNN using standard gradient descent error back propagation algorithm. The comparison establishes the effectiveness of the proposed technique as more accurate and quick fault estimation is achieved.
Section 2 of the paper is devoted to the proposed methodology and includes the problem statement, the fault estimation strategy, architecture of RBFNN and conventional weight update laws, GFTSMC surface and its quick and finite time convergence property, new online adaptive weight update law of RBFNN using GFSTMC sliding surface and subsequent stability analysis. As a case study, aircraft dynamic model is presented and application of the proposed strategy to the problem of aircraft sensor and actuator fault estimation is discussed in Section 3. The simulation results are presented and discussed in Section 4. Finally Section 5 concludes the paper.
The main contributions of this work are summarized as; An adaptive RBFNN observer based on GFTSMC technique to update the neural network parameters is proposed which renders accurate fault estimations and provides robustness to unknown external disturbances and system uncertainties. The proposed scheme demonstrates high accuracy in estimation of various kinds of faults, in terms of magnitude and shape, which is evident from simulation results and numerical analysis. Compared to the existing methods in literature, the proposed strategy is more effective for the purpose of real time, accurate and quick fault estimation in components of nonlinear systems.
The proposed methodology
In this section, the problem of sensors and actuators faults in nonlinear systems is formulated and some assumptions, about the nature and magnitude of faults, are made. Further, fault estimation strategy for actuators and sensors is explained. The architecture of conventional RBFNN is explained and a novel method to update the RBFNN parameters using GFTSMC surface is proposed along with its stability analysis.
Problem statement
In the presence of disturbances and faults, a nonlinear system can be represented by the following general mathematical expression;
Where, x (t) ∈ Rn represent the state vector and f : Rn → Rn is state function of the system, g : Rn → Rn×m represent the input function, u (t) ∈ Rm the input vector, y (t) ∈ Rr the output function, the disturbances and uncertainties existing in the system are represented by D ∈ Rn, actuator and sensor faults are represented by fA (x, t) and fS (x, t) respectively. The problem to be addressed is the accurate estimation of faults fA (x, t) and fS (x, t) in Equation (1), A nonlinear model, as described in Equation (1), always has some level of uncertainty, so a GFTSMC based adaptive RBFNN is proposed in this work for the accurate estimation of the faults. A nonlinear model based observer is used to find the expected output and the proposed adaptive neural network (NN) is used for the estimation of faults. The stability of the proposed NN scheme is ensured by imposing the following conditions. Gyro rates variables [p, q, r] and actuator deflections [δa, δe, δr] which are needed for fault estimation are available. In addition, all the state variables x (t), are computable. Actuator and sensor faults, f
S
(x, t) and f
A
(x, t), are bounded. The plant uncertainties D (x, t) are limited to (∥ D (x, t) ∥ ⩽ Xmax) their maximum magnitude (Xmax).
Nonlinear, unpredictable and random nature of faults in the system and importance of their quick and accurate estimation in real time for FTC system design make ANN an ideal choice to be used in the process. The outputs of the faulty sensors/actuators and estimates of the corresponding parameters from a nonlinear observer are used for the proposed fault estimation strategy. The nonlinear observer is defined as
Where,
Subtracting Equation (2) from the nonlinear system Equation (1), defining
Where,
Similarly, estimation error of sensors can be calculated from Equation (5).
The RBFNN consists of three layers of neurons (as shown in Fig. 1) and operates in feed forward format. The layer in the middle, is called hidden layer and the layers on the left and right of middle layer are termed as input and output layers respectively. Nonlinear activation functions in the form of radial basis functions (RBF), denoted as (h j ), are used in all the nods of the hidden layer. The function of the hidden layer is to execute a nonlinear transform of the input signal. To map the nonlinearity into a new space, the output layer acts as a linear combiner. Common practice is to have same RBF on all the hidden layer nodes. Thus, the nonlinearity of RBF nodes can be written as h i (x) = h (x - c i ) , i = 1, …, j, where, h (x) denotes an RBF and c i is the center of the ith node. Using the linear optimization method, optimal solution for the tunable weights of RBF is achieved by minimizing the mean square error. The training process of the neural network can be described by means of a control process as shown in Fig. 2. The difference between the desired network error and the actual network error is fed into the training block which changes the connection weights of the neural network. The network calculates an output signal from the inputs. The actual network error is the difference between the desired network output and the actual output.
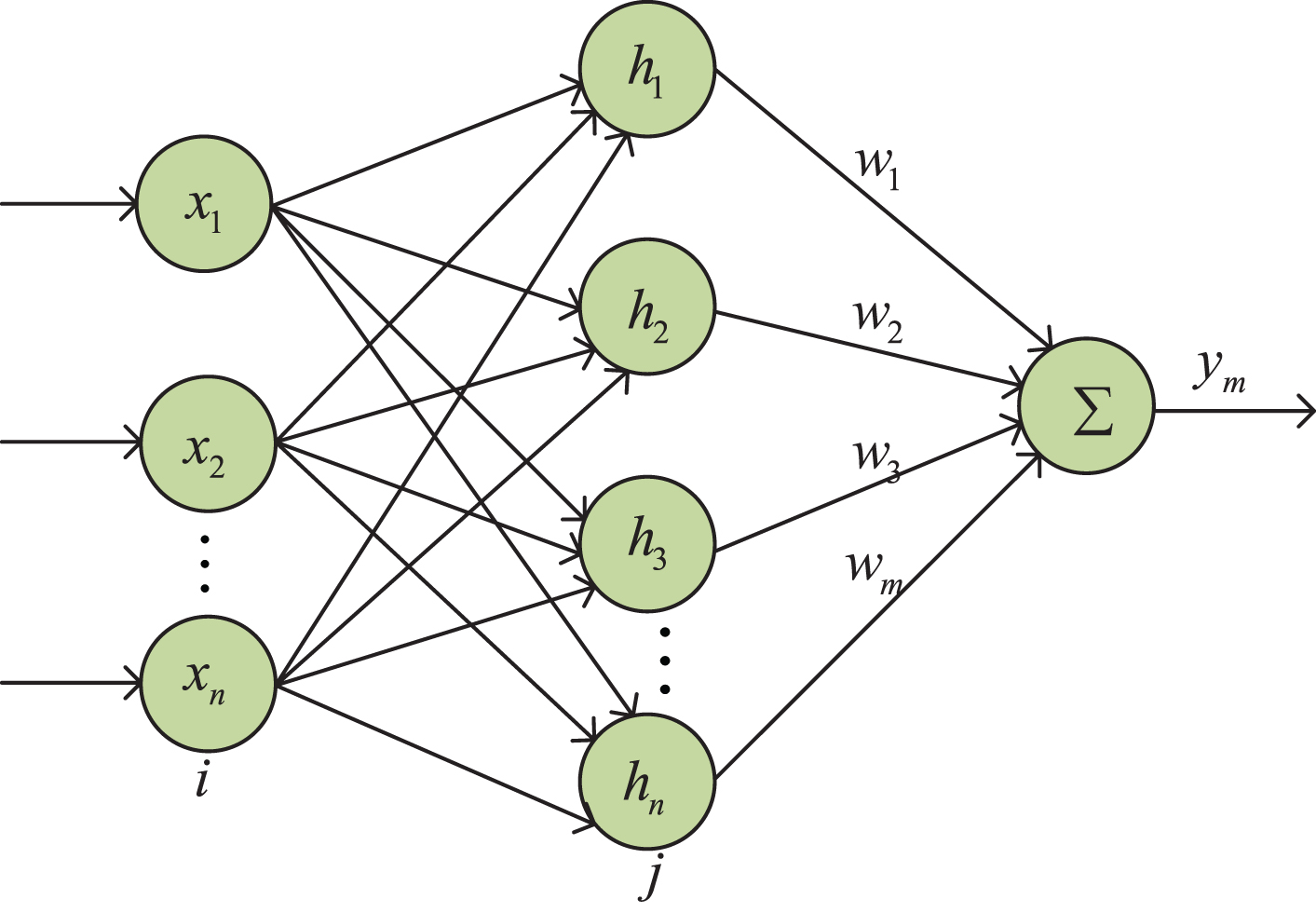
Architecture of RBF network.

Controlled system and NN analogy.
Let in RBFNN, x = [x
i
]
T
is the input vector, there are m number of neural nets, RBF vector in the hidden layer is denoted as h = [h
j
]
T
, where h
j
is the Gaussian function value of the neural net j in the hidden layer. There are a number of functions which can be used as RBF in RBFNN [1], among them the Gaussian RBF function is the only function that is factorizable which is a desirable property for hardware implementation of RBFNN, that is why Gaussian function is chosen here for implementation and is given as
Where, c = [c
ij
] represents the coordinate value of the center point of the Gaussian function of the neural net j for the ith input, i = 1, 2, … . n, j = 1, 2, … . , m. b
j
> 0 represents the width value of the Gaussian function for the neural net j. The weight value of the RBF is w = (w1, …, w
m
)
T
and its output value can be written as
The performance index function of RBFNN can be expressed as
RBFNN learning requires the determination of the RBF centers and the weights. The gradient descent method provides the simplest solution for the supervised learning of these parameters. The centers/clusters and weight update laws based on gradient-descent method, using conventional error back propagation, are given as
Where, η is the learning rate of the network and λ represents momentum factor, η ∈ [0, 1] , λ ∈ [0, 1]. Equations (9–14) represent the conventional gradient descent error back propagation method for training or online updating of the neural networks parameters. The gradient descent method described above is slow to converge and is prone to find local minima of the error function.
The idea of SMC is to identify a region within the state space of a dynamic system where the system is stable and returns to the equilibrium state within finite time after activation. If such a region exists, also called sliding surface, a control law has to be found to ensure that the system reaches the sliding surface within finite time and remains there.
A novel RBFNN training algorithm based on the GFTSMC theory is proposed here to accomplish the online training of RBFNN parameters to minimize the estimation error of the network to achieve quick and accurate finite time fault estimation.
Let the desired output of the neural net be y (t) and its measured output at any time instant t is y
m
(t). The measurement error can be defined as
This error is used to update the RBFNN parameters in conventional scheme as shown in Equations (9–14).
The task of the estimation scheme is to make the estimation error e converge to zero in finite time. According to GFTSMC theory, the design of sliding surface variable is given as
Where α0 > 0, β0 > 0, a and b are odd integers that satisfy a > b. The estimation error e is the state variable. Select the sliding surface variable s = 0, then
It can be seen from the Equation (19) that the estimation error converges to the sliding mode surface in finite time.
For the purpose of accurate fault estimation in nonlinear systems, conventional RBFNN parameter updating procedure described in Sec. 2.3 is modified by introducing the GFTSMC surface in RBFNN. In conventional method of learning, the network parameters are updated using conventional error (the difference between the desired and actual output of the network at any instant) backpropagation. Here, for quick and accurate online fault estimation, the GFTSMC surface is introduced in RBFNN in place of conventional error. Now the goal of modified RBFNN is to iteratively adjust its parameters to satisfy the condition of sliding on the surface so that the estimation error can be minimized. It has already proved in Equaton (17) that once the system is on the sliding surface the estimation error converges to zero. Now the Equations (9, 11 and 13) can be written in modified form as
It is clear in Equation (19) that the estimation error converges to zero in finite time if the sliding surface variable converges to zero. Here, the task is to establish the convergence of the sliding surface variable to zero.
The Lyapunov function based on sliding surface is defined as
As the training step is being represented by subscript j, we can write the condition in Equaton (23) as |sj+1| < |s
j
|, Let the simulation step size is represented by t
s
, then derivative of the error term in Equation (16) can be computed as
Using the Equation (24) along with Equation (16), the terms s
j
and sj+1 can be written as;
In Equation (27), Δyt,j is related to the desired output and is known. The second term Δy
j
can be computed using Taylor series expansion as
The derivatives,
Let’s assume that the neural network has only one output neuron and is represented by the index k. Here, we define
Using Equations (30) and (31) in Equation (29) we get
For convergence, the limitation of η can be set as defined in (32).
The developed algorithm for fault estimation is analogues to a standard feedback controller and uses information from SMC and standard backpropagation algorithm. Weight updates of the network are analogues to the control actions. The iterative process to update the weights of the network can also be seen as an optimization process where the goal is to find the ideal combination of weights to minimize the objective function which in this case relates to the estimation error. As the controlled system behavior is dictated by the designed sliding surface to establish the sliding motion so, fast and accurate finite time convergence property of the GFTSMC surface is used to obtain quick and accurate online fault estimation.
In this section aircraft dynamical model is presented. The proposed methodology in Sec. 2 is used to address the problem of fault estimation in aircraft sensors and actuators as a case study. Implementation details of the proposed fault estimation strategy is also presented in a separate subsection.
Aircraft dynamic model
Fault estimation problem addressed in this article requires the availability of accurate dynamic model of the system to be studied. In this subsection, non-linear dynamics of aircraft is presented as in [27]. Equations (33–40) describe the non-linear dynamics of aircraft in 6-DoF over flat earth. Definitions of the symbols used are summarized in Table 1.
Symbols and Definitions
Symbols and Definitions
Where L, M and N are the total moments acting along x, y and z axis respectively. The forces and moments are functions of control surface deflection, angle of attack, sideslip angle, angular rates and bank angle. The control surface deflections, δa, δeandδr related to aileron, elevator and rudder deflections respectively, serve as inputs to the system.
Actuators fault estimation
The aircraft attitude is controlled mainly by three actuators attached to aileron (δ
a
), elevator (δ
e
), and rudder (δ
r
). Timely information of the existence of fault in these components is critical. The proposed strategy for fault estimation in actuators is described in this section. The aircraft angular rate equations in the presence of actuator faults can be written as
where
The uncertainties in the system are represented by D (x, u), actuator noise by N A and actuator faults by f A (x, t).
Considering the origin of the body coordinates coincides with the gravity center and fixed throttle settings, the total moments L, M and N acting along x, y and z axis respectively can be broken down into the sum of aerodynamic moments and control moments.
The rolling, pitching and yawing moments are represented as L
δA
, L
δR
, M
δE
, N
δA
, N
δR
, are generated due to control input deflections. Ignoring the cross coupling in control moments, we can write
Where,
Now, fp, f
q
and f
r
are obtained as.
Application Fault estimation strategy as described in section 2.2 for actuator faults gives
Where,
Fault estimation in gyro sensors measuring roll, pitch, and yaw rates, denoted by p, q and r respectively, about the body-fixed frame is considered for the validation of the proposed scheme. Actuators fault estimation procedure as discussed in Section 3.2.1 is applied to the problem of sensors fault estimation to get
Where F represents the output of GFSMC based RBFNN indicating the fault signal,
A nonlinear 6-DoF simulation of B-747 aircraft developed in MATLAB/SIMULINK environment is used for the validation of the proposed scheme. Detailed specification and parameters of the aircraft can be found in [28]. In the closed loop simulation, a controller based on nonlinear dynamic inversion method is used for attitude control of the aircraft and to maintain stability. Parameter initialization of the proposed neural network adaptive structure are given in Appendix A under Table 4. Separate neural network observers are employed for fault estimation of each parameter, so that the faults are automatically isolated. The RBFNN consists of three layer having one neuron each in the input and output layers and seven neurons in the hidden layer. Noise is also considered in the system dynamics so as to replicate the practical scenario. This makes the fault estimation more challenging task for the proposed scheme. The added noise is shown in Fig. 6. Fault estimation results obtained by using the proposed scheme are compared to the results obtained by using standard backpropagation RBFNN in the estimation scheme. In addition, numerical analysis of the results obtained from both methods is carried out by calculating the root mean square error (RMSE) of the actual and estimated fault signals.
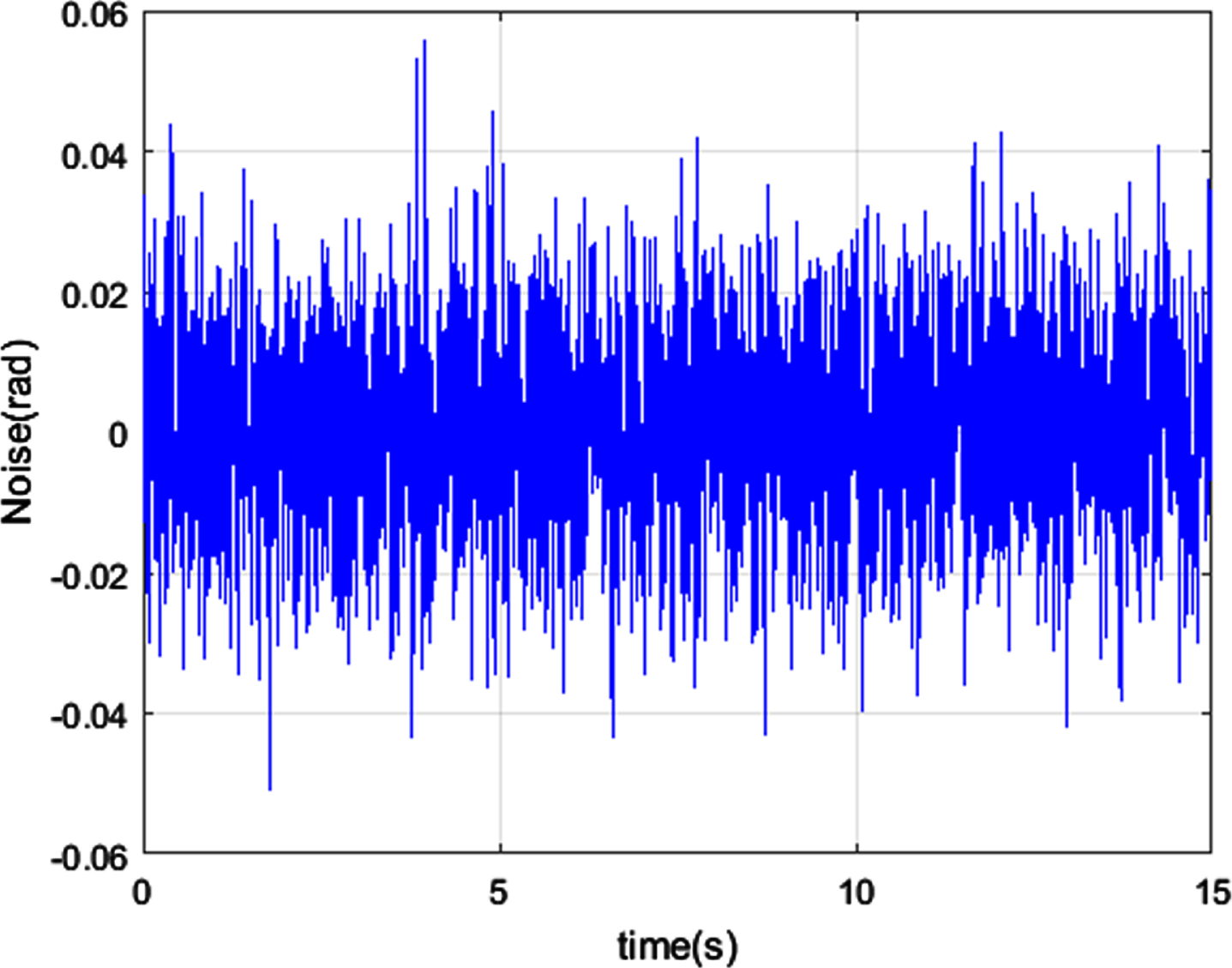
Added noise to the system.
The steps involving the proposed GFTSM technique to update the parameters of RBFNN for fault estimation in the close loop simulation are shown in Fig. 3 and are summarized as under
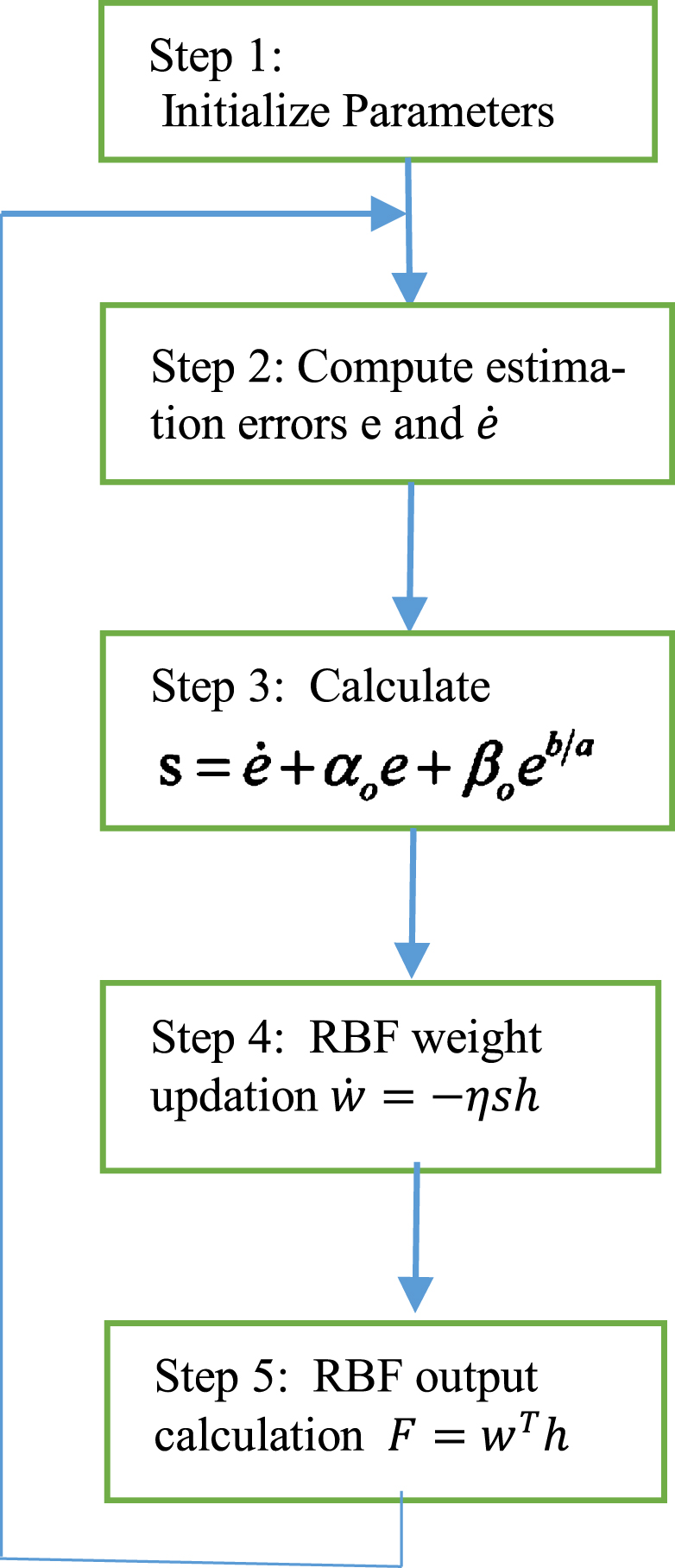
Steps involving proposed fault estimation strategy.
Figure 4 represents the overall scheme for the implementation of proposed fault estimation strategy for the aircraft actuators. The nonlinear observer shown in Fig. 4 is developed using aircraft nonlinear dynamics as presented in section 3.1 and Equations (41–45). Fault estimation is obtained by using the proposed GFTSMC based RBFNN as depicted in Fig. 3. Similar scheme is adopted for the fault estimation of sensors as shown in Fig. 5, where the nonlinear observer for estimating the expected sensor output parameters is similarly designed using aircraft nonlinear dynamics as presented in section 3.1.
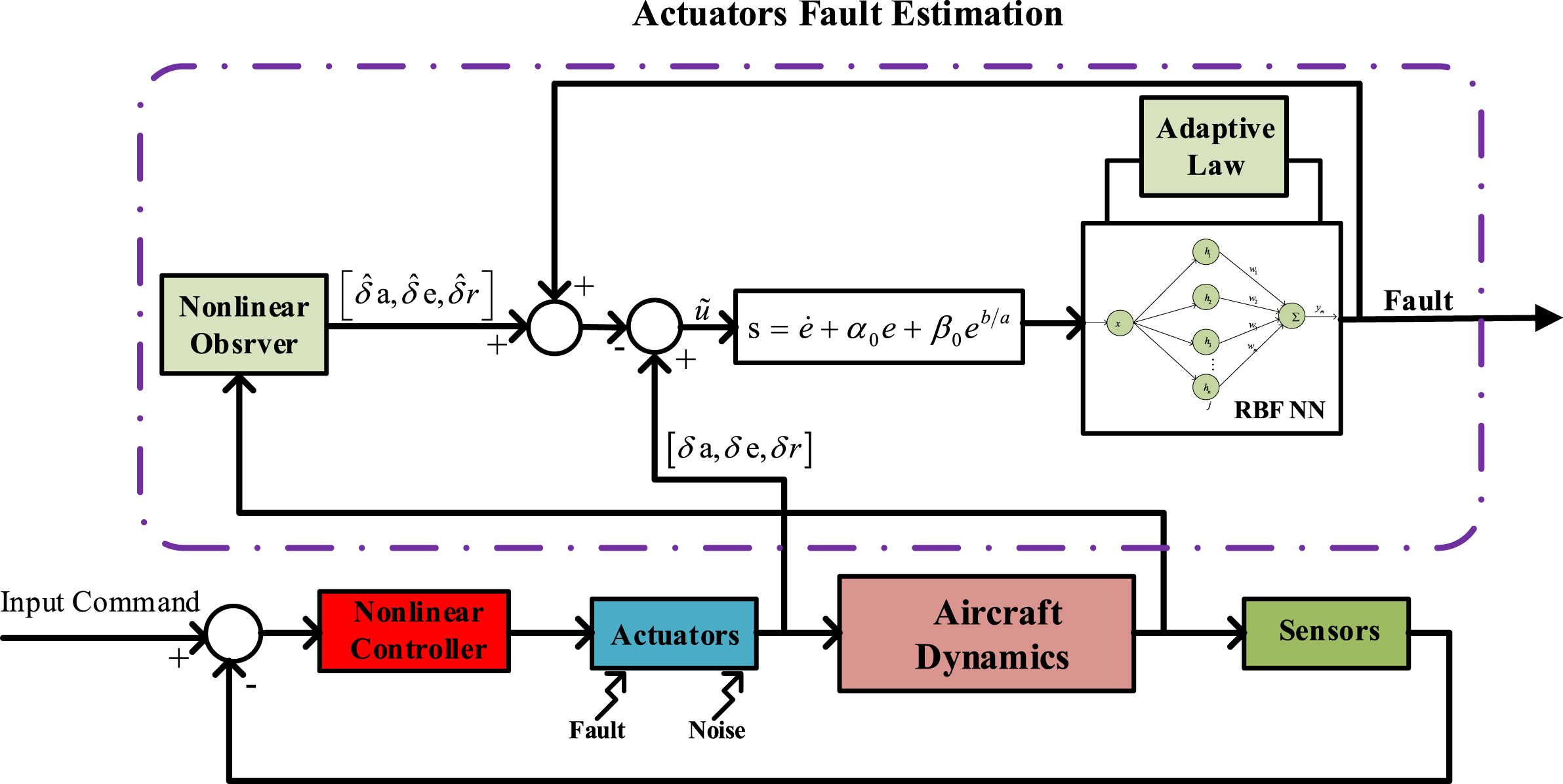
Overall structure of the proposed scheme for aircraft actuators fault estimation.

The overall structure of the proposed scheme for aircraft sensors fault estimation.
Various types of faults, commonly occurring an aircraft actuators and sensors, are considered to establish the effectiveness of the proposed fault estimation scheme. Three type of faults, namely abrupt, incipient and intermittent faults, are common and occur due to various reasons such as communication breaks between sensor/actuator and control, external noises, network bandwidth and processor limitations, inaccuracy of sensor/actuator, short circuits etc. [29, 30]. Abrupt fault is a sudden change in the measured parameter value due to some fault in the component. Accurate estimation of these faults is a challenging task due to fast fault dynamics.
In this work abrupt faults are exemplified as three types of signals, rectangular, triangular and pulse and are used as injected faults to ascertain the efficiency of the proposed fault estimation scheme. Incipient faults arising from partial failure or malfunction of actuators/sensors have small effect and due to their small magnitude they often go undetected and contribute to continuous degradation of the equipment and performance. Incipient faults considered for the validation of the proposed strategy are similar to as described in [15]. Detection of intermittent faults having small size and occurring at irregular intervals is also an important and a challenging task. These faults are mostly caused by loose or improper connections of electric wires. The proposed strategy is also applied to estimate intermittent faults in actuators and sensors of the aircraft.
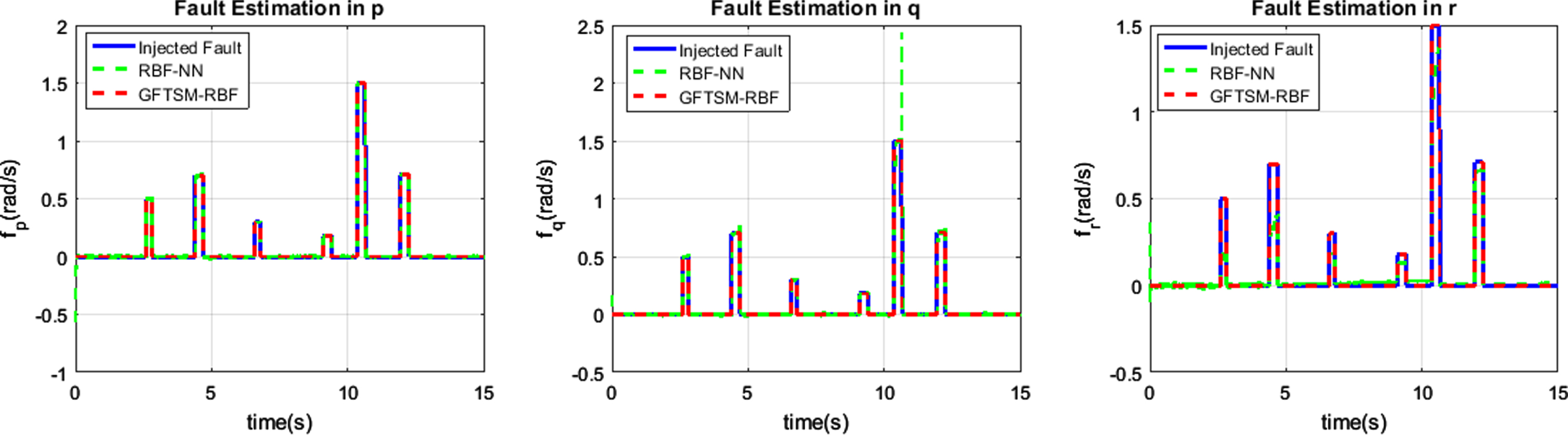
The Results of the simulation are shown in Figs. 7–15. Figure 7 shows the response of the fault estimation strategy using the proposed GFTSM based RBFNN and conventional RBFNN in case of rectangular faults occurring in gyro rate sensors. It can be seen that conventional gradient descent error backpropagation method produces overshoots at some points and shows slow convergence in case of fault estimation in r. Similarly, Figs. 8 9 show results in case of two more abrupt faults namely triangular fault and pulse fault respectively. Again, the result depict the accuracy attained in fault estimation in gyro rate sensors using the proposed strategy as more accurate fault estimation and quick fault detection is achieved as compared to using the conventional RBFNN in the fault estimation strategy. As accurate and timely detection and estimation of incipient and intermittent faults is also critical for any fault detection/estimation scheme, these fault types are also considered for the evaluation of the proposed scheme. Figs. 10 11 show the results in case of incipient and intermittent faults respectively. Again the proposed scheme clearly shows better performance in comparison to using conventional RBFNN and achieves quick and accurate fault estimates. Similar to gyro sensor’s fault estimation, actuator faults are also considered in the system. Faults are injected in the actuators controlling aileron, elevator and rudder to establish the accuracy of the proposed method. Figures 12–14 show results in case abrupt faults namely rectangular, triangular and pulse respectively. The results clearly show that that using GFTSM based RBFNN in the proposed scheme produces more accurate results with quick convergence avoiding overshoots. Figures 15 16 show the results of actuators fault estimation in case of incipient and intermittent faults respectively. Due to small magnitude and random nature of these faults and presence of noises, detection and accurate estimation of these faults is always a challenge for any fault detection strategy. The results clearly demonstrate that our proposed method detects and estimates the subject faults in real time with much better accuracy as compared to using conventional RBFNN in the fault estimation scheme. Table 2 and Table 3 summarizes the RMSE values of sensors and actuators fault estimation results. It is clear from the compiled data that the efficiency of the fault estimation scheme increases considerably by using proposed GFTSMC based RBFNN instead of conventional gradient descent error backpropagation method to tune the RBF parameters.
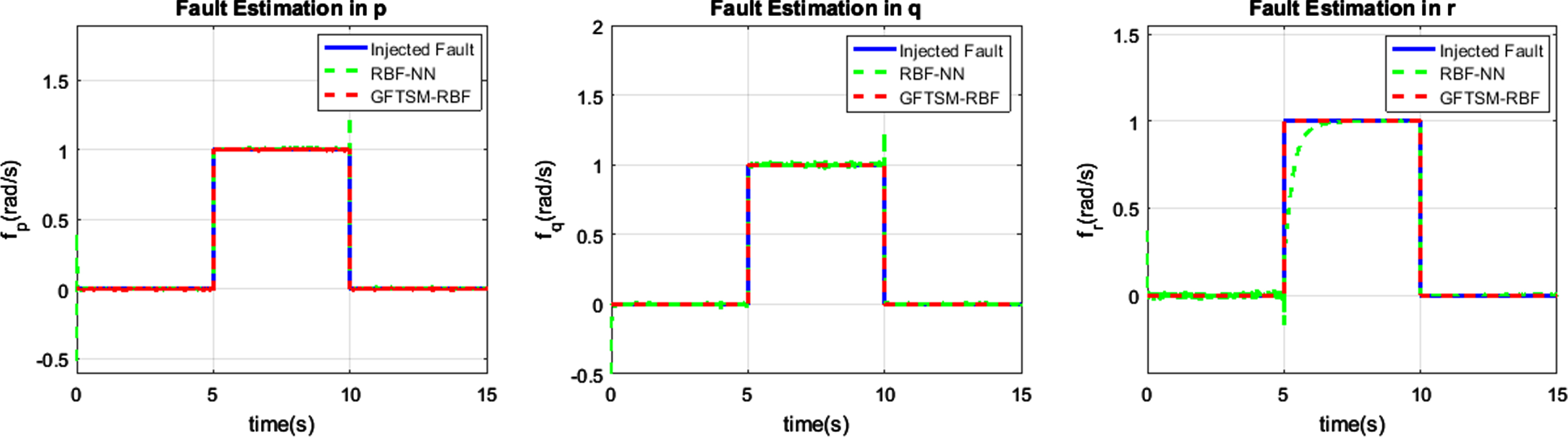
Rectangular fault estimation in sensors using proposed method and conventional RBF-NN.
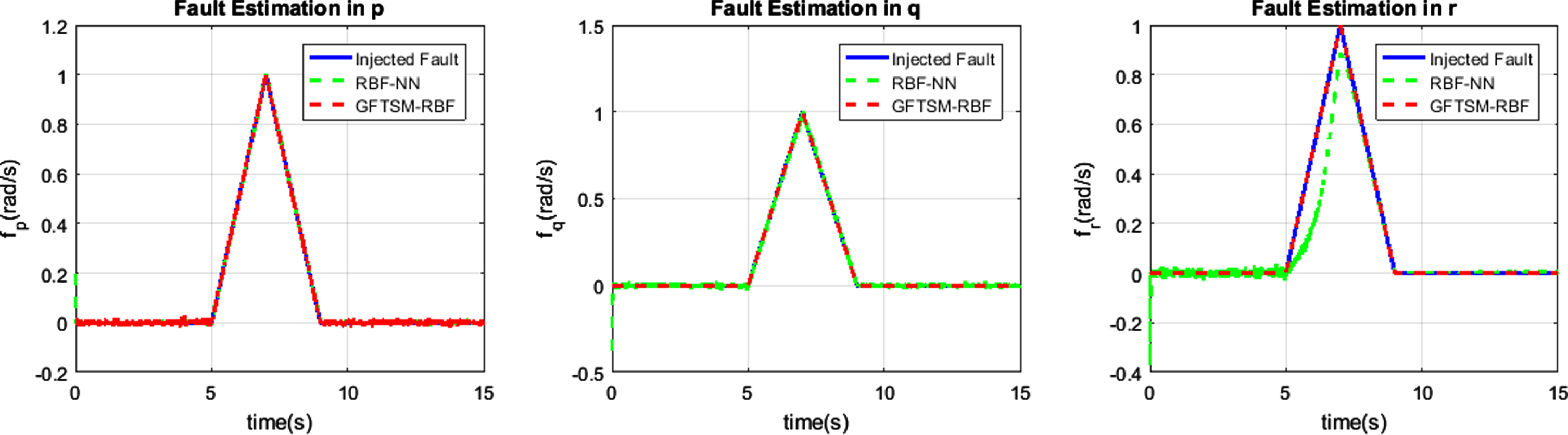
Triangular fault estimation in sensors using proposed method and conventional RBF-NN.
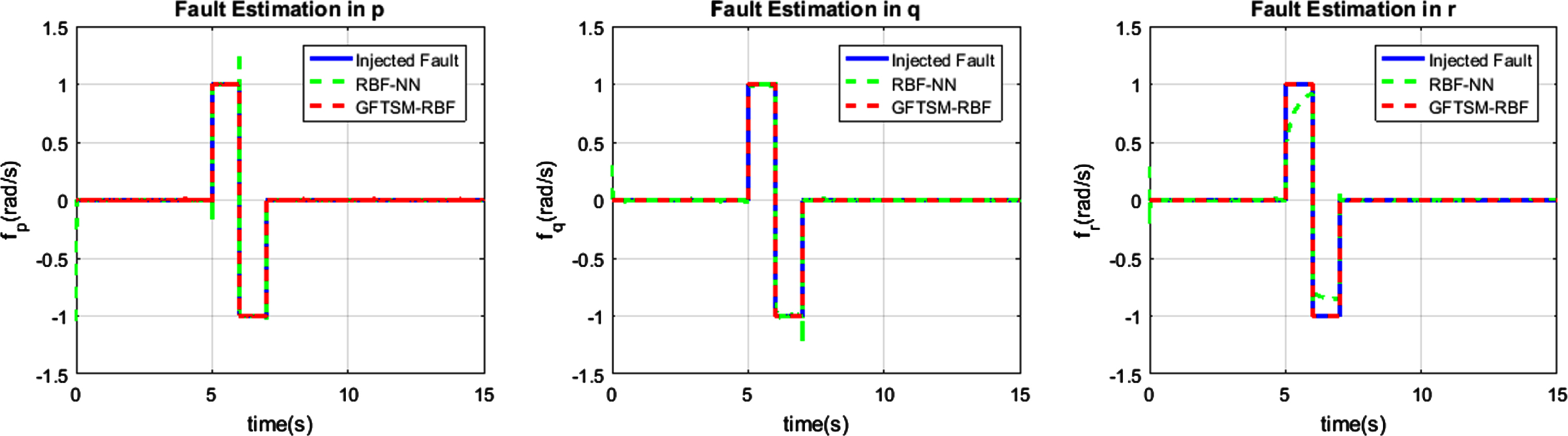
Pulse fault estimation in sensors using proposed method and conventional RBF-NN.
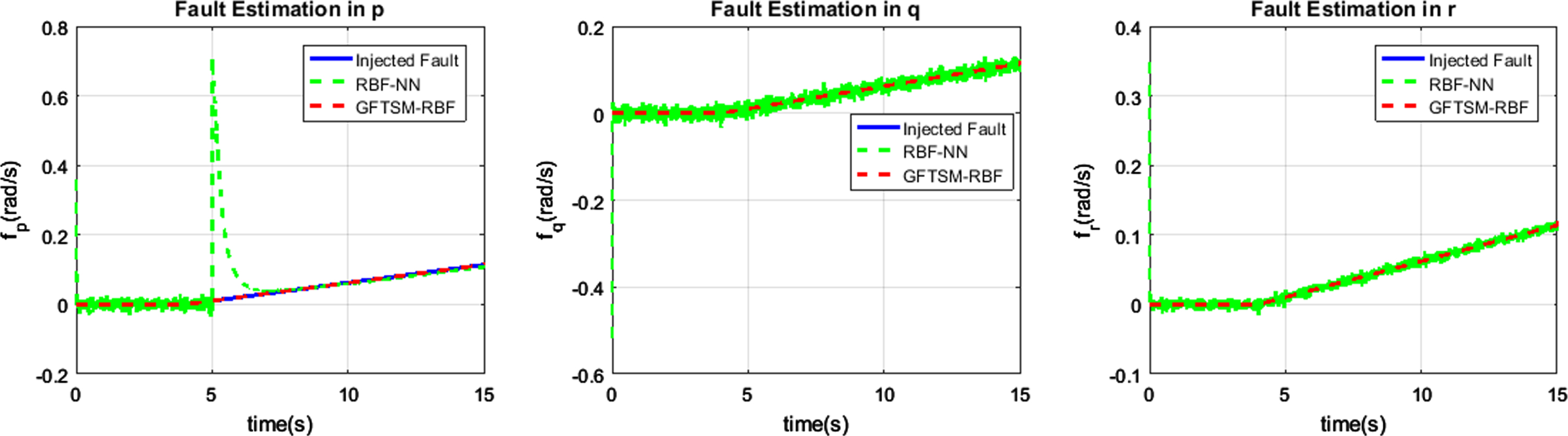
Incipient fault estimation in sensors using proposed method and conventional RBF-NN.
Intermittent fault estimation in sensors using proposed method and conventional RBF-NN.
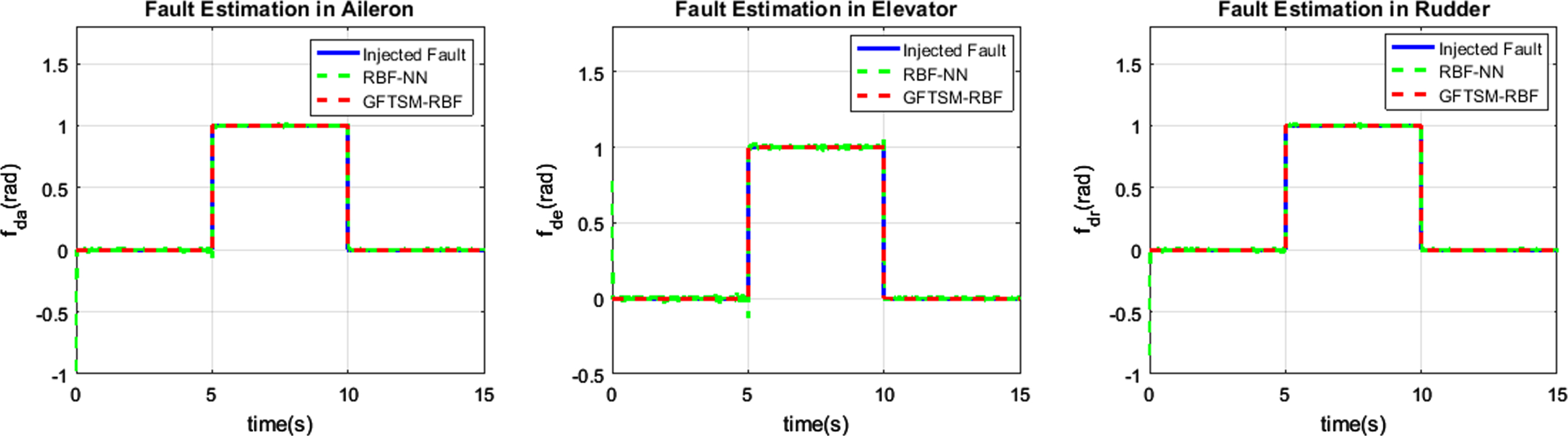
Rectangular fault estimation in actuators using proposed method and conventional RBF-NN.
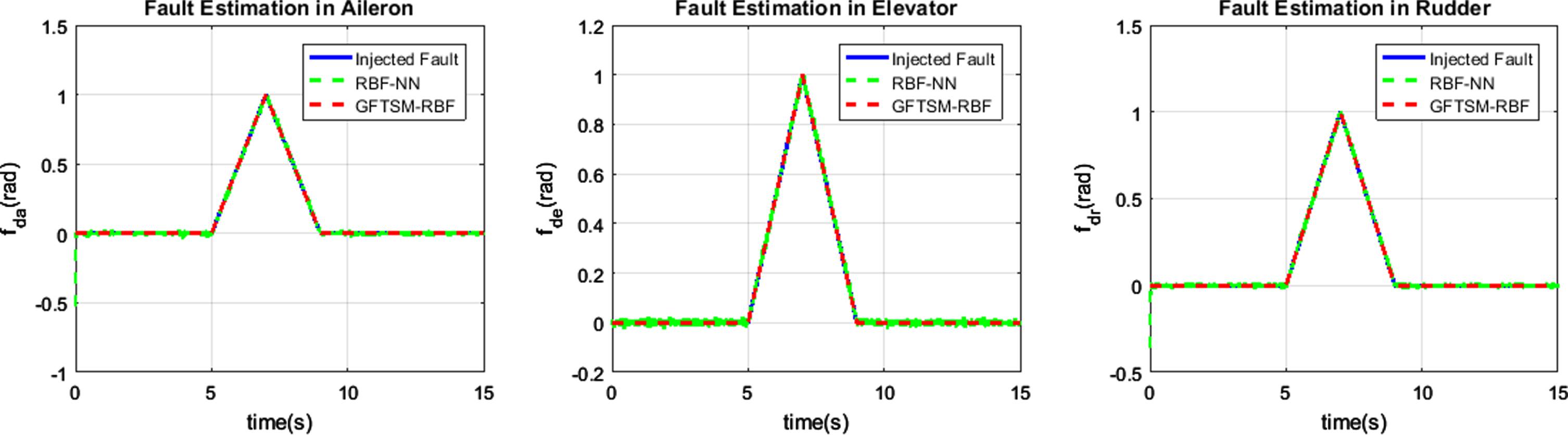
Triangular fault estimation in actuators using proposed method and conventional RBF-NN.
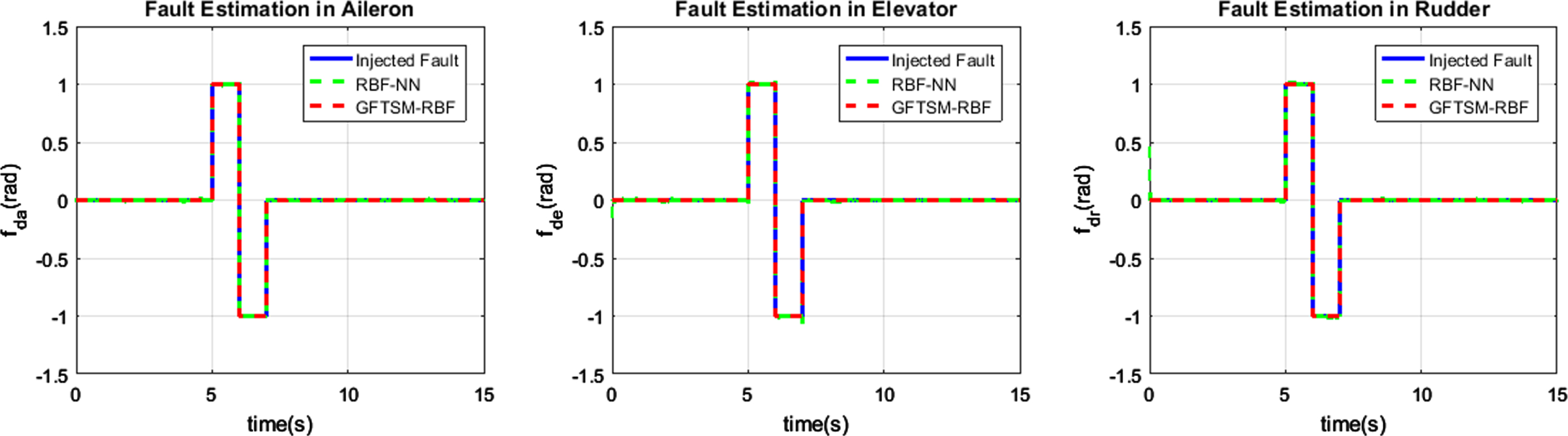
Pulse fault estimation in actuators using proposed method and conventional RBF-NN.
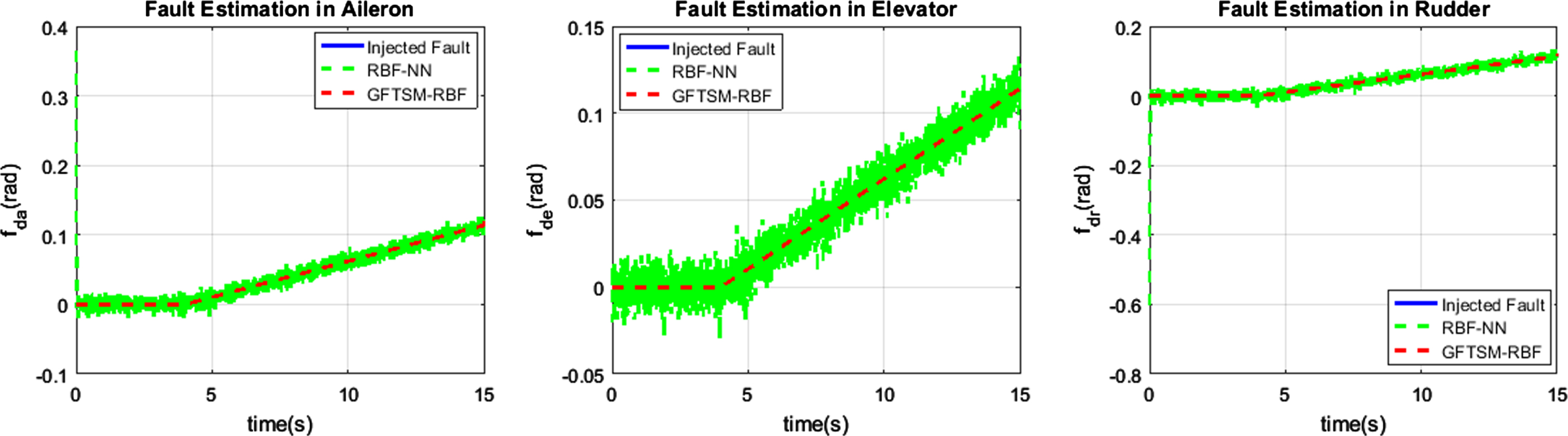
Incipient fault estimation in actuators using proposed method and conventional RBF-NN.
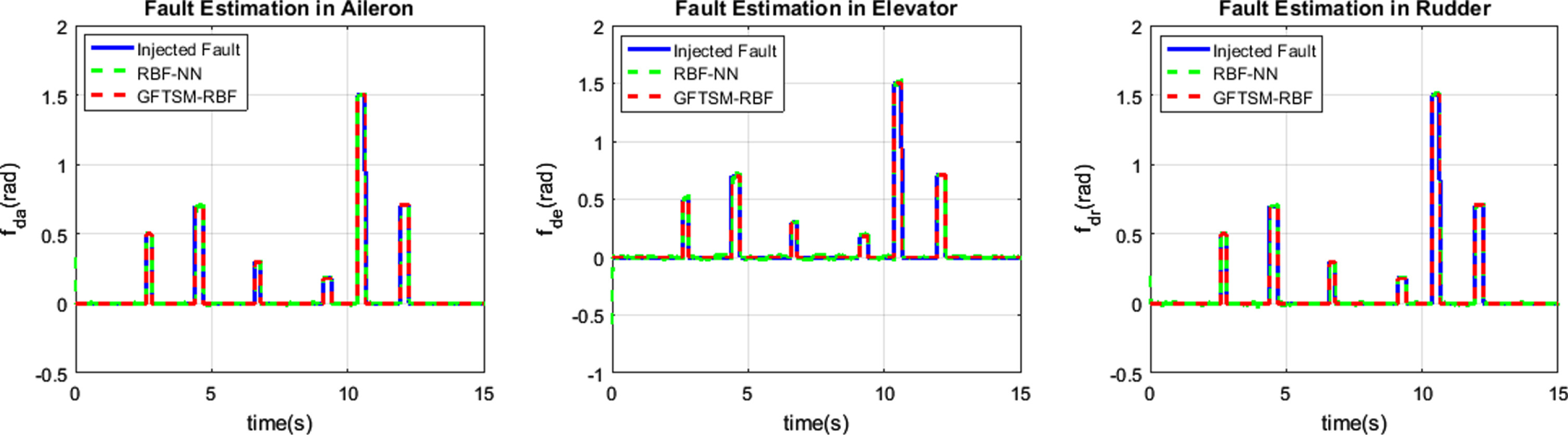
Intermittent fault estimation in actuators using proposed method and conventional RBF-NN.
RMSE comparison in case of sensor fault estimation
RMSE comparison in case of actuator fault estimation
Real time detection and accurate estimation of faults is vital to maintain safety and performance of nonlinear systems such as aircrafts. Accurate online fault estimation in system components such as sensors and actuators ensure the availability of right information to the FTC system for generation of commands to mitigate the effects of the faults. It is also critical for health monitoring of the components of the system.
In this work, an online fault estimation strategy is proposed for fault estimation in components of nonlinear systems in which RBFNN is used to estimate the faults. A novel method to adaptively tune the RBFNN parameters based on the concept of GFTSMC surface instead of using conventional gradient descent error backpropagation method is introduced to enhance the efficiency of the fault estimation. The proposed method is implemented using a nonlinear 6 DoF simulation of B-747 aircraft. A wide range of sensor and actuator faults are considered. The results clearly show the effectiveness of the proposed strategy as more accurate results are obtained. Graphical as well as numerical comparisons of results clearly show that the better results are obtained using proposed GFTSMC based RBFNN instead of conventional RBFNN in the fault estimation scheme. It is concluded that the proposed method can be used for real time accurate fault estimation in components of the nonlinear systems such as aircrafts and UAVs.
Footnotes
Acknowledgments
We are grateful to the editors and reviewers for processing and reviewing this work.
This work is supported by the Aeronautical Science Fund of China under Grant No. 20180753005 and Grant No. 201958053003.
Appendix
Parameter Initializations
| Parameter | Value | Definition |
| α0 | 01 | Sliding surface variables |
| β0 | 01 | |
| a | 07 | |
| b | 05 | |
| η | 0.9 | Learning rate of RBFNN |
| λ | 0.05 | Momentum factor |
| w | Random in range [–1 1] | The initial value of the weight updating parameter of the second hidden layer |
| b | 3*ones(7,1) | Widths of of RBFNN |
| c | [–1.5 –1 –0.5 0 0.5 1 1.5]; | Clusters of RBFNN |