
Abstract
With the rapid development of new energy vehicles, the reliability and safety of Brushless DC motor drive system, the core component of new energy vehicles, has been widely concerned. The traditional open circuit fault detection method of power electronic converters have the problem of poor feature extraction ability because of inadequate signal processing means, which lead to low recognition accuracy. Therefore, a fault recognition method based on continuous wavelet transform and convolutional neural network (CWT-CNN) is proposed. It can not only adaptively extract features, but also avoid the complexity and uncertainty of artificial feature extraction. The three-phase current signal is converted into time-frequency spectrum by continuous wavelet transform as the input data of AlexNet. At the same time, the changes of time domain and frequency domain under different fault modes are analyzed. Finally, the softmax classifier with Adam optimizer is used to classify the fault features extracted by CNN to realize the state recognition of different fault modes of power electronic converter. The experimental results show that the CWT-CNN model achieves satisfactory fault detection accuracy under different working conditions and different fault modes. The effectiveness and superiority of the proposed method are verified by comparing with other networks.
Keywords
Introduction
With the increasingly severe situation of environmental pollution and energy crisis, new energy vehicles have become the trend of future development. The technology of converting electric energy into mechanical energy is widely used in new energy vehicles, which has changed the energy supply mode of traditional vehicles. As the core of new energy vehicles, electric machinery is required to be high efficiency and high adaptability. Due to cost and space constraints, the high-density, small-weight, lightweight and low-cost of the motor is vital for the entire vehicle. Therefore, the brushless DC motor drive system is the key to new energy vehicle technology.
As the core of electric vehicles, motor drive systems have received extensive attention for their reliability, stability and testability [1]. Power electronic converter is the core component of the whole drive control system, which is composed of multiple power switches and freewheeling diodes. Due to the frequent on and off states of power switches, thermal stress and electrical stress, it is more prone to failure [2–4]. If the faulty power switch cannot be identified quickly, the whole motor drive system may be down and even cause serious economic losses.
The failure modes of switches usually include open-circuit fault (OCF) and short-circuit fault (SCF). This paper mainly discusses the OCF. When OCF occurs, the fault branch continues to work relying on freewheeling diode, which reduces the system performance. It may cause a secondary failure of the converter, leading to paralysis of the entire motor drive system. Therefore, the research on the open circuit fault diagnosis method of the converter is of great significance in reducing economic losses and improving the stability of the drive system [5–7]. For the new energy automobile industry, the improvement of the reliability of the electronic control part can also promote the steady development of the entire industry.
The fault diagnosis methods of power electronic converters are mainly divided into analytical models-based methods(AMM) and data driven-based methods(DDM). AMM is a quantitative description of the process mechanism and characteristics of the monitored system. According to the analytical model, the residual information which can represent the influence of fault on system performance can be obtained. Then the residual is analyzed to achieve the purpose of fault diagnosis. Yu et al. [8] proposed a model-based fault diagnosis method for voltage and current sensors, which uses an open-circuit voltage residual generator and a capacitive residual generator to generate multiple residuals. According to different applicable state-of-charge intervals, different residuals are selected to evaluate whether the sensor fails. Chen et al. [9] constructed a current estimator based on the health hybrid system model and used HSM to simulate different fault types of different voltage source inverters. Euclidean distance method was used to evaluate the similarity between simulated fault types and actual fault types. Yi et al. [10] proposed a new method of combining analytical model with artificial neural network. The motor model is divided into linear model and nonlinear model, and the nonlinear part is fitted by BP neural network. Then an adaptive observer is established to realize the fault diagnosis of the motor by analyzing the current residual. Faiz et al. [11] proposed a hybrid analysis model based on the improved winding function theory, which can consider the winding distribution and the change of permanent magnet working point at the same time. It is used for motor optimization and fault diagnosis. However, there are many conditions and constraints in the process of establishing the model, which cannot take into account the influence of various uncertain factors, the simulation signal is still different from the actual situation.
Based on the data-driven method, data mining technology is directly used to obtain the effective information hidden in the collected signal to represent the running state of the system. Mansouri et al. [12] used the interval based Gaussian process regression model to extract the nonlinear statistical features of interval values. The random forest algorithm is used for fault diagnosis. The uncertainty of wind energy conversion system is better solved. In order to reduce the amount of data in the training sample, Fezai et al. [13] used the method of kernel principal component analysis to select the first kernel principal component of the fault sample and classified the fault through random forest. Kouadri et al. [14] combined hidden Markov model with principal component analysis. Principal component analysis is used to complete feature extraction and hidden Markov model is used to l fault detection. The effectiveness of the method is verified based on different performance indexes.
With the development of AI, more and more deep learning algorithms are used to extract fault features and diagnose fault patterns. Usually, the original fault samples collected by experiments are time-domain signals. When the fault occurs, the frequency structure of the signal often changes, the change is not obvious in the time domain. Therefore, many scholars integrate time-frequency conversion into machine learning. Zhang et al. [15] divides fault samples into different physical fictions by local mean decomposition and selects the physical fictions which can best reflect fault characteristics in matrix entropy based on Euclidean distance. Finally, one-dimensional convolutional neural network is used to identify fault types. Kumar et al. [16] aimed at different output voltage waveforms under different switch fault conditions, extracted the significant frequency domain characteristics of output voltage signal by using fast Fourier technology and combined with artificial neural network to realize fault diagnosis. Christos et al. [17] used short-time Fourier transform technology to represent the time-frequency of vibration image for fault data, and extracts image classification transformer from transformer processed by natural language for identifying vibration image. Yao et al. [18] used particle swarm optimization algorithm to automatically determine the window size of short-time Fourier transform and used CNN which was also optimized by PSO to identify the fault mode of time-frequency diagram. However, the window function of STFT is fixed, so the time-frequency resolution is poor. At the same time, there are high requirements for the processed signal, but the actual collected signal is difficult to meet the requirements.
In order to consider the influence of different factors on fault signal at the same time, continuous wavelet transform is selected to process current signal, which also overcomes the problem of poor time-frequency analysis of STFT. The AlexNet structure of convolutional neural network is used to adaptively extract the deep fault information in the time-frequency diagram to prevent the complexity of artificial feature extraction. Finally, softmax classifier is employed for fault detection. Compared with 1D-CNN, 2D-CNN based on FFT and 2D-CNN based on STFT, the effectiveness of this method for fault pattern recognition of three-phase full bridge inverter is verified.
Theoretical background
Continuous wavelet transform
The principle of Wavelet Transform(WT) is similar to that of Fourier Transform(FT) [19]. But in Fourier analysis, complex time or space signals are converted to frequency domain. The relatively simple spectrum characteristics are used to analyze and find the fault characteristics of the original signal, which loses the data information of the time-domain signal in the original fault data. In order to solve this problem, Short-Time Fourier transform (STFT), also known as window Fourier transform, is proposed, which is defined as:
Where h(t) is the input signal, g(t) is the window function. Because its frequency spectrum is calculated by sliding window, the resolution of time-frequency analysis is limited by Hesienberg uncertainty criterion [20]. When STFT is used for time-frequency analysis, the window function cannot be changed, resulting in the time and frequency cannot be optimized at the same time [21]. Wavelet transform develops the localization of short-time Fourier transform and overcomes the disadvantage that the window size does not change with frequency. Chakraborty et al. [17] applied WT to time-frequency analysis. Wavelet is actually a waveform that limits the time period, which function is defined as:
Where a is the scaling parameter, which determines the scaling degree of the mother wavelet. b is the moving parameter, which determines the position of the mother wavelet. Wavelet function satisfies:
Where
The inverse transformation is defined as:
According to different parameters a and b, the wavelet coefficients are generated and arranged in order. Not only the frequency components of the original signal can be obtained, but also the time-frequency spectrum of the wavelet transform can be obtained corresponding to its specific location in the time-domain.
Convolutional neural network has been widely used in image processing, speech recognition and other fields. AlexNet is chosen as the model of this paper, compared with the traditional CNN (Lenet-5 [22]), it has a deeper network structure. ReLU activation function is used to replace the original sigmoid function and Dropout is added to the full connection layer to prevent over fitting [23]. The network structure of AlexNet is shown in Fig. 1.
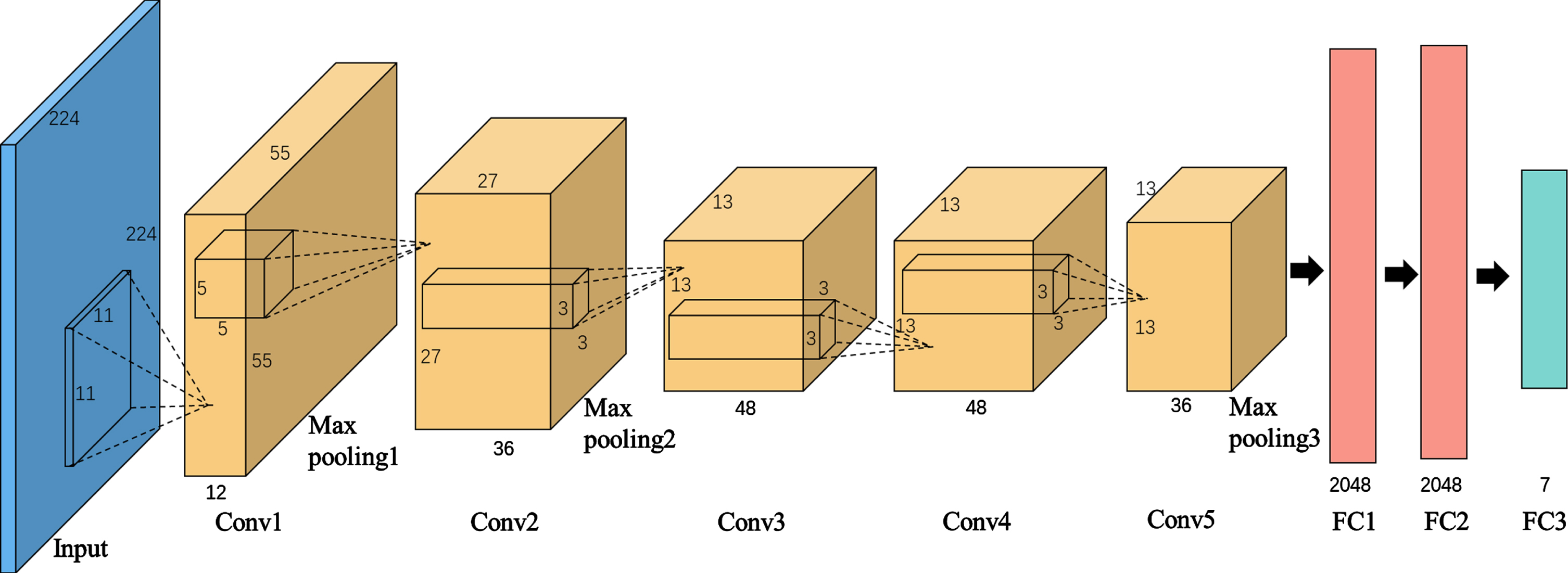
The structure of AlexNet Network.
As shown in Fig. 1, AlexNet consists of five convolution layers, three max pooling layers and three fully connected layers. The convolution layer learns the input matrix locally by convolution kernel, which can be expressed as follows:
The task of pooling layer is to further extract features, and reduce the amount of calculation by compressing the dimensions of the previous layer. It is mainly divided into max pooling and average pooling. The maximum pooling method with stronger sparse feature extraction ability is selected in this model. The expression is as follows:
After the input image is processed alternately by multiple convolution layers and pooling layers, the local information with class differentiation in the extracted low dimensional features is integrated by the fully connected layer network and input to the target classification layer for classification. The definition of full connection layer is as follows:
In this paper, a fault identification method of power electronic converter based on CWT and CNN under different conditions and different sample ratio is proposed. The flow chart of the proposed method is shown in Fig. 2 and the procedures are summarized as follows:

Fault diagnosis flowchart of the proposed method.
Collecting three-phase current signals i
a
, i
b
, i
c
of DC-AC inverter circuit under different working conditions as fault signals. Continuous wavelet transform is used to transform one-dimensional time-domain signal into two-dimensional time-frequency diagram. The three-phase fault signal is spliced into a picture, and the picture is compressed as the input of AlexNet. The fault samples are divided into different proportion of testing samples and training samples for network performance test. The training samples are input into AlexNet for autonomous learning and the network weight and bias are adjusted by back propagation. The testing samples are input into the trained AlexNet to calculate the fault pattern recognition accuracy of electronic converter under different working conditions and different sample ratios.
The main contributions of this paper can be summarized as follows: The continuous wavelet transform is used to process the fault information. The changes of time-domain and frequency-domain are considered at the same time. AlexNet with deeper network structure is selected and Dropout layer is added to prevent overfitting. The model proposed in this paper achieves ideal results under different working conditions and different sample ratios.
Data acquisition
The experimental platform is shown in Fig. 3. The parameters of Brushless DC motor are shown in Table 1. It can be seen from the three-phase full bridge inverter circuit in Fig. 2. There are six switches T1-T6 in the circuit. The single open fault mode of six switches are dis-cussed in this paper, including a total of seven failure modes in the normal working state. In the experiment, the driving signal is controlled by computer to simulate the open circuit fault of different switches. Similarly, the load of BLDCM is changed by software. The fan speed is 550 rad / min, 650 rad / min and 750 rad / min. Three load conditions are labeled as LC1, LC2 and LC3. At the same time, A, B, C three-phase current signals are collected under different switch fault conditions and different working conditions.

The experimental platform for TFI fault diagnosis.
The parameters of Brushless DC motor
Different failure modes correspond to a special vibration signal waveform, and also to a specific time-frequency diagram. In this paper, the basic wavelet is CMOR wavelet, which is the abbreviation of complex wavelet Morlet, it is defined as:
Where Fb is the bandwidth factor, Fc is the center frequency factor. CMOR wavelet can adjust the precision of time-frequency analysis by changing Fb and Fc. The time-domain and frequency-domain forms of CMOR wavelet have some properties of Gaussian function and can decompose the target signal adaptively. The accuracy of CMOR wavelet time-frequency analysis has the following relation under Heisenberg uncertainty theorem:
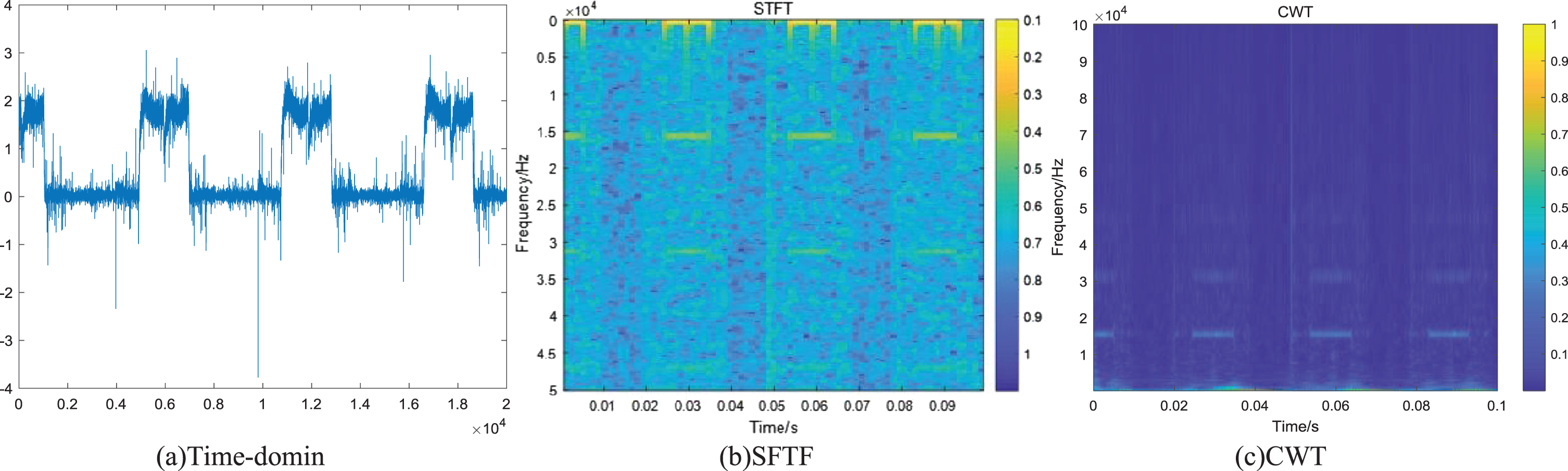
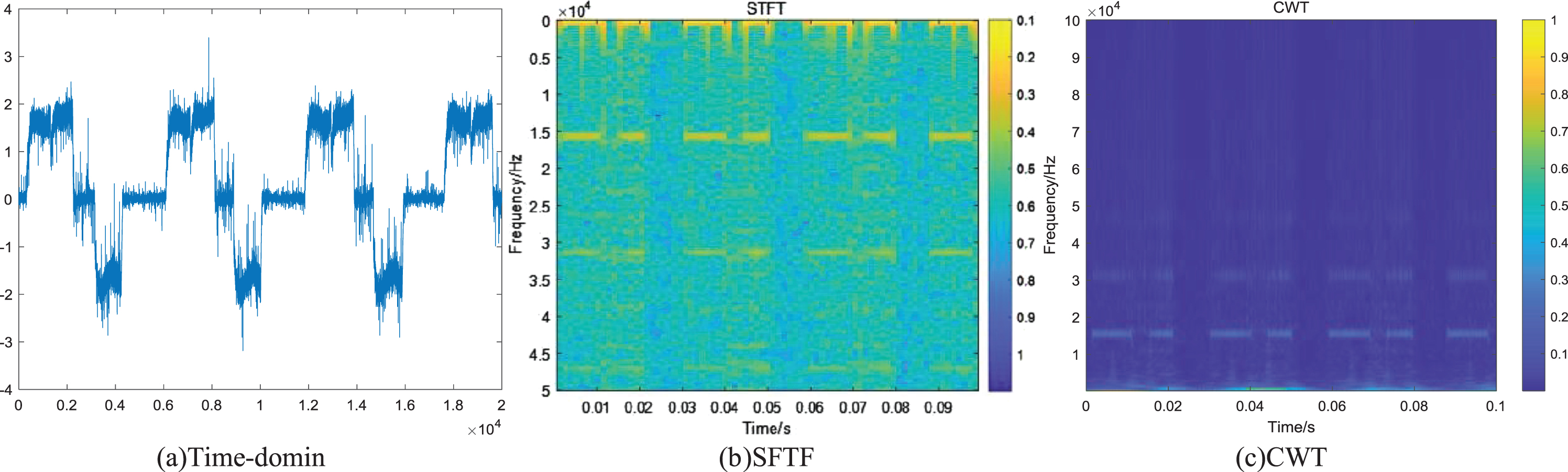
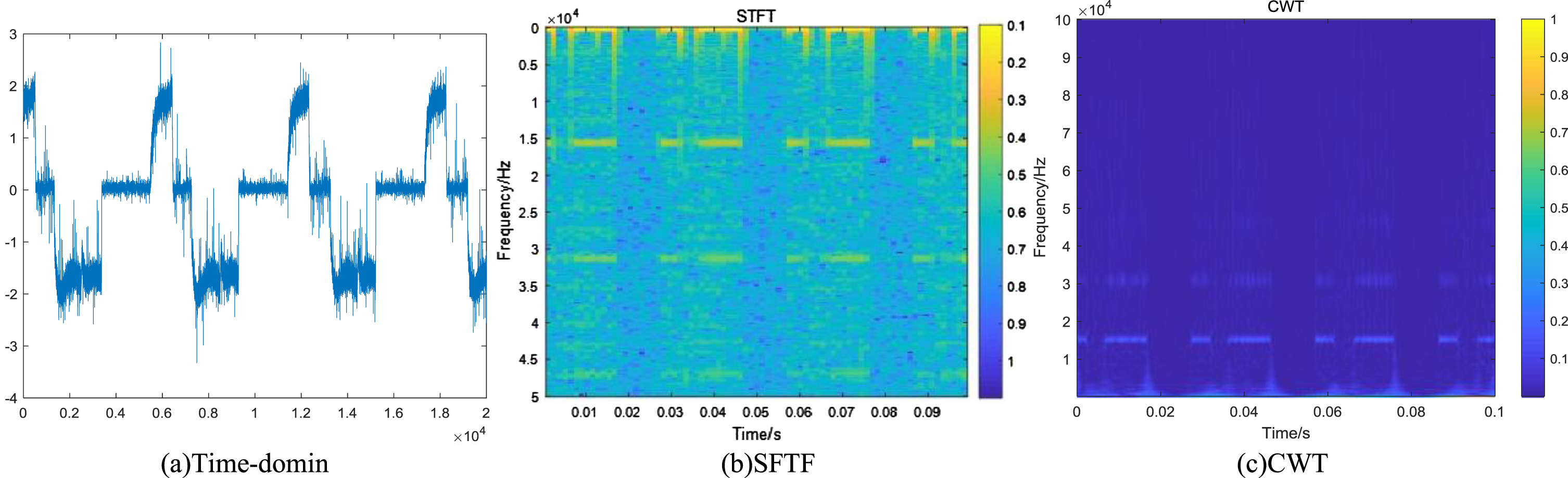
Where f i is the signal analysis frequency, Δf i is the frequency resolution. Δt i is the time resolution. The above formula shows that the time-frequency analysis precision of wavelet can be adjusted by changing the center frequency Fc of wavelet. The time-domain signal of three-phase current is transformed by short-time Fourier transform and wavelet transform to get the fault time-frequency diagram. The time-frequency diagram of i a under different failure modes is shown in Figs. 4–10.
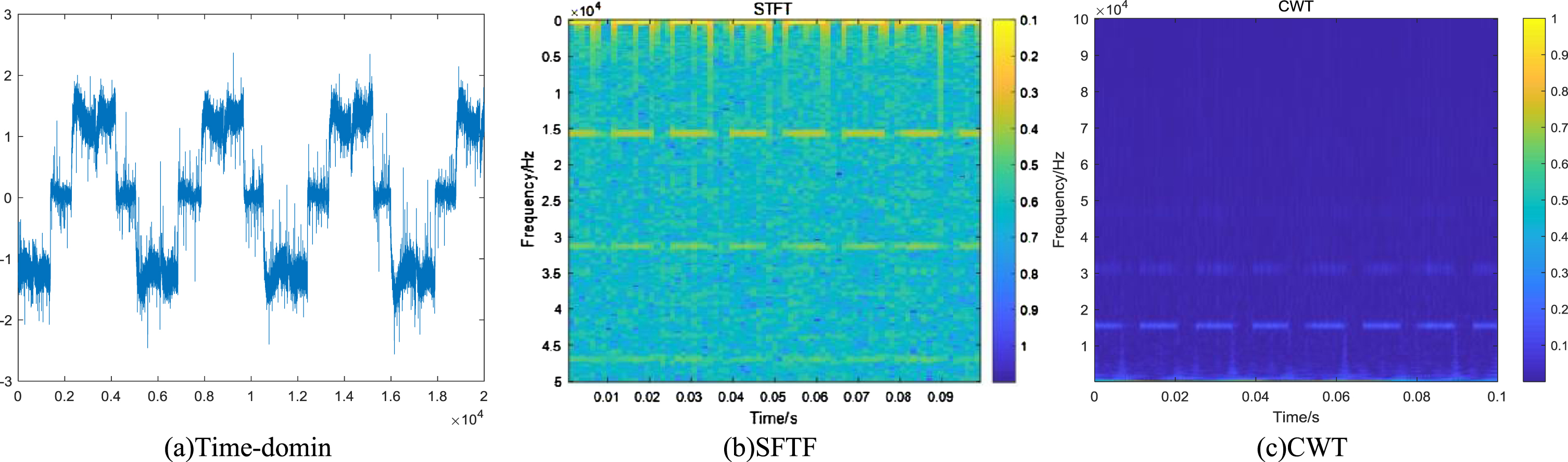
The current signal of i a when TFI under normal mode.

The current signal of i a when TFI under T1 open circuit.
The current signal of i a when TFI under T2 open circuit.
The current signal of i a when TFI under T3 open circuit.

The current signal of i a when TFI under T4 open circuit.

The current signal of i a when TFI under T5 open circuit.
The current signal of i a when TFI under T6 open circuit.
It can be seen from Figs. 4–10 that when different power switches fail, the time-domain signal of the current will change, and the characteristics in the corresponding time-frequency diagram will also change. When the current signal is transformed by SFTF, the window function is fixed, which leads to inaccurate analysis in frequency-domain or time-domain and low resolution. Moreover, the analysis of abrupt signal or non-stationary signal has limitations, which cannot reflect the abrupt characteristics of signal sensitively. Wavelet transform decomposes the signal in multi-scale by scaling and translation operation, which can effectively obtain all kinds of time-frequency information from the signal. It has better localization property in time-domain and frequency-domain at the same time and has multi-resolution analysis characteristics.
In order to make the time-frequency characteristic image as the input of convolutional neural network, further image processing is needed. Firstly, the coordinates and labels of time-frequency map should be removed. Because the fault characteristic correlation between three-phase current is needed to be studied, the time-frequency diagram of three-phase current is spliced into the same diagram. Finally, in order to make the image conform to the input size of AlexNet, the image is compressed by network normalization. The specific process is shown in Fig. 11. The processed fault sample data set is divided into different proportion of training samples and testing samples. The specific situation is shown in Table 2.
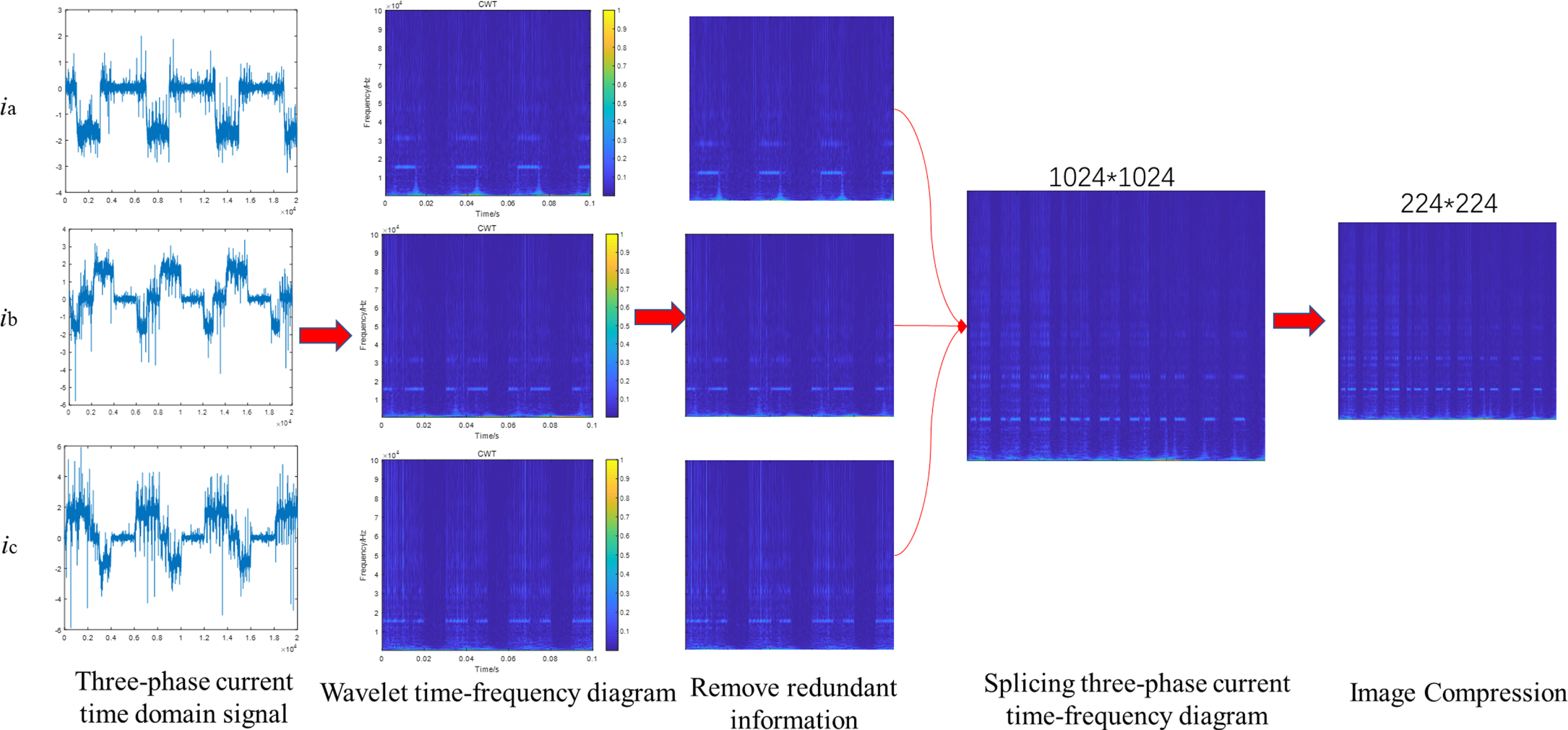
Preprocessing of fault sample data.
Division of different proportion samples
The structural parameters of the AlexNet model are shown in Table 3 and the training parameters are shown in Table 4. In order to increase the training speed of the model, the number of convolution kernel is one fourth of the classical AlexNet model [23].
Structural parameters of AlexNet
Structural parameters of AlexNet
Training parameters of AlexNet
According to the paper [24], the learning rate of Adam optimizer is usually 0.001. The loss curve and accuracy curve of the model are shown in Fig. 12, and the feasibility of the model parameters is verified.
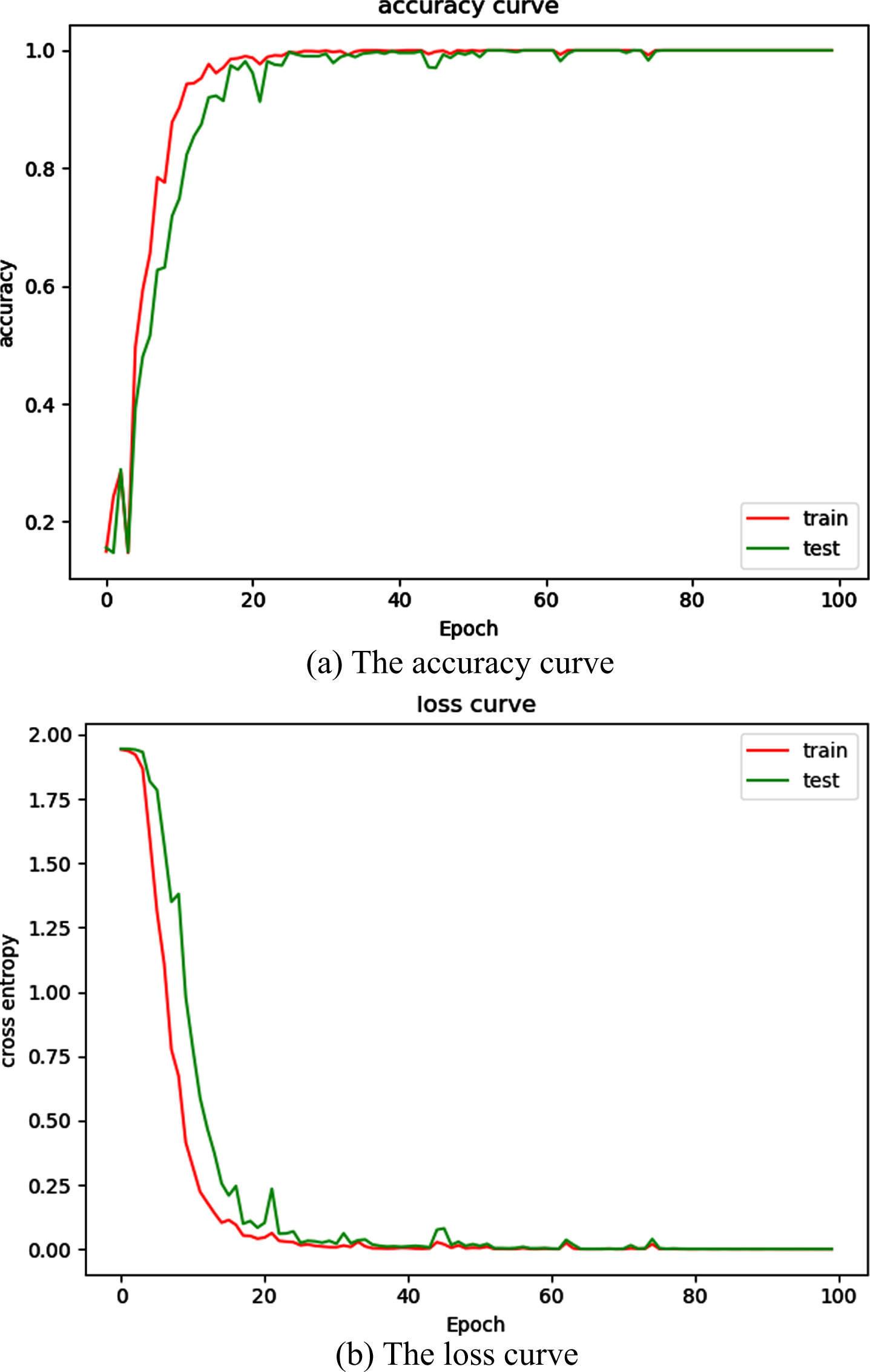
Training curve of AlexNet.
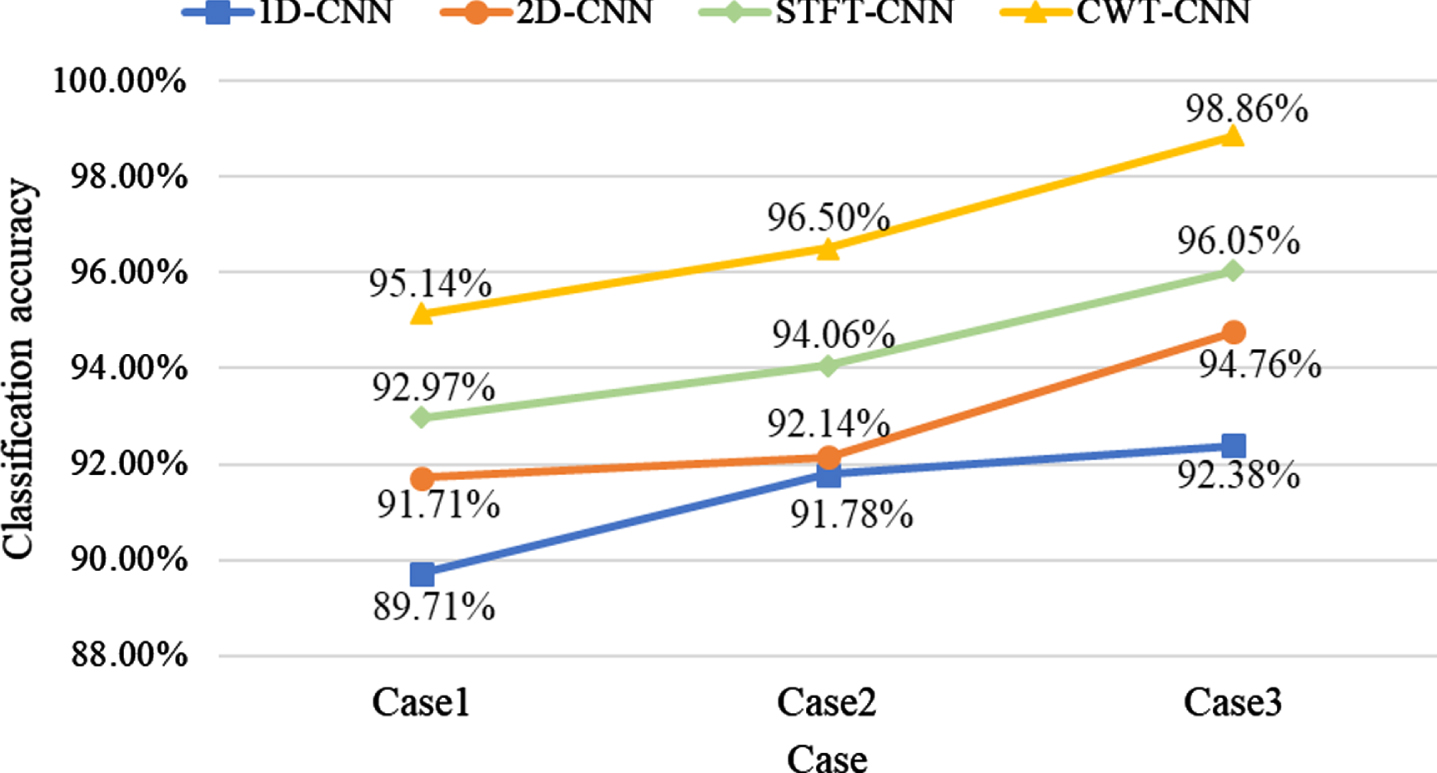
According to 4.2, the sample proportion is divided into three cases. The fault diagnosis results of 1D-CNN, 2D-CNN, STFT-CNN and CWT-CNN are tested respectively. When the load condition is LC1. The fault diagnosis confusion matrix of CWT-CNN is shown in Fig. 13. The comparison results of the four networks are shown in Fig. 14. The duration of fault diagnosis of different models is shown in Table 5. As shown in Fig. 14, when the input data is one-dimensional frequency-domain signal, the fault diagnosis accuracy reaches more than 89.71%, which reflects the strong feature extraction ability of convolutional neural network. However, when the input signal is one-dimensional data, the size of convolution kernel is one-dimensional, which leads to the smaller receptive field of feature extraction. Moreover, one-dimensional fault data cannot express the spatial information of fault, so the accuracy of fault diagnosis is lower than that of two-dimensional convolution neural network. When the two-dimensional matrix is used as the network input, the fault diagnosis accuracy is above 91.71%, but the fault samples only processed by FFT have only the main frequency-domain fault information. The time-domain information of auxiliary judgment is missing. The time-domain information of fault samples is increased by using STFT processed data. The diagnostic accuracy reaches more than 92.97%. However, due to the fixed window function, the frequency or time domain analysis is not accurate enough, resulting in low resolution, which makes the diagnostic accuracy difficult to improve.
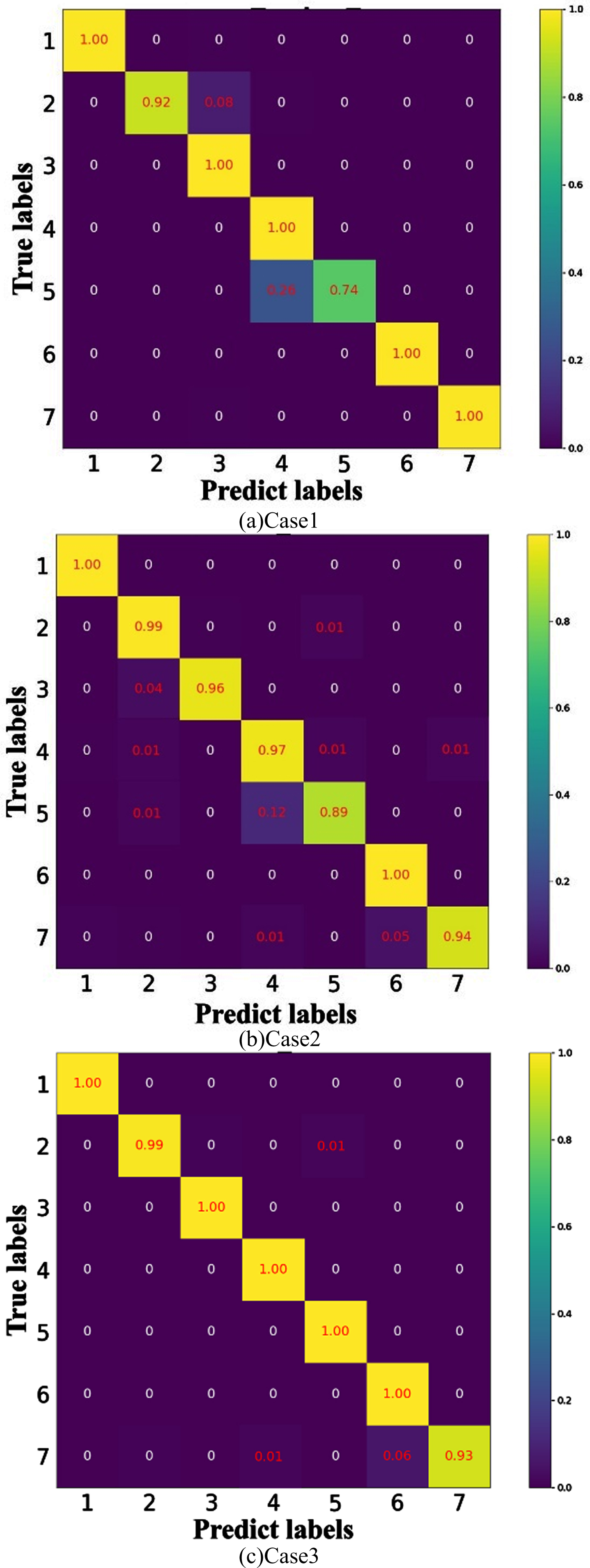
Confusion matrix of CWT-CNN under LC1.
Fault diagnosis results under different cases.
The duration of fault diagnosis of different models
It can be seen from Fig. 13. The data processed by CWT uses variable basis wavelet to solve the problem of low analysis accuracy and the accuracy rate reaches more than 95.14% under the three sample ratios, which is obviously better than other comparison networks.
The changing trend of the four experimental networks is the same under different sample proportion. In Case1, the training samples are not enough, the network performance has not been trained to the best, and then input the same number of test samples, resulting in the overall classification accuracy is not ideal. In Case3, when the number of training samples increases and the testing samples is small, the accuracy of fault diagnosis reaches the best results.
It can be seen from Table 5. In Case1, the number of training samples is small and the network training time is the shortest, resulting in the low accuracy of fault diagnosis. In case3, the network takes longer time to train network parameters and achieves better fault classification accuracy. The fault diagnosis time of 2D-CNN is the shortest. Compared with 1D-CNN, due to the size of convolution kernel, the speed of computer processing two-dimensional matrix is lower than one-dimensional data. STFT-CNN and CWT-CNN take a long time because the computer needs to process the pictures into matrix form first, but CWT-CNN has the highest fault diagnosis accuracy.
Fault detection experiment under different working conditions
Experiment 4.4 shows that the network fault diagnosis effect is the best in Case3. Therefore, test the fault diagnosis accuracy of 1D-CNN, 2D-CNN, STFT-CNN and CWT-CNN in Case3. The fault diagnosis confusion matrix of CWT-CNN is shown in Fig. 15. Figure 16 shows the accuracy comparison of four networks under different loads
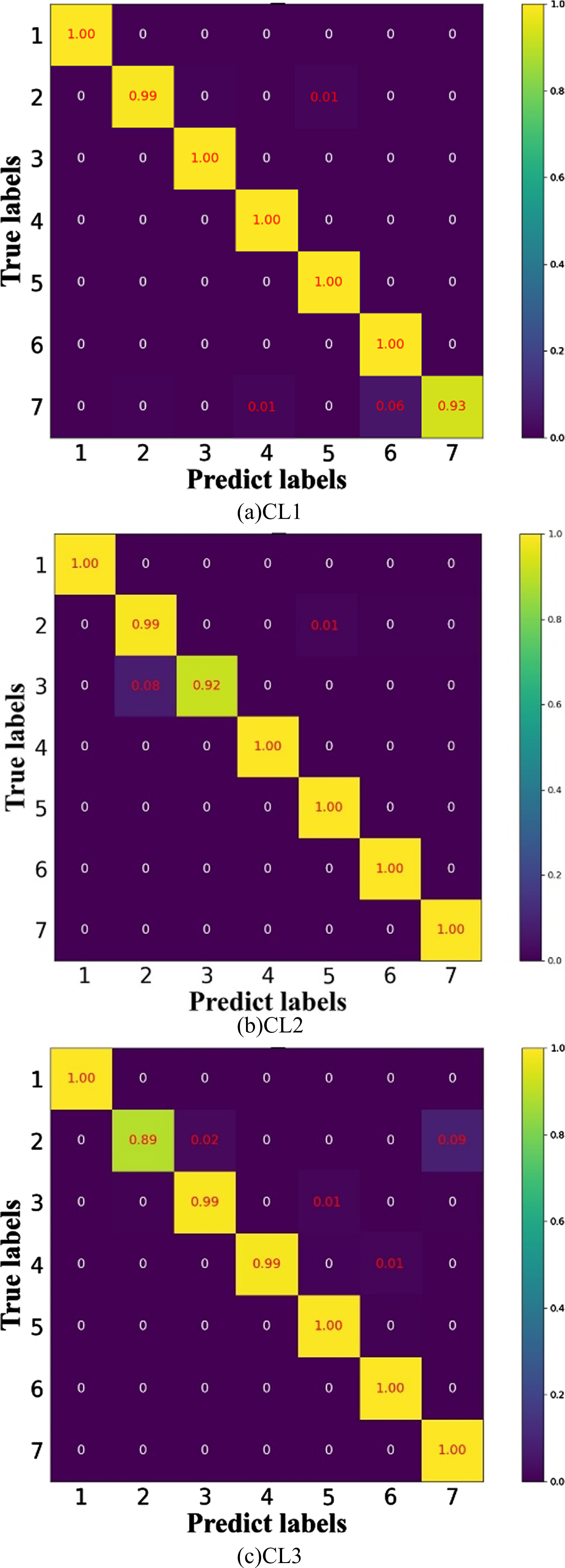
Confusion matrix of CWT-CNN under different conditions.
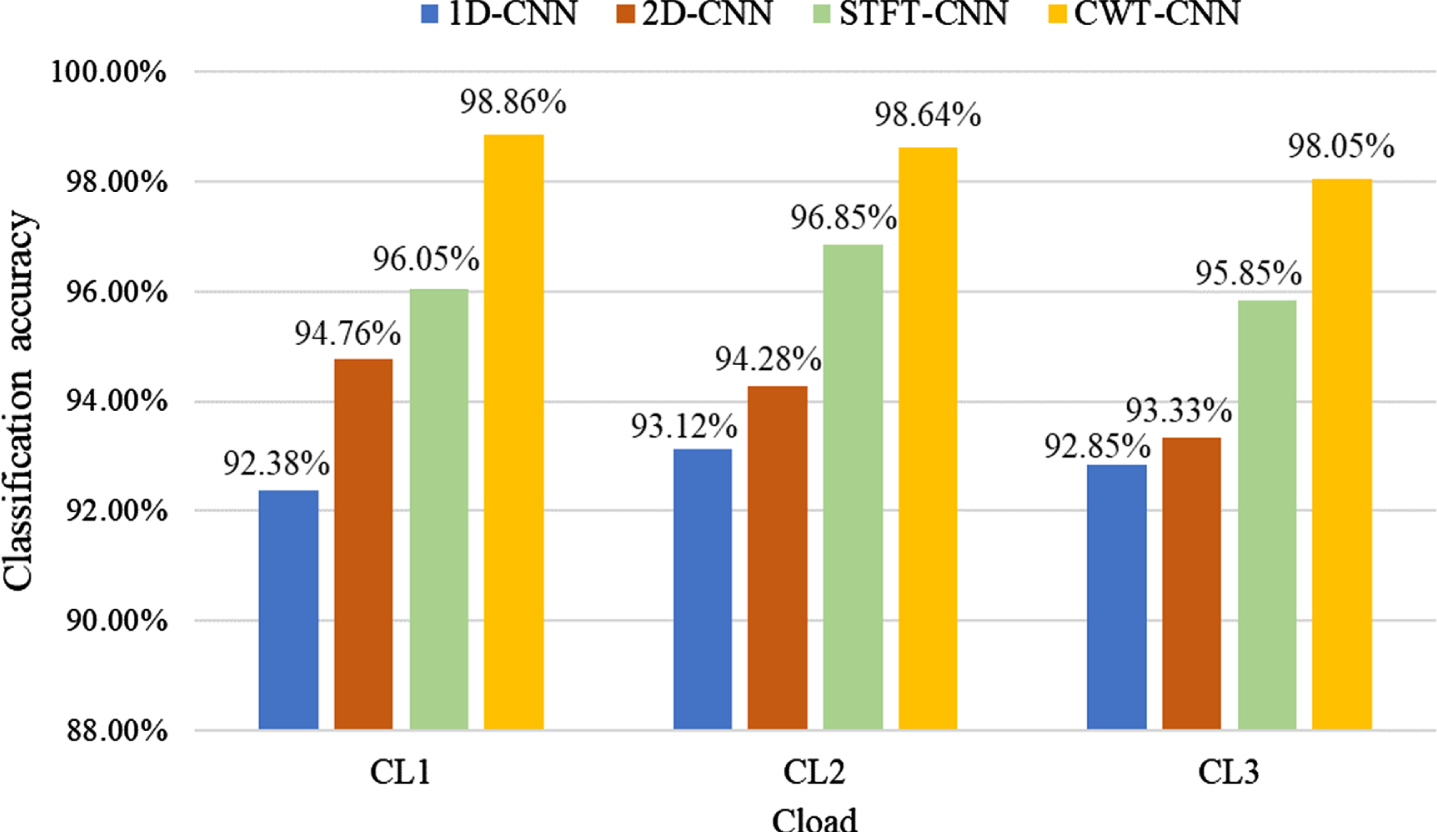
Fault diagnosis results under different loads.
According to Fig. 16, in Case 3, the fault recognition accuracy of all network experiments reaches more than 92%, but the recognition accuracy of CL3 is slightly lower than that of other load cases, because at lower speed, the fault samples contain more noise information, which will affect the feature extraction effect of convolutional neural network, resulting in the decline of classification accuracy.
Figure 15 illustrates that the fault diagnosis results based on CWT-CNN can obtain the accuracy above 98% under three different working conditions, just only few faults samples are misclassified. The classification effect of the proposed method is obviously better than that of the comparison network. Moreover, it is proved that the CWT-CNN model for power electronic converters can get ascendant generalization ability.
In this paper, a method based on continuous wavelet transform and convolution neural network is proposed to solve the open circuit fault of electronic converter in Brushless DC motor drive system. The three-phase current signal is taken as fault signal. The time-frequency spectrum of the three-phase current signal is processed by continuous wavelet transform in time-domain. The time-domain and frequency-domain are used as reference information for fault location at the same time. The AlexNet model of convolutional neural network is used to adaptively extract the fault features in time-frequency diagram. Finally, The softmax is used for fault detection. Compared with 1D-CNN, 2D-CNN and STFT-CNN, the summary is as follows: In the case of different sample ratio, the fault detection accuracy of CWT-CNN is more than 95%. Compared with the conventional convolutional neural network, CWT-CNN can consider the fault information of three-phase current signal in time-domain and frequency-domain at the same time to improve the accuracy of fault detection. Compared with STFT-CNN, CWT-CNN has better resolution in the low frequency segment with obvious fault features, which is conducive to network feature extraction. Under different working conditions, the accuracy of CWT-CNN fault detection reaches more than 98% in Case3, which is the best network training standard, which verifies the robustness of the network.
The experimental results show that wavelet transform can better represent the time-domain information and frequency-domain information of fault signal in time-frequency diagram. Combined with convolution neural network with adaptive extraction ability, it is conducive to better extract the feature information of fault samples and achieve efficient fault detection. The effectiveness of this model not only prepares for fault tolerance, but also benefits the PHM of the motor drive system.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61901212), the Natural Science Foundation of the Jiangsu Higher Education Institutions of China (19KJB510032, 20KJA510007), the Open Research Fund of Jiangsu Collaborative Innovation Center for Smart Distribution Network (No. XTCX201909), The Scientific Research Foundation for the High-Level Personnel of NJIT(YKJ201916).
Conflict of interest statement
On behalf of all authors, the corresponding author states that there is no conflict of interest.