
Abstract
In the field of mobile robot decision making and control, path planning is an essential element as it defines the performance of the design. It is one of the hot topics in artificial intelligence and researchers pay more attention to develop an efficient model. The key requirements that must be considered while designing a navigational system for mobile robots are origin point, obstacles, destination point, path planning, and realistic decision mechanism. However, conventional systems have limitations as slow response, long planning, large turns, and unsafe factors. Aiming at the problems, this research work presents a hybrid optimized path planning model for a mobile robot. Improved particle swarm optimization and Modified Whale optimization models are incorporated as a hybrid multi-objective approach to obtain the shortest, smoothest, and safest path for a mobile robot. Experimental results demonstrate that the proposed hybrid optimization model is suitable for mobile robot navigation for dynamic environments by obtaining a shorter, smoother, and safer path than existing algorithms.
Keywords
Introduction
The navigation system of mobile robots eventually designed to reach the destination from the source avoiding the obstacles in the path. Navigation system should balance the constraints like energy, distance and time. Using four distinct modules the processes in the navigation system are defined. Extracting the required information using sensors is the first module. Decision to move into the environment from its position is the second module. Path planning to reach the destination by avoiding obstacles is the third module. Motion adjustment to generate the required trajectory of the path is the fourth module. Generally, the path planning of mobile robots includes a sequence of rotation and translation to reach the destination without colliding an obstacle [1]. The recent trend in automation and intelligent mobile robot applications pay more attention to path planning which is essential for various domains like rescue missions, nuclear facilities, space exploration. Automated industrial environments consider the path optimization in product scheduling, etc. [2],
Basically, path planning is quite different from motion planning. Path planning must consider the dynamics to model the environment and obtains an optimal path of motion with minimum time. Path optimization considers certain performance metrics such as distance, time and energy to generate a collision free optimal path from source to target. Minimum computation time, shortest and safest path are the major concern of path optimization [3]. Researchers develop numerous path optimization techniques for mobile robots and still, it is considered as one of the challenging tasks among the community. The path planning of existing techniques is mainly categorized into two types as classical path planning and heuristic path planning [4]. Figure 1 depicts the categorization of path planning techniques.
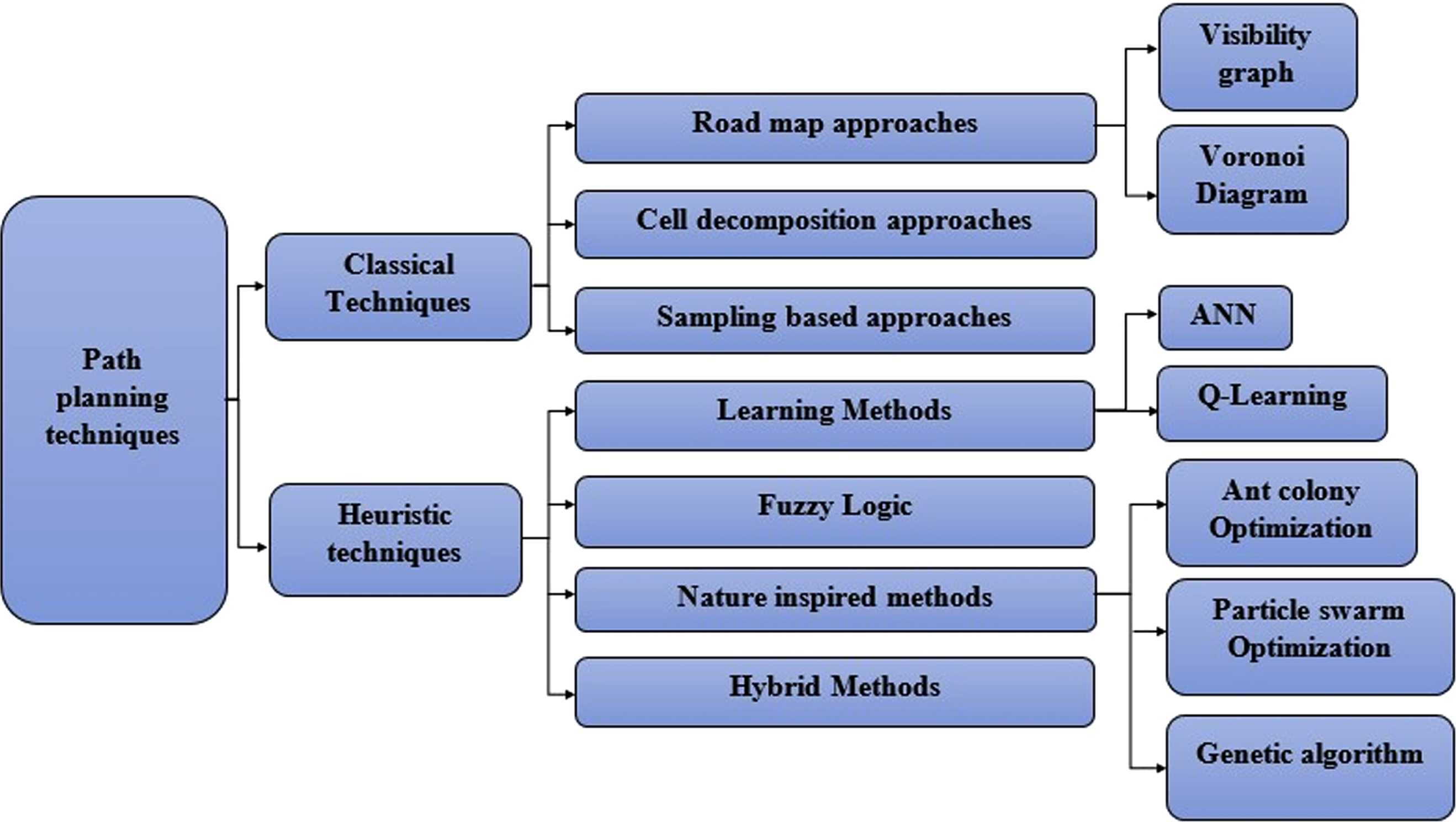
Path planning techniques.
The classical techniques include road map approaches, cell decomposition, sampling based approaches, potential field method [5–7]. They identify the path using a set of defined steps. Based on the predefined actions suitable path has been selected in the classical techniques. Only deterministic actions are allowed in the classical methods. However, the performance of classical techniques gets reduced due to high time complexity, computation cost, lags in performance while handling large dimensions, trapped into local minima, etc. Later heuristic techniques are involved to obtain precise solution. Heuristic techniques are categorized into learning methods, fuzzy logic, nature inspired optimization models and hybrid models. Among all, optimization models are widely used for optimal path planning. Genetic algorithm [8], Particle swarm optimization [9], Dragonfly Algorithm [10], Ant colony optimization [11], firefly algorithm [12], Adaptive collaborative ant colony optimization [13], woodpecker optimization [14] are few familiar techniques used in various research works. However, these optimization techniques have their own limitation as high computation complexity, low affinity accuracy and long search time. To overcome this issue in optimal path planning, hybrid techniques are introduced that combines one or more techniques to overcome the existing difficulties.
The objective of this research work is to obtain an optimal path for mobile robot in a dynamic environment. The collision free path planning model should avoid obstacles in the environment and reach the target with reduced computational complexity, cost and time. Hybrid optimization approach is considered for a dynamic environment where the obstacles positions are changed frequency over time to emphasize the collision free navigation of mobile robot. Shorter and smoother path by avoiding sharp turns and jerks is necessary for industrial robots. Hybrid optimization model must provide smoother paths balancing the safety constraints to ensure that the robot does not collide with any of the obstacles in the dynamic environment.
Optimal path identification, obstacle free path planning, collision avoidance systems are considered for literature analysis. Various traditional to recent optimization techniques in existing research works are analyzed to discuss the process flow and features. Spherical algorithm and homotopy continuation method for autonomous and semiautonomous robots reported in [15] performs better than sampling-based path planning models. The homotopy method is used for path planning and path tracking is achieved using spherical algorithm. The simple model is efficient for linear obstacles and its performance gets reduced for dynamic environment. The spherical algorithm is further improved to enhance the autonomous robot performance in a dynamic environment using fuzzy logic [16]. The motion model, debugging of sensors are performed using multi sensor fusion technology and a fuzzy controller is used to define the spherical mobile robots.
Obstacle guided path refinement algorithm reported in [17] provides a collision free path based on the obstacles exist in the environment. The collaboration between mobile robot and quad-copter is attained to stream the live images of the environment in the path planning process. Though the performance is better the path planning time and response time is high due to image processing techniques. An incremental moving target path planning model reported in [18] performs path reconfiguration based on the obstacle movements in the environment. This quick planning methodology sacrifices the optimal parameters in order to reduce the computation complexity. Though the system provides better path but due to continuous reconfiguration of paths, the path stability gets affected.
Neural networks for mobile robot path planning is addressed in few research works. The neural network model reported in [19] provides path planning for autonomous underwater vehicle as glasius bio-inspired neural network. The simple and efficient model eliminates the issues on traditional neural network and grid map methods and obtains high efficiency. The machine learning model based path planning algorithm reported in [20] provides optimal path for mobile robots in a dynamic environment. The Risk based Dual Tree Rapidly Exploring Random Tree model utilizes the random tree model for generating heuristic trajectory. Similar random tree based path planning reported in [21] provides a hierarchical framework to obtain heuristic trajectory for dynamic environment. The elastic band based rapidly exploring random tree model includes dynamic re-planning process to update the obstacles contraction and repulsive force. This process optimizes the heuristic trajectory and provides better path planning performance in dynamic environment. Other than machine learning models, few research works employ deep learning techniques for path planning. Reinforcement learning [22], convolution neural networks [23] for obstacle detection and path planning in static and dynamic environments.
Hybrid models are recently employed in mobile robot path planning process. Few familiar optimization models listed in the introduction section are combined with machine learning models to achieve better performance in path planning. Apart from traditional methods, few intermittent hybrid models are introduced as hybrid technique for mobile robot path optimization. The hybrid model reported in [24] identifies the optimal parameters to generate a safe and smooth path using membrane pseudo-bacterial potential field. Pseudo bacterial genetic algorithm and membrane computing are hybridized to provide paths for mobile robots. Improved execution time is the major merit of the hybrid model which is obtained for dynamic environment. The hybrid model reported in [25] combines SIFT and RANSAC algorithms for mobile robot path planning. The hybrid approach utilizes coordinate space of orthogonal map for robot path tracking along with predefined route. Robustness and accuracy are the major merits of the presented hybrid model. Multi-robot path planning issues in grids and automated industries are analyzed in [26] as diversified-path database-driven multi-robot path planning model. Optimal solution database and path diversification are achieved through the database driven model which eliminates the frequent re-planning in the planning process. High scalability and optimal solution are the merits of data driven path planning model.
Various nature-inspired optimization algorithms have been introduced so far to obtain optimal solutions for complex issues in real world applications. A woodpecker mating algorithm reported in [27–32] has been developed based on the mating behavior of woodpeckers. Simple process, addressing hard complex issues, highly efficient and global optimality are the major merits of the woodpecker optimization algorithm. However, the optimization lags in non-convex problems, long search time and inseparable issues, which are considered as limitations of the optimization model. Recently, an improved version of woodpecker optimization was reported in [33] to increase the exploration and exploitation abilities of the optimization model. The distance opposition-based learning mechanism used in the first phase increases diversity, exploration and convergence. The local memory of search agents improves the exploitation abilities and the self-regulatory mechanism improves the performance of the running away function. The multilayer perceptron neural network model is used to classify the optimal features and provide a solution for the complex optimization issues. Hybrid since the cosine woodpecker optimization algorithm reported in [34] improves the exploitation ability of the optimization function. However, it lags in performance due to exploration, consequently to improve the exploitation ability, woodpecker optimization exploration capability and levy flight are utilized along with local search memory. Particle swarm optimization with firefly algorithm population reduction reported in [35–39]. The modified hierarchical PSO model with dynamic accelerating coefficients reduces the transmission losses, limits the ramp rates and other value point effects on dispatch. Better optimal solutions for non-smooth dispatch units are the merits of the research model.
From the above literature analysis, it is observed that computation time of conventional techniques is high and fails to obtain optimal path. Processing unnecessary points increases the computation time and decreases the accuracy. Moreover, the considered environments are static and simple. Path planning for complex environment is a challenging process for conventional techniques. As the complexity increases, computation time for path planning was increases exponentially and this leads into NP-hard. Heuristic methods perform random operations to obtain a set of solutions for each iteration. All these solutions are combined, replaced and selected for path planning which increases the computation time. So it is essential to reduce the variations in the solution before the planning process. The observed limitations are considered as research motivation and this research work presents an optimal path planning model for mobile robots using hybrid optimization techniques in a dynamic environment.
In this research work, a hybrid optimization algorithm is presented using particle swarm optimization and whale optimization algorithms. Slower convergence and difficulties in generating optimal solutions due to local optimal issue in the conventional particle swarm optimization is improved by introducing modifications in the particle parameters. Similarly, modified whale optimization is incorporated as a collision avoidance system in the path planning process. Compared to other optimization algorithms, particle swarm optimization and whale optimization algorithms provides better stability and high convergence accuracy.
The major contribution of this research work is summarized as follows. Novel heuristic nature inspired algorithm is presented by hybridizing Improved Particle Swarm Optimization and Modified Whale Optimization as IPSO-MWO algorithm. Path planning is achieved using an improved particle swarm optimization technique which includes shortest path identification and ensures path smoothness. Obstacle avoidance is achieved using modified whale optimization technique which analyzes the sensor data and triggers the rerouting process in IPSO.
The rest of the article is summarized as follows: The proposed path planning model using hybrid optimization technique is presented in Section 2. Simulation analysis and its performance analysis are demonstrated in Section 3. The observations and features of the proposed hybrid optimized path planning model is concluded in Section 4.
The proposed path planning model includes two phases. The first phase provides an optimal path and ensures the path smoothness using improved particle swarm optimization. The second phase provides an obstacle avoidance system that analyses the sensor data and triggers rerouting so that collision is avoided. The traditional particle swarm optimization algorithm was formulated by observing the behavior of birds and fish. The swarm algorithm is robust, simple and efficient to obtain optimal solutions for complex search spaces. It uses a set of particles to solve the optimization problem. For every iteration, the position of the particle is updated and moved towards the optimal solution. This process is performed by comparing each particle solution with global solution.
Let us consider the population size is M. The position and velocity of each particle are represented based on the coordinates in the search space. The position and velocity vector of nth particle is represented as
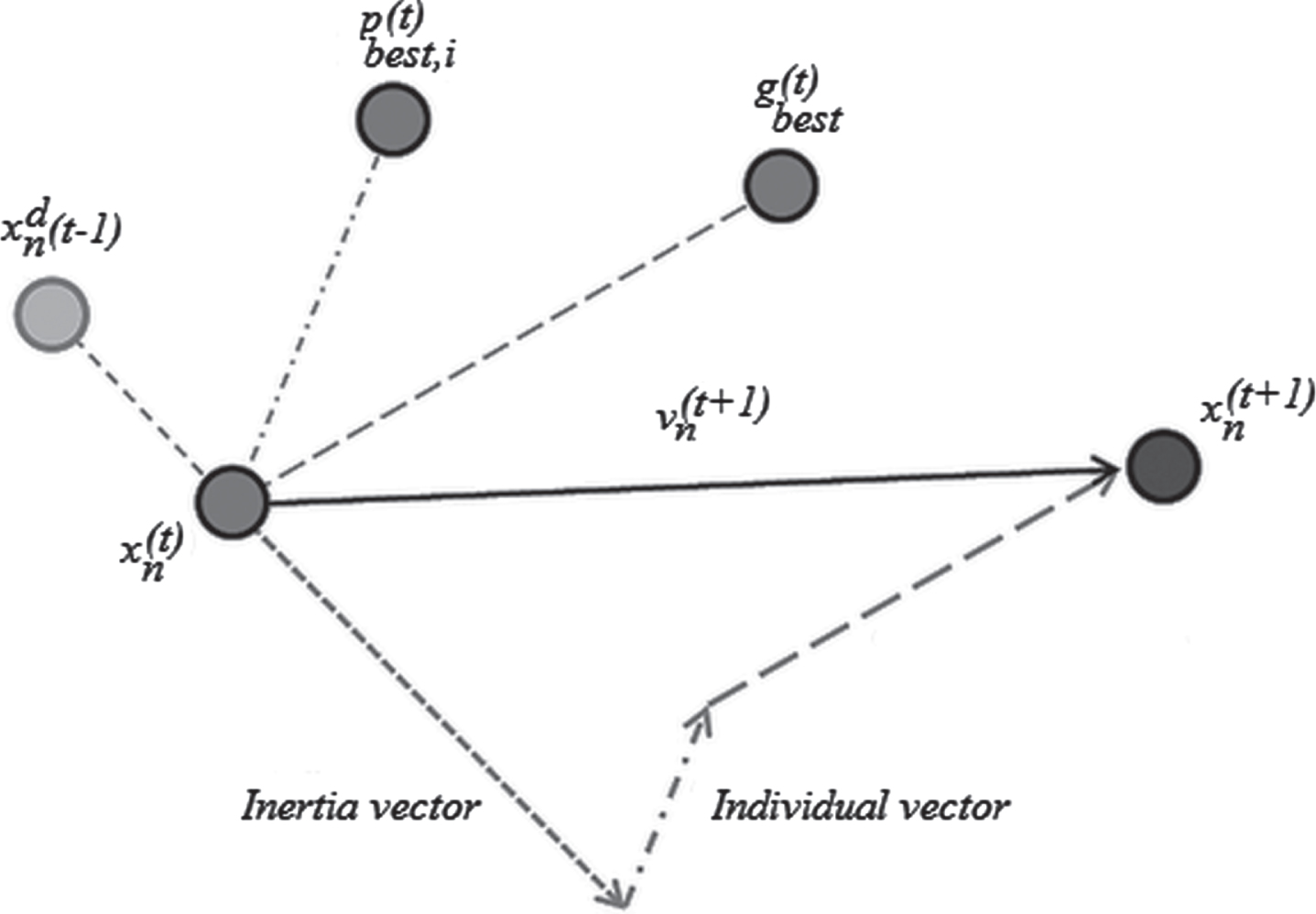
Particle swarm optimization.
The best position of the nth particle is represented as
The traditional particle swarm optimization lags in performance due to external parameter dependency such as acceleration parameter and inertia weight. Slower convergence rate and difficulty in generating optimal solution are the major drawbacks of traditional particle swarm optimization model. Due to this, the efficiency of the system gets reduced drastically. In order to improve the path planning few modifications are performed in the improved particle swarm optimization model. In order to obtain the optimal solution, the particle parameters are optimized.
The running time of mobile robot for each interval is represented as t1, t2,..t
y
and the time particle parameters are given as fitness function δ (t) is given as a
Based on the above function the fitness of each particle parameters are calculated. The velocity and position constraints are obtained based on the time particle function and it is given as
The local and global optimal solutions are calculated based on the fitness function and inertia weights. The velocity and position are given as
The dynamic change in the learning factor is obtained using the above functions given in Equations (10) and (11). If the search time increases, then the global learning factor decreases. On contrary for increased search time the local learning factor is increases. These dynamic learning factors obtain global optimum quickly in the early stage. Similarly, the local optimum is also identified in the last stage which improves the search efficiency of the path planning process. In order to provide collision free path, a collision avoidance system is incorporated in the path planning process using modified whale optimization algorithm. The hunting strategies of humpback whales are formulated to solve the optimization solves. The prey in the ocean surface are hunted by whales by creating bubbles in nine different shapes and it hunts the prey in the ocean surface. The strategy is quite interesting and it is related to proposed path planning for collision avoidance system. The bubble mechanism of whales is related to the sensor deployed in the robot and the obstacles are identified similar to the prey identification process in the whale optimization.
In the proposed path planning model, the environment is considered as dynamic and initially the position of obstacles is unknown to the robot. So it assumes that the current path is the best optimum path and position. The position of robot is adjusted if the obstacle is identified. For that the sensors are used and the best forager defines the position of obstacles so that it was confirmed by the other in the group. This enclosing or exploitation process is mathematically expressed as
The t
q
represents the present iteration, the coefficient vectors are represented as
The solution given in Equations (14) and (15) identifies the prey however the convergence for optimal solution is slow in the traditional whale optimization algorithm. In order to improve the convergence speed weight functions are introduced in the exploitation and exploration process and it is given as
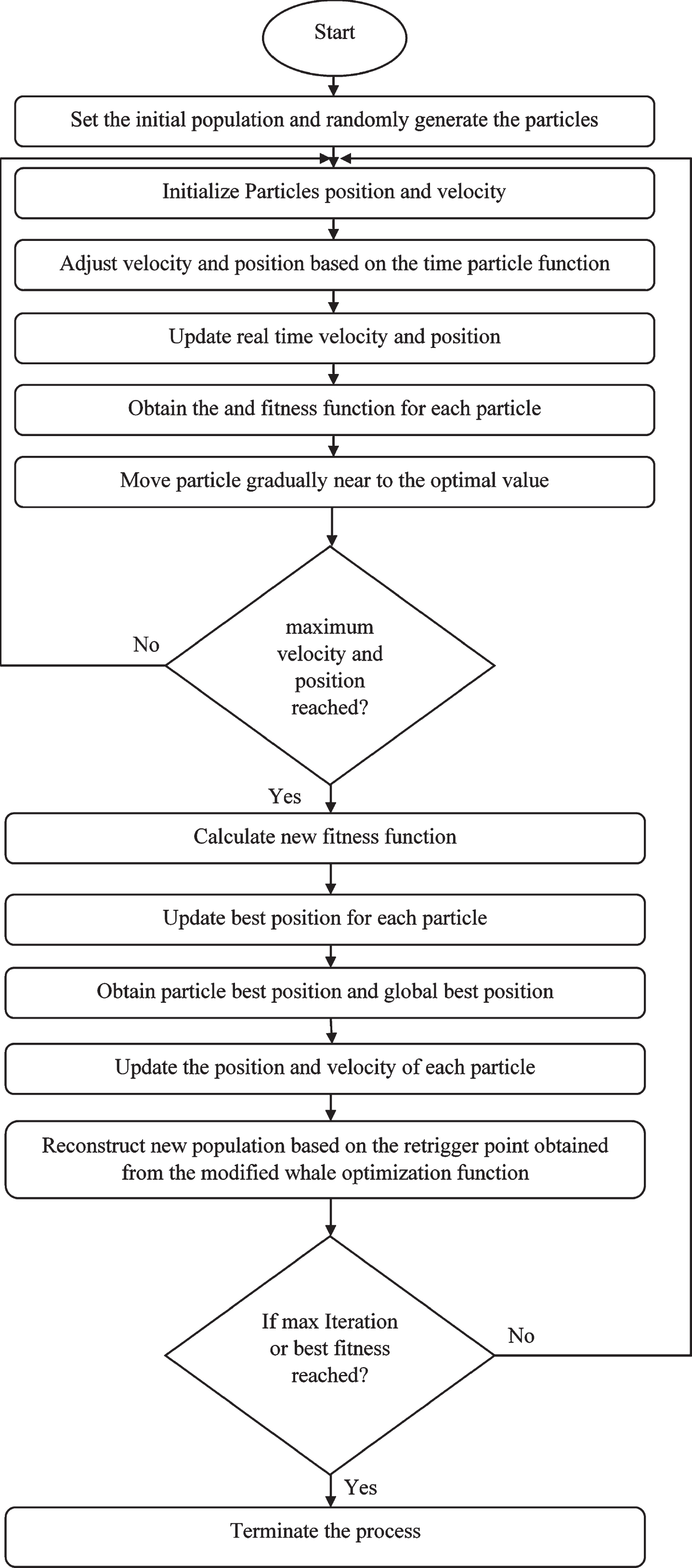
process flow of proposed hybrid optimization model.
Set the initial population and randomly generate the particles. Particles position and velocity are initialized.
Based on the time factors obtain the unknown coefficients.
The velocity and position are adjusted based on the time particle function given in Equation (6).
Real time velocity and position are updated based on the formula given in Equations (7) and (8).
Obtain the fitness function for each particle and analyze the results obtained in step 4. If the real time value does not match with value obtained in step 3, then the fitness value of the particle is set into constant. In the searching process, larger fitness value particles are excluded and it does not consider as optimal particle. The particle gradually moves near to the optimal value until it reaches the constraints given in Equation (6).
If the real time maximum velocity and position is near to the value of Equation (6) then fitness function is calculated based on Equation (5). In this stage the objective of optimal iteration is obtained to define the minimum interpolation time.
The best position is updated for each particle. The fitness value is compared with best position fitness value and if it is better then it is replaced otherwise the current position is kept as best position.
Based on the fitness value of each particle best position and overall particle the global best position is obtained for the population and it is updated.
The position and velocity of the particles are updated based on the changes as per Equations (7) and (8)
Dynamic changes in the learning factor is obtained using as per Equations (10) and (11).
The new population is reconstructed based on the retrigger point obtained from the modified whale optimization function as per Equation (18) and the steps 2–5 are repeated.
Terminate the process if maximum iteration is reached or better fitness value is obtained otherwise repeat the process.
The proposed hybrid mobile robot path planning model performances are verified through simulation performed in MATLAB 14.1 installed in Intel i5 processor with 2.76 GHz frequency and 8GB RAM. The obtained best solution is considered as optimal path with shortest distance. Each simulation is iterated ten times to obtain the possible paths. The optimal path between source to target without any obstacle is obtained as 11.31 m. Due to simulation complexity, the population size has been selected as a minimum value. The solution which is closer to the optimal path is considered as the best possible path in case of obstacles present in the environment. The simulation parameters for the proposed optimization model is listed in Table 1. The performance of the proposed optimization model is validated with existing optimization techniques such as Genetic Algorithm (GA) and Direct Artificial Bee Colony (DABC) algorithm, conventional particle swarm optimization (CPSO) and conventional whale optimization algorithm (CWOA). The simulation parameters for genetic algorithm includes the initial population of 50 with mutation and crossover probability of 0.20 and 0.80 respectively.
Simulation parameters
Simulation parameters
The chromosome size is defined as 16 bits and maximum iteration is 100. For direct artificial bee colony optimization, the maximum iteration is selected as 120 and the coefficients α, β values are selected as 2 and 0.5 respectively. The population size is 6, in that 4 bees are onlooker bees and 2 are employer bees and the food source value is assumed as 4. Figure 4 depicts the optimal path from source point to target point without any obstacle. The optimal path between source to target without any obstacle is obtained as 11.31 m.
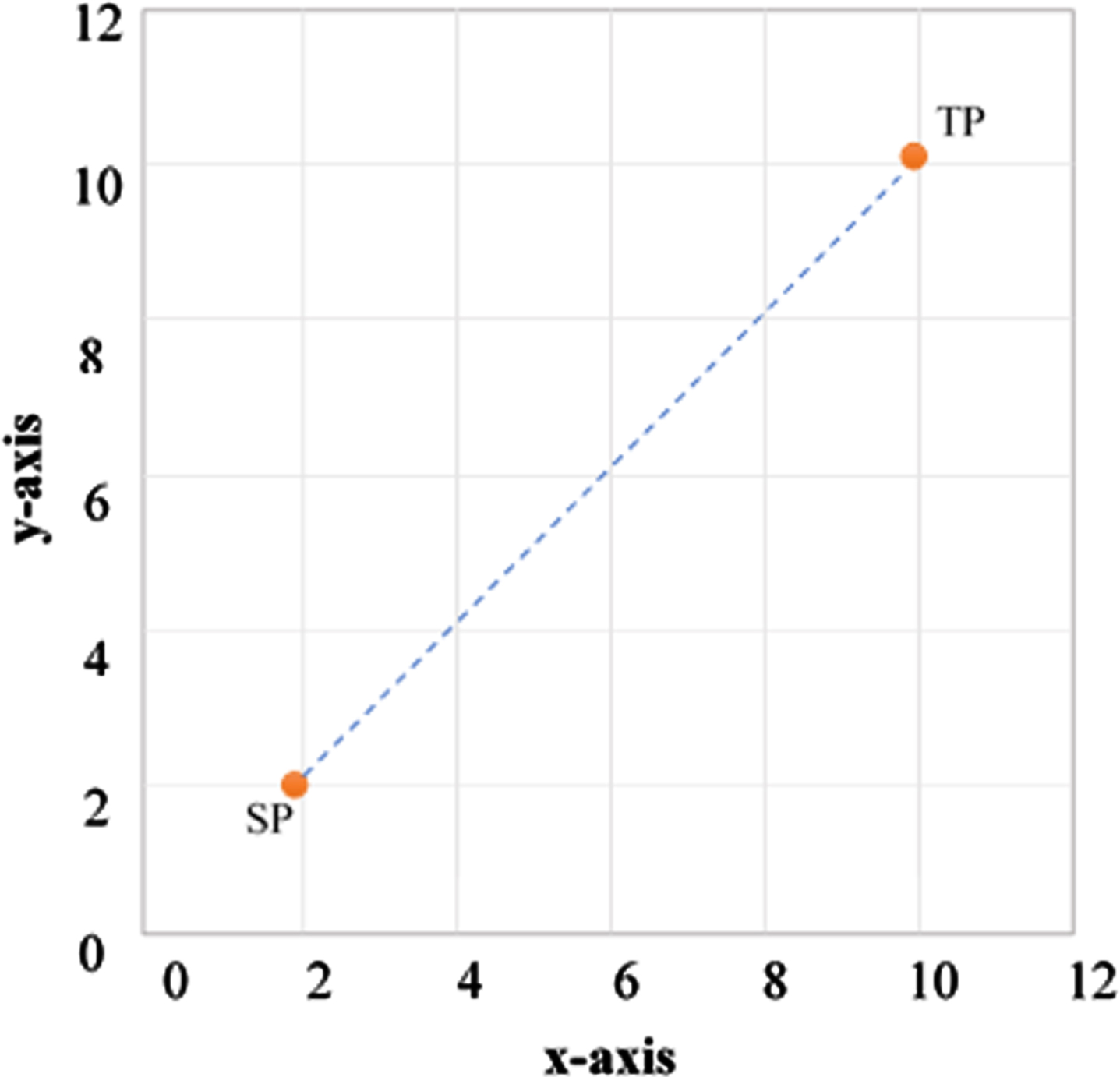
Optimal path without obstacles.
The experimentation is performed as two cases and tested 50 times. Total 100 tests are conducted for both cases. In the first case the obstacles movements are considered as linear so that the movements will be horizontal and vertical. For case 1 four obstacles are considered. Figure 5 depicts the obstacles and mobile robot with source and target point. The initial positions and its velocity, radius, angle are listed in Table 2. The sensing radius for each point is selected as 0.2 m. From the figure (a), (b) the initial movements of mobile robot and obstacles. It can observed that the path planning process identifies the obstacle and changes its path immediately.
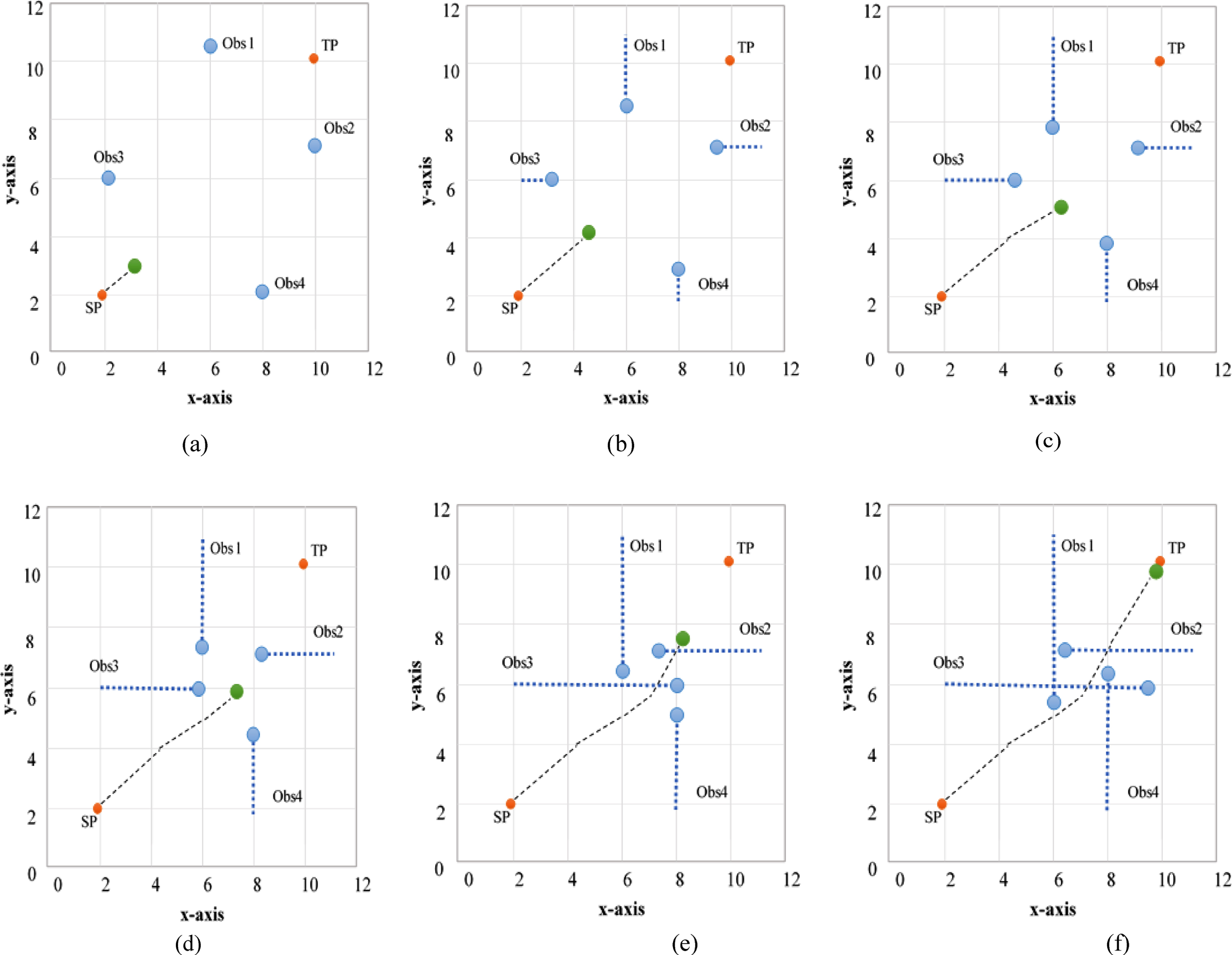
Proposed Hybrid model path optimization process for 4 obstacles. (a) Initial movement of mobile robot, (b) obstacles starts to move from its actual position, (c) obstacle 3 is in sensing range (d) obstacle 2 is in sensing range, (e) new path to avoid obstacle, (f) robot back to optimal path and reached target.
Obstacles motion characteristics for case 1
In Fig. 5(c) the sensing range of obstacle 3 is near to robot so that the path is changed. In Fig. 5(d) it can be observed that obstacle 2 is near to the robot and to avoid obstacles the path is slightly changed and finally it reaches the target point with path length of 11.64 m. In the first case, the obstacles movements are considered as linear so that the movements will be horizontal and vertical. For case 2 six obstacles are considered. Figure 5 depicts the obstacles and mobile robot with source and target point. The initial positions and its velocity, radius, angle are listed in Table 3.
Obstacles motion characteristics for case 2
The obstacles movements are selected as random degree of movements. It can be observed from the results given in Fig. 6(a) and (b) the initial movements of mobile robot and obstacles. In Fig. 6(c) it can be observed that the obstacle 4 present in the sensing range so that the path is changed to avoid collision. Similarly, in Fig. 6(d) the obstacles 2 and 6 are in the range and the path is changed immediately. In Fig. 6(e) obstacle 5 is in the sensing range so the path is slightly changed. After that there is no point for collision so that the path is rerouted to optimal path. The path length covered by the mobile robot for case 2 is 12.02 m.
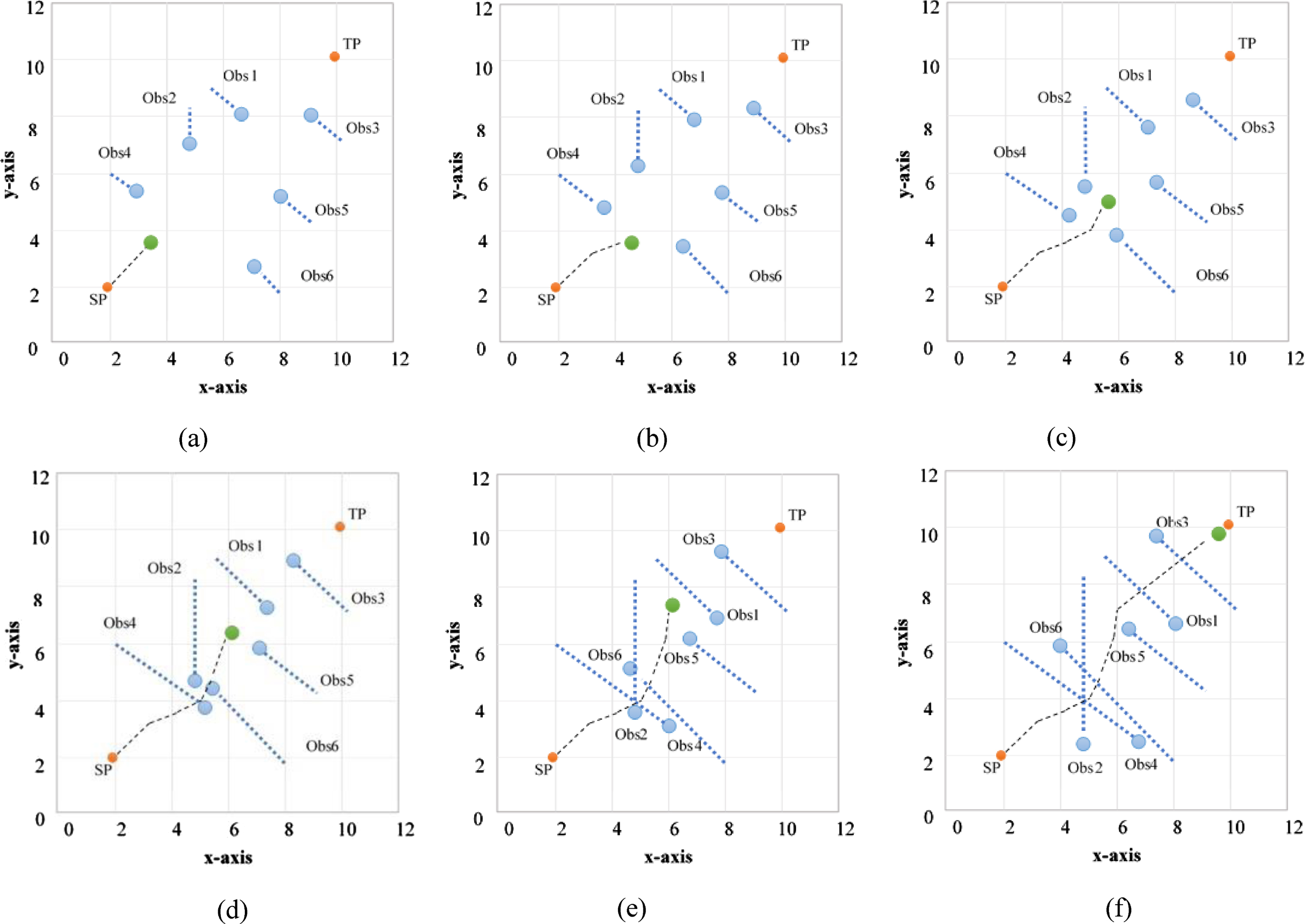
Proposed Hybrid model path optimization process for 6 obstacles. (a) Initial movement of mobile robot, (b) obstacles starts to move from its actual position, (c) Obstacle 4 is in sensing range (d) obstacle 2&6 is in sensing range, (e) obstacle 5 is in sensing range, (f) robot back to optimal path and reached target.
To measure the performance of proposed model in both cases, the experimentation is repeated for 50 times. Total 100 tests are conducted and observed how accurately it reaches the destination point without colliding the obstacles. Figure 7 depicts the observed accuracy values for case 1 and case 2. The average accuracy obtained for case 1 and 2 are 98.55%and 97.57%respectively. The variation in the accuracy plot indicates in that particular test obstacles are interfered in the mobile robot path. The performance comparative analysis of proposed optimization model and exiting optimization techniques are listed in Table 4 for the parameter’s maximum fitness, Minimum fitness and Mean fitness. It can be observed from the results the proposed hybrid optimization model has better fitness function compared to other methods due to the optimal parameter selection.
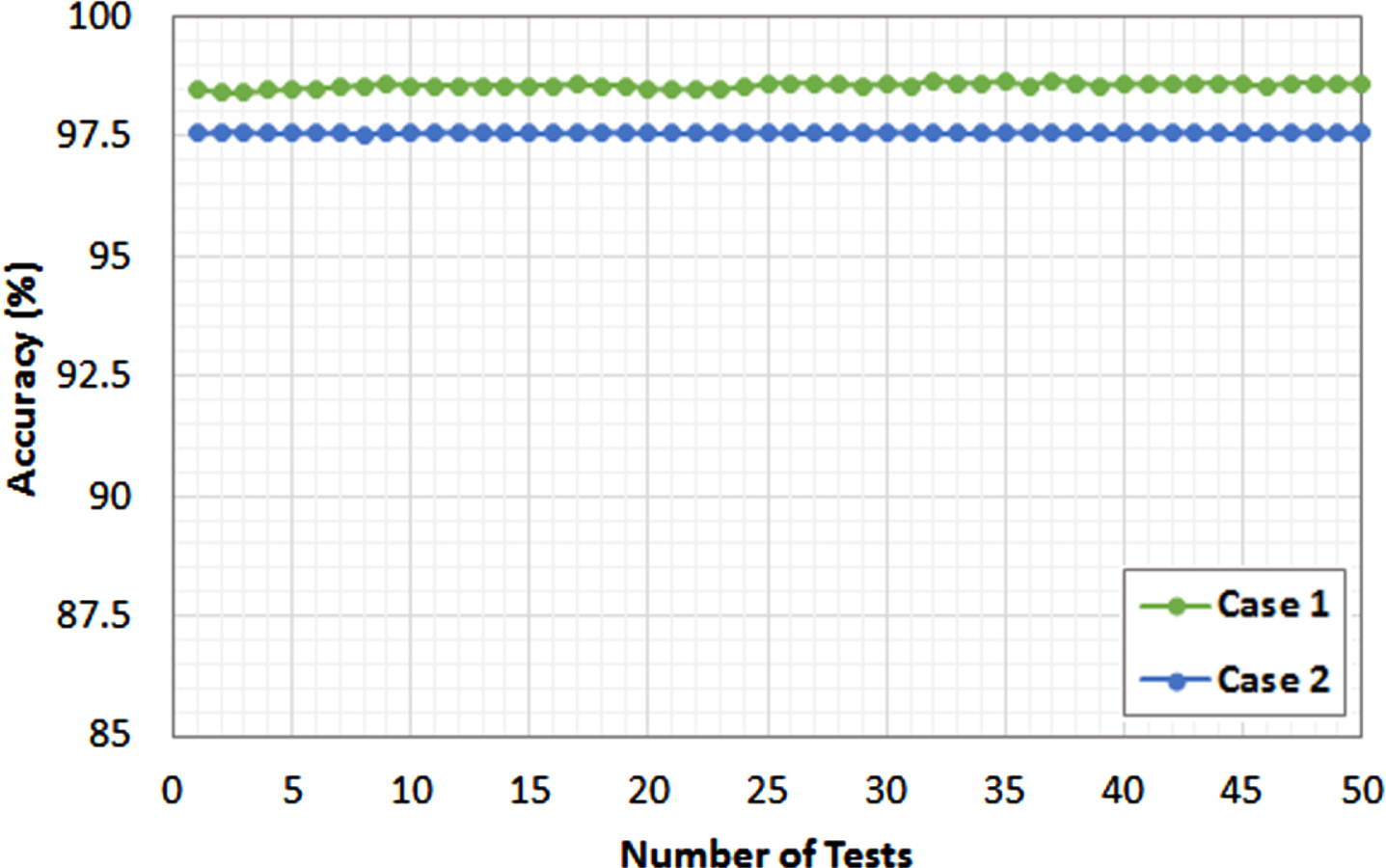
Accuracy plot.
performance comparative analysis for case 1 and case 2
The computation time comparison for the proposed model and existing models are depicted in Table 5. The analysis made for fitness range from 1–10 for both the cases. The computation time is calculated based on the amount of time consuming for the mobile robot to reach the target point from source point. It can be observed from the analysis the computation time for proposed hybrid optimized path planning model consumes less time compared to other optimization models.
Computation time analysis
The path length covered by all the three techniques are analyzed for both the cases and depicted in Fig. 8 as a comparative analysis. The average path length for genetic algorithm is 12.64 m and 13.96 m for case 1 and case 2 respectively. The average path length obtained by Direct Artificial Bee Colony optimization algorithm is 12.26 m and 13.68 m for case 1 and case 2 respectively. The average path length obtained by conventional particle swarm and whale optimization algorithms are 12.14 m, 13.24 m and 12.05 m, 13.15 m for case 1, case 2 respectively. The proposed hybrid optimization model obtains minimum path distance compared to other two algorithms as 11.64 m for case 1 and 12.02 m for case 2.
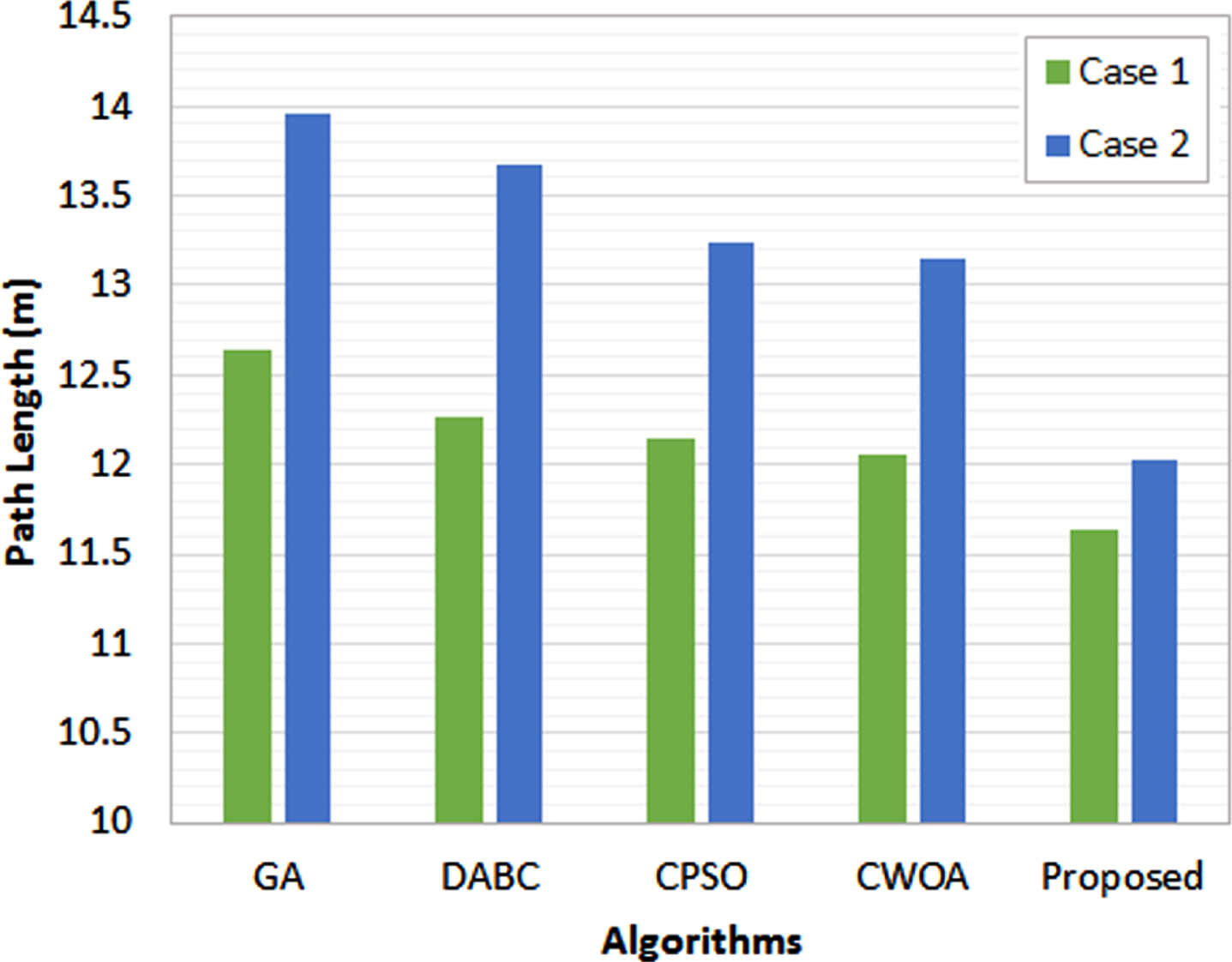
Path length for case 1 & 2.
Figure 9 depicts the average computation time for the proposed hybrid optimization model and existing optimization methods for case 1 and case 2. It can be observed from the comparative analysis proposed hybrid optimization model consumes less time compared to other optimization models. The presence of collision avoidance system efficiently predicts the obstacle movements and retriggers the path planning process of improved particle swarm optimization model. Due to this unnecessary deviation in path is reduced and the planned path has slight deviations than the optimal path without having any obstacles. From the results it is visible that the proposed hybrid optimized path planning for mobile robots performs better than existing optimization-based path planning models.
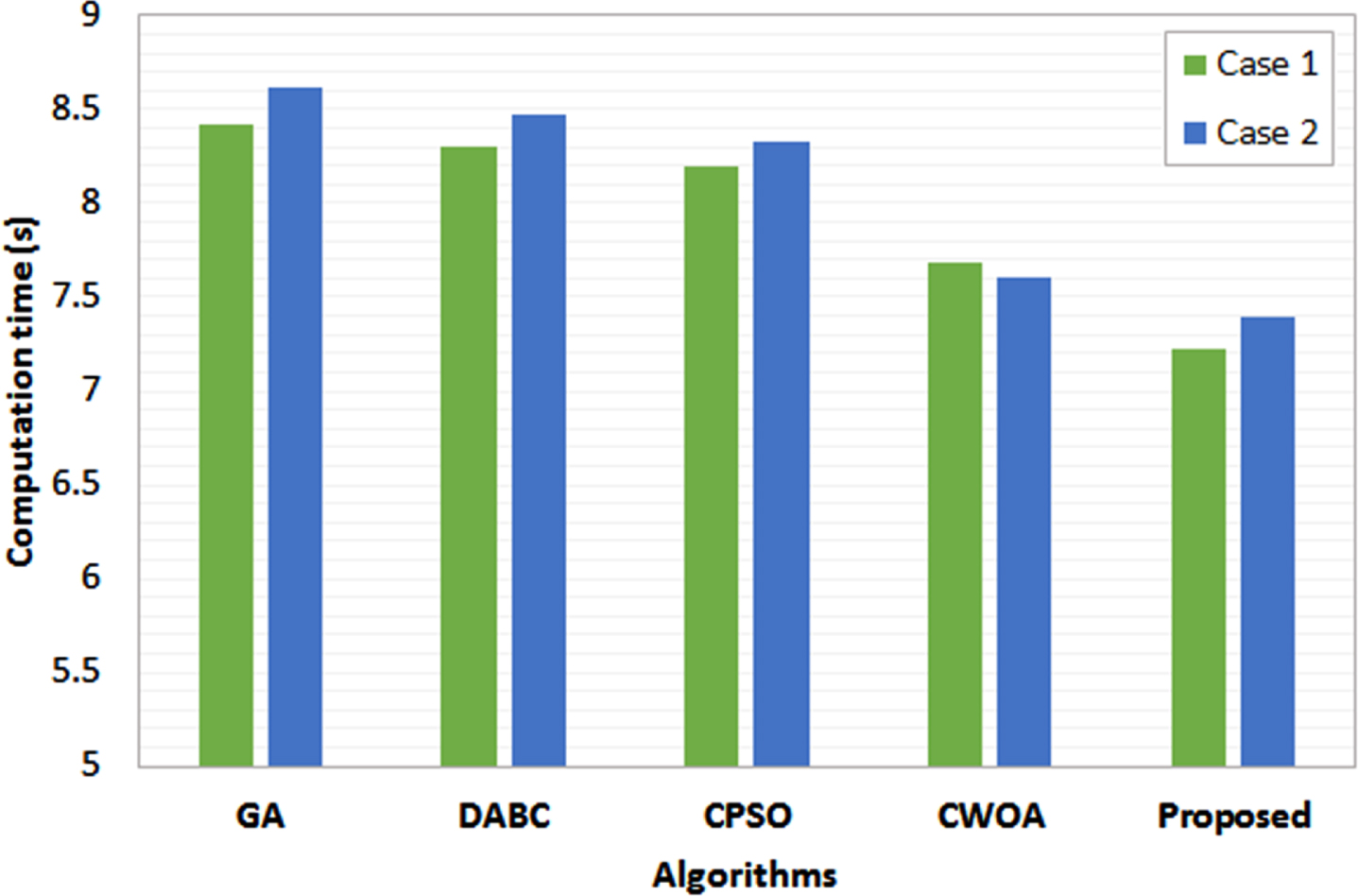
Average computation time comparison.
This research work presents a hybrid optimized path planning model for mobile robots in a dynamic environment using improved particle swarm optimization algorithm and modified whale optimization algorithm. The hybrid model is aimed to provide collision free path planning for mobile robots. However conventional methods in path planning lags in performance due to improper feature selection. The slow convergence and less accuracy affect the performance in path planning of mobile robots. The path planning is performed using improved particle swarm optimization algorithm. Modified whale optimization algorithm is used for obstacle identification. The experiments are performed into two cases. In the first case, 4 obstacles with linear movements are considered. In the second case, 6 obstacles with random movements are considered. For both the cases the proposed hybrid optimization model attains better performance in terms of path length, mean fitness and computation time. Existing optimization methods such as genetic algorithm and Direct Artificial Bee Colony optimization are compared with the performance of proposed hybrid optimization algorithm. The path length obtained for genetic algorithm, direct artificial bee colony optimization and proposed hybrid optimization models are 12.64 m, 12.26 m, and 11.64 for case 1 and 13.96 m, 13.68 m, 12.02 m for case 2 respectively. The proposed work is analyzed in simulation environment to analyze the efficiency due to practical limitations in developing prototype which is the major limitation of the research work. Further, this research work can be extended to implement the analysis in a three-dimensional environment with prototype as future work.