
Abstract
Due to the fact that the real manufacturing processes are often constrained by many kinds of resources and the trend that the energy consumption of factories is regulated more and more strictly, this paper studies the energy-efficient multi-resource flexible job shop scheduling problem (EE-MRFJSP). The goal is to minimize the energy consumption and completion time for all of the jobs’ production. Firstly, a general mathematic model for EE-MRFJSP is set up, in which the unit energy consumptions of the main resource’s different states are varied, and a constraint formula to ensure no crossover working periods for any resource is included. Then, a non-dominated sorting teaching-learning-based optimization(NSTLBO) algorithm is proposed to solving the problem, the details of NSTLBO include the real encoding method, Giffler Thompson rule for decoding, non-dominated sorting rule to rank the pareto sets and crowding distance of solution for maintaining the population’s diversity, and the traditional two evolving stages: teacher education and student mutual study. Finally, comparative experiments are made based on some new designed instances, and the results verify our proposed NSTLBO algorithm can effectively solve the EE-MMFJSP, and has obvious advantages by comparing with NSGA-II, NRGA, and MOPSO.
Introduction
With the continuous growth of global population and live standard, the manufacturing industry needs to improve its production capacity to meet the increasing market demand, which makes the manufacturing industry consume more and more energy and generates more carbon emissions. According to the EIA forecast, the proportion of energy consumption of global manufacturing industry in the total energy consumption will reach 50% in 2050, which will increase by 56% on the basis of 2020, and the carbon emissions will account for more than 35% of the total carbon emissions [1]. In 2020, China government proposed to reduce the country’s carbon emission by 30% in 2035 and achieve carbon neutrality in 2050. The pressure of energy conservation and emission reduction for manufacturing enterprises is increasing [2].
There are two ways for manufacturing enterprises to reduce their energy consumption and carbon emission. One can be named as equipment improvement, that is, upgrading their existing equipments or directly replacing them with more energy-saving and environmental protection equipments. The other can be named as management improvement, that is, using advanced scheduling theories and methods to achieve energy efficient manufacturing [3]. In contrast to the high investment, long implementation period and heavy disturbance to the daily operation by equipment improvement, management improvement only needs to update the production scheduling algorithms in manufacturers’ existing information system. So energy-efficient shop scheduling has attracted more and more attention by researchers and practitioners in the last decades [4].
So far, the existing scheduling literatures mainly consider the allocation and scheduling of jobs on machines, while a few studies consider the constraints of resources such as workers, moulds, transportation/handling vehicles and raw materials on production [5]. However, with the development of industry 4.0, manufacturing is becoming more and more automated and intelligent, and the configuration of workers, tools and other resources, which have great impact on the productivities of machines, is refined and lean. Scheduling optimizations have gradually changed from single resource scheduling, which only considers machine constraints, to multi-resource scheduling, which considers the comprehensive constraints of machines, workers, moulds, repairing tools, transportation tools or some other key materials [6–8]. From the perspective of energy efficiency, the scheduling studies are also mainly based on single resource constraint [4, 9], and only a few papers include both transportation tools and machines’ energy consumption [10].
This study addresses a kind of energy-efficient multi-resource flexible job shop scheduling problem (EE-MRFJSP) which is an expansion for traditional flexible job shop scheduling problem(FJSP). The characteristics of the problem is that each job has multiple operations, and each operation of a job may need multiple kinds of resources simultaneous working. The unit time energy consumptions for the first resource, which is usually machines, are varied in its working and idle states. The objective is to achieve a Pareto scheduling solution with minimal makespan and energy consumption which meet the constraints of jobs’ operations sequential relationship and multi-resources collaboration. The description and its integer nonlinear programming model for EE-MRFJSP is presented firstly, and then a non-dominated sorting teaching-learning-based optimization (NSTLBO) algorithm is proposed to solve the problem. Finally, the efficiency of the NSTLBO is verified by comparisons with NSGA-II [11], NRGA [12] and MOPSO [13] for optimizing some EE-MRFJSP numerical instances.
The main contributions of this study can be summarized into two aspects.
From the aspect of scheduling: (1) More realistic constraints are considered for FJSP. In some factories, a definite operation of a job must be processed by a machine and a worker, sometimes, a mould simultaneously. The production ability of the factory is affected by all of these resources. (2) The unit energy consumption differences between machines’ idle and working states are considered for FJSP. Based on the unit time energy consumption of machines in idle and working states are varied, the idle periods’ length in a schedule solution will affect the production energy-efficiency. (3) A multi-objective model is developed in which the makespan and total energy consumption for the jobs’ production are optimized.
From the aspect of the proposed algorithm: (1) According to teaching-learning-based optimization (TLBO) algorithm [14, 15], NSTLBO for optimizing the EE-MRFJSP is proposed. NSTLBO integrates the transformation from real code to integer code, Giffler Thompson rule [16] to select a resource from the available resource set, and a non-dominated sorting rule [11] to decide the Pareto set’s classes. (2) Some two and three kinds of resources constraint instances of EE-MRFJSP are designed for this research and some further studies. (3) The efficiencies of NSGA-II, NRGA, MOPSO and our proposed NSTLBO are explored and compared.
The rest of this paper is organized as follows. Section 2 summarizes literature on related scheduling problems. Section 3 describes the multi-objective flexible flow shop problem under multi-resource constraint considering energy efficiency and introduces a mathematical formulation. Section 4 presents the framework and each component of NSTLBO. Computational results of NSTLBO and comparisons with the reference algorithms are reported in Section 5, while Section 6 concludes the paper and suggests future research directions.
Literature review
Multi-resource shop scheduling
In the multi-resource shop scheduling literature, the most papers have been considered the dual-resource constraints of workers and machines. Han et al. [17] studied a hybrid flow shop scheduling problem with machines and workers constraints, the processing time of a operation was determined by the operation itself, not by the machine or workers used, and a multi-objective evolutionary algorithm was designed to solve the problem for minimizing the makespan and the tardiness. Lei and Guo [18] studied a dual-resource flexible job shop scheduling problem, in which each operation could be processed on multiple machines, and each worker could operate multiple machines, but the efficiency of workers to operate different machines was different, and a variable neighborhood search algorithm was proposed. Benavides et al. [19] studied a permutation flow shop scheduling problem which requires workers to cooperate with machines to complete the job, the processing time of a operation related to its worker, and a scattering search algorithm was proposed. Zheng et al. [20] studied a dual-resource flexible job shop scheduling with the processing time required for the same operation determined by the combination of the worker and equipment used, and a knowledge-guided fruit fly optimization algorithm was designed. Andrade et al. [5] studied a dual-resource flexible job shop scheduling problem for an accident vehicle maintenance center, in which jobs needed multiple processes, some processes only needed workers to complete, some processes only needed machines to complete, some processes needed the cooperation of workers and machines to complete, and some tasks were routine tasks, some were emergency tasks, and two heuristic algorithms were proposed to improve customer satisfaction with the machines and workers in the center.
In the above literatures, the workers and machines need work together to finish the job’s operations. But sometimes, the workers are needed only for adjusting, loading, unloading or setting up the machines for operations. Pinedo et al. [21] stated that an improper management of setup operations might easily consume more than 20% of the available production capacity. Setup operations might include fixing or removing parts to/from machines, tool replacement and machine parameter setting. Costa et al. [22] studied a hybrid flow shop scheduling problem in which workers were only responsible for automatic or semi-automatic machine setup, and a meta heuristic algorithm based on backtracking algorithm and tabu algorithm was proposed to minimize the makespan.
Some literatures explored the scheduling problem with raw material and machine constraints. Devassia et al. [23] studied a FJSP with resource recovery constraints. The problem came from the fact that the yeast used in the brewery for fermenting beer was stored in a can. When a can was used up, the yeast needed to be poured into the can. After the yeast was filled, it needed a processing time before the material could be used in the next process. a General Variable Neighborhood Search was proposed for the solution. Boufellouh et al. [24] dealt with a bi-objective permutation flow shop scheduling, and maintenance planning problem subject to limited non-renewable resources supplied from outside the system with deterministic quantities at predetermined moments. When the repair occurs in a running process, additional raw materials would be needed to continue and complete the processing work after the repair was finished.
Some literatures explored the scheduling problem with transportation tool and machine constraints. Zabihzadeh et al. [25] studied a flexible flow shop scheduling problem with robotic transportation, in which transportation of parts, loading and unloading parts were done by robots, and the objective function was finding an optimal sequence of processing parts and robots’ movements to minimize the makespan and finding the optimal quantity of robots. In order to solve the problem, the ant colony algorithm and the genetic algorithm were given respectively. Benda et al. [26] studied a hybrid flow shop scheduling problem with transportation and machine constraints. In the shop, there were several parallel machines in each stage, and the machines were equipped with buffer slots, a processing slot, and a transport slot. A decision tree rule was proposed to solve the problem for minimizing the makespan and total tardiness. Du et al. [27] studied a multi-plant flexible job shop scheduling problem, in which job scheduling and transportation scheduling were needed in each workshop. The goal was to obtain the minimum completion time and minimum energy consumption, and a hybrid algorithm consisting of estimation of distribution algorithm and variable neighborhood search (VNS) was proposed to solve the problem.
There are also some literatures that explored the shop scheduling problems with more than two kind resource constraints. Peres et al. [28] studied a scheduling problem with multi-resource constraints in assembly and disassembly operations. Every operation may need several resources to be performed, and a resource might be selected in a given set of candidates resources. An operation might have more than one predecessor and/or more than one successor on the routing. The problem was to both assign operations to resources and sequence operations on the resources. In order to minimize the maximum completion time, a disjunctive graph representation of this problem was presented and a connected neighborhood structure was proposed for optimizing by tabu search. Mati et al. [29] and Gao et al. [30] studied the scheduling problems that required the cooperation of machines and multi-kinds of resources in each operation, and greedy search algorithm and niche multi-swarm micro-migrating birds algorithms were given respectively.
Energy efficient shop scheduling
Due to the influence of energy price and environmental awareness, energy efficient shop scheduling(EES) has attracting more and more attentions. Gao et al. [4] reviewed the literatures of EES and found that there were only sporadic researches before 2012, but the related researches had increased year by year since 2015.
One of the originality for EES optimization is that the energy consumption(EC) per unit time is different when the equipment is in different states. The total EC can be reduced by decreasing the non-working time of equipments in the production process through scheduling optimization. In order to avoid production disorder caused by equipment failure in flexible job shop, Mokhtati et al. [31] studied a flexible job shop in which the unit-time EC of equipment in working state and maintenance state were different, and designed a hybrid genetic algorithm for job sequencing and preventive maintenance activity scheduling to achieve optimal makespan and total EC. Wang et al. [32] studied a distributed permutation flow shop scheduling problem, and designed a multi-objective whale swarm algorithm to realize the assignment of jobs in each factory and the job sequencing in the workshops, so as to minimize the makespan and the total EC of machine working, mould changing and idle. Wang et al. [33] studied a real-time scheduling for energy-efficient distributed and flexible job shop by using Internet-of-Thing(IoT) to collect data on shop floor. The unit time EC of machine in cutting, idle and tool changing states were different. Han et al. [34] studied a flow shop scheduling problem with different EC in working, idle, mould changing and blocking states of machines, and designed a multi-objective discrete genetic algorithm to solve the problem.
Researchers and practitioners find that the switching processes between idle and working state of machines consume a lot of energy. Therefore, adjusting the processing speed of machines to increase the flexibility of processing time and reducing the idle time between adjacent operations on the same machine has a positive impact on improving the energy efficiency. Jiang et al. [35] studied an energy-efficient distributed job shop scheduling, in which each machine had different processing speed and energy consumption, and the machine waiting for parts also consume energy. A multi-objective evolutionary algorithm was designed to allocate jobs in the factories and sequence the jobs on the machines in the same factory and set the working speed of the machines. Abedi et al. [36] studied the energy-efficient scheduling for a job-shop in which the machines had multiple working speeds and might breakdown during its operation, and the unit EC varied in different speeds, maintenance process and idle process for the machines. A multi-population multi-objective cultural gene algorithm was designed to solve the problem.
Reasonable arrangement of transportation tools also had an important impact on the energy consumption for shops. Yan et al. [37] studied the energy efficient scheduling problem of a hybrid flow shop in which the machines had preheating, setup, machining and tool changing states, and the unit EC of these states were different. The movement of parts among machines was completed by the transport vehicles driven by energy, and the vehicles’ routing was determined by the jobs’ scheduling solution. The problem was to achieve an optimal scheduling with minimal makespan and EC. Lu et al. [38] studied the EES of a permutation flow shop, in which the jobs between processes were transported by conveyor belt, the EC of conveyor belt was determined by its transport speed, and the EC of machines in idle, working, adjusting, start-up and shutdown activities were different. A multi-objective backtracking optimization algorithm was proposed to achieve optimal scheduling with pareto solution of makespan and total EC. Ebrahimi et al. [10] studied the EES of flexible job shop in which machines had three states: working, short idle and long idle. Both working and short idle consumed energy. The jobs were transported by transportation vehicles. In order to achieve the minimum tardiness and energy consumption, a hybrid algorithm combining simulated annealing and ant colony algorithm was designed to solve the problem.
Due to the development of photovoltaic power generation and electricity storage technology, manufacturing enterprises can lay photovoltaic circuit boards above factory buildings for generating electricity. Combined with the different electricity prices of national main power grid in different time of a day, factories can carry out energy efficient scheduling and save energy expenditure. Wang et al. [39] studied the jobs scheduling and the arrangement of using photovoltaic power generation, self owned energy storage power station or main power grid for a manufacturer to minimize the total energy expenditure. When the electricity price of national main power grid was higher, the electricity of photovoltaic power generation or self owned energy storage power station should be used as much as possible, and when the electricity price of main power grid was lower, the electricity of main power grid should be used as much as possible. Considering the energy consumption of machines in its idle and working states, and the time of use(TOU) price of main power grid, Ding et al. [40] studied a flexible flow shop scheduling optimization with the objective of minimum tardiness and energy expenditure, and gave a hybrid particle swarm optimization algorithm.
From the previous works, it can be found that the researches on shop scheduling under multi resource constraints has a long history and rich researching results, and the researches on EES is booming since 2012, but the researches on energy efficiency scheduling combining multi-resource constraints are not too much. At present, there are only few literatures on EES considering the machine and transportation equipment constraints, but the research on the influence of other resources on the EES has not been found. So our research makes up the gap between energy efficient scheduling and multi-resource flexible job shop scheduling.
Problem definition and formulation
Problem definition
The energy-efficient multi-resource flexible job shop scheduling problem, hereinafter denoted as EE-MRFJSP, can be described as follows. There are a number of jobs that need to be processed in a workshop. Each job has several sequential operations that need to be processed. Each operation needs to be processed with the cooperation of a machine and other kinds of resources. Other resources may be moulds, tools or workers. Different operations require different combinations of feasible resources. The energy consumption per unit time for machine’s working or idle is different. EE-MRFJSP is to find out a feasible scheduling solution which can meet the constraints of operations’ processes and the coordination of production resources. The feasible scheduling want to achieve the minimal makespan and energy consumption.
EE-MRFJSP and its feasible scheduling solution satisfy the following assumptions: The number of operations for each job can be different. The 1st resource, commonly refers machines, is necessary for producing each operation. The 2nd, 3rd, . . . . . . , resources are optional for producing each operation. Each operation only needs to be processed once. The processing time for each operation is depend on the machine used. The unit EC of the 1st resource, machine, varies in its working and idle state. Each operation of the same job needs to meet the time constraints of the previous and subsequent processes. Each resource can only doing one operation at the same time. Allow jobs to wait and resources to be idle.
Problem mathematic formulation
In order to build the mathematical model of EE-MRFJSP, the notations defined in Table 1 will be used.
Notations for EE-MRFJSP
Notations for EE-MRFJSP
The PINLP mathematical model of EE-MRFJSP could be given as follows:
The minimization objective functions:
Subject to:
Equations (2) are used for the objectives of makespan minimization and energy consumption minimization respectively. Equations (3) constraints that the same operation is processed only once, that is to say, the operation is only appears in one sequence of one of the first type resource. Equations (5) constraint that the used resources must be one of its optional resource while the operation need this kind resource. Equation (6) constraints the start time and end time of the same operation. Equation (7) constraints the preceding and succeeding relationship of the operations of the same job. Equation (8) constraints that there haven’t any crossover working periods for a definite resource, ɛ is a positive real number less than 1. Equation (9) is the decision start zero time point. Equations (11) are the formulas for calculating the start time and end time of machines, the time variables will be used for evaluating the energy consumption in working periods and idle periods. Equation (12) is the 0-1 decision variables.
EE-MRFJSP is a complex form of job shop scheduling problem, which can meet more constraints of real production practices and decision-making requirements. Although its PINLP mathematical model can be built, it is difficult to solve this model with exact algorithms because it is a typical NP-hard problem. Generally, it can only use swarm intelligent algorithms to obtain some satisfactory solution sets. For its programming advantages and searching efficiencies, this paper choices the teaching-learning-based optimization(TLBO) algorithm proposed by [15] as a basic, and designs a non-dominated sorting teaching-learning-based optimization (NSTLBO) algorithm to solve EE-MRFJSP.
The framework of NSTLBO
TLBO is a swarm intelligence optimization algorithm based on the class teaching processes proposed by Rao et al. [15]. The basic idea of the algorithm is that each decision variable of a problem can be regarded as a course, and the combination of every student’s score of all courses in the class is a solution for a problem’s decision variables. Based on all student scores, the objective function value of the problem can be calculated, and then through the iterative learning processes to search the best solution. In other words, the algorithm has two learning stages: teacher education stage and students’ mutual learning stage. Through continuous learning, the satisfactory solution of the optimization problem can be obtained.
The algorithm does not need special parameters debugging, and can obtain better optimization results. It has been proved that TLBO can solve many kinds of combinatorial optimization problems. The framework of the proposed NSTLBO algorithm and its pseudo code are listed as follows:
Real encoding mechanism
In the NSTLBO algorithm, a single solution is a student’s score of each subject, and the score variable is a real number. In the application of NSTLBO algorithm to EE-MRFJSP, the percentile real number coding is used. If the total number of operations in the problem is s and the number of students in the class is P, the two-dimensional array Class, which has P rows and s columns, is generated randomly in Step 3, the s real numbers in the range [0,100] at each row of the Class array represent the scores of s subjects of a single student.
Take the J1 and J2’s data of the instance mgfjsp3_06_10 in Section 5.1 as example to describe the NSTLBO in detail.
From Table 2 in Section 5.1, the J1 and J2 have 4 operations respectively, and the sum operations is 8, so each student has 8 subjects while the algorithm initialize its class by random. Let the quantity of the students in the class is 2, one possible array as following may be created.
Relationship between jobs’ operations and the 1st resource
Relationship between jobs’ operations and the 1st resource
Class = {, [80.1 50.2 61.0 74.2 77.8 22.2 32.0 57.7]}
NSTLBO decoding for a single student needs finish three contents: (1) determine the sequence of all operations based on the student’s scores of each subject; (2) according to the sequences of the operations, allocate each operation in turn, determine the resources combination to finish the operation from its optional resource sets, and generate a detailed production schedule which includes the start time and finish time for each operation and each resource; (3) calculate the objective functions according to the detail production schedule.
Specifically, the decoding process of NSTLBO algorithm for a specific student is as follows:
Take the first student’s score in the last Class of section 4.2 as example. A vector B = [6 1 8 5 4 2 3 7] and a vector C = [o22, o11, o24, o21, o14, o12, o13, o23] are generated based on Step 2 and Step 3. Then the detail schedules for the 8 operations will be arranged in the order of o11, o21, o22, o12, o13, o23, o24, o14 based on Step 4.
Non-dominated sorting approach
In the teacher education stage and students’ mutual learning stage, a 2P class will be formed respectively, and then the top P students from the 2P class will be selected to form a new class for further iteration. Multi-objective optimization generally determines the relationships between solutions according to the non-dominated dominance rank and crowding distance, and keeps the optimal solution and the diversity of the selected solutions. Our algorithm adopts the fast non-dominated sorting method proposed by [11]. The general steps for non-dominated sorting are as follows:
Crowded distance calculation
In the multi-objective optimization algorithm, for a specific solution in a non-dominated solution set, if its neighbor density is low, the probability for the solution selected is high. If its neighbor density is high, the probability maybe lower to ensure the diversity of the population. In multi-objective optimization, crowded distance(CD) is often used to measure the neighbor density around a solution [13, 41]. cd
p
, the crowded distance for solution p, is calculated by Equation (13).
In Equation (13), f(p+1)h and f(p-1)h represent the hth objective function value of the two solutions before and after the solution p in the current non-dominated solution set sorted by the hth objective value. For the first and last solution in the non-dominated solution set, the crowding distance is set as the sum of all objective functions in the current solution set, so that it could be selected with a high probability in the next iteration.
The crowded distance of a solution p in the two-objective non-dominated solution set is shown in Fig. 1, in which the solid points are the solutions of the same rank non-dominated solution set, and the hollow points are the solutions of another rank non-dominated solution set.

Diagram for crowded distance of a solution p.
In NSTLBO algorithm, set
In Equation (14), τ is the random number in the range [0, 1] to simulate the randomness of educational achievement to each student. ds,t is the difference between the score of the best student and the class average score. T
F
is the teaching factor which decides the value of mean to be changed, T
F
is a random number generated in the algorithm iteration, according to a number of experiments on many benchmark functions, it is concluded that the algorithm performs better if the value of T
F
is between 1 and 2, so our algorithm creates the value of T
F
by Equation (15), notation [x] represents to get the round value of x..
After obtain the new scores γs,p,t* with Equation (14) for all students, NSTLBO combines the new class, which is formed by the new scores γs,p,t*, with the previous class to make a new class, named as Class1, with 2P students, then apply the non-dominated sorting approach and calculate the CD for each students in Class1, and finally choose the top P students from Class1 to form a new class to replace the previous array Class which will do the next study stage: student mutual study stage.
After the teacher education stage, students enter the stage of mutual learning, in which students learn from each other to increase personal knowledge and improve subject scores. The specific implementation method is to randomly match a student q with another student p with different scores, update all p’s subjects scores by using Equation (16) based on each objective f
h
(h = 1, 2).
After obtain the new scores of subject s γs,p,t* with Equation (16), NSTLBO combines the new class, which is formed by the new scores γs,p,t*, with the previous class to make a new class, named as Class2, with 2P students, then apply the non-dominated sorting approach and calculate the CD for each students in Class2, and finally choose the top P students from Class2 to form a new class to replace the previous array Class which will be processed for the next iteration, and judge and update the optimal non-dominated solutions.
When the algorithm reaches the maximum iteration generation or the non-dominated solution set is not changed for continuous 50 generations, the algorithm stops.
Computational experiments and analysis
Experiment instances
To our knowledge, there are no available instances for EE-MRFJSP, so we design six instances for experiments and further studying according to the characteristics of the problem and the flexible job shops with two or three resource constraint are very common in practice [42]. The instances are named as mgfjsp2_06_10, mgfjsp2_10_16, mgfjsp2_20_30, mgfjsp3_06_10, mgfjsp3_10_16, mgfjsp3_20_30 respectively, where the first number is the kind quantity of resouces, the second number is the job quantity, and the third is the resource quantity of each kind of resource. Take the instance named mgfjsp3_06_10 as example to introduce the main data of the problem in Tables 2 5.
Relationship between jobs’ operations and the 2nd resource
Relationship between jobs’ operations and the 2nd resource
Relationship between jobs’ operations and the 3rd resource
Processing time for jobs’operations according to the 1st resource
In the instance, there are three kinds of resources. Resource 1 can be regarded as the key operation resources in the shop: machinery and equipment. Resource 2 and resource 3 can be regarded as the auxiliary operation resources in the shop: workers, tools or grinding tools. The number of jobs to be completed is 6. In Tables 2, 3 and 4, number 0 in the cross cell indicates that the job does not need the corresponding resources for all of its operation, and a integer number in the cross grid indicates the job’s operation number which needs the corresponding resources to complete. For example, the number 4 in the second row of Table 2, which represents the fourth operation of job 2, appears in the 1st and 3rd columns, indicating that the operation o42 can be completed by the No1 or No3 object of the first kind of resource, and must be completed by one of them. Considering with the second resources needed by the operation o42 appearing at the columns 4 and 6 in Table 3, and the third resources needed by operation o42 appearing at the columns 3 and 9 in Table 4, the production resources condition for operation o42 is determined as: one of the No1 or No3 of the first resource, one of the No4 or No6 of the second resource, and one of the No3 or No9 of the third resource. Table 5 shows the processing times of each process of the jobs based on the 1st resource.
The relationship among operations and key resource 1 in Table 2 shows that the number of operations of the six jobs are 4, 4, 5, 4, 5 and 4 respectively. Combined with Table 3, it can be concluded that resource 2 is not needed for the 4th and 5th operation of job 3 and the 4th operation of job 4, and resource 3 is not needed for the 5th operation of job 5.
In addition to the above data, the unit time energy consumption of 10 objects of the 1st resource in working and idle states are [35,15,25,25,40,30,20,30,30, 35,15,25,25,40,30,20,30,30], [8,6,6,6,8,6,6,8,4,8, 8,6,6,6,8,6,6,8,4,8] respectively.
Take the results obtained by NSTLBO algorithm for mgfjsp3_06_10 as an example, a brief analysis is made to understand the multi-objective optimization decision-making process and the indicators in the next section of algorithm performance comparison. The non-dominated solution set and the corresponding objective function values of the instance mgfjsp3_06_10 which is generated by one running of NSTLBO are shown in Table 6.
The non-dominated solution set and objectives for mgfjsp3_06_10
The non-dominated solution set and objectives for mgfjsp3_06_10
It can be seen from Table 6 that NSTLBO obtains six non-dominated solutions for the instance mgfjsp3_06_10 in this experiment. The minimal values of the two objective functions are 91 and 10844 respectively. Obviously, these two minimal objective values cannot appear in the same solution. The minimal value of objective 1 appears in solution No1, and the minimal value of objective 2 appears in solution No2. However, the value of the other objective function corresponding to these two solutions is the worst. The total energy consumption of solution No1 is the worst 11764, while the completion time of solution No1 is the worst 103.
When the algorithm gives the non-dominated solution set and the corresponding objective function values of each solution, the decision maker needs to make trade-offs and decision, and choose a operation code to carry out the actual production. Suppose that the decision-maker chooses solution No6 as the final production plan after comprehensive trade-off, the algorithm will decode the solution No6 operation code to a detail scheduling scheme, and Fig. 2 is the Gantt chart corresponding to the detail scheduling scheme.
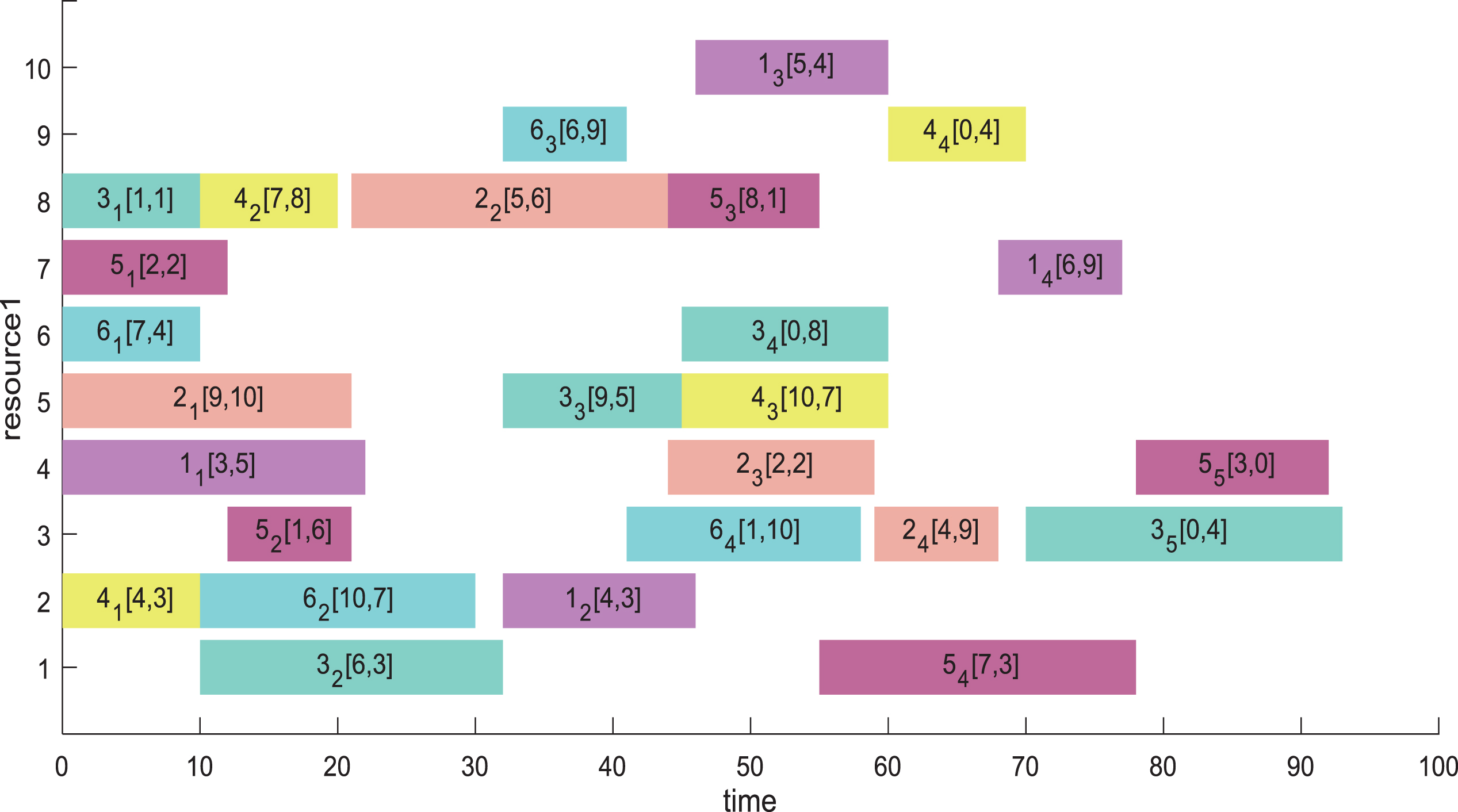
Gantt chart of the non-dominated solution No 6.
The vertical axis of Fig. 2 shows the numbers of the resource 1 used. The number in the bar chart means: the first is the job number, the second is the operation number as a subscript, and the first and second numbers in square brackets are the number of resource 2 and resource 3 used respectively. If the corresponding number is 0, it means that the operation does not need resource 2 or resource 3, but only needs other resources, for example: 34[0,8] means that the fourth sequence of job 3 will be completed under the cooperative operation of the No6 object of the 1st resource and the No8 object of the 3rd resource, and any of the 2nd resource is not needed.
According to the analysis on Table and Fig., it can be concluded that NSTLBO algorithm can optimize EE-MRFJSP and guide the shop floor production.
NSGA-II, NRGA, MOPSO are selected for comparing with NSTLBO and analyzing the performance of NSTLBO for solving the EE-MRFJSP. Optimization experiments on the six instances are carried out by the four algorithms, and the performances of these algorithms are compared and analyzed through the experimental results. The experiment computer’s configuration is as follows: the frequency of CPU is 3.4 GHz, the memory is 8GB, the operating system is windows7, and programming software is MATLAB 2016a. The maximum evolution generation is 500, and the maximum unchanged generation is 50. Because these algorithms are random search algorithms, each algorithm has made 10 optimization experiments for each instance, and then the experimental results are compared.
Comparison on non-dominated solution set
Let
According to the above selecting rule, one NDS for each algorithm is selected from its 10 NDSs respectively. The comparing charts for all of the instances’ NDSs show in Fig. 3. It can be seen that the NDSs obtained by the NSTLBO algorithm are relatively better than that of the other three comparison algorithms. The larger the scale of the instance, the better of the NSTLBO NDS.
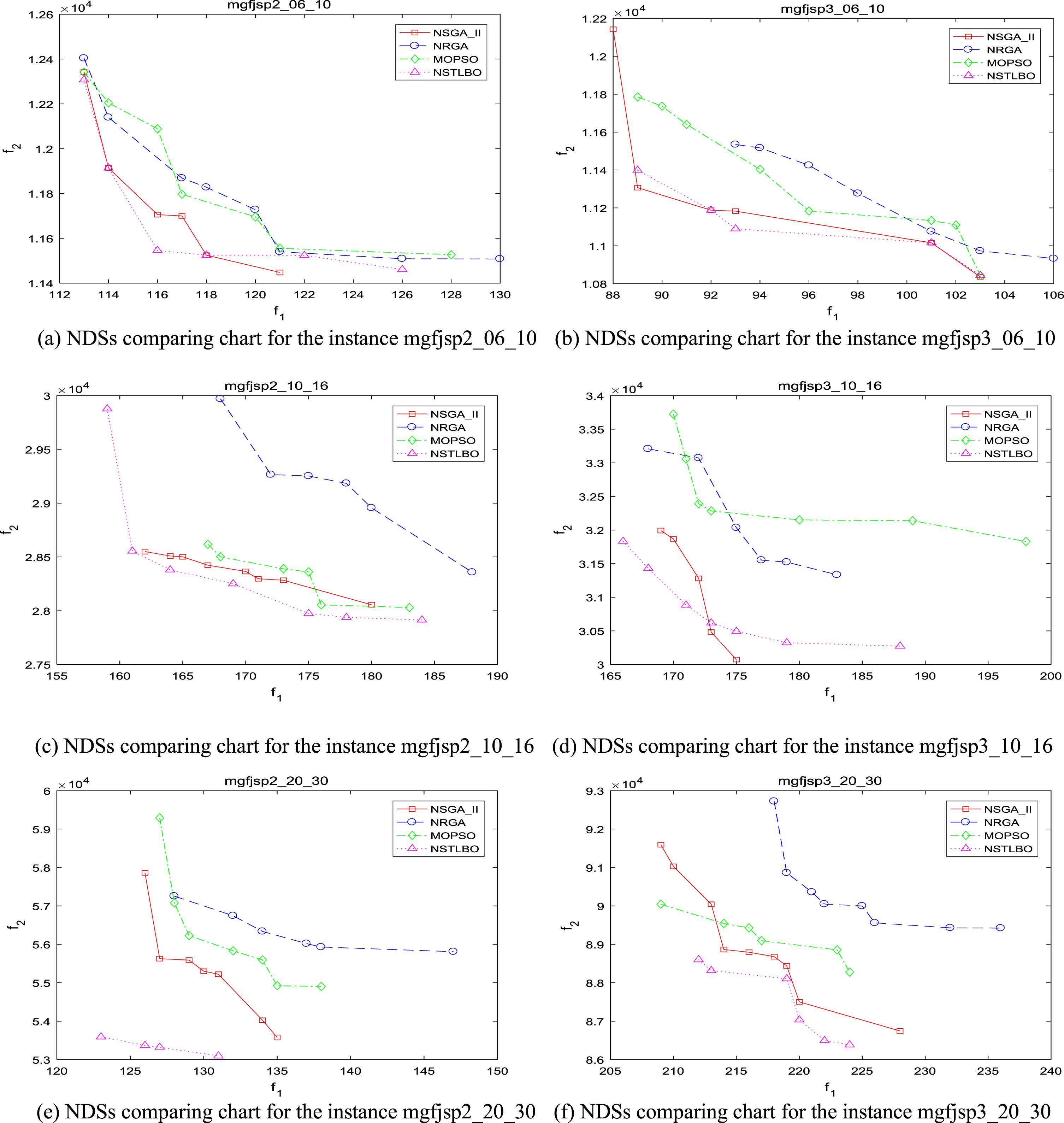
Comparison charts of the NDSs achieved by NSTLBO, NSGA_II, NRGA, and MOPSO for the six instances.
The experiments’ results and some statistical indexes of the four algorithms are listed in Table 7 for comprehensive performance comparison. In Table 7, A and B are the minimum and average values of the two objective functions in the NDSs obtained by each algorithm for 10 experiments. C is the average running time (unit: seconds) of one experiment of each algorithm, and D is the average solution number in the NDSs searched by each algorithm. It can be seen from the experimental results that: (i) Using index A, the minimal values of the objectives, to evaluate the performance of the algorithms, NSTLBO’s optimizing performance is nearly the same as that of the other three algorithms for a relatively small data set, such as instance 2_06_10. But for large-scale datasets, NSTLBO is better than NRGA and MOPSO, and is relatively better than NSGA-II; (ii) using B, the average values of the objectives, to evaluate the performance of the algorithms, the order of the algorithms from good to bad is: NSTLBO, NSGA-II, MOPSO and NRGA; (iii) using C, the average computing time, to evaluate the performance of the algorithms, the order of the algorithms from good to bad is: MOPSO, NRGA, NSTLBO and NSGA-II; (iv) using D, the average number of the NDSs, to evaluate the performance of the algorithms, the order of the algorithms from good to bad is: NSGA-II, NRGA, MOPSO and NSTLBO. From the above experimental results and the analysis, it can be seen that the proposed NSTLBO algorithm can obtain better NDSs in solving energy-efficient multi-resource constraint flexible job shop scheduling problems, and is more optimal than other comparative algorithms in obtaining minimal objective values and average objective values.
Comprehensive performance comparison of NSTLBO, NSGA-II, NRGA, MOPSO
Comprehensive performance comparison of NSTLBO, NSGA-II, NRGA, MOPSO
Note: the underlined and bold number are the minimal objective values of the four algorithms for each instance.
Many production and manufacturing processes are constrained by more than one kinds of resources at the same time, this paper studies the scheduling optimization for flexible job shops with many resources’ constraint to obtain the minimization of finish time and energy consumption simultaneously. Firstly, to describe the scheduling problem EE-MRFJSP in a clearer and more accurate way, a mathematic model for the problem with two common objectives: makespan and energy cost, is constructed. Secondly, based on the objectives and the time and resource constraints of EE-MRFJSP, a NSTLBO algorithm is developed to obtain pareto solutions for the problem. Then, six EE-MRFJSP instances with two or three kinds resources constraint are provided for testing algorithms’ performances. Finally, some testing experiments to optimize the six instances are made by NSGA-II, NRGA, MOPSO and the proposed algorithm NSTLBO, and the results show the NSTLBO has better optimization performances than other three algorithm for EE-MRFJSP. It can be seen that the proposed NSTLBO can solve EE-MRFJSP well, and its performance is better than other common optimization algorithms.
For the optimization of EE-MRFJSP, there are three possible directions for future research. Firstly, for the quantity of orders and the quantity of the resources may be dozens or hundreds, and the constraint resources may include many kinds of resources, machines, tools, vehicles, labors and others in real manufacturing, so the performances of NSTLBO and the contrast algorithms for large scale problems can be explored further. Secondly, the order delay time, resource work-load balance and other objectives sometimes are important for decision makers in actual operation decision, so the optimizing algorithms for EE-MRFJSP with other two kinds of objectives or with more than two objectives can be studied further. Finally, the scheduling decision is a dynamic scheduling process with the arrival of new orders in real practice, and sometimes which also includes special scheduling process for some urgent orders, so the dynamic scheduling for EE-MRFJSP is a very meaningful research direction.
Footnotes
Acknowledgments
The study is supported by the National Natural Science Foundation of China (no. 71802099).