
Abstract
Multi-dimensional uncertain differential equations (MUDEs) are often used to describe complex systems that vary with time. In this paper, the generalized moment estimation method is employed to estimate the MUDEs’ unknown parameters. A method to optimize parameters with multiple estimation results is proposed. The hypothesis test and α-path are proposed to verify the feasibility of the parameter results. Several examples of parameter estimation for MUDEs are given, as well as two numerical examples to verify the feasibility of the method.
Keywords
Introduction
In order to model dynamic systems vulnerable to random noise, Ito [1] introduced a class of stochastic differential equations (SDEs) driven by Wiener processes in 1944. SDEs have seen tremendous expansion and are now employed in a wide range of academic fields, such as physics, biology, and economics. A significant area of study for many academics was the parameter estimation of SDEs. Numerous parameter estimation techniques have been developed, including the least square method (Kailath) [2], maximum likelihood method (Strasser) [3], moment estimation method (Gallant) [4], and others. However, probability theory is unsuitable when the distribution function is not close to the real frequency. To address this issue, Liu [5] established a framework for uncertainty theory based on normality, duality, subadditivity, and product axioms in 2007.
Liu [7] first presented uncertain differential equations (UDEs) in 2008. It is a class of differential equations used to model and analyze dynamic systems with uncertainties that are driven by the Liu process. Various forms of UDEs have been proposed due to the increasing interest and research in UDEs by researchers. Backward uncertain differential equations were presented by Zhu and Ge [8], who also established existence theorems for their solutions. In 2015, Yao [9] proposed uncertain differential equations with jumps driven by renewal process and Liu process, and provided sufficient conditions for the uniqueness of the equations’ solutions. Yao [10] defined high-order uncertain differential equations as the UDEs with high-order derivatives. In 2014, Yao [11] proposed a multi-dimensional uncertain differential equations (MUDEs) driven by a multi-dimensional Liu process.
As the core problem of UDEs, parameter estimation is being thoroughly researched. Sheng et al. [12] presented a least squares estimation method for estimating unknown parameters. Yao and Liu [13] proposed a moment estimation method based on a difference form. Liu [14] proposed the generalized moment estimation method to deal with the case where the moment estimation equation cannot be solved. Using the principle of moment estimation, Lio and Liu [15] first solved the time-varying parameters in UDEs. In addition, Liu et al. [16] suggested the maximum likelihood method to estimate the parameters. Yang et al. [17] proposed the α-path method to estimate unknown parameters of UDEs from discrete sample data. Recently, the parameters of some special types of UDEs have also been estimated. Sheng et al. [18] introduced three methods for parameter estimation based on different types of solutions. Zhang et al. [19] obtained the unknown parameters of the multi-factor uncertain differential equation by using the least squares method and the moment estimation. Zhang et al. [20] estimated the parameters of high-order uncertain differential equations.
In this paper, the problem of parameter estimation for MUDE is solved by using generalized moment estimation. The remaining chapters of this article are organized as follows. In Section 2, some fundamental definitions and theorems of uncertainty theory are introduced. In Section 3, generalized moment estimates for one-dimensional uncertain differential equations are first proved and then extended to high-dimensional uncertain differential equations. To ensure that the parameter estimation results are optimal and unique, a notion of residuals is proposed, and parameters with numerous estimation outcomes are optimized. Both α-path and hypothesis testing approaches are employed to evaluate the validity of the parameter estimates. In Section 4, two numerical examples are given to verify the generalized moment estimation method. Section 5 is the summary of this paper.
Preliminaries
This section will demonstrate a number of concepts and theorems of uncertainty theory that are critical to this paper.
The inverse function Φ-1 (α) is called the inverse uncertainty distribution of uncertain variable ξ with regular uncertainty distribution Φ (x). The expected value can be equivalently expressed as
(i) C0 = 0 and almost all sample paths are Lipschitz continuous,
(ii) C t has stationary and independent increments,
(iii) the increment Cs+t - C
s
has a normal uncertainty distribution
In this section, the paper will introduce how to use generalized moment estimation to determine unknown parameters in MUDEs. And the hypothesis test is proposed to verify the reasonableness of the parameter estimation results.
The m-dimensional UDE with parameters driven by n-dimensional Liu process
One-dimensional UDEs are also known as multi-factor UDEs. Consider a one-dimensional UDE with unknown parameters (
Let P be the number of unknown parameters. According to the principle of moment estimation, the p-order sample moment of this group of samples k
i
(
The generalized moment estimate
In summary, the generalized moment estimation can solve the unknown parameters in the one-dimensional UDEs.
The case of the one-dimensional UDEs is then extended to the high-dimensional UDEs using the same general logic.
The matrix form of the equation (2) is as follows:
Similar to the case of one-dimensional UDEs, the above system of equations can be written in Euler difference form as:
When the uncertain variable
Any set of k
zi
(
The above system of equations is challenging to solve directly, therefore we split it up into various minimization issues. For each minimization equation that is solved, we can estimate the unknown parameter
When different equations contain the same unknown parameter, it results in a situation where there are multiple estimates of a parameter. The primary issue to be addressed in the following will be how to determine the best results for parameter estimate.
Let
Therefore, the total residual arising from the solution of all minimization problems can be expressed as
It goes without saying that the optimization of parameter estimation results can directly reflect the total residual R. When optimizing a parameter with multiple estimation results, the best estimate should minimize the residual within the range of estimation results.
As an example, the component μ1 of
Process the following objective optimization problem to obtain the optimal estimate of μ1:
After optimization, both the best estimate of μ1 is obtained and the sum of the residuals associated with μ1 is minimized. The best estimate of all parameters and the minimum residual R can be attained by improving each parameter with multiple estimated results in turn. When optimizing other parameters, the optimum values of the parameters are applied to those that have already been improved. For example, when estimating the optimal parameters for μ2,
The final optimal and unique parameter estimation results are obtained as follows:
Reasonableness test of estimated results
By means of the generalized moment estimation, we have obtained estimates
The α-path method is an intuitive way of determining whether parameter estimates are reasonable through images. When the results of the parameter estimation are obtained, we can determine the multi-dimensional uncertain differential equation and the corresponding ordinary differential equation. The parameter estimates are reasonable if two α-paths can be found to sandwich all observations when α ∈ (0, 1).
Hypothesis testing is an objective and rigorous method of discerning the reasonableness of the parameter estimates. When the observations fall into the rejection domain, the original hypothesis is rejected. The detailed steps are shown below:
For any set of k
zi
(i = 1, 2, ⋯ , N - 1), the test for the hypotheses:
W= {(kz1, kz2, ⋯ , kzN-1): there are at least α of indexes i’s with 1 ≤ i ≤ n such as
where
According to the same method, the hypothesis testing is performed on the data k zi when z = 1, 2, ⋯ , m in turn. When all the original hypothesis hold, the estimation results are judged to be reasonable for MUDEs with unknown parameters.
Numerical examples
In this section, two numerical examples with observed data are used to validate the above parameter estimation method. The α-path and hypothesis testing are used to verify the reasonableness of the parameter estimation results.
where μ1, μ2, σ1, and σ2 are unknown parameters. According to equation (6), we have
Observed datas in Example 4
Observed datas in Example 4
The final optimal estimate of σ1 is: 11.2623. In conclusion, the estimated value of the unknown parameter is
Hence the resulting two-dimensional UDE is
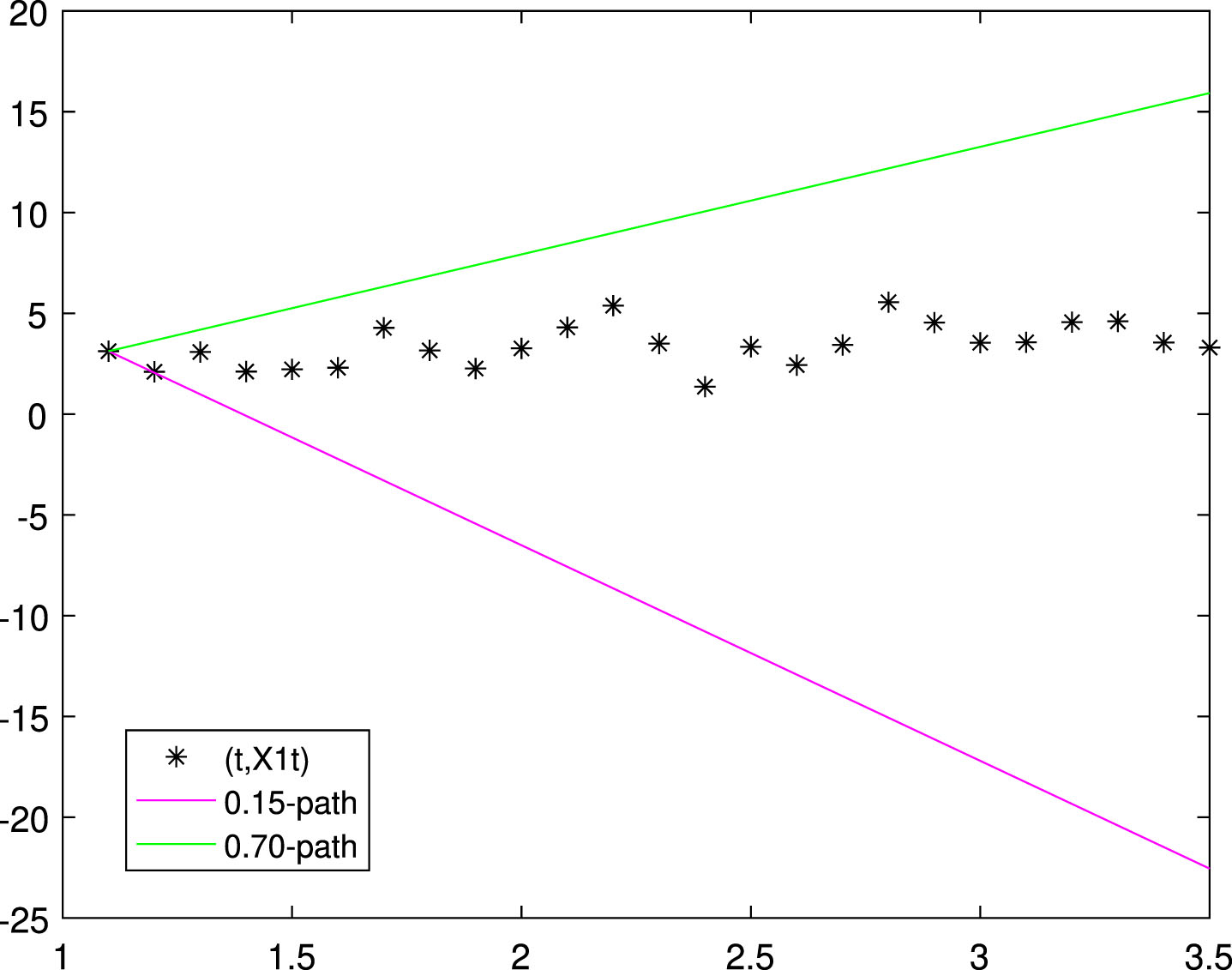
Observations and α-path of X1t in Example 4.

Observations and α-path of X2t in Example 4.
After graphing the observed values, we can visually see that the observations are all sandwiched by two α-paths. Therefore, it can be intuitively judged that the parameter estimation results are reasonable.
The data for the parameter functions in Example 4
In order to be objective and rigorous, we perform hypothesis tests on the parameter results. For the parameter function k1i (μ1, σ1), the test for the hypotheses:
W= {(k1(1), k1(2), ⋯ , k1(24)): there are at least 1.2 of indexes i’s with 1 ≤ i ≤ n such as
where
However, for each i = 1, 2, ⋯ , 24, k1i∈ [-2.0198, 2.0198]. Therefore, ((k1(1), k1(2), ⋯ , k1(24)) ∉ W. The original hypothesis H0 holds and
For the parameter function k2i (μ2, σ1, σ2), the test for the hypotheses:
W= {(k2(1), k2(2), ⋯ , k2(24)): there are at least 1.2 of indexes i’s with 1 ≤ i ≤ n such as z i < -2.0198 or z i > 2.0198}.
For any i = 1, 2, ⋯ , 24, k2i∈ [-2.0198, 2.0198]. Therefore, (k2(1), k2(2), ⋯ , k2(24)) ∉ W. The original hypothesis H0 holds and
In summary, the parameter estimates obtained by generalised moment estimation are reasonable.
Observed datas in Example 5
Parameter estimation is required only for the second and third equations in the set of equations. For the second equation, the minimization problem can be obtained from the generalized moment estimate:

Observations and α-path of X t in Example 5.
According to equation (6), the corresponding minimization problem for the third equation is:
where
The differential equation to be evaluated is

Observations and α-path of σ t in Example 5.
All of the observations are visible as falling between the two alpha-paths. The parameter estimates are then objectively tested using hypothesis testing. For the parameter function k1i (μ), the test for the hypotheses:
W= {(k1(1), k1(2), ⋯ , k1(44)): there are at least 2.2 of indexes i’s with 1 ≤ i ≤ n such as
where
However, for any i = 1, 2, ⋯ , 44, k1i∈ [-2.0198, 2.0198]. Therefore, (k1(1), k1(2), ⋯ , k1(44)) ∉ W. The original hypothesis H0 holds and
The data for the parameter functions in Example 5
For the parameter function k2i (k, θ, σ), the test for the hypotheses:
W= {(k2(1), k2(2), ⋯ , k2(44)): there are at least 4.4 of indexes i’s with 1 ≤ i ≤ n such as
where
Due to the k2(1), k2(30) and k2(42)∉ [-1.6234, 1.6234], (k2(1), k2(2), ⋯ , k2(44)) ∉ W. Hence, the original hypothesis H0 holds and
In summary, the parameter estimates obtained by generalised moment estimation are reasonable.
The multi-dimensional uncertain differential equations (MUDEs) are very suitable choice when modeling uncertainty for some complex events. It is inevitable that the MUDEs contains some unknown parameters, and the method to estimate the value of the unknown parameters through the observed values is called the parameter estimation of the MUDEs. In this paper, the unknown parameters in MUDEs were estimated using generalized moment estimation, and the estimated cases of one-dimensional UDE were first derived and subsequently extended to the estimation of high-dimensional UDE. Optimization methods were proposed for parameters with multiple estimation results to ensure that the parameter estimation results were optimal and unique. To test the reasonableness of the estimates, we used both α-path and hypothesis testing methods. Analytical and numerical examples were given to illustrate the feasibility of the method.
Footnotes
Acknowledgments
This work was funded by the National Natural Science Foundation of China (Grant Nos. 12061072 and 62162059) and the Xinjiang Key Laboratory of Applied Mathematics (Grant No. XJDX1401).