
Abstract
This paper proposes a disturbance observer supported Takagi-Sugeno (TS) fuzzy model-based control scheme for uncertain systems. The baseline controller is a guaranteed performance fuzzy model based parallel distributed controller (PDC) which is constructed using the nominal system’s parameters. The model approximation error and parametric uncertainties are treated as a lumped disturbance and a nonlinear disturbance observer (NDOB) is introduced to counter the lumped disturbance. The applicability of the proposed scheme is demonstrated on the bilateral control of nonlinear teleoperation system in MATLAB/Simulink/QUARC environment through simulations as well as semi-real time experiments.
Keywords
Introduction
Tracking control of nonlinear systems has been widely researched in literature and many different control schemes have been proposed including sliding mode control, model predictive control, adaptive robust control, feedback linearization, back stepping control, fuzzy model based control, neural and fuzzy adaptive control, active disturbance rejection control and others. In order to improve the tracking performance, various combinations of these techniques along with observers have also been discussed [1, 2]. The present study is also a step in this direction and combines a fuzzy model based scheme with a nonlinear disturbance observer for regulating the system’s states under uncertainties.
Takagi-Sugeno fuzzy modeling and control framework has been proved to be effective in the control of nonlinear systems. As a first step, nonlinear system is first converted into a TS fuzzy plant model over a compact set by using sector nonlinearity technique. This TS fuzzy plant model is a set of IF-THEN rules with linear models, defined for different operating points, as the consequents which are blended through fuzzy membership functions to yield a fuzzy version of the nonlinear system. A popular TS fuzzy controller for the TS fuzzy plant model is known as parallel distributed compensation control which uses the same plant rules to adjust the feedback gains [3]. A variant of this controller is proposed with lower computational cost and is termed as proportional parallel distributed compensation [4]. Another type of PDC controller is proposed with numerator-denominator structure to guarantee the desired closed loop performance [5]. In another study, PDC technique is combined with nonlinear regulation theory to yield an exact output TS fuzzy regulator [6]. In [7, 8] PDC method is used to design robust control for a class of nonlinear system represented via Takagi-Sugeno (T-S) fuzzy bilinear model. Observed based PDC controller with disturbance rejection ability is proposed in [9] where a two-stage LMI procedure is devised to solve the control gains. Disturbance observer is integrated with an LMI based PDC controller in [10] for an active seat suspension. A polynomial fuzzy model based control is presented in [11] where lumped disturbance is compensated using a disturbance observer.
This paper proposes to integrate a nonlinear disturbance observer with a numerator-denominator type TS fuzzy PDC controller to robustify the closed loop regulation performance against the lumped parametric uncertainties and model approximation error. Based on the principle of separation, design of observer and controller are carried out separately. PDC controller design takes into account the double summation and coefficient varying properties of nominal TS fuzzy system and employs time-invariant coefficients to further impose a desired closed loop performance. Nonlinear disturbance observer is designed to estimate the terms associated with plant parameter variations as well as the model approximation error. This estimated disturbance is cancelled from the nominal controller to recover the performance. Finally, we demonstrate the application of the proposed robust controller on bilateral teleoperation system where slave manipulator tracks the motion of the master manipulator despite the presence of parametric uncertainties and model approximation errors of master and slave systems.
This paper is structured as follows: Section 2 reviews TS fuzzy modeling. Design of proposed NDOB TS fuzzy controller is described in Section 3. Simulations and semi-real time experimental results on bilateral teleoperation are presented in Section 4.
TS fuzzy modeling
Consider an nth order single input single output (SISO) nonlinear system as:
Where f n (x) & g n (x) are nonlinear functions with nominal system parameters while Δf (x) = f (x) - f n (x) & Δg (x) = g (x) - g n (x) represent the respective uncertainties.
An ‘r’ rule TS fuzzy model of nonlinear system in Equation (1) can be constructed as:
Where h
i
(z) is normalized firing strength of ith fuzzy rule i.e.
In Equation (3), first term is the model approximation error while the second term includes parametric uncertainties.
We integrate a NDOB with a baseline TS fuzzy PDC controller of [5]. This PDC controller provides a desired closed loop performance by introducing time-invariant coefficients. However, parametric uncertainties are not considered in the design procedure. To address this limitation, we propose to integrate a NDOB which can estimate the lumped disturbances and ensures robust closed loop performance. NDOB based fuzzy PDC controller is proposed as:
In Equation (4), denominator part of the control law, bi1 is a known nominal plant parameter while numerator part, d ij is to be designed against a desired closed loop performance. In Equation (5), λ is a negative constant and can be selected to be sufficiently large. By substituting Equation (4) in Equation (2), we obtain the closed loop system as:
In Equation (6), δ e is the disturbance estimation error:
Let c j , j = 1, 2, . . . , n be the coefficients which do not depend upon the time varying membership functions i.e.:
By substituting Equations (8) in Equation (6), we obtain the differential equation representation of the closed loop system as:
Now the coefficients c j , j = 1, 2, . . . , n can be chosen according to the desired dynamic response and the fuzzy implemental gains can then be determined using Equation (8). Equation (9) implies that regulation error is governed by the estimation error of NDOB. Thus, bound on the estimation error translates to the performance of the fuzzy PDC regulator. Estimation error dynamics can be written as:
Provided that disturbance and its derivative are bounded as
Bilateral teleoperation is a key framework to allow human interaction with a remote environment by providing the force feedback present in the remote environment. Over the decades, many algorithms have been proposed to improve the time delay present in the communication channel, uncertainties related to the environment and modelling errors and improving decision support mechanism [12, 13]. Consider a single degree of freedom teleoperation system as:
Let the state variables be
The degrees of memberships in Equations (13), (14) are computed as:
Where minimum value of the scheduling variable (zmin = 0.827) corresponds to the link operation around x1 = π/ 3 while maximum value (zmax = 1) corresponds to the operation around x1 = 0. The definition and numerical values of different master and slave systems’ parameters in Equations (12)–(14) are provided in Table 1.
Systems’ parameters
To establish bilateral communication between the master and slave systems, method of state convergence is used and proposed NDOB fuzzy PDC regulators are deployed on both sides, as shown in Fig. 1. Observer based control laws for the master and slave sides are defined as:
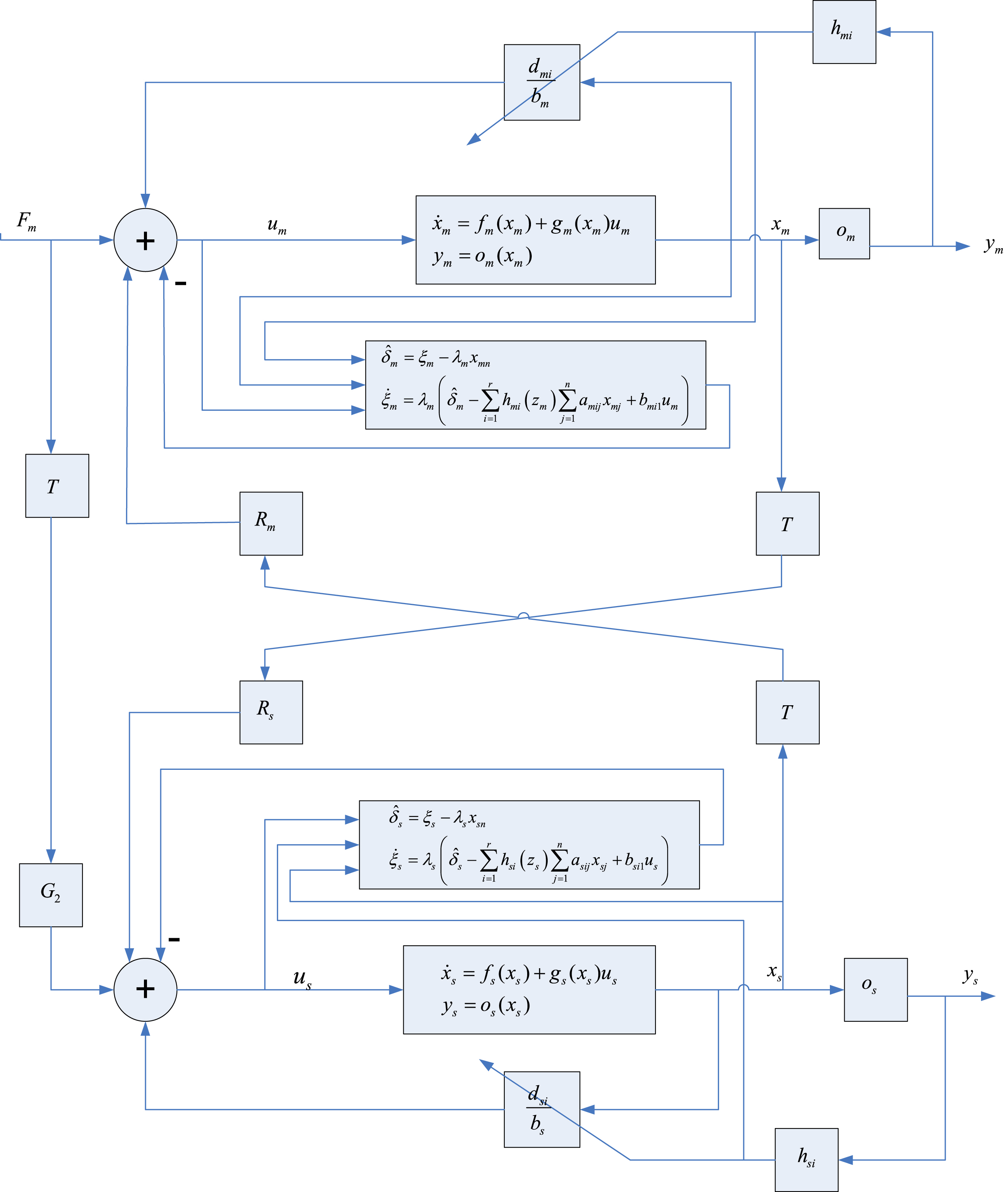
NDOB based fuzzy model-based state convergence controller for bilateral teleoperation system.
The definition of various parameters in these control laws is included in Table 2. With the help of above control laws, closed loop master and slave systems are computed, and time invariant coefficients are introduced, as described in Section 3:
Parameters of fuzzy state convergence scheme
Where ai1 = m n gl n z i / J n and ai2 = B n / J n . The resulting closed loop master and slave systems are now in a suitable form for the method of state convergence to be applicable. Interested readers are referred to [14, 15] for details on this bilateral scheme. To determine the control gains of the scheme including the NDOB-integrated fuzzy PDC regulators, following design conditions need to be solved:
By assuming stiffness of environment as k e = 5Nm/rad with k f = 0.1 and selecting the desired response of the slave as well as error systems as s2 + 20s + 100 = 0 (p1 = q1 = p2 = q2 = -10), we obtain following control gains as a solution of Equations (19)–(25):
Control gains for fuzzy PDC regulators are derived using (18) along with nominal parameters as:
We now simulate fuzzy PDC driven bilateral teleoperation by applying a constant operator’s force of 1 N. First, uncertain teleoperation system is run without utilizing NDOB and the system response is plotted in Fig. 2. It can be seen that position error exists between the master and slave systems due to the discrepancy in actual and nominal parameters. Also, difference can be seen in the desired and actual slave response. Now, NDOB (λ m = λ s = -50) is switched on and simulation results are depicted in Fig. 3. It can be seen that NDOB based fuzzy PDC regulator recovers the performance as slave tracks the master with zero steady state error and exhibits the desired behavior also. Disturbances on the master and slave sides are well estimated and compensated by NDOB as displayed in Figs. 3(c)-(d). Results in Figs. 2,3, Figs. 2,3 also serve the purpose of comparison of proposed disturbance observer based fuzzy PDC technique with fuzzy PDC. Comparison with other fuzzy PDC techniques involving disturbance observer is not provided as they do not offer desired dynamic performance and thus state convergence controller with desired slave response cannot be constructed to establish bilateral communication.
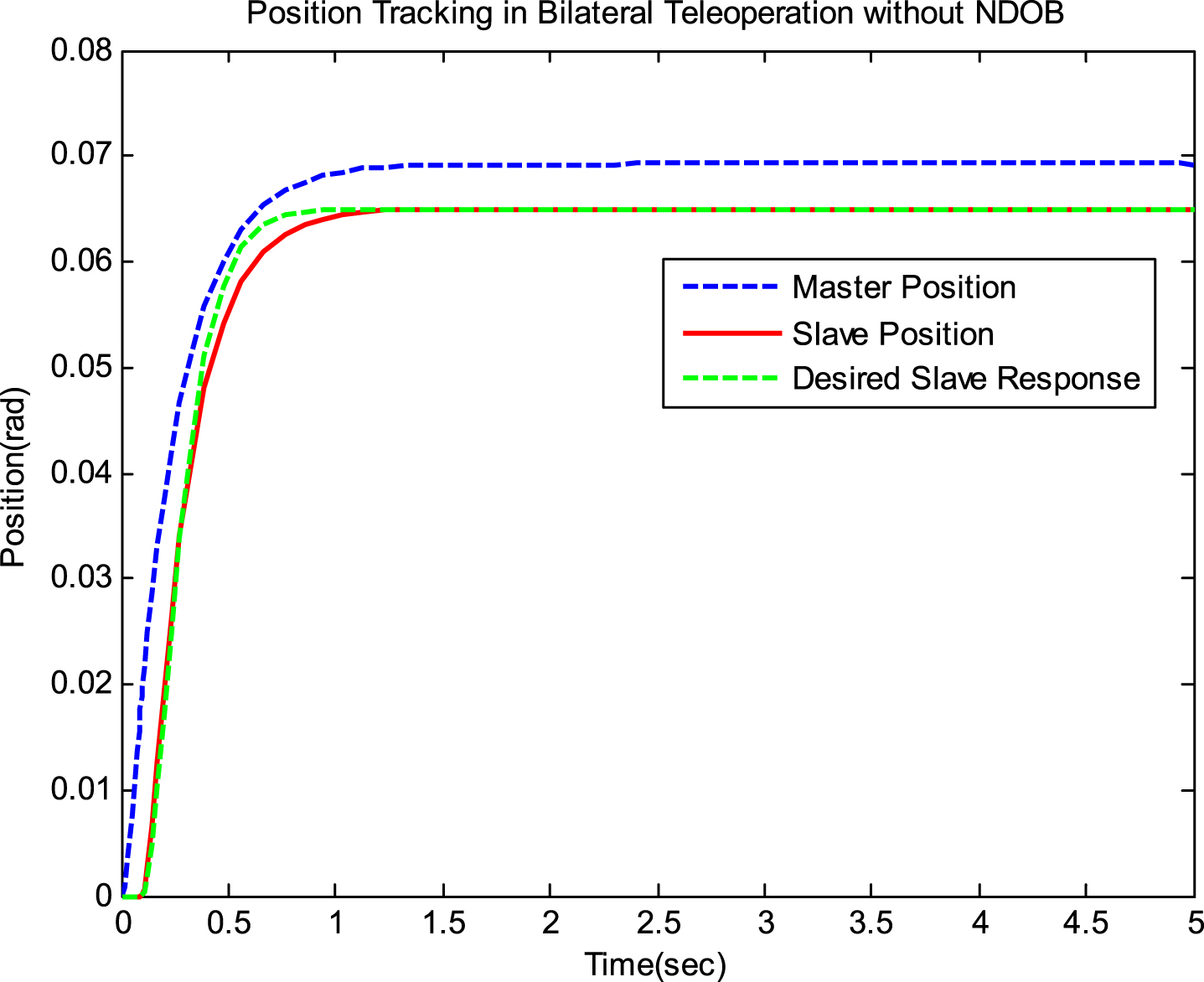
Fuzzy model based SC convergence controller under parameter variations without NDOB [10].
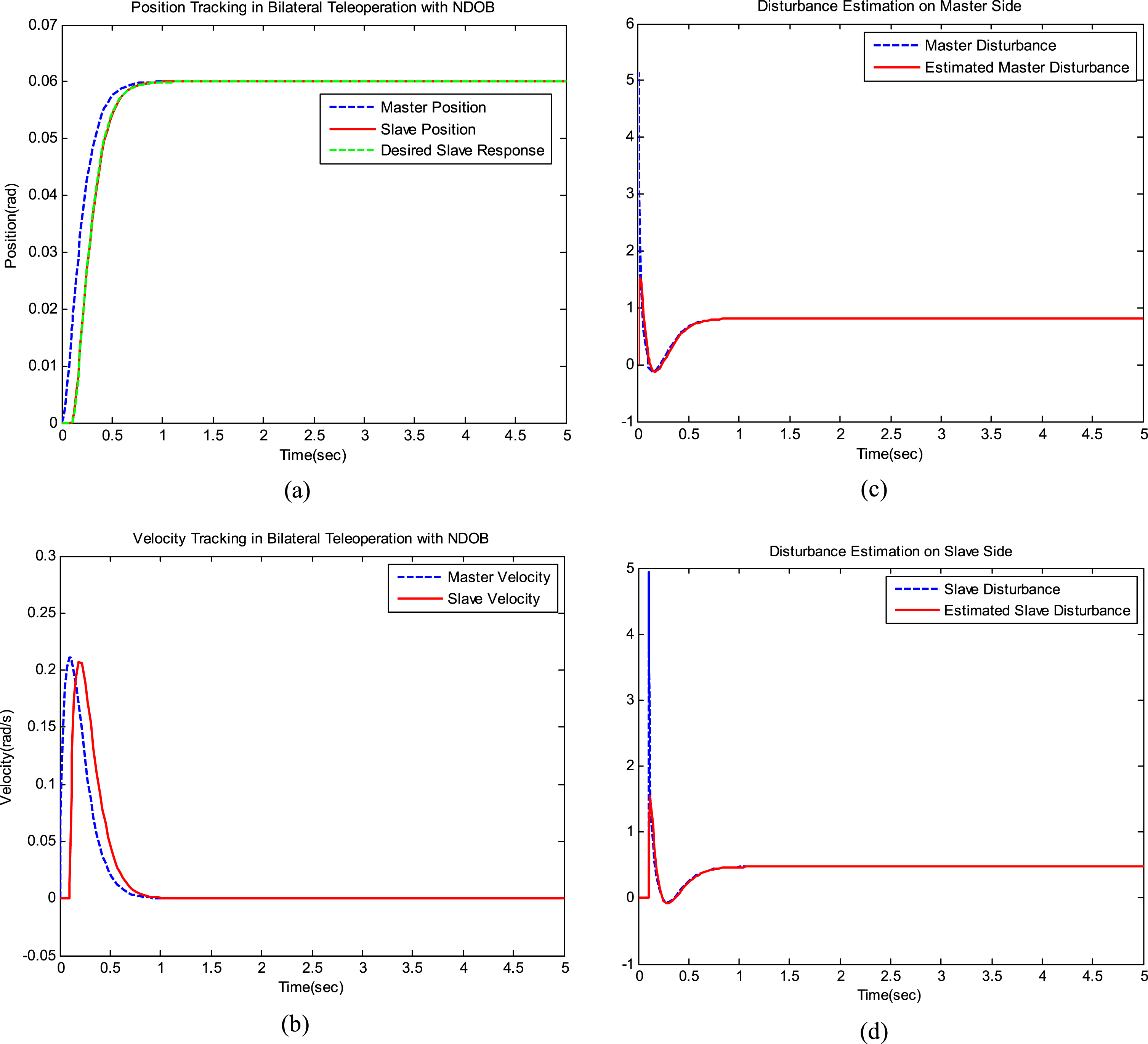
Simulation results of NDOB-Integrated fuzzy model-based SC convergence bilateral controller under parameter variations (a) Position tracking (b) Velocity tracking (c) Disturbance estimation on master side (d) Disturbance estimation on slave side.
Finally, we perform semi-real time experiments using QUARC/Simulink environment using a haptic device and a virtual slave system. Experimental setup is shown in Fig. 4. Experiment is initiated by
Experimental setup.
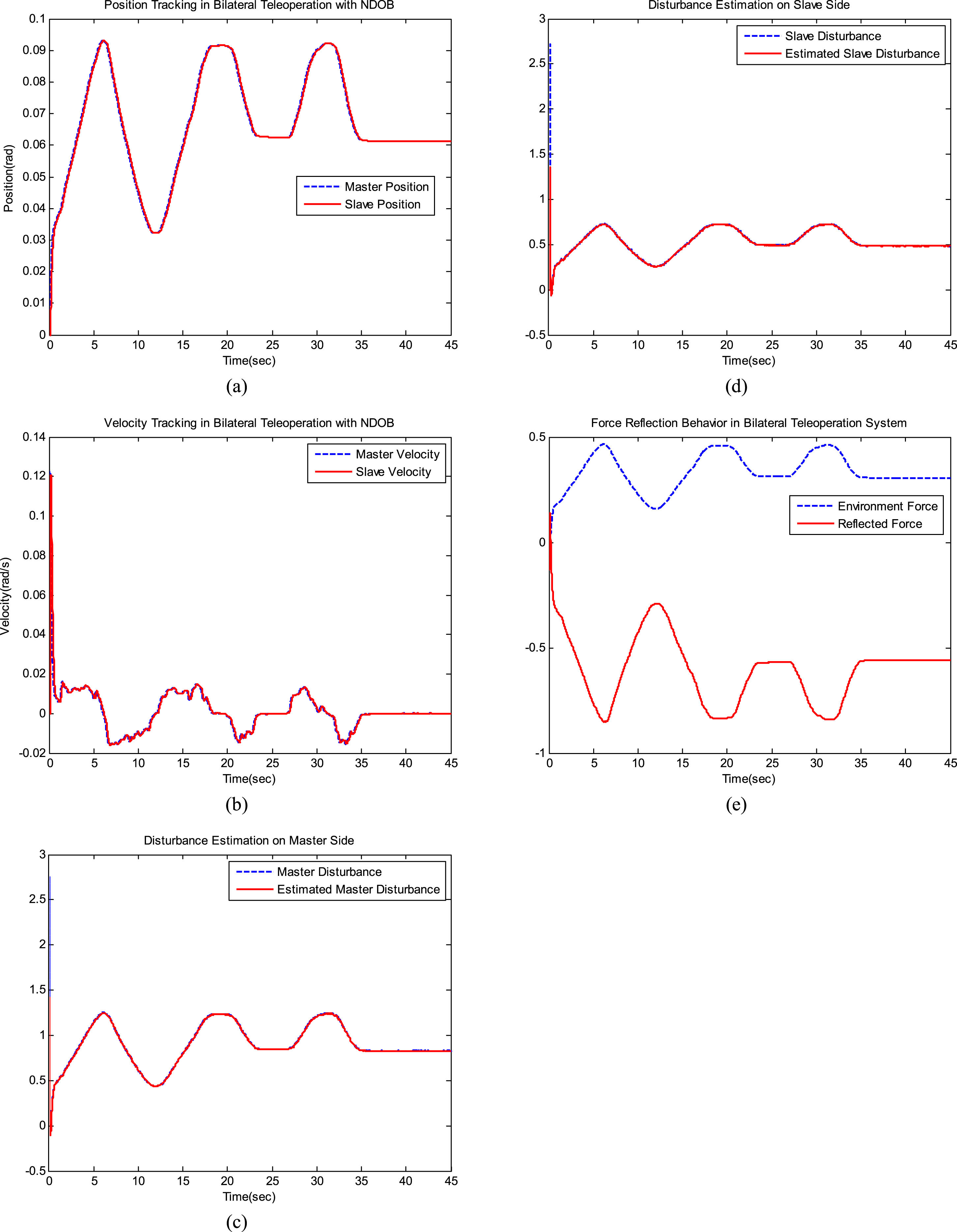
Experimental results of NDOB-Integrated fuzzy model-based SC convergence bilateral controller (a) Position tracking (b) Velocity tracking (c) Disturbance estimation on master side (d) Disturbance estimation on slave side (e) Force reflection behavior.
In this paper, design of a disturbance observer based fuzzy PDC controller is presented for regulation task in uncertain nonlinear systems. A numerator-denominator type PDC controller can offer desired dynamic performance. However, its performance is deteriorated in the presence of parametric uncertainties. To recover its performance, a nonlinear disturbance observer is designed which takes into account the parametric uncertainties as well as modeling errors. The proposed NDOB based fuzzy PDC controller is applied to a bilateral teleoperation system where slave manipulator is required to track the master manipulator while exhibiting a desired behavior. Simulations as well as experimental results confirm the validity and effectiveness of the proposed robust regulation scheme. In future, proposed regulator will be used to control more complex systems.