
Abstract
Zhan and Jiang defined covering-based compact and loose variable precision fuzzy rough set models. Soon after, they proposed a reflexive fuzzy β-neighborhood operator and defined a covering-based generalized variable precision fuzzy rough set. Based on them, in this paper, we use the reflexive fuzzy β-neighborhood operator to establish two covering-based generalized variable precision fuzzy rough set models, which are called covering-based generalized compact and loose variable precision fuzzy rough set models, respectively. Then, we investigate the important properties of the two rough set models and their relationship to the original models. Finally, we apply the covering-based generalized compact variable precision fuzzy rough set model to decision-making problems. A simple example is given to verify the validity of the model and compare the results with other models.
Introduction
Pawlak [24] proposed rough set theory in 1982, which can approximately describe any subset of a universe by using two definable subsets: the upper and lower approximations [5] of sets. Rough set theory can deal with uncertainty and incompleteness in information system and data analysis. One of the basic assumptions of rough set theory is the indiscernibility relation between objects. It is defined by a partition of equivalence relations. Therefore, Pawlak rough sets have some limitations [24]. To overcome this shortcoming, researchers began various generalizations. Many researchers replace equivalence relations or partitions with general binary relations [29, 30] or concepts such as neighborhood systems and Boolean algebras [32]. Since covering is a generalization of partition, many researchers naturally extend it to covering-based rough sets. Among them, Zakowski [40] firstly extended the equivalence class to covering and proposed the covering-based rough set model. However, the upper and lower approximation operators of this model do not satisfy the duality property. In order to solve this problem, Pomykala [25] studied approximation operators in approximation space and he defined two pairs of dual approximation operators: covering-based compact rough set model and covering-based loose rough set model. The results have been widely recognized and popularized by researchers. Yao and Yao [37] proposed a covering-based rough set approximation method on the basis of neighborhood system. Zhu and Wang [45] introduced three types of covering rough set models. Xu and Zhang [33] introduced roughness measurement of covering-based generalized rough set model. In particular, in 1998, Yao [36] proposed a covering rough set model based on neighborhood system on the basis of the concept of neighborhood and granularity. Then some covering rough set models based on neighborhood and topological properties of upper and lower approximation operators in combination with topology was studied by Ma [18]. After that, he also discussed twin approximation operators in covering approximation spaces [19]. In 2016, D′eer et al. [10] classified the neighborhood operators in the covering approximation space in detail and constructed a partial order among these neighborhood operators. These studies have greatly advanced the field. However, covering rough set also has limitations, and it can only be used for symbol data processing, so fuzzy subset theory was introduced, and then researchers put forward a new model.
Fuzzy sets are different from rough sets. Fuzzy sets are used to deal with qualitative data. They can deal with fuzzy concepts and some indiscernibility relation effectively. But fuzzy subset faces great limitations when dealing with real valued data sets [12]. As we know, attribute values in database may be symbol values or real values, so both rough set theory and fuzzy subset theory are needed when dealing with uncertain and incomplete information in information system. In 1990, Dubois and Prade [7] first proposed the concept of fuzzy rough set which can effectively deal with real values data. Radzikowska and Kerre [26] defined the upper and lower approximation operators of fuzzy subsets using the general boundary implicators in 2002. After that, fuzzy rough set model based on fuzzy logic operator has been studing by many researchers. Hu and Wong [21] constructed generalized interval valued fuzzy rough set and generalized interval valued fuzzy variable precision rough sets on the basis of fuzzy logic operators. In addition, L-fuzzy rough set is studied on the basis of constructional method and axiomatic method. Similar to the thought of studying classical rough sets, people began to replace fuzzy relation with fuzzy covering. Similarly, covering-based fuzzy rough set model was defined. For example, Li et al. [16] studied two pairs of covering-based fuzzy rough approximation operators, which are called covering-based compact fuzzy rough approximation and covering-based loose fuzzy rough approximation respectively. Subsequently, D′eer et al. [8] defined four types of fuzzy neighborhood operators and studied their related properties. In addition, Ma [20] introduced the concepts of fuzzy β-covering and fuzzy β-neighborhood, and he came up with two covering-based fuzzy rough set models. Many researchers have also generalized [23, 38] this finding.
However, these rough set models have a common problem: it is sensitive to the classification of data, that is, each object is required to obtain an evaluation value of 1 on at least one criterion. As a result, they are limited in the process of use. Then, researchers began to explore the stability of rough set models. Ziarko [41] proposed a variable precision rough set model based on the classical rough set. Subsequently, many people use the idea of variable precision [3, 31] to study fuzzy rough sets. Zhao et al. [44] proposed a variable precision fuzzy rough set model. On the basis of fuzzy logic operator and the thought of variable precision, Jiang et al. [13] defined a covering-based variable precision fuzzy rough set on fuzzy β-covering, and studied its application in multi-attribute decision making. After that, Jiang and Zhan [14] defined the covering-based compact variable precision fuzzy rough set model and the covering-based loose variable precision fuzzy rough set model, and their related properties were studied. Recently, they defined a kind of reflexive fuzzy β-neighborhood [43] on fuzzy β-covering approximation space, and defined a covering-based generalized variable precision fuzzy rough set model [43] on fuzzy logic operator and the thought of variable precision, then a new multi-attribute decision making method was established.
Fuzzy set [11, 27] and rough set [1, 35] have made irreplaceable achievements in describing uncertain problems. So in this paper, we will combine the advantages of covering-based fuzzy rough set and the thought of compact and loose, to introduce the thought of compact and loose into the covering-based variable precision fuzzy rough set model. Then we study two kinds of covering-based generalized variable precision fuzzy rough set models and discuss their properties. This model can reduce the requirement of attribute values, that is, the object doesn’t have to obtain an evaluation value of 1 to satisfy some conclusions. Moreover, this model is a generalization of [14], and it can be used in a wider range, for example in decision-making problems.
The rest of this paper is organized as follows. Section 2 reviews the main results from existing studies about fuzzy logic operator, fuzzy neighborhood, and fuzzy covering. The major contributions of this paper are covered in Sections 3, 4 and Sections 5. In Section 3, the covering-based generalized compact and loose variable precision fuzzy rough set models are defined. And some of their detail properties are studied in Subsections 3.1 and 3.2. Section 4 presents the relationship of lower and upper approximations for two kinds of newly defined fuzzy rough sets, and their relationship to the original model. Section 5 presents an example using covering-based generalized compact variable precision fuzzy rough set model to illustrate the model’s effectiveness and variety. It can provide decision makers with more options. Section 6 is a summary of this paper.
Preliminaries
In this section, we present some concepts such as t-norm, R-implicator, fuzzy β-neighborhood, fuzzy topology and so on.
Fuzzy logic operator
(1)
(2)
(3)
(4)
Further, if for an arbitrary index set Λ and ∀i ∈ Λ u, v
i
∈ [0, 1],
The most popular t-norms are:
•the standard min operator:
•the algebraic product:
•the Łukasiewicz t-norm:
Further, if
(1)
(2)
(3)
The most popular R-implicators are:
•the Łukasiewicz implicator:
•the Kleene-Dienes implicator:
•the Godel implicator: for all u ≤ v,
•the Gaines implicator: for all u ≤ v,
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Fuzzy covering, fuzzy neighborhood and fuzzy topology
Fuzzy subsets
(1)
(2)
The pair
(1)
(2)
(3)
(4) if γ ≤ λ, then
(5) if F ⊆ H, then
(6)
(7)
(8)
(9)
(10)
(1) For all constant α ∈ [0, 1],
(2) For all
(3) For all
Covering-based generalized compact and loose variable precision fuzzy rough set models
In this section, on the basis of Definition 2.13, two pairs of fuzzy rough sets are defined, which called covering-based generalized compact variable precision fuzzy rough set and covering-based generalized loose variable precision fuzzy rough set. Moreover, their detail properties are also studied.
The pair
(2) When γ = 0, the covering-based generalized compact and loose variable precision fuzzy rough set models in Definition 3.1 becomes the following forms: for all a ∈ X,
The pair
(3) Fuzzy neighborhood operator
(4) If F is a classical set, then Definition 3.1 becomes the following forms: for all a ∈ X,
Properties of covering-based generalized compact variable precision fuzzy rough set model
The properties of covering-based generalized compact variable precision fuzzy rough set model are studied in this section. For the unsatisfied property, we give the necessary and sufficient conditions to make it hold.
(1)
(2)
(3)
(4) If γ ≤ λ, then
(5) If F ⊆ H, then
(6)
(7)
(8)
(9)
(10)
(9)
Moreover,
γ ∨ F (c′)))))
γ ∨ F (c′)))))
So, we get
And then from Proposition 3.3 (2) we can get
In conclusion,
Similarly, we have
(10)
That is to say,
Similarly, we have
□ In general, the following conclusions does not hold for approximation operators
Let
Fuzzy β-neighborhood (β=0.60) of object a i
Suppose that two fuzzy subsets on X are defined as follows:
So, we will discuss the conditions that approximation operators
(1)
(2)
(1) For all constant α ∈ [0, 1],
(2) For all i ∈ Λ, if
(3) If
(2) For any
(3) That’ Let
(1) For all constant α ∈ [0, 1],
(2) For all i ∈ Λ, if
(3) If
□
(1) For all
(2) For all
(⇐) Let
(2) This proof is similar to that of (1). □
The properties of covering-based generalized loose variable precision fuzzy rough set model are studied in this section. And we give an example to show that the two new models are different.
(1)
(2)
(3)
(4) If γ ≤ λ, then
(5) If F ⊆ H, then
(6)
(7)
(8)
(9)
γ ∨ F (c′)))))
γ ∨ F (c′))))))
γ ∨ F (c′))))))
( γ ∨ F (c))))))
So, we get
Similarly, we have
And,
The relationship between the two models
The relationship between covering-based generalized compact and loose variable precision fuzzy rough set models is studied in this section.
(1)
.
(2)
.
(1)
(2)
So,
Therefore,
And then from Proposition 3.3 (2) we can get
(2) This proof is similar to that of (1). □
In Fig. 1,→ represents the partial order relation ⊆ of these models. For example,
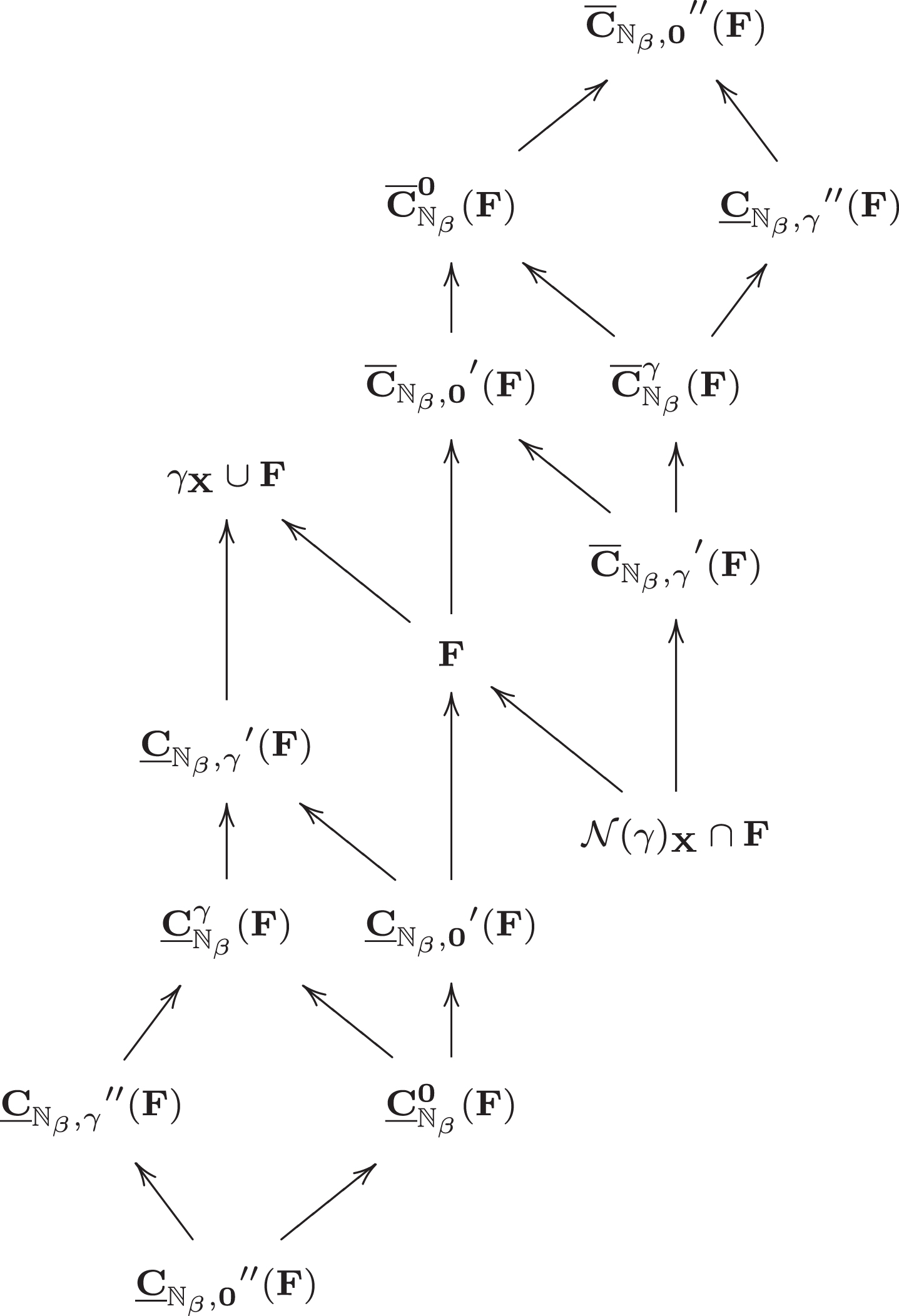
Partial diagram of the relationships among covering-based generalized compact and loose variable precision fuzzy rough set models and the other models.
In this section, we will give an application example of the new model. For the convenience of comparison, we will take the example of Reference [43] and design our algorithm by combining our rough set model with the algorithm of Reference [43].
A family plans to buy a private car. After preliminary evaluation, there are now six car models to choose from, and X = {a1, a2, a3, a4, a5, a6} represents the set of six car models.
A real-valued MADM matrix of six cars
A real-valued MADM matrix of six cars
Normalize the real-valued MADM matrix of six cars. The normalized decision-making matrix of six cars is listed as in Table 3.
The preference index among six car models is calculated according to the algorithm formula, where the preference threshold p = 0.5.
Calculate the leaving flow and entering flow of each car model according to the algorithm formula, and then obtain the average leaving flow and average entering flow. Then calculate the distance between the leaving flow and the average leaving flow for each car model and the distance between the entering flow and the average entering flow for each car model.
Finally, calculate the appraisal score for each car model, and a evaluation fuzzy set F is constructed according to the evaluation scores, which
Next, use the coverage-based generalized compact variable precision fuzzy rough set model defined in Definition 3.1 to calculate the upper and lower approximation
Besides, from Table 3, we can observe that
Normalized decision-making matrix of six cars
Fuzzy β-neighborhoods (β=0.70) of six automobile types
From the definition of coverage-based generalized compact variable precision fuzzy rough set model in Definition 3.1, we know that the upper and lower approximation operators are defined by an implicator
Then, we compute the overall evaluation value V i of every car, which are shown as follows: V1 = 0.9247, V2 = 0.9154, V3 = 0.9475, V4 = 0.8874, V5 = 0.9539, V6 = 0.9219. Therefore, the ranking result of six cars is a5 ≻ a3 ≻ a1 ≻ a6 ≻ a2 ≻ a4. In this case, we find that the car a5 is the optimal car.
Then, we compute the overall evaluation value V i of every car, which are shown as follows: V1 = 0.8870, V2 = 0.8580, V3 = 0.8736, V4 = 0.8429, V5 = 0.8655, V6 = 0.8484. Therefore, the ranking result of six cars is a1 ≻ a3 ≻ a5 ≻ a2 ≻ a6 ≻ a4. In this case, we find that the car a1 is the optimal car.
We can see that the best model in Reference [14] is the same in both cases. But the best car model for the six car models is different in both cases in this article. The best car model obtained by the decision generated by the R-implicator is a5, and the best car model obtained by the decision generated by the S-implicator is a1. That means decision makers have more options. Decision makers can choose different decision algorithms according to their own needs and personal preferences.
In this paper, we defined two pairs of rough approximations on the basis of fuzzy rough set and variable precision rough set: covering-based generalized compact variable precision fuzzy rough set and covering-based generalized loose variable precision fuzzy rough set. Furthermore, we studied their properties. We also give their necessary and sufficient conditions for some unsatisfied properties. Furthermore, we discussed the relationship between two pairs of fuzzy rough set models, and we also discuss the relationship between these two new models and the original models. At the end of this article, we give an example to verify the validity of the new model and compare the results with other models.
Funding
This work is supported by National Natural Science Foundation of China (No. 12171220) and Natural Science Foundation of Shandong Province (No. ZR2020MA042).
Compliance with ethical standards
Conflicts of interest
The authors declare that there is no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.