
Abstract
Almost all exact inversion methods provide inverse solutions for only one input variable of fuzzy systems. These methods have certain limitations on the fuzzy system structure such as monotonic rule bases, singleton rule consequents, and invertibility check. These requirements limit the modeling capabilities of the fuzzy systems and also may result in poor application performances. In this study, an exact analytical inversion method is presented for multi-input-single-output decomposable TS fuzzy systems with either singleton or linear consequents. In the proposed method, fuzzy system structures do not need to have monotonic rule bases, singleton rule consequents, or any invertibility conditions. Thus, more flexible fuzzy systems can be used in inverse model based applications. The proposed method provides a simple and systematic way to obtain unique inverse solutions of all input variables simultaneously with respect to any desired system output value. For this purpose, an inversion trajectory approach that guarantees the existence and uniqueness of the inverse solutions is introduced. The inversion trajectory consists of a set of paths defined on the specific edges of universe of discourses of the decomposed fuzzy subsystems. Using this approach, the inverse definition of the overall fuzzy system can easily be derived only by inverting the related decomposed fuzzy subsystems on this inversion trajectory and then combining their inverse definitions. In this way, the inverse definition of the overall fuzzy system is obtained as consisting of analytical solutions of linear and quadratic equations for singleton and linear consequent cases, respectively. Simulation studies are given for the inversion of two and three-input-single-output fuzzy systems, and the exactness and effectiveness of the proposed method are demonstrated.
Introduction
Inverse model based approaches are widely used in many applications such as control, diagnosis, forecasting, decision making, etc [1, 40]. In these approaches, the application performance directly depends on the accuracy of the derived system model and also its invertibility. However, it is not an easy task to obtain useful mathematical models with high accuracy. Fuzzy systems provide an easy and powerful tool for the modeling of complex systems due to their universal approximation property [12, 24]. Thanks to this property, fuzzy systems are effectively used in many model based applications [11, 27]. Therefore, an inversion of a fuzzy system becomes an important issue in inverse model based applications. In literature, various inversion methods are proposed for fuzzy systems.
The methods proposed for the inversion of fuzzy systems can be classified into two main categories as approximate inversion methods [2, 34] and exact inversion methods [4, 33]. The main disadvantage of the approximate inversion methods is that their approximate solutions reduce robustness and stability. Additionally, most of the approximate inversion methods are based on iterative search algorithms such as Levenberg–Marquardt algorithm [9], Ridders algorithm [22], Newton method [2], genetic algorithms [3], and Big Bang-Big Crunch algorithm [34]. These methods need significant computation time due to their iterative nature and the convergence could not be guaranteed in each sampling time. Therefore, these methods could not be easily applicable to real-time applications. The main advantage of these approximate inversion methods is that they mostly do not need any certain limitations on the fuzzy system structure, and there is no need to check any invertibility condition.
Exact inversion methods can easily be applied to real-time systems due to their low computation time compared to iterative approximate inversion methods. Additionally, they provide higher robustness depending on the exactness of the inverse solutions. Moreover, theoretical analyses can be performed for the systems including exact inverse models of fuzzy systems. Some of the exact inversion methods use the direct rule by rule inversion techniques [28–31], and they need certain limitations on the fuzzy system structure such as strong triangular input partitioning, singleton rule consequents, and monotonic rule base. In order to eliminate the need for the monotonic rule base, various exact inversion methods are proposed based on the decomposability property of fuzzy systems [33, 39]. However, these methods have still limitations such as strong triangular input partitioning and singleton rule consequents. In [4], an exact inversion method is given for decomposable fuzzy systems with linear consequents. The inversion method which provides inverse solutions for fuzzy systems having more flexible structures is introduced in [5]. There also exist exact and approximate inversion methods proposed for interval type-2 fuzzy systems [6, 36]. In these inversion methods proposed for decomposable fuzzy systems, multiple solutions are usually obtained, and a selection criterion is required to choose one of the solutions for any application purpose [4, 32].
The above mentioned inversion methods provide inverse solutions for only one of input variables of fuzzy systems. Therefore, these methods are not suitable for solving inversion problems of multi-input-single-output (MISO) fuzzy systems. In [8], an exact inversion method is proposed for MISO TS fuzzy systems. This method uses the rule by rule inversion approach and provides exact inverse solutions for all input variables of MISO fuzzy systems. However, it is only applicable to decomposable fuzzy systems having monotonic rule bases and singleton consequents. Additionally, the invertibility of the fuzzy system needs to be checked in this method. These requirements limit the modeling capabilities of the fuzzy systems and also may result in poor application performances.
In this study, an exact analytical inversion method is proposed for MISO decomposable TS fuzzy systems with either singleton or linear consequents by using the newly introduced inversion trajectory approach. The proposed method provides unique inverse solutions for all input variables simultaneously with respect to any desired system output value. In the proposed inversion method, an appropriate inversion trajectory is determined with certain criteria on the multi-dimensional universe of discourse of the fuzzy system by evaluating system output values corresponding to vertices of all fuzzy input meshes. This inversion trajectory consists of a set of paths defined on the specific edges of the multi-dimensional universe of discourse. The combination of the related output intervals corresponding to these specific edges gives the overall output interval of the fuzzy system. In this way, the existence and uniqueness of the inverse solutions are guaranteed. Then, the inverse definition of the overall fuzzy system can easily be derived only by inverting the fuzzy subsystems on the inversion trajectory and then combining their inverse definitions. Here, the fuzzy subsystems are defined by using the matrix multiplication representation in order to provide compactness and computational simplicity in the inversion procedure. Simulation studies are done to illustrate the exactness and effectiveness of the proposed method.
The main contributions of this study can be summarized as follows. 1) The proposed method provides inverse solutions for all input variables of a MISO decomposable TS fuzzy system simultaneously. 2) The existence and uniqueness of the inverse solutions are guaranteed by the newly introduced inversion trajectory approach. 3) The exactness of inverse solutions is guaranteed since the solutions are derived in an analytical way. 4) The proposed method has the potential to improve the accuracy and robustness of inverse fuzzy model based applications by allowing the use of more flexible fuzzy systems. 5) The proposed inversion procedure is simple and straightforward. Therefore, an inverse mapping of a fuzzy system is easily derived. 6) The proposed method is very suitable for real time applications since the overall inverse mapping consists only of the parametric solutions of the first or second order equations.
The rest of the paper is organized as follows: In Section 2, preliminaries are given. In Section 3, the proposed inversion method is introduced. In Section 4, simulation studies are given to illustrate the exactness and effectiveness of the proposed method. Finally, conclusions are outlined in Section 5.
Preliminaries
Decomposable TS fuzzy systems
The fuzzy systems having special input partitioning can be decomposed into several fuzzy subsystems [19]. These fuzzy subsystems are the simplest fuzzy systems that have only two fuzzy sets for each input variable, and thus, their rule bases consist of 2 n rules. For any given input vector, the output of the overall decomposable fuzzy system is always generated by only one of its fuzzy subsystems. Therefore, the decomposition property provides a way to evaluate the overall fuzzy system as the collection of its fuzzy subsystems.
Let us consider a TS fuzzy system with n input variables, x k ∈ X k , k = 1, . . . , n, and one output variable, y ∈ Y, and assume that the input variables are defined by using the strong triangular partitioning shown in Fig. 1.
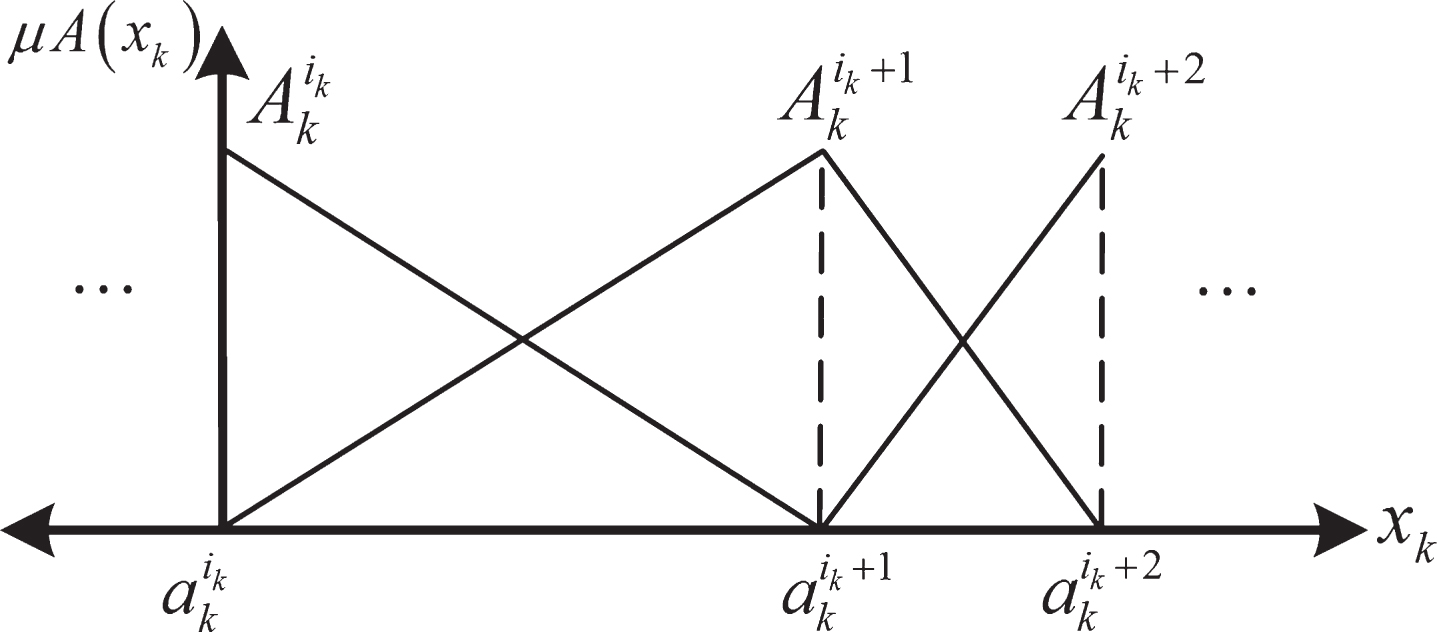
Strong triangular fuzzy partition.
The rule structure of this TS fuzzy system can be defined as [33].
This TS fuzzy system can be decomposed into fuzzy subsystems TSi1,i2,…,i
n
described by the following 2
n
rules
Here, i1, i2, …, i
n
and v1, v2, …, v
n
indicate the fuzzy subsystems to which the rule belongs and the activated rules of the related fuzzy subsystem, respectively. This decomposability property ensures that always only one fuzzy subsystem generates the output of the overall decomposable fuzzy system for given any input vector
The output of any TS fuzzy subsystem with singleton consequents,
Here, g (
The strong triangular partitioning (since
Here, the initial values are g0 = 1 and
In a similar way, the output of any TS fuzzy subsystem with linear consequents,
Here, qi,j (i = 1, … 2 n , j = 1, …, n) denotes the coefficient of the rule consequent function related to each input variable.
Let us consider a decomposed TS fuzzy subsystem with singleton consequents
The inverse definition of the decomposed fuzzy subsystem
Here
Similarly, the inverse definition of the decomposed fuzzy subsystem with linear consequents
where
Here, x
k
1
and x
k
2
denote two possible inverse solutions. However, the valid inverse solution is only x
k
which satisfies the condition of
When a fuzzy subsystem TSi1,i2,…,i
n
is considered, the universe of discourse of the fuzzy subsystem
The vertices of this hypercuboid
Figure 2 illustrates a hypercuboid
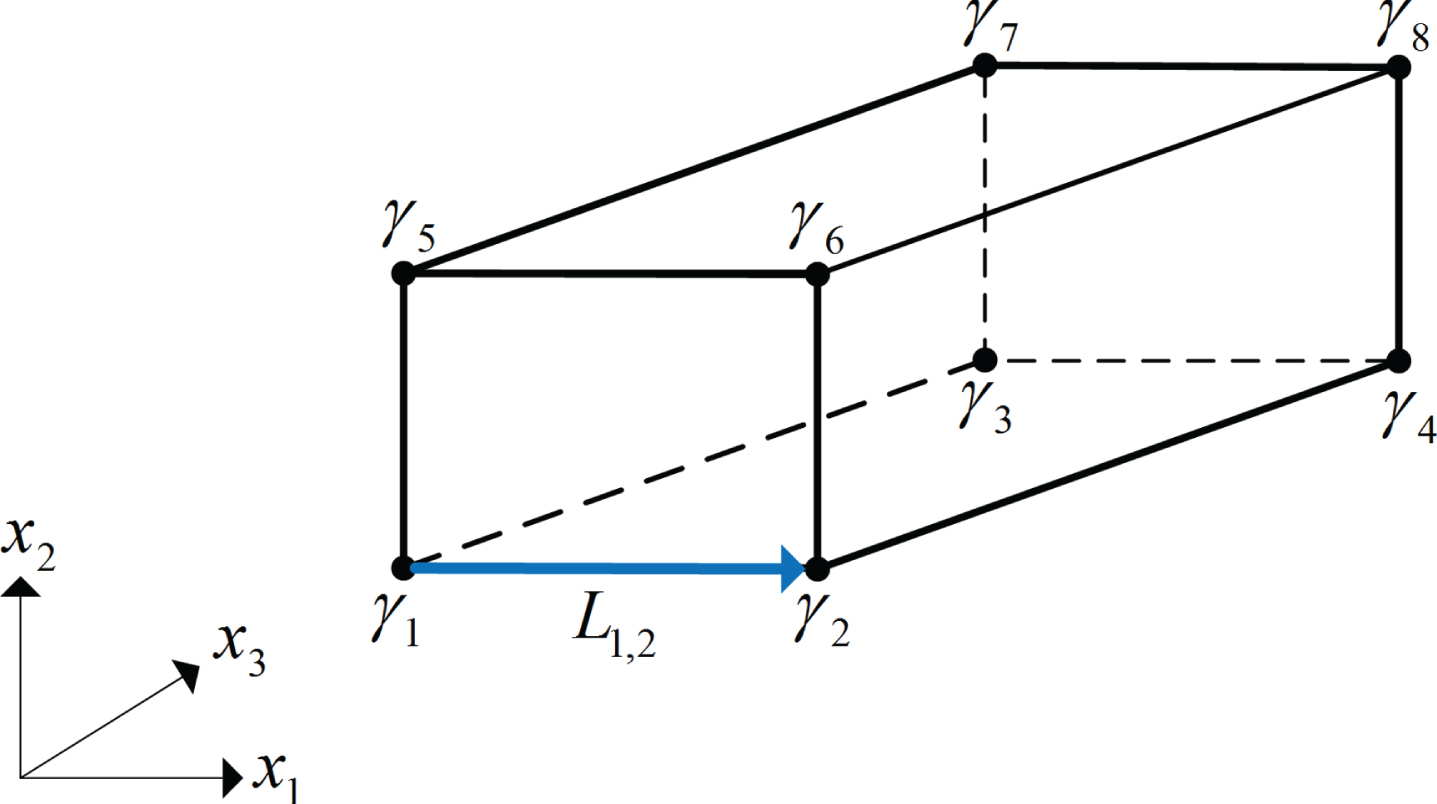
Hypercuboid universe of discourse
Let us consider an edge Lj,j+1 of
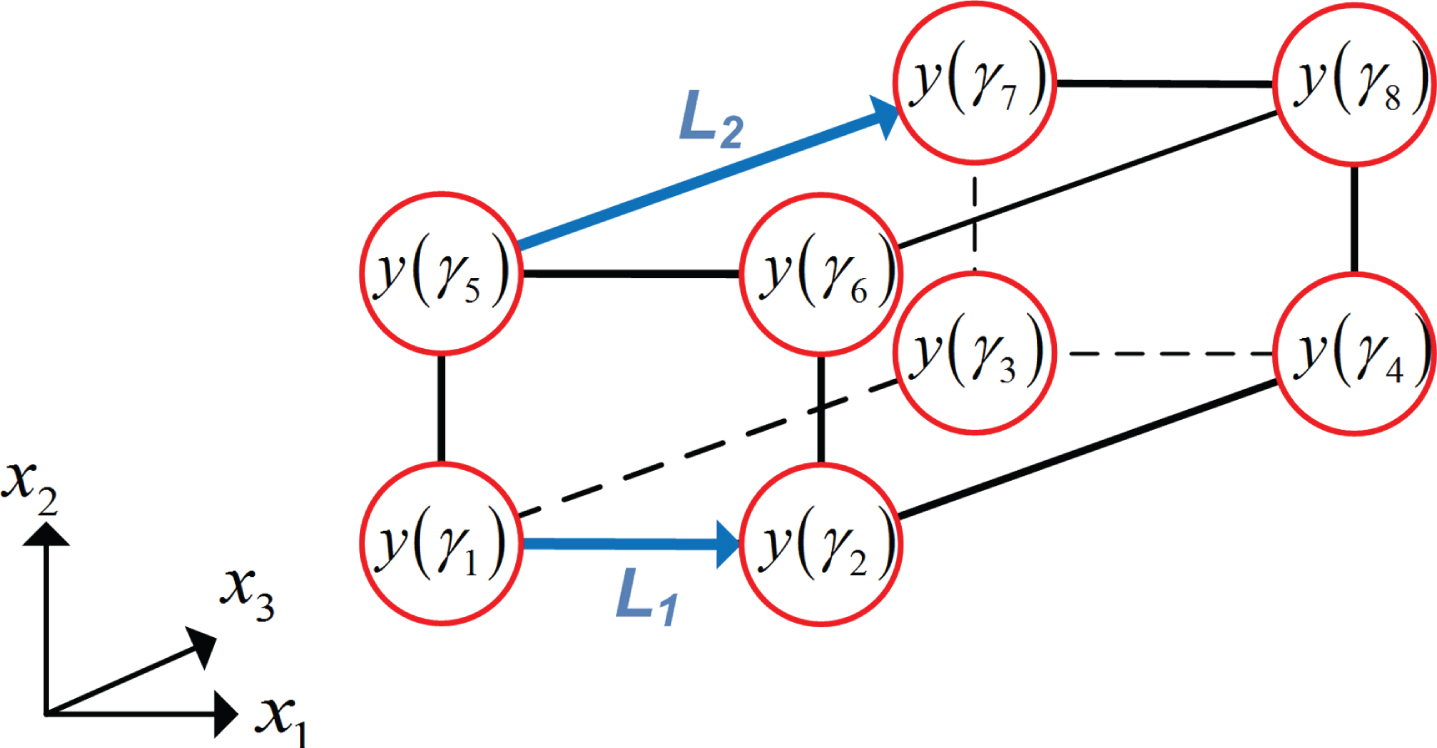
To guarantee the existence and uniqueness of the inverse solutions, the inversion trajectory must be determined with respect to certain criteria by evaluating fuzzy system output values y (γ
j
) corresponding to vertices of all
Inversion trajectory determination criteria
In addition to the criteria given in Table 1, fewer paths can be chosen in the multi-dimensional universe of discourse and these paths can be chosen from fewer fuzzy subsystems as much as possible. In this way, an inverse model with a simpler structure can be obtained. Therefore, an optimization algorithm can be used for the determination of the inversion trajectory, especially for the higher dimensional fuzzy systems.
The output interval of the overall fuzzy system consists of the combination of output intervals of specific fuzzy subsystems on the predetermined inversion trajectory. Therefore, the inverse mapping of the overall fuzzy system can easily be obtained by combining the inverse mappings of only these specific fuzzy subsystems. The inverse mapping of each related fuzzy subsystem is calculated with respect to the related single inversion variable
The proposed inversion procedure for MISO decomposable TS fuzzy systems is given in Table 2. By using the proposed procedure, an inverse mapping of a given fuzzy system can easily be determined, and unique inverse solutions for all input variables are obtained simultaneously for any desired system output value.
Proposed inversion procedure for MISO decomposable TS fuzzy systems
In order to illustrate the determination of a proper inversion trajectory, it can be assumed that n = 3 and the universe of discourse
For this case, the inversion trajectory can be determined as follows. According to Criterion-1, the inversion trajectory must start from γ1 and end at γ7. According to Criterion-2, since According to Criterion-3, since there is an overlap between
Fuzzy subsystem output values at vertices of the cuboid
Additionally, although the inversion trajectory with higher number of paths can be defined, it is determined as consisting of the minimum number of paths.
After the determination of the inversion trajectory, only L1 path is valid for the desired output values
As it is seen from the inversion procedure given in Table 2, the proposed inversion method provides inverse solutions for all input variables of the fuzzy system simultaneously. Additionally, this method does not need binding limitations on the fuzzy system structure such as satisfying invertibility conditions, having singleton rule consequents and monotonic rule bases. Therefore, the proposed method provides a way to use more flexible fuzzy systems in inversion based applications.
In this section, illustrative examples are given in order to show the exactness and effectiveness of the proposed inversion procedure. For this purpose, the inversion validation structure given in Fig. 4 is utilized [4–6, 35]. In these examples, two-input-single-output and three-input-single-output decomposable TS fuzzy systems are considered, and their inverse mappings are obtained by using the proposed inversion procedure. The inverse mapping of the fuzzy system provides the proper input values which will drive the fuzzy system output y to the desired output y d . In simulations, sinusoidal functions are used as the desired output.
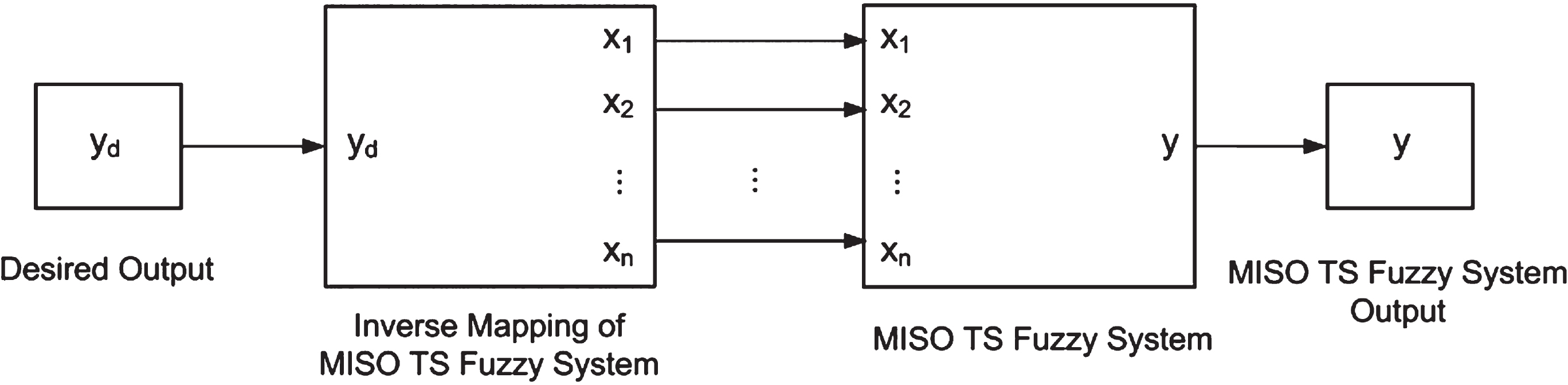
Block diagram used for the validation of the proposed inversion method.
To illustrate the exact inversion of a two-input-single-output decomposable TS fuzzy system, the fuzzy system given in Fig. 5 can be considered. The input-output mapping of the fuzzy system is shown in Fig. 6. The corresponding decomposition of the fuzzy system and the output values y (γ
j
) (given in red circles), j = 1, … 12, corresponding to the vertices of all rectangular fuzzy meshes
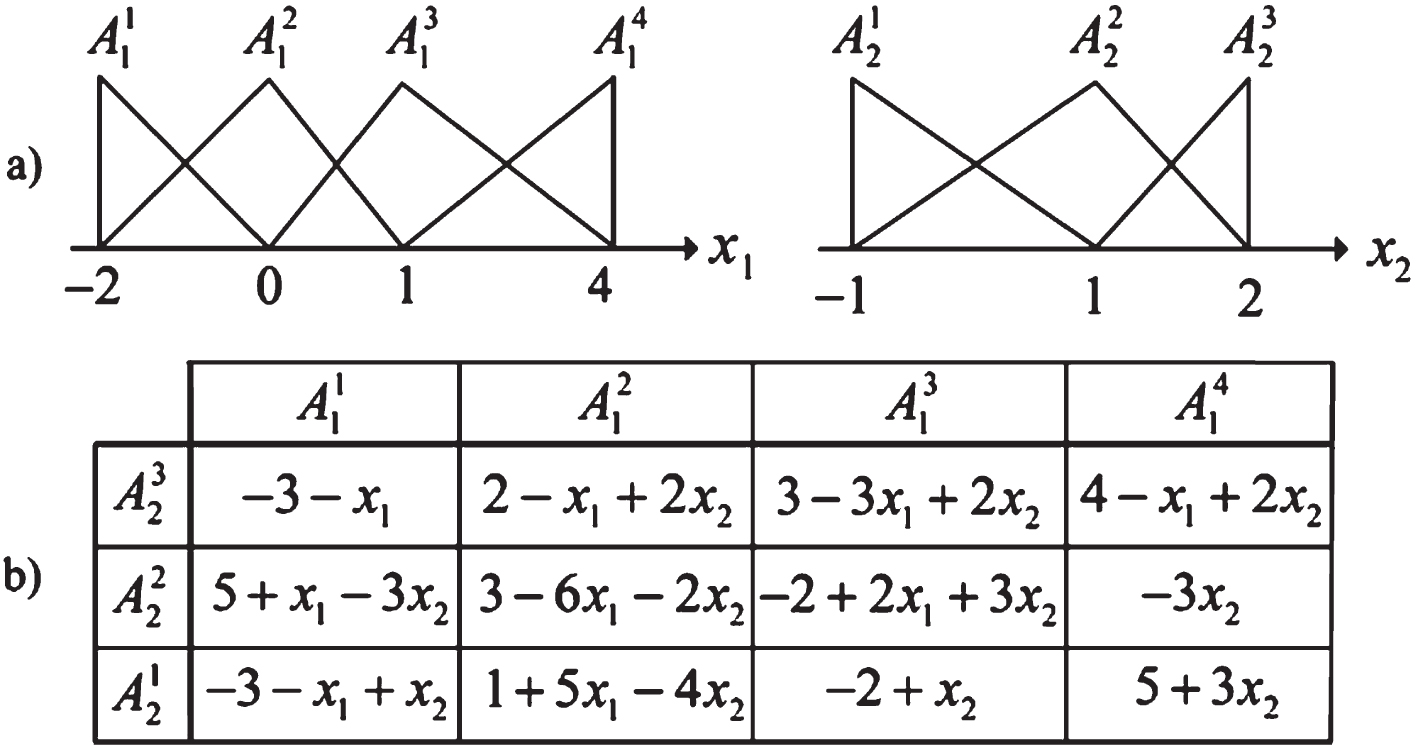
Two-input-single-output TS fuzzy system structure (a) input membership functions (b) the rule table.
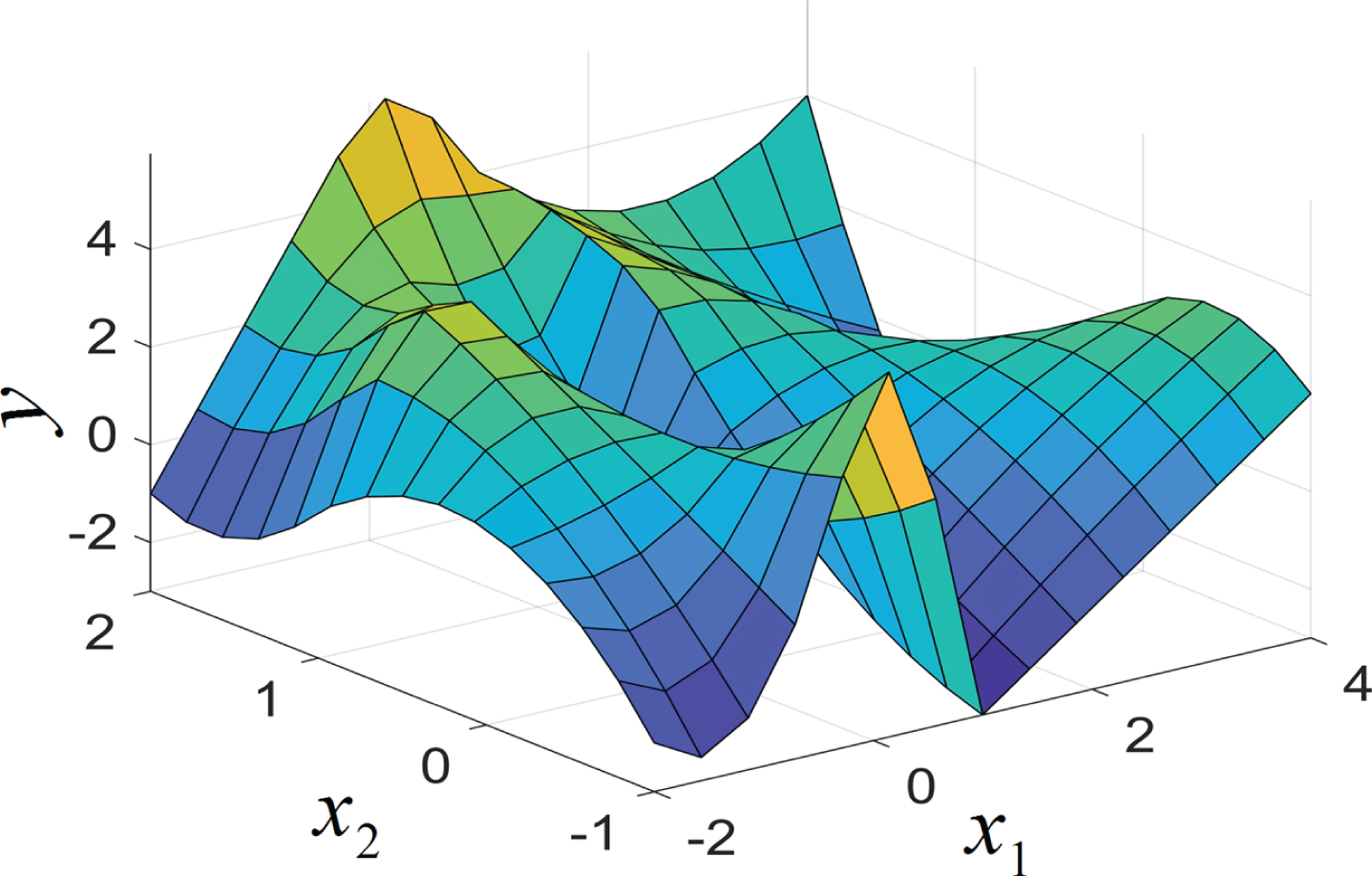
Input-output mapping of the two-input-single-output TS fuzzy system.
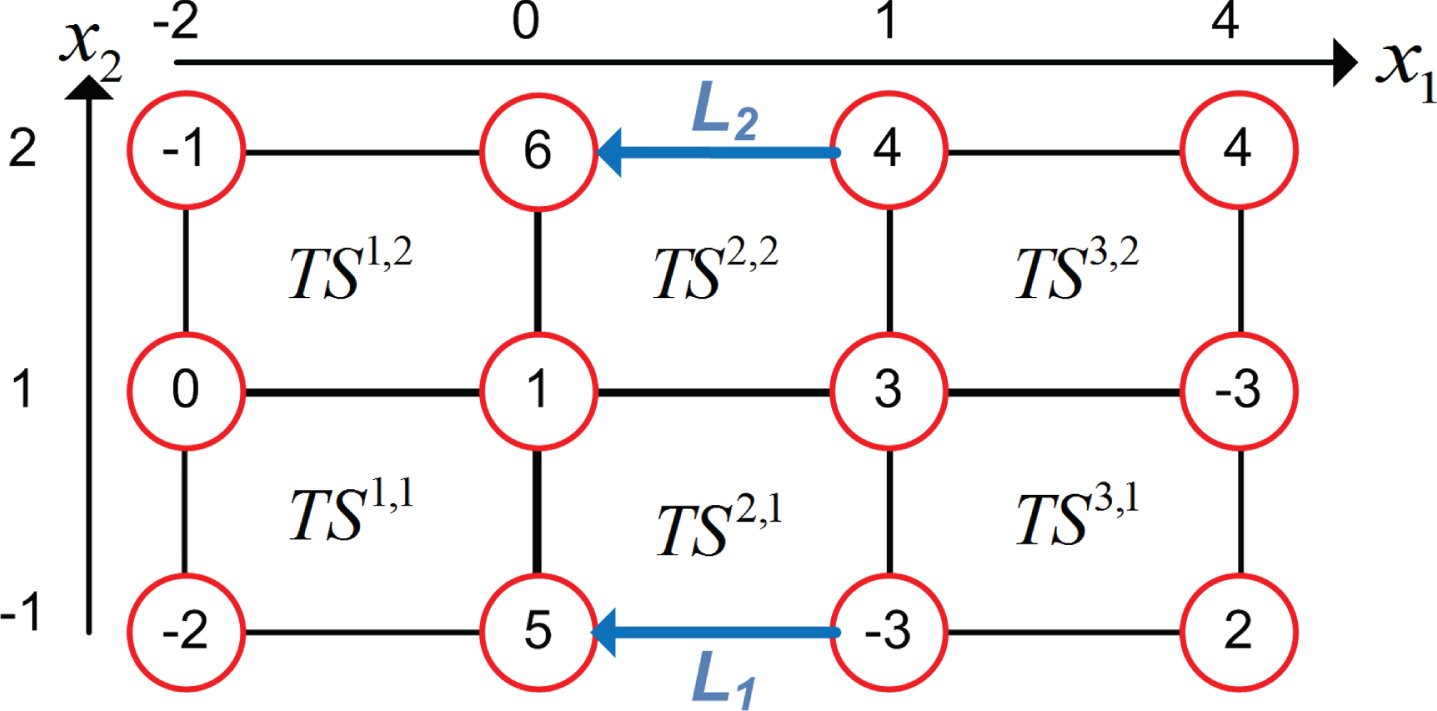
Decomposition of the two-input-single-output TS fuzzy system and the output values with respect to the vertices of all rectangular fuzzy meshes
Figures 6 7 show that the output interval of the fuzzy system is
In this case, there is an overlap between the output values of
When TS2,1 fuzzy subsystem for L1 path is considered, since the inversion variable is x1, the input variables are ordered as
For x2 = -1; L
x
vector, the generator vector g (x), and the inverse of the fundamental matrix
K2,1 matrix is calculated as follows
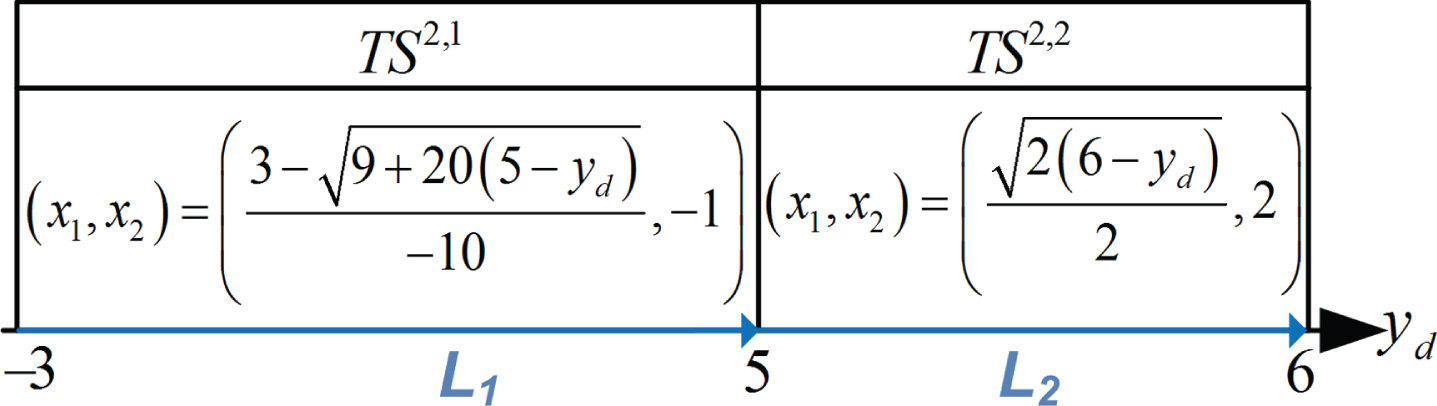
Then, the inverse mapping definition of TS2,1 in terms of x1 is obtained as
Since
Thus, considering
When TS2,2 fuzzy subsystem for L2 path is considered, the order of the input variables and L
x
vector do not change since the inversion variable is again x1. By using the same procedure, the inverse solution set for L2 path is obtained as
Finally, considering the inversion trajectory T
inv
={ L1, L2 }, the inverse mapping of the overall TS fuzzy system is obtained as
The graphical representation of the inverse mapping of the overall TS fuzzy system is given in Fig. 8.
Inverse mapping of the two-input-single-output TS fuzzy system.
Let us assume that the desired output of the TS fuzzy system is chosen as y d (k) = 4.5 sin(2πk/ 65) + 1.5. By using the inverse mapping definition of the fuzzy system obtained in Eq. (30), the calculated x1 and x2 inverse solution values with respect to the given y d are shown in Fig. 9(a). The error between the desired output and the fuzzy system output is shown in Fig. 9(b). Fig. 9(b) clearly shows that the fuzzy system output tracks the desired output y d with zero error. This validates the exactness of the inversion.
(a) Calculated x1 and x2 input values of the fuzzy system (b) the error between the desired output and the fuzzy system output.
To show the derivation of the inverse mapping of a three-input-single-output decomposable TS fuzzy system, the fuzzy system with input membership functions given in Fig. 10 can be considered. The rule table of the fuzzy system is shown in Table 3. The corresponding decomposition of the fuzzy system and the output values y (γ
j
), j = 1, … 27, (shown in red circles) corresponding to the vertices of all cuboid fuzzy meshes
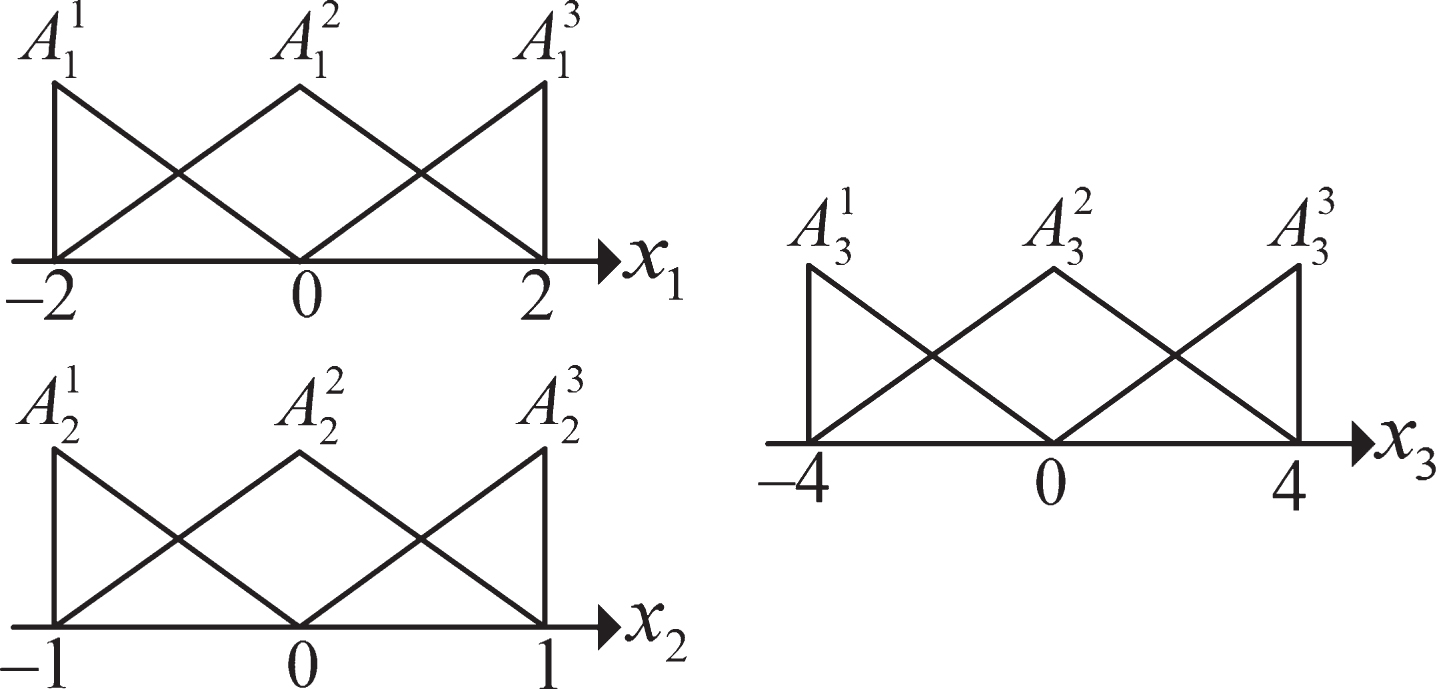
Input membership functions of the three-input-single-output TS fuzzy system.
The rule table of the three-input-single-output TS fuzzy system

Decomposition of the three-input-single-output TS fuzzy system and the output values with respect to the vertices of all cuboid fuzzy meshes
Figure 11 shows that the fuzzy system output interval is
Over L1 path, TS1,1,1 output interval value is
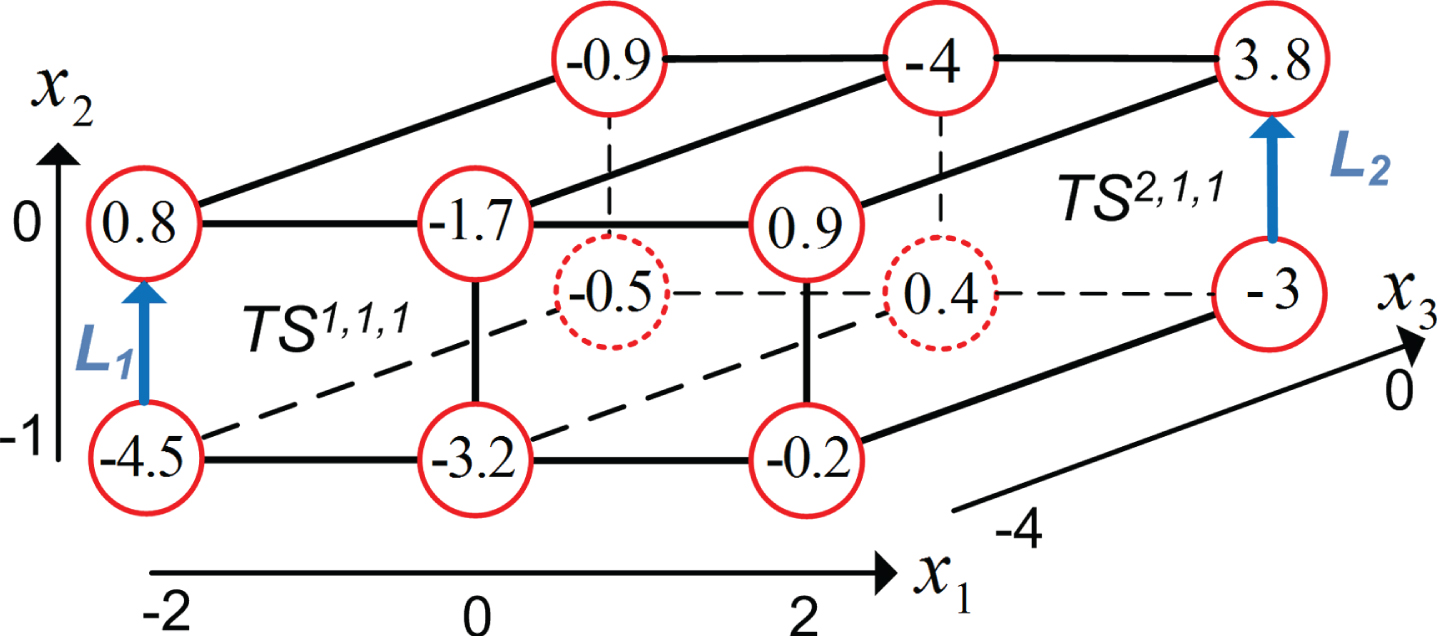
TS1,1,1 and TS2,1,1 fuzzy subsystems and the output values with respect to the vertices of the cuboid fuzzy meshes
Since, there is an overlap between the output values of y
L
1
and y
L
2
as
When TS1,1,1 fuzzy subsystem for L1 path is considered, since the inversion variable is x2, the order of the input variables is
For x1 = -2 and x3 = -4; L
x
vector, the generator vector g (x), and the inverse of the fundamental matrix
K1,1,1 matrix is obtained as follows
Then, the inverse mapping of TS1,1,1 in terms of x2 is calculated as
Considering
Therefore, for
For TS2,1,1 fuzzy subsystem on L2 path, the inversion variable is again x2. Therefore, the order of the input variables and L
x
vector do not change. By using the same procedure, the inverse solution set for L2 path is calculated as follows
Finally, by combining the obtained solution sets, the inverse mapping of the overall fuzzy system is obtained as follows
The inverse mapping of the overall TS fuzzy system is shown in Fig. 13 graphically.
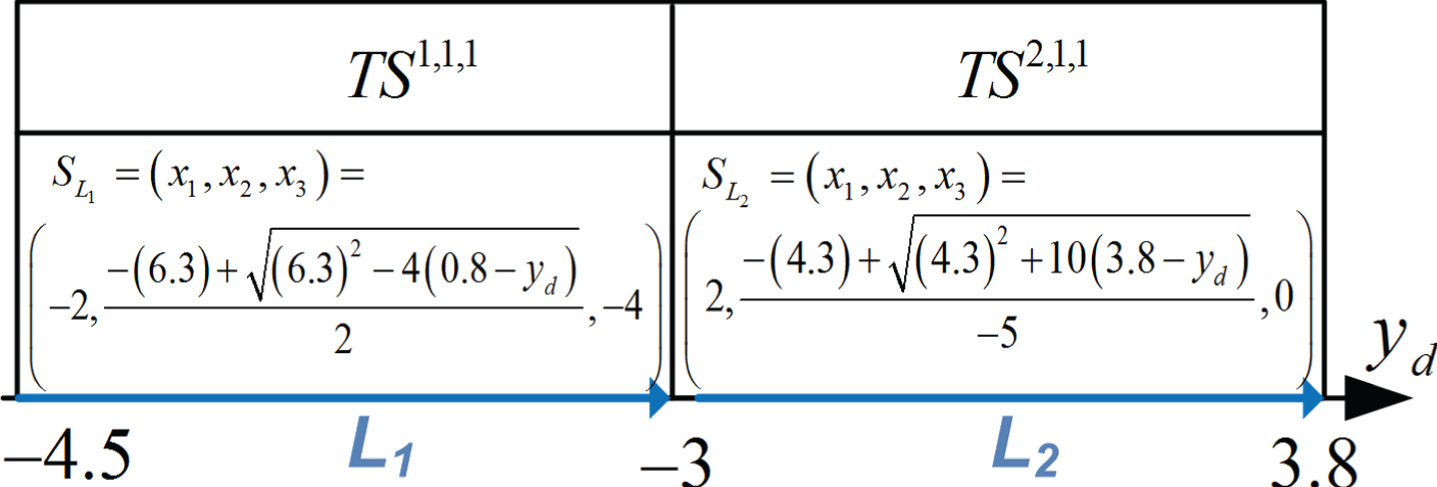
Inverse mapping of the three-input-single-output TS fuzzy system.
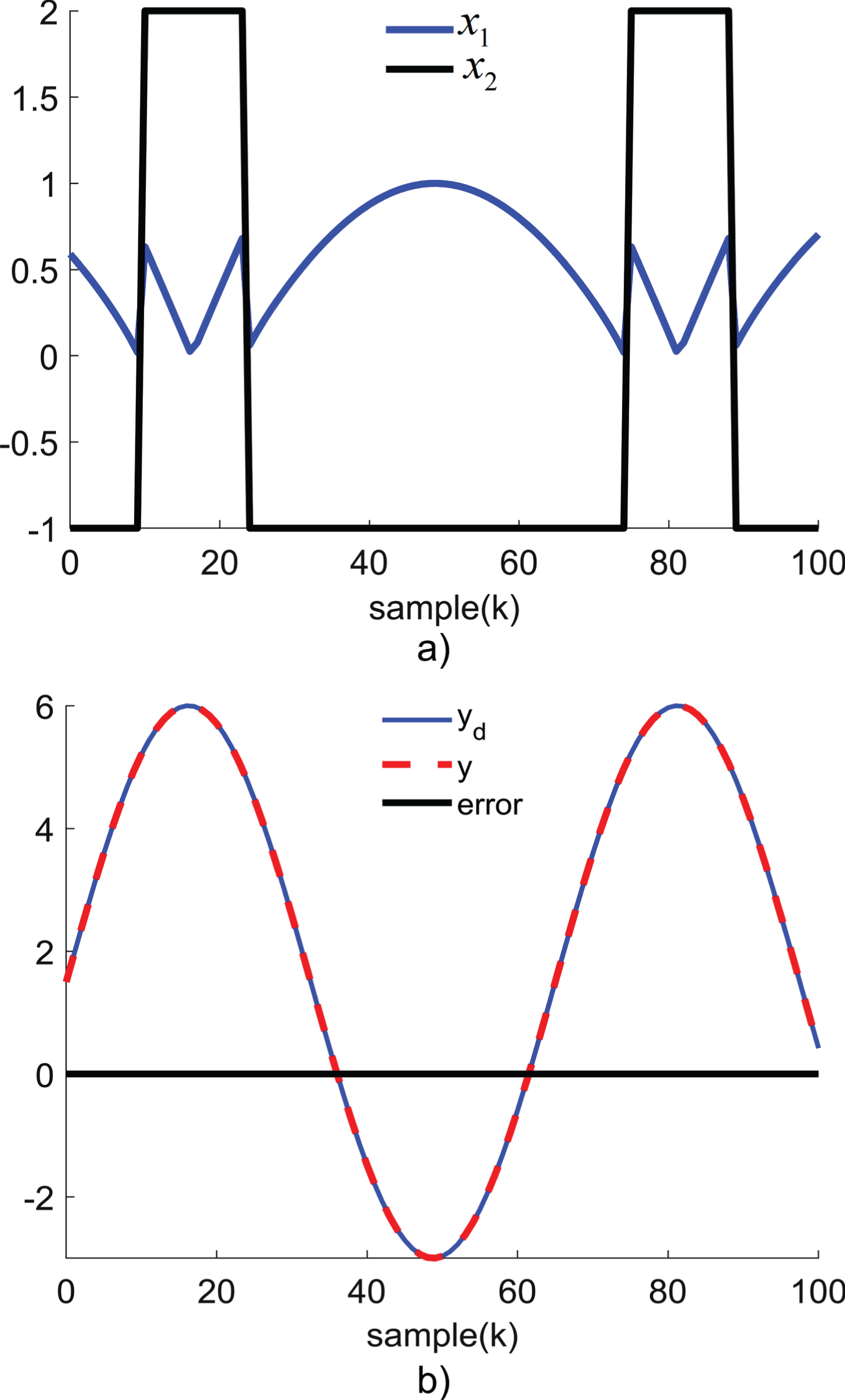
Here, let us assume that the desired output is y d (k) = 4.15 sin(2πk/ 65) - 0.35. In this case, the calculated inverse solution values x1, x2, and x3 with respect to y d are shown in Fig. 14. The comparison of the fuzzy system output and the desired output is given in Fig. 14(b). Fig. 14(b) indicates that the output of the fuzzy system tracks the desired output exactly.
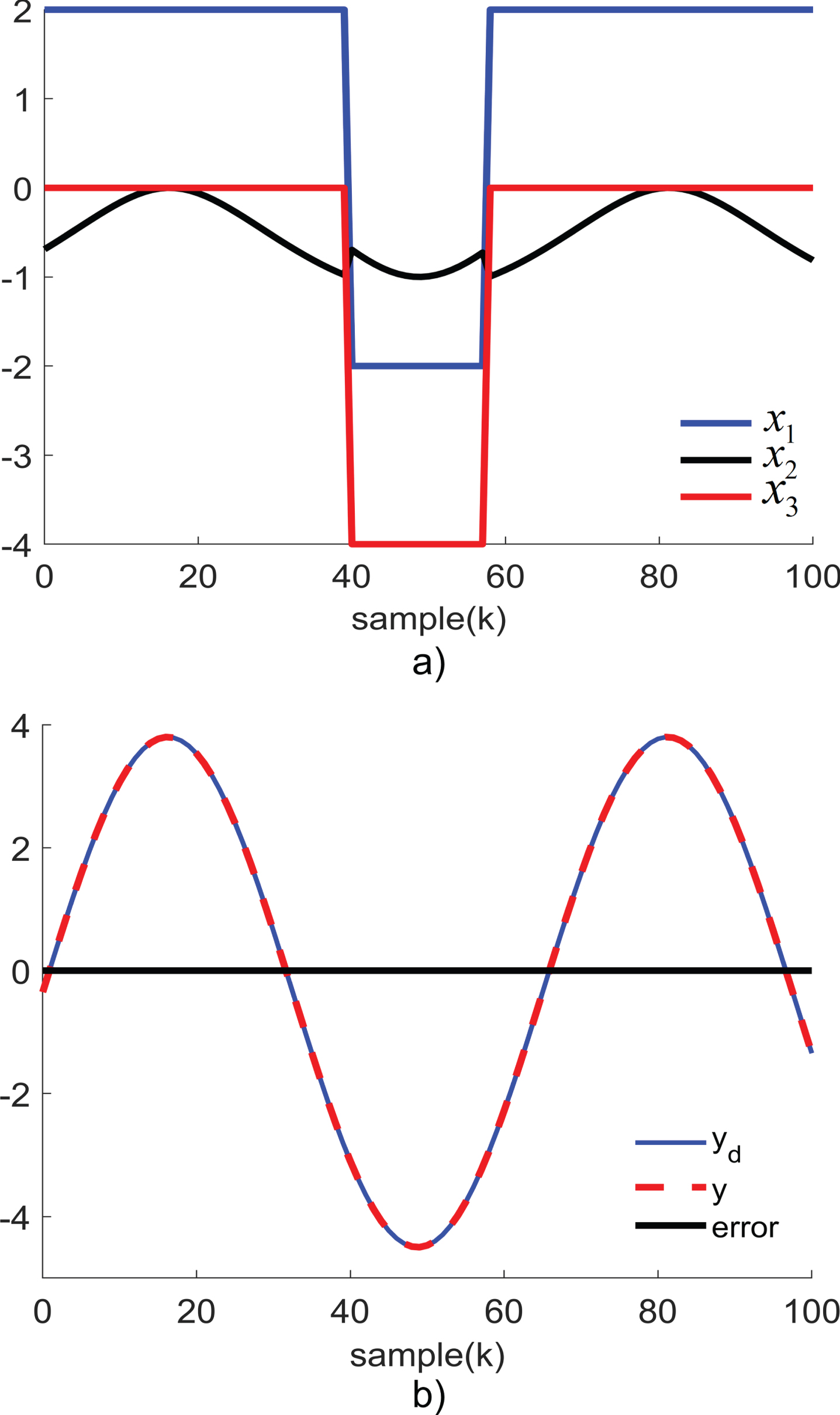
(a) Calculated x1, x2, and x3 input values (b) the comparison of the fuzzy system output and the desired output.
In this study, an exact analytical inversion method is presented for multi-input-single-output decomposable TS fuzzy systems with either singleton or linear consequents. The proposed method is based on the newly introduced inversion trajectory approach which guarantees the existence and uniqueness of the inverse solutions. The proposed method provides a simple and systematic way to obtain unique inverse solutions for all input variables simultaneously with respect to any desired system output value. The exactness and the effectiveness of the method are shown in illustrative examples.
The only limitation of the proposed method is that the TS fuzzy system to be inverted must provide the decomposability property. Apart from this limitation, the proposed method does not require any limitation on decomposable fuzzy systems such as having singleton consequents and monotonic rule bases, satisfying invertibility conditions, and providing inverse solutions for only one input variable. Therefore, the accuracy and robustness of inverse fuzzy model based applications can be improved by using the proposed method which allows the use of more flexible fuzzy systems. Additionally, the proposed inversion method is very suitable to be used in real-time applications since the obtained inverse definitions and their implementations are simple and straightforward.
In future studies, the proposed method will be extended to multi-input-multi-output decomposable fuzzy systems since these fuzzy systems can always be represented as a collection of multi-input-single-output fuzzy systems.