
Abstract
Intelligent transport system is a greatly emerging technology in recent years. The stability and reliability of these systems is very important. In vehicular ad-hoc networks (VANET), the data transmission process can be improved by employing clustering process. The nodes can be clustered in order to utilize the maximum bandwidth of the network and improving network stability. In VANETs it is to introduce road safety and driver safety. In addition, security is a major concern and the malicious nodes need to be accurately detected. Several kinds of attacks can present in the VANETs. Hence an efficient authentication method and trust aware method is essentially required. In this work, stability assured CNN based trust aware clustering and authenticated transmission is introduced. For data authentication quantum cryptography technique is employed. In clustering process, trust degree of nodes is computed, vehicle speed is observed, direction of vehicle and distance among nodes are taken. In addition, for ensuring more safety, the critical data transmission is given higher priority. Therefore in clustering, data criticality parameter is also considered. For cluster formation, convolution neural network is employed. After the clustering process, the quantum cryptography based authentication is implemented for vehicle units and road side units. Data among these units are transmitted with quantum channel encryption key. Then simulation results are observed for validating the proposed protocol.
Keywords
Introduction
With the consistent advancement of wireless communication technology and embedded system, the intelligent transportation system has turned into a hot examination field newly. Because of social and financial improvement, engine vehicles are quickly scattering. Simultaneously, the quick expansion in the count of vehicles on the road has likewise made the traffic circumstance more complex, and there will be many traffic issues, like traffic accidents and street jamming. Accordingly, analysts pertain artificial intelligence, wireless networks, and sensor technology [1] to street vehicle supervision, with the goal that vehicles can share data and deliver corresponding street data for reducing traffic problems. This is the vehicular ad hoc network, which comprises vehicle-to-vehicle (V2 V) correspondence and vehicle-to-infrastructure (V2I) correspondence. In the VANETs, the vehicle is furnished with an onboard unit (OBU), so that the vehicle can be viewed as a portable system node that can convey. With the adaptability of self-association of vehicles, V2 V structural design can effectively incorporate data distribution and information correspondence among vehicles; V2I structural design empowers the vehicle to get to the Internet, accomplishes significant distance communications, and addresses the issues of traffic and vehicular amusement, and so forth. Accordingly, through the road side unit (RSU) the vehicle acquires the related street data from the cloud server and can likewise send the important data traced without anyone else to the cloud sensing equipment [2]. The OBU and RSU are the main units in VANET. The standard units in VANETs are defined by IEEE, a Wireless Access in Vehicular Environment (WAVE) [3]. In IEEE 802.11 protocol, the medium access control is implemented using Carrier-sense multiple access with collision avoidance (CSMA/CA) [4]. RSUs are the devices that establish communications with infrastructure [5]. Typically in VANET, vehicles are connected approximately in 100–300 meters from each other. OBU in VANET contains a wireless communication unit (dedicated short range communication), memory unit and a processor unit, which provides V2 V and V2I communications [5].
The ultimate objective of VANET technology is to further develop traffic competency and increment driving experience. With the fame and advancement of VANET, it assumes a key part in client travel arranging and street security. Nonetheless, various sorts of exploration in VANETs predominantly focus on how to guarantee that vehicles acquire comparing street data. From different perspectives, vehicles can get present traffic situations through RSU. According to the obtained data, the driver can change the driving choice. As the street situations are varying, the RSU can effectively build up a correspondence appeal with the vehicle to acquire the street situation data put away by the vehicle sensing equipment.
Even though VANETs have different clear advantages, their security and protection issues are as yet the solutions to whether they can be broadly utilized or not. In VANETs, the network situation is open; invaders can catch different messages communicated in the system and can manufacture an authentic vehicle to send wrong data. The communication of wrong data will misdirect the driver to settle on some unacceptable choice, bringing related problems and even risks. Initially, before transferring the data, common verification should be done, and a related meeting key should be created for ensuring data transfer. At that point, the honesty of the message should be checked each time when a message is obtained. Also, secrecy is essential in VANET, since, supposing that the vehicle communicates its personality on the system in clear text, the invader catches the data, and the vehicle can be faked or the vehicle can be followed. In VANETs, the routing methods play significant role in saving energy consumption in the vehicles.
Clustering is a prominent strategy to shape groupings of vehicles and subsequently put together ad hoc systems and is additionally a successful technique to make the VANET global structure less active. It permits the formation of a virtual correspondence that helps the efficient dispersion of information in VANETs. The clustering technique is an effective and powerful key to the versatility issue. The construction of clustering comprises nodes that are separated into groups dependent on their likenesses [6], traffic stream [7], and other complete regulations. The synthesis of clusters incorporates cluster heads (CH), cluster passages, and individuals from clusters. These methodologies are additionally partitioned into many classes that incorporate prescient clustering [8], back-bone clustering [9], MAC-based clustering [10], conventional clustering [11], Hybrid clustering [12–14], and secure clustering [15, 16]. The analytical clustering uses structural positions and practices of a node to decide the arrangement of a cluster. In backbone clustering, an arrangement of clusters depends on interactions. The backbone conveys during the assurance of a CH. There are many methodologies introduced dependent on Medium Access Control (MAC) [10, 18]. A sub-system is separated into dynamic-based [19] and inactive based clustering [20, 21]. In dynamic-based, a clustering system consistently modernizes the directing record of a cluster. In inactive-based [22], the arrangement of the cluster is carried out inactively.
A Hybrid-based clustering approach is generally a group of more than one technique. VANET helps secure clustering applications to further develop the security and proficiency of a transportation network [23]. Safety authentication-based clustering (S-ABC) has been introduced, which verifies a node to figure out a cluster and encode interchanges utilizing an algorithm. The S-ABC methods need a safety design to keep up with the confirmation and trustworthiness of messages. Despite the feasible benefits, there are as yet various existing difficulties for clustering [24]. These difficulties incorporate successful techniques for correspondences with minimum overhead that offer versatility and defeat the deficiency of end-to-end packet transfer [25].
For example, as the portability of vehicles is somewhat high, it loads on the assistance obliged correspondences and prompts a significant expense correspondence. Because of the interesting highlights of the vehicular situation, the applied innovations just as the appropriate security model play an essential function to improve the wellbeing of the travelers. As far as a security system is concerned, as the information and occasion, messages are based on the vehicular situation, subsequently, respectability and precision of the information, and the adverse consequence of wrong information on network operation, just as reliability among vehicles are fascinating problems. Clearly presence of assaults, as security dangers [26], decreases the precision of the information leading to lower network proficiency. Different security dangers and assaults have been presented remembering actual assaults for network gadgets and correspondence assaults, for example, message fashioning, message altering, answer assaults, wormhole assaults, and protection intrusion. Hindrances, for example, structures and trucks traveling on the street, can likewise be recognized as sorts of dangers that can impact restriction administration honesty, dependability, and accessibility [27].
During the previous decade, numerous arrangements have been proposed to defeat the current security dangers in the vehicular network, [28]. Conversely, as in VANET the portability of the network vehicles is remarkably high and the quantity of network substances is very huge, Defect nodes, noxious aggressors, and hindrances are as yet enormous security challenges. Also, on account of the qualities of VANET, the network data of the vehicular situation known by every node is wrong, fragmented, and uncertain. The routing approach should overcome the mentioned issues and must incorporate security aspects of the network.
In security method introduction with VANET, it should be noted that the scheme should be lightweight security method [29]. The energy efficiency of encryption schemes is higher when lightweight cryptography scheme is employed [30]. The conventional encryption schemes provide better results when employed with devices having higher energy level. For operating with resource constrained devices like sensors, the lightweight encryption is essentially needed. In addition, the machine learning techniques were also employed to enhance the security of the network [31]. The VANETs involves the sensors, vehicles, road side units/sensors and network users accessing those devices. Therefore the malicious nodes intrusion and unauthorized user access need to be avoided.
An intelligent clustering algorithm for selecting long-lasting cluster head has been presented in [5]. This paper has taken the knowledge of traffic flow lane use, vehicle speed changes, vehicle direction, connectivity, vehicle distance and cluster size. By considering these parameters into account a long-lasting cluster head is selected to improve the stability of the network. Yet the energy consumption of all vehicles, data transmission issues and security concerns of the network are not considered in that paper. In [32], the security method for using with WSN-IoT network is presented. In [32], the dynamic cluster scheme was presented and optimal cluster heads are selected by Quality Prediction Phenomenon (QP2). For security scheme, One Time-PRESENT (OT-PRESENT) cryptography was presented to introduce security to the aggregated data. The routes for data transmission are selected using Crossover based Fitted Deep Neural Network (Co-Fit DNN). In [33], a StabTrust clustering algorithm is presented for VANETs. In this method, the trust worthy CH is selected for secure clustering. This algorithm can detect malicious and compromised nodes. In this work, the trust propagation and aggregation scheme is presented where the RSUs communicate their trust level of a particular vehicle. The trust parameters are employed to identify malicious and compromised nodes.
In this work, stability assured CNN based trust aware clustering is presented. In the clustering method, at first, the trust level of nodes is figured out and the vehicle speed is noticed. Then the route of the vehicle and distance among nodes are considered. In addition, the data criticality parameter is taken into account. The transmission of critical data is given high priority for transmitting them in the correct time. In the emergency conditions, for preventing the problems the data criticality factor is taken into account. In clustering process, data type is also included as a parameter. Cluster formation is accomplished using CNN in this work. Following clustering, the quantum cryptography authentication is applied to provide security to vehicle units and RSUs. Data transmission in VANET is accomplished with the quantum channel encryption key. The proposed quantum channel cryptography increases reliability and robustness of the system. The performance of the work is observed by simulating the network in MATLAB software.
Related works
As a technique for setting up the ad hoc system, the clustering algorithm has been extensively examined in the procedural MANET. Among them, the most familiar cluster head choosing component has the base ID algorithm [34], the most elevated node degree algorithm [35], and the weight-based WCA algorithm [36]. These algorithms completely think about the versatility and energy of nodes and primarily concentrate on the use of energy sources. Yet, source problems are not a significant element for vehicle nodes. The high portability of vehicles is the key element that causes cluster insecurity. So the clustering algorithm in MANET cannot straightforwardly be applied in VANET. Countless clustering algorithms have been presented [37] in VANET.
Wang and Lin [38] presented an inactive clustering routing algorithm called PassCAR. In the cluster arrangement stage, PassCAR involves node degree as the measure to choose the cluster head. Still, because it utilizes a single-hop system, the cluster coverage and permanence are poor. Li et al. [39] presented a clustering algorithm CCA (Criticality-based Clustering Algorithm) focused on critical metrics. CCA uses both uninvolved and critical measures to the cluster, however, it doesn’t think about inclusion and adaptability. Furthermore, the connection dependability isn’t ensured. Some MAC-based clustering algorithms have been proposed in VANET. Su and Zhang [40] presented a cluster-based multi-channel correspondence mechanism CM-MMAC.
The introduced technology comprises of three sections: cluster setup procedure, inter-cluster correspondence procedure, and inter-cluster coordination procedure. The cluster arrangement procedure is utilized to separate the vehicles in a similar direction into an equivalent cluster. The inter-cluster correspondence procedure ensures the instantaneous transmission of safety and non-security information parcels between two vehicle nodes. The inter-cluster synchronization procedure utilizes the multi-channel MAC algorithm to cause the cluster head (CH) nodes to gather or send information parcels to the cluster members (CM) nodes.
Hafeez [41], Dror et al. [42], Liu and Zhang [43], Javaid et al. [44], and Zhang et al. [45] presented a clustering algorithm dependent on fuzzy principle, he utilized fuzzy interaction to manage interface unwavering quality issue to further develop the cluster security, since speed is the primary justification for connecting insecurity. During the time spent for cluster head determination, when the ideal cluster head speed changes, the problematic node is utilized as the impermanent cluster head to enhance the soundness of the cluster. This algorithm is applied in high-velocity prospects. Even though problematic cluster head nodes are presented, successive cluster head switching prompts temperamental grouping and significant expense of cluster preservation.
Most importantly, as far as a confirmation procedure, Lamport [46] introduced interestingly secret key confirmation in a timid channel. Quickly thereafter, different two-party confirmation methods were introduced [47, 48]. However, for the VANETs situation, the correspondence between vehicles can utilize a two-party confirmation procedure, and assuming the vehicle and the cloud server are confirmed, the two-party verification will cause transmission hindrance since two-party uniqueness confirmation is normally done in one server situation. Newly, Irshad et al. [49] proposed a validation method under a multiserver design dependent on turbulent planning.
Yet, Wu et al. [50] identified that the procedure can’t ensure client secrecy and is powerless against assaults by advantaged insiders. Consequently, Wu et al. introduced a confirmation procedure for shared cloud conditions, asserting that their procedure can oppose different known assaults. In any case, Wu et al. [51] newly introduced a verification key switching procedure under a multiserver design and observed that [50] has numerous safety issues, including the failure to offer Perfect Forward Secrecy (PFS) and being powerless against favored inside assaults. Likewise, in a multiserver situation, in 2017, Truong et al. [52] introduced an ECC-based validation procedure.
Their article talked about Yeh et al’s. [53] that the procedure can’t offer shared verification and the key arrangement stage is wrong. In 2018, Zhao et al. [54] presented a protected and productive validation procedure dependent on passwords and smart cards. They asserted that the procedure of Truong et al. couldn’t accomplish the safety confirmation necessities of multiserver validation and couldn’t avoid offline password speculating and pantomime assaults. Yet, Hassan et al. [55] directed a safety examination on the method presented by Zhao et al. also observed that the method is defenseless against secrecy and discernibility problems and isn’t reasonable for a multiserver situation. On this premise, Hassan et al. introduced an improved multiserver verification method.
Chuang and Lee [56] introduced the principal confirmation system utilizing a transitive belief bond. Afterward, Zhou et al. [57] utilized Elliptic Curvature Cryptography (ECC) to introduce another shared validation method dependent on the component proposed by Chuang and Lee and referenced in their paper that the method of Chang and Lee can’t avoid inside assaults. Notwithstanding, Wu et al. [58] identified that Zhou et al’s. The method couldn’t ensure secrecy and was helpless against uniqueness speculating and imitation assaults.
Simultaneously, they planned another security assurance validation procedure utilizing ECC innovation. A few scientists have introduced the utilization of fog computing for data handling in the VANET situation. In 2019, Ma et al. [59] presented another AKE procedure without bilinear coupling. They accepted that the presented method is protected and effective. Still, Eftekhari et al. [60] identified that the procedure of Ma et al. had safety issues, for example, in-house assaults, well-known session-specific impermanent information assaults, and taken smart card assaults, and afterward, they proposed a more secure and more proficient procedure.
In 2017, Mohit et al. [61] introduced another vehicle correspondence procedure and accepted that their procedure could oppose assaults, for example, taking smartcard assaults and pantomime assaults. Nonetheless, Yu et al. [62] identified that Mohit et al’s. The procedure couldn’t offer safety characteristics like secrecy and shared confirmation, and would endure pantomime and recognizability assaults. Then, Yu et al. presented another security validation procedure and demonstrated that their procedure can oppose different well-known assaults. In 2020, Sadri and Rajabzadeh Asaar [63] demonstrated that the procedure of Yu et al. is powerless against following assaults, pantomime assaults, sensor catch assaults, etc, and introduced a safe procedure for application in VANETs.
Methodology
In VANETs, data transmission performance can be improved by employing clustering schemes. In order to provide reliable data transmission in the network, Trust aware clustering scheme is presented for VANET systems in this work. The proposed clustering method is stability assured approach which is based on convolutional neural network. Further, security protocol is introduced to provide authenticated transmission in the network. For data authentication, quantum cryptography technique is employed. The data between nodes in VANET are communicated using quantum channel encryption key. The process of clustering in VANET and data authentication schemes is explained in following sections. The diagrammatic representation of VANET system is shown in Figs. 1 and 2 represents the block diagram proposed model.
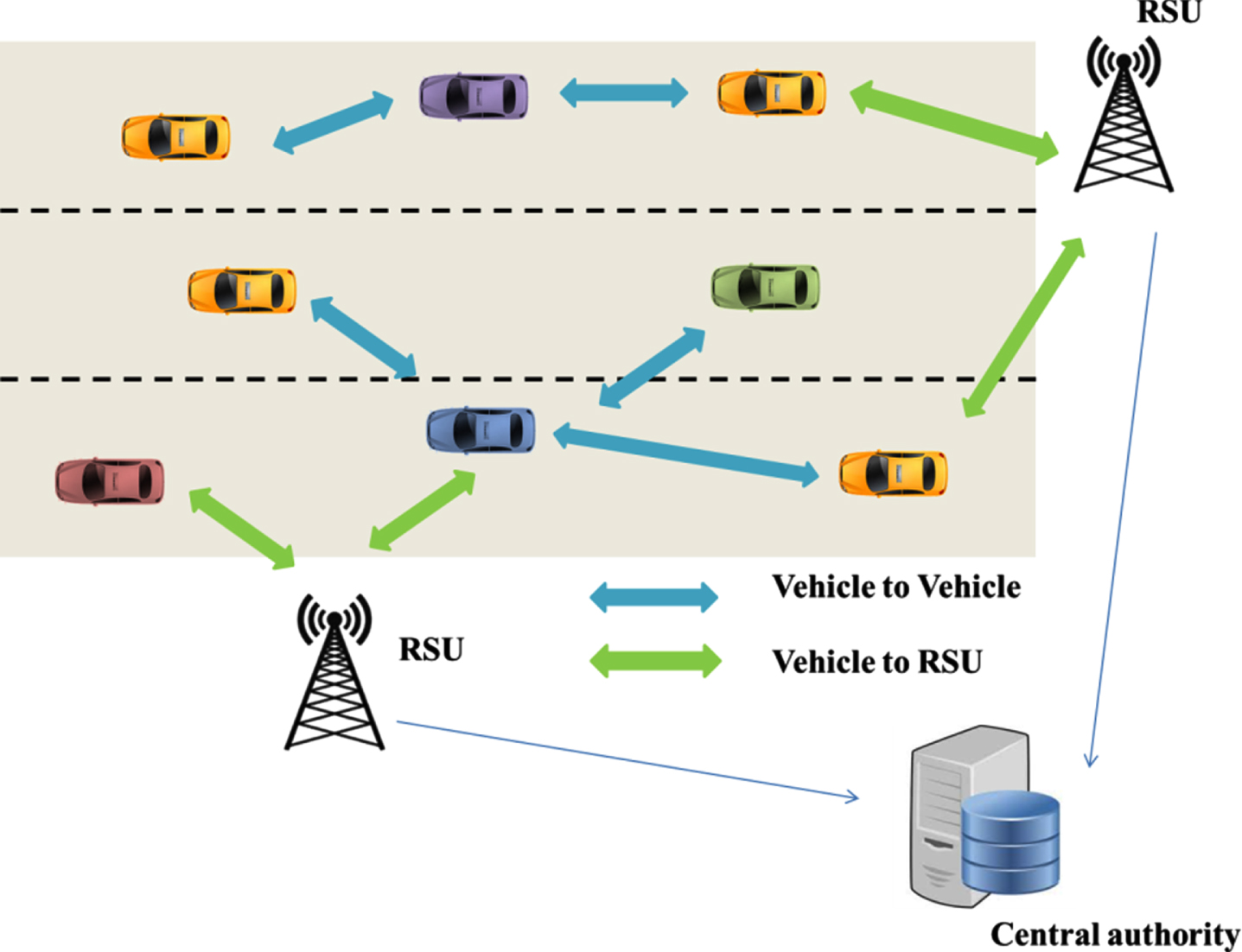
System design of VANET communication.
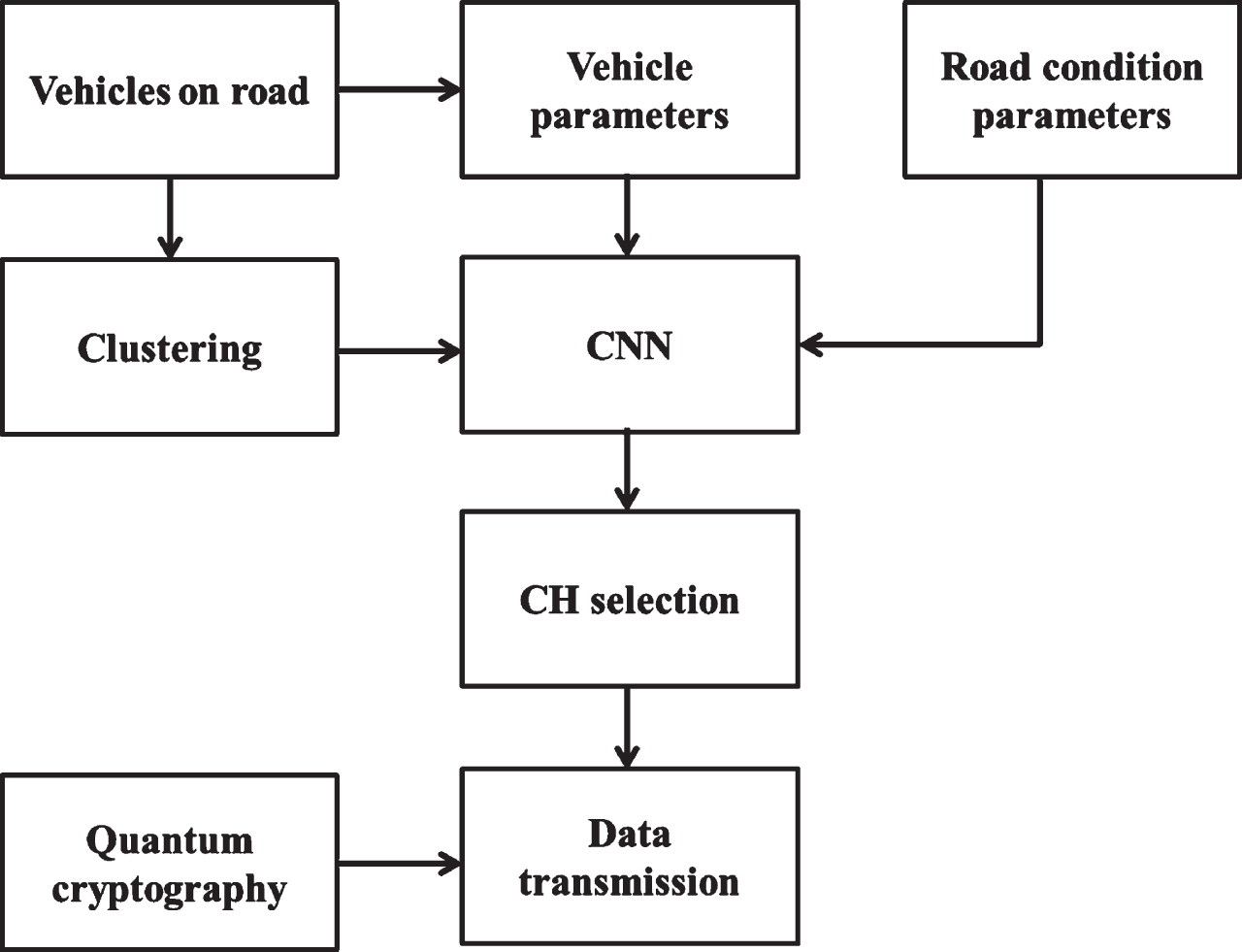
Block diagram of proposed data transmission method.
In the proposed work, it is assumed that the VANET system has many vehicles with same processing power and storage. Also the nodes are assumed as IoT enabled and they can communicate and store information. Unlike WSNs, in VANETs the theory of CH rounds per node cannot be applied, since the vehicles in VANETs do not have energy consumption issue as they are not battery powered. Instead, the selection of new CH will be performed when a CH leaves the place. When considering a road scenario with vehicles and intersections on roads, the flow of vehicles on roads gets divided at the intersection. Each intersection depend on three traffic flows; left-turn flow, right-turn flow and straight-flow movement. The selection of cluster head will be done based on the traffic flow at the lanes. The lanes with high density traffic flow are suitable for selecting CH nodes from the vehicles so that the stability of cluster and CH lifetime can be ensured. The cluster head selection process should also include the parameter of road direction. If a vehicle that is acting as CH node is travelling on the straight-flow lanes, the lifetime of CH node will be higher and the coverage of more number of nodes is possible since more vehicles travel on the straight-flow lane. The CH node selection is done by considering the parameters like vehicle speed, direction of vehicle, traffic among vehicles, node trust and data criticality.
Cluster formation in VANET makes RSU to work as central unit to coordinate and store information related to the cluster locating in the range. The cluster formation process starts on joining of a new vehicle in the road. The new vehicle sends joining request to its nearest RSU and the request message along with the vehicle details are forwarded to the CH node of RSU’s nearest cluster. The vehicle will be added to the cluster depending on the parameters like direction, position of neighboring node and connectivity level. Upon receiving details from RSU, the CH node sends invitation message to the respective new vehicle. Then the vehicle will join the cluster after accepting the invitation message. If there is no any cluster in the vicinity of RSU, RSU commands the new vehicle/node to start clustering. In the clustering process, the vehicles travelling in the same direction and in the limit of CH node will join the cluster. In the VANET system the set of vehicles V can be denoted as, V={𝓋1, 𝓋2, . . .𝓋N}and 𝓋 denotes a single vehicle in the network. A vehicle in the set before joining into a cluster is considered as a new vehicle and considered as the unknown vehicle. The unknown vehicle sends joining request to the cluster through RSU. Then RSU will identify the direction of vehicle, node degree of the vehicle with the surrounding clusters. The direction of n
th
vehicle is denoted as
CH selection parameters
The computation of parameters involved in the cluster head selection process is explained as follows. For selecting the suitable vehicle as the cluster head, the vehicle parameters and road condition parameters are taken. Then the computed parameters of each vehicle are given to the convolution neural network. CNN selects the CH node from the set of nodes in the network. The clustering parameters are given in Fig. 3.
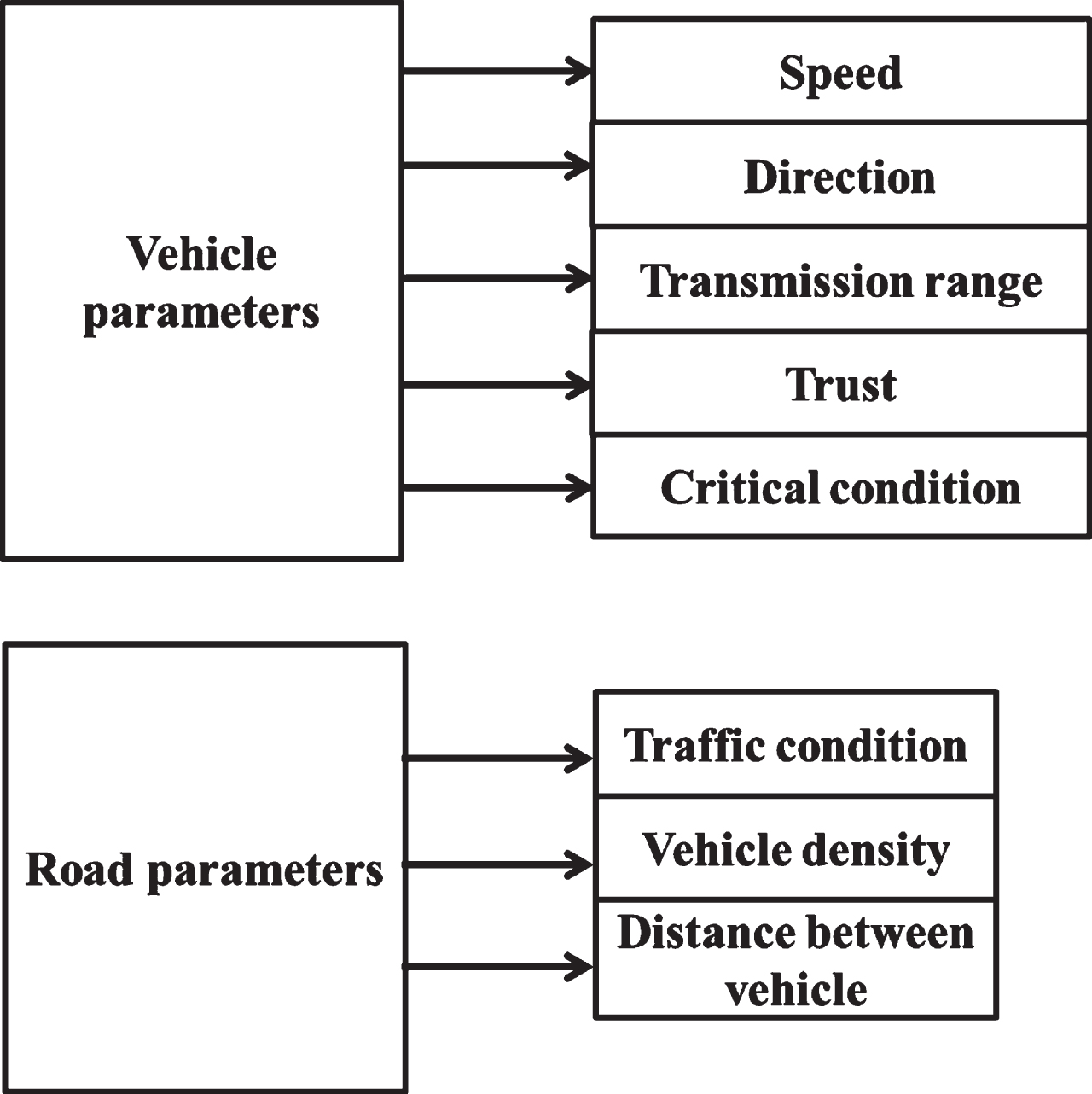
Clustering parameters.
The trust degree is the significant parameter in the selection of CH node. For a node j, a total trust degree computed using the trust degrees of existing nodes of its neighbouring nodes. NL
j
is the neighbourhood list of node j and NV
j
denotes the number of neighbours of node j.
After computing vehicle trust degree parameter, traffic parameter is computed as follows. The traffic flow in the VANET is identified from the number of adjacent vehicles surrounding a particular vehicle V. The direction of traffic flow also varies based on the direction taken by the vehicle and usually vary after the intersection. The vehicles in different traffic flows are taken in one cluster. Traffic weight (
The cluster size in VANET is usually variable and it varies according to the road conditions. The vehicle density is the main factor in fixing the size of the cluster. The vehicle density is determined from the speed of the vehicle. The density is high if the vehicle speed is low. Thus the vehicle density and speed are inversely proportional to each other. The size of the cluster is large if the vehicle density is high and vice versa. The vehicle density is computed as,
In transmitting data among vehicles and to RSU, the performance of the network is further imrpoved by preventing data overheads in the network. Therfore the transmission process is performed based on the data type. In selecting the cluster head in the network, the data type of the node is also considered. Transmission factor according to the data type are determined based on the speed of the vehicle and delay factor is intrdocued along with it.
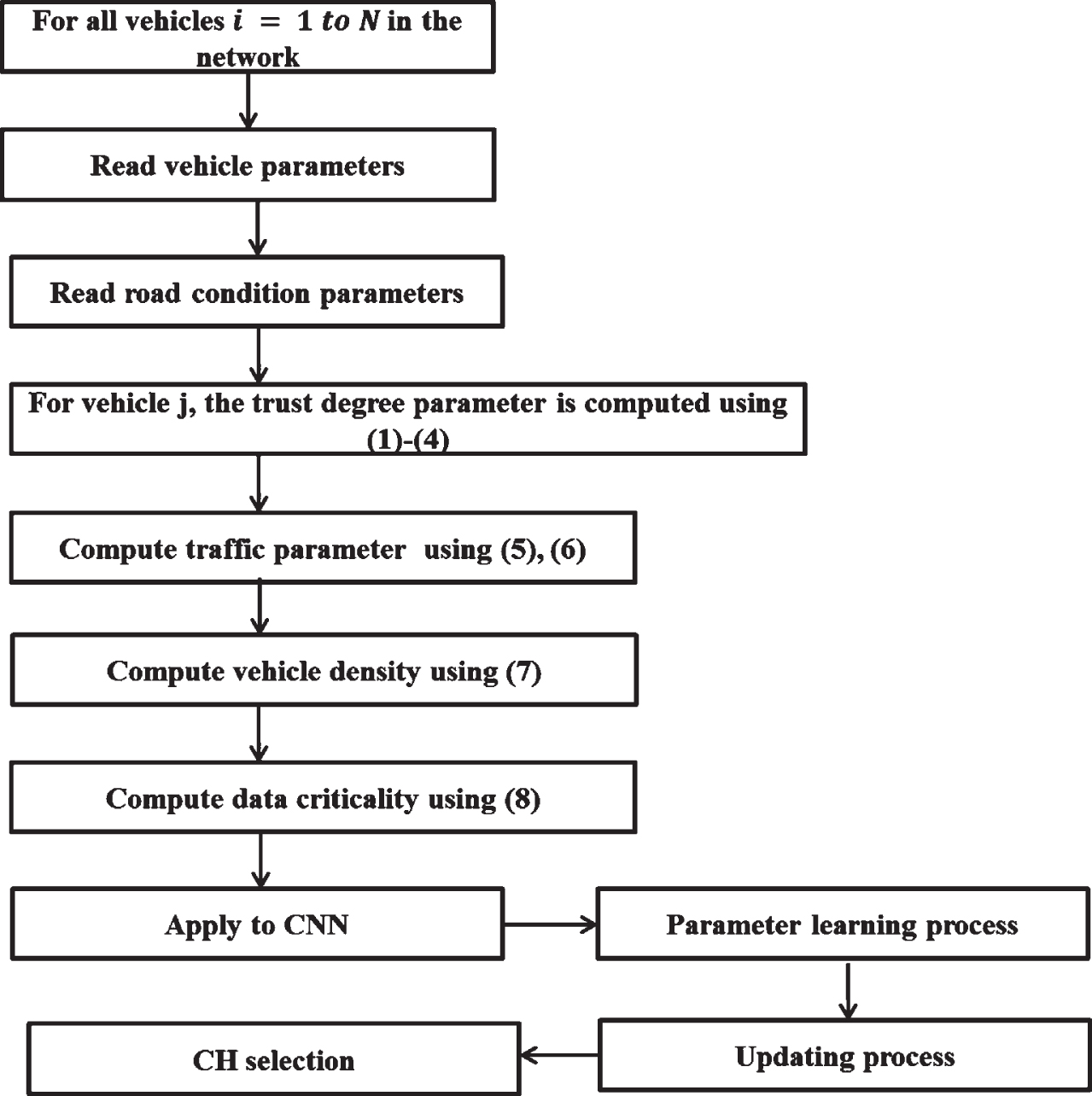
Flowchart of proposed CH selection method for VANET.
Additional metrics of a particular vehicle j are computed and denoted as, D, S and TrD j denote transmission range, vehicle direction, speed of vehicle j. Based on these parameters the cluster head is selected using CNN.
CNN is employed to select the suitable node from the given list of nodes. The selection is performed based on the parameters given along with the input node set. The general task of CNN is to develop the feature map by fixing the filter on the original data and learning how to identify the suitable CH node. For identifying the suitable cluster head vehicle, the parameters such as transmission range, vehicle direction, speed of vehicle, traffic, vehicle density, trust, data type, number of neighboring vehicles are identified for each vehicle in the VANET. At the input layer of CNN, these parameters corresponding to each node are applied. Based on the analysis, the node with optimum parameters are selected by the CNN. CNN consist of input layers, hidden layers and output layers. The hidden layer contains three types of layers; convolutional layers, pooling layers and fully connected layers. The convolution process is accomplished at the input layer and the results are applied to the following layer. The convolution layers have pooling layer that combines the outputs of neuron clusters in one layer and make them to create a single neuron in the consecutive layer. The links between neuron of one layer and the neuron of another layer can be formed using fully connected layers. CNN employs parameter sharing scheme which controls the number of parameters in convolution layers. The job of pooling layer in CNN is to reduce spatial size of representation, the network parameters and computation time. The pooling layer also considers the way to manipulate over fitting concern. The input and output for layer m is denoted I(m-1) and I(m). The input data at the input layer can be denoted as I(0) and I(m) represents the output at the final layer m. The dimension of input and output map is represented as IM(m) × IM(m) and OM(m) × OM(m) for layer m. The number of input and output map is represented as IN(m) × IN(m). In CNN, the output of layer m - 1 is given as input of layer m. Thus IN(m) = OM(m-1) and IN(m) = ON(m). The i
th
input data map of layer m is
In input layer, the initialization process is performed, where the neurons are initialized with the nodes’ parameters. The number of nodes/vehicles in VANET is set as V and set of candidate nodes at the input layer can be denoted as V ={ v1, v2, … , v V }. After the initialization process, the updating process is accomplished. In this phase, the CH selection is updated according to the nodes’ parameters received. Vehicle having highest trust parameter is taken for CH node. Then final decision considering all parameters are taken. The VANET system is frequently monitored for system parameters and road condition parameters. Accordingly the CNN is trained for selecting the optimal CH node. The nodes’ parameters are updated in a certain time period. Based on the nodes’ parameters optimal CH node for the clusters are selected for training set. At the output layer, decisioning process is done. This layer selects the optimal CH node based on the fitness. The structure of CNN for CH selection process is depicted in Fig. 5. Figure 6 depicts the processes included in CH selection using CNN.
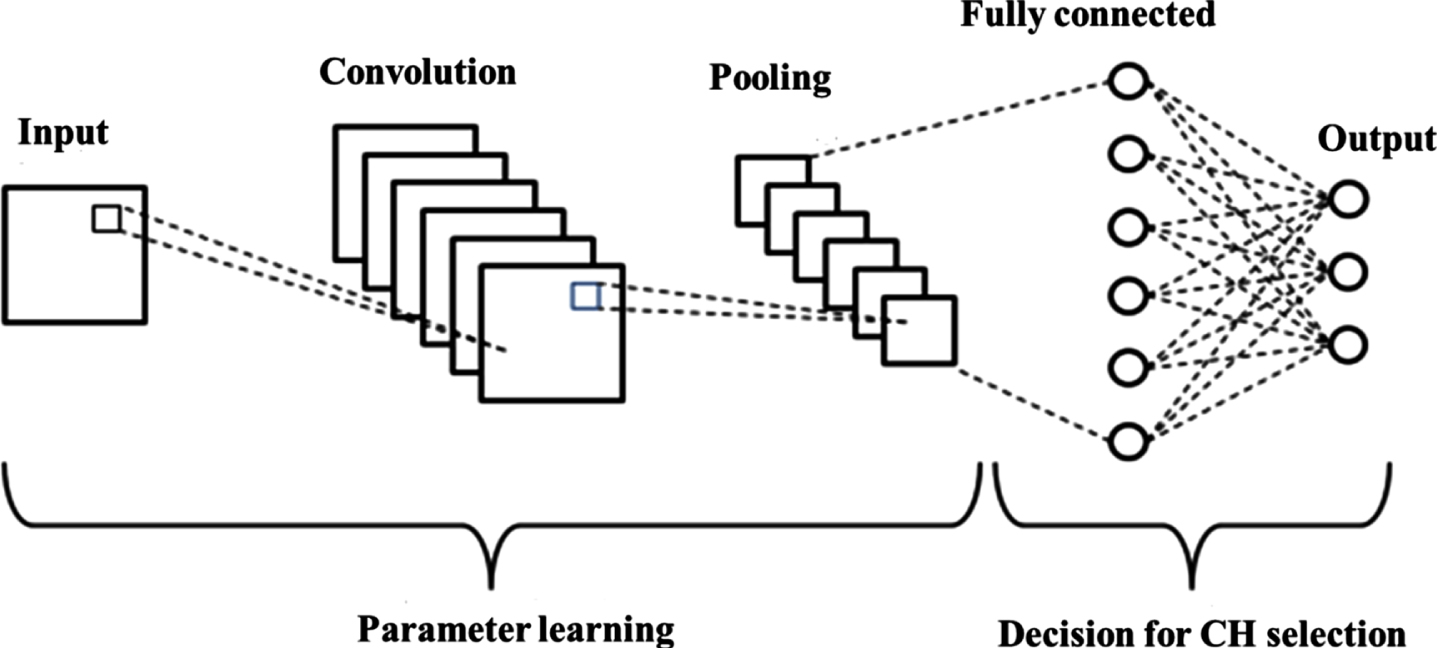
CNN block diagram.
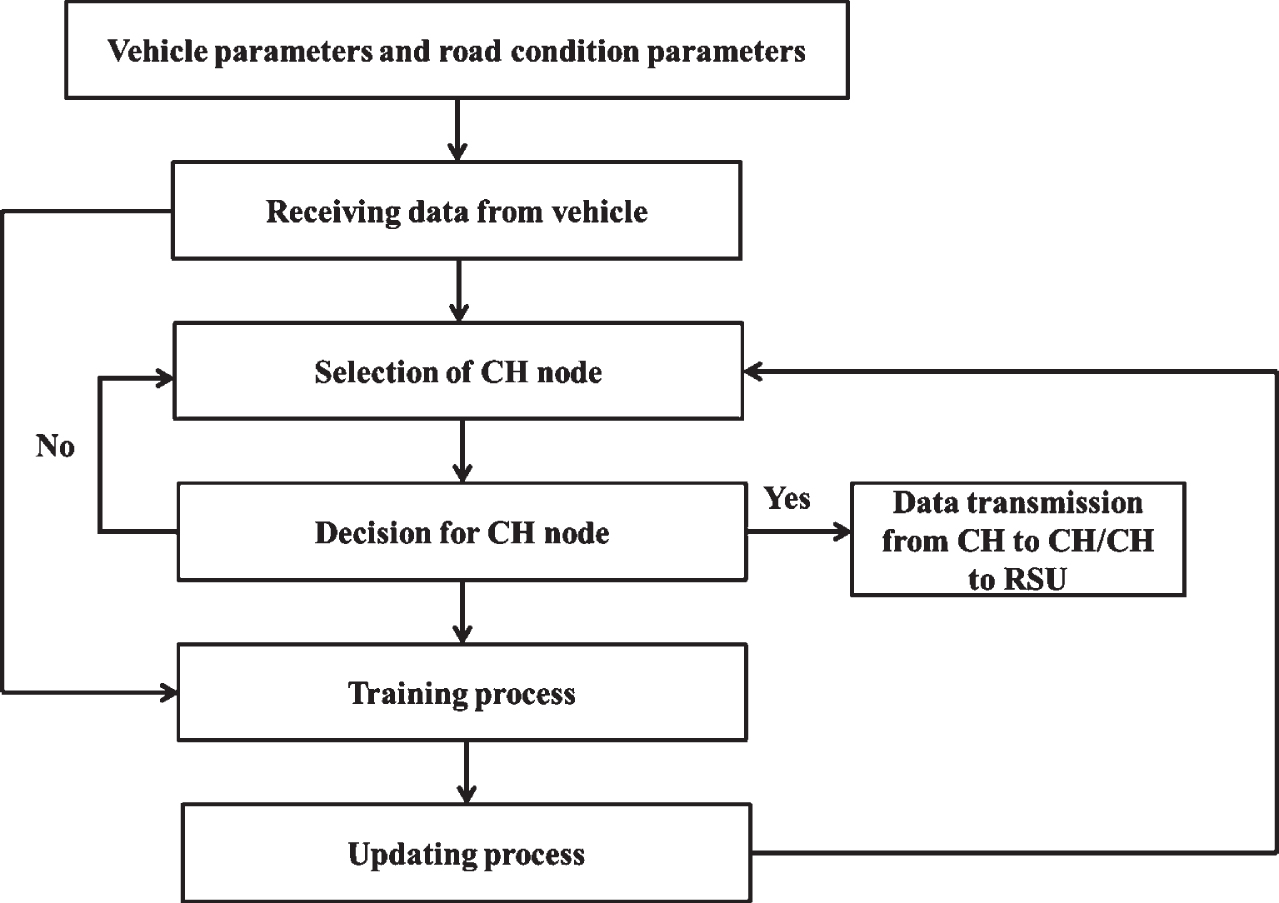
CH selection using CNN.
In VANET communication, the transmitted data has to be authenticated by adding security key. A private key is given with the data and secured. Implementation of security in VANET system involves with the generation of security keys at each vehicle of the network. At each node/vehicle two keys; public key and private key are generated. The public key is shared by a node to give access for other nodes to transmit data with it. The introduction of security in network consumes more energy. However, in VANETs energy consumption is not a limitation for vehicles. RSU in the VANET generated the security keys and sends the public key to all vehicles of the network. With the received public key each vehicle of the network encrypts its data. While receiving the data of the node the encrypted data is decrypted at the receiver side. The receiver employs the public keys to authenticate the identity of transmitting node/vehicle. Though the security is provided for the VANET system, the stability is not considered. In order to solve this issue, quantum cryptograph is employed which gives better reliability and robustness.
Quantum cryptography
In quantum cryptography technique No-Cloning theorem [64] is the basic notion for quantum communication. No-Cloning theorem states that it is not possible to duplicate the unknown quantum state with a matching copy. Accordingly, the matching copy cannot be duplicated from a random unknown quantum state. This theorem ensures the security and privacy of quantum cryptography. It can be unambiguously stated that this theorem give assurance that nobody can exactly duplicate the unknown quantum state. The observer cannot get the identity of legal users through clone technology. In quantum cryptography, No-cloning theorem ensures authentication for the proposed VANET scheme. Here the measurement operator of quantum bit is polarizer or polarized basis. Wave-particle duality theory, states that photon have properties of wave and particle at once [65]. Therefore, in the process of photon propagation, vibration and propagation are produced contemporaneously and the direction of vibration is perpendicular to the direction of photon propagation. Figure 1 shows Polarized filtrate of photon for using quantum communication. The task of polarizer is to filtrate photons passing through different vibration direction. The first polarizer allows only few photons to pass through first polarizer and those photons do not pass through second polarizer. The filtering process of photons using polarizers is performed as in Fig. 7. Consequently, the inappropriate measurement operator produces improper information collection. Thus the quantum uncertainty principle [66] exhibits some problems in quantum computing. However it is possible to obtain many new concepts in quantum key distribution field.
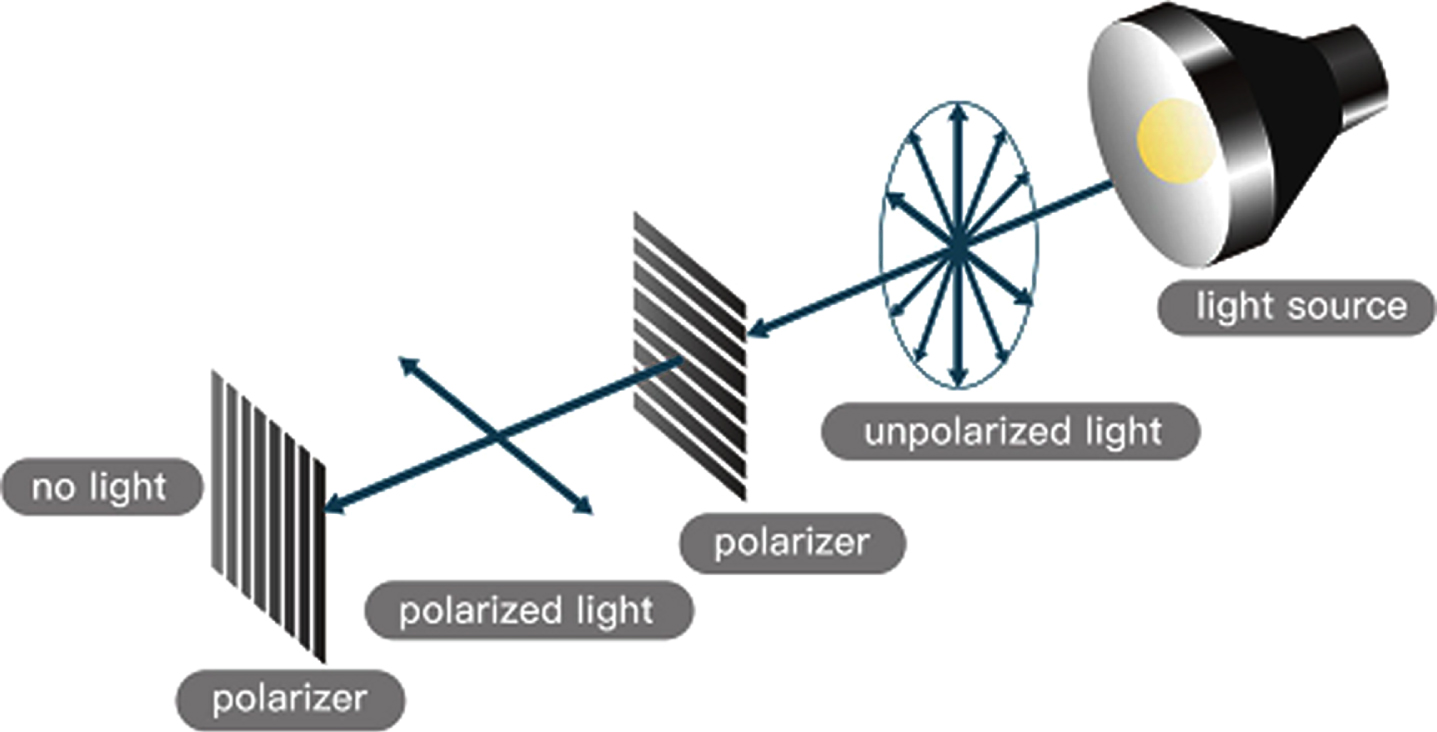
Polarized filtrate of photons for quantum communication [66].
The proposed cryptography encompasses interconversion between traditional binary bit and quantum bit. Photon Polarization theory along with interconversion rule acts as link to make connection between two states of bit. The photon polarization theory of uncertainty principle of quantum science theory is divided into two kinds, namely, decision sequence and measurement basis sequence. These two sequences perform different functions.
3.4.2.1Decision sequence
The decision sequence performs translation of binary bit series to quantum bit series. The decision sequence has two types of polarizers, linear and circular photons. There are two orthogonal states available for every polarized photon. Linearly polarized photons types are Horizontal | ↑ and vertical | → directions. Circularly polarized photons types are levorotary | ↗ and dextrorotary | ↘ directions. The notations
3.4.2.2Measurement basis sequence
The measurement basis sequence is utilized to bring back binary bit series from quantum bit series, with the use of two types of polarizers; rectilinear polarized photon and diagonal polarized photon. These photons are used to measure quantum series. These types of polarized photons are similar to linearly and circularly polarized photon. Linearly and circularly polarized photons correspond to rectilinear polarized photon and diagonal polarized photon respectively. The uncertainty principle of quantum cryptography states that the linearly (rectilinear) polarized photon and circularly (diagonal) polarized photon function in conjugate conditions. It is said that the received can attain certain result in the condition that linearly polarized photon is observed using rectilinear measurement basis. While, the situation is opposite when linearly polarized photon is observed using diagonal measurement basis. The result obtained in this situation is uncertain result. Nonorthogonality feature presents between linearly (rectilinear) polarized photon and circularly (diagonal) polarized photon. The notations
Interconversion from binary series to quantum bit series
Interconversion from binary series to quantum bit series
In VANET systems, the encrypted ID of the vehicle is combined with the vehicle identity number and biological characteristic of the user using XOR operation. The vehicle identity number is converted into binary bit series as depicted in Table 2. Then this binary bit series of vehicle identity number and biological identification are converted using NOT operation and XOR operation respectively. In this conversion, the place of same binary bit is converted into bit ‘1’ and bit ‘0’ is set for the place with different binary bits. Afterwards decision sequence and measurement basis sequence are set in random manner. These secret bits have both incorrect and correct binary bit. The correct secret keys are made as bold in the table. Then the template is formed as in Table 2 and the corresponding encrypted key is formed as [101000].
Generation of encrypted key
The proposed work is implemented and simulated using MATLAB software. The performance is compared with other conventional transmission systems. The simulation settings are shown in Table 3. MATLAB software is a high performance tool suitable for advanced numerical calculations and can be used as network simulation tool. In the simulation environment, 50 vehicles are deployed in 600 m2. The medium access protocol IEEE 802.11 is employed which has a transmission rate of 8 Mbps. The packet size used is 50 bytes.
Simulation settings
Simulation settings
The performance can be analysed by measuring, vehicles lifetime, cluster head lifetime, delay, packet delivery ratio and through put. The methods are Mothflame clustering algorithm (CA) [67], secure stable CA [68] and StabTrust methods [69]. The graph in Fig. 8 shows the lifetime variation of cluster members and CH according to the vehicle speed. It is shown in the Figure that the lifetime duration in the proposed CNN based clustering method is larger than other techniques. It is also observed from the graph that the lifetime decreases when the vehicle velocity is high. At some point, though the vehicle velocity is high the lifetime of vehicles increases due to certain road side conditions. In the proposed work, the cluster head and cluster member duration is large even though the vehicle speed is high.
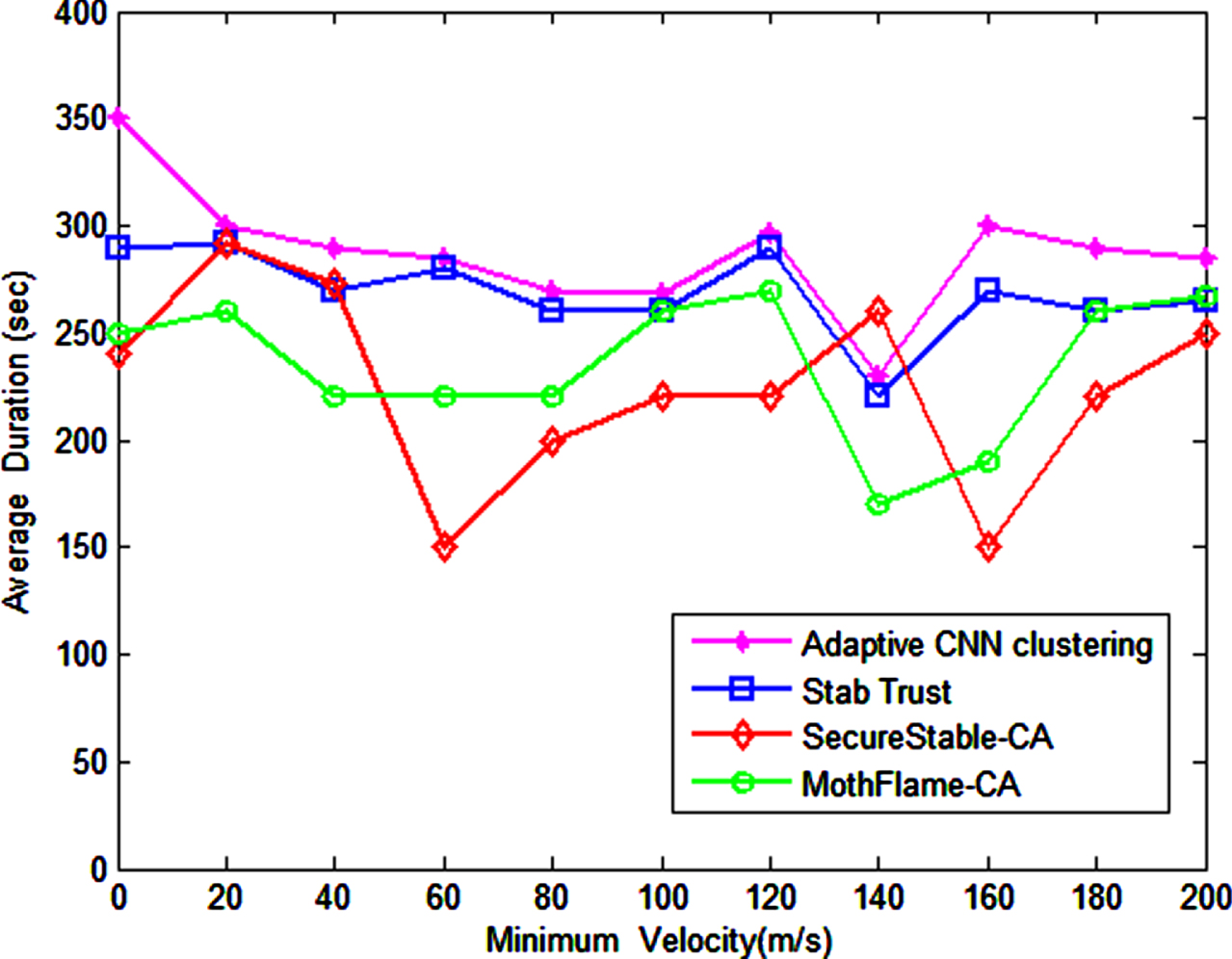
Average lifetime duration of vehicles.
Cluster head lifetime of a node is the period for that node to become as CH and to leave the cluster. The cluster head stability is evaluated by measuring the cluster head lifetime. Thus the larger time period for CH lifetime infer more stability of the network. Figure 9 shows the average lifetime of cluster heads for different number of nodes and transmission range. When many vehicles present in the system the cluster head stability is maintained very well. Therefore the lifetime increases when there are many nodes in the network. Similarly, when the nodes’ transmission range is high, the cluster head lifetime is increased. The presence of large number of vehicles in the network makes slow movement of vehicles. Thus the vehicle speed and direction are maintained as same. Therefore, no changes happen in the cluster. In case of emergency condition, the critical data transmission happens.
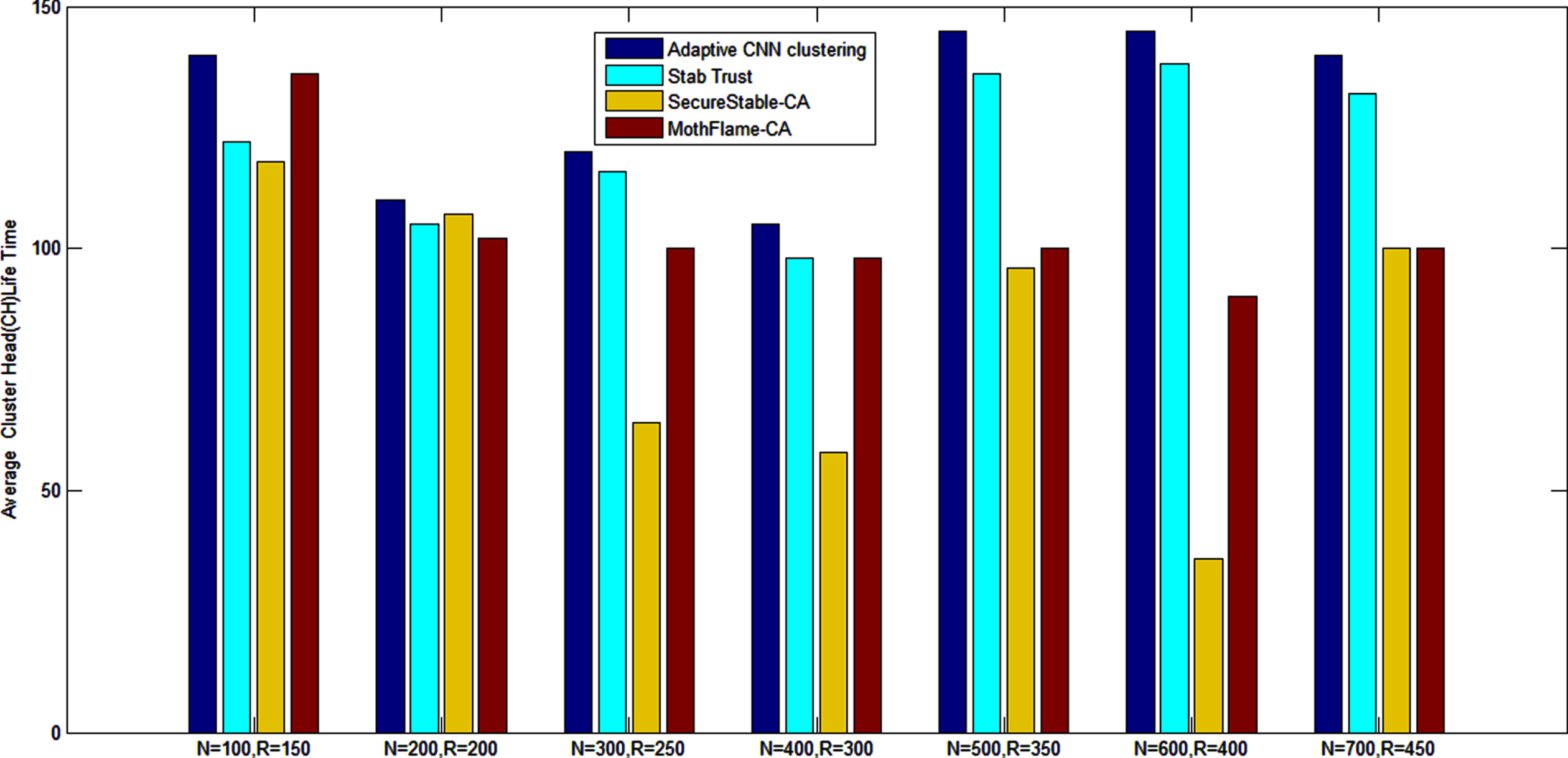
Average cluster head lifetime vs. number of nodes and transmission range.
Figure 10 shows control overhead variation. The control overhead defines the ratio of transmitted packets to the numbers of packets delivered among vehicles. It is observed from the graph that in the proposed CNN clustering algorithm the overhead is increasing in a stable manner with respect to time.
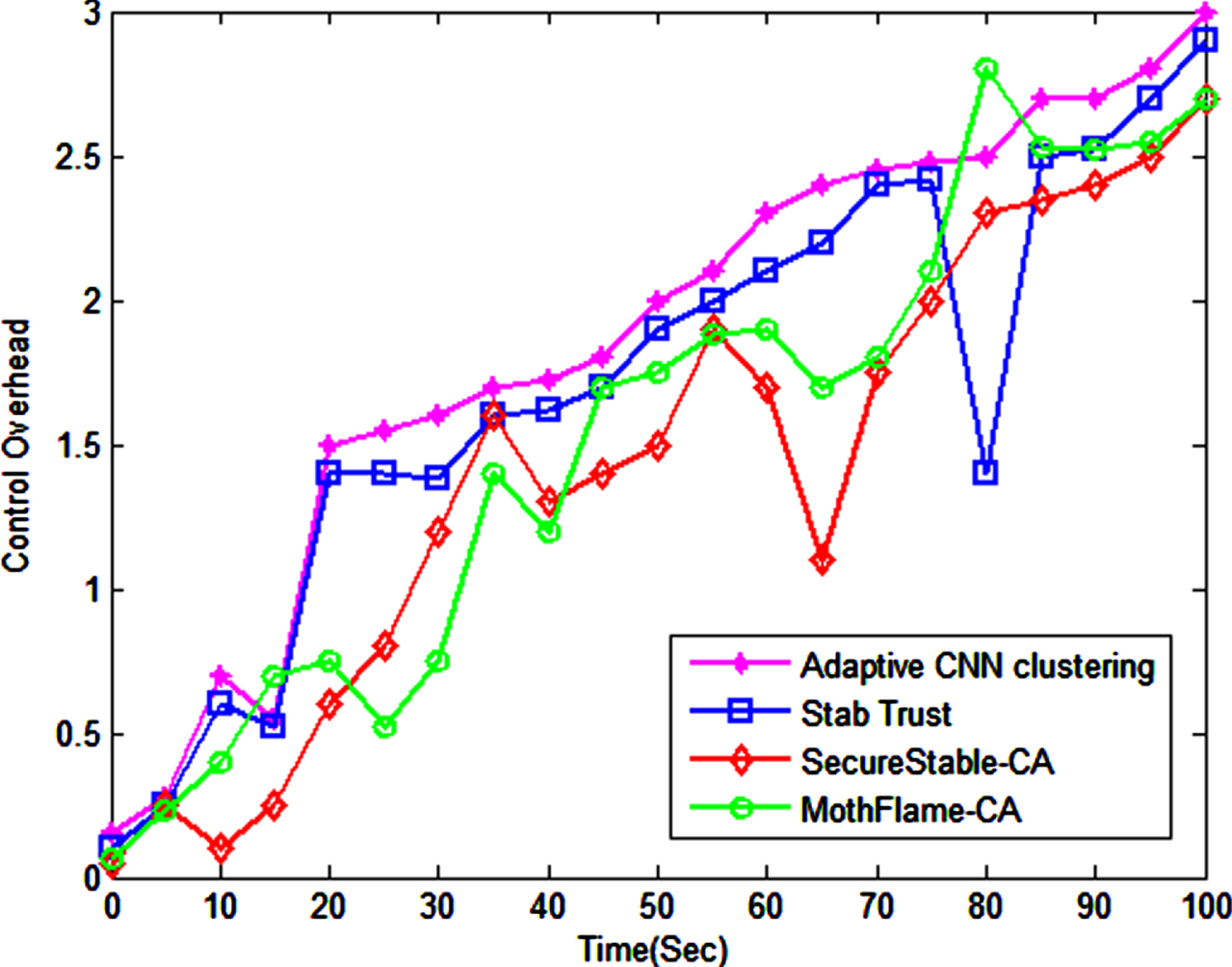
Control overhead vs time for different clustering methods.
Then energy consumption parameter is measured and compared for different methods as shown in Fig. 11. It is clearly elucidated that the energy consumption in the proposed work is less comparing with other clustering methods. The proposed clustering method performs data transmission by considering the parameters such as trust level, vehicle speed and Energy consumption for different clustering algorithms.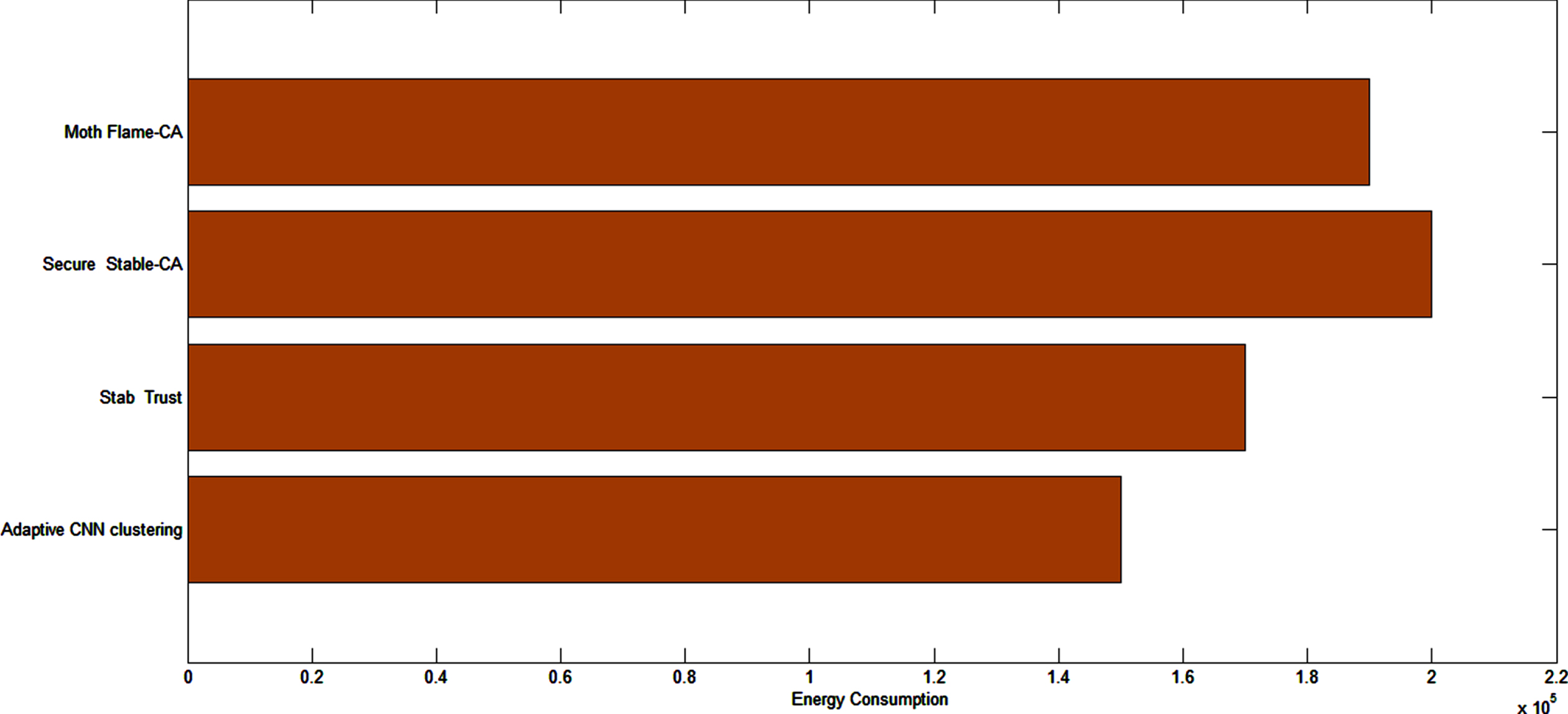
In Fig. 12, delay comparison for different routing protocols is presented. Data transmission delay in the proposed work is less comparing with other routing algorithms. The proposed clustering algorithm makes data transmission faster. When the number of nodes increases, the delay is more, due to increased network size. In Fig. 13, encryption time of proposed security protocol is analysed and it is compared with secure stable CNN and Stab Trust methods. Comparing with those methods, the encryption time is less in the proposed work.
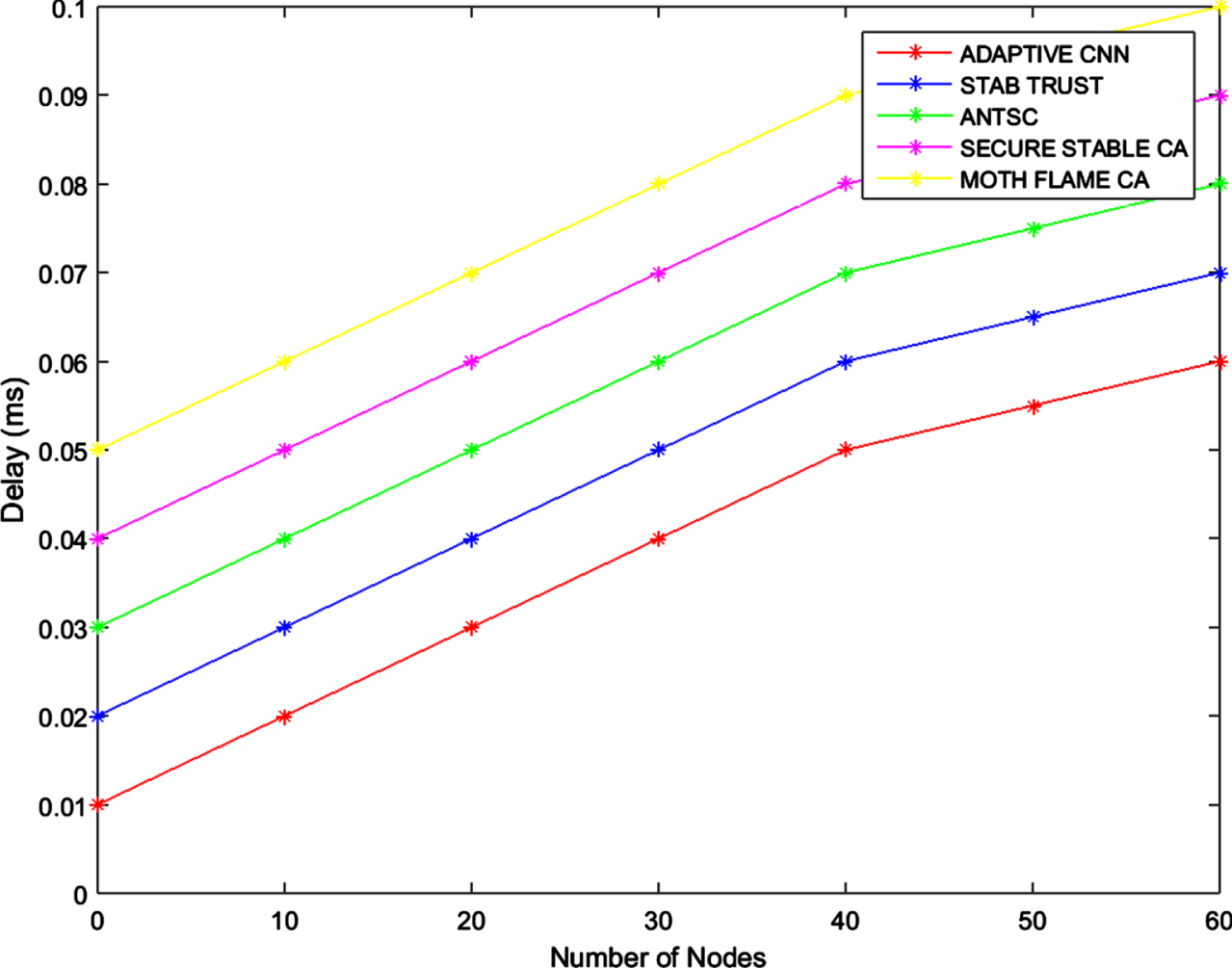
Comparison of Delay for different methods with varying number of nodes.
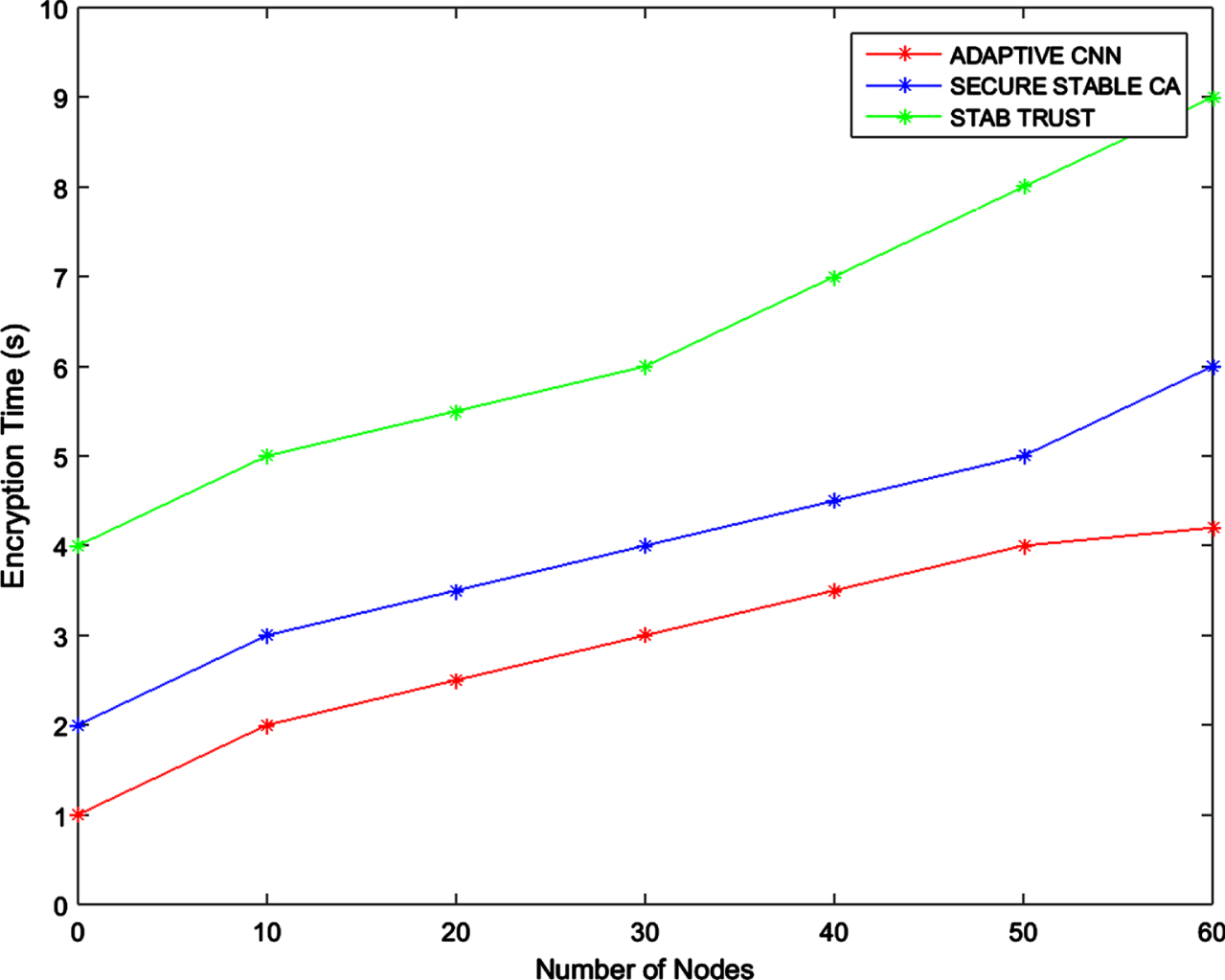
Encryption time comparison for different security methods.
In this paper, CNN based trust aware clustering algorithm is presented. The clusters of vehicles are formed to establish data transmission. The formation of clusters is done based on several parameters. The CH selection in this work is performed to have more stability for ensuring better transmission. The stability in the proposed work is increased, which is confirmed through the analysis of average lifetime of CH vehicles. Subsequently, the energy consumption of the VANET is observed and this is reduced in the proposed work comparing with other works. The encryption time analysis show that the proposed quantum cryptography consumes less time. Thus the security in the data transmission is improved. As the future extension of this work, it can be applied for the VANET system with many different types of intrusion.