
Abstract
One of the pertinent concerns in traffic management is to optimize the waiting time at the traffic light junctions. We have has already developed an integrated nonlinear model which heavily relies on the genetic algorithm (GA). Indeed, GA proves efficient in terms of the computational time given the environmental constraints and the various variables inherent to the types of users and the degree of priority allotted to each of them. However, it was revealed that some issues having to do with instability require further adjustments.
In the present article the aforementioned model is revisited with the aim of addressing the high standard deviations attributed to the objective function. More specifically, the present work considers the side effects of GA in sweeping the entire space of eligible solutions. In this respect, fuzzy Logic (FL) is integrated as a major component in order to orient the GA research. At the computational level, GA places the solution found by FL at the center of the solution space around which the initial population can be built.
The implementation of this hybrid method reduces both the waiting time at traffic lights and the standard deviation of the results, showing a significant improvement in the management system.
Introduction
Given the heavy traffic that congested cities are witnessing, traffic management has resorted to the traffic light as a major tool among others in order to optimize the traffic flow in crossroads. In fact, a number of factors affect the use and the success of such tool. For example, the integration and expansion of trams in addition to the priority it is given makes it difficult to effectively manage the traffic flow especially in the rush hours. This issue of traffic management has been addressed in the literature [10, 11] from different perspectives [14, 17] and different models [16] have been proposed [24].
1 Based on the results of [3], we can say that the fuzzy control principles are very competitive in isolated multi-phase traffic signal control.
[4] introduces an intelligent control system for traffic signal applications, called Fuzzy Intelligent Traffic Signal (FITS) control. The experiment results show that FITS exhibits superior performance than several other controllers when a few detectors are out-of-order due to its self-diagnostics feature.
In [5], a two-stage traffic signal control method is developed on the basis of the degree of urgency. The design consists of a fuzzy logic-based controller that considers the urgency of the red phase applied on four-way isolated intersection.
In [7] a new approach for fuzzy logic signal control is considered and a model which contains a fuzzy logic phase sequencer is developed.
In [8] W. Ma et al. report that it is difficult to describe a single intersection by an accurate mathematical model due to its complex features having to do with the strong nonlinearity and uncertainty.
Many researchers have actually dealt with this issue by means of systems that are based on fuzzy logic [18, 30], neural network [23] and Petrie Hybrid networks and multi-agent systems [22, 25].
W. Ma et al. [8] create a fuzzy control system with two input linguistic variables namely the number of the delay vehicles in the current phase, and the number of the delay vehicles in the subsequent phase. The output linguistic variable is the delay time of the green traffic light in the current phase.
For a mathematical model to be able to fully describe a complex phenomenon, it should be necessarily based on simplistic assumptions which suggest, for instance, varying phase durations. The variation depends on the traffic demand but it has a fixed cycle. However, Y. Dujardin [13] argues that acyclic systems are more flexible than the cyclic ones. In this respect, the model proposed in this study resorts to the acyclic method that considers the variability of factors, contributing, therefore, to minimizing the waiting time.
The successful application of a model is specific to a particular environment [29], and it is rather difficult to replicate a given model in a different environment given its inherent complex features. The complexity has to do with the infrastructure and equipment as well as whether the communication mode. The works [26, 29] and [29] are based on vehicle to vehicle communication V2V and vehicle to infrastructure communication V2I. They require the existence of such communication with all the necessary equipment. As for the proposed model in this paper, it only requires sensors installed on intersections, which provide only the traffic stream.
It is worth noting, nevertheless, that most of the proposed models have some intrinsic representational limitations. For instance, they are neither adaptable to complex intersections [11, 21], nor can they deal with multi-objective situations [12, 13]. It is this gap that; the present study, aims hopefully to fill; We have developed [1] an integrated nonlinear model. The main objective was to optimize the waiting time of vehicles taking into consideration the different types of users including cars, Heavy Goods Vehicles (HGV) and trams. The model resolved by the genetic algorithm (GA) is tested on four different environments: 1) an intersection with four lights, 2) an intersection with six lights, 3) a network composed by two cross-roads [2] and 4) a network including five crossroads [9]. and, subsequently, compared with semi-adaptive and non-adaptive systems. The results showed that system is an effective methods in reducing the waiting time, provided that its concomitant instability effect is accurately resolved.
The fuzzy logic is applied if a mathematical model fails in representing accurately a given environment.
According to the GA results obtained in [1]. We Note that there is instability represented by high standard deviations of the objective function values. This is caused by the GA characteristic that sweeps the entire eligible solutions space. However, the fuzzy logic is solely used here in the step of initializing the genetic algorithm. This process of initialization ensures a better boot to the genetic algorithm, hence better results.
The reason behind combining fuzzy logic with mathematical models prior to GA resolution is twofold: 1) to minimize the waiting time and 2) to allow fast system operations and execution. This is, in fact, meant to apply to the model of a single intersection as well as to a network of intersections. The most works done in this domain of research focus on a single crossroads [19] with light control [20]. Even the works that assume that their models can be generalized on crossroads networks, they actually decompose the management of a network into the management of each intersection per se, with the implicit assumption that the management of a network is the sum of single management of crossroads [6]. The present work, on the other hand, is meant to apply the acyclic model in a network of intersections [9], with a degree of efficiency that ensures a minimal waiting period in all intersections and takes into consideration the infrastructure mapping between all crossroads.
In this paper we recall the model of the paper [1] in the section 1. In the section hybrid we present a hybrid method using (FL) and GA; we discuss all the necessary data of the fuzzy logic that contribute to the hybridization. Then the hybridization steps are illustrated.
Section compa contrasts the results of the implementation of the hybrid method in an isolated crossroads with their counterparts in other methods. Finally, we discuss the extension of the hybrid method to a crossroads network.
Mathematical model
In accordance with the objective of this paper, the conceptualization of a system that allows a micro control of crossroads in real time requires a flexible light decision making that considers all the possible variables. in fact, the flow of vehicles standing at the traffic light may vary constantly depending on the day period, the types of users and vehicles, the location, and the degree of priority given to each user. Therefore, having considered these variables, the mathematical modelization would involve mixed decision variables.
Notations
We consider f is the index of a traffic light and Nf is the total number of traffic lights in the crossroads.
The light state is a boolean variable, it’s equal to 1 if it is green and to 0 otherwise. It is represented as follows. We denote P = {1, 2, . . . . n} the set of switching orders. The p
th
switching date of light f is presented by dp,f with p ∈ P.
The time interval [0;...; H] contains n switching dates between the moment d = 0 and the date d = H.
X =
We note R: The waiting time (2) of all vehicles during the switching of lights is the accumulation of the queue length lp,f, when it exists. lp,f: (3) represents the queue length, in number of vehicles on the light f, at dp,f. DR: the red clearance. DVmax: maximum green time. DVmin: minimum green time. DRmin: minimum red time. DRmax: maximum red time.
It is necessary to at this stage to convert the input traffic flows into processable outputs with specific features as described below.
Mathematical model
Fuzzy logic (FL)
Fuzzy logic provides its result as a phase duration based on input data, rule base and the membership functions.
Input data and output data
The queue length that may be: long, medium or small see Fig. 2.
The light may be red or green.
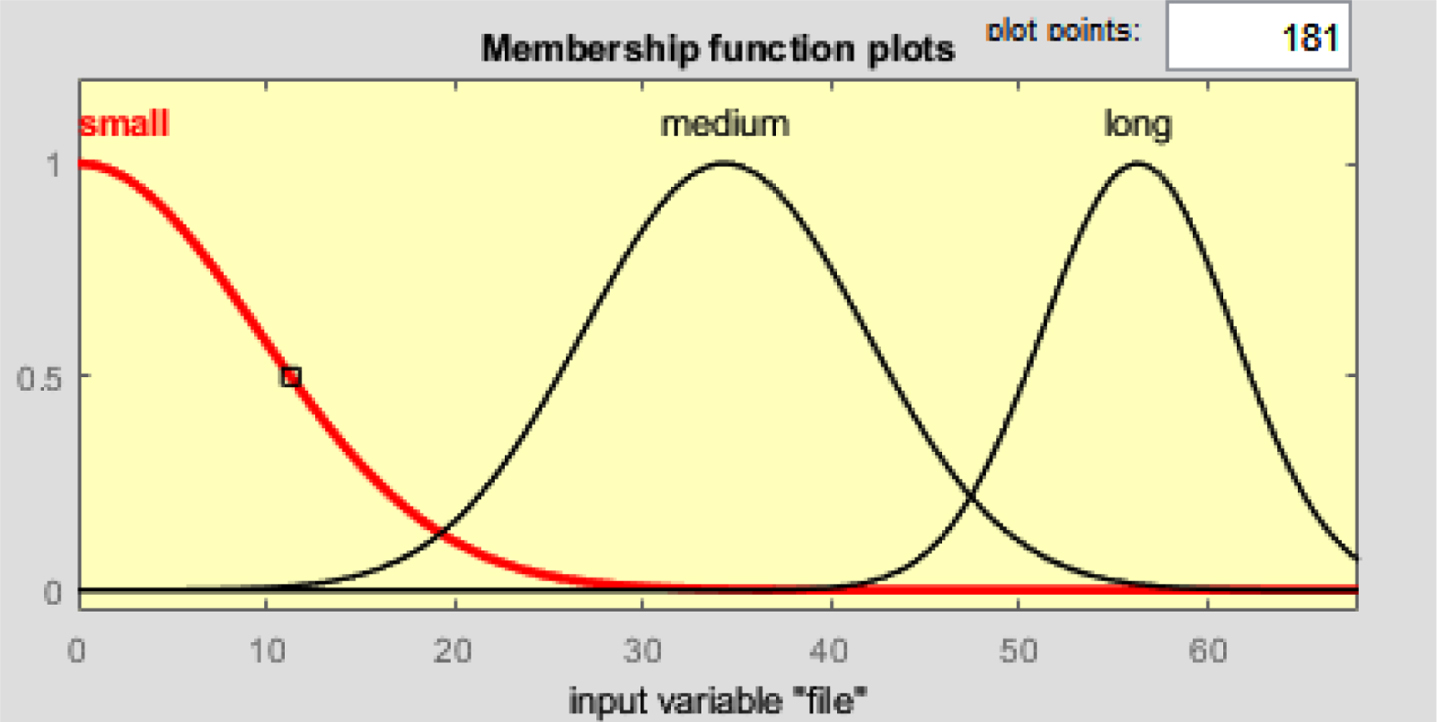
The phase duration takes the values: long, medium and small see Fig. 1.
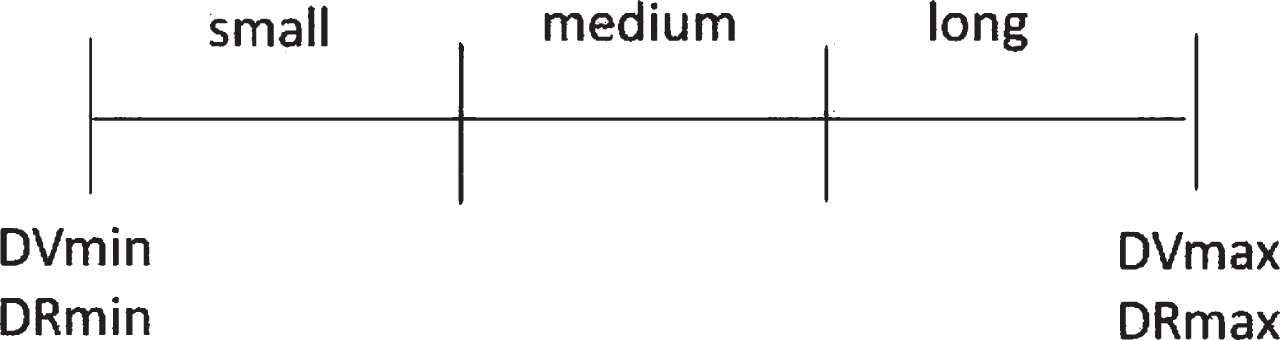
The duration universe.

The queue length universe.
Data and their values
If the queue length is small and the light state is green then the duration is small.
If the queue length is small and the light state is red then the duration is long.
If the queue length is medium and the light state is green then the duration is medium.
If the queue length is medium and the light state is red then the duration is medium
If the queue length is long and the state of the light is green then the duration is long.
If the queue length is long and the light is red then the duration is small.
The membership functions
Among the various types of fuzzy membership functions that were subject to test in the present paper, the Gaussian membership function gaussmf function shows promising results
The light state has two values 0 and 1 in all traffic situations see Fig. 3
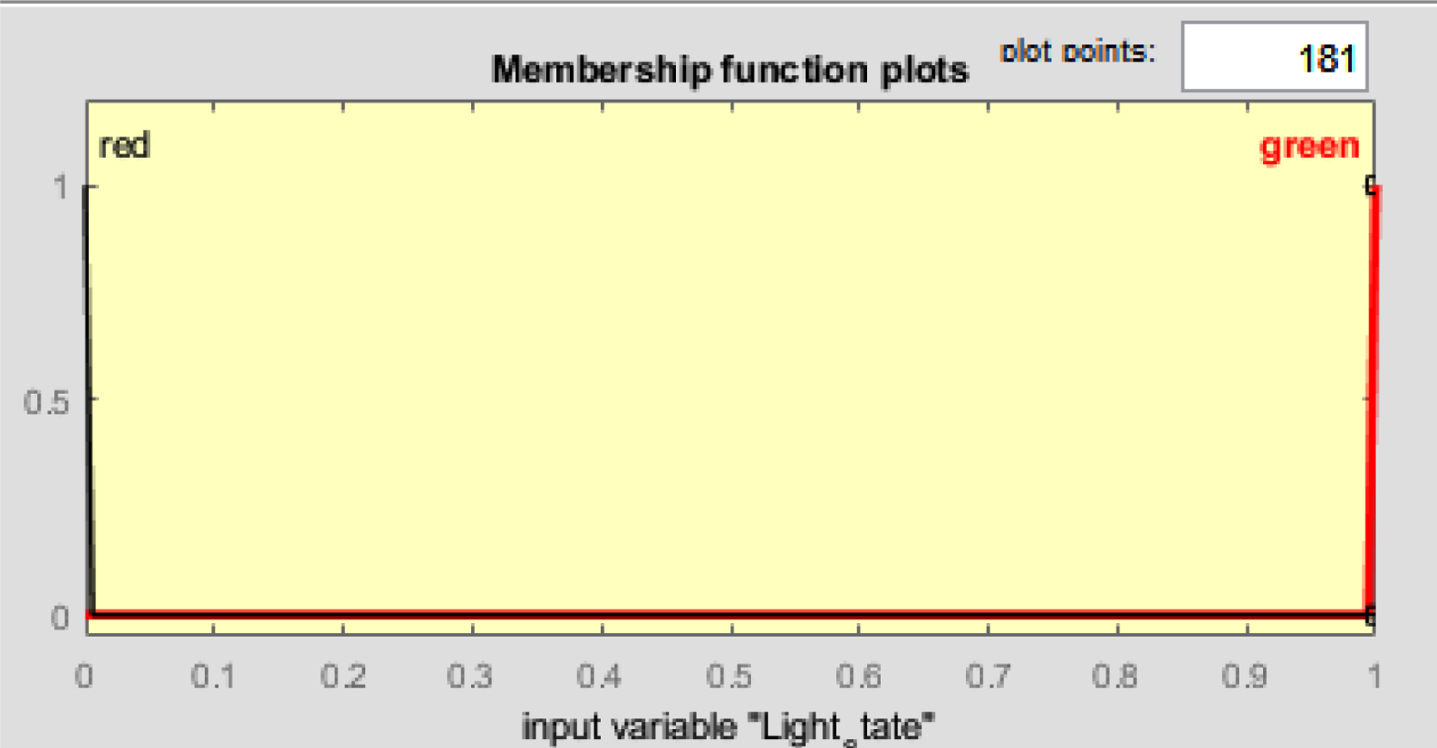
The membership function of the light state.
The membership functions of the the phase duration are shown in Fig. 4
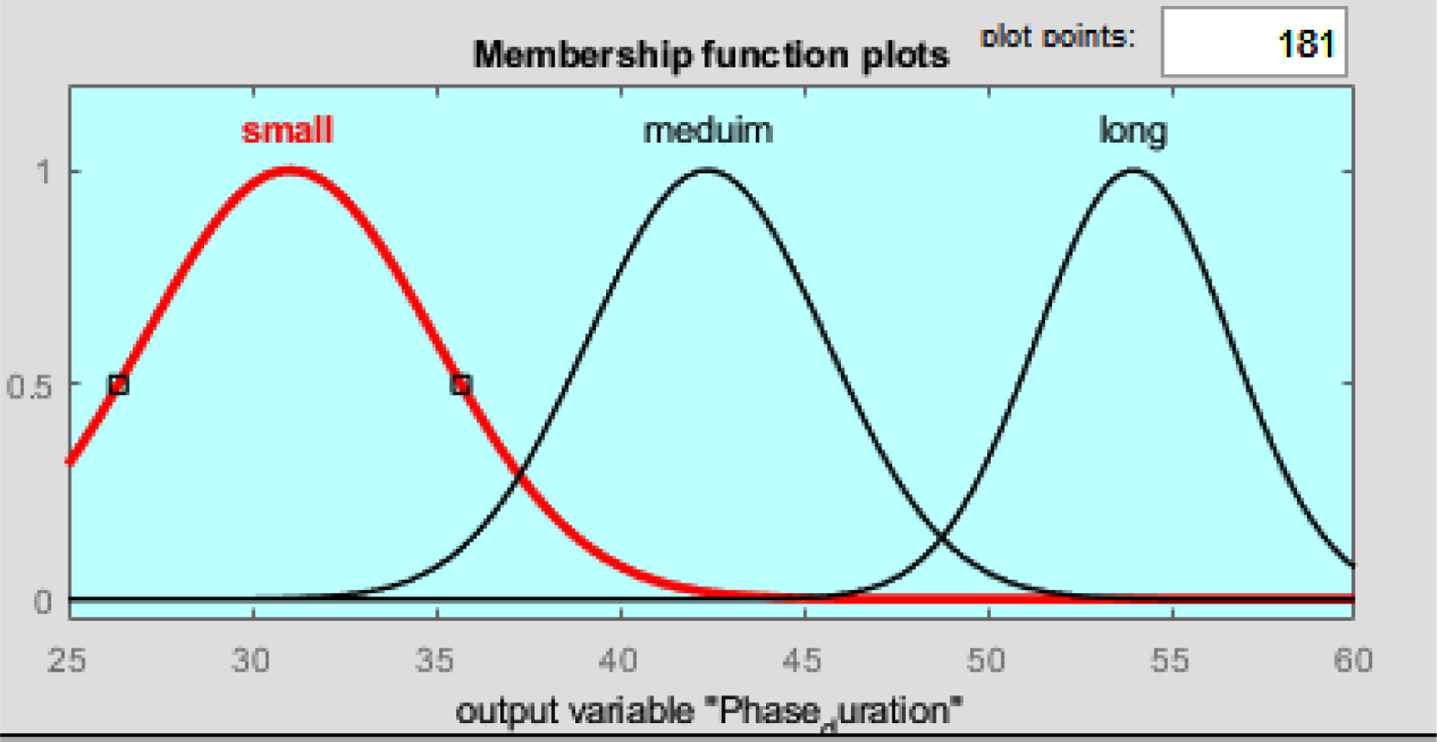
The membership function of the duration.
When we have a low flow. The membership functions of the queue are shown in Fig. 5
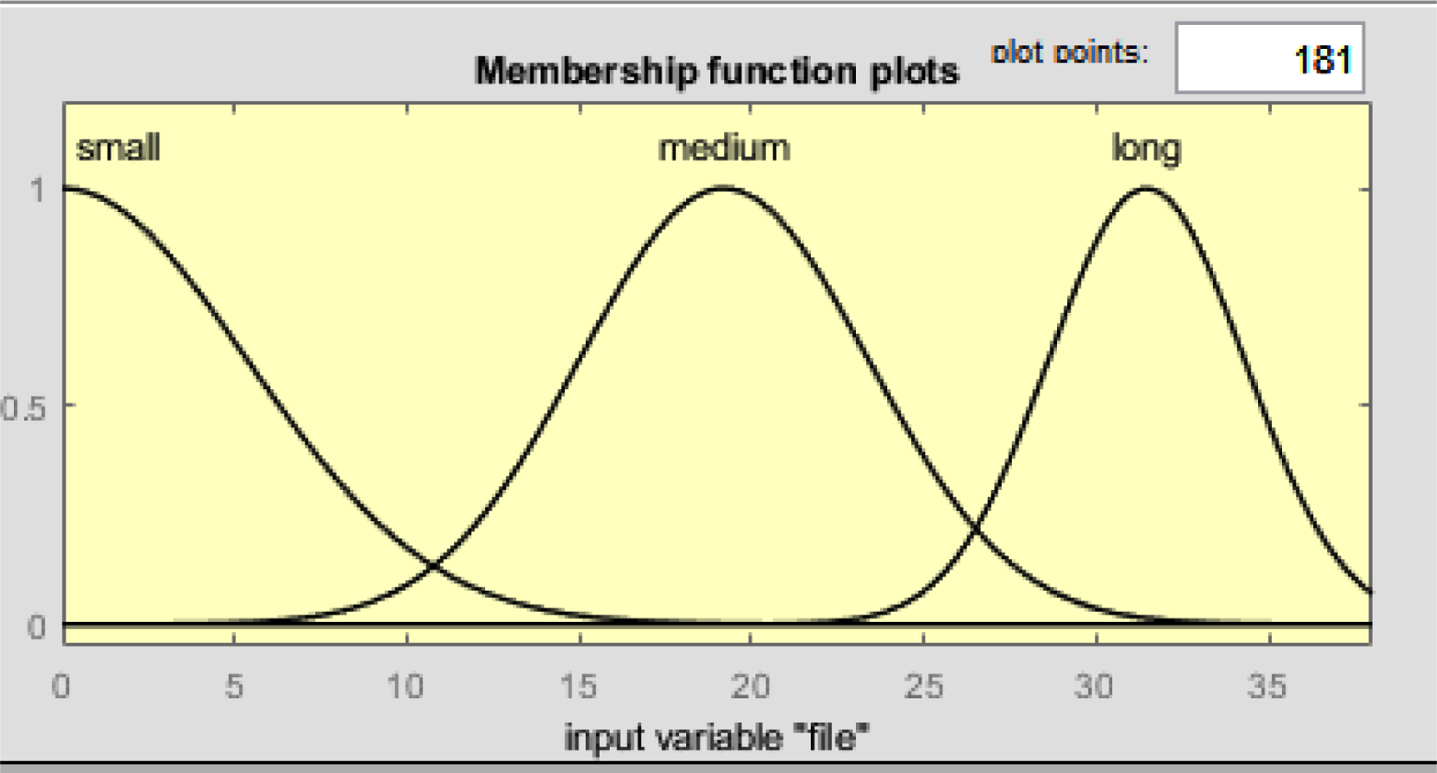
The membership function of the queue length (low flow).
For a medium flow, the membership functions are shown in Fig. 6

The membership function of the queue length (medium flow).
Finally, in the case of a dense flow there will be the following membership functions (see Fig.7).
The membership function of the queue length (dense flow).
Normally the GA builds its initial population with propositions on the whole interval [DRmin, DRmax] (for a red light switching) or on the interval [DVmin, DVmax] (for a green light switching). So either the main search interval is I = [DRmin, DRmax] or [DVmin, DVmax]. Since the interval has been divided into three parts (small, medium and long) each of them has a diameter of 1/3 multiplied by I. It is proposed that the GA takes the solution provided by (FL) and considers it as the center of a new search interval. The latter has a radius of (1/6) multiplied by I. The constants and the values provided by the sensors are represented in Table 2.
The constants and the values provided by the sensors of the crossroads with four lights
The constants and the values provided by the sensors of the crossroads with four lights
Figure 8 illustrates the general representation of the hybridization process of the fuzzy logic and the genetic algorithms.
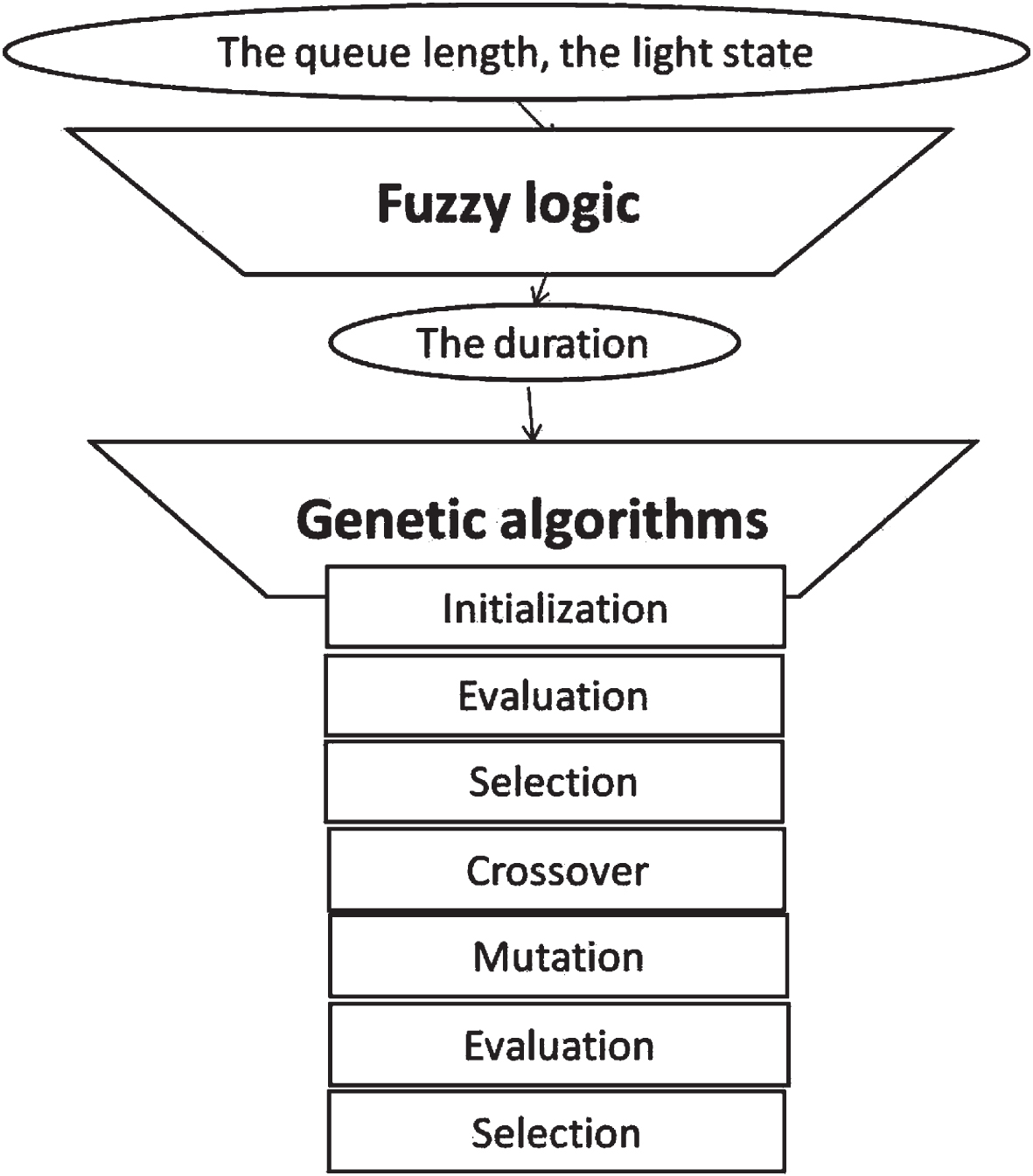
The proposed hybrid method.
The average values of waiting times with respect to road traffic variations in an isolated crossroads
The average values of waiting times with respect to road traffic variations in an isolated crossroads
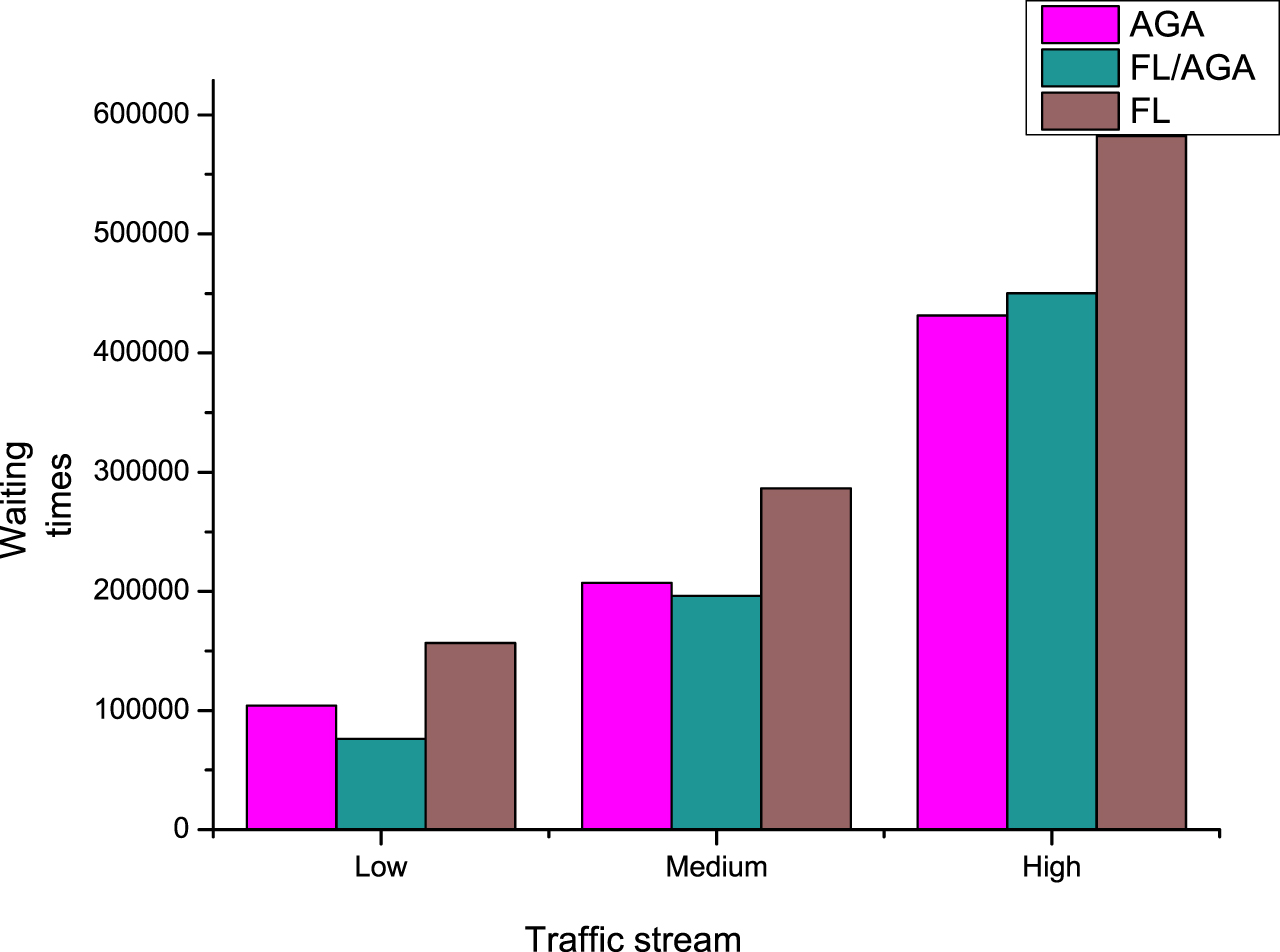
The Table 2 shows a comparison of the average values of (FA). These values generated by our system (AGA), the fuzzy logic (FL) and the hybrid method (FLslashAGA). The experience is done at the three-level flow density. A low traffic stream: the input traffic stream: DA
f
= [0.1 0.1 0.1 0.1] and the output traffic stream: DS
f
= [0.1 0.1 0.1 0.1]. A medium traffic stream: the input traffic stream: DA
f
= [0.2 0.2 0.2 0.2] and the output traffic stream DS
f
= [0.2 0.2 0.2 0.2]. A high traffic stream: the input traffic stream: DA
f
=[0.3 0.3 0.3 0.3] and the output traffic stream DS
f
= [0.3 0.3 0.3 0.3].
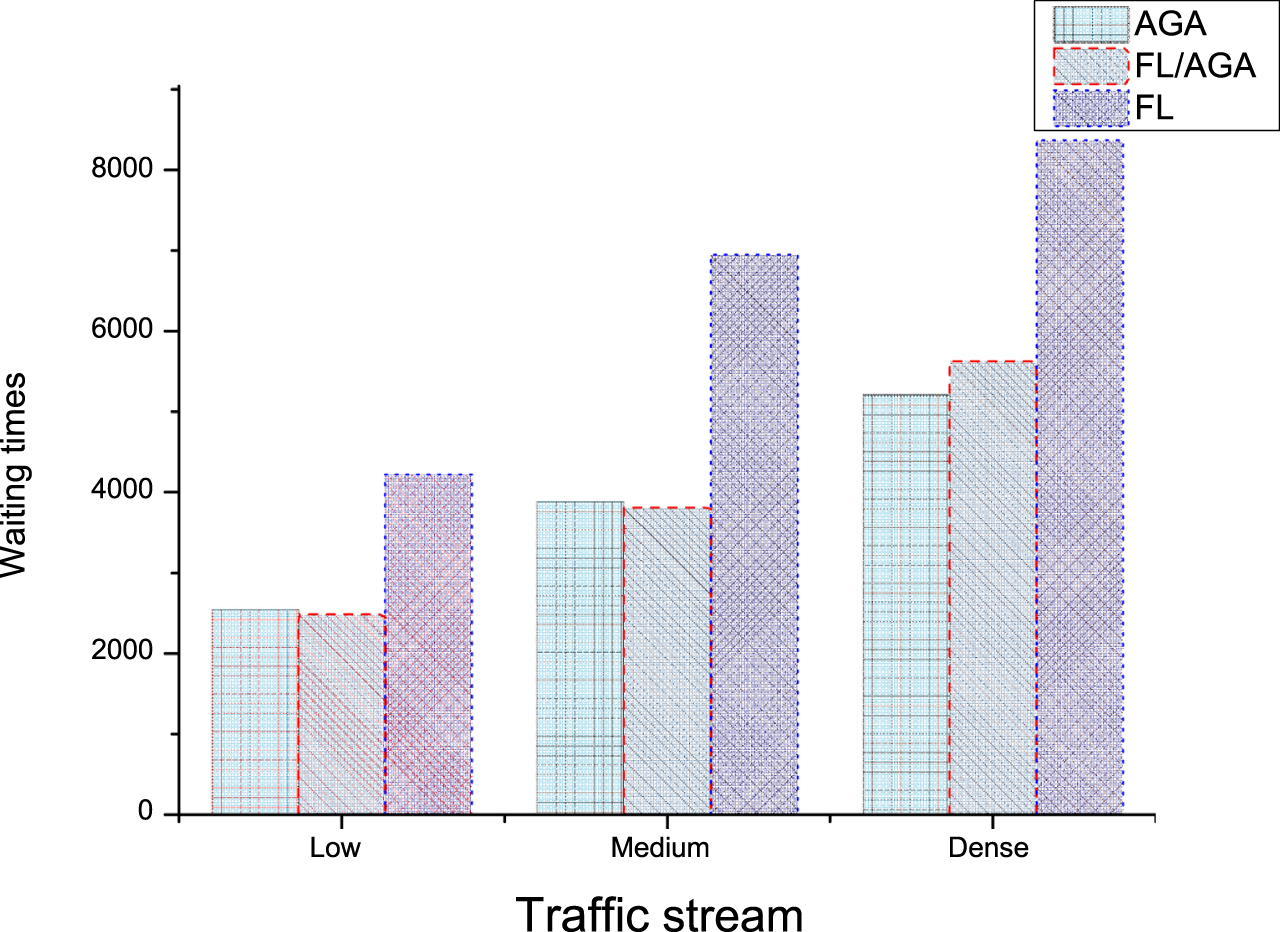
Waiting times in a crossroads.
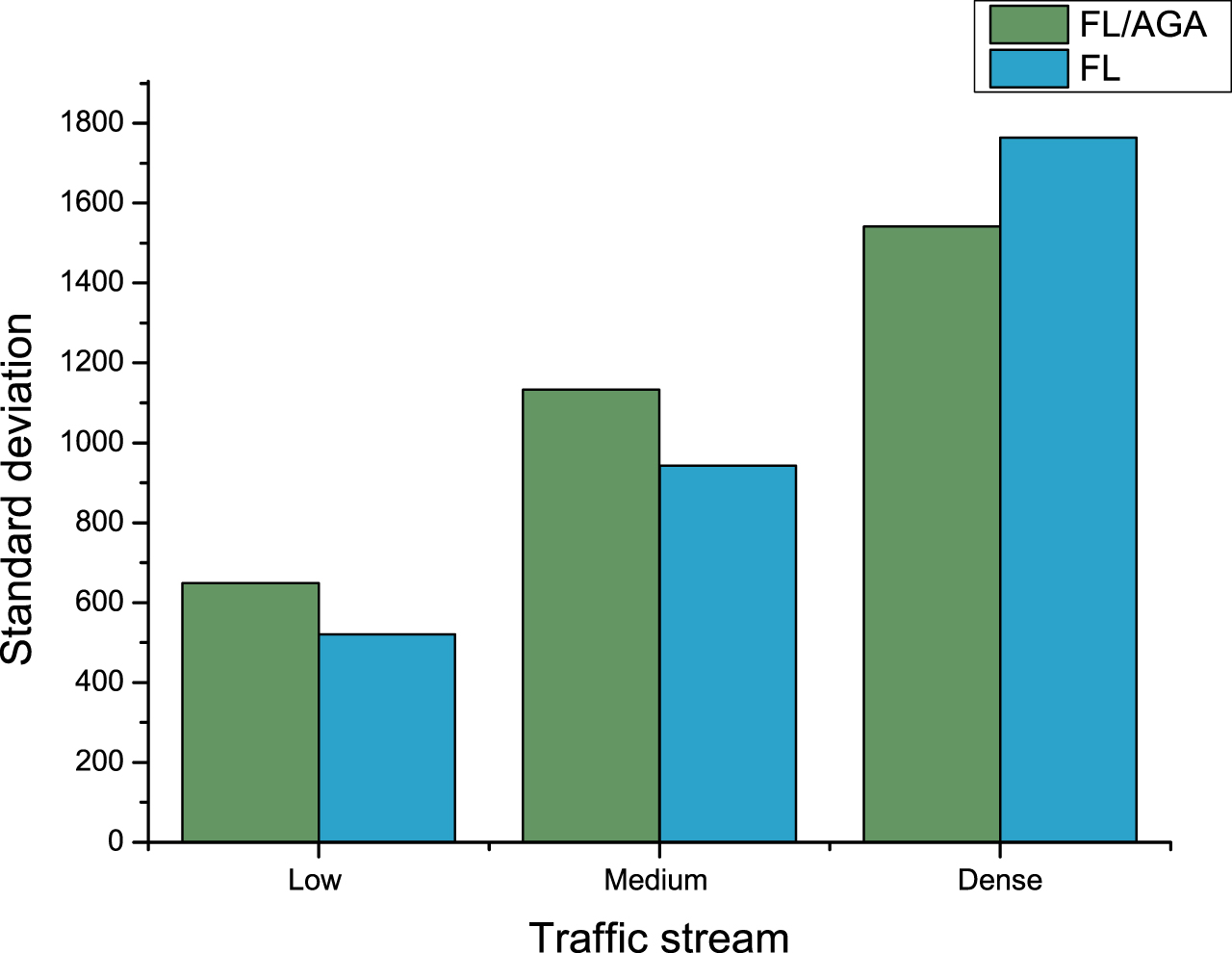
Comparison of the standard deviations of the (FA) values for a crossroads.
From the comparison presented in Table 2 and in Fig. 11, we note that using the hybrid method FLslashAGA provides the lowest wait times in all traffic situations. Execution time of FLslashAGA and AGA for a crossroads. Schematic diagram of crossroads network. The average values of waiting times with respect to road traffic variations in a crossroads network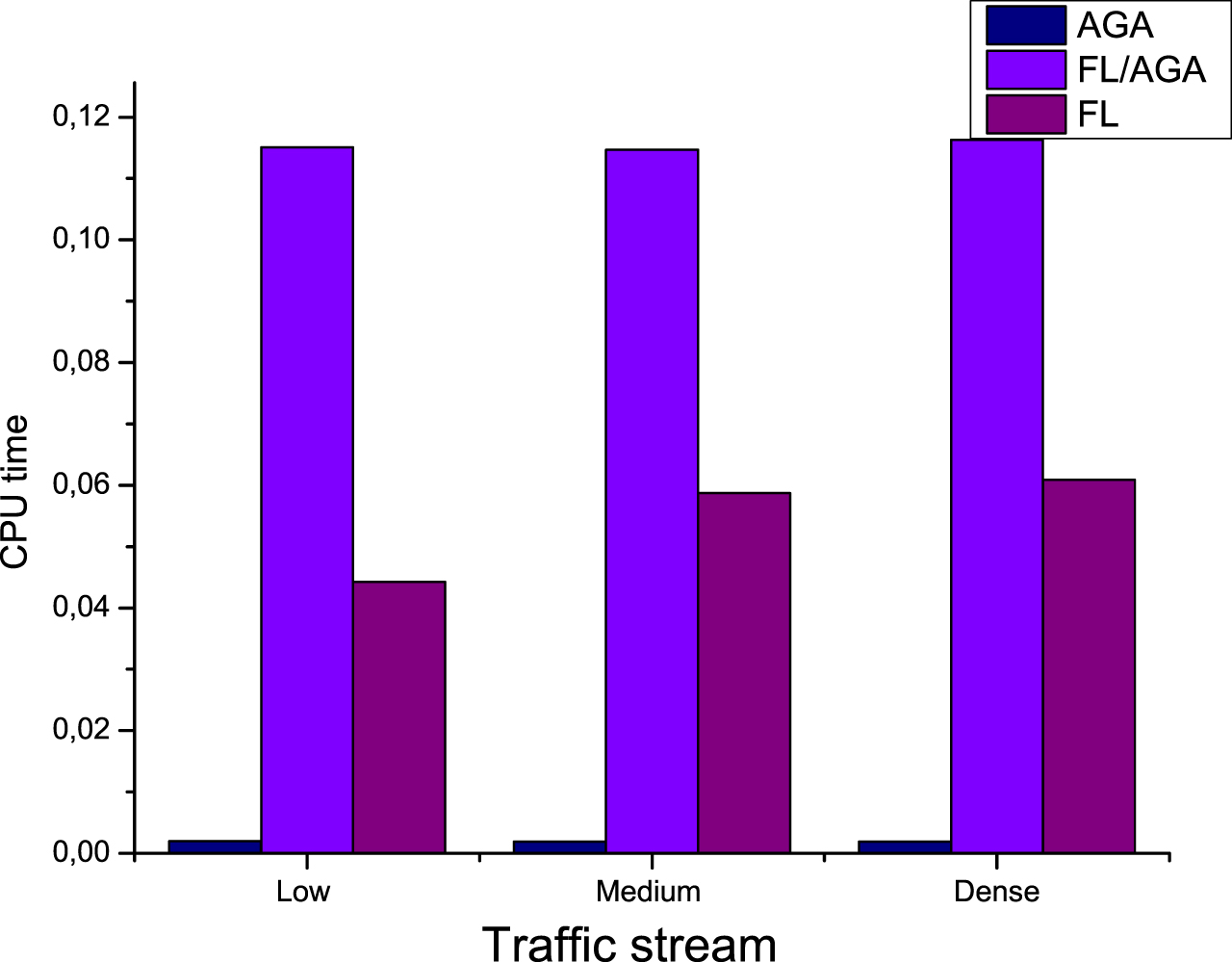
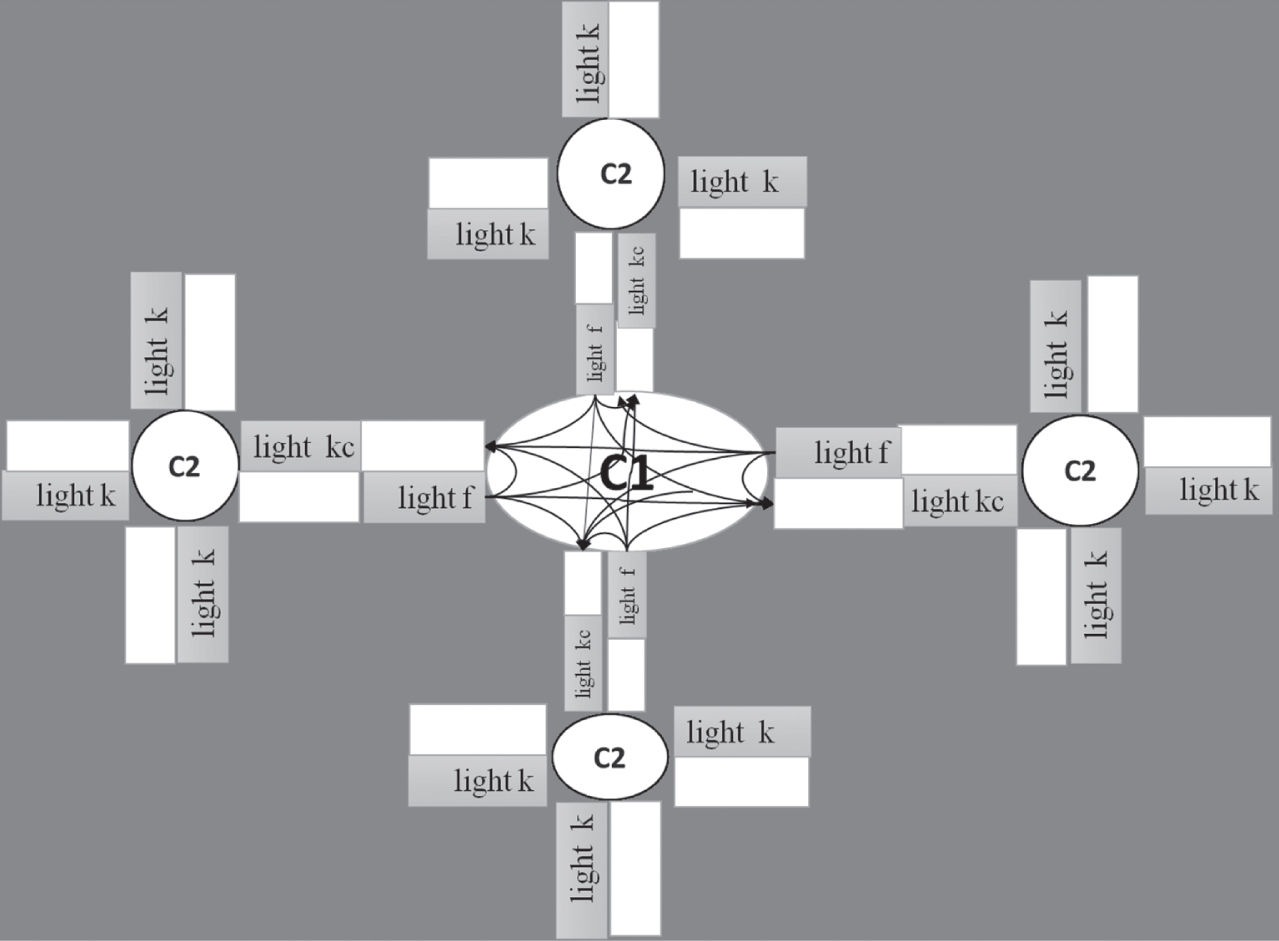
Schematic of a crossroads network
We consider: C1: the main crossroads. C2: the neighboring crossroads. f: a red light at the crossroads C1. f′: the f antagonist. k: a red light at the crossroads C2. kc: a red light at crossroads C2 has an extremity at crossroads C1.
As shown in Fig. 13, the main crossroad C1 receives all the incoming vehicles of C2 crossroads. It consists of a set of lights that are meant to manage the flow of vehicles coming from C2 intersections with a rotation rate expressed as Trf,kc. The neighboring intersections that are not directly related to C1 are noted by k.
The results of implementing the hybrid method on this type of intersections scheme are reported in the subsequent section.
Numerical results
The hybrid method FLslashAGA is applied to a network of intersections presented in Fig. 2. We present in Table 3 and Fig.3 a comparison of the average values of (FA) provided by (AGA), by FL and (FLslashAGA). We present in Fig. 4 a comparison of the standard deviations of the (FA) values. Which we notice that the FLslashAGA stabilizes the results by reducing the standard deviations. The only downside of the FLslashAGA system that it requires more execution time than AGA as it is shown in the Fig. 14.
Waiting times in a crossroads network.
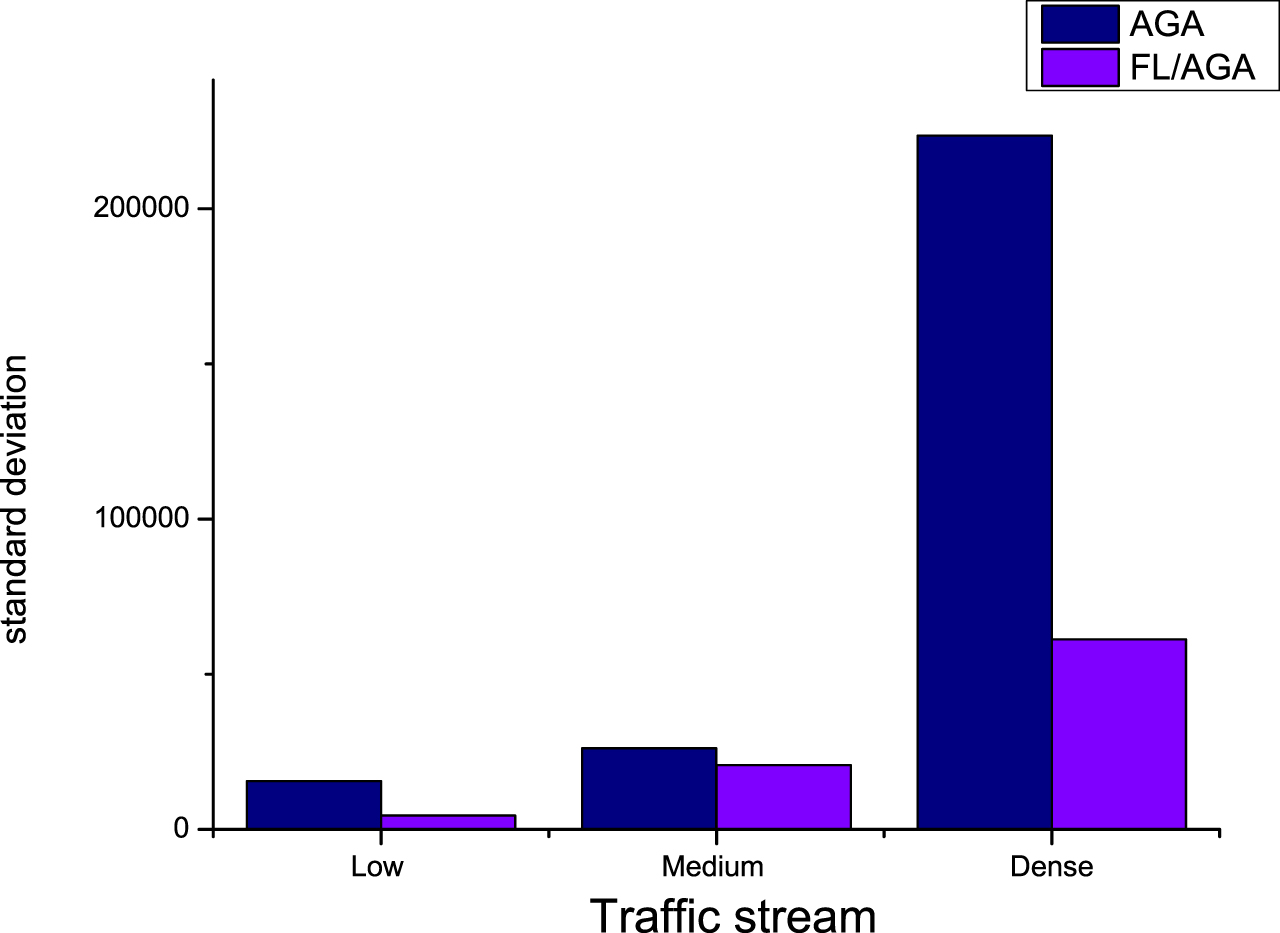
Comparison of the standard deviations of the (FA) values for a crossroads network.
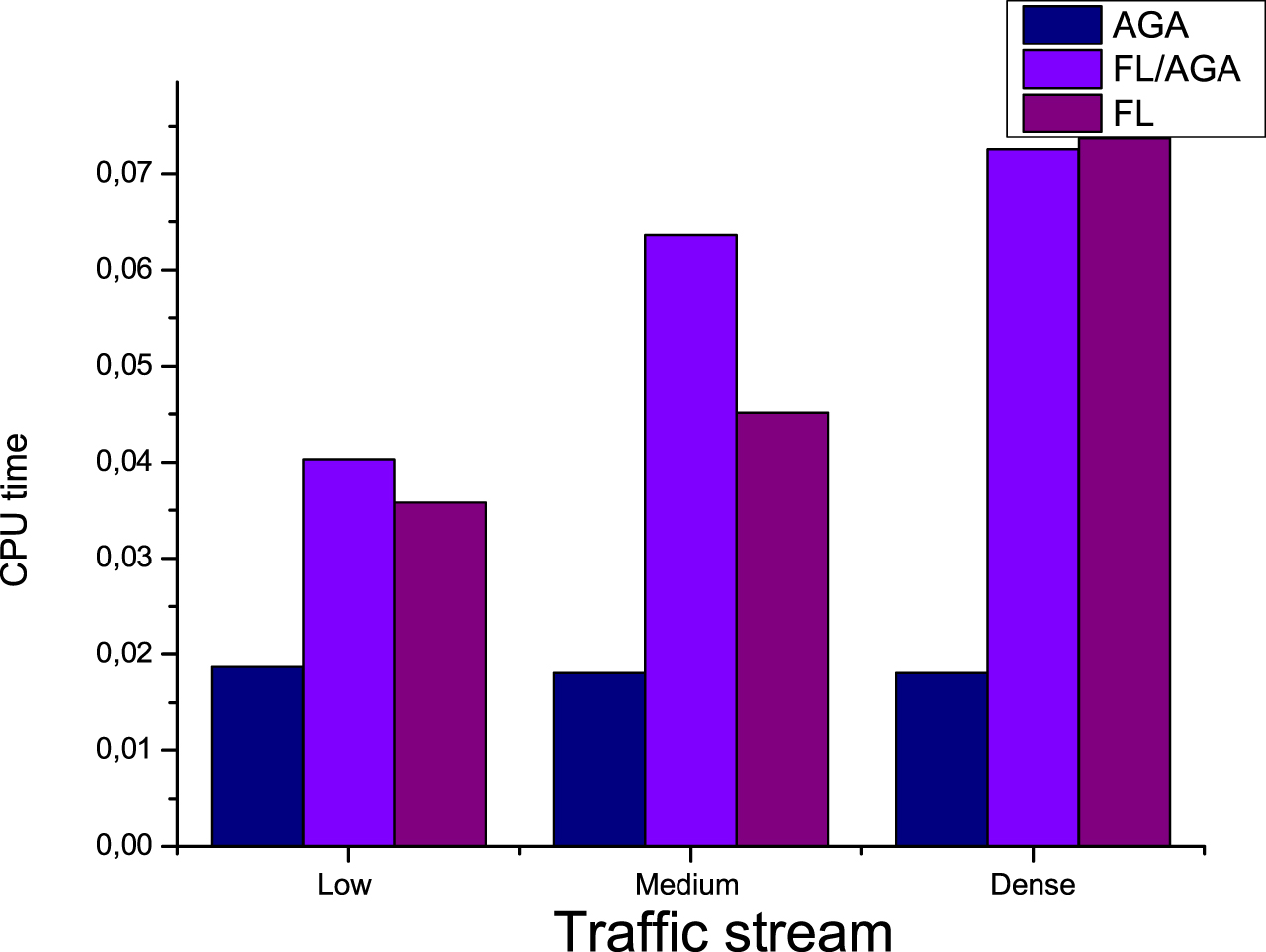
Execution time of FLslashAGA and AGA for a crossroads network.
The proposed model of traffic management has successfully managed a single intersection with traffic light as well as a network of intersections. The management system relies on an acyclic mathematical model which is able to provide a representation of the aforementioned environments with significant accuracy. It also takes into account the environment structure and security as well as its infrastructure plan.
In this paper, we have improved the resolution of the management model by hybridizing fuzzy logic with genetic algorithm.
The significant contribution of the FL consists in providing the GA with the optimal solution in order to narrow the scope of GA research and, thus, limit the effect of diversification.
The method combines fuzzy logic with the genetic algorithm can operate efficiently. The results were significant in so far as the method reduced the waiting time of traffic and accelerate the system operations and computation.
By comparing the hybrid method with GA and FL, the results confirm and prove the effectiveness of the method in optimizing traffic waiting time at a crossroads and at a network of intersections.