
Abstract
This research work focus on level control in quadruple tank systems based on proposed Deep Neural Fuzzy based Fractional Order Proportional Integral Derivative (DN-FFOPID) controller system. This is used for controlling the liquid level in these non- linear cylindrical systems. These model helps in identifying the dynamics of the tank system which gives the control signal feed forwarded from the reference liquid level. But, it fails to minimize the error and the system is also subjected to external disturbances. Hence, to minimize this drawback a novel controller must be introduced in it. The proposed Deep Neural model is a six layered network which are optimized with the back-propagation algorithm. It effectively trains the system thus reducing the steady state error, offset model errors and unmeasured disturbances. This neural intelligent system maintains the liquid level which fulfils the required design criteria like time constant, no overshoot, less rise time and less settling time, which can be applied to various fields. MATLAB/simulink at FOMCON toolbox is used to perform the simulation. Real time liquid control experimental results and simulation results are demonstrated which proves the effectiveness and feasibility of the proposed methods for the quadruple tank system which finds applications in effluent treatment, petrochemical, pharmaceutical and aerospace fields.
Keywords
Nomenclature
A i Level of liquid in lower tank
O oi Cross sectional area of the outlet
O ti Cross sectional area in upper tank
∇ i Flow in upper tank
K pj Speed of the pump
δ02 Noise at the control valve 2
δ04 Noise at the control valve 4
K p Gain of the pump
u1, u2 Speed setting of the pump
ΔKpp, ΔKpD Scaling factors
G c (e) Transfer function of controller
E Error
u (e) Output of the system
β Integral part
μ Derivative part
u1 (k), u2 (k) Voltages for pump 1 and 2
Introduction
Wide applications are witnessed in the field of effluent water treatment plants, pharmaceutical, petrochemical and paper making industries. It is of prime importance for industries to maintain the liquid level in tanks. These must be maintained and monitored by the proper controller system to maintain the levelling set point and to accept new values in dynamic manner. Inorder to meet the required criteria, tuning must be done either in frequency or time which are done effectively by the conventional proportional-integral derivative (PID) controlling system [1]. For automatic controlling of liquid levels, neural controller is implemented in many industries. The neural network can be effectively implemented with algorithms if the challenges in the task are well known [2].
Many research works focus on methods such as sliding mode controller [3], PID with feed forward compensator [4], back-stepping controller [5], linearized feedback controller [6] for controlling the level in tanks. But the main drawback lies in the fact that it requires pre-knowledge of the leveling system. General tank system includes pipes, valves, tanks, pumps and sensors. The liquid type in these tanks and even the aperture can change during any of these operations. This leads to non-linear system characteristics of the tank system. This creates difficulty in obtaining the accurate mathematical system model.
Inorder to overcome these problems, it is necessary to identify the solution to deal with the estimation of non-linear characteristics of the measured signal level. For these quadruple based tank system, the delay compensation is done by sliding mode control system with the non-switching law was proposed by Shah et al. [7]. However the overall overshoot under the four regions is 0.4% and undershoot with 1.9%. This creates faster speed for convergence. The stability is maintained by the Lyapunov approach. Gurjar et al. developed sliding mode on higher order values which creates differentiator with parameter estimator more accurately [8]. Twisting algorithm proposed by Chaudari et al controls the chattering attenuation. This is a step ahead to super-twisting algorithm [9]. The law based on Bernoulli’s theorem and mass conservation act as the disturbance observer creating non-linear feedback linearization with rise time of 4.05ks settling time 16.2 ks and peak time of 2.24 ks [10]. Adaptive inverse evolutionary neural controller was developed by Son et al. This is a hybrid form of feed forward and the PID control system [11]. Fuzzy model with ant colony optimization was proposed by Bououden et al. [12]. The key advantage lies with the identification of non-linear processing of system parameters. Neural model with predictive controlling system was proposed by Cetin et al. [13] which helps in approximation based on functional parametric values.
The fault tolerant system with fuzzy iterative controller for non-linear systems was proposed by Yu et al. [14]. Takagi-Sugeno fuzzy systems uses particle swarm optimization techniques for quadruple tank was proposed by Thamallah et al. [15]. These models helps in identification of nonlinear soft computing based black box modelling techniques which includes fuzzy logic, SVM and neural networking systems which provide information to design these controlling systems. To override the drawback of the feedback error;earning, several methods have been proposed which uses type-1 fuzzy [16], type-2 fuzzy [17], CMAC [18] and also recurrent neural fuzzy [19] systems to increase the ability of controlling quality.
Global optimality is obtained by Evolutionary Algorithms (EA) which helps to train the neural networking systems. The gradient spectral based entropy with machine learning system is developed to improve the prediction performance rate [20, 21]. There are many EAs which are applied to neural network identification systems like PSO, GA [22], ACO [23], WOA [24] and so on. These conventional optimization problems does not get satisfactory results. Many of these recent studies have modified or combined the conventional algorithms for solving these complex problems. The multiple population strategy with ACO algorithm is an co-evolutionary algorithm using balanced convergence speed with diversity on solution controlling mechanisms [25]. The forecast on electricity demand was trained by neural networking hybrid GA-PSO system methods. This method was developed by Suganthi et al. [26]. Despite of initial parametric values, the Differential Evolution technique finds its meritorious fact in getting the global optimal values. DE with back propagation system was proposed in [27, 28]. Son et al. developed modified DE for identifying 3,4-degree of freedom adaptive neural network on robot arm which act as redundant manipulator [29–31]. A new Fuzzy Fractional Order Proportional Integral Derivative (FFOPID) controller is developed by Jegatheesh et al. [32] to control the liquid level. For the purpose of controlling the liquid level in a spherical tank that is treated as a fractional order system, a fractional order proportional integral derivative controller is created. The multi-layer perceptron network is built for deep learning, and the output from the neural module activates the fuzzy inference system’s rules. Using unified multi-swarm particle swarm optimization, the parameters of the deep perceptron neural network (DPNN) are tuned for close to optimal results, and the optimised DPNN then chooses the parameters of the fuzzy inference system. The PID controller’s gain values are tuned using a deep learning neural network with a fuzzy inference method, which also effectively regulates speed [33]. The controllers are operated by tweaking gains with same parameters of particle swarm optimization after first designing a fuzzy PD+I controller using five membership functions (PSO). By connecting each renewable energy source separately to the biogas/micro-hydro generator, which notices an increase in variations with penetration, the reactions of the proposed microgrid are studied. Finally, the addition of a biodiesel generator effectively reduces frequency variations of the system [34]. A fractional-order terminal sliding-mode (FOTSM) based deep convolutional neural network (DCNN) control technique for tracking control of stiff robotic manipulators. As a result, the switching gain is substantially smaller than intended. Combining DCNN and FOTSM reduces chattering phenomena while enhancing rigid robotic manipulator control performance. Avoiding differentiating the exponential terms is the solution to the singularity problem [35]. To manage the frequency of a realistic multi-area multi-source (thermal-hydro-gas) linked power system, a novel salp swarm algorithm (SSA) optimised fuzzy-based proportional-integral-derivative filter (FPIDF) controller with redox flow battery (RFB) is used [36]. In order to effectively promote AGC recital in electric power systems integrated with RES like solar, wind, and fuel cells, a cascade-fractional order ID with filter controller has been created. It is successful to use the imperialist competitive algorithm to optimise the controller parameters [37]. [38] proposes an AGC method based on a layered recurrent artificial neural network (ANN). For the analysis, a two-area system made up of DFIG-equipped non-reheat thermal turbines connected through parallel AC/DC tie-lines is taken into consideration. Consideration is given to the non-idealities of the system, such as governor latency and generating rate restrictions.
Research gap identified
The quadruple based cylindrical systems are highly non-linear in nature when compared to other tank systems such as spherical, conical etc. Among most of the intelligent systems, fuzzy based systems are capable to effectively control the liquid levels. Thus, the time domain specifications can be effectively controlled by using the fuzzy based FOPID controllers where most of the existing techniques fails to do so. Increase in steady state error, offset error and disturbances.
Contributions of proposed work
In this paper, Deep Neural Fuzzy based Fractional Order Proportional Integral Derivative (DN-FFOPID) controller is proposed to control the liquid level in quadruple tank system. This proposed technique effectively address the following issues.
The main advantage of using proposed FFOPID with deep neural networking system helps to control the liquid level effectively on real time implementation, better performance with good time domain functional characteristics. This proposed deep neural networks is developed based on 6-layered network system working on back propagation mechanisms. It trains the system reducing the steady state error, offset errors and unmeasured disturbances. Set point performance tracking to maintain the set point levels even in presence of external disturbance are studied for effective demonstration of this proposed advanced algorithm. Error is also proved to be minimized and bounded by the proposed technique. To evaluate the proposed DN-FFOPID controller, real time control and simulation results demonstrate the effectiveness and feasibility of the proposed technique.
Paper organization
Section 2 gives the physical model of the quadruple tank system. Section 3 introduces the proposed DN-FFOPID controller for controlling the liquid level. The simulation and the experimental results are presented in section 4. Section 5 holds the conclusion part.
Mathematical model for quadruple tank system
Non Linear tank system which undergoes larger time delay and strong coupling characteristics is shown in Fig. 1. The quadruple tank system is designed with two inputs, two outputs and pumps with specific voltages. A
i
is the level of liquid in lower tank, O
oi
is the cross sectional area of the outlet. The cross sectional area and the flow in upper tank system are given by O
ti
and ∇
i
. The speed of the pump setting with the corresponding gain K
pj
is given by SP
j
. The noise at the control valves is given by δ02 and δ04. This linearization around the operating point is described in [39]. The mass balance of the differential equation is given in Equations (1)–(4) as follows:
Model for Quadruple tank interacting system.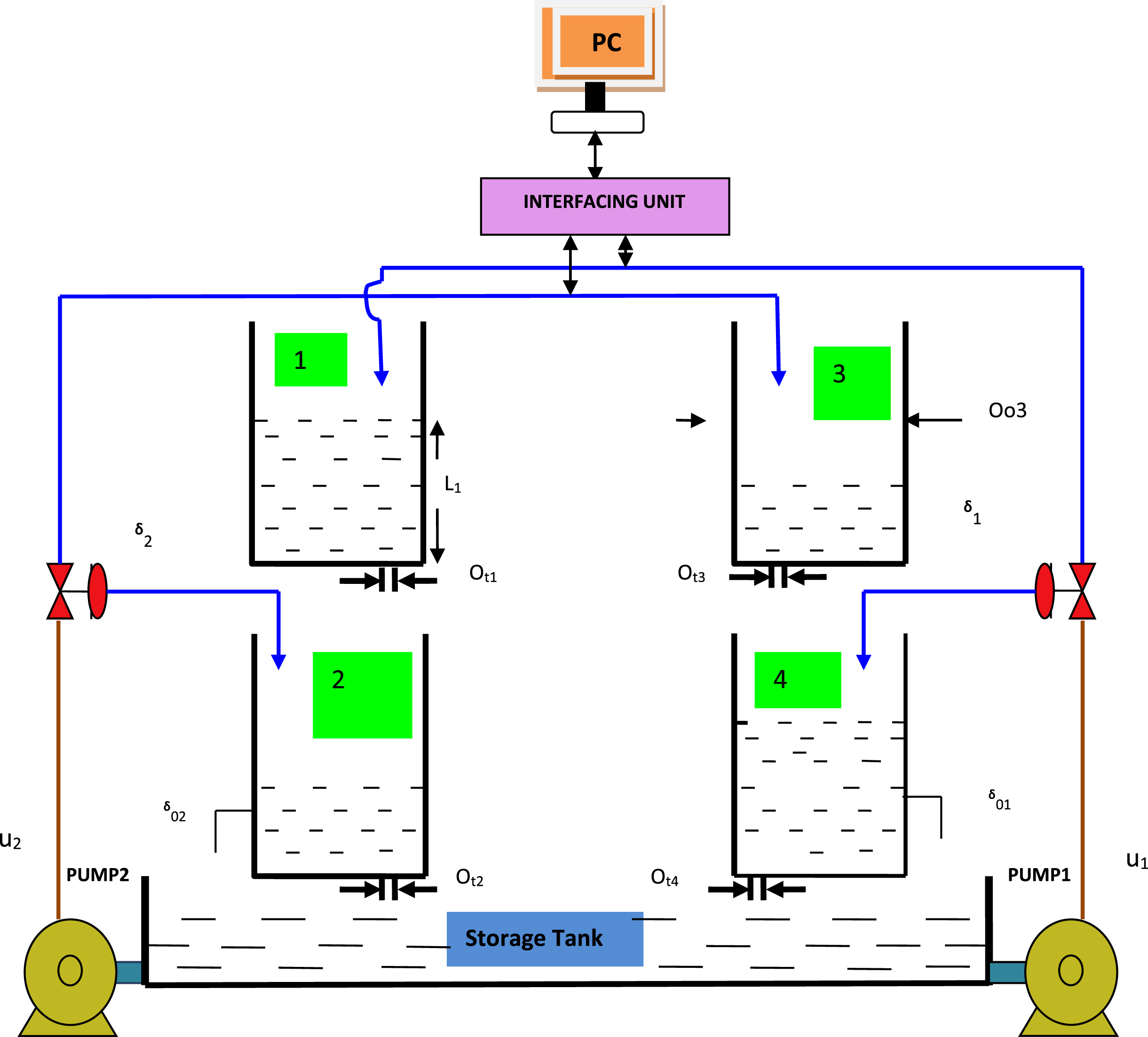
The aim of the research work is to control the liquid level in tank 2 and tank 4 which works on tracking the reference based signal system with the uncertainty and noise measurement. The specifications of the four tank system is given in Table 1 as follows,
Specifications of spherical tank
This section explains a novel method of Deep Neural Fuzzy based Fractional Order Proportional Integral Derivative (DN-FFOPID) controller for the quadruple tank cylindrical systems. The system schema of the proposed controller is given in Fig. 2.
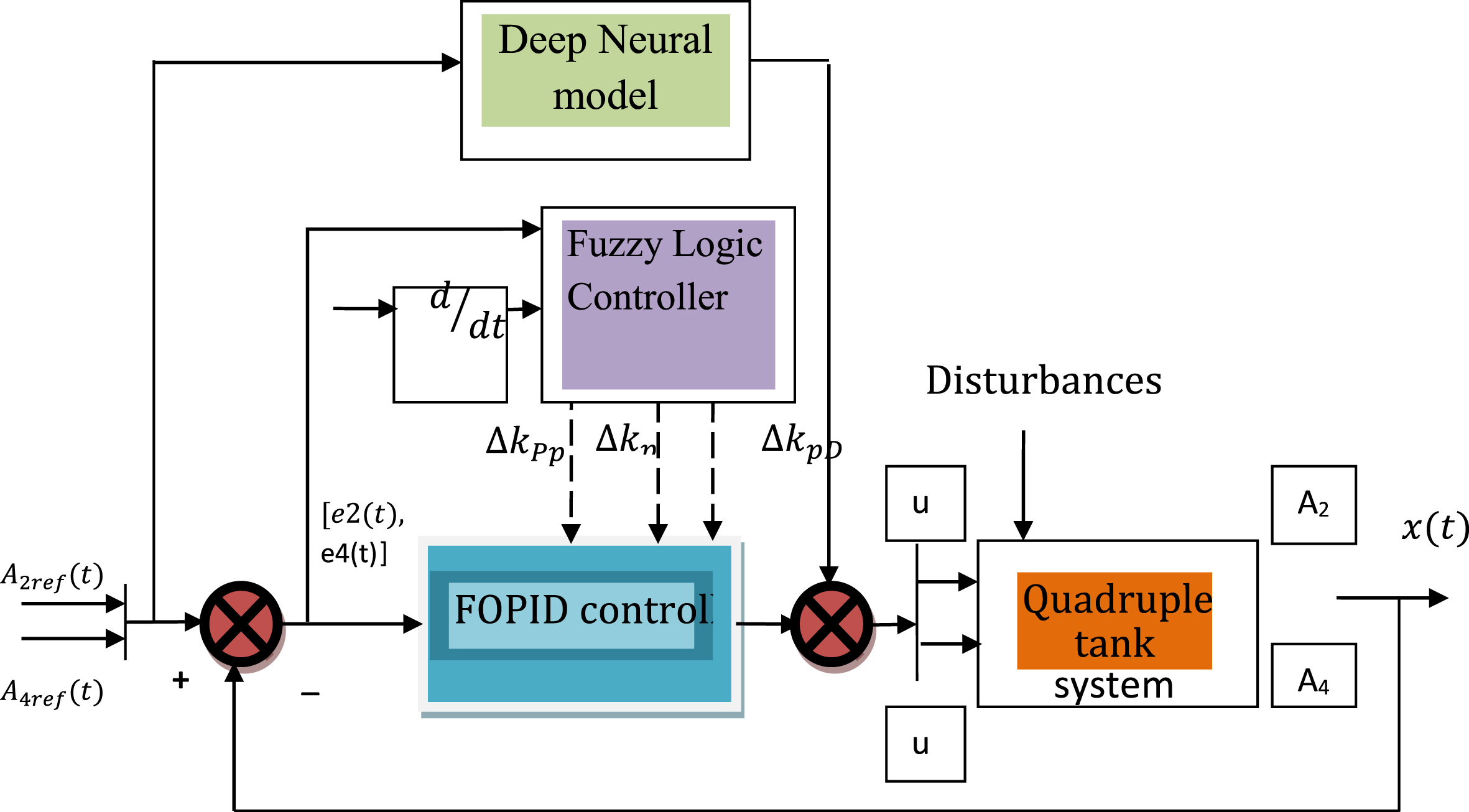
Schematic flow of DN-FFOPID controller for quadruple tank system.
These are dependent mainly on the gain parameters of FOPID controlling paradigm. Thus to design the controlling system of FOPID, the final gain values are computed from the equation (5),
Better performance is obtained using fuzzy optimized controllers which performs better when compared to other state of art methods. The voltage control signal generated by the FFOPID controller error signal between the signal trajectory and the output level is given in equation (6),
The weight of the DN model is trained and adjusted to control the real time factors of quadruple tank system for system operation with u
DN
by error control to minimize the sum-of-squared error. which is given by equation (7),
The proposed deep learning model enables to learn the varying characteristics of the quadruple tank systems. The main reason for the use of the proposed system is that it effectively integrates the stochastic, optimal and process control with transport delay timing values. This proposed deep learning model gives a good feed forward portion for the FFOPID controller in level controlling of the quadruple tank systems.
The proposed controller with Deep Neural FFOPID effectively guarantees the asymptotic stability for the global optimization for the entire system. For the asymptotic system of convergence the studies in [40] are based on Lyapunov system analysis where the relations are based on the conditions for asymptotic convergence which are applied on the second order layered system with single input single output systems. The FEL controlling system with type-2 fuzzy PID controlling parameters were select3d by the trial and error phenomenon to bring out the stable system [41]. For the transfer function of controller G
c
(e), E as the error component with u (e) as the output of the system, transfer function for the proposed DN-FFOPID controller is given in equation (8) as follows,
Kpp, Kp1, and KpD are the corresponding gains of the proportional system, integral, and derivative terms. The integral part with the fractional component is given by β. μ act as the derivative part of the controller. The time domain representation of the DN-FFOPID system is given by equation (9)
A novel approach to approximate a general integer-order approximation system is put forth in this research paper. Specifically, using a data-driven methodology, an integer-order state-space model in descriptor form is obtained from a collection of frequency-domain input-output data pairs. For any practical functional systems, the integer order approximation can be estimated through G(x) in equation (10),
From the above equation (10), x value ranges from the interval [ω
N
, ω
n
]. Thus the above equation is considered as a state space values that has state space companion structural values. The triangular membership function with the input output fuzzy sets and Mamdani fuzzy system with control signal is given by the equation (11),
u
FFOPID
is the voltage signal generated by the DN-FFOPID controller that is entirely based on the error that occurs between the reference signal and the level based output. The parameters of Kpp = [Kpp1, Kpp2] , Kp1 = [Kp11, Kp12] , KpD = [KpD1, KpD2] are selected which should guarantee the system stability with minimal cost function. The mean squared error is given in Equation (12) as follows,
During the process of controlling the level in tank systems which are influenced by the noise and uncertainty, the Deep neural network helps to overcome. This model is updated so as to realize the back propagation with the learning rate minimization strategy. The parameter update law is given by the Equations (13)–(15) as follows,
In this section, the DN-FFOPID controller helps to effectively control the liquid level of quadruple tank systems which uses the non-minimum phase, 0 ≺ β1 + β2 ≺ 1, where β1 = 0.45 and β2 = 0.4. The most important parameters is evident from the control valves are in the ratios δ02 and δ04. Based on the information obtained from these parameter, the accuracy of the controller with the observer is obtained.
Simulation results
The quadruple tank system is subjected to simulation using the Matlab 2018 platform to effectively perform the data collection operation. The input dataset consists of the signals with the voltages u1 (k) and u2 (k) for pump 1 and pump 2 respectively. The output signals from the water level tank 2 and tank 4 were collected. A2 and A4 are the level of liquid in lower tanks. The dataset with the change in amplitude level from 0 to 1 with the change in input voltage is described. The control valve opening for the tank 2 and tank 4 is shown in Fig. 3. The average value of the steady state is calculated which is effectively implemented with the DN-FFOPID controller. This proposed method does not require any filtering as the outputs are obtained with the attenuation to noise values at minimum levels.

Estimation of Control valve opening (a) tank 2 (b) tank 4.
The control valve gains are considered for experimentation. using the constants and parameters, the quadruple tank systems are rewritten as in Equation (16) with the set points as 10 cm for tank 2 and 8 cm for tank 2 respectively.
The key objective of the proposed controller is to achieve the settling time which should be of less than 15 seconds. The gains from the controller and the observer system are tuned to maintain the liquid levels of the tank. The simulation results for quadruple tank system using the DN-FFOPID controller is operated with the operating point of 30 cm, even in the presence and also in the absence of the disturbance values. At the absence of disturbances, the level responses corresponding to four regions are shown in Fig. 4(a). In the presence of disturbance with the level at 15 lph, 10lph and 5 lph at time t = 2 min, the response of DN-FOPID corresponding to the four regions are given in Fig. 4(b), 4(c), 4(d) respectively.
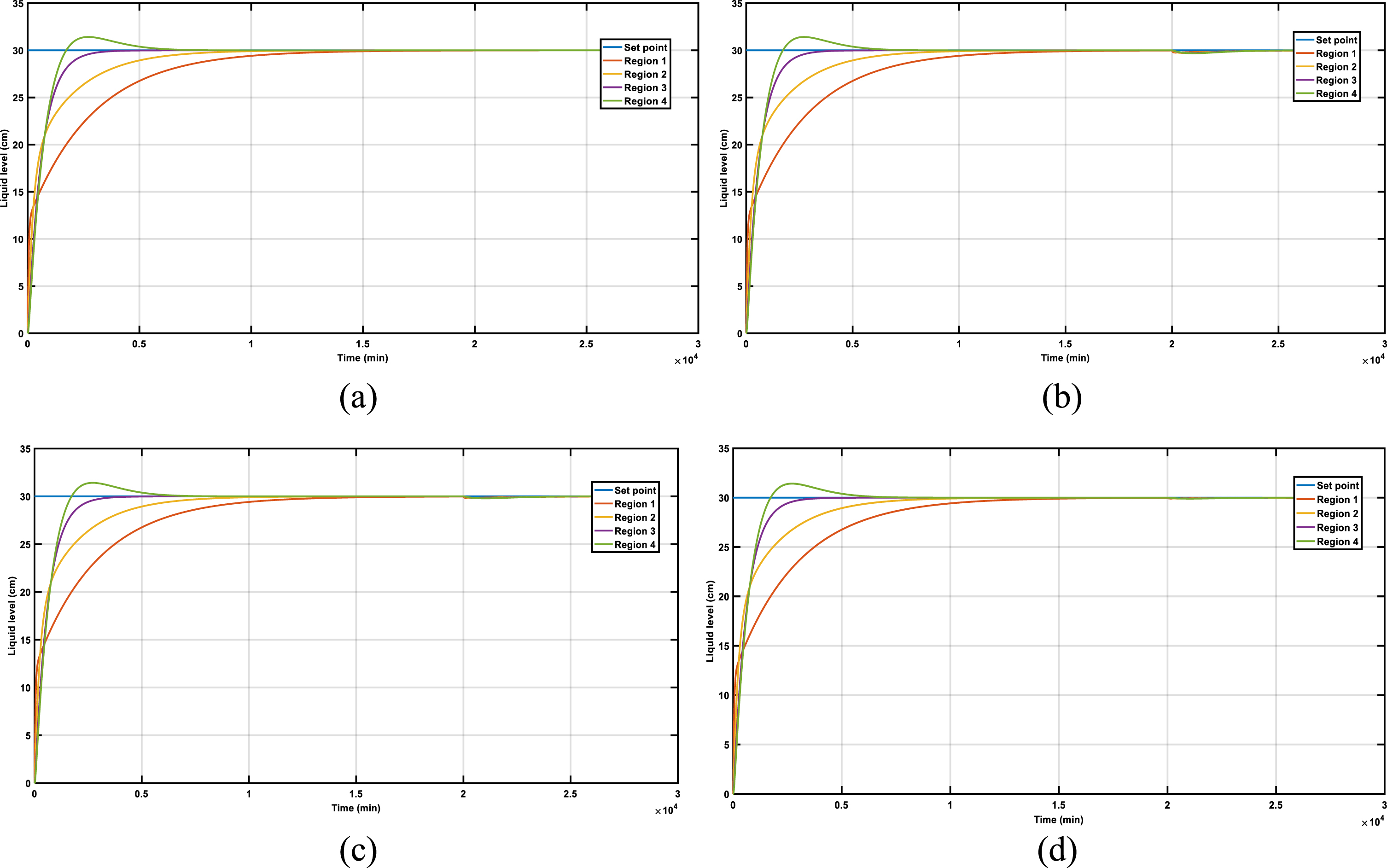
Comparative level responses at SP = 30 (a) absence of disturbance; presence of disturbance at (b) 15 lph (c) 10 lph (d)5 lph at t = 2 min.
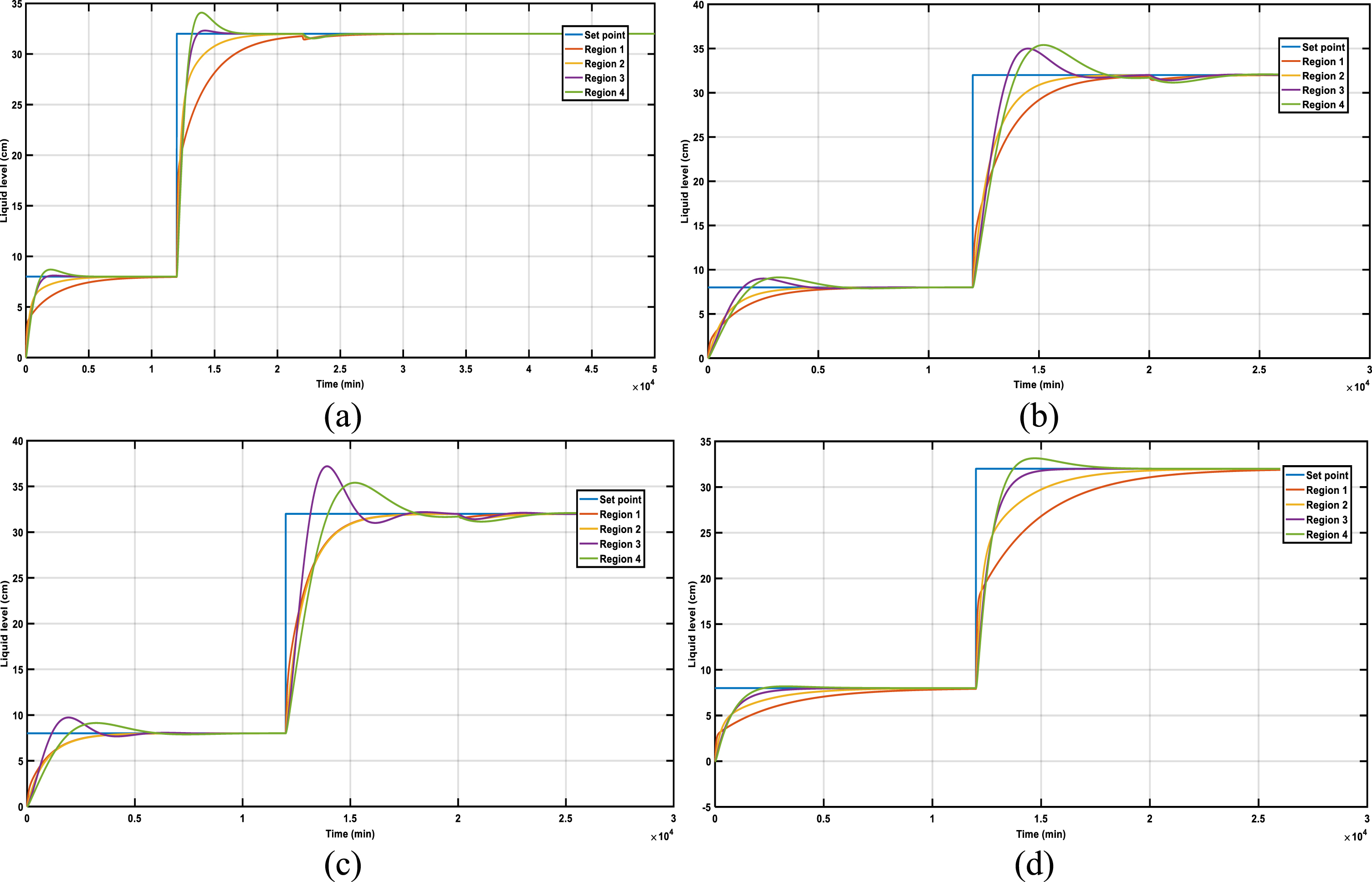
The DN-FFOPID controller with the operating point at steady state values of 32 cm in the presence and also in the absence of the disturbance values. At the absence of disturbances, the level responses corresponding to four regions are shown in Fig. 5(a). In the presence of disturbance with the level at 15 lph, 10lph and 5 lph at time t = 2 min, the response of DN-FOPID corresponding to the four regions are given in Fig. 5(b), 5(c), 5(d) respectively.
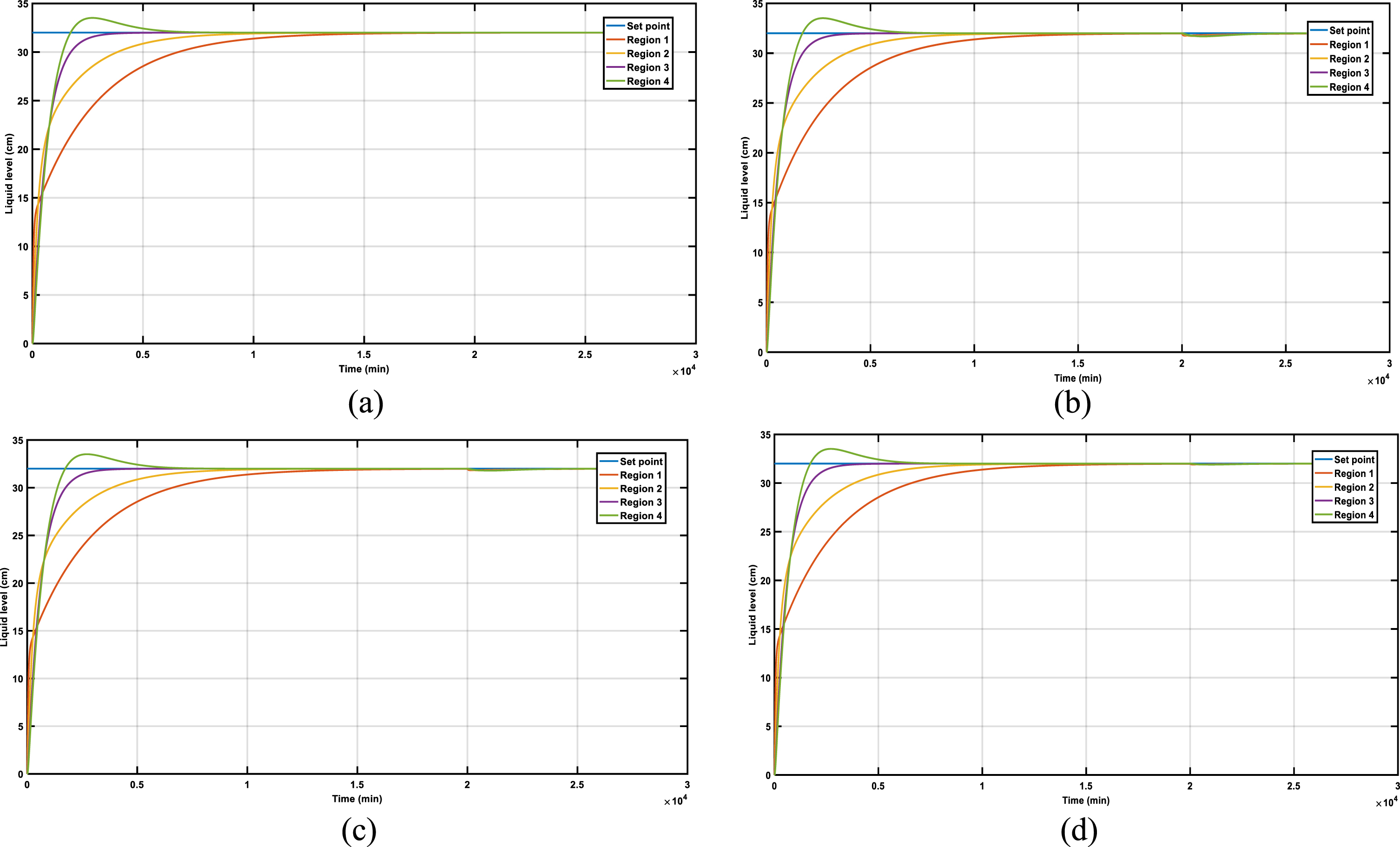
Comparative level responses at SP = 32 (a) absence of disturbance; presence of disturbance at (b) 15 lph (c) 10 lph (d)5 lph at t = 2 min.
Experimental results with respect to overshoot, rise time, peak time, settling time along with the steady state error is given in Table 2 for the quadruple tank system with DN-FFOPID controller. Region 1 is with rise time of 0.325 ms, peak time 0.004 ms, settling time as 0.002 ms, 0% overshoot and 0% undershoot. Region 2 is with rise time of 2.127 ms, peak time as 0.006 ms, settling time as 1.008 ms, 0% overshoot and 0% undershoot. Region 3 shows rise time of 5.3 ms, peak time as 0.008 ms, settling time as 2.012 ms, 0% overshoot and 0% undershoot. Region 4is with rise time of 10.7 ms, peak time as 0.007 ms, settling time as 4.7 ms, 0% overshoot and 0% undershoot respectively. The time integral specifications like ISE, ITAE and IAE for these regions with DN-FFOPID Controller is tabulated in Table 3.
Presence of disturbance - time domain specifications
Presence of disturbance –time integral performance
Thus by the use of the proposed DN-FFOPID controller, the steady state error is reduced. The overall values of the ISE, ITAE and IAE time integral performance values are lower in proposed controlling system when compared to other state-of-art methods. Table 4 shows the membership rule for the fuzzy system with (NB), Negative Small (NS).
Fuzzy rule based membership function
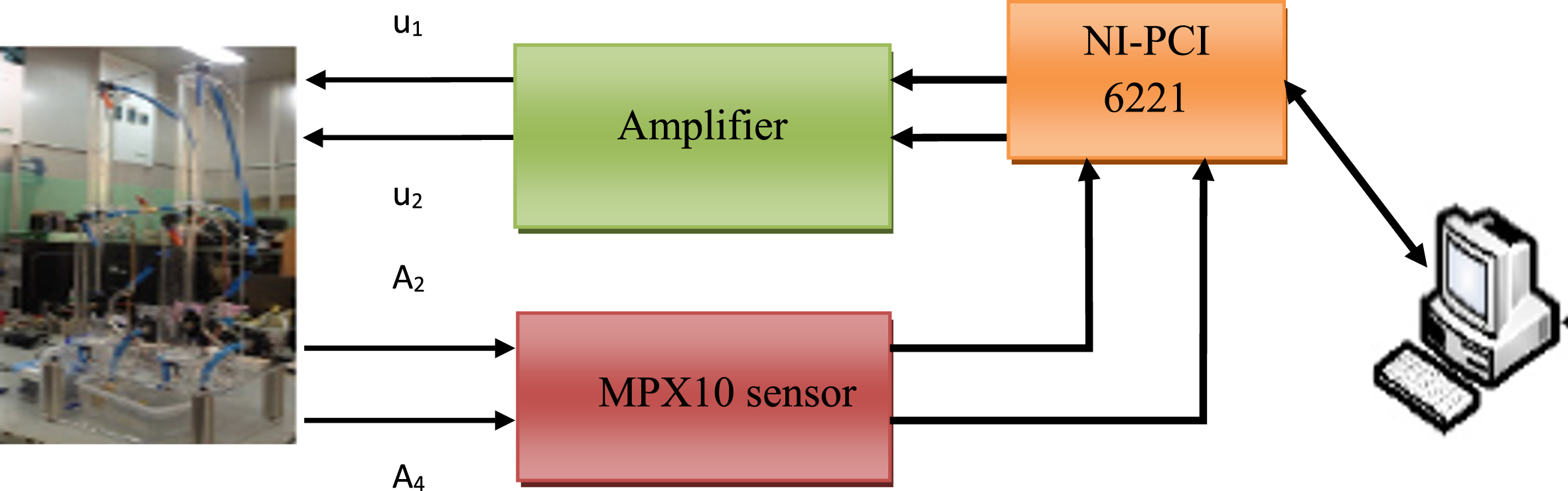
The experimental system of quadruple tank has been studied. The block diagram of the experimental quadruple tank system has been described in Fig. 6. The hardware results with the performance comparisons using the DN-FFOPID controller at various steady state operating point in the presence and absence of disturbance are also detailed in this session.
The pump is with 24 V supply of Ogihara engine with different flow rate is implemented. The operating range of 30-70% maximum voltage is obtained from the motor pumps to pump the water into the tank. The strain gauge MPX10 measures the water level in quadruple tank systems. The detains of the equipment with the specified parameters are described in Table 4.
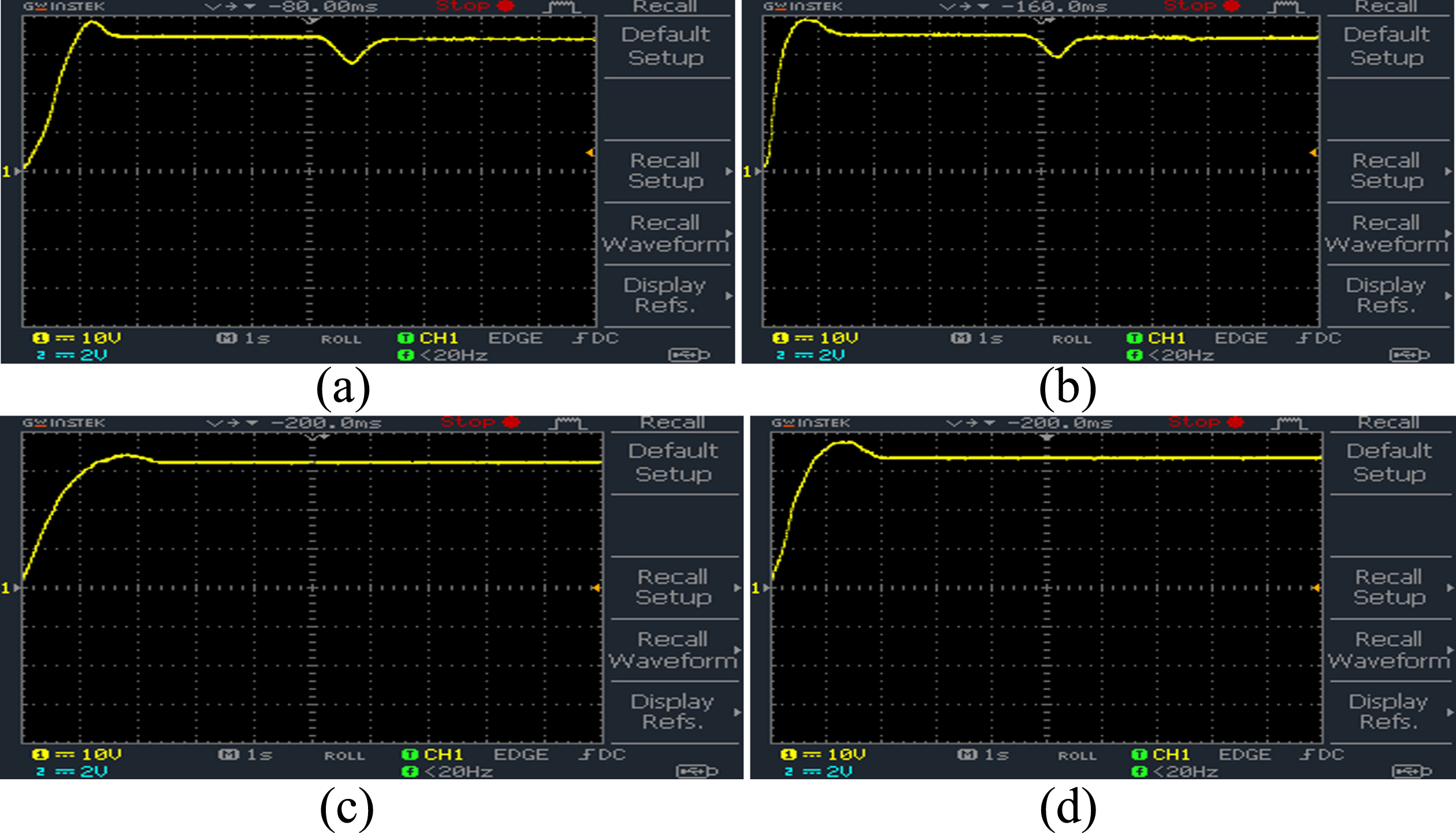
Set point tracking of DN-FFOPID controller at the presence of disturbance.
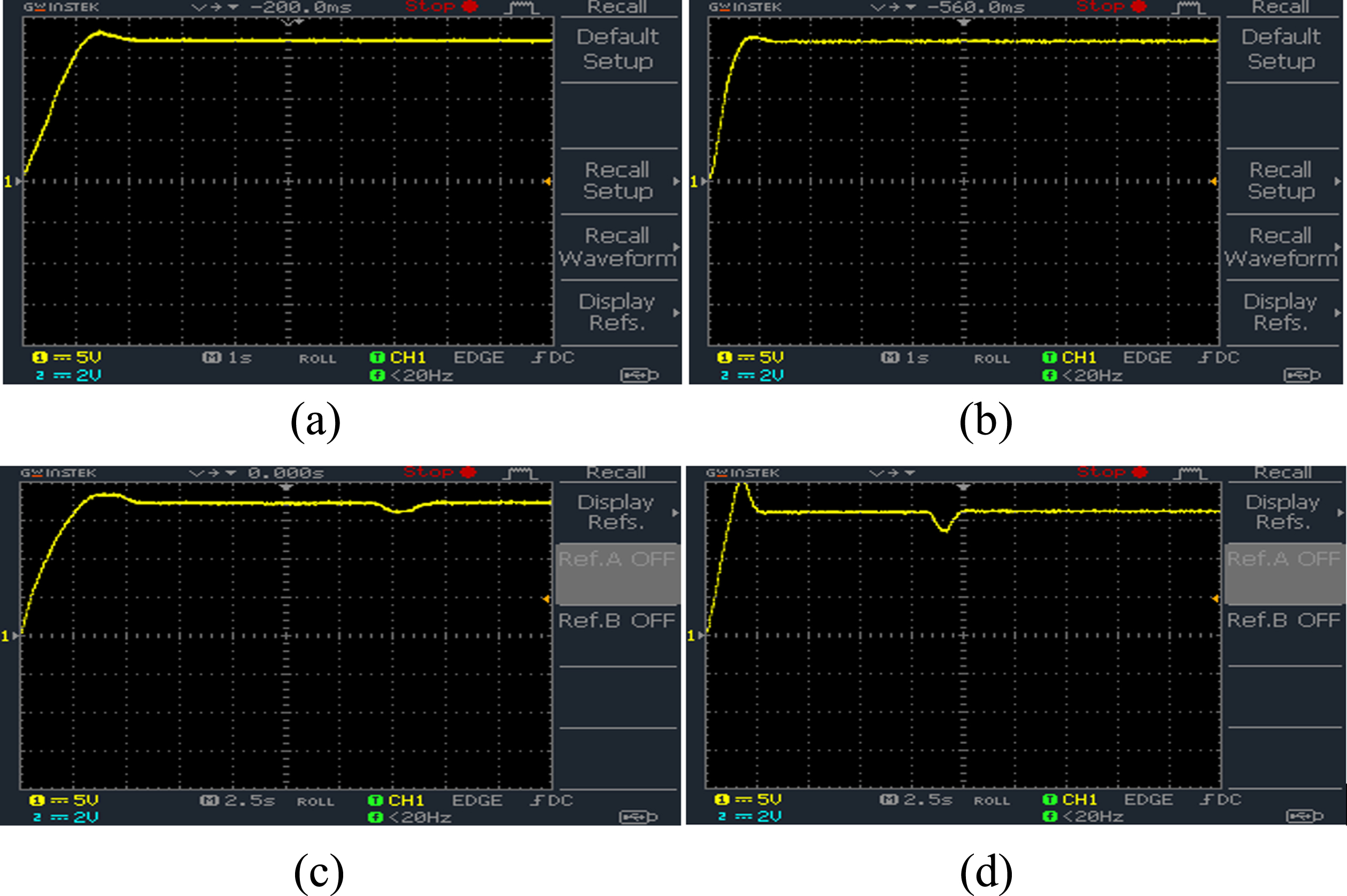
DN-FFOPID controller SP = 17 at t = 2 min (a) Output Trajectory with step input for Region 2 (b) Output Trajectory with step input for Region 4 (c) Hardware response in the presence of disturbance at 15lph for Region 2 (d) Hardware response in the presence of disturbance at 15lph for Region 4.
Figure 7 (a) and 7 (b) describes the output trajectory for the DN-FFOPID controller with the step input for Region 2 and Region 4 respectively. Figure 7 (c) and 7 (d) shows the hardware response in the presence of disturbance at 15lph for Region 2 and Region 4 respectively. Figure 8 (a) and 8 (b) shows the hardware response in the presence of disturbance at 10lph for Region 2 and Region 4 and Fig. 8 (c) and 8 (d) shows the hardware response in the presence of disturbance at 5lph for Region 2 and Region 4 respectively.
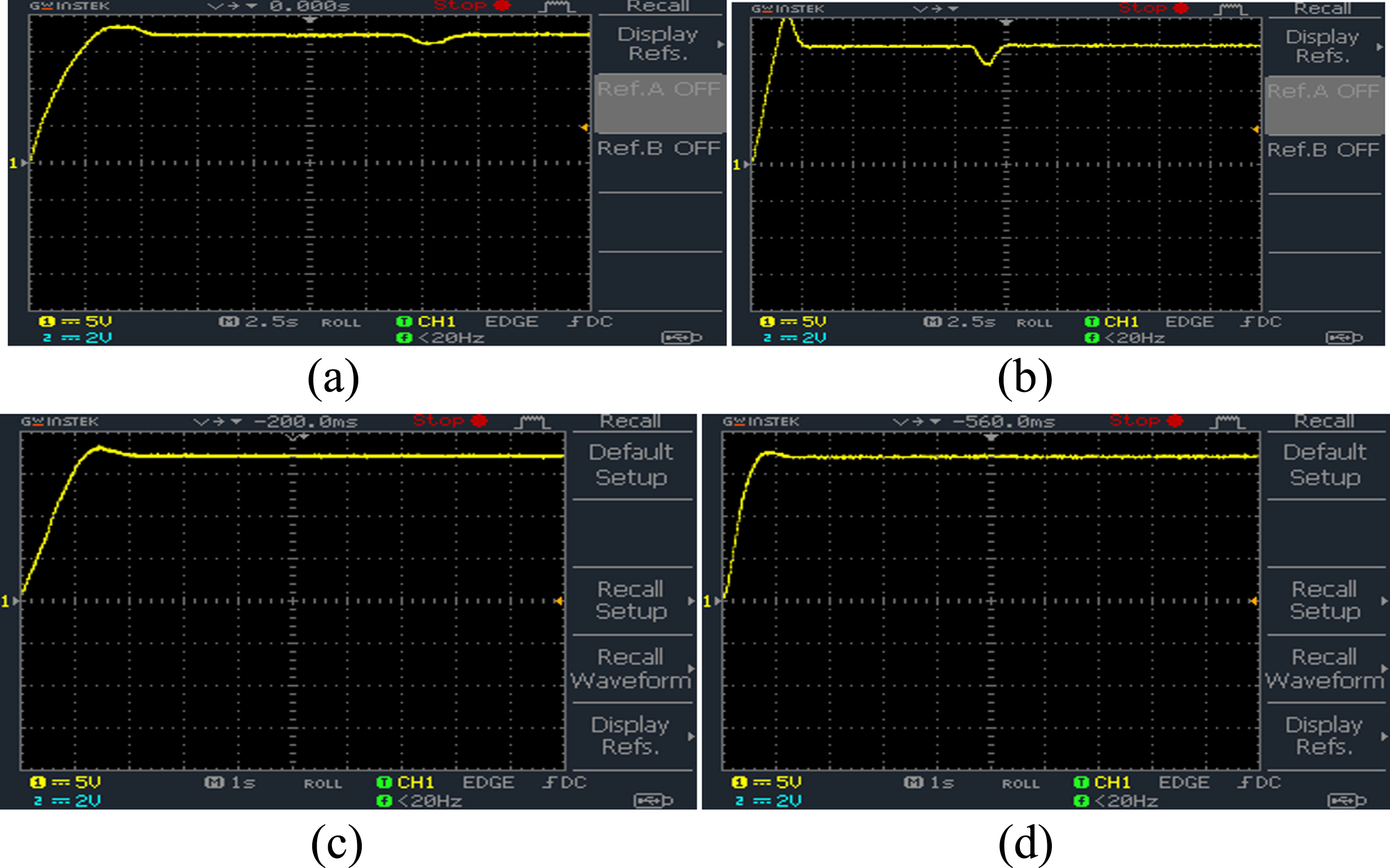
DN-FFOPID controller SP = 17 at t = 2 min (a) Hardware response in the presence of disturbance at 10lph for Region 2 (c) Hardware response in the presence of disturbance at 10lph for Region 4 (c) Hardware response in the presence of disturbance at 5lph for Region 2 (d) Hardware response in the presence of disturbance at 5lph for Region 4.
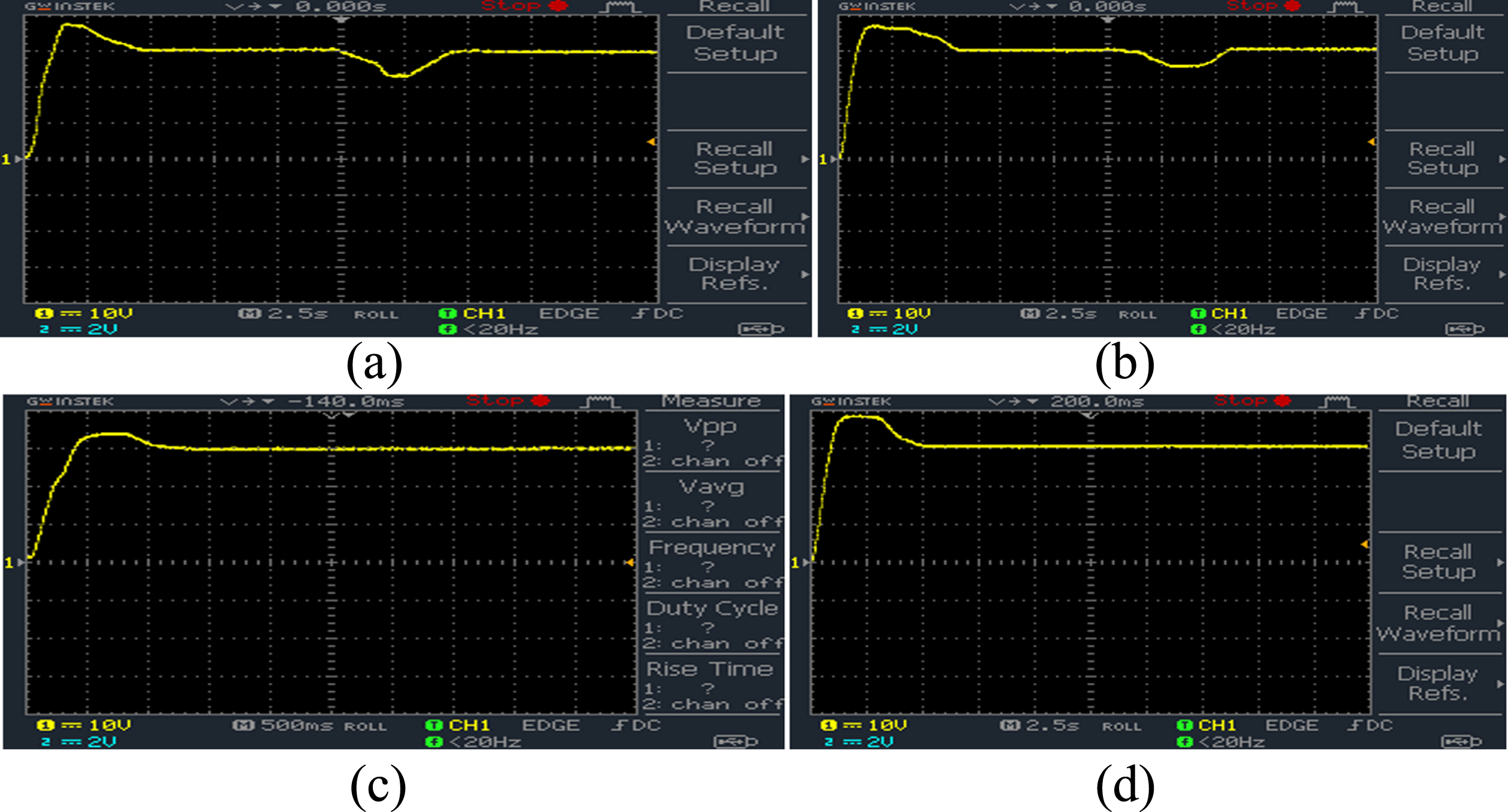
For the quadrupled tank system with DN-FFOPID Controller at steady state operating point of 30 cm, in the absence of disturbance are shown in Fig. 9 (a) and 9 (b) and in the presence of disturbance are shown in Fig. 9 (c), 9(d) respectively. The presence of disturbance at 10 lph and 5 lph in shown in Fig. 10 respectively.

DN-FFOPID controller SP = 30 at t = 2 min (a) Output Trajectory with step input for Region 2 (b) Output Trajectory with step input for Region 4 (c) Hardware response in the presence of disturbance at 15lph for Region 2 (d) Hardware response in the presence of disturbance at 15lph for Region 4.
DN-FFOPID controller SP = 30 at t = 2 min (a) Hardware response in the presence of disturbance at 10lph for Region 2 (c) Hardware response in the presence of disturbance at 10lph for Region 4 (c) Hardware response in the presence of disturbance at 5lph for Region 2 (d) Hardware response in the presence of disturbance at 5lph for Region 4.
The hardware results and performance comparisons of the quadruple tank system with DN-FFOPID Controller at steady state operating point of 32 cm, in the absence of disturbance are shown in Fig. 11 (a) and 11(b) and in the presence of disturbance are shown in Fig. 11(c), 11(d) for region 2 and 4 with 15 lph. The presence of disturbance at 10 lph and 5 lph in shown in Fig. 12 respectively.

DN-FFOPID controller SP = 32 at t = 2 min (a) Output Trajectory with step input for Region 2 (b) Output Trajectory with step input for Region 4 (c) Hardware response in the presence of disturbance at 15lph for Region 2 (d) Hardware response in the presence of disturbance at 15lph for Region 4.
DN-FFOPID controller SP = 32 at t = 2 min (a) Hardware response in the presence of disturbance at 10lph for Region 2 (c) Hardware response in the presence of disturbance at 10lph for Region 4 (c) Hardware response in the presence of disturbance at 5lph for Region 2 (d) Hardware response in the presence of disturbance at 5lph for Region 4.
The effectiveness of the proposed DN-FFOPID system, the algorithm is verified in the real-time tested along with the disturbance rejection capability against uncertainties. It requires less time to converge the output to its desired level smoothly with small steady state error in Table 5. It clearly identified that, the ANFIS SMC FOPID controller delivers good control action even the load disturbances are removed such that output requires less time to converge to its desired liquid level. Steady state error is lower in proposed DN-FFOPID Controller.
The parameters of the system with pump and MPX10
To evaluate the effectiveness of the proposed DN-FFOPID controller, the set point tracking is depicted in Fig. 13 for PID, fuzzy PID, FOPID systems and number of experimental validation is performed by changing the set points. The set point tracking for the DN-FFOPID controlling system helps to monitor the liquid level in the presence of the disturbance at Fig. 13. 8 cm is considered to be the initial state of operating range and the proposed DN-FFOPID controller was able to achieve the desired set point and the operating point was changed to 32 cm at time t = 1.3 min.
Set point tracking at the presence of disturbance (a) PID (b) Fuzzy PID (c) FOPID (d) DN-FFOPID controller.
Based on the above results the water level in all the tanks are controlled effectively by using the DN-FFOPID controller.
Table 6 shows the comparative analysis of various controllers with the proposed controller system. Other methods of controlling techniques causes large error values. The proposed DN-FFOPID always minimized the error values with effectively converges to zero successfully. Thus DN-FFOPID systems provide good control quality for the MIMO based non-linear systems even at the presence of noise and the load conditions.
Performance measure in the presence of disturbance
Comparative Analysis of various controllers
This research paper holds the proposed Deep Neural Fuzzy based Fractional Order Proportional Integral Derivative (DN-FFOPID) Controller to control the level of the liquid level in quadruple tank system. The train and to learn the dynamic characteristics of the tank system back propagation by the Deep Neural model is used based on the signal received from the reference signal. The proposed controller eliminates the error to larger extent. Even in the presence of noise and under load situations, DN-FFOPID systems offer MIMO-based non-linear systems good control quality. The rise time is about 2.72 sec, settling time 1.02 sec and 0% overshoot. To effectively demonstrate the control performance, the simulation and real time controlling system for the PID, Fuzzy PID, FOPID systems along with the proposed DN-FFOPID was also carried out. Experimental results shows that the proposed controller gives much better performance with no overshoot or undershoot. The future scope can be made with the online adjustment of the tank system to learn the coefficient learning rate inorder to ensure that the weight converges to the correct values.