
Abstract
The reptile search algorithm (RSA) is a dynamic and effective meta-heuristic algorithm inspired by the behavior of crocodiles in nature and the way of hunting prey. Unlike other crawler search algorithms, it uses four novel mechanisms to update the location of the solutions, such as walking at high or on the belly, and hunting in a coordinated or cooperative manner. In this algorithm, the total number of iterations is divided into four intervals, and different position-updating strategies are used to make the algorithm easily fall into the local optimum. Therefore, an improved reptile search algorithm based on a mathematical optimization accelerator (MOA) and elementary functions is proposed to improve its search efficiency and make it not easily fall into local optimum. MOA was used to realize the switching of RSA’s four searching modes by introducing random perturbations of six elementary functions (sine function, cosine function, tangent function, arccosine function, hyperbolic secant function and hyperbolic cosecant function), four mechanisms are distinguished by random number instead of the original RSA algorithm’s inherent four mechanisms by iteration number, which increases the randomness of the algorithm and avoids falling into local optimum. The random perturbations generated by elementary functions are added to the variation trend of parameter MOA to improve the optimization accuracy of the algorithm. To verify the effectiveness of the proposed algorithm, 30 benchmark functions in CEC2017 were used for carrying out simulation experiments, and the optimization performance was compared with BAT, PSO, ChOA, MRA and SSA. Finally, two practical engineering design problems are optimized. Simulation results show that the proposed sechRSA has strong global optimization ability.
Keywords
Introduction
In nature, predators must choose a robust method to maximize prey capture [1]. Generally speaking, the foraging activity of various animals in nature is a random walk, the following location depends on the current location randomly, and the likelihood of change at the next position can be expressed mathematically as an optimization technique [2]. There are two main types of optimization techniques. (1) Deterministic methods, are divided into linear and nonlinear methods [3]. (2) Stochastic method. The most commonly used method is deterministic, which explores the search space and finds the optimal solution by using the problem’s gradient erudite [4]. Although they are helpful for linear searching problems (unimodal), they tend to get stuck in local optima for nonlinear search problems (multimodal). To solve this problem, different initial population strategies, hybridization or modification algorithms can be used [5]. The stochastic approach is to generate and utilize random variables, such as a meta-heuristic optimization algorithm. These optimization algorithms are used to conduct a global search in the available search space of the problem to obtain a near-optimal solution [6]. In recent decades, meta-heuristic algorithms have been successfully applied to solve various complex optimization problems [7]. Exploration and exploitation search strategies are the two main advantages of meta-heuristics. Exploration search can ensure the universality and effectiveness of the algorithm in a given search space, and the exploitation search finds the best candidate solution according to the obtained optimal solution. The primary purpose of introducing advanced meta-heuristic algorithms is to solve complex optimization problems faster and get more robust optimization methods [8]. Rat Swarm Optimization algorithm (RSO) [9], Black Widow Optimization algorithm (BWO) [10], Equilibrium Optimizer (EO) [11] and Arithmetic Optimization algorithm (AOA) [12] are some standard meta-heuristic optimization algorithms. Meta-heuristic algorithms are mainly divided into three categories [13]. (1) Algorithm based on evolution [14]. The most commonly used is the genetic algorithm (GA) [15], which uses crossover and mutation operators to generate improved solutions, and differential evolution (DE) [16]. (2) Algorithm based on swarm intelligence to simulate the social behavior of an animal swarm, whose main feature is to share the joint information of all animals through an optimization process [17]. (3) Human-based algorithm [18] driven by human communication and community behavior to produce better solutions until meeting the final criteria, which include the Imperialist Competition Algorithm (ICA) [19], Teaching-learning based optimization algorithm (TLBO) [20]. Among them, the swarm intelligence optimization algorithm (SIA) has attracted the interest of many researchers in various fields. Bonabeau defined SIA as “emergent collective intelligence of simple agent populations” [21]. In the biological world, an optimization algorithm is obtained by simulating the thought and system of swarm activities of a certain kind of organism as a whole [22]. Although each swarm intelligence optimization algorithm has common properties, different biological groups have unique living habits, so there are significant differences in solving various optimization problems.
Swarm intelligence optimization algorithms can be divided into four categories according to different disciplines. (1) Biological intelligence algorithm. Thousands of other creatures have been created by the vicissitudes of nature. Biological intelligence algorithms are established to simulate the living habits and behavior of biological groups, such as the Black Widow Optimization Algorithm (BWO) based on the mating behavior of black widow spiders [10], the Mayfly Optimization Algorithm (MA) inspired by the flight behavior of the mayfly and its mating process [23]. (2) Physical intelligence algorithm. The candidate solutions are defined mainly based on the law of physical method, which is analogous to a certain physical phenomenon in nature, such as the Henry Gas Solubility Optimization algorithm (HGSO) based on Henry’s law to simulate the change process of gas solubility in solution with temperature [24] and Black Hole algorithm (BH) according to the black hole phenomena [25]. (3) Geographic intelligence algorithm derived from bio-geographic theory. (4) Chemical intelligence algorithm to simulate the phenomenon of a chemical reaction. In addition, These different meta-heuristics have been widely used in various fields to solve other problems, such as image segmentation [26], economic emission scheduling [27], feature selection [28], image classification [29], etc.
The application of elementary functions in swarm intelligence optimization algorithms has also appeared recently. Elementary functions are the most common function in mathematics, including power function, constant function, logarithm function, exponential function, trigonometric function and composition function. Scholars adopt the random perturbation property of elementary functions and add them to the optimization algorithms to improve their optimization performance. Hao et al. added the random disturbances generated by six elementary functions to the two parameters of MOA and MOP in the arithmetic optimization algorithm (AOA) to improve its convergence speed [30]. Devan et al. added trigonometric functions and a sinusoidal cosine operators to AOA in order to improve its optimization performance and accuracy [31]. Liu et al. used the Halton sequence to initialize the individual position, introduced an adaptive grouping strategy and used teaching and learning optimization strategy, elite reverse learning strategy and oscillatory perturbation operator to update the position of each group of individuals respectively, which can improve the search ability of AOA, reduce the impact of local extreme points on the algorithm, and improve its diversity at the initial stage of iteration [32].
The reptile search algorithm (RSA) is a meta-heuristic optimization algorithm based on natural inspiration. It mainly builds a mathematical model based on the predation behavior of crocodiles. This gives rise to four novel mechanisms for RSA to update the position of the solutions. High-walking or belly walking is used for rounding, and hunting cooperation or hunting coordination is used for hunting. Although RSA has a strong searching ability, the total number of iterations is divided into four intervals. A fixed search mechanism is adopted in these four intervals, making it easy to fall into the local optimum. So this paper proposes an improved RSA based on mathematical optimization accelerator (MOA) and elementary functions. Firstly, RSA divides the total number of iterations into four parts, which correspond to four search mechanisms in order (global search for high-altitude walking and abdominal walking, local search for hunting coordination and hunting cooperation). The evolution process executes these four search mechanisms in order through the number of iterations, as shown in Fig. 2. The proposed improved RSA adopts the mathematical optimization accelerator (MOA) to compare with the random number r1 to redefine the global search and local search of RSA. When the random number r1 is greater than MOA, the algorithm executes the global search phase. By comparing the random number r2 and 0.5 in the global search phase, the dynamic execution of high-altitude walking and abdominal walking is performed. When the random number r1 is smaller than MOA, the algorithm executes the local search phase. In the local search stage, a random number r3 is added to be compared with 0.5 to dynamically perform hunting coordination and hunting cooperation. As shown in Fig. 2, the above improved RSA can increase its randomness and avoid it falling into local optimum. Then, the random perturbations with six elementary functions (sine function, cosine function, tangent function, inverse cosine function, hyperbolic secant function, and hyperbolic cosant function) were added on the monotonic upward trend of the parameter MOA. The hyperbolic secant function has the smallest oscillation amplitude, which can clearly distinguish the global search stage from the local search stage, and can dynamically execute four mechanisms. The above improvements can improve the optimization accuracy of RSA. Then the CEC2017 test functions are used to test the performance of the original RSA and the improved algorithms. Finally, two practical engineering problems (three-bar truss design problem and welded beam design problem) are applied to verify the effectiveness of the improved RSA. The overall arrangement of the paper is described as follows. The second section introduces RSA, the third section introduces the improved RSA, the fourth section illustrates the simulation experiments and results analysis, and the fifth section draws the conclusion.
Reptile search algorithm
The reptile search algorithm (RSA) is inspired by how crocodiles walk and hunt their prey in nature. Crocodiles are giant semi-terrestrial and semi-aquatic reptiles. Because of their streamlined bodies, they reduce the resistance of air and water, which allows them to move quickly over land. By keeping their legs under their bodies, they use their fins to make quick turns and sudden movements in the water [33]. Crocodiles are also advanced hunters and have the highest intelligence of any animal. They work together to catch their prey, each playing a different role and adjusting each other’s movements depending on the prey they are targeting. This gives rise to four novel mechanisms for the RSA to update the location of the solutions, including the exploration search phase and the exploitation search phase. The exploration search phase is a global search; not easy to approach the target prey, but easier to find the vast search space. It can be divided into high-altitude walking and abdominal walking. High-walking allows crocodiles to make rapid movements and sudden turns, and belly-walking allows crocodiles to pare prey in the water silently. The exploitation search phase is local search, making it easy to access the target prey and arrive at the optimal solution. It can be divided into hunting coordination and hunting cooperation. When hunting coordination occurs, the crocodiles catch the prey, eat the prey on the side and join the hunt. Hunting cooperation is when crocodiles play different roles, giant crocodiles, for example, drive fish from shallow water to deep water, and smaller, smarter crocodiles prevent them from escaping. Figure 1 is a schematic diagram of the search strategy of the RSA.
Search strategy of reptile search algorithm.
In the RSA, the optimization process starts with a set of candidate solutions (X). These candidate solutions are randomly generated, and the best solution obtained is considered to be the near optimal solution in each iteration, which is shown in Equation (1).
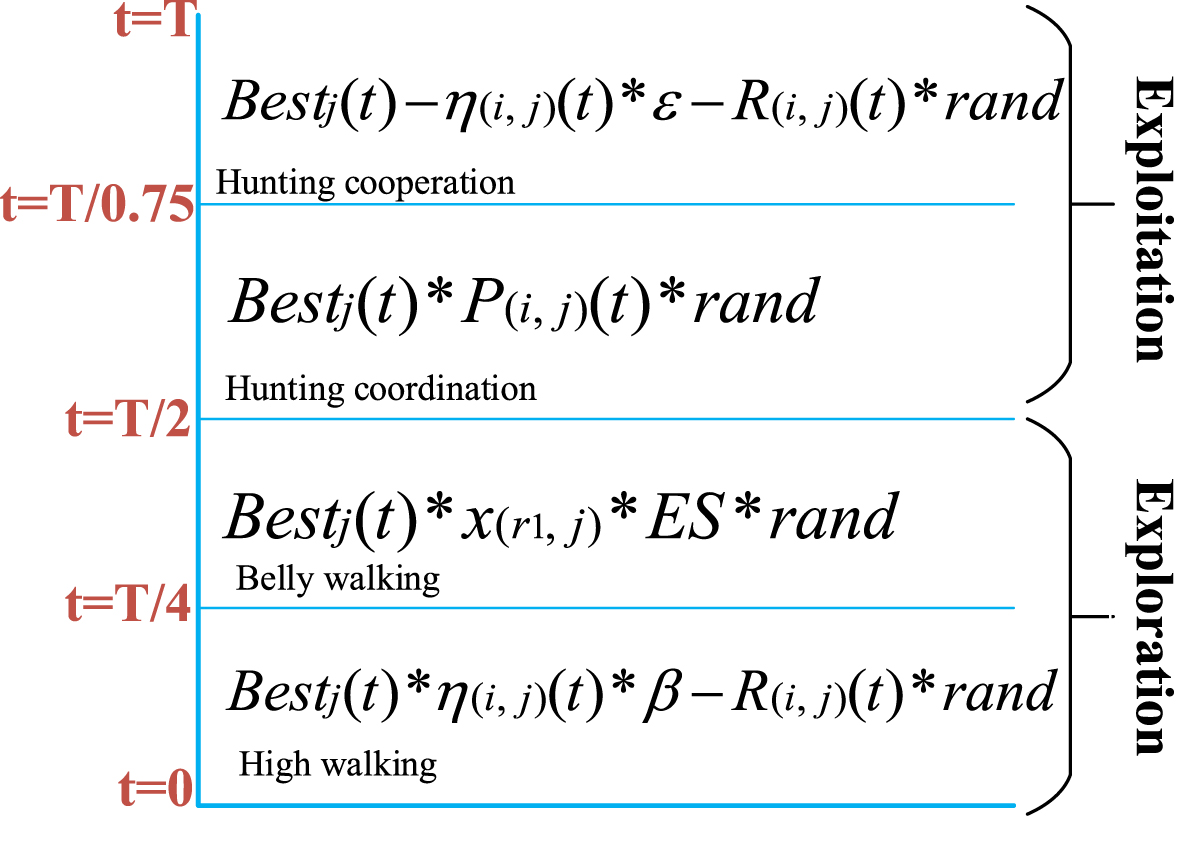
The exploration phase of RSA is also called the encircle phase, which is the global search to find a wide search area. When the crocodile is rounding up its prey, it has two ways of walking in this process: high walking and belly walking. When crocodiles need to make sudden turns and run fast, they keep their legs in a straighter position below their bodies, known as high-walking. This kind of walking style will launch a surprise attack on prey and chase prey quickly in a short period. When crocodiles need to approach their prey quietly, they engage in a belly walk. A creeping approach makes it easier to sneak up on prey in the water and launch a surprise attack. Although these two ways of walking make it difficult for crocodiles to hunt targets successfully, they help to find a wide searching area and find better solutions for the exploitation stage (local search). When t≤T/4, it adopts the high walking strategy. When t≤T/2 and t > T/4, it adopts the belly walking strategy. The position update equation in the exploration stage is shown in Equation (3).
The exploitation phase of RSA is also called the hunting phase, which is a local search to find the optimal solution. Groups of crocodiles approach their target prey and hunt when they get close enough; there are two kinds of hunting in this process: hunting coordination and hunting cooperation. When hunting coordination mechanisms occur, crocodiles group together to attack, and the crocodiles capturing the prey will leave hunting grounds and rejoin the hunting after eating up prey. After finishing hunting, eating prey and resting a period of time, this crocodile is energetic to enter the hunting activities, ensuring the crocodiles’ efficiency from attack and solving the food problem. Hunting cooperation is when crocodiles cooperate, and this stage shows that crocodiles are naturally bright hunters, giant crocodiles. For example, huge crocodiles will drive the fish into shallow water, whereas smaller, more agile crocodiles will wait, move and prevent the fish from escaping and hunting. When t≤T/0.75 and t > T/2, it adopts the hunting coordination mechanisms; When t≤T and t > T/0.75, it adopts the hunting cooperation mechanism. The position update equation in the exploitation stage is shown in Equation (9).
Mathematical Optimization Accelerator (MOA)
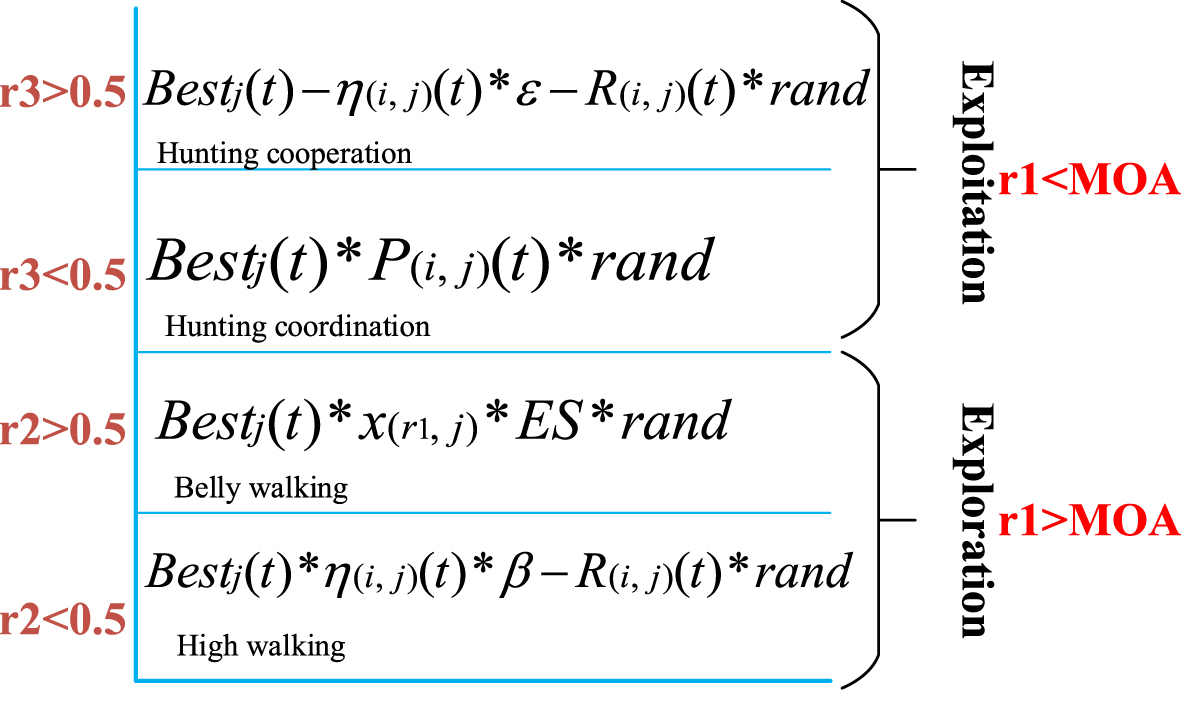
The first innovation of the improved RSA proposed in this paper is the introduction of mathematical optimization accelerator (MOA). The four search mechanisms of the original RSA are executed according to the four intervals divided by the number of iterations, so the algorithm can only be executed in order within one interval without randomness, which will make it easy to fall into local optimization and not very convincing. The mathematical optimization accelerator (MOA) is introduced to replace the original four intervals divided by the total number of iterations; the random number r1 is used to divide the MOA into two intervals, which increases the randomness of the whole algorithm and avoids the disadvantage of falling into local optimum. With the addition of MOA, the entire search phase is controlled by it. The execution condition is that when r1 > MOA, the algorithm carries out the exploration stage, that is, the global search, and discovers a wide search area; In the exploration stage, when r2 < 0.5, it is under high walking, otherwise it is under belly walking. When r1 < MOA, in the exploitation stage of the algorithm, that is, local search, the optimal solution is found; In the exploitation stage, when r3 < 0.5, it is under hunting coordination, otherwise it is under hunting cooperation. The new position updating mode of the improved RSA is calculated by Equations (10) and (11).
Search strategy of improved RSA.

Trend of MOA with iteration times.
The second innovation of the improved RSA proposed in this paper is to add random perturbations of six different elementary functions to the MOA, which increases the randomness of the whole algorithm, avoids the disadvantage of falling into local optimum, and improves its optimization accuracy. The introduced MOA increases with the number of iterations, and its value is minimum in the early stage of iteration and significant in the late stage of iteration. In this paper, the parameters of MOA are changed, and random perturbations generated by six elementary functions are added to the growth process, which will add random disturbance to the original rising trend and make up for the disadvantage of being easy to fall into the local optimum, which balances the exploration and exploitation stages of RSA, speeds up the convergence speed, and improves its performance and convergence accuracy. Figure 4 shows the images of the sine function, cosine function, tangent function, arccosine function, hyperbolic secant function and hyperbolic cosecant function. Figure 5 shows the random fluctuation images generated by MOA superimposed on these functions. The disturbance coefficient k generated by the elementary functions is multiplied by MOA, as shown in Equation (13). Different elementary functions take different values of k, as shown in Table 1.

Six elementary function images.
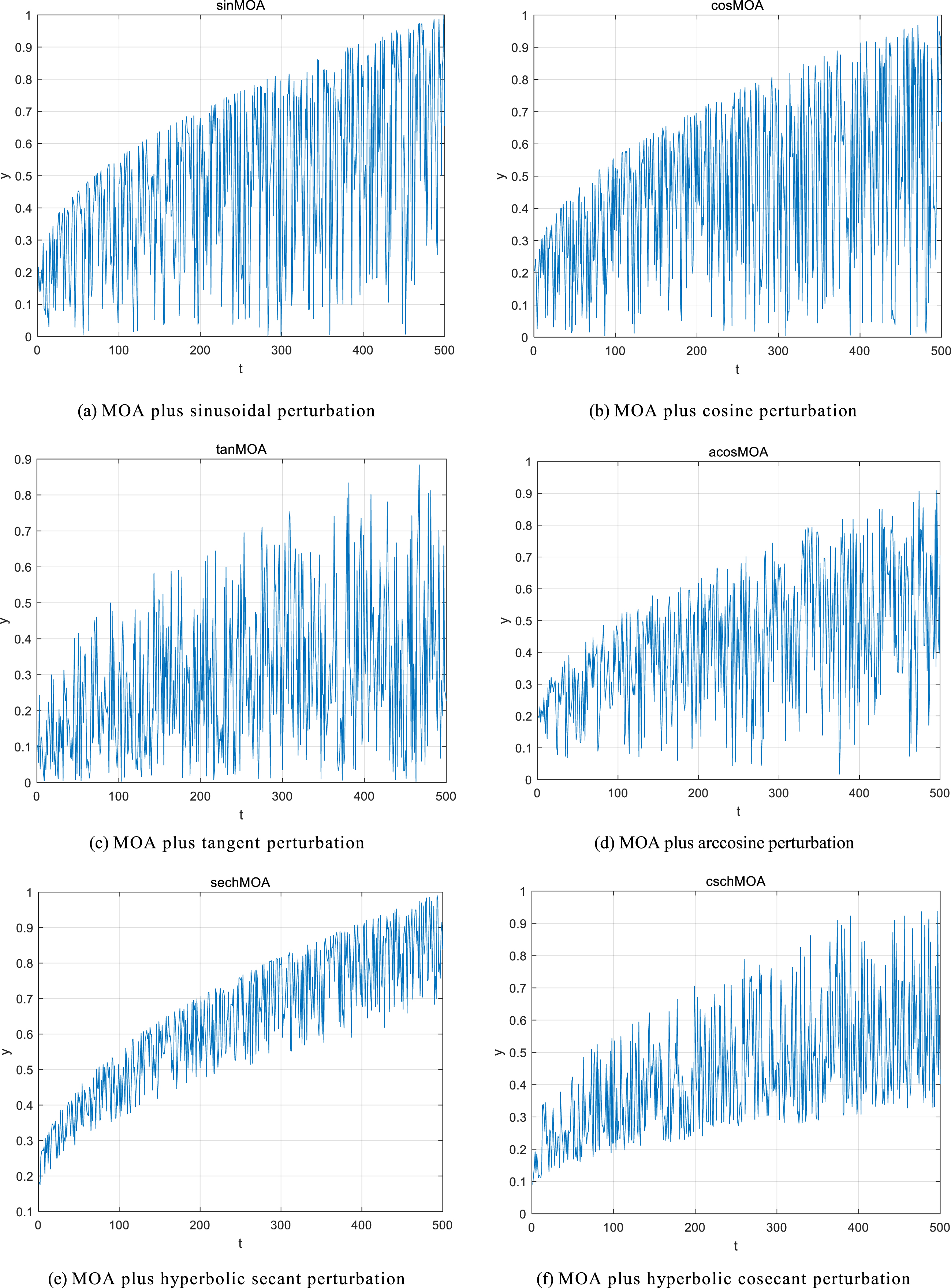
Trend of MOA plus perturbation of elementary functions.
Parameters of six improved RSA
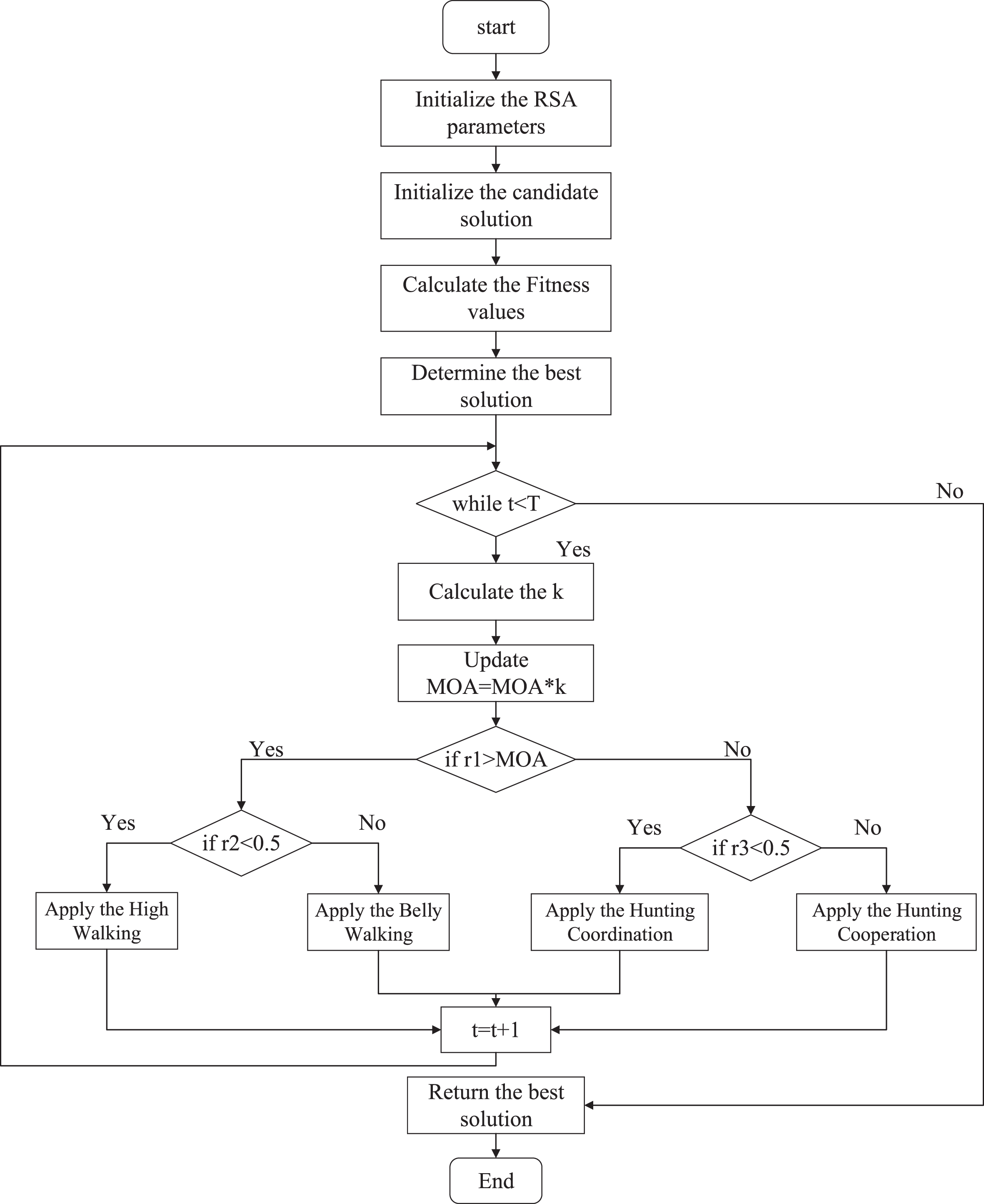
The pseudo-code of the improved RSA is shown as follows. The flow chart of the improved algorithm based on MOA and elementary functions is shown in Fig. 6.
Flow chart of improved RSA based on MOA and elementary functions.
The computational complexity of the improved RSO mainly depends on three factors: the initialization process, the number of fitness evaluation and the update of the solution. It is related to the population size N, the maximum number of iterations T and the dimension D of the parameter in the problem. The complexity of the algorithm is generally calculated according to the number of operations of the statement. For N crocodiles in the improved RSA, the computational complexity of the initialization process is O(N), the computational complexity of calculating the optimal fitness value of individuals is O (N × T), and the computational complexity of the update mechanism for updating all crocodiles positions in the D dimension search space is O (N × T × D). Therefore, the computational complexity of the improved RSA is calculated by O (N) + O (N × T) + O (N × T × D) = O (N (1 + T + T × D)).
Simulation experiment and results analysis
To verify the optimization performance of the improved RSA based on MOA and elementary functions, 30 test functions of CEC2017 were selected for carrying out a comparison. Each group of experiments was independently run for 30 times and the average value was taken, and the maximum number of iterations was 500 with a population of 30. In order to further illustrate the effectiveness of the improved algorithms, function optimizations were compared with Particle Swarm Optimization (PSO) [34], Chimpanzee Optimization Algorithm (ChOA) [35], Mud Ring Algorithm (MRA) [36], Bat Algorithm (BA) [37] and Squirrel Search Algorithm (SSA) [38], where each group of experiments was independently run for 30 times and the average value was taken, and the maximum number of iterations was 500 with a population of 30. Two practical engineering optimization problems were also used to find the optimal solution, and the effectiveness of the improved RSA based on MOA and elementary functions was verified.
Test functions
In this paper, 30 test functions in CEC2017 are selected for testing. The expressions for the 30 test functions are shown in Table 2. F1∼F3 are unimodal functions; that is, there is only one global optimal solution in the solution space of the functions, which is used to test the search accuracy and convergence rate of the algorithms. F4∼F10 are multimodal functions; that is, there are multiple local optimal values, and the algorithm is easy to fall into the local optimum. The test results of multi-modal functions can well illustrate the function optimization ability. F11∼F20 are adaptive dimension functions, and F21∼F30 are composite functions. These various functions can well show the performance of the algorithms. The improved RSA with MOA is denoted as RSA1, the improved RSA by adding sine function, cosine function, tangent function, arccosine function, hyperbolic secant function and hyperbolic cosecant function are denoted as sinRSA, cosRSA, tanRSA, acosRSA, sechRSA, cschRSA, respectively.
Properties and summary of the CEC2017 test functions
Properties and summary of the CEC2017 test functions
For CEC2017 test functions, all test functions’ dimension is 10, and the range is [-100,100]. In order to better analyze the experimental results, each algorithm was run 30 times to take the average, the maximum number of iterations was 500, and the population number was 30. The convergence curves of the function optimization are shown in Fig. 7 under the original RSA, RSA based on MOA, RSA based on MOA and elementary functions. The mathematical statistics are carried out to facilitate comparison with the result of the simulation experiments, which is mainly in the form of mean and standard deviation to be conducive to the analysis of experimental results. The results of the obtained optimal value, mean value and variance are shown in Table 3.

Convergence curves on optimization functions.
Performance comparison results of CEC-2017 function optimization
It can be clearly seen from Fig. 7 and Table 3 that, for most test functions, the convergence effect and average best fitness value of the improved RSA are better than RSA. Among them, the average optimization values on F2, F3, F5, F16, F25, F27 and F28 under sechRSA are the smallest; the average optimization values on F4, F9, F10, F20 and F21 under cosRSA are the smallest; the average optimization values on F12, F19, F26, F29 under sinRSA are the smallest; the average optimization values on F11, F13 and F24 under tanRSA are the smallest; the average optimization values on F8 and F22 under acosRSA are the smallest; the average optimization value on F17 under RSA1 is the smallest; the average optimization value on F1 under cschRSA is the smallest. From the standard deviation, the standard deviation values on F1, F2, F3, F11 and F16 under sechRSA are the smallest; the standard deviation values on F12, F19, F29 and F30 under cosRSA are the smallest; the standard deviation value on F17 under sinRSA is the smallest; the standard deviation values on F5, F8, F25 and F26 under tanRSA are the smallest; the standard deviation values on F4, F6, F14, F20 and F27 under acosRSA are the smallest; the standard deviation value on F28 under cschRSA is the smallest. From the optimal values, sinRSA obtains the optimal values on F2, F5, F6, F9, F16, F19, F21, F29 and F18; RSA1 obtains the optimal values on F3, F4, F10, F13, F17, F24 and F27; tanRSA obtains the optimal values on F1, F11, F12 and F23; acosRSA obtains the optimal values on F7, F15, F22 and F26; cschRSA obtains the optimal values on F8, F14, F25 and F28.
Seen from Fig. 3, it can be seen that original MOA monotonically increases with the number of iterations. Adding random perturbation with elementary functions makes MOA oscillates and increases with the number of iterations shown in Fig. 7, which increases the randomness of RSA. Among six disturbances, the oscillation amplitude of the hyperbolic secant function is the smallest, which not only clearly distinguishes the global search and local search of RSA, but also dynamically selects the searching mechanisms between the global and local stages so as to increase the local search ability and avoid it falling into the local optimum. On the other hand, most of other improved algorithms are also superior to RSA and improves its the search performance.
Figure 8 shows the comparative convergence curves of sechRSA, acosRSA, PSO [34], ChOA [35], MRA [36], BA [37] and SSA [38]. Table 4 shows their optimal values, mean values and standard deviations. Each algorithm was run 30 times to take the average, the maximum number of iterations was 500, and the population number was 30.

Convergence curves of optimization functions.
Performance comparison results of CEC-2017 function optimization
As seen from the optimization results in Table 4, for the average value of most functions, the optimization results obtained by the improved RSA based on MOA and elementary functions are closer to the optimal values. The average values on F1, F2, F4, F7, F8, F9, F17, F20, F24, F26 under sechRSA are the minimum compared with other algorithms. The standard deviation obtained by sechRSA on function F1, F2, F6, F24 and F26 was lower than that of other algorithms, and sechRSA obtains the optimal values on F3, F6, F7, F8, F9, F10, F16 and F30. The optimal values of the functions F1, F2, F5, F17, F18, F20, F25 and F27 under acosRSA are the minimum compared with other algorithms; and the standard deviation results of acosRSA on functions F11, F19, F27 and F29 are lower than those of other algorithms; the average values on F5, F6, F12, F13, F16, F19, F25 under acosRSA are the minimum compared with other algorithms.
It can be seen that the optimization effect of the improved RSA based on the MOA and elementary functions is quite obvious. After adding the mathematical optimization accelerator, RSA expands the global searching range. On this basis, by introducing the oscillation perturbation of the hyperbolic secant function, RSA can dynamically adjust the individual position with the iteration number, which is characterized by randomness, better performance and more feasibility than other comparative swarm intelligent optimization algorithms.
In order to verify the proposed improved RSA based on MOA and elementary functions, the following two practical engineering problems are solved, whose mathematical models are composed of multiple inequality constrained and single objective function. Among them, according to the characteristics of constraint conditions, penalty functions are used to deal with constraints, that is, a penalty function proportional to the degree of constraint violation is added to the objective function, and the solution that does not meet the constraint is eliminated to obtain the optimal solution. However, this paper does not focus on the penalty function, which will not be described in detail in the following optimization problems. To be fair, the experiment was run 10 times and averaged, sechRSA and other improved algorithms are compared with the optimal values of these functions under inequality constraints, and their optimal values, mean values and standard deviations are compared at the same time under other algorithms in RSA [33] with the proposed sechRSA.
Three-bar truss design problem
The three-bar truss design problem’s main goal is to minimize the weight of the structure while supporting the total vertical downward load P. The design problem can be described as finding two design variables (the cross-sectional area of bar 1 (X1) and the cross-sectional area of bar 2 (X2) that satisfy stress, deflection and buckling constraints and boundary conditions constraints to make the structure weight of the three-bar truss minimized. The model diagram of the design problem is shown in Fig. 9; the objective function and constraints are as follows.
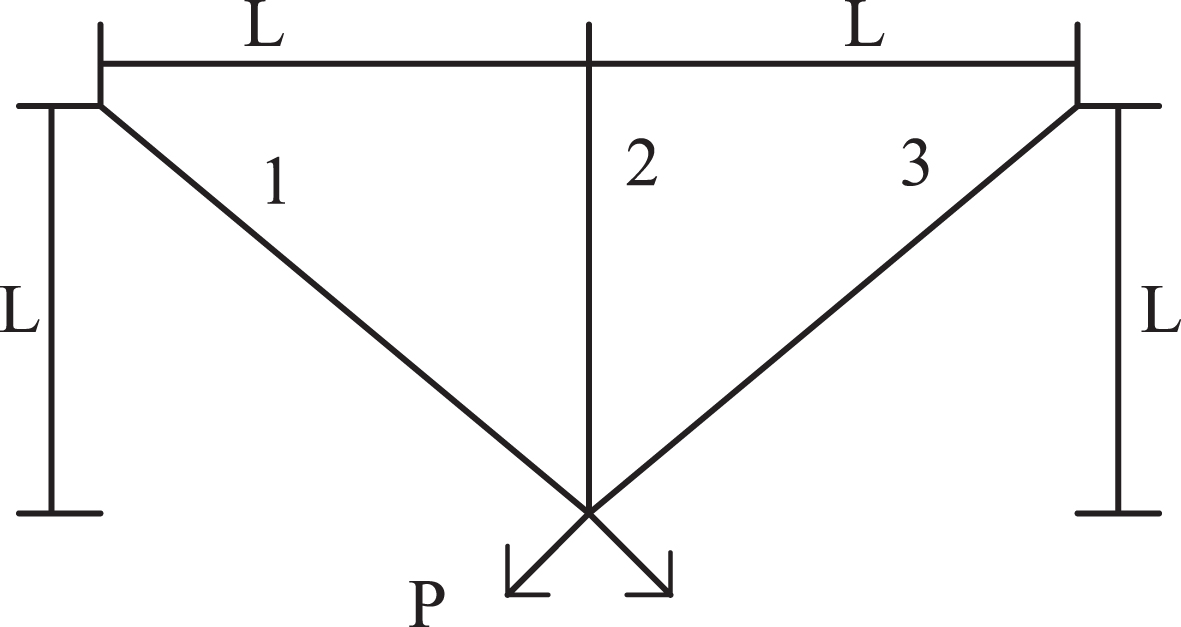
Model diagram of three-bar truss.
The objective function:
The constraints:
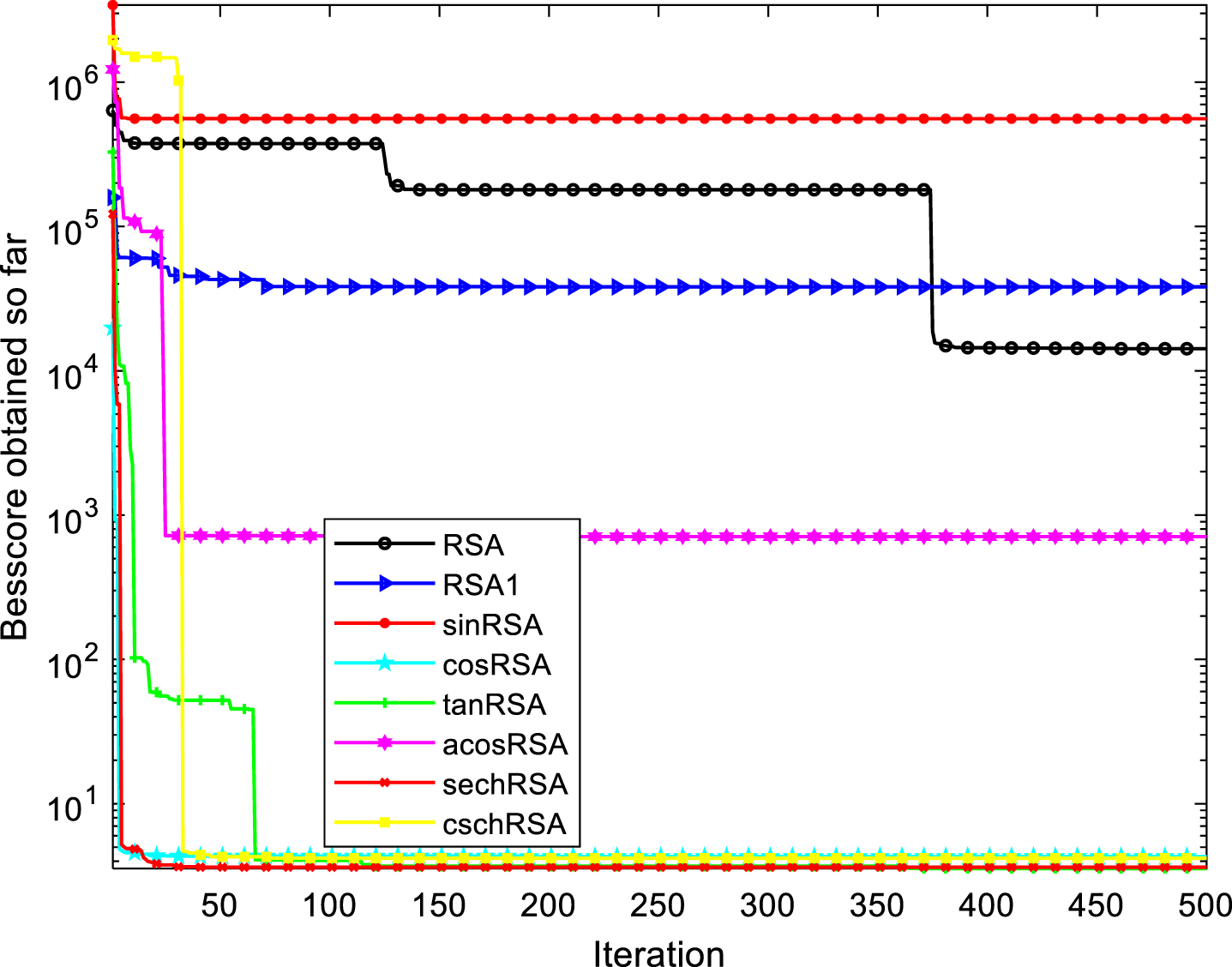
Figure 10 shows the convergence curves of the RSA and the improved RSA based on mathematical optimization accelerator and elementary functions to optimize the three-bar truss design problem. The experimental results of the optimal solution to the three-bar truss design problem are shown in Table 5. Table 7 shows the comparison of the optimal solutions of the improved sechRSA, SSA [38], PSO [39], CS [40], GOA [41] and AAA [42] for the three-bar truss design problem [33]. In order to facilitate the comparison of the performance of the improved algorithms, the maximum number of iterations of each algorithm was set to 500 generations. The optimal value, average value and standard deviations of 10 experiments were recorded in Table 6, and the best experimental data obtained in the tables were bolded. It can be seen from Table 6 that the sinRSA optimized the three-bar truss design problem and obtained the optimal value, followed by the tanRSA. Seen from the results of average and standard deviations, it can be seen that sechRSA obtains the best solution on the three-bar truss. Table 7 shows the comparison of the optimal solutions for the three-bar truss design problem under sechRSA, SSA, PSO, CS, GOA and AAA. It can be concluded that the sechRSA has the smallest weight, so it is the best scheme.

Convergence curves of improved algorithms to optimize the three-bar truss.
The best solution obtained from improved algorithms for the three-bar truss design problem
The results obtained from improved algorithms for the three-bar truss design problem
The best solution obtained from other algorithms and improved algorithms for the three-bar truss design problem
The welded beam design problem is to minimize the total manufacturing cost. The design problem can be described as finding a satisfying deflection (δ), shear stress (τ), bending load of beam and strip (P c ) and bending stress (σ), and boundary conditions are constrained by four design variables: weld thickness (X1), length of the attached part of beam and strip (X2), beam height (X3) and beam thickness (X4). Then the cost of fabrication of welded beams is minimized. The model diagram of this design problem is shown in Fig. 11, and the objective function and constraints are illustrated as follows.
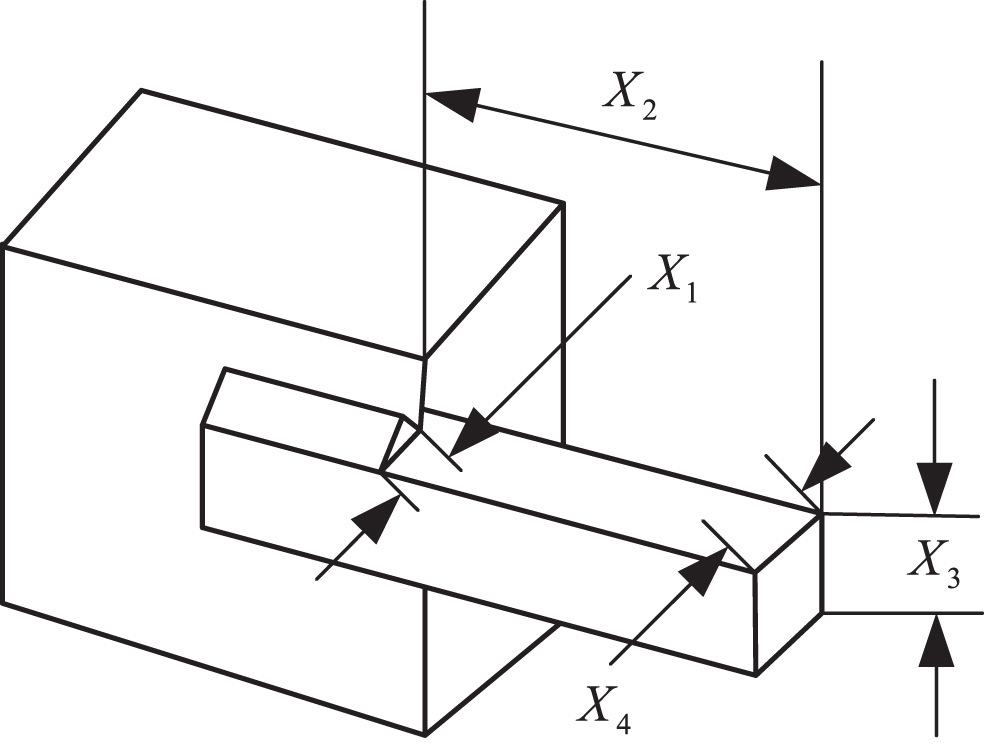
Model diagram of welded beam.
The objective function:
Figure 12 shows the convergence curves of the RSA and the improved RSA based on mathematical optimization accelerator and elementary function to optimize the welded beam design problem. The experimental results of the optimal solution of the welding beam design problem are shown in Table 8. Table 10 shows the comparison of the optimal solutions of the welded beam design problem [33] under improved sechRSA, GA [15], DAVID [43], SIMPLEX [43], APPROX [43] and HS [44].
Convergence curves of the improved algorithms to optimize the welded beam problem.
The best solution obtained from improved algorithms for the welded beam problem
In order to facilitate the comparison of their performance, the maximum number of iterations of each algorithm was set to 500 generations. The optimal value, average value and variance of 10 experiments were recorded in Table 9, and the best experimental data obtained in the tables were bolded. It can be seen from Table 9 that tanRSA to optimize the three-bar truss design problem obtained the optimal value, followed by RSA1. According to the results of mean and standard deviations, sechRSA to optimize the three-bar truss has the best performance. Table 10 shows the comparison of the optimal solutions of the welded beam design problem under sechRSA, GA, DAVID, SIMPLEX, APPROX and HS. It can be concluded that the sechRSA has the smallest weight, so it is the best scheme.
The results obtained from improved algorithms for the welded beam problem
The best solution obtained from other algorithms and improved algorithms for the welded beam problem
Because RSA is easily plunged into local optimum and its accuracy is not high, the improved RSA based on mathematical optimization accelerator and elementary functions was proposed to balance the exploration and exploitation ability, which can well solve the shortcomings of local optimization and improve the precision of search advantage and optimization. The optimization results on CEC2017 benchmark functions are compared. The experimental results on the unimodal functions, multimodal functions, multi-dimensional functions, mixed functions and complex functions show that the optimization effect of the proposed RSA based on MOA and elementary functions has the best optimization performance. The optimization results show that for most optimization functions, the average value of sechRSA is the best. By further comparing the optimal sorting of different improved algorithms, sechRSA has achieved the best results. On the other hand, for practical engineering optimization problems, the convergence of the improved RSA is also relatively better. Among them, the minimum average value and the minimum standard deviation of sechRSA in the optimization of three-bar truss and welding beam design problems are 2.6632e+03 and 0.6886, respectively, and sinRSA is with the optimal value of 264.3544. According to the experimental data of three-bar truss and welded beam design problems, sechRSA can find better solutions than other algorithms. The limitation of the improved algorithm in this paper is that it can not optimize discrete engineering problems, such as the optimization of gear transmission and so on.
In future work, we intend to use the perturbation of elementary functions in different optimization algorithms. Secondly, it will also expand the application of the improved RSA, such as feature selection and deep learning. Finally, we will solve multi-objective optimization problems under the improved RSA by designing the adaptive penalty functions.
Footnotes
Acknowledgment
This work was supported by the Basic Scientific Research Project of Institution of Higher Learning of Liaoning Province (Grant No. LJKZ0293 and LJKZ0307), and the Postgraduate Education Reform Project of Liaoning Province (Grant No. LNYJG2022137).