
Abstract
This paper focuses on simplifying the structure of fuzzy systems and improving the precision. By regarding the fuzzy rule base as a mapping from the vague partition on the input universe to the vague partition on the output universe, we first design a new type of fuzzy system using the complete and continuous fuzzy rule base in terms of vague partitions. We then exploit Weierstrass’s approximation theorem to show that this new type of fuzzy system can approximate any real continuous function on a closed interval to arbitrary accuracy and provide the corresponding approximation accuracy with respect to infinite norms. We also provide two numerical examples to illustrate the effectiveness of this new type of fuzzy system. Both theoretical and numerical results show that this new type of fuzzy system achieves the quite approximation effect with a few fuzzy rules.
Introduction
Fuzzy systems have been a significant field in the application of fuzzy set theory since Zadeh [1] first proposed fuzzy sets in 1965. In the past decades, the study of fuzzy systems mainly included how to design fuzzy systems and analyze the approximation ability of the designed fuzzy systems.
When designing fuzzy systems, the construction of membership functions is fundamental work. The appropriate selection or construction of membership functions plays a vital role in ensuring the system’s capability. Therefore, many scholars have studied the influence of different membership functions on the approximation ability of fuzzy systems. Zeng and Singh [12, 23] studied the approximation properties of fuzzy systems derived from fuzzy sets with triangular and trapezoidal membership functions, including uniform approximation and universal approximation. Chen and Gang [18] proposed the fuzzy system based on fuzzy sets with cosine and quadratic polynomial membership functions, and discussed the universal approximation and approximation accuracy. Yuan et al. [19] developed fuzzy systems based on parameter singleton fuzzifier methods. The fuzzy systems have been proven to equip with first-order and second-order accuracy. Sadjadi et al. [20, 21] proposed smooth fuzzy models, and discussed the accuracy of fuzzy models based on smooth functions. Jiang and Yuan [11] proposed a new kind of fuzzy systems derived from pyramid membership functions, and discussed its approximation properties. The above research mainly focuses on the approximation properties of those fuzzy systems derived from fuzzy sets with specific types of membership functions. Therefore, the systematic study of fuzzy systems based on fuzzy sets with different types of fuzzy membership functions is one of the motivations of this paper.
The approximation properties of fuzzy systems, which contain universal approximation property and approximation precision, are the theoretical basis for applying fuzzy systems. Wang [16] and Kosko [22] proved that fuzzy systems can be universal approximators through Stone-Weierstrass Theorem [17]. Theoretically, a continuous function on a closed interval could be approximated by a fuzzy system with any precision, which explains the fuzzy controller’s ability to achieve satisfactory performance in application. However, a closer examination of these results reveals that not being the case, and in fact, there is a gap between the theoretical results and the reported applications. The gap has to do with the fact that often in applications a small number of fuzzy rules are used. On the other hand, the reported results on function approximation may require a large number of fuzzy rules [2, 3]. To simplify the fuzzy rule base, Song et al. [4] reduced the number of fuzzy rules by using iterative parameter adaptation techniques. Yen and Wang [5] applied orthogonal transformation methods to simplify fuzzy rule-based systems. The method of fuzzy similarity is used in [6] and [7] to leave out the redundant fuzzy rules. Chen and Saif [8] gave a fuzzy system equipped with a dynamic rule base that performs well in a few fuzzy rules. Jiang and Yuan [10] proposed the cone fuzzy sets and applied them to construct fuzzy systems so that the structure of fuzzy systems is simplified. In fact, if a large number of fuzzy rules are already known, we can use interpolation or other numerical methods to obtain the approximate of the function without resorting to the fuzzy system. Therefore, fuzzy systems using a small number of fuzzy rules to achieve the desired result on function approximation is another motivation for this paper.
The important difference between our fuzzy system and the existing fuzzy systems is that our proposed fuzzy systems can process information by using fuzzy rule base directly. Therefore, the new fuzzy system weakens the subjectivity caused by fuzzification, defuzzification and fuzzy reasoning methods selection to a certain extent. For this reason, we need to make vague partitions for the input and output universes. Up to now, there have existed many vague partition methods [13, 25–29]. We choose the method mentioned in [13, 14]. One of the reasons is that, based on this method, Pan and Xu proposed an axiomatic system to govern membership degrees, and then introduced the axiomatic definition of fuzzy sets derived from vague partitions. Axiomatic fuzzy sets provide an effective mathematical tool for understanding and describing fuzzy phenomena. Another reason is that the fuzzy rule base is complete and continuous based on vague partitions. Then the fuzzy rule base can be viewed as a mapping between two vague partitions. Consequently, the mapping from the input universe to the output universe can be obtained by mapping between two vague partitions. Our key contributions are stated in this article as mentioned below: As the theoretical basis of the new fuzzy system, some properties of regular vague partitions are investigated, and five typical vague partitions are presented. A new type of fuzzy system is proposed, and the structure of the fuzzy system is simplified. The obtained results from illustrated numerical examples show that the proposed fuzzy system based on five typical vague partitions could perform better with a few fuzzy rules than other fuzzy systems.
The rest of this article is organized as follows: Several concepts related to this article are recalled and some new insights are given in section 2, In section 3, some mathematical properties of vague partitions are investigated, and we give five typical vague partitions. In section 4, the construction process of the new fuzzy system is displayed, and its approximation effect is discussed theoretically. In section 5, two numerical examples are presented illustrating the new fuzzy systems can perform well with a few fuzzy rules. In section 6, we summarize this article and indicate future research direction.
Preliminaries
In this section, unless otherwise stated,
The vague partition and some terminologies
where the degrees of memberships of the point x ∈ U to the class A i is defined by the function μ A i : U → [0, 1] , i = 1, ⋯ , n, respectively, that meet the following conditions:
for any for any for any 0 < μ
A
1
(x) + ⋯ + μ
A
n
(x) ≤1 holds for any x ∈ U.
Based on the vague partition, the redefinition of fuzzy sets is as follows.
if there exists if if if if if A ={ (x, μ
A
(x)) ∣ x ∈ U }, if A = {(x, μ
A
(x)) ∣ x ∈ U},
For
Fuzzy system
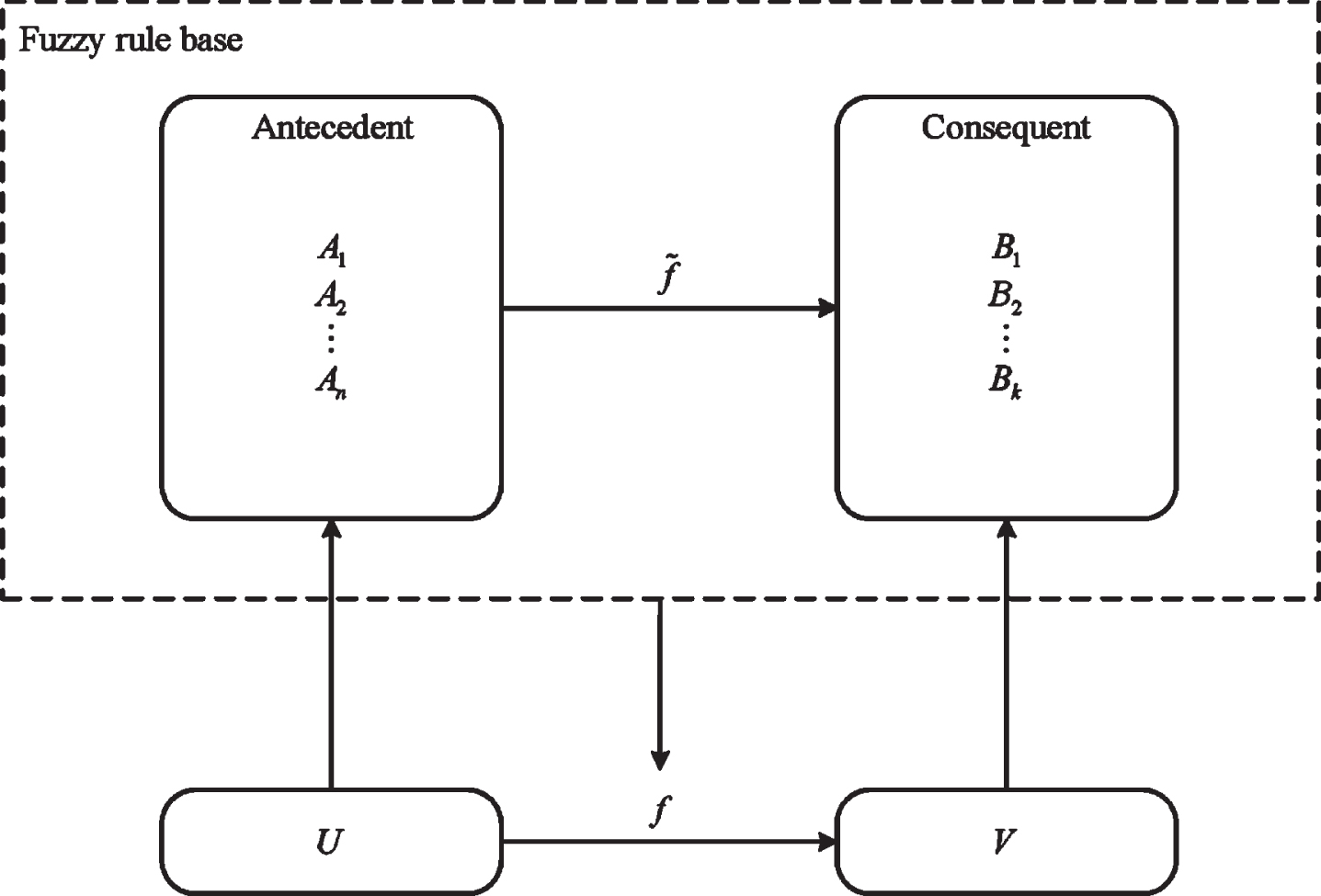
The configurations of the fuzzy system are shown in Fig. 1. The readers can refer to [9, 16] for more on fuzzy systems.
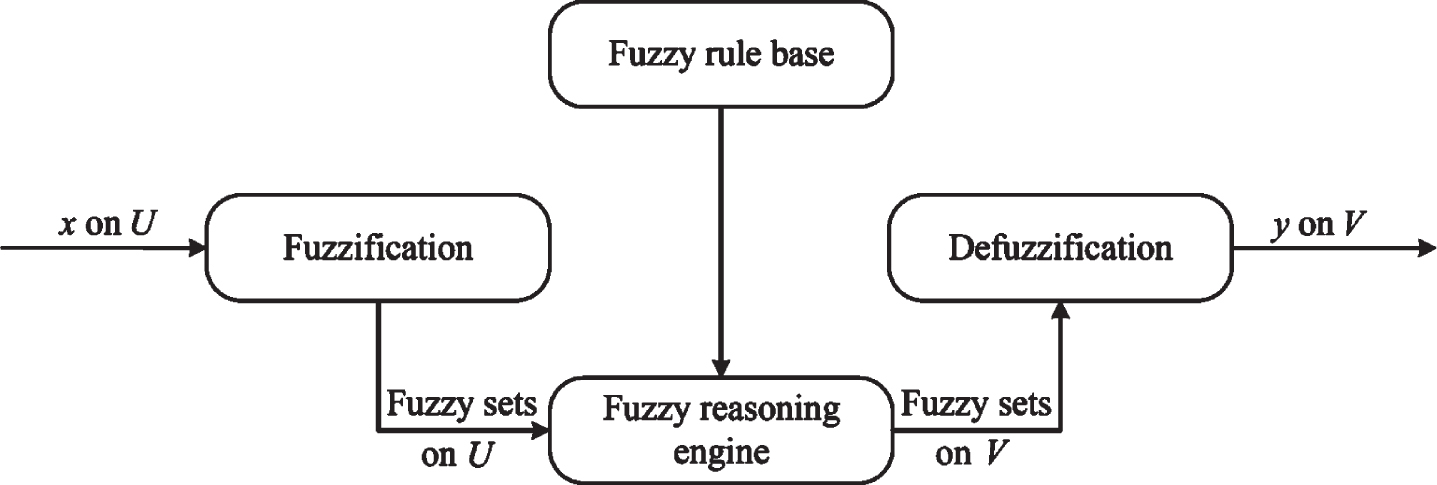
Basic structure of fuzzy systems.
The fuzzy rule base consists of the following rules:
In this section, we add some restrictions to Definition 2.1 and discuss some properties of the vague partition.
for any for any for any 0 < μ
A
1
(x) + ⋯ + μ
A
n
(x) =1 holds for any x ∈ U.
In the sequel, unless otherwise stated, the vague partition
kerA1 = {α} and kerA
n
= {β}, i.e., x1 = α and x
n
=β; suppA
i
∩ suppAi+1 = (x
i
, xi+1); A
i
∩ ⊗Ai+1 ≠ ∅, where ∩⊗ is the maximum triangular norm.
(i) If t1 < t2 ≤ t0, then μ A (pt1 + qt2) ≥ μ A (t1) = min {μ A (t1) , μ A (t2)} since μ A (x) is not decreasing on [t1, t0].
(ii) If t0 ≤ t1 < t2, then μ A (pt1 + qt2) ≥ μ A (t2) = min {μ A (t1) , μ A (t2)} since μ A (x) is not increasing on [t0, t2].
(iii) If t1 < t0 < t2, then μ A (x) is not decreasing on [t1, t0] and not increasing on [t0, t2]. If t1 ≤ pt1 + qt2 ≤ t0, then μ A (pt1 + qt2) ≥ μ A (t1). If t0 < pt1 + qt2 ≤ t2, then μ A (pt1 + qt2) ≥ μ A (t2). Therefore, μ A (pt1 + qt2) ≥ min {μ A (t1) , μ A (t2)}.
Consequently, for p, q ∈ [0, 1] and p + q = 1, we have μ A (pt1 + qt2) ≥ min {μ A (t1) , μ A (t2)}. □
In what follows, the key is to show [A]
λ is a closed interval rather than the union of multiple closed intervals. For each 0 ≤ λ ≤ 1, if t1, t2 ∈ [A]
λ, then μ
A
(t1) ≥ λ and μ
A
(t2) ≥ λ. For any t ∈ [t1, t2], we have
Consequently, [A]
λ is a closed interval on
□
From the above theorem, we denote [A]
λ by
μ
A
i
(x) + μ
A
i+1
(x) =1 for x ∈ (x
i
, xi+1); [A
i
]
λ ∩ [Ai+1]
η
is a point, where λ ∈ [0, 1] and λ + η = 1.
(2) If λ = 1 or λ = 0, then it is obvious. We consider λ ∈ (0, 1). For
Next, we show [A
i
]
λ ∩ [Ai+1] 1-λ is a point rather than a closed interval. From the part (3) of Definition 3.1, there are no other points belonging to
Consequently, [A i ] λ ∩ [Ai+1] 1-λ is a point. □
Then support sets of fuzzy sets in
For the vague partition
From the above statements, the following proposition is obtained immediately.
The above analysis reveals that a vague partition
We introduce five kinds of typical regular single-kernel vague partitions. The membership functions are shown below respectively.
1. Triangular vague partition
2. Sinusoial vague partition
According to practical problems, we can build vague partitions by combining the membership functions in the above five typical fuzzy partitions, called mixed vague partitions. The graphs of the vague partitions mentioned above are shown in Figs. 2–6.
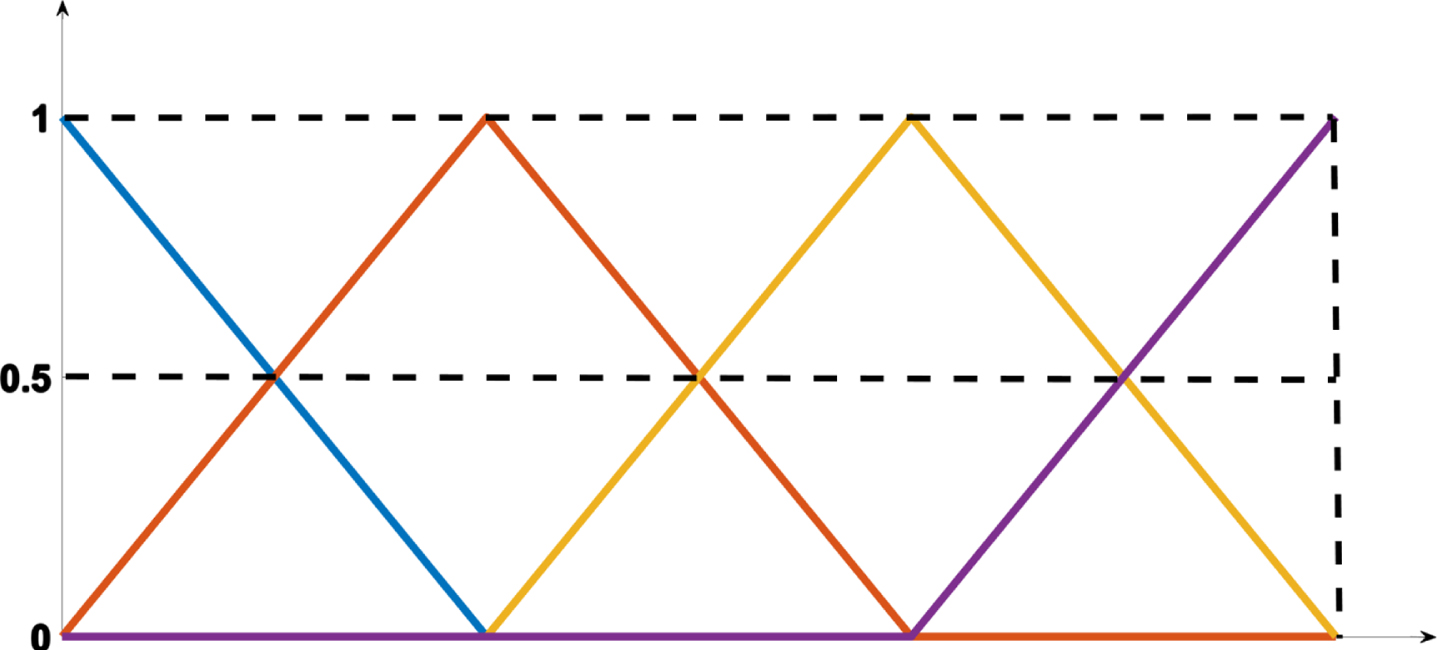
Graph of a triangular vague partition.
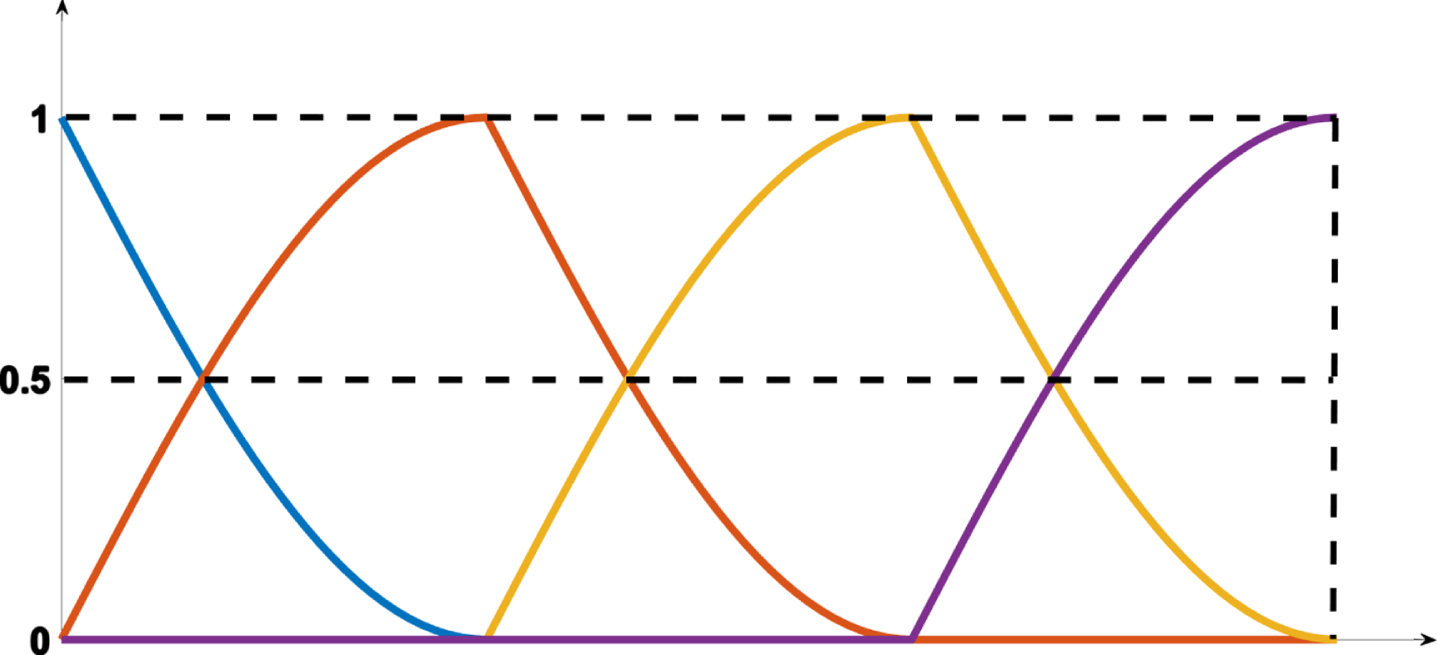
Graph of a sinusoial vague partition.
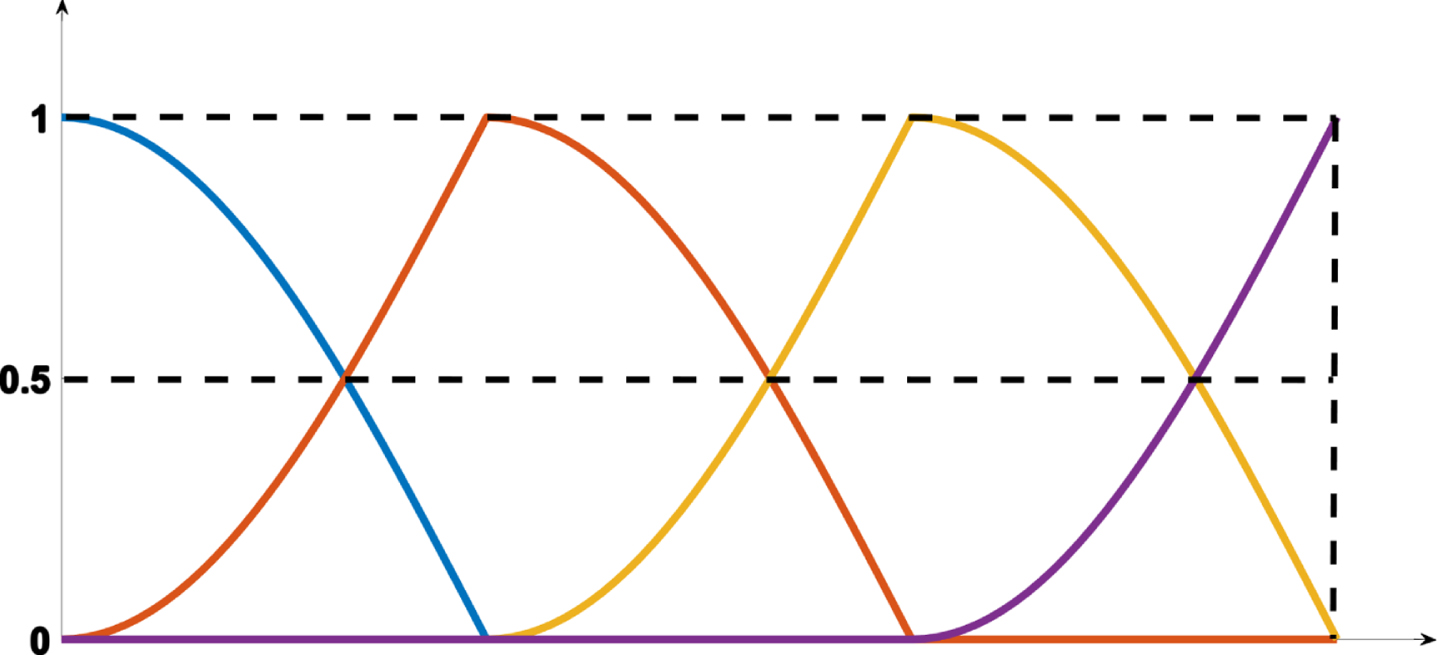
Graph of a cosine vague partition.

Graph of an exponentia vague partition.

Graph of a logarithmic vague partition.
In this section, let
The fuzzy rule base
R i : IF A i THEN B s i ,
where
A complete and consistent fuzzy rule base can be seen as a mapping
□
For the reverse,
Necessity. Since
From case (i), we obtain
Consequently,
□
The preceding theorem indicates that the monotonicity and continuity are equivalent if
Basic configuration of the new fuzzy system
Let
Basic configuration of the new type of fuzzy system.
According to the configuration of the new fuzzy system as displayed in Fig. 8, let kerA
i
= {x
i
}, x
i
∈ U,
Taking triangular vague partitions as an example, the above algorithm is displayed schematically in Fig. 7a and Fig. 7b.
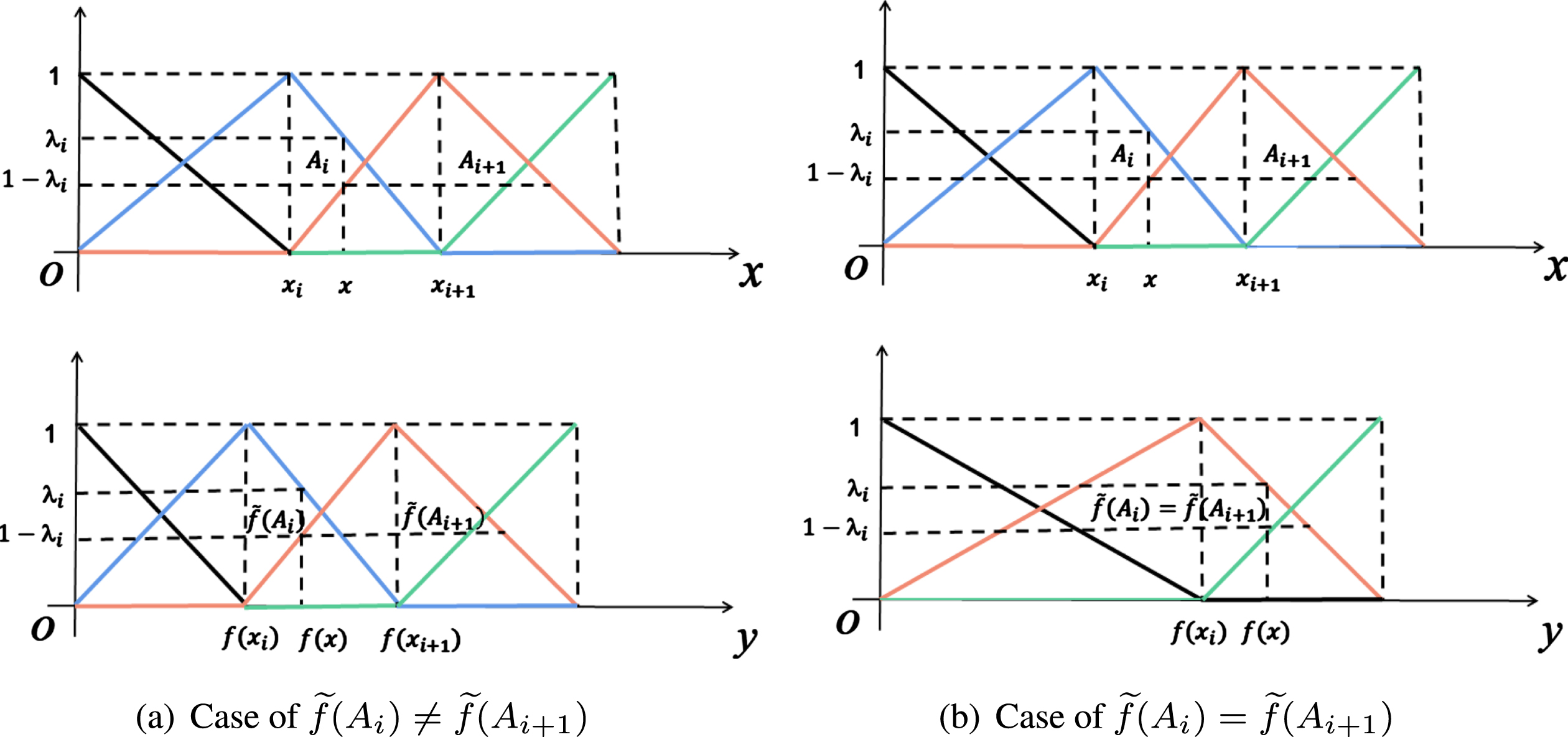
Graph of Algorithm 1.
The part (2) of Theorem 3.5 guarantees that
Consequently, the proposed fuzzy system could be represented by f (x) as follows.
l = 1, 2, ⋯ , n.
Based on previous sections, we see that f (x) is a piecewise function. The basic mechanism of the new fuzzy system f (x) is its interpolation property. Derived from computational mathematics theory, the new fuzzy system can approximate a given continuous function on a closed interval with arbitrary precision. For investigating approximation properties of the new fuzzy system based on five typical vague partitions mentioned in Section 3, the ∞-norm for a bounded function g (x) on U is defined as
Similarly, we have f (x) is second-order differentiable on (x
i
, xi+1) for
Consequently, f (x) is second-order differentiable on (x i , xi+1). □
Since the number of fuzzy rules is finite, it follows that the number of inflection points of f (x) is finite. Then following lemma is obtained immediately.
By Lagrange’s Mean Theorem, there exist φ ∈ (x
i
, xi+1) and γ ∈ (x
i
, xi+1) such that
Consequently,
For P (x), there is a fuzzy system f (x) form as Eq.(4.1) such that
Therefore,
Consequently,
Theorem 4.9 shows that the new fuzzy system is able to be a universal approximator.
□
□
Theorem 4.10 and Theorem 4.11 claim a fact that two factors determine approximation accuracy, that is, one is the number of fuzzy rules, the other is the supremum of ∣f′ (x) - h′ (x)∣, ∣f″ (x) - h″ (x)∣ for
Numerical examples
In this section, we employ six types of elementary functions and two types of functions compounded from the elementary functions to test the proposed fuzzy system (System I), and compare the approximation ability of the fuzzy system with the following fuzzy systems: the fuzzy system with triangular fuzzification and central average defuzzification (System II) [9]. the fuzzy system with Gauss fuzzification and central average defuzzification (System III) [9] the fuzzy system with quadratic polynomial fuzzification and central average defuzzification (System IV) [18]
equation 5.1 The center of a fuzzy set can be defined as if the average of all points that maximize the membership of a fuzzy set is a finite value, and then the average is called the center of the fuzzy set. The final output of the above three types of fuzzy systems is
For System II, let U = [α, β]. The expression for μ
A
i
(x) in Eq.(5.1) is
For System III, the expression for μ
A
i
(x) in Eq.(5.1) is
For System IV, let U = [α, β] and kerA
i
= {x
i
}, i = 1, 2, ⋯ , n. The expression for μ
A
i
(x) in Eq.(5.1) is
h1 (x) = x3, x ∈ [0, 2]; h2 (x) = e
x
, x ∈ [0, 2]; h3 (x) =3, x ∈ [0, 2]; h4 (x) = ln x, x ∈ [1, e]; h5 (x) = sin πx, x ∈ [1.5, 2.5]; h6 (x) = arcsin x, x ∈ [-1, 1].
We, respectively, design System I, System II, System III, and System IV to approximate these functions with three rules and compare the approximation capability of these fuzzy systems. For System I, the vague partition of the input universe is denoted by
Maximum errors of different systems
As shown in Table 1, System I has better approximation capability than the other three types of fuzzy systems. This also can be seen in the approximation of systems in Figs. 9–13
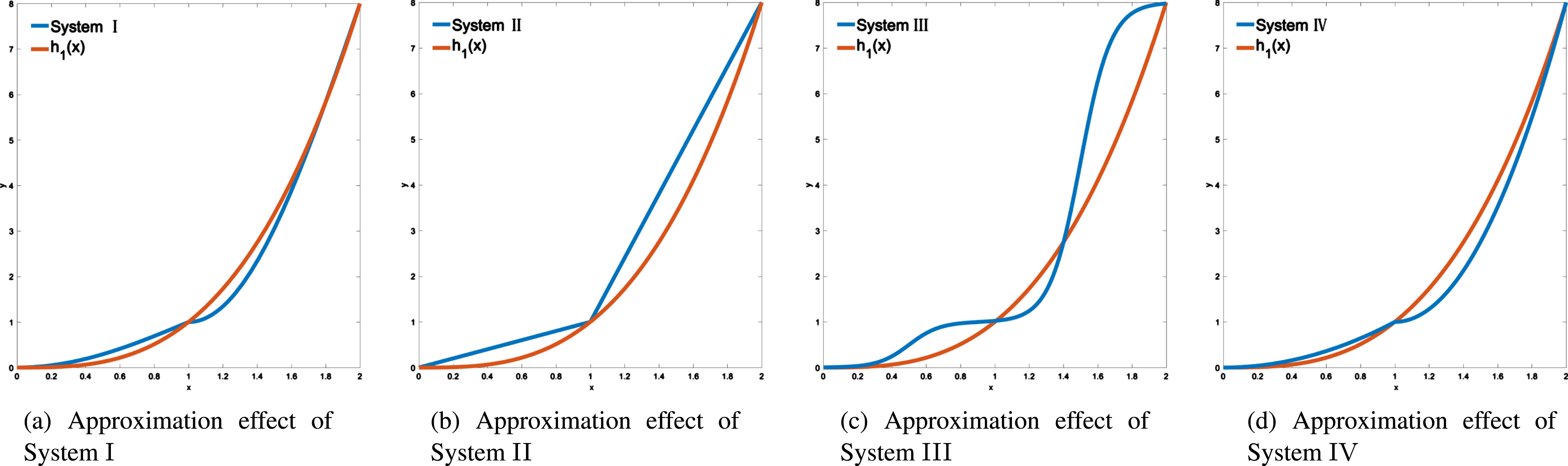
Approximation effect of Systems on h1(x).
Approximation effect of Systems on h2(x).
Approximation effect of Systems on h4(x).
Approximation effect of Systems on h5(x).
Approximation effect of Systems on h6(x).
For h3 (x) =3, the maximum errors of the above four fuzzy systems are all 0. Therefore, we do not show the approximation effect of the four systems on this function. For h5 (x) = sinπx, the maximum error of System I is 0. Therefore, the images representing System I and this function respectively coincide in Fig. 12(a).
Next, we test System I using two functions compounded from the elementary functions and compare the approximation ability of the other three fuzzy systems.
Consider the following two function: g1 (x) = cos 3x, x ∈ [0, 1.5708];
We, respectively, design System I, System II, System III, and System IV to approximate these functions with three rules and compare the approximation capability of these fuzzy systems. For System I, the vague partition of the input universe is denoted by
Maximum errors of different systems
Table 2 shows that, with three rules, the approximation performance of System I is better than the other three types of systems. This also can be seen in the approximation of systems shown in Fig. 14 and Fig. 15.
Approximation effect of Systems on g1(x).
Approximation effect of Systems on g2(x).
If we preset the precision as 0.0632 and 0.0177 for g1 (x) and g2 (x) respectively, we can calculate the minimum number of rules required by System II and System IV, as displayed in Table 3.
The minimum number of rules for systems
Table 3 shows that, for g1 (x) System II and System IV need 5 and 9 rules, respectively, to achieve the same approximation effect for System I with three fuzzy rules, for g2 (x) System II and System IV need 5 and 24 rules, respectively, to achieve the same approximation effect for System I with three fuzzy rules. It implies that uppercaseexpandafterromannumeral1 can perform well with a few fuzzy rules.
In this article, we investigated the mathematical properties of regular vague partitions. On the basis of these, we proposed a new type of fuzzy system derived from five typical single-kernel vague partitions. The new fuzzy system can deal with the information from the fuzzy rule base directly, then structures of fuzzification, fuzzy reasoning engine and defuzzification are omitted. Experiments on approximating six types of elementary functions and two functions compounded from elementary functions claimed that the new fuzzy system could achieve the reported results with a few fuzzy rules. In the future, we will establish a multidimensional fuzzy rule base by building vague partitions on
Footnotes
Acknowledgments
This work was partially funded by the National Natural Science Foundation of China (Grant Nos. 61673320).
Appendix A
(1) h1 (x) = x3, x ∈ [0, 2]. U1 = [0, 2], then
V1 = [1, e2], then
(2) h2 (x) = e
x
, x ∈ [0, 2]. U2 = [0, 2], then
V2 = [1, e2], then
(3) h3 (x), x ∈ [0, 2]. U3 = [0, 2], then
V3 = {3}, then
(4) h4 (x) = ln x, x ∈ [1, e]. U4 = [1, e], then
V4 = [0, 1], then
V5 = [-1, 1], then
(6) h6 (x) = arcsin x, x ∈ [-1, 1]. U6 = [-1, 1], then
Appendix B
(1) g1 (x) = cos 3x, x ∈ [0, 1.5708]. U1 = [0, 1.5708], then
V2 = [0, 1],then