
Abstract
In this paper we create a new topological structure induced by connected simple undirected graphs called maximal block topological space and study some properties of this new type of topology. Also, define some concepts in maximal block topological space like (derived subgraph, closure subgraph and interior subgraph). Some results and properties of vertices and subgraphs in G due to maximal block topological space are proved and discussed. Moreover, showed that a maximal block topological space is T0-space and T1/2-space if and only if G is acyclic graph. Finally, irreducibility and topologically independent of maximal block topological space are introduced.
Introduction
A graph G = (U (G) , E (G)) is a finite, nonempty set U (G), together with a (possibly empty) set E (G) of element subsets of U (G). The elements of U are called vertices, while those of E are called edges. A subgraph H of a graph G is a graph having all of its vertices and edges in G. Thus, H is a subgraph of G, if and only if U (H) ⊆ U (G) and E (H) ⊆ E (G). A graph G is connected if for each pair of its vertices there is a path connecting them, otherwise, it is disconnected. A component of G is a maximal connected subgraph of G. A vertex u of a graph G is a cut vertex if the deletion of u increases the number of components in G. A nontrivial connected graph G is said to be a non-separable graph if it has no cut vertices. A block of a graph is a maximal non-separable subgraph of G. If G has no cut vertex, G itself is a block. A block that has exactly one cut vertex of G is called an end block. A graph G is acyclic if it has no cycles. A graph G is acyclic if and only if any block in G is K2 or if G is acyclic graph, then one of any two vertices is in different blocks. For more details about concepts in graph theory, we refer to [1, 2].
Let X be a non-empty set. A topology on X is a collection τ of subsets of X, such that: ∅ and X belong to τ, an arbitrary union of members in τ belongs to τ and a finite intersection of members of τ belongs to τ, the pair (X, τ) is called topological space. Let H be a subset of a topological space (X, τ), the interior of H is the union of all open sets contained in H and is denoted by int (H). The closure of the set H is the intersection of all closed subsets containing H and is denoted by Cl (H). A topological space (X, τ) is said to be a T0-space, if for any distinct points in X, then there exists an open set containing one of them but not the other. A topological space (X, τ) is said to be a T1/2-space if every singleton set in X is either open or closed see [3, 9].
Recently, some researchers have generated topologies from graphs by using different methods. In [8] Kozae et al, introduced new types of topological structures by graphs and constructed a computer program that builds graphs and its topological graphs also they presented some examples of different kinds of graphs and their topological graphs and studied some of their topological and algebraic properties. In [5] Jafarian et al, associated a topology to a graph G, called graphic topology of G and they showed that it is an Alexandroff topology, also investigated some properties of this type of topology. Kilicman and Abdulkalek, in [7] presented a new type of topology induced by set of vertices for any simple graph (finite or infinite), called incidence topology. Some properties of this type of topology were investigated and introduced a comparison between two different subbases to generate a topology. Nianga and Canoy in [11], introduced a way of constructing a topology from a simple undirected graph by utilizing the hop neighborhoods of the graph and described the topologies induced by the complete, path and the fan graphs. In [12] Sari and Kopuzlu, studied topologies generated by simple undirected graphs without isolated vertices and their properties. Also,they presented necessary and sufficient condition for the topological spaces generated by two different graphs to be homeomorphic. Nada et al in [10], structured a new type of topological space generating by graphs, also investigated an algorithm to generate the topological structures from different graphs. In [4], the authors defined new types of topological spaces generated by sets of coneighbor vertices and coneighbor edges of a graph and they proved that every coneighbor topological space is an Alexandroff space. Moreover, a necessary and sufficient condition is provided to a coneighbor topological space of a graph G to be compact. The coneighbor topological space of a graph G does not satisfied the weak separation axioms while it is both regular and normal. In [6] Khalaf and Padma defined neutrosophic fuzzy graphs and they obtained some properties of such graphs. Tran et al in [13] introduced some other types of graph topological spaces called neutrosophic soft graph topological spaces which are constructed from vertices and edges of the graph.
The main purpose of this paper is to define a new type of topology induced by cut vertices and blocks in a graph G called maximal block topology. Some results and properties of T0-space, T1/2-space, irreducible graph space, completely irreducible graph space, topologically independent graph space and weak topologically independent graph space via maximal block topological space are present.
Maximal block topological space
In this section, we use a set of cut vertices and blocks in a connected undirected graph G to generate a new type of topological space called maximal block topological space, also introduce some properties and results of maximal block topological space.
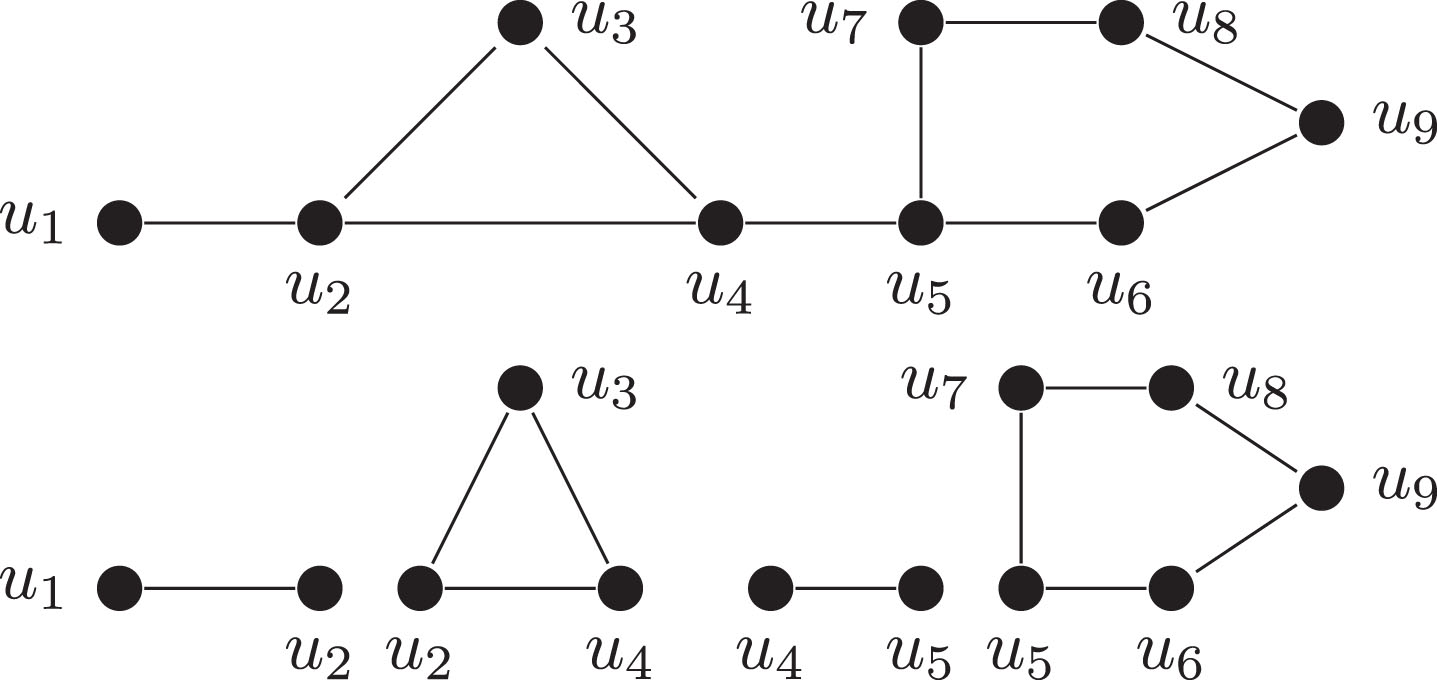
Simple connected undirected graph G with their blocks.
We have blocks B1 = {u1, u2}, B2 = {u2, u3, u4}, B3 = {u4, u5}, B4 = {u5, u6, u7, u8, u9}. Cut vertices of the graph G in Fig. 1 are: {u2}, {u4} and {u5}. So, we have
S = {B1, B2, B3, B4} = {{u1, u2} , {u2, u3, u4} , {u4, u5} , {u5, u6, u7, u8, u9}}. Hence, the maximal block base induced by the graph G in Fig. 1 is given by
Therefore, the maximal block topology of the graph G in Fig. 1 is given by
τ M = {∅ , U (G) , {u2} , {u4} , {u5, u1, u2} , {u2, u3, u4} , {u4, u5} , {u5, u6, u7, u8, u9} , {u2, u4} , {u2, u5} , {u2, u4, u5} , {u2, u5, u6, u7, u8, u9} , {u1, u2, u4} , {u4, u5, u6, u7, u8, u9} , {u1, u2, u5} , {u2, u3, u4, u5} , {u1, u2, u3, u4} , {u1, u2, u4, u5} , {u1, u2, u5, u6, u7, u8, u9} , {u2, u3, u4, u5, u6, u7, u8, u9} , {u1, u2, u4, u5, u6, u7, u8, u9} , {u1, u2, u3, u4, u5}}.
And the dual maximal block topology (τ M ) c is given by
(τ M ) c = {∅ , U (G) , {u1, u3, u4, u5, u6, u7, u8, u9} , {u1, u2, u3, u5, u6, u7, u8, u9} , {u1, u2, u3, u4, u6, u7, u8, u9} , {u3, u4, u5, u6, u7, u8, u9} , {u1, u5, u6, u7, u8, u9} , {u1, u2, u3, u6, u7, u8, u9} , {u1, u2, u3, u4} , {u1, u3, u5, u6, u7, u8, u9} , {u1, u3, u6, u7, u8, u9} , {u1, u3, u6, u7, u8, u9} , {u1, u3, u4} , {u3, u5, u6, u7, u8, u9} , {u1, u2, u3} , {u3, u4, u6, u7, u8, u9} , {u1, u6, u7, u8, u9} , {u5, u6, u7, u8, u9} , {u3, u6, u7, u8, u9} , {u3, u4} , {u1} , {u3} , {u6, u7, u8, u9}}.
The following results are true if G is a simple connected graph.
Each block of G is an open subgraph in τ
M
. u is a cut vertex in G if and only if {u} ∈ τ
M
. If u is a pendant vertex in G, then {u} is closed subgraph in τ
M
. u is non-cut vertex in G if and only if {u} ∉ τ
M
. If u is non-cut vertex in a block B in which all other vertices in B are cut vertices, then {u} is closed subgraph in τ
M
.
The converse of case (3) need not be true in general.
In Example 2.2, u3 in G is closed subgraph in τ M , but it is not pendant vertex in G.

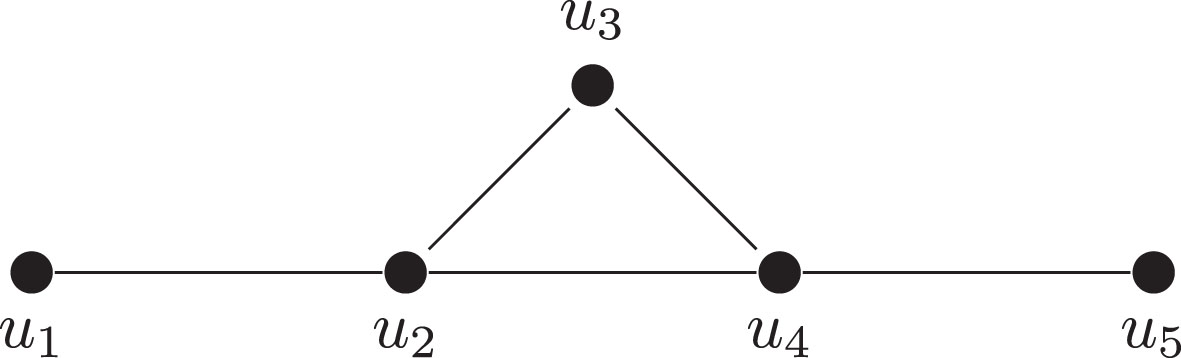
Non-simple connected undirected graph G.
The maximal block topology of the graph G in Fig. 2 is given by
τ M = {∅ , U (G) , {u2} , {u1, u2} , {u2, u3, u4}}. Hence, {u1} is closed subgraph but it is not pendant vertex.
∩B
i
is open in τ
M
. ∪B
i
is open in τ
M
.
The intersection of any family of blocks is either empty or a cut vertex which is open in τ
M
. Hence ∩B
i
is open in τ
M
. Obvious by Definition 2.1. □
(G, τ
B
) is coarser than the (G, τ
M
) if and only if G has cut vertex. (G, τ
B
) is homeomorphic to (G, τ
M
) if and only if G has no cut vertex. (G, τ
B
) may not contains a cut vertex. The maximal block topological space (G, τ
M
) is indiscrete topology if and only if G has no cut vertex.
On the other hand, if each cycle block C p in G has p or p - 1 cut vertices, then every non-cut vertex in G lies in a block in which the other vertices are cut vertices. Hence, by Lemma 2.3, non-cut vertices are closed in (G, τ M ). □
In this section, we define derived subgraph, closure subgraph and interior subgraph and study their properties in maximal block topological space. separated subgraphs and some results are introduce.
In the following, we redefine some of the topological concepts over this type of maximal block topological spaces.
The set of all limit vertex of H is called the derived subgraph of H and it is denoted by d M (H).
Conversely, if u is a cut vertex, then u ∉ d M (H). Hence, each open subgraph S such that H∩ S \ {u} ≠ ∅ is true only when S is a block containing a non-cut vertex. □
The closure subgraph of H, is defined as the intersection of all closed subgraphs of G containing H. That is Cl
M
(H) = ⋂ {S ∈ (τ
M
)
c
: H ⊆ S}. The interior subgraph of H, is defined as the union of all open subgraphs contained in H. That is int
M
(H) = ⋃ {S ∈ τ
M
: S ⊆ H}.
Cl
M
(H) is the smallest closed subgraph containing H. H is closed subgraph if and only if Cl
M
(H) = H. int
M
(H) is the largest open subgraph contained in H. H is open subgraph if and only if int
M
(H) = H. Cl
M
(H) = H ⋃ d
M
(H). int
M
(H) = (⋃ {B ⊆ H}) ⋃ {u : u ∈ C (H)}.
u is non-cut vertex in a block B if and only if Cl
M
({u}) = B \ C (B). If {Bλ : λ ∈ Λ} is a family of blocks in G and u is the cut vertex such that u ∈ ⋂ λ∈ΛBλ, then Cl
M
({u}) = (⋃ λ∈ΛBλ) \ C* (⋃ λ∈ΛBλ). u is the only cut vertex in G if and only if Cl
M
({u}) = G. u is a cut vertex if and only if int
M
({u}) = {u}. u is non-cut vertex if and only if int
M
({u}) =∅.
The following corollary follows directly from Proposition 3.7.
If u is a cut vertex in a graph G, then u ∉ Cl
M
({v}) for all v ∈ G and hence, Cl
M
({u}) ≠ Cl
M
({v}). If u is a pendant vertex in a connected simple graph G of order greater than 2, then v ∉ Cl
M
({u}) for all v ∈ G and hence, Cl
M
({u}) ≠ Cl
M
({v}). If u and v are not in the same block in G, then Cl
M
({u}) ∩ Cl
M
({v}) = φ.
Follows from Lemma 3.6. Follows from Lemma 3.6. Let u ∈ B1 and v ∈ B2. then either B1 ∩ B2 = φ or there is a cut vertex w such that B1 ∩ B2 = w. Hence, Cl
M
(u) = B1 \ C (B1) ⊆ B1 and Cl
M
(v) = B2 \ C (B2) ⊆ B2. Therefore, Cl
M
({u}) ∩ Cl
M
({v}) = φ. □
u and v are non-cut vertices and they are in the same cycle block if and only if Cl
M
({u}) = Cl
M
({v}). If u ∈ Cl
M
({v}) or v ∈ Cl
M
({u}), then u and v are in the same block in G.
Since u and v are non-cut vertices and they are in the same cycle block B in G containing u and v, then by Definition 3.3(1), we have Cl
M
({u}) = {u} ∪ (B \ C (B)) = B \ C (B) and Cl
M
({v}) = {v} ∪ (B \ C (B)) = B \ C (B). Hence, Cl
M
({u}) = Cl
M
({v}). Conversely, if Cl
M
({u}) = Cl
M
({v}), that is u and v are in the same cycle block in G, so u and v are non-cut vertices in G. It is obvious by Definition 2.1. □
T0 and T1/2-spaces
In this section, we define T0-space and T1/2-spaces induced by a graph G and we give some of their properties in the maximal block topological space.
If u and v are in the same block, u is a pendant vertex adjacent to v and v is cut vertex, then by Definition 3.3(1), Cl
M
({u}) = {u} and Cl
M
({v}) = {u, v}, then Cl
M
({u}) ≠ Cl
M
({v}). If u and v are in the same block and they are cut vertices and u adjacent to a pendant vertex w and v adjacent to a pendant vertex z, then by Definition 3.3(1), we have Cl
M
({u}) = {u, w} and Cl
M
({v}) = {v, z}, then Cl
M
({u}) ≠ Cl
M
({v}). If u and v are in the same block and they are cut vertices and u adjacent to a pendant vertex w and v adjacent to a cut vertex z, then by Definition 3.3(1), we have Cl
M
({u}) = {u, w} and Cl
M
({v}) = {v}, then Cl
M
({u}) ≠ Cl
M
({v}). If u and v are in the same block and they are cut vertices and u adjacent to a vertex w and v adjacent to a cut vertex z, then by Definition 3.3(1), we have Cl
M
({u}) = {u} and Cl
M
({v}) = {v}, then Cl
M
({u}) ≠ Cl
M
({v}). If u and v are not in the same block, then by Definition 3.3(1), we get the result. □
The converse of the above theorem need not be true in general.
From Example 2.2, we have Cl M ({u4}) ≠ Cl M ({u5}), but every block in G is not K2.
The converse of Theorem 4.4 need not be true in general.
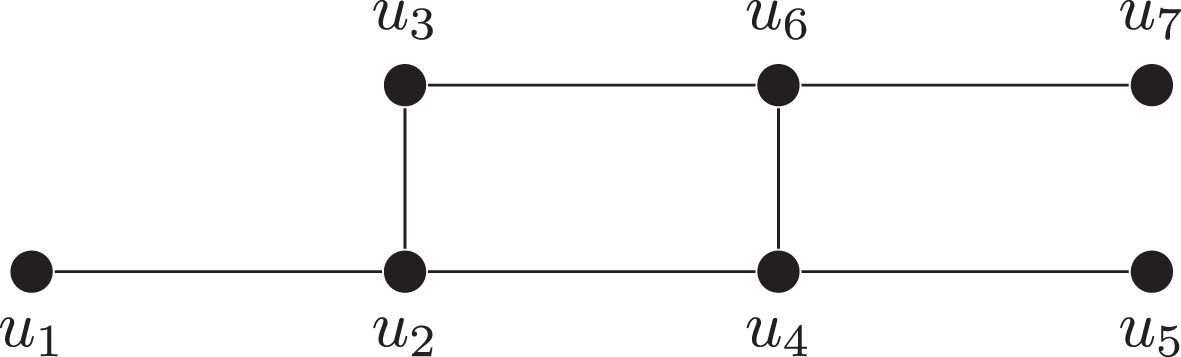
Simple connected undirected non-acyclic graph G.
Therefore, the maximal block topology of a graph G in Fig. 3 is given by
τ M = {∅ , G, {u2} , {u4} , {u6} , {u1, u2} , {u2, u3, u4, u6} , {u4, u5} , {u6, u7} , {u2, u4} , {u2, u6} , {u4, u6} , {u2, u4, u5} , {u2, u4, u6} , {u2, u6, u7} , {u1, u2, u4} , {u4, u6, u7} , {u1, u2, u6} , {u4, u5, u6} , {u1, u2, u4, u5} , {u2, u3, u4, u6} , {u1, u2, u6, u7} , {u4, u5, u6, u7} , {u1, u2, u3, u4, u6} , {u2, u3, u4, u5, u6} , {u2, u3, u4, u6, u7} , {u1, u2, u3, u4, u5, u6} , {u1, u2, u3, u4, u6, u7} , {u1, u2, u4, u5, u6, u7} , {u2, u3, u4, u5, u6, u7}}.
It is easy to show that τ M of G in Fig. 3 is T0-space, because for every two distinct vertices in G, there exist an open subgraph in τ M containing one of them but not the other.
Simple connected subgraph from a graph G in Fig. 1.
Conversely, if |B| ≤ |C (B) |+1 for every block B ∈ S, then each block B in G has cut vertices of order p or p - 1 (p order of each block B in G), that is, each vertex in G containing in one block or in two blocks in G, then for any two distinct vertices u and v, there exists an open subgraph V in (G, τ M ) such that u ∈ V, v ∉ V or u ∉ V, v ∈ V. Hence (G, τ M ) is a T0-space. □
Conversely, if every cycle block C p in G has p or p - 1 cut vertices, then the cardinality of each set of cut vertices is p or p - 1 and cardinality of each cycle block C p is p, then |C p | ≤ p + 1 or |C p | ≤ (p - 1) +1 holds for every block B ∈ S, by Theorem 4.7, (G, τ M ) is a T0-space. □
The converse of the above lemma need not be true in general. See Example 4.5.
The Converse of above lemma need not be true in general. See Example 4.5.
In Example 2.2, the maximal block topological space is not T0-space because |B4|=5 and |C (B4) |=1 which implies that |B4| > |C (B4) |+1.
The star graph S of order n is a graph in which n - 1 vertices have degree 1 and a single vertex have degree n - 1, this single vertex is the only cut vertex in S.
The converse of the above corollary need not be true in general.
In Example 2.2, G has more than one cut vertex, let u6 and u7 be two vertices in G, but there exist no open subgraphs in τ M containing one of them but not the other. Hence τ M is not T0-space.
It is obvious that every T1/2-space is T0. However, the converse may not be true in general. But we have the following result.
As an example of a T0-space which is not T1/2, we can consider a graph G with set of vertices V (G) = {u1, u2, u3} and a topology τ = {φ, G, {u1} , {u1, u2}}. It is clear that τ is not a maximal block topology for any such graph G. Moreover, this space is not T1/2 because {u2} is neither open nor closed but obviously it is T0.
In this section, we define the surrounding subgraph and comparable subgraphs in a topological space (G, τ) induced by a graph G. Also some properties and results of surrounding subgraph and comparable subgraphs in a maximal block topological space (G, τ M ) are present.
From Example 2.2, let H1 = {u2} and H2 = {u2, u3, u4} are comparable subgraphs. And let H1 = {u1, u2} and H2 = {u2, u3, u4} are not comparable subgraphs.
In Example 2.2, H1 = {u2, u3} and H2 = {u1, u3, u4}, then M H 1 = {u2, u3, u4} and M H 2 = {u1, u2, u3, u4}, therefore M H 1 ⊆ M H 2 , hence H1 and H2 are comparable subgraphs in G.
Transitivity, if u ≤ v and v ≤ w, then M u ⊆ M v and M v ⊆ M w implies that M u ⊆ M w . Hence, u ≤ w.
If G is acyclic or contains blocks B with |B| ≤ |C (B) |+1, then either u and v are incomparable whenever they are both cut vertices or they are in distinct blocks. If u and v are in the same block with one of them cut vertex (say u), then u ∈ M v but not the converse. Hence, the relation is antisymmetric.
Conversely, suppose that the relation ≤ is antisymmetric and G contains a block with |B| > |C (B) |+1, then there is two vertices u and v are in the same block which are not cut vertices, this implies that u ∈ M v and v ∈ M u which is contradiction. Hence G is acyclic graph or |B| ≤ |C (B) |+1. □
In Example 2.2, M u 6 = {u5, u6, u7, u8, u9} = M u 7 , but N (u6) = {u5, u6, u8} and N (u7) = {u5, u7, u9}, hence N (u6) ≠ N (u7).
A vertex u in a graph G is irreducible if u ≤ v for all comparable vertices v ∈ G with u. A vertex u in a graph G is completely irreducible vertex if M
u
= {u}. A subgraph H1 in a graph G is said to be irreducible subgraph if M
H
1
⊆ M
H
2
for any subgraph H2 in G. A subgraph H in a graph G is said to be completely irreducible subgraph if M
H
= H.
The converse of the above theorem is not be true in general.
From Example 2.2, let H1 = {u1} and H2 = {u1, u2, u3}, then M H 1 = {u1, u2} and M H 2 = {u1, u2, u3, u4} and M H 1 ⊆ M H 2 , hence H1 is irreducible subgraph, but it is not completely irreducible subgraph in G, because H1 ≠ M H 1 .
In Example 2.2, let H1 = {u1} and H2 = {u1, u2, u3}, then M H 1 = {u1, u2} and M H 2 = {u1, u2, u3, u4}, then M H 1 ⊆ M H 2 , so H1 is irreducible subgraphs in G, but it is not open subgraph in (G, τ M ).
The converse of above theorem need not be true in general.
In Example 2.2, M u 3 = {u2, u3, u4} and M u 6 = {u5, u6, u7, u8, u9}, then M u 3 ∩ M u 6 = ∅, but u3 and u6 are not completely irreducible vertices.
In Example 2.2, let H1 = {u1}, H2 = {u2, u3} and H3 = {u1, u4} then M H 1 = {u1, u2}, M H 2 = {u1, u2, u3, u4} and M H 2 = {u1, u2, u3, u4}, then M H 1 ⊆ M H 2 and M H 2 ⊆ M H 3 , hence H1 and H2 are distinct irreducible subgraphs in G, but M H 1 ∩ M H 2 = {u1, u2} ≠ ∅.
Also, in Example 2.2, we have int M ({u1}) =∅ and int M ({u7}) =∅, then int M ({u1})∩ int M ({u7}) = ∅, but u1 and u7 are not completely irreducible vertices.
In Example 2.2, let H1 = {u1, u3, u4} and H2 = {u1, u2, u3}, then M H 1 = {u1, u2, u3, u4} and M H 2 = {u1, u2, u3, u4}, then M H 1 ⊆ M H 2 , hence H1 is a subgrph in G, but it is neither irreducible open subgraph nor completely irreducible open subgraph in (G, τ M ).
Union of two completely irreducible subgraphs is completely irreducible subgraph. Intersection of two completely irreducible subgraphs is completely irreducible subgraph.
Two vertices u and v in a graph G are topologically independent vertices if there exists an open subgraph in (G, τ) containing u but not containing v and also there exists an open subgraph in (G, τ) containing v but not containing u. Two vertices u and v in a graph G are weak topologically independent vertices if there exists an open subgraph in (G, τ) containing u but not containing v or there exists an open subgraph in (G, τ) containing v but not containing u. A subgraph H in a graph G is topologically independent subgraph if the vertices of H are pairwise topologically independent vertices. A topologically independent subgraph is also called a stable subgraph. A subgraph H in a graph G is weak topologically independent subgraph if the vertices of H are pairwise weak topologically independent vertices. A weak topologically independent subgraph is also called a weak stable subgraph. An open subgraph H in (G, τ) is stable open subgraph if the vertices of H are pairwise topologically independent vertices. An open subgraph H in (G, τ) is weak stable open subgraph if the vertices of H are pairwise weak topologically independent vertices. If all vertices in a graph G are topologically independent vertices, then (G, τ) is called topologically independent graph space. If all vertices in a graph G are weak topologically independent vertices, then (G, τ) is called weak topologically independent graph space.
If u, v are cut vertices or they are in different blocks, then they are topologically independent. If u is a cut vertex and v is a non-cut vertex and they lies in the same block, then they are weak topologically independent. The subgraph C (G) is topologically independent subgraph and hence it is a stable subgraph.
From Example 2.2, let H = {u2, u3, u4}, then u2 and u3 are not topologically independent vertices, then H is not stable open subgraph, but H is weak stable open subgraph. And let H = {u4, u5}, then u4 and u5 are topologically independent vertices, then H is stable open subgraph and also is weak stable open subgraph.
The converse of the above theorem need not be true in general. See Example 2.2, every open subgraph in (G, τ M ) is weak stable open subgraph, but G is not acyclic graph.
See Example 2.2, a maximal block topological space (G, τ M ) is weak topologically independent space, but G is not acyclic graph.
Conclusion
In this paper, we generated a topological space via simple graph G by blocks and cut vertices in G called maximal block topological space, some properties and results of this type of topology was presented. Some topological concepts namely, derived, closure and interior subgraphs were defined. Also, we proved that in a maximal block topological space both T0-space and T1/2-space are equivalent. Finally, irreducibility and topologically independent of maximal block topological space were introduced.