
Abstract
Punishment promotes cooperation among selfish agents. Unlike previous studies, we propose a new supervision (heterogeneous preference supervision, HPS) mechanism based on the original random supervision (ORS) mechanism considering regulators’ limited supervision ability and agents’ heterogeneous preferences. The concepts of exemption list capacity, observation period, and removal time are introduced as the variables under the HPS mechanism. A public goods game model is built to verify the supervision effects under the ORS and HPS mechanisms. The simulation results show that the HPS mechanism can promote cooperation more than the ORS mechanism. Increasing the exemption list capacity can make regulators pay more attention to defectors and improve the cooperation level. Setting a relatively moderate observation period benefits a better supervision effect, while a too-small or too-large observation period leads to the collapse of cooperation. Shortening the removal time can increase the updating speed of the exemption list and enhance the role of the exemption list, resulting in improving the fraction of cooperators.
Keywords
Introduction
Cooperation is a common behavior in social activities [1]. However, cooperation among selfish individuals, based on the Darwinian theory of evolution, is a complex problem [2]. Many scholars from various fields have tried to explain cooperation behavior. Nowak proposes a new viewpoint and holds that the evolution of individuals and cooperation promotes each other [3]. Evolutionary game theory is a powerful tool for simulating the evolution of cooperation among multi-agents in a social dilemma [4, 5]. In previous studies, various game models, such as the prisoner’s dilemma game [6], the snowdrift game [7], and the public goods game (PGG) [8, 9], have been introduced to explore the cooperation issue.
In the original spatial PGG model [10], N agents play games through the network connection. Each cooperator invests an amount c to the common pool, while each defector invests nothing. The total investment of a common pool is multiplied by the synergy factor to obtain the total payoff. The total payoff is redistributed uniformly by all agents who participate in games of this common pool, whether they are cooperators or defectors. Furthermore, some mechanisms affecting the evolution of cooperation have been proposed under the background of PGGs, such as investment heterogeneity [11, 12], income redistribution [13], social diversity [14], reputation [15], reward [16], punishment [17, 18], and so on.
In this paper, we delve into the innovation of the supervision mechanism utilizing punishment. Punishment is an effective way to sustain cooperation among selfish agents [19]. To date, several supervision mechanisms based on punishment have been proposed. We describe some supervision mechanisms from two aspects: (1) who is the punisher, (2) who is the punished. One such mechanism is the punishing minority, where agents with the majority strategy punish those with the minority strategy in a PGG group [20]. In the mutual punishment mechanism, two agents punish each other if their strategies differ [21]. Alternatively, the conditional neutral punishment mechanism entails agents with lower payoffs than their neighbors’ average payoff punishing neighbors with opposite strategies [22]. Under the reputation-based punishment mechanism, a defector with a low reputation in a PGG group is punished by neighbors [23]. Moreover, agents who successively adopt the defection strategy more than the tolerance threshold are punished by their neighbors adopting the cooperation strategy under the tolerance-based punishment mechanism [24]. The synergy punishment mechanism makes the cooperators become punishers with a probability and punish defectors in the same group [25]. Besides, the more defectors in the same group, the higher the probability that a cooperator becomes a punisher.
To summarize, the studies above have explored supervision mechanisms from two perspectives: (1) the selection of punished agents and (2) the methods of supervision. First, in most mechanisms, regulators tend to select defectors as the punished agents; however, the impact of selecting different defectors on the evolution of cooperation can vary. For instance, supervision mechanisms that identify supervised agents based on reputation and tolerance have shown the ability to stabilize cooperation under adverse conditions and promote cooperation [23, 24]. Therefore, it is crucial to reduce the randomness of punishment and appropriately select supervised agents in the population to enhance the efficiency of supervision. Second, we need to consider the constraint of limited supervision ability. In real-world scenarios, regulators face challenges in supervising the behavior of all agents after each interaction, especially when the number of agents is large. Regulators often have limitations in punishing defectors, and their scope of supervision is limited [26]. Consequently, selecting agents with specific characteristics as supervised individuals can address this constraint. For example, Fan et al. investigated the government’s low-carbon subsidy supervision strategy and proposed three supervision mechanisms: randomly supervising all enterprises, randomly supervising enterprises receiving high subsidies, and randomly supervising enterprises declaring high subsidies [27]. Compared to randomly supervising all enterprises, the latter two mechanisms narrow the scope of supervision. Their findings revealed that randomly supervising enterprises declaring high subsidies is more effective than supervising all enterprises. In light of this, we consider a situation where supervision ability is limited and assume that regulators can only supervise a certain proportion of agents within the entire population.
The hypothesis of bounded rationality holds that decision-makers are not entirely rational [28, 29]. Preference is the primary manifestation of bounded rationality. Camerer introduced social preferences into the game theory [28]. Common preferences mainly include fair preference [27], reciprocal preference [30], and altruistic preference [31]. Risk preferences are another manifestation of bounded rationality that demonstrates an agent’s attitude toward potential risks, such as risk-averse and risk-seeking [32, 33]. Risk-averse agents prefer a safe strategy to avoid potential losses, while risk-seeking agents prefer an adventurous strategy for a higher payoff. Some studies have explored the combination of risk preferences and supervision. For example, Bontems and Thomas studied a model of pollution supervision for risk-averse farmers involving hidden information and moral hazard [34]. The results indicated that risk aversion is a crucial factor affecting supervision, and regulators need to consider the impact of risk preference on agents’ strategy selection. Camacho-Cuena and Requate proposed three supervision mechanisms: collective fining, random fining, and a tax-subsidy scheme [32]. By comparing agents’ strategy selections under different supervision mechanisms, they found that the performance of random fining worsens if agents are risk-seeking. However, the current research has predominantly concentrated on examining the impact of specific types of preferences on cooperation, while overlooking the cognitive diversity among agents.
Recent research has increasingly recognized the crucial role of heterogeneity in social issues. Heterogeneity refers to individual differences and diversity, which can manifest in preferences, risk attitudes, and other relevant factors. In economic terms, preferences may differ across agents [35]. Heterogeneous preferences refer to the different tendencies of agents in decision-making due to their cognitive differences. Numerous studies have focused on the impact of heterogeneous preferences on decision-making in various domains, such as consumer preferences [36], investment preferences [37], preferences for medical treatment options [38], and risk preferences [37, 39]. For instance, Fischbacher et al. discovered that agents have different investment preferences through experiments and surveys [37]. Besides, agents with a preference for risk-seeking are more likely to renovate their homes for energy-saving measures than risk-averse agents. Therefore, within the same decision-making environment, heterogeneous preferences in a population lead to decision variations. There are two main approaches to quantifying preferences. One method involves quantifying individuals’ preferences in a specific scenario through experiments, surveys, and other investigations [37, 40]. The other method employs standard mathematical models to simulate the distribution of preferences within a population, assuming preferences follow a uniform or normal distribution [39, 42]. While numerous studies have explored the impact of preference differences on decision-making in various domains, there is a notable gap in research regarding the utilization of heterogeneous preferences to intervene in decision-making processes. Thus, we aim to propose a new supervision mechanism that utilizes the decision differences caused by heterogeneous preferences to influence individuals’ decision-making and promote cooperation.
Inspired by these studies, our research aims to develop a new supervision mechanism that can sustain a higher level of cooperation while considering the constraint of limited supervision ability. We propose a spatial PGG model considering agents’ heterogeneous preferences and regulators’ limited supervision ability. We introduce a new supervision mechanism called heterogeneous preference supervision (HPS), which includes variables such as the supervision exemption list capacity, observation period, and removal time. Under the HPS mechanism, regulators judge agents’ risk preference type based on their historical strategies. If agents continuously adopt cooperation strategies when being supervised, regulators add them to the exemption list as risk-averse individuals. To avoid arbitrary decisions, regulators only randomly select agents outside the exemption list as the supervised individuals and punish defectors under supervision. To validate the effectiveness of the HPS mechanism under different supervision abilities, we compare its results with those of the original random supervision (ORS) mechanism. The ORS mechanism involves regulators randomly selecting agents in the population to supervise. In a word, our study uses heterogeneous preferences to provide new insights for reforming the supervision mechanism to promote cooperation in scenarios with limited supervision ability.
The following sections of this paper are organized as follows: Section 2 presents a PGG model description incorporating the HPS mechanism. In Section 3, we investigate the influence of the primary variables on the evolution of cooperation through numerical simulations and the case study and compare the cooperation levels under the ORS and HPS mechanisms. Lastly, in Section 4, we present conclusions and discuss the limitations of our study.
Model
PGGs considering punishment
We consider the evolutionary PGGs on a square lattice network, where nodes denote agents and edges represent the interaction relationship. Each node has a degree of d. Agents can adopt cooperation (C) and defection (D) strategies. At the initial time, each agent is a cooperator or defector with the same probability. Each PGG group consists of a focal node and d neighbors. If agent i adopts the cooperation strategy, s
i
= 1. Otherwise, s
i
= 0. The payoff of agent i obtained from the focal agent j is
According to the original Fermi rule [43], all agents update their strategies synchronously. Agent i chooses a neighbor j randomly. Agent i adopts agent j’s strategy with the probability
According to Equation (6), we can see that RA agents prefer learning cooperators’ strategies, while RS agents prefer learning defectors’ strategies. If the strategies of agent i and j are the same, agent i remains the strategy unchanged.
We consider a population composed of N agents on the network. Due to the constraint of the supervision ability, regulators supervise μN agents at each discrete time simultaneously, where 0 ⩽ μ ⩽ 1 is the supervision ability. There are two supervision mechanisms: the original random supervision (ORS) mechanism and the supervision mechanism considering heterogeneous preferences (HPS). Under the ORS mechanism, regulators choose the supervised agents randomly. Under the HPS mechanism, regulators judge agents’ preferences according to historical strategies and select the potential RS agents as supervised individuals.
At the initial time, regulators cannot judge agents’ preferences under the HPS mechanism due to the lack of historical strategies. Regulators establish a file for each agent to record their historical strategies. λ
i
= (λi1, λi2, …, λ
il
, … λ
in
) refers to agent i’s supervision file and is updated when agent i is supervised, where n denotes the number of times that agent i has been supervised. λ
il
is the l-th supervision result of agent i. The value of λ
il
depends on agent i’s strategy
We introduce the exemption list to propose the HPS mechanism. Regulators add agents identified as RA individuals to the exemption list and do not supervise agents inside the exemption list. The parameter θ denotes the observation period. If the last θ supervision results in λ i are all 1, regulators identify agent i as a RA individual and add agent i to the exemption list.
The exemption list capacity, k, represents the maximum number of agents that the exemption list can accommodate. The exemption list capacity meets the constraint condition of 0 ⩽ k ⩽ (1 - μ) N. Notably, the case of k = 0 means that regulators adopt the ORS mechanism.
y (t) and y
RA
(t) refer to the number of all agents and the RA agents inside the exemption list at the time t, respectively. Regulators randomly choose N - y (t) agents outside the exemption list for supervision. We introduce a parameter φ to measure the accuracy of regulators’ judgment regarding agents’ risk preferences
The exemption list evolves dynamically. First, regulators add the supervised agents who meet the condition of the observation period to the exemption list at each time. Second, the parameter m denotes the removal time. If an agent continuously remains inside the exemption list for more than the time m, the agent will be removed from the exemption list. Third, if the number of agents inside the exemption list is more than the exemption list capacity, regulators will remove some agents staying inside the exemption list for the longest time to make sure y (t) = k. To facilitate access to the explanation, we summarize the main parameters of the HPS mechanism in Table 1. Taking into account factors such as the exemption list capacity, the observation period, and the removal time, we draw a simplified flowchart to depict the evolution process of the exemption list under the HPS mechanism at a discrete time, shown in Fig. 1.
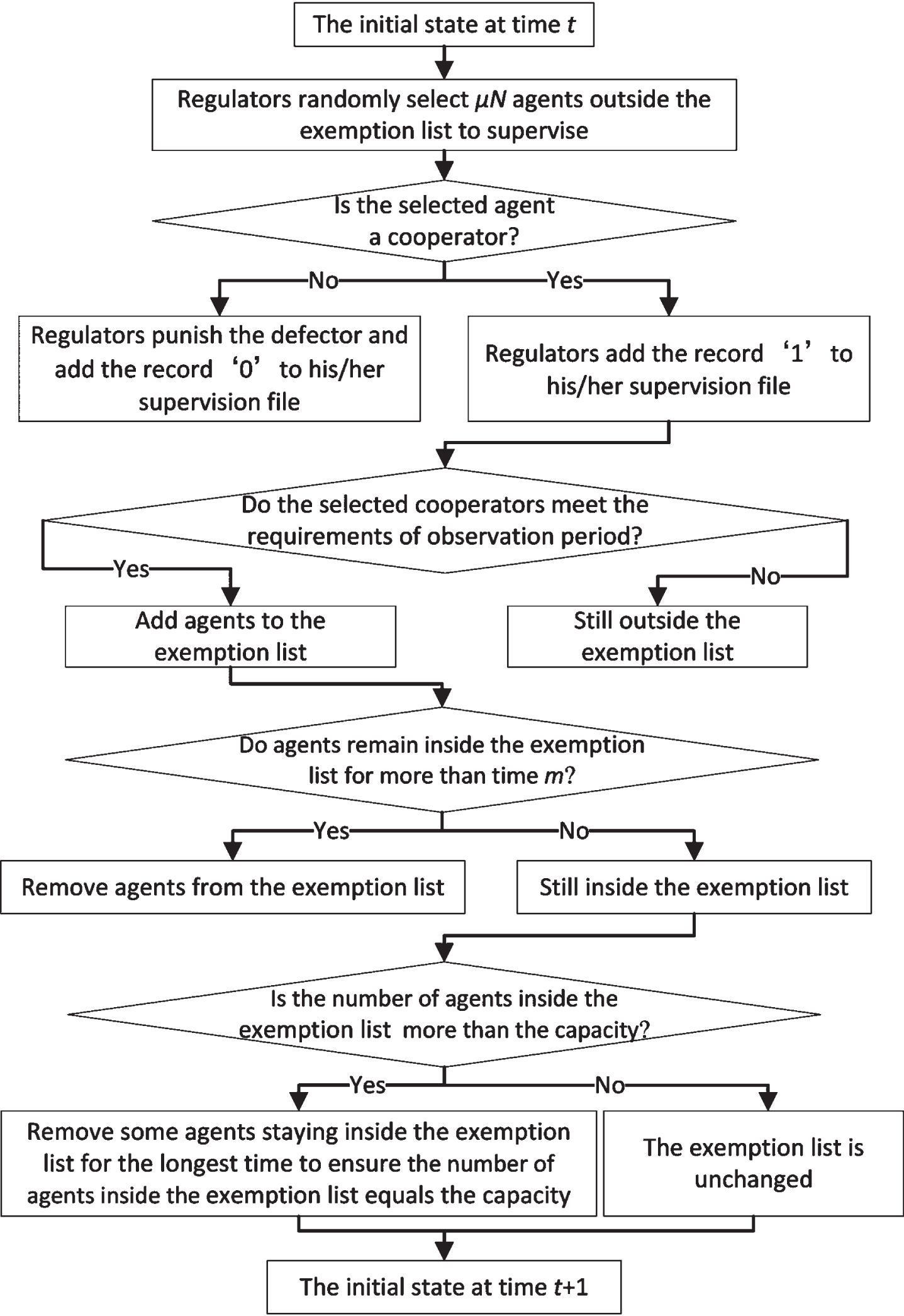
The dynamic evolution process of the exemption list. At each discrete time, regulators need to adjust the exemption list, mainly including three steps: (i) add agents who meet the conditions to the exemption list, (ii) remove agents who exceed the limits of the removal time from the exemption list, (iii) if the number of agents is more than the exemption list capacity, remove some agents staying a long time to ensure the number of agents equals the exemption list capacity.
The list of main parameters of the supervision mechanisms
Initialization setting
The following numerical simulation steps can describe the PGGs under the HPS mechanism:
Based on relevant references [24, 44], the parameters are set as follows unless specifically stated: N = 1000 d = 4, c = 1, r = 4, τ = 2, σ = 0.1, α = 10, μ = 0.45, θ = 5, and m = 3. The values of supervision ability and exemption list capacity are set in the range of μ ∈ [0, 1] and k ∈ [0, (1 - μ) N]. All simulations are run for 10,000 steps (T = 10, 000), and the fraction of cooperators (F c ) is obtained by averaging the last 100 steps (T r = 100). Each data presented below is obtained by averaging 100 different realizations for each set of parameters. We use the JH Innovation Software, a computing service platpfom based on the Linux system, to obtain the results in Section 3.2 and 3.3.
Simulation results
To begin, we examine the simplest issue of cooperation under the ORS mechanism, for different supervision abilities and penalty values. Figure 2 illustrates the relationship between the fraction of cooperators, denoted as F c , and the parameter r. Obviously, F c increases from 0 to 1 as r increases no matter the values of μ and τ. Thus, a higher value of r is crucial in promoting agents’ cooperation. However, a comparison of the results for different μ and τ shows that these parameters have a considerable impact on F c . A high supervision ability or a severe penalty can promote cooperation. For example, for μ = 0.4 and τ = 2, cooperators cannot emerge in the population until r = 3.5, whereas for μ = 0.4 and τ = 4, F c equals 0.502 when r = 3.5. Similarly, for μ = 0.6 and τ = 4, F c increases from 0 to 1 in the range of r ∈ [2.0, 3.7]. However, for μ = 0.4 and τ = 4, F c reaches 1 when r = 4.9. Thus, the ORS mechanism can enhance the level of cooperation, especially when regulators strengthen their supervision and punishment measures.
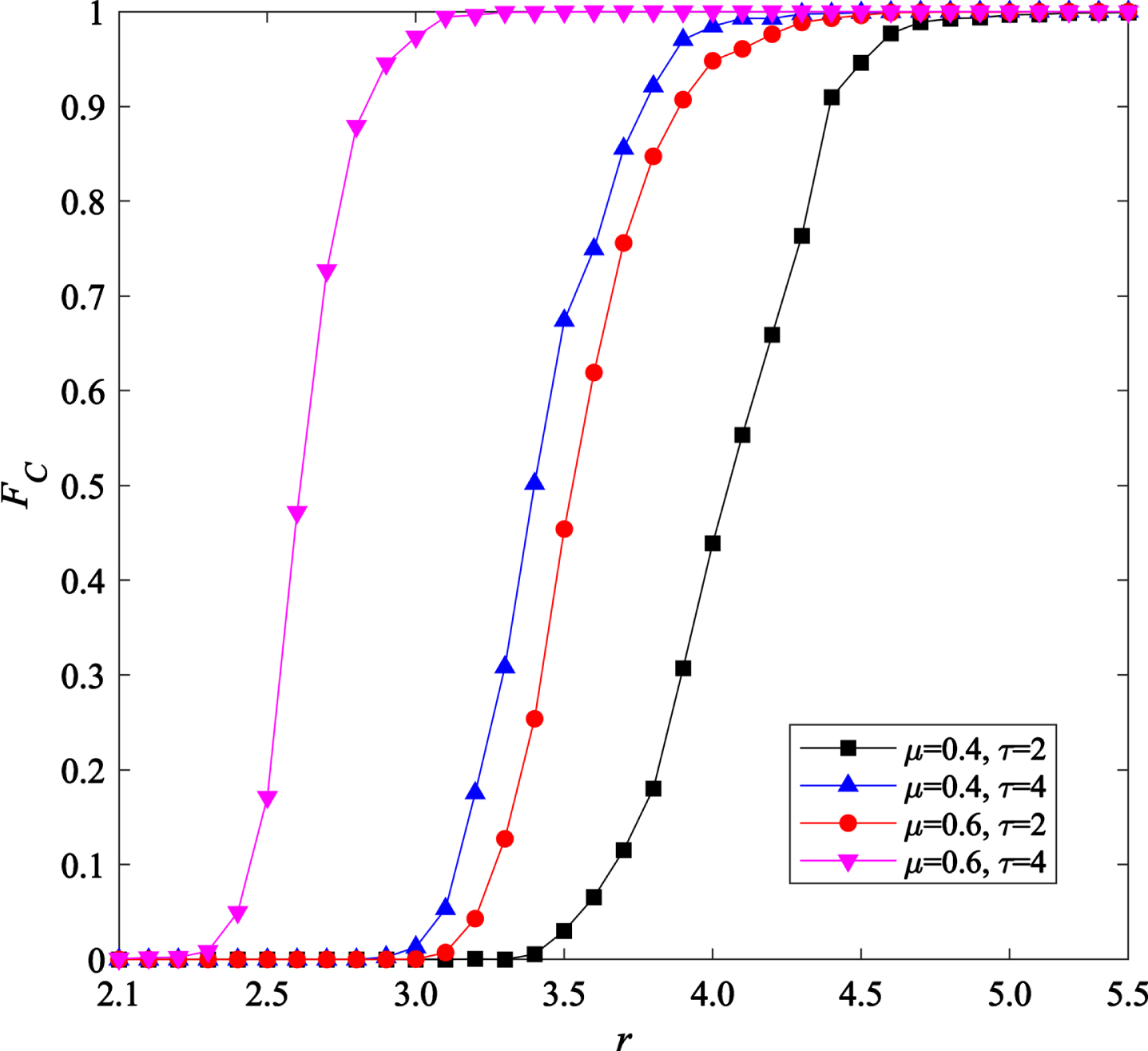
Fraction of cooperators F c as a function of the synergy factor r for different supervision abilities μ and penalty coefficient τ under the ORS mechanism.
To verify the impact of heterogeneous preferences on the strategy selections, we divide the population into four subpopulations based on the preference distribution and compare their behavioral differences under identical game conditions. As described in Fig. 3, the risk-averse subpopulations exhibit a higher cooperation level than the risk-seeking ones. Notably, when the risk preference distribution is more dispersed, the behavioral differences among four subpopulations are more pronounced, as observed when comparing Fig. 3 (a) and (b). Besides, there are differences in the evolution process among subpopulations, even when the evolution results are the same. Figure 4 (a) and (b) indicate that, with a high (or low) synergy factor, risk-averse subpopulations converge to cooperative (or defective) strategies more rapidly (or slowly) than their risk-seeking counterparts. Thus, there are significant behavioral differences among agents having heterogeneous preferences.
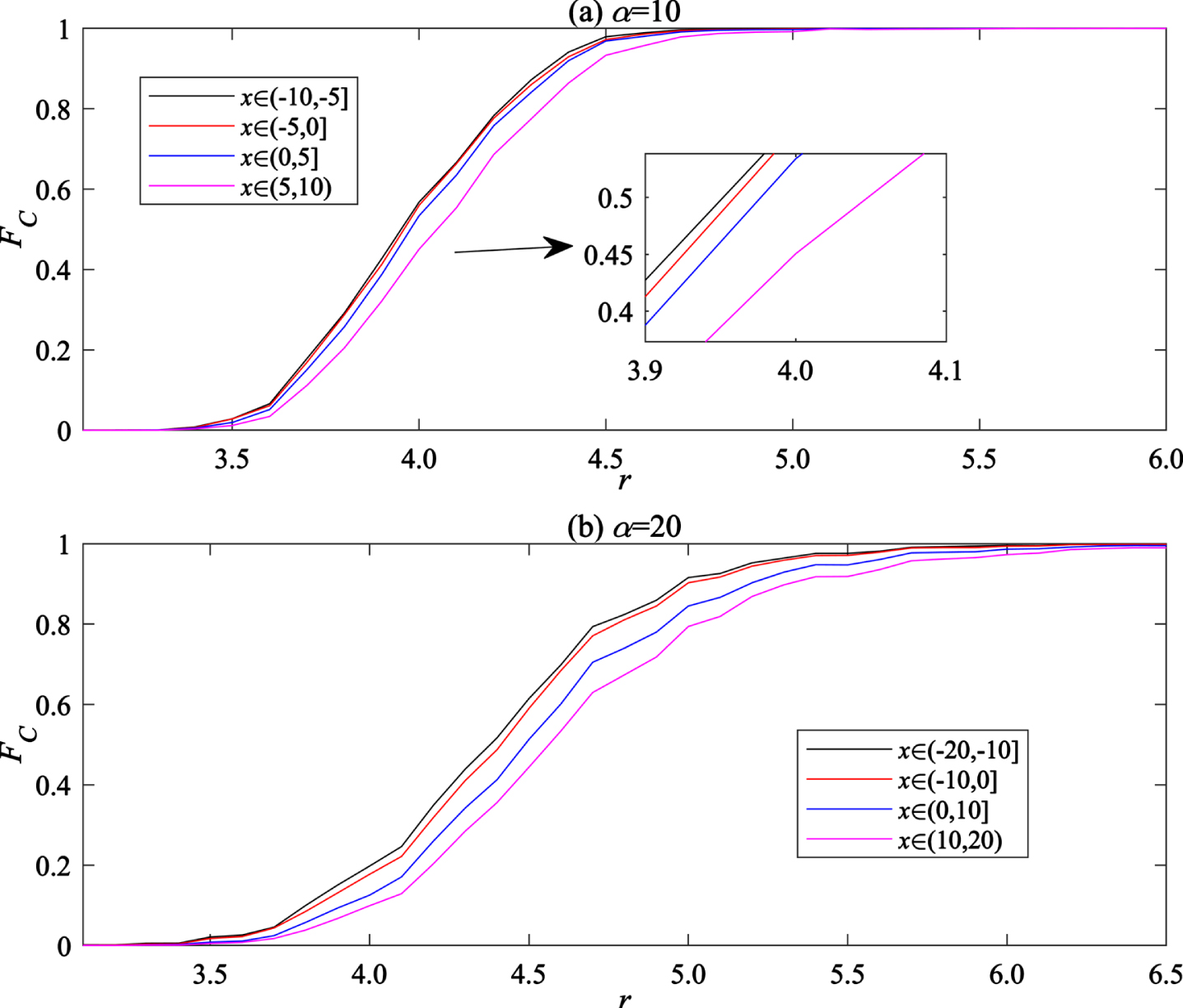
Fraction of cooperators F c as a function of the synergy factor r for four subpopulations having different preferences. (a) α = 10, and (b) α = 20.
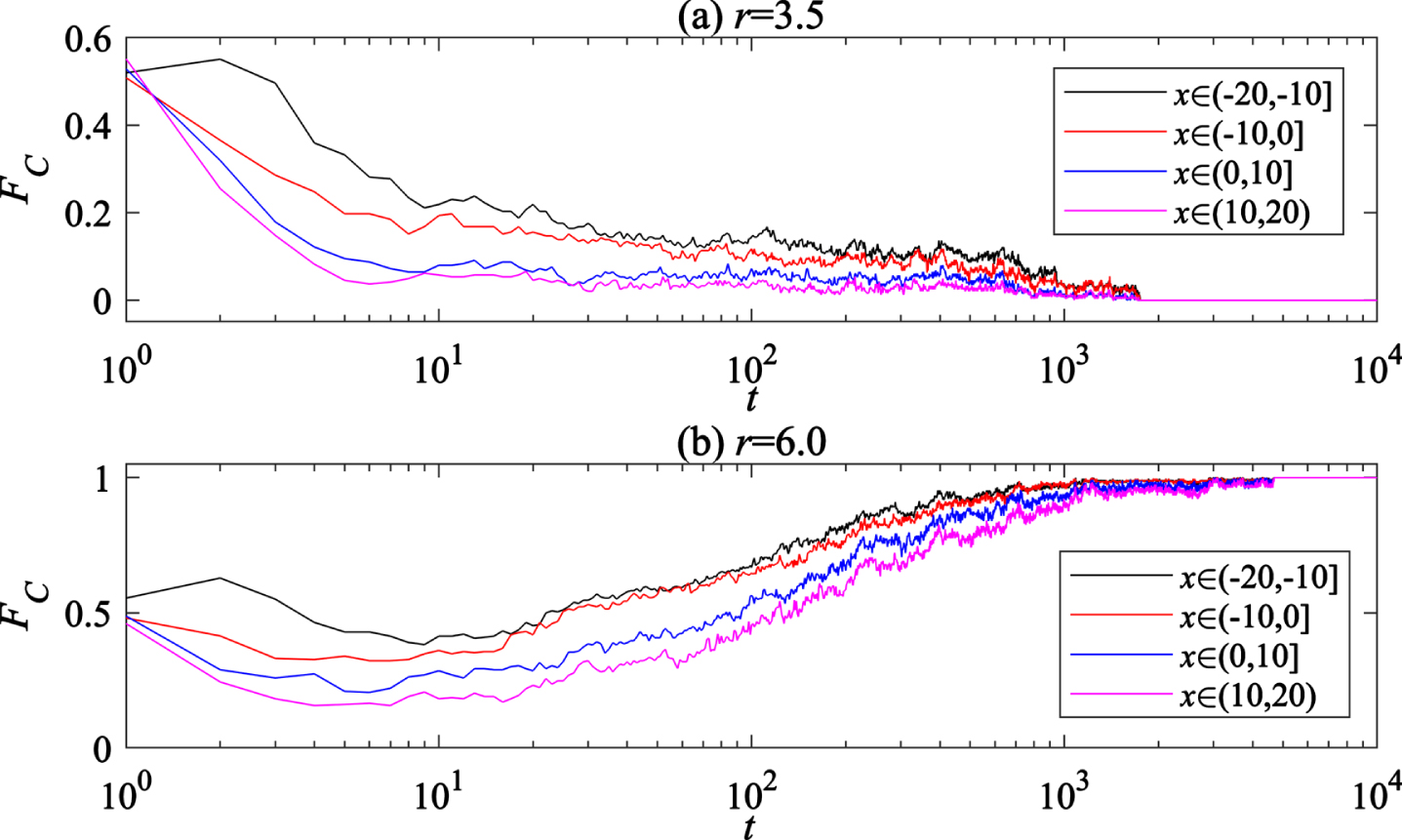
Fraction of cooperators F c as a function of time t for four subpopulations having different preferences. (a) r = 3.5, and (b) r = 6.0.
Having examined the impact of heterogeneous preferences on strategy selection, we proceed to assess the effectiveness of the HPS mechanism. The supervision ability and exemption list capacity are essential variables for the HPS mechanism. In order to verify the effect of the HPS mechanism, we record the F c for different supervision abilities and exemption list capacities, as shown in Fig. 5. First, it is clear that a higher supervision ability can enhance the effect of cooperation under both the ORS mechanism and the HPS mechanism. Second, the HPS mechanism outperforms the ORS mechanism, as evident from the higher value of F c . For example, for μ = 0.50 and k = 0, F c equals 0.724, whereas for μ = 0.50 and k = 500, F c reaches 0.890. Third, the exemption list capacity influences the results under the HPS mechanism. F c has an upward trend with the increase in k. For example, for μ = 0.45, in the case of k = 50, 300, and 550, the fractions of cooperators are 0.539, 0.618, and 0.683, respectively. Thus, a larger exemption list capacity is conducive to cooperation among agents.

Fraction of cooperators F c as a function of the supervision ability μ and exemption list capacity k. The black and yellow sectors represent the fraction of cooperators and defectors.
To investigate the impact of the observation period θ on agents’ strategy selection and cooperation, we consider two cases: a shorter and longer observation period. Figure 6 shows the results for a shorter observation period. It is observed that F c increases as θ increases regardless of the value of k. For example, when k = 500, F c increases from 0.222 to 0.862 in the range of θ ∈ [1, 30]. Thus, a moderately long observation period leads to a high level of cooperation. However, F c only changes significantly in the range of θ ∈ [1, 15] and is not sensitive to the observation period in the range of θ ∈ [16, 30]. For k = 200, the fractions of cooperators in the cases of θ = 16 and 30 are 0.716 and 0.680, respectively. Thus, regulators do not need to set an overly long observation period.
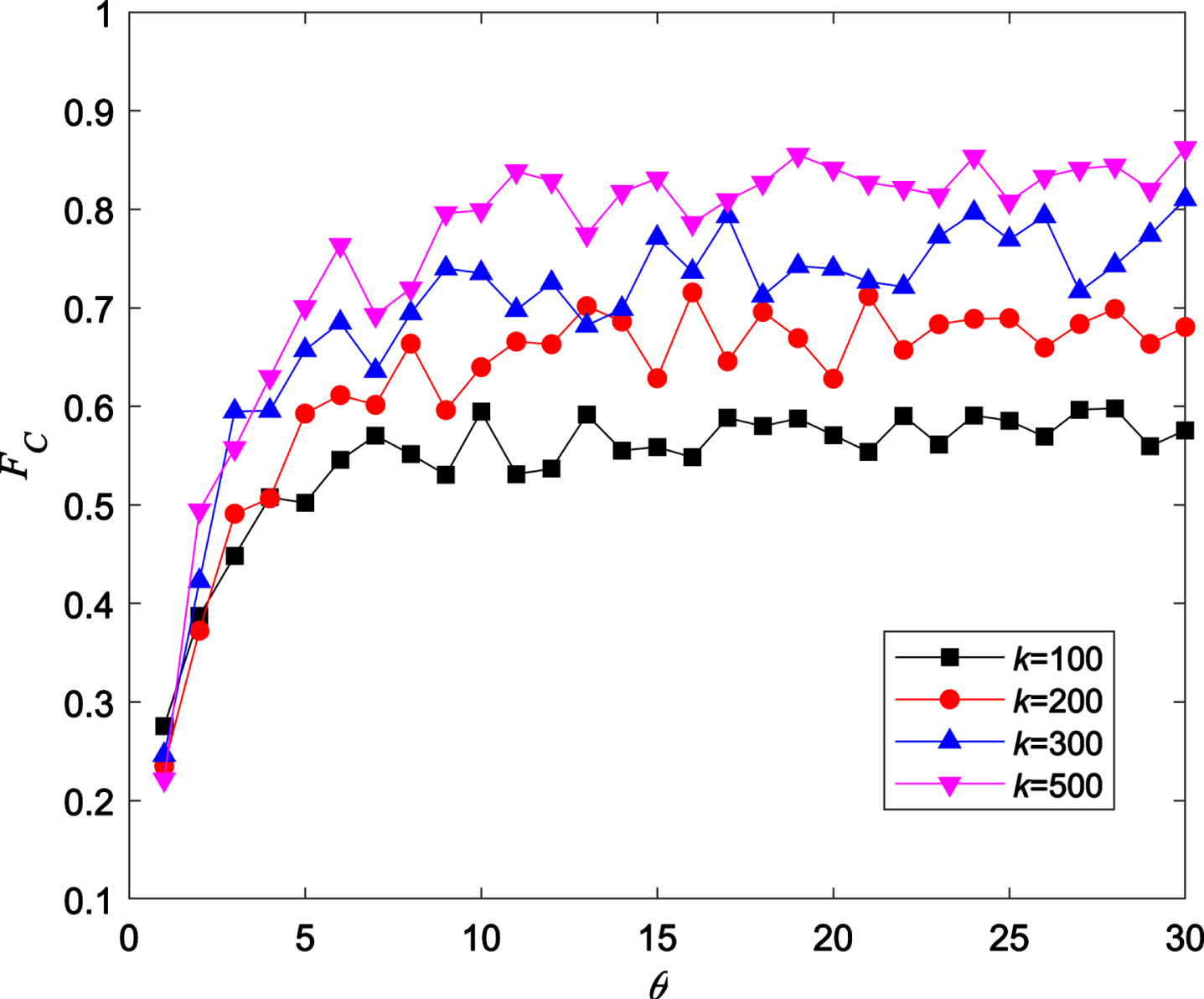
Fraction of cooperators F c as a function of the shorter observation period θ for the supervision ability μ = 0.45.
Figure 7 presents the results for a longer observation period. It can be observed that F c shows a decreasing trend in the range of θ ∈ [100, 3700]. This is due to the fact that the exemption list’s effectiveness gradually declines as the observation period gets longer, resulting in fewer agents meeting the conditions for entering the list. If θ continues to increase, F c decreases to approximately 0.52 and remains relatively stable. The stable F c is similar to the one under the ORS mechanism. Therefore, setting a too-long observation period will render the HPS mechanism ineffective.
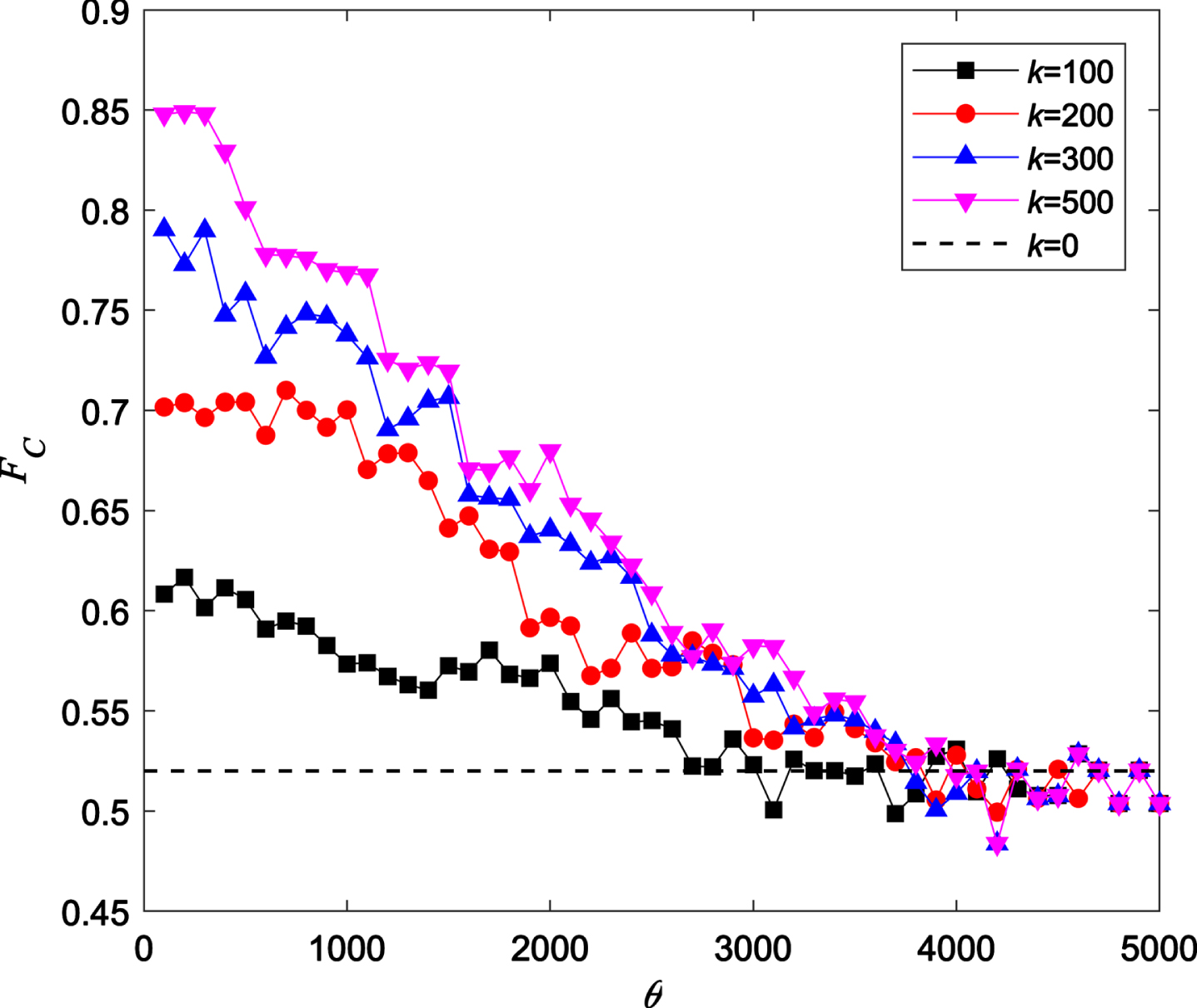
Fraction of cooperators F c as a function of the longer observation period θ for the supervision ability μ = 0.45.
The removal time can affect the dynamic adjustment, which can result in changes to the level of cooperation. Figure 8 presents the fraction of cooperators F c as a function of the removal time m for different exemption list capacities. On the one hand, we observe that a short removal time leads to a high level of cooperation. F c decreases with the increase in m. Agents staying inside the exemption list for a long time may find they have escaped regulators’ supervision and become defectors. Thus, for a long removal time, F c decreases significantly. On the other hand, for different exemption list capacities, the sensitivities of F c to the change of m are heterogeneous. For a shorter removal time, a larger k leads to a higher F c . However, for a longer removal time, F c for a smaller k is higher. As m increases, F c for a larger k decreases sharply.
In addition, we investigated the impact of different risk preference distributions on the HPS mechanism. Figure 9 shows the fraction of cooperators as a function of r for different distributions of risk preference under ORS and HPS mechanisms. We can observe that the lines under ORS and HPS mechanisms almost overlap if α = 5. This suggests that regulators hardly distinguish agents’ preferences when the behavioral differences among agents are not noticeable, resulting in similar cooperation levels under both mechanisms. However, if the distribution of risk preference is more dispersed, the cooperation levels under the two mechanisms differ significantly. Specifically, if r is low, the ORS mechanism leads to a higher F c compared with the HPS mechanism. However, F c under the HPS mechanism is higher than the one under the ORS mechanism if r is high. For example, for α = 10, F c is higher under the HPS mechanism if r ⩾ 3.7, indicating that the HPS mechanism is more effective when the synergy factor is high. Thus, the HPS mechanism is effective if the synergy factor is high. On the whole, regulators need to combine a high synergy factor with the HPS mechanism to achieve a high level of cooperation.

Fraction of cooperators F c as a function of the removal time m for the supervision ability μ = 0.45.
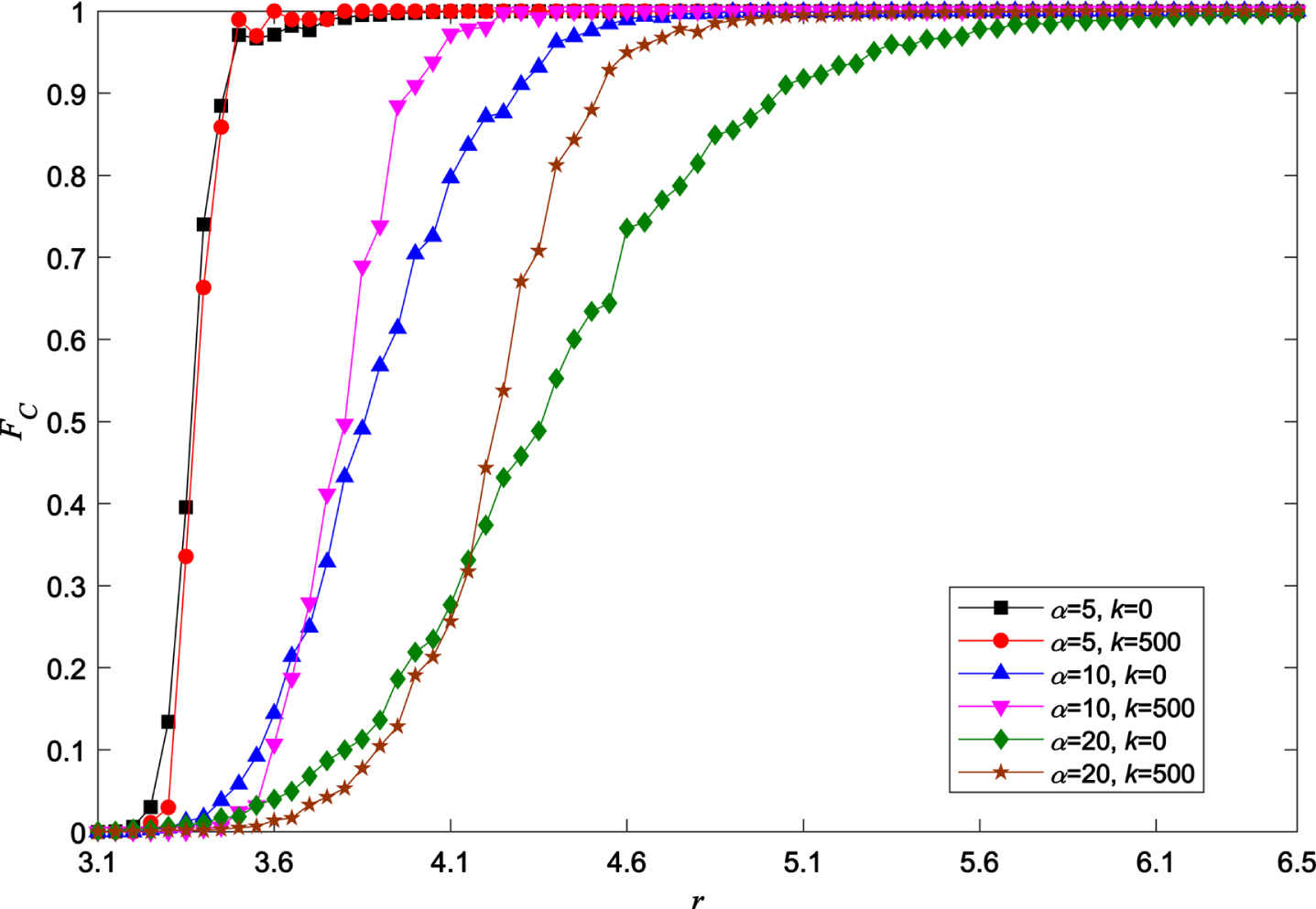
Fraction of cooperators F c as a function of r for different distributions α of risk preference under ORS and HPS mechanisms.
To investigate how the HPS mechanism enhances cooperation, we compare the fractions of cooperators inside and outside the exemption list in Fig. 10. We can find that F c increases as r increases both inside and outside the exemption list. Moreover, the dispersed distribution of risk preference leads to the decline of F c both inside and outside the exemption list. Thus, the changing trends of F c inside and outside the exemption list are similar. However, F c inside the exemption list is considerably higher than the one outside the exemption list, especially when r is low. Regulators add cooperators to the exemption list and use the limited supervision ability to supervise the agents outside the exemption list. Thus, regulators can find and punish the defectors to improve the level of cooperation.
We also observe that the effect of the exemption list capacity k is influenced by r, as shown in Fig. 10. First, for a lower r, a smaller k can result in a higher F c than a larger k outside the exemption list. As r increases, a larger k leads to a higher cooperation level. For example, in the case of α = 20 in Fig. 10 (a), if r ⩽ 4.5, F c for k = 50 is higher than that for k = 500. However, if r > 4.5, F c for k = 50 is higher. Second, the exemption list capacity also affects the cooperation level inside the exemption list. Increasing the exemption list capacity can weaken the dynamics of the adjustment inside the exemption list, causing cooperators who remain inside for a long time to become defectors. Thus, we can see that F c is higher when k is small in Fig. 10 (b).

Fractions of cooperators F c inside and outside the exemption list as a function of the synergy factor r for different exemption list capacities k and distributions α of risk preference. (a) F c inside the exemption list, and (b) F c outside the exemption list.
To verify whether regulators can accurately identify the preference differences among agents under the HPS mechanism, we further explore the regulators’ judgment accuracy φ as a function of synergy factor r for different exemption list capacities k and distributions of risk preference α in Fig. 11. First, the behavioral differences among agents are significant if the distribution of risk preference is dispersed. Thus, regulators can judge agents’ risk preferences more accurately. Second, φ has a downward trend as r increases. When r is small, only some RA agents adopt strategy C. Thus, regulators can identify agents’ preferences simply in this case. As r increases, cooperators increase in both RA and RS subpopulations, resulting in the decline in judgment accuracy. If r is large enough, all agents evolve into cooperators. The same strategy among agents makes it impossible for regulators to distinguish agents’ risk preferences, so φ = 0.50. Third, a large exemption list capacity leads to a decline in judgment accuracy in most cases. Two reasons cause this result: (1) A larger exemption list capacity leads to a higher cooperation level, so the behaviors of RA and RS agents are not remarkably different. (2) The number of RA agents is unchanged, so the probability that RS agents are added to the exemption list increases if the exemption list capacity is large. To sum up, improving the cooperation rate reduces the behavioral difference among agents, resulting in a declining trend in judgment accuracy under the HPS mechanism.

Judgment accuracy φ that regulators judge agents’ risk preferences as a function of the synergy factor r for different exemption list capacities k and distributions α of risk preference.
Social network structures affect behavioral dynamics, leading to differences in the evolution of cooperation [45]. In this study, we examine the robustness of our previous findings by considering different network structures. Classic network structures include the Barabási-Albert (BA) scale-free network [46] and the Watts-Strogatz (WS) small-world network [47], which can be found on many real-world networks. We introduce the above two networks to depict the relationship among agents. As depicted in Fig. 12, the results of the HPS mechanism are better than those of the ORS mechanism, whether the population structure follows the scale-free or small-world network. Thus, in the case of common network structures, the HPS mechanism can promote cooperation more than the ORS mechanism.
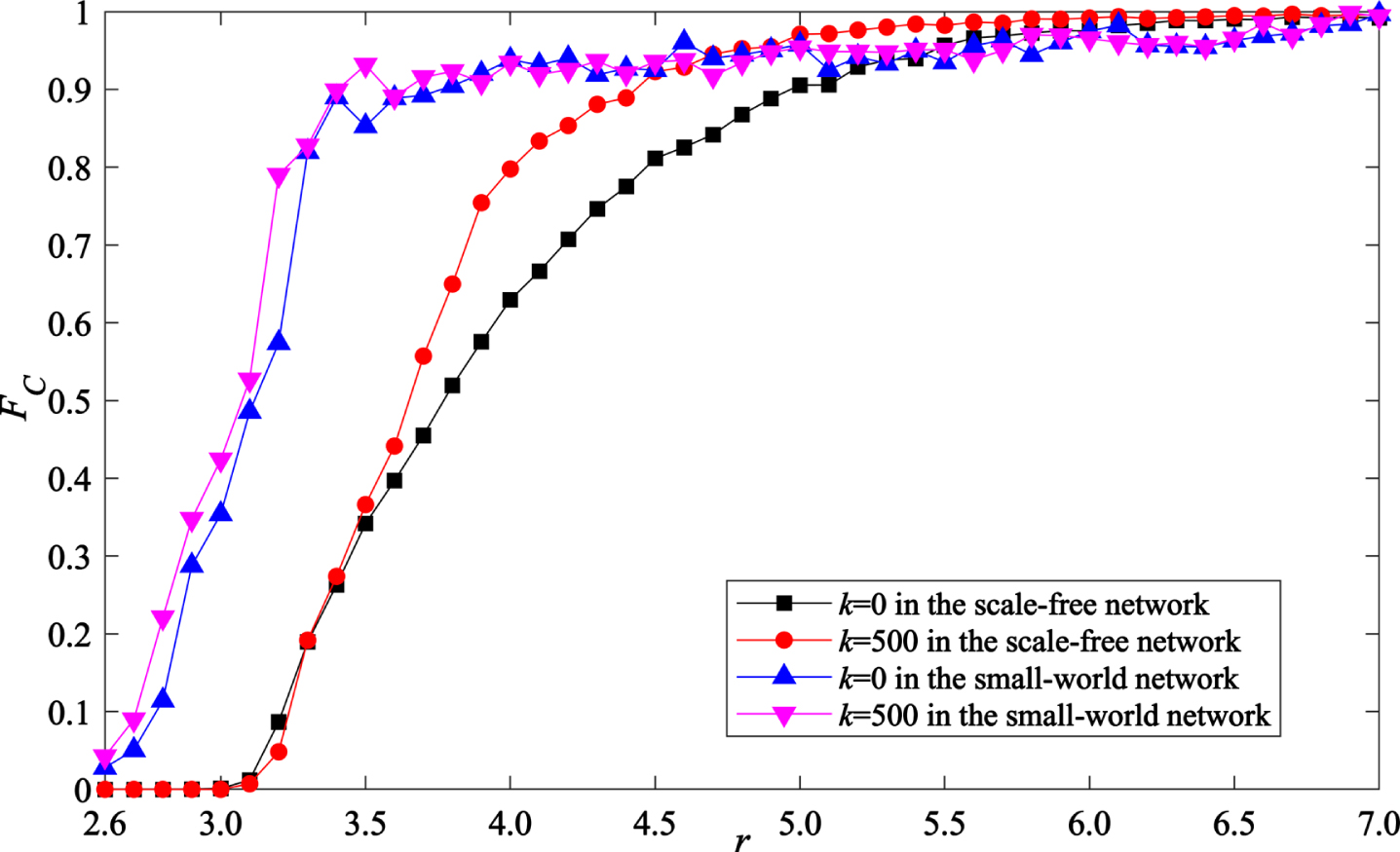
Fractions of cooperators F c in the small-world network and scale-free network as a function of synergy factor r under the mechanisms of ORS (k = 0) and HPS (k = 500).
To verify the practical significance of the HPS mechanism, we introduce a case study of market regulation in Hunan Province, China. As a regulator, the Administration for Market Regulation of Hunan Province conducts random inspections of enterprises in its jurisdiction to maintain market order. During the inspection process, the regulator adopts the random principle, which means that the supervised enterprises are randomly selected. The random inspection is consistent with our definition of random supervision under limited supervision ability. According to the 2023 inspection plan [48], the inspection rate, namely the supervision ability, ranges from 0.19% to 100%. Among them, 10%, 30%, 60%, and 100% are common supervision abilities. As there is no difference between the ORS mechanism and the HPS mechanism if the supervision ability is 100%, it is not discussed.
In terms of fines, there is a provision as follows: if an enterprise has violated the law and its payoff is between 100,000 and 500,000 yuan, the fine will be between 100,000 and 200,000 yuan depending on the severity of the situation [49]. We take the average of the above data, which means that a defector with a payoff of 300,000 yuan will be fined 150,000 yuan. The punishment amount is half of the payoff. Therefore, we assume that if agent i with a payoff of m i is a defector under supervision, the fine amount will be 0.5m i .
A brief analysis of the effectiveness of the HPS mechanism in three common situations (μ = 0.1, 0.3, and 0.6) is presented. According to the results in Section 3.2, setting a larger exemption list capacity is beneficial in improving the cooperation level. Thus, corresponding to the above three situations, we select k = 900, 700, and 300 as the cases of study, respectively. Figure 13 compares the results of the ORS mechanism with the HPS mechanism for the three common situations. On the one hand, the cooperation rate is higher under the HPS mechanism in most cases, especially when r is larger. As r grows, the cooperation rate under the HPS mechanism rises more rapidly. On the other hand, compared with the ORS mechanism, the cooperation rate under the HPS mechanism reaches 1 earlier. For example, when μ = 0.3, the corresponding value of r for the ORS mechanism and the HPS mechanism that makes the cooperation rate 1 is 5.0 and 4.1, respectively. Thus, in the application of practical situations, the HPS mechanism can also achieve the effect of promoting cooperation.
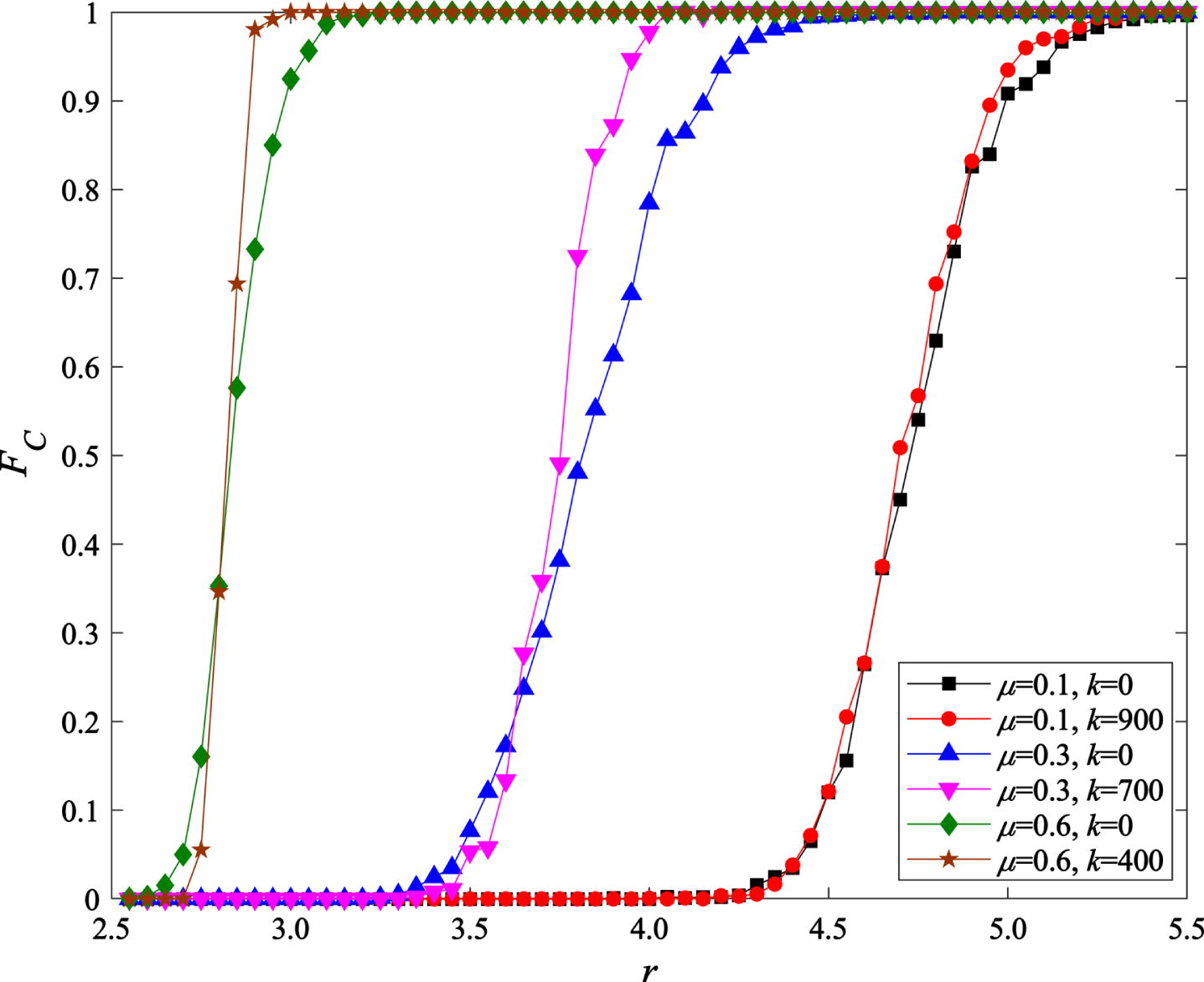
Comparison of the cooperation rate under the ORS mechanism and the HPS mechanism considering the common inspection rate and penalty method of the Administration for Market Regulation
To summarize, we have proposed a new supervision (HPS) mechanism based on behavioral differences considering limited supervision ability and heterogeneous risk preferences among agents. This paper introduces the concept of the exemption list under the HPS mechanism, including variables such as exemption list capacity, observation period, and removal time. Then, we investigated the effects of the HPS mechanism on the evolution of cooperation in the spatial public goods game.
Our simulation results reveal that the HPS mechanism can significantly improve cooperation among agents compared with the original random supervision (ORS) mechanism, especially when the synergy factor is higher. Second, a larger exemption list capacity leads to a higher fraction of cooperators. Third, particularly short or long observation periods cause a decline in the level of cooperation. Fourth, shortening the removal time can increase the dynamics of the exemption list, which is conducive to improving the level of cooperation. Besides, regulators can more accurately distinguish agents’ preferences if the behavioral difference between heterogeneous agents is significant. Therefore, regulators can use the limited ability to supervise and punish more potential defectors, thereby improving cooperation.
In this work, we assume that agents’ risk preferences are unchanged. However, in reality, the decision-making environment surrounding them, such as the atmosphere of cooperation, supervision ability, and intensity of punishment, may change agents’ preferences. Several scholars have studied preference evolution from different perspectives based on the theory of opinion dynamics [43, 44]. The preference evolution brings a challenge to regulators’ supervision. Our future work will focus on public cooperation supervision in the context of the co-evolution of strategies and preferences, which is a crucial area of research.
Footnotes
Acknowledgments
This work was jointly supported by National Natural Science Foundation of China (71672145 and 72171195).