
Abstract
The variable universe fuzzy controller can realize the continuous control of the whole operation process of the independent metering control excavator, which significantly improves the operation performance and energy saving. However, VUFC fuzzy rules are designed according to expert experience and debugging many times. VUFC design process lacks of effective design methods, and has great randomness. The optimal state of VUFC fuzzy rules and relevant parameters such as universe cannot be ensured. Artificial neural network is a parallel distributed system, which overcomes the defects of traditional artificial intelligence based on logical symbols in processing intuitive and unstructured information. It also has the advantages of self-adaptation, self-organization and real-time learning. In this paper, the neural network learning algorithm is introduced into the fuzzy inference system to optimize the structure and parameters of the fuzzy controller. ANFIS is trained according to the input and output data of the system to obtain a fuzzy controller. Compared to traditional fuzzy controller, ANFIS can reduce the influence of subjective factors in the design process on the controller. Through the simulation model of 37-ton IMC excavator, the ANFIS controller is verified to have better control performance than VUFC. In the process of lifting and lowering the boom, the ANFIS controller has a more stable running speed, significantly reduces pressure and flow fluctuation amplitude.
Keywords
Introduction
Excavators have the advantages of high-power density, strong bearing capacity and flexible operation. They are widely used in earth-moving excavation, ore mining, rescue and other harsh environment [1]. The application of independent metering control (IMC) system to the excavator can realize the decoupling of the mechanical structure and function of the traditional slide valve. It reduces the system throttling energy loss [2, 3]. The working environment of IMC excavators are complex and changeable, requiring frequent switching between different control modes, which will lead to fluctuations of actuator operating speed and system pressure [4, 5].

Different forms of IMC systems.
Xu [4] used Lyapunov theory to calculate the optimal dwell time, and based on the bidirectional potential loop to achieve smooth switching between different working modes. Linjama. M [6] and Huova. M [7] used ramp signals to control the valve so that the valve core moved gently to cope with unexpected changes in operating process, but this can reduce the dynamic performance of the system. Most of the control strategies designed by scholars in the past are discrete control methods. So it is of great significance to develop an algorithm that can control the excavator continuously in the working cycle without distinguishing the working modes. A. Shenouda [8] strictly controlled the action time sequence of 4-valve switching, and realized continuous control of 4-valve IMC system through coordinated action of four valves. This method is only applicable to specific IMC system. Hu [9] used variable universe fuzzy controller (VUFC) to realize continuous control of dual-valve IMC system, which improved the problem of pressure and velocity fluctuation during working and significantly improved the operational performance of the excavator. Wu [10] designed the P-Fuzzy PID control strategy and applied it to the traditional valve-controlled cylinder system. It proved through experiments that the proportional fuzzy PID controller could not only effectively adapt to the changes of system parameters, but also improved the response speed of the system. Yang [11] designed Fuzzy-PID control strategy, which has been proved through simulation and test that the control strategy was insensitive to the change of parameters of IMC hydraulic system, showing good adaptability and robustness. The hydraulic system especially IMC system has strong nonlinear characteristics, so it is difficult to establish accurate mathematical model. The fuzzy controller has the advantages of strong robustness and does not require the precise model of the controlled object, which can significantly improve the performance of the hydraulic system. However, the internal structure and parameters of the fuzzy controller are designed according to the experience of experts, which has great subjectivity and cannot be guaranteed to be the optimal state.
In literature [12–16], ANFIS was used to optimize control system response parameters such as overshoot, undershoot, rise time, recovery time and steady-state error of the motor control strategy, which significantly improved the working performance of the motor. Inspired by the research achievements of the above scholars, this paper used the adaptive ability and self-learning ability of neural network to adjust the internal parameters of fuzzy controller. It overcame the subjective defects based on expert experience and multiple debugging in the design process of VUFC [9]. Through the simulation model of 37-ton IMC excavator, it is verified that ANFIS controller significantly improves the performance of the hydraulic system of IMC excavator. It also improved the response speed and displacement tracking accuracy of the hydraulic cylinder, reduced the fluctuation of pressure and speed during operation, and improved the operation performance of the whole machine.
The rest of this article is structured as follows: In Section 2, Problems of VUFC application in IMC excavator. In Section 3, ANFIS control strategy is designed. In Section 4, The performance of ANFIS controller is verified by simulation test. In Section 5, Conclusions and next steps are given.
The control object of this paper is 37-ton IMC hydraulic excavator, as shown in Fig. 2. The figure details the boom IMC system, which is supported by two synchronous hydraulic cylinders. According to the actuator displacement feedback deviation, the valve control signal is corrected, and the hydraulic cylinder trajectory is accurately tracked. In this paper, the performance of ANFIS control strategy for boom cylinder is verified to be superior by simulation test.
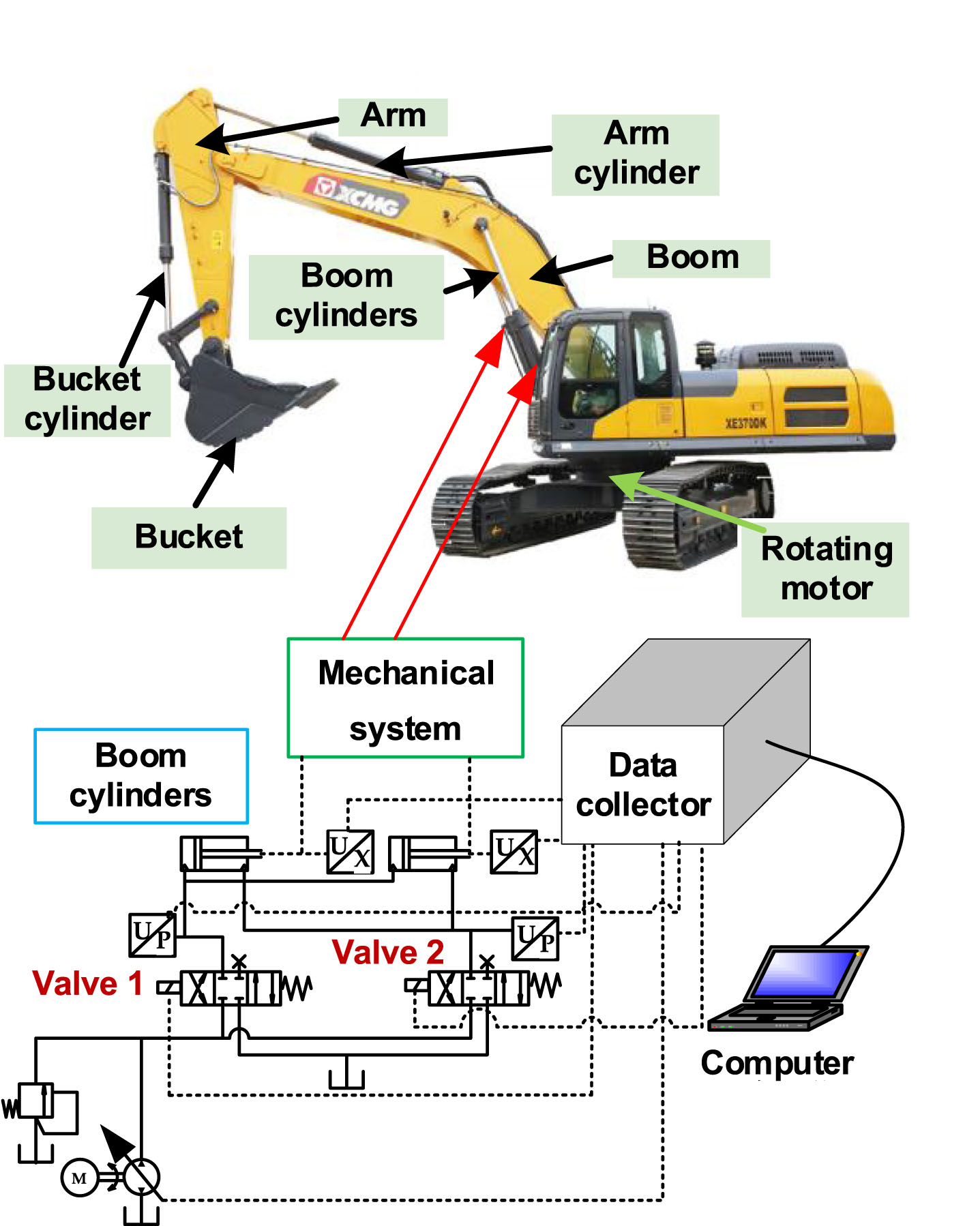
37t excavator boom IMC hydraulic system.
The application of VUFC to IMC excavator in literature [9] realized the continuous control of the whole working cycle of the actuator. However, there is no standard scientific method in the design process of the fuzzy controller. The fuzzy control mapping relationship in Fig. 3 is based on expert experience, and the simulation debugging of the fuzzy controller, which is too subjective. The internal structure and parameters of the designed VUFC cannot be guaranteed to be optimal.

Mapping relationship between input variables and output variables of VUFC.
In this paper, the nonlinear mapping ability, powerful data information processing ability, adaptive ability, self-adjustment and self-learning ability of neural network are used to improve fuzzy knowledge base. Based on Neural-fuzzy inference system, VUFC has been optimized. The performance of the ANFIS controller is verified by simulation model test.
VUFC has a certain adaptive ability, but the design of fuzzy rules based on expert experience has so much subjectivity and randomness. The fuzzy controller does not have the learning ability, which has certain defects in the process of realizing control of IMC excavator. Based on ANFIS, this paper optimized the design of VUFC in literature [9]. ANFIS solved the shortcoming of traditional fuzzy controller design which relies on expert experience and debugging repeatedly to reduce control error. ANFIS controller optimized fuzzy rules adaptively through neural network training. ANFIS is based on the mature parameter learning method of neural network, that is, the BP algorithm or the hybrid algorithm of BP algorithm and least squares. The given input and output data were learned and fuzzy rules were extracted from the data set. ANFIS adjusted the structure and parameters of the fuzzy inference system during the learning process, and finally generated If-Then fuzzy rules base.
ANFIS structure design
ANFIS and fuzzy inference system have the similar structure, which is composed of 5 layers of network nodes. Figure 4 shows the proposed ANFIS model structure for IMC excavator.

Proposed ANFIS model structure for IMC excavator.
The first layer is the fuzzification layer, which calculates the membership degree of the input data x = [x1, x2, ⋯ , x
n
] T in the respective universe. The output of the first layer node is calculated by the following formula:

The membership function of A in the first layer is the Gaussian function, whose expression is as follows:

The Gaussian membership function is determined by the parameters {d i , σ i }.
The second layer implements the fuzzy set operation of the preceding part, usually using multiplication, whose output is the product of all signals, that is,
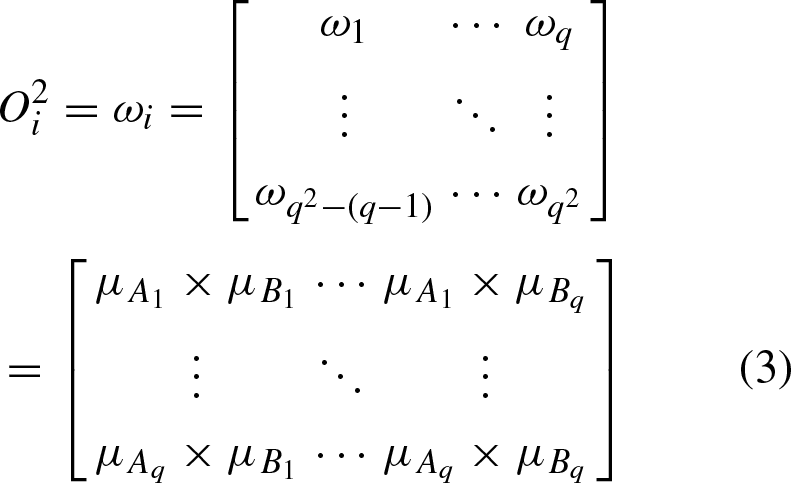
The output of each node represents the excitation intensity of a rule, and the node function has the function of “and” operation.
The third layer normalizes the application of each rule, and the ith node calculates the ratio of the incentive strength of rule i to the sum of the incentive strength of all rules:

The output of this layer is the normalized incentive strength.
The fourth layer is the defuzzification layer, which calculates the output of fuzzy rules. Each node is an adaptive node, and the node transfer function is a linear function, representing a local linear model, that is

Here, the set of parameters that consists of all of them is called the consequent parameters.
The fifth layer computes the sum of all rule outputs,
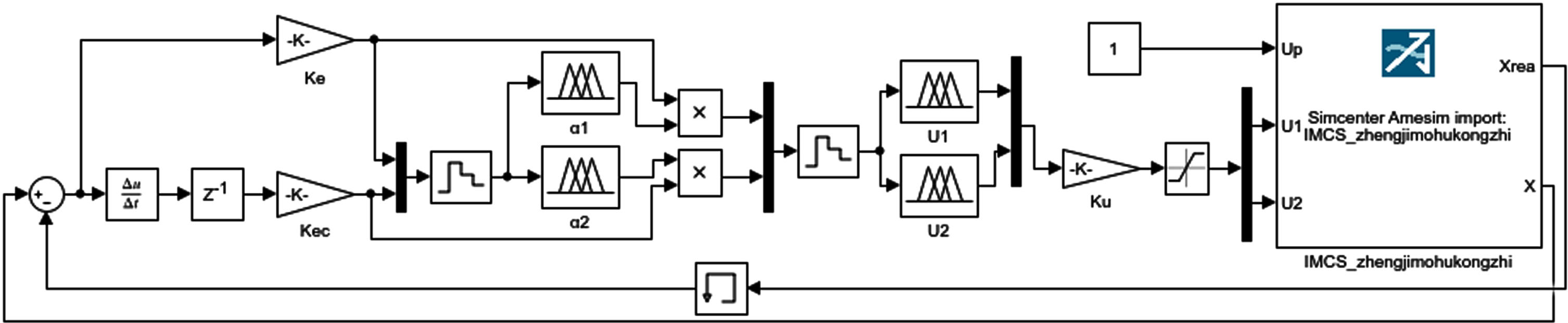
Through the above steps, an adaptive network equivalent to Sugeno fuzzy model was established. ANFIS was used to optimize VUFC, and the controller block diagram is shown in Fig. 5.

Optimized VUFC structure based on ANFIS.
This article used anfisedit graphical interface tool provided by MATLAB toolbox to train and test the collected VUFC running data, and finally generated Sugeno fuzzy inference system. The two layers of fuzzy controller in literature [9] are Mamdani type fuzzy reasoning systems with two inputs and two outputs. After optimizing it, ANFIS was used to generate four two-input-one-output Sugeno fuzzy reasoning systems. It is introduced in detail that α1 fuzzy inference system was generated by training. The design process of α2, U1 and U2 fuzzy inference system is the same.
Load data
The VUFC model was run for 500 seconds and 10 cycles of data were collected, of which 70% was used for training and 30% for testing. Input anfisedit in the MATLAB command window, enter the Neuro - Fuzzy Designer edit page. Load the training data (trndata.txt) and checking data (chedata. txt) respectively. Figure 6 shows the loaded data.
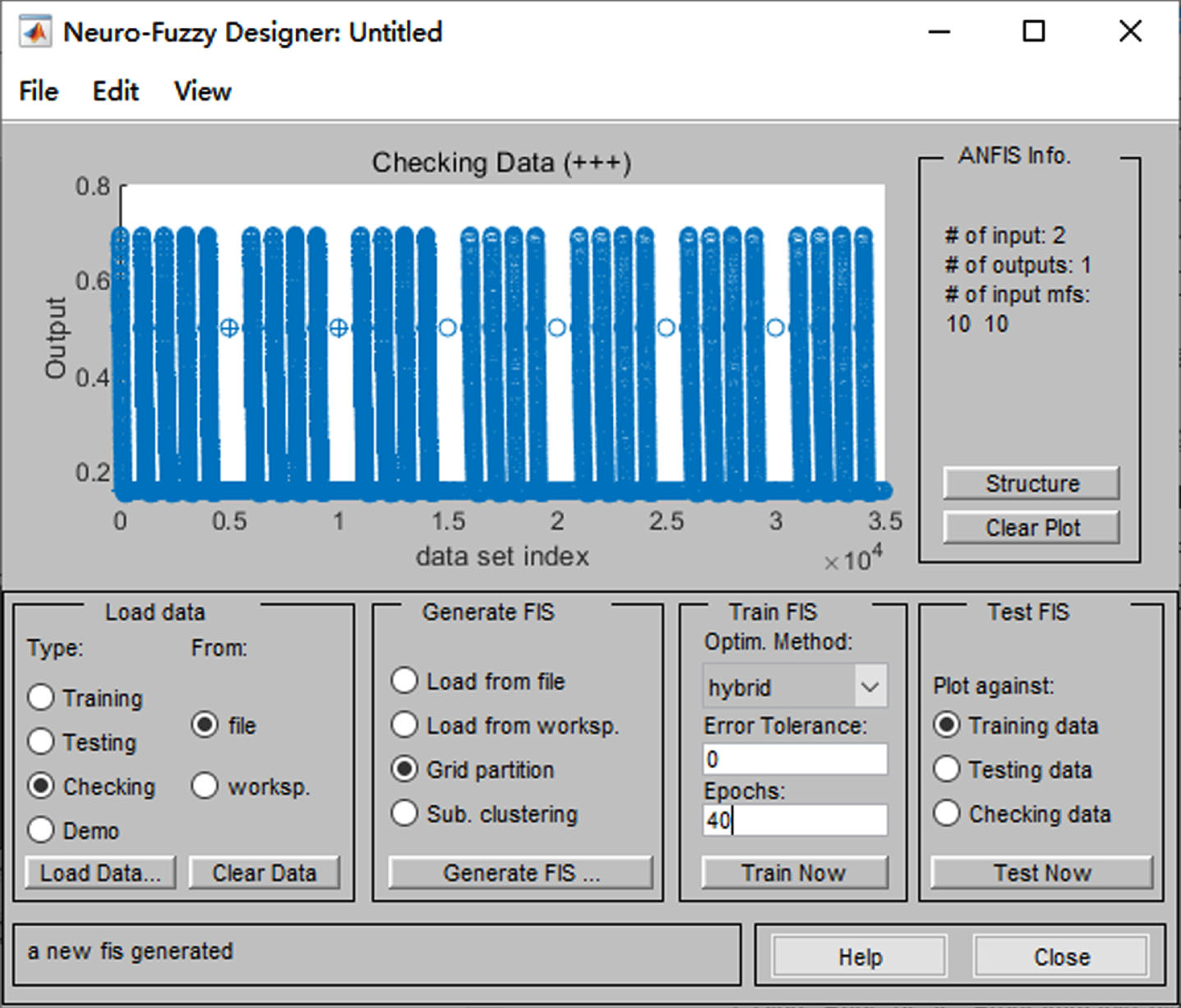
ANFIS interface after loading data.
It is necessary to design the basic structure of the membership function before starting the training. After a variety of different structure comparison, it is found that the structure control performance of the inference system in Fig. 7 is the best. The membership functions of the two input variables are Gaussian functions, the output membership function is constant and the number of rules is 10. The initial inference system is automatically generated by Grid partition.
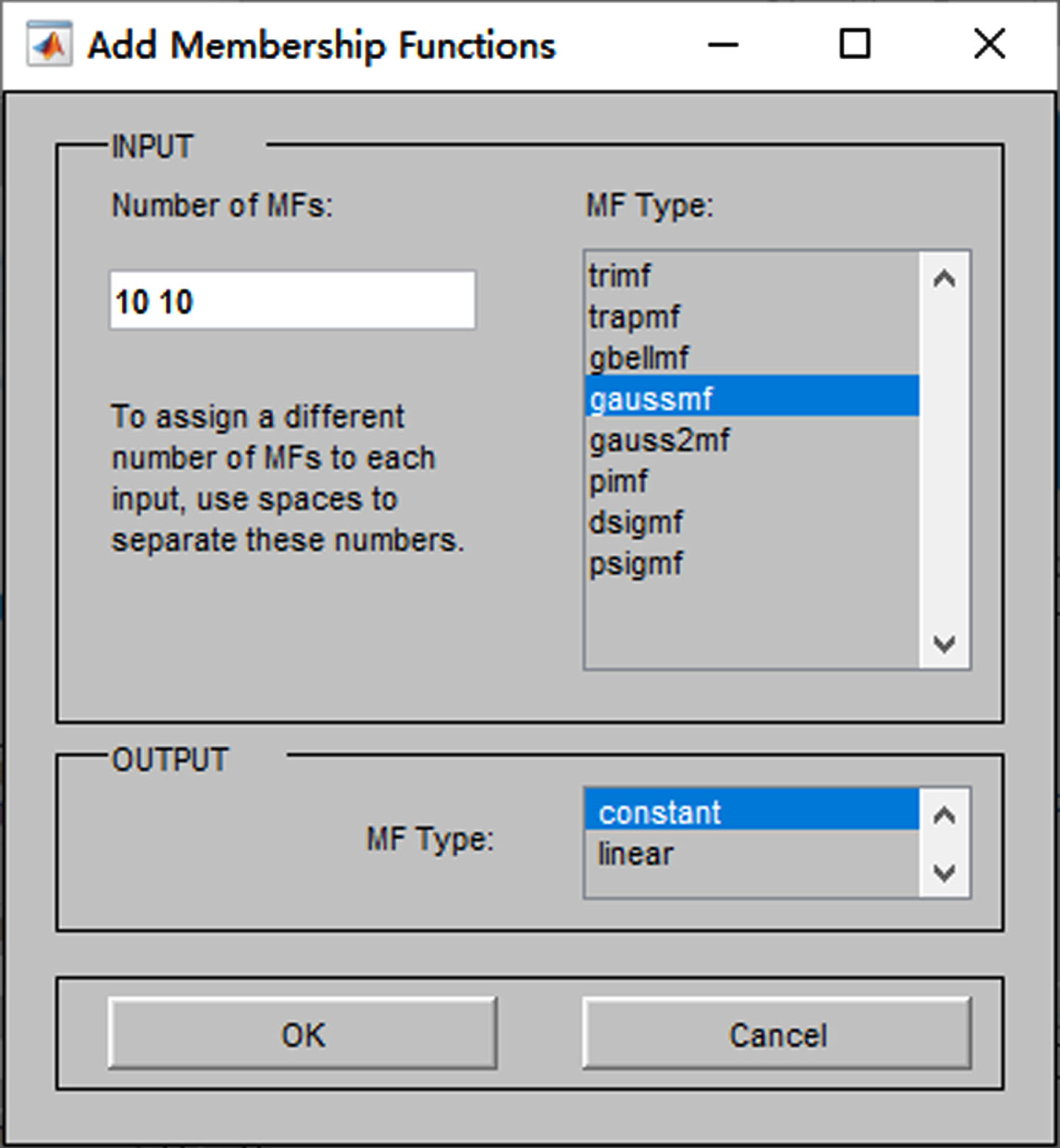
Membership function design interface.
Hybrid training algorithm was selected to adjust the designed initial reasoning system based on the loaded data. The optimized fuzzy reasoning system can better reflect the characteristics of the loaded data. Set the Error Tolerance to 0 and the maximum number of training times (Epochs) to 40, then click Train Now to train. The training error changes are shown in Fig. 8. The training error ended up being 0.0086589. The FIS system after training was saved as α1.fis.
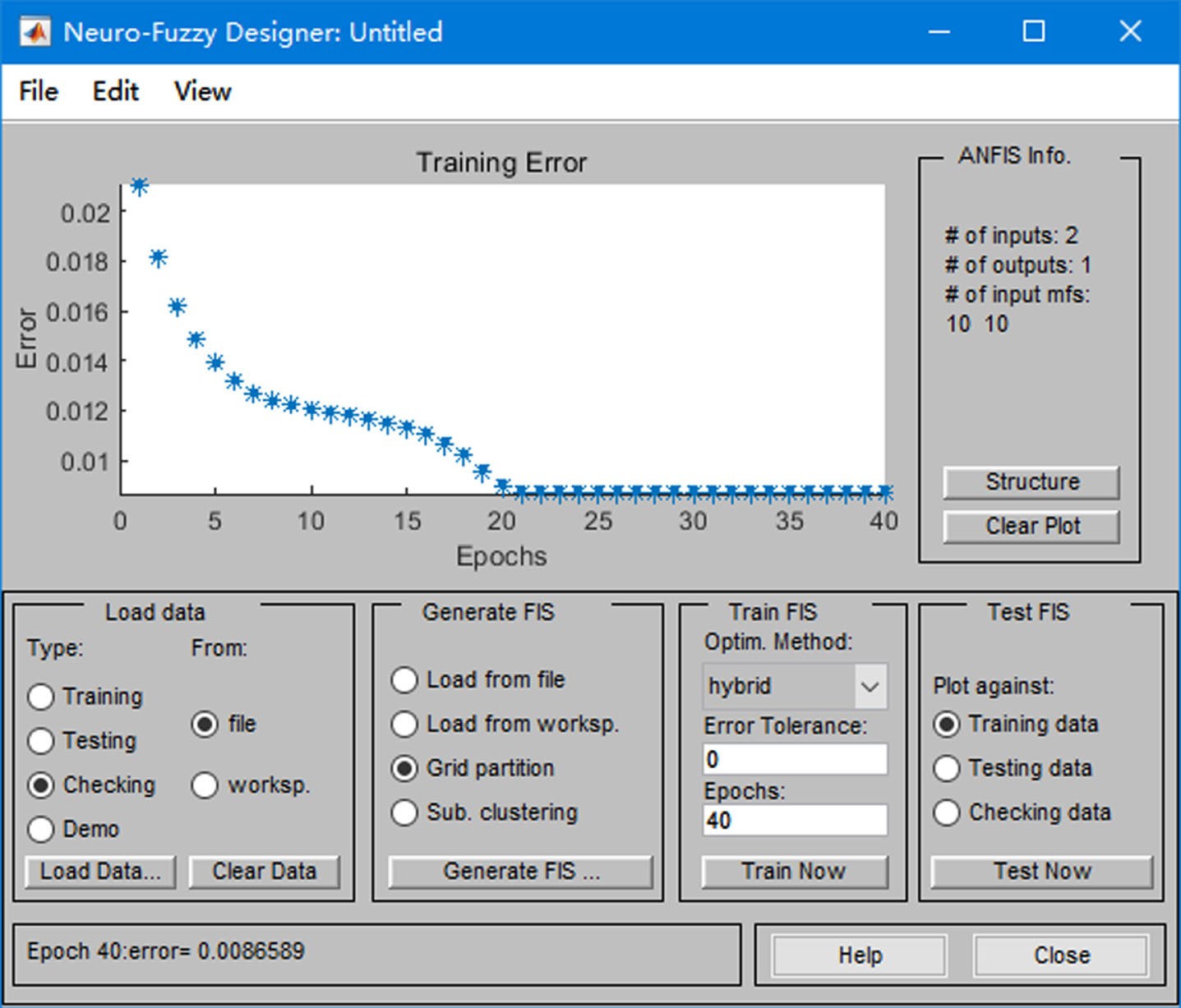
Training error curve.
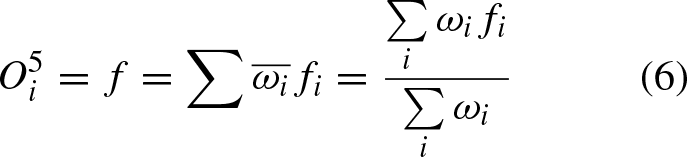
After ANFIS training, checking data set was used to verify the reliability of the optimized FIS model. Selected Checking data in the Test FIS area and clicked the Test Now button. The test result is shown in Fig. 9. The average error is 0.0088243 in the lower left corner of the page. The FIS test error after training is small, indicating that α1.fis is effective.
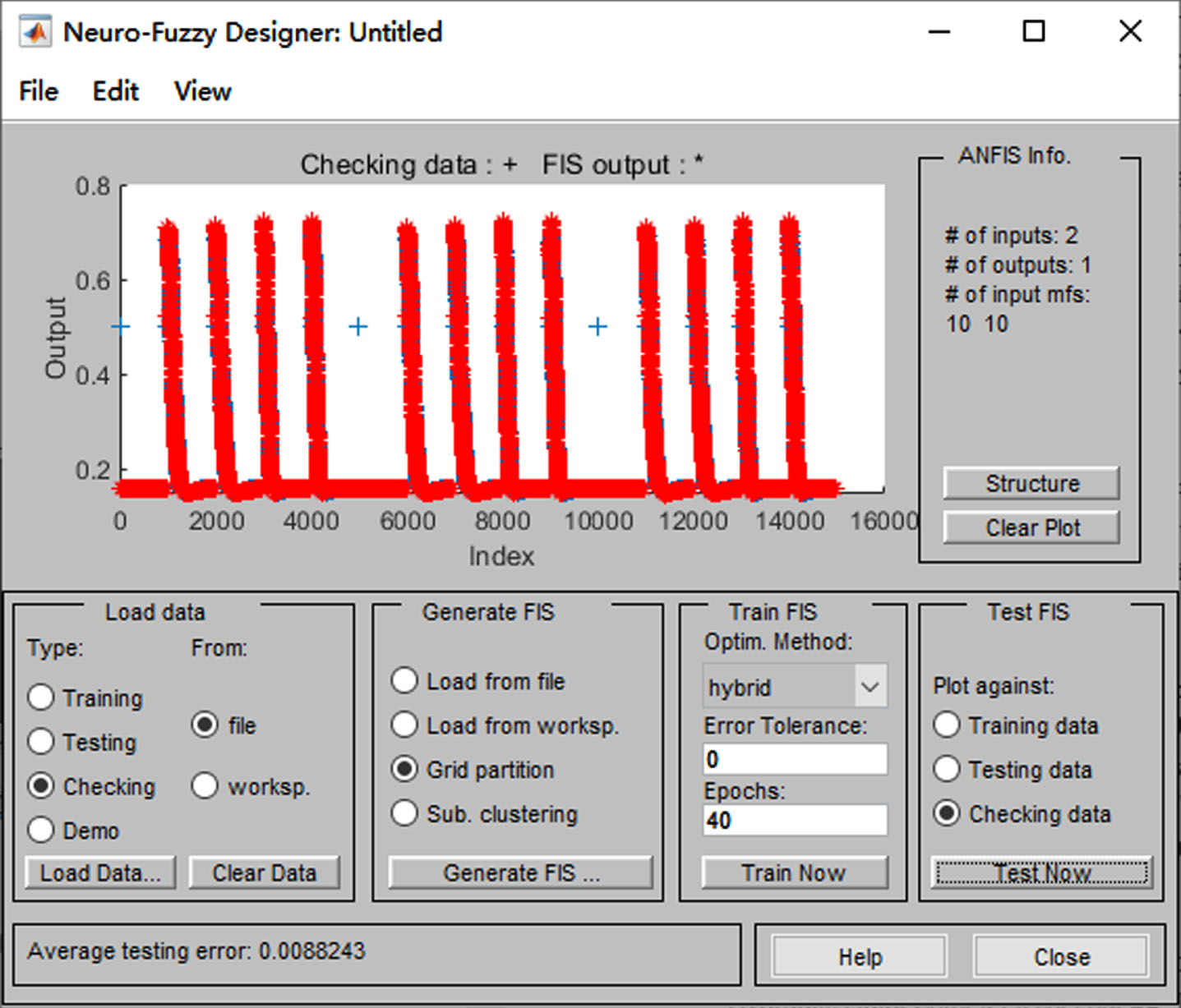
Checking results.
A fuzzy controller optimized based on ANFIS was designed in Simulink. The α1.fis, α2.fis, U1.fis and U2.fis after learning and training by neural network were respectively loaded into the corresponding fuzzy controller module for simulation verification.
Build a 37-ton excavator model, as shown in Fig. 11. AMEsim and MATLAB/simulink co-simulation was used to control the excavator boom to complete lifting, lowering and stopping action. The performance of the fuzzy controller optimized based on ANFIS is verified by comparing the fluctuation of hydraulic cylinder pressure, flow and other physical parameters during the movement of the boom.
Simulation model of the ANFIS controller.
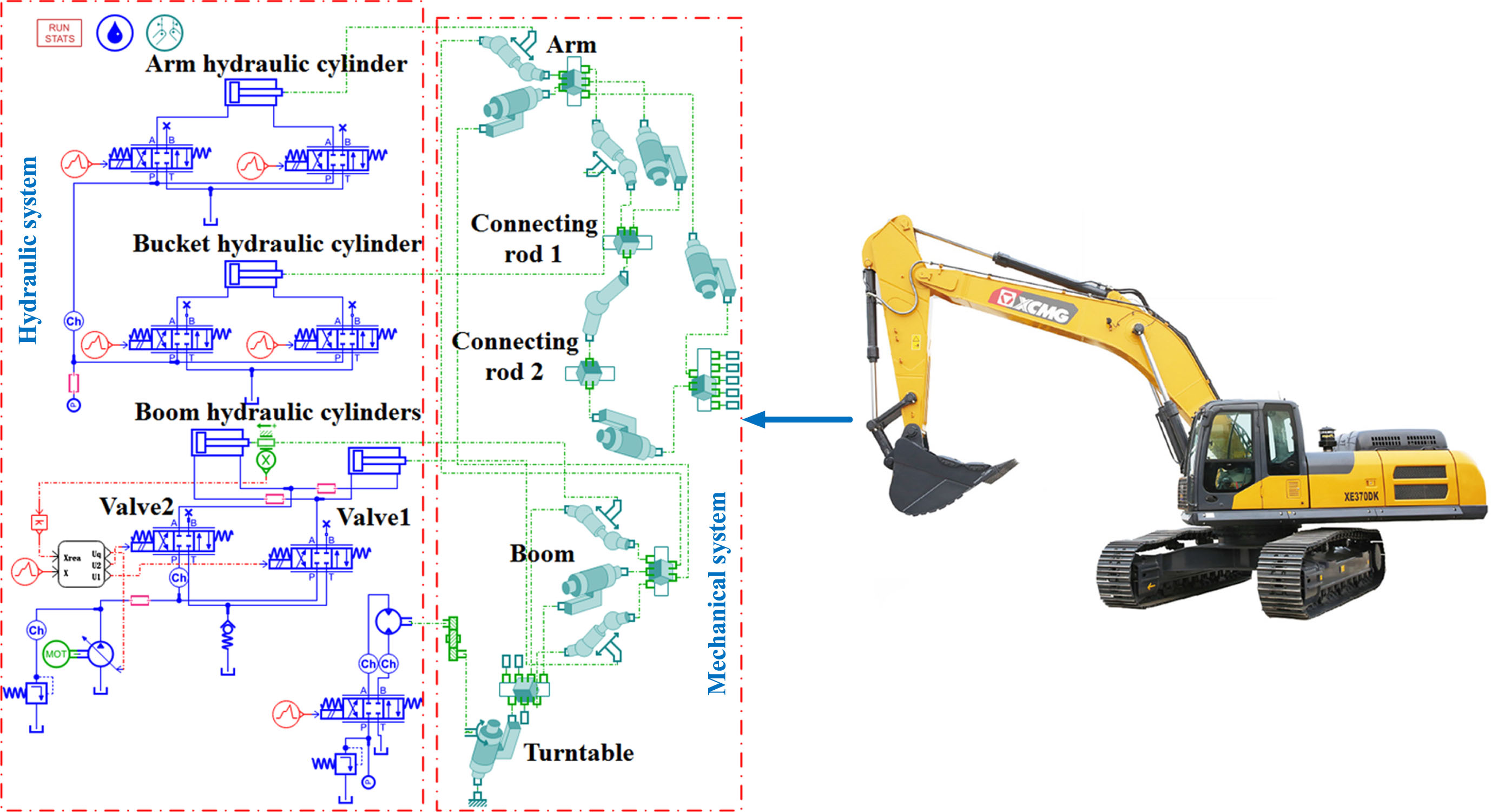
Image of the 37 tons IMC excavator model.
As shown in Fig. 12, the displacement became stable around the sixth second during the starting process of the boom. The displacement of the VUFC fluctuates slightly, while the ANFIS displacement is much more smooth. ANFIS is a little slower in response, but has higher stability.

Boom cylinder displacement.
The two figures in Fig. 13 respectively compare the control signals of valve 1 and valve 2 during the closing of the valve, and the results show that ANFIS makes the control signals smoother. Both VUFC and ANFIS can improve the problem of frequent switching of valve control signals.

Signals of the electric proportional valve. (a) valve 1 signals. (b) valve 2 signals.
In Fig. 14, the fluctuation of boom cylinder pressure was compared. ANFIS did not fluctuate at 6 s, and the pressure was relatively stable in 10–13 s. The results showed that the ANFIS controller significantly optimized the control performance of VUFC. ANFIS improves system operability and driver comfort.
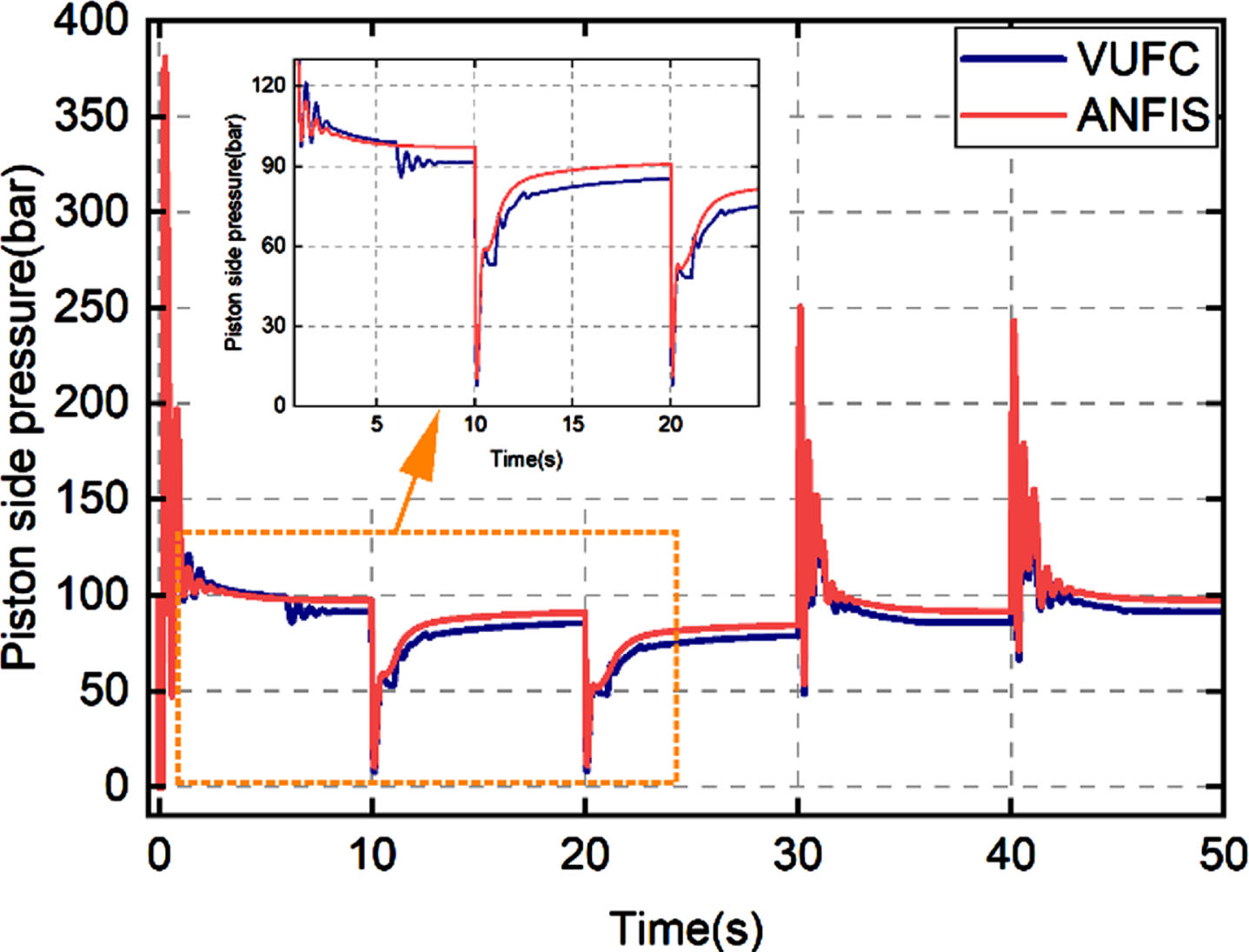
Piston side pressure.
Figure 15 compared the piston moving speed. It can be clearly seen from the local magnification figure that the ANFIS speed did not fluctuate at around 6 s. The speed was more stable in 10–12 s when the piston accelerated and decelerated.
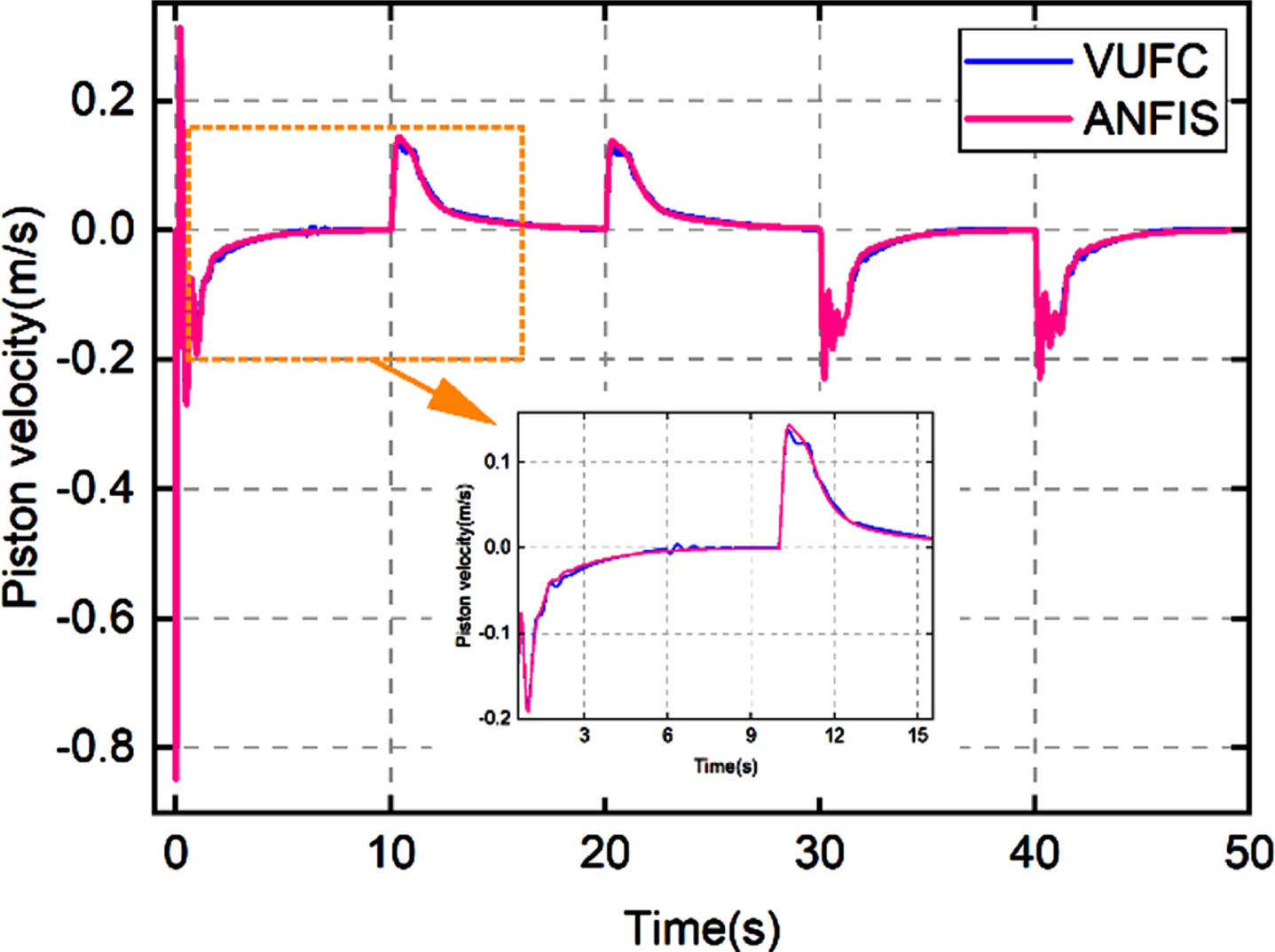
Velocity of the boom cylinder piston.
Figure 16 compares the variation of flow rate at the piston side. 0–6 s is the rising process of the boom, and 10–15 s is the descending process of the boom. It is found that during the rising and falling process of the boom, the flow rate of ANFIS is more stable, which reduces the throttling energy loss caused by the drastic change of flow rate. It improves the energy efficiency of the system.
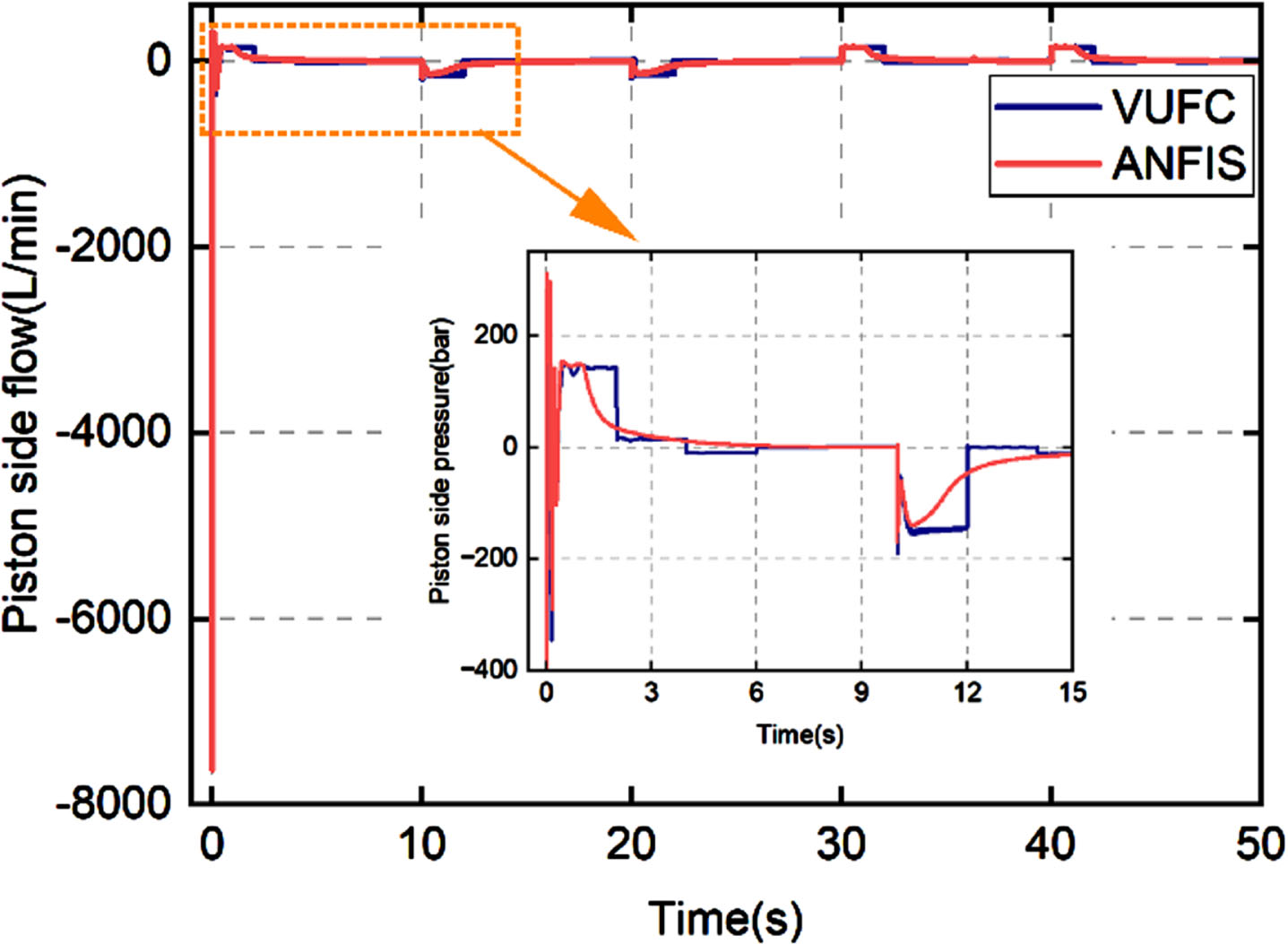
Piston-side flow.
In this paper, we have investigated the feasibility of using ANFIS controller on the position control of hydraulic excavator’s boom. Both VUFC and ANFIS provide satisfactory tracking results, however ANFIS controller makes the IMC system better performance. The simulation results show that the pressure, flow rate of the hydraulic system and the speed of Piston are significantly smoother using ANFIS controller. ANFIS reduces the influence of subjective factors in the design process on the fuzzy controller.
Since Sugeno fuzzy reasoning system is only applicable to single-output fuzzy controller, this paper divided the two two-input and two-output fuzzy controllers of VUFC [9] into four two-input and single-output fuzzy controllers. Due to more fuzzy controllers increase the complexity of the control system and the calculation amount of the computer simulation, which needs to be simplified in the following research work.
Author contributions
Conceptualization, L.Z. and S.H.; methodology, S.H.; software, S.H. and J.Y.; validation, S.H.; formal analysis, Y.L.; investigation, L.Z.; resources, Y.L.; data curation, J.Y.; writing—original draft preparation, S.H.; writing—review and editing, L.Z.; visualization, S.H.; supervision, J.Y.; project administration, S.H.; funding acquisition, L.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Key Research and Development Project of China (2020YFB2009804).
Data availability statement
Not applicable.
Conflicts of interest
The authors declare no conflict of interest.