
Abstract
It is observed that IFSs are defined based on the concept that the iterates take only an integer number of times. This work studies the dynamics of functions, where a function can iterate r times for every r ∈
Introduction
John Hutchinson [13] set up a theory of Iterated Function System(IFS) in 1981. Benoit Mandelbrot [18] popularized the theory by introducing fractals as an attractor of an IFS. Michael Barnsley and others [4] showed that if the contraction of an IFS depends continuously on parameters, then the corresponding attractor also depends continuously on the respective parameter with respect to the Hausdorff metric. The theory of Infinite Iterated Function systems(IIFS) of a countably infinite number of contractive mappings was developed by H.Fernau [12]. Hausdorff and packing measures of the Conformal Iterated Function System(CIFS) were discussed in [6]. The topological pressure of the limit set of parabolic IFS (PIFS) was studied in [7]. Alexandru Mihail [20] generalized IFS to Recurrent IFS(RIFS). Generalized countable IFS (GCIFS) are contractions from X × X to X instead of contractions on the metric space X to itself. It was proved [1] that if all the contractions of GCIFS are Lipschitz with respect to a parameter then the associated attractor depends continuously on the respective parameter. Real Projective IFS(RPIFS) was studied by Barnsley and A. Vince [5]. A topological Version of IFS was studied by Alexandru Mihail [19]. A study of the Topological Version of IIFS was initiated by Dan Dumitru et. al[10]. A. Vince characterized Mobius IFS that possessing an attractor. Another approach to the study of the Topological Version of IFS is due to K. Lesnaik [16, 17]. Detailed discussion on IFS can be seen in, [9, 21].
An Iterated function system is viewed as a dynamical system when the set of function become singleton. Generally, a dynamical system is a tuple (T, X, f), where T is a monoid, X is a nonempty empty set and f is a function, f : T × X → X . In 1965 Zedech [23] introduced Fuzzy sets. And the fuzzy dynamical system was systematically introduced in 1973 by Nazaroff [22]. But the time-dependent dynamical system was explicitly defined by Kloeden in 1980 [14]. He defined a Fuzzy dynamical system(FDS) on a state space X, axiomatically in terms of a fuzzy attainability set mapping
As it is known that a function defined on a set can compose itself many times, The resulting function is called an Iterated function. But the arising question is " Why do we take the composition only n times, where n is an integer?" And we know that f n denotes the function obtained by taking n times the composition of the function f. Then how can we define f r , when r is a non-integer number? In this paper, we define iterated functions got by iterating a function not merely n times but also r times, where n is an integer and r is a real number. Then we study the chaotic behavior of a function using these distorted Iterated functions in support of evidently defined f n s. This approach generalizes IFS in terms of iterations.
Consider that non-integer time iterations often encompass the utilization of advanced mathematical principles and techniques, encompassing fractal calculus, special functions, and complex analysis. These notions hold particular relevance within scenarios characterized by the existence of continuous or fractional patterns, in contrast to discrete steps. Such concepts play a role in enhancing the depth of understanding of complex systems and phenomena.
Preliminaries
Fuzzy functions can be classified into the following three, according to which aspect of the crisp function the fuzzy concept was applied. Crisp functions with fuzzy constraints Crisp function which propagates the fuzziness of independent variable. function that is itself fuzzy, the fuzzifying function blurs the image of the crisp independent variable.
Using the Third type of fuzziness define the fuzzy function as,
Fuzzy Iterated Function System
Consider a function f from a set X to the set of fuzzy sets on X, denoted as
In the scenario where the membership value of the fuzzy set representing the image of an element is non-zero, we have the flexibility to select an element from the support of that fuzzy set as an image, if deemed necessary. As such, we designate a function as a "fuzzy function" if it adheres to the property outlined in the following definition.
Fuzzy Iteration of a function
Typically, the concept of iterating a function is applied for integer values of time. However, instead of restricting the iteration of the function f to integer values of time, we propose to define the iteration of f for real values of time, denoted as r.
If ∃y ∈ Xsuch that, the membership value of y in the fuzzy set f
r
(x), Mf
r
(x) (y) =1 then Mf
r
(x) (p) ≠1 for every p ≠ y, p ∈ X The membership value of the element f
k
(x) in the fuzzy set f
k
(x), Mf
k
(x) (f
k
(x)) =1 for every k ∈ Z.
The values of f
k
(x) are known for all k in the set of integers
Throughout this paper, we use the notation f r (x, y) to denote the membership value of the element y ∈ X in the fuzzy set f r (x).
From the definition, it is clear that we can define more than one type of r-times iteration method for the same function and space.
f n (x) =2 n x.
Define
In this example the membership value of f r (x) is highest for the points that are nearest to the points f m (x) and f n (x), where m =⌊ r ⌋, the largest integer less than or equal to r and n =⌈ r ⌉, the smallest integer greater than or equal to r. Graph of the images of 3 under the functions f3, f2.64, f3.7 and f0.7 are given in Fig. 1.
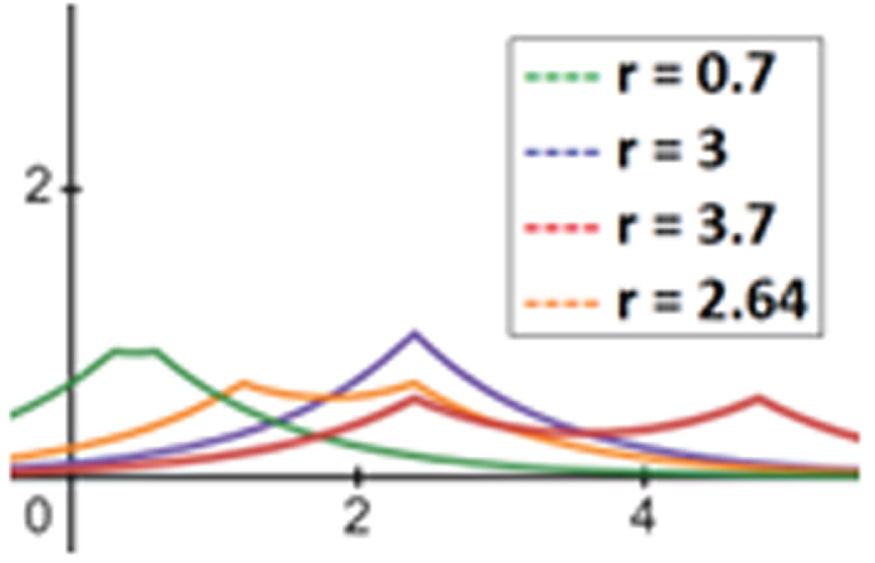
f r (3) for different values of r
Graph of the images of 0.5 under the functions g3, g2.64, g3.7 and g0.7 are given in Fig. 2.

g r (3) for different values of r

Original image
Note that when we defuzzify the fuzzy set D
r
(f) using the height method(defuzzify f
r
(x) to the point y with maximum membership value(If there is more than one such point, choose one of them randomly.), we obtain a single function defined on

Iterations of the image up to 10th iteration
f (A)
ij
=
I (x, y) is the gray scale value. function. Now, define
We are transforming an image by detecting its edges through the computation of intensity gradients. The process involves identifying areas where the intensity undergoes rapid changes, effectively highlighting edges within the image. The reference to "Fig. 3" signifies the original image under consideration. Despite the inherent challenge posed by the low contrast in the original image, the iterative application of the edge detection process consistently improves the delineation of edges. But, applying the Canny edge detection method to low-contrast images often leads to a complete blackout, where the entire image appears dark.
Examine Figure4. With each round of the process, the edges become clearer, but at the same time, the noise also increases. To tackle this, our fuzzy iteration method helps by incorporating intermediate steps. This helps strike a good balance between making the edges stand out and controlling unwanted noise in the image processing. Fig. 5 displays the result after the 9.5th iteration.

Iteration 9.5
This scenario is an example of a situation where fuzzy iterations prove advantageous.
The algorithm for find the r th iterated image is given in algorithm 1
Initialize m1 = floor (r) and m2 = ceil (r) based on r
Create an empty final _ image matrix with the same shape as images [m1]
Compute gradient _ image using compute_gradient on images [m1]
Check if gradient magnitude at (x, y) is
Create s _ values ranging from 0 to 225 with step 1
Calculate
Assign intensity value corresponding to the maximum ir to final _ image [x, y]
Assign pixel value from images [m1] to final _ image [x, y]
In the study of the dynamics of a function, various conditions exist to determine when a function can be considered chaotic.
f is Topologically transitive. and, Set of periodic points of f is dense in X.
Both of these aspects rely on the iteration of the specified function. Therefore, in accordance with the newly introduced iterative method in definition 3.2, we establish an alternative perspective for defining chaotic functions.
Suppose we have a function f defined on a metric space X that exhibits topological transitivity. In such a case, for any open sets U and V within X, there exists an n in the set of natural numbers N such that the intersection of f n (U) and V is non-empty (i.e., f n (U) ∩ V ≠ φ). This implies the existence of u in U and v inV, such that f n (u) = v, and we can express this relationship as f n (u, v) =1. Consequently, we can introduce the concept of ϵ-Topological Transitivity as described below.
Now let f (θ) =
We know that f is topologically transitive. This implies that for any pair of open sets U and V in the space S1, there exists an integer n such that f n (U)∩ V ≠ ∅. This condition implies the existence of elements φ in U and θ in V such that f n (φ) = θ
⇒f n (φ, θ) =1. Consequently, for every ϵ in the interval (0, 1], we have f n (φ, θ) ≥ ϵ.
Hence, in the dynamical system (S1, 2θ, f r ), it follows that f is ϵ-topologically transitive for every ϵ ∈ (0, 1].
We promptly obtain a result that,
⇒ ∃ u ∈ U, v ∈ V such that f k (u) = v⇒f k (u, v) =1⇒f k (u, v) ≥ ϵ, ∀ ϵ ∈ [0, 1]
⇒f is ϵ-topologically transitive.
This is an example of functions that are ϵ-topologically transitive but not topologically transitive.
In this example, we can see that the value ϵ of an ϵ-topologically transitive function depends on the distance between the sets f n (U) and the set V. The distance is equal to 0 for an n means ϵ = 1, that is, f is 1- topological transitive. As per the distance increase ϵ decreases.
f k (U) ∩ (V) ≠ φ
⇒ ∃ u ∈ U and v ∈ V such that
⇒ f k (u, v) =1 for a u ∈ U and v ∈ V
⇒ f is 1-topologically transitive.
Conversely, assume that f is 1-topologically transitive. This implies that for every pair of open sets U and V, there exists r ∈ r ∈ (k, k + 1).r ∈ I r ∈ I
case 1: r ∈ (k, k + 1). Then f
r
(u, v) =1
case 2: r ∈ I. then ⌊r ⌋ = ⌈ r ⌉ = r. Then f r (u, v) =1
In either case we get,
(If k is a negative integer, act f-k on both sides.) So we get that ∃ k ∈ Z such that f k (U) ∩ V ≠ φ.
Hence the proof.
Next, we define periodic points from the perspective of the r-times iterations.
In this example, it is evident that as the distance between x and f n (x) diminishes, the point x transforms into an ϵ-periodic point, with ϵ approaching closer to 1.
f is ϵ-Topologically transitive. Set of α-Periodic point, α ≥ ϵ is dense in X.
We get that in some FIFSs the chaotic and 1-chaotic properties are equivalent. What are the common characteristics of such systems? In order to determine this, we require the following definitions.
(x, y) p ∩ (x, y) q = φ, ∀p ≠ q ∈ [0, 1].
⇒f is 1-topologically transitive and 1-periodic points are dense in X.
⇒f is 1-topologically transitive and 1-periodic points are dense in X
⇒ f is 1-chaotic.
Conversely, assume that f is 1-chaotic. This implies f is 1-topological transitive and 1-periodic points are dense in X.
Let U,V be two arbitrary open sets in X.
f is 1-topological transitive
⇒ ∃ r ∈ R, u ∈ U and v ∈ V such that f r (u, v) =1⇒r ∈ (u, v) 1.
(u, v) 1 ⊂ Z for every (u,v) ⇒r = k ∈ Z.
By the properties of f r , f k (u, f k (u)) =1 and f k (u, v) =1. Which implies f k (u) = v . ⇒f k (U) ∩ V ≠ φ⇒ f is topologically transitive.
Now, let x be a 1-periodic point. This ⇒ ∃r ∈ R such that f r (x, x) =1⇒r ∈ (x, x) 1⇒r = k ∈ I. f k (x, f k (x)) =1, f k (x, x) =1⇒f k (x) = x⇒x is a periodic point. Hence periodic points are dense in X. So, the proof is here.
⇒ for every pair of open sets U and V
∃k ∈ Z, u ∈ U and v ∈ V such that f
k
(u) = v. Then
⇒ f is 1-topologically transitive.
Conversely, assume that f is 1-topologically transitive.
⇒ for every open sets U and V ∃r ∈
⇔|cosπr∣ = ed(f⌊r⌋(u),v) ⇔ ∣cosπr∣ = ed(f⌊r⌋(u),v) = 1
⇔r ∈ I and f⌊r⌋ (u) = f r (u) = v ⇒f r (U) ∩ V ≠ φ
⇒f is topologically transitive.
From theorem 3.2 we get, f is 1-topologically transitive
⇔ f is topologically transitive. (1)
Now we will prove that x is a 1-periodic point if and only if x is a periodic point.
Let x be a periodic point of f. Which implies that
∃k ∈ Z such that f
k
(x) = x. Let r = k then,
⇒ x is a 1-periodic point.
Conversely, Let x be a 1-periodic point. Then ∃r ∈ R such that f r (x, x) =1.
case 1: r ∉ Z, then
⇒
⇒ d (f k (x) , x) and d (fk+1 (x) , x) are equal to 0
⇒f k (x) = fk+1 (x) = x
⇒x is a fixed point.
case 2: r ∈ Z, then
⇒f r (x) = x . r ∈ Z ⇒ x is a periodic point.
So, in either case, x is a 1-periodic point if and only if x is a periodic point.(2)
Now (1) and (2) give the proof.
Sensitive dependence on initial conditions
Sensitive dependence on initial conditions is a concept in chaos theory that describes how small differences in the initial conditions of a dynamical system can lead to significantly different outcomes over time. In chaotic systems, even a tiny change in the starting point can result in a vastly different trajectory. Here we generalize the definition of sensitive dependence on initial conditions to the existence of a real number r such that images of x and y, obtained by defuzzifying the f r (x) and f r (y), are separated by at least the distance δ.
In this section, we use η x to denote the collection of all neighborhoods of x in the metric space X.
Let x ∈ X arbitrary and N x is an arbitrary neighborhood of x. Then ∃y ∈ N x and k ∈ I such that d (f k (x) , f k (y)) > δ.
We have f
k
(x, f
k
(x)) =1 and f
k
(y, f
k
(y)) =1. Take
Then
Hence the proof.
∣2πλ (⌊ rx ⌋ - ⌊ ry ⌋) ∣ ≥ δ + ϵ .
Supremum of f r (x, z) and f r (y, z) attains at f⌊rx⌋ (x) and f⌊ry⌋ (y) respectively.
⇒
Hence the proof.
The functions h
x
: ∀r ∈
Then f satisfies the condition of sensitive dependence on initial conditions.
We have h
x
and h
y
are continuous and increasing onto map. Which implies ∃r
x
, r
y
∈
Now, we have
Hence the proof.
Footnotes
Acknowledgment
We express our sincere gratitude to the reviewers for their valuable comments.
The first author acknowledges the financial support provided by the Council of Scientific and Industrial Research, India through this research