
Abstract
The Hilbert spectrum images of intrinsic mode functions (IMF) of empirical mode decomposition (EMD) analysis and variational mode decomposition (VMD) analysis of faulty machine vibration signals are used in deep convolutional neural network (DCNN) for machine fault classification in which the DCNN automatically learns the features from spectral images using convolution layer. Though both EMD and VMD analysis suit well for non-stationary signal analysis, VMD has the merit of aliasing free IMFs. In this paper, the performance improvement of DCNN classification for a non-stationary vibration signal dataset using VMD is brought out. The numerical experiment uses the Hilbert spectrum images of 4 EMD-IMFs and 4 VMD-IMFs in DCNN to classify 10 different faults of the Case Western Reserve University (CWRU) bearing dataset. The confusion matrices are obtained and the plot of model accuracies in terms of epochs for the DCNN is analysed. It is shown that the spectrum images of one of the four EMD-IMFs, IMF0, give a validation accuracy of 100% and in the case of VMD the spectrum images of two of the four VMD-IMFs, IMF0, and IMF1 give a validation accuracy of 100%. This reveals that non-aliasing IMFs of VMD are better at classifying bearing faults. Further to bring out the merits of VMD analysis for non-stationary signals the numerical experiment is conducted using VMD analysis for binary fault classification of the milling dataset which is more non-stationary than the bearing dataset which is proved by plotting the statistical parameters of both datasets against time. It is found that the DCNN classification is 100% accurate for IMF3 of VMD analysis which is much better than the 81% accuracy provided by EMD analysis as per existing literature. The performance comparison highlights the merits of VMD analysis over EMD analysis and other state-of-the-art methods and ensemble learning methods.
Keywords
List of abbreviations
Description
greaterthan Intrinsic Mode Functions
greaterthan Empirical Mode Decomposition
greaterthan Variational Mode Decomposition
greaterthan Deep Convolutional Neural Network
greaterthan Hilbert Transform
greaterthan Ensemble Learning
greaterthan Machine learning
greaterthan Inner Race (fault name)
greaterthan Ball (fault name)
greaterthan Orthogonal (fault name)
greaterthan Drive End (data)
greaterthan Case Western Reserve University
greaterthan Rectified Linear Units
Introduction
The process of detecting machine faults advanced in time is called predictive maintenance [31] and vibration analysis is a successful tool to execute condition monitoring for industrial equipment to identify and predict failure. This is highly useful for fault diagnosis and equipment management for rotating machines which usually generate vibration signals [11]. Almost all vibration measuring devices perform Fast Fourier Transform (FFT) for signal analysis [4]. In recent days, machine learning (ML) methods [1] have become popular for the extraction of fault information from the vibration signals and help in fault classification. The fault investigation using ML follows two steps: extraction of features from the vibration signals and learning the model from the features [23]. The most common vibration signal features used are mean, root mean square, skewness, maximum, minimum, standard deviation, range, kurtosis, standard deviation, variation, root mean square (RMS), absolute maximum, skewness, kurtosis, crest factor, margin factor, shape factor, impulse factor, A factor of variance, [12] B factor of variance, etc. These features have been used in many ML algorithms like support vector machine (SVM), k-nearest neighbor (KNN), Kernel Bayes, [28] Multilayer perceptron, Decision trees, sparrow search algorithm (SSA) [7], etc to forecast machine faults. A deep convolution neural network (DCNN) is a robust ML approach for image classification and segmentation [5, 16]. In recent days, the method of representing vibration signals in form of images and learning the DCNN model is gaining a lot of attention as DCNN does not require a separate feature extraction stage and automatically learns the features. A recent study [25] uses a convolutional neural network (CNN) to achieve an accuracy of over 96% by reshaping the one-dimensional CWRU vibration data into time-domain images of two dimensions. In another study [27], an accuracy of 98% is attained using a similar technique of altered time-domain images and Alexa-net-based transfer learning architecture [47]. As frequency-domain analysis reveals many of the signal’s hidden specifics, it performs more accurately than time-domain analysis. In a different study [27], a classification efficiency of 99% is shown using frequency-domain sub-spectrograms of vibration signals as images in a CNN transfer learning architecture based on Alexa-net. The main advantage of both approaches [27, 47] is that they both employ transfer learning architecture, which is characterized by very high accuracy and builds on the prior learning completed in Alexa-net. Continuous wavelet transform (CWT) is used in another study [53] to obtain signal spectra, and employing them in CNN, a very high accuracy of 99% is shown. Many researchers are interested in using the intrinsic mode function (IMF) derived by empirical mode decomposition (EMD) of vibration signals for additional analysis [10, 13, 51]. This fits significantly better for non-stationary signals and the typical process followed generally in ML techniques for vibration analysis for fault classification is shown in Fig. 1. However, on a SVM-based classifier, the CNN learned features and other time-domain features of IMF signals are used, and an accuracy of 99% is shown [51]. In EMD entropy features Stacked sparse denoising autoencoder (SSDAE) approach a precision of 99.55% is achieved [10].

Basic machine learning framework of vibrational analysis.
In our previous published work, [32] the spectral images of empirical mode decomposition-intrinsic mode function (EMD-IMF) signals obtained using short-time Fourier transform (STFT) are trained using DCNN, and it is shown that for fault classification, the method gives a better classification accuracy than that of using spectral images of original signals. Using DCNN eliminates the need for a separate feature extraction stage as it learns features automatically from the training images. The numerical experiment is conducted using the bearing dataset for the fault classification problem and it is found that both methods gave a result of 100% validation accuracy for certain IMFs. As an ablation study, to bring out the efficacy of the EMD method, the numerical method is conducted for both methods on a simple binary classification problem using a milling dataset which is more nonstationary in nature. The result shows that the EMD-IMF method is better than the method that uses the spectrum of the original signal. For this milling dataset which is non-stationary in nature, the validation accuracy of the DCNN model when using a spectrum of original signals is 40% and that of the EMD-IMF method is 81% validation accuracy. This brings out the performance improvement of the method using EMD for non-stationary scenarios. Variational mode decomposition (VMD) is another method that is much more suitable for non-stationary signals and as variational mode decomposition-intrinsic mode function (VMD-IMF) are band-limited and alias-free the spectrum images obtained will lead to better results over EMD-IMFs. Considering the merits of VMD, this paper proposed to use spectrum images of VMD-IMF signals of bearing data and milling data in DCNN to demonstrate a better accuracy than the EMD-IMF method.
This paper aims to represent the Hilbert transform of IMF obtained using VMD spectral images to be trained with DCNN. The typical methodology is given in Fig. 1 and the proposed method is illustrated in Fig. 2 which differs from the way the IMFs are used. It can be observed that in the method given in Fig. 1, the entropies of the IMFs are used as an additional feature, and in the proposed method the complete IMF variations in the form of Hilbert spectrum are utilized in DCNN to learn the useful features. From Fig. 2 it can be observed that multiple CNN training is involved which is similar to classical ensemble learning (EL) in which a strong classifier is built by combining weaker classifiers.
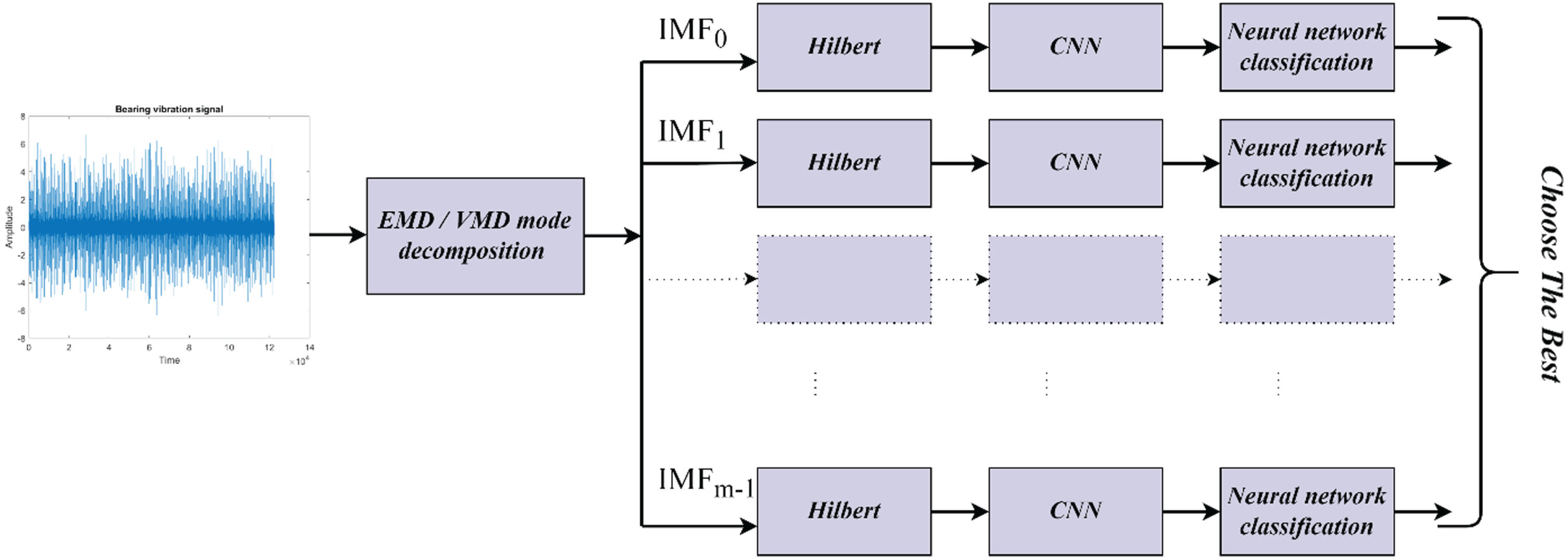
The proposed machine learning framework of vibrational analysis.
In this paper numerical experiment is conducted for both bearing and milling datasets using both EMD-IMF and VMD-IMF. Four IMF signals obtained by EMD and VMD are used and it is found that the proposed VMD method classifies 10 different fault classes of the CWRU-bearing dataset with validation accuracy of 100% at certain IMFs. It is also inferred that most of the VMD-IMFs perform better than EMD-IMFs. For milling data, the proposed VMD-IMF method gives a validation accuracy of 100% which is much better than the accuracy of the EMD method which is 81%. Hence this work brings out the efficacy of using full EMD/VMD-IMF information of vibration signals in DCNN in classifying the machine faults and also demonstrates the merits of VMD over EMD. The other key inference made is based on how this approach is different from the EL method. Though this method involves multiple CNN training it ends with one best strongest model with 100% accuracy and thus it is required to deploy only one strongest model finally that reduces computation cost. The research contribution in this paper can be summarized as follows. Demonstration of using Hilbert spectrogram images of IMF of EMD/VMD in DCNN learning instead of a conventional parametric approach for CWRU bearing dataset. The merits of aliasing free VMD-IMF over EMD-IMF are brought out by showing that two VMD-IMFs IMF0 and IMF1 result in 100% validation accuracy for CWRU bearing dataset. An ablation study to bring out the robustness of the VMD approach, by applying to the milling dataset which is more non-stationary than the bearing dataset. The result obtained is 100% validation accuracy for VMD-IMF3 which is better than the EMD method. The merits of the proposed VMD approach over the EL approach are studied and reported.
There are so many research works that have been carried out in the area of automatic machine fault classification using vibration analysis and, in this section, some of the important related works are discussed in detail. In Section 1, the evolution of fault classification methods using vibration analysis starting from FFT analysis to the ML method is discussed. The discussion is also made on various important useful parameters for vibration analysis. The merits of using image representation of vibration signal in DCNN are also discussed in the same section. The novelty of our proposed work is to use Hilbert spectral images of IMFs obtained by EMD/VMD for very high performance in terms of validation accuracy. In this section, the research works that brought out the significance of EMD and VMD in machine fault classification problems are discussed. The modalities of using IMFs of EMD and VMD in the ML algorithm are also highlighted in this section. The other key discussion that is made in this section is on related works that are done based on EL.
The signal decomposition method increases the diagnostic efficiency of rotating machinery by reducing signal complexity. The well-known decomposition technique EMD, created by Huang et al., has been utilized for decades to detect numerous rotating equipment issues [20, 22, 41, 54]. EMD is a time-frequency analysis method and is demonstrated in signal processing methods in many previous literatures. Instead of relying on preset parameters, the EMD analysis takes into account the signals’ local time scales [19]. In comparison to typical methods like discrete wavelet analysis, the enhanced EMD approach exhibits adaptability, orthogonality, and robustness. In EMD the input signal is broken down into a collection of IMFs and every IMF can be seen as the signal’s fundamental function. The EMD technique may perform better than conventional techniques when the vibration signals are nonlinear and nonstationary. Furthermore, EMD is a self-adjusting processing technique. EMD adapt to the sample rate and noise [49]. In a recent work, a combined approach known as bi-spectrum based EMD (BSEMD) [37] is illustrated to identify machine faults. In a different work, Fuzzy C-means (FCM) clustering of vibration images acquired by empirical mode decomposition-pesudo-Wigner-Ville distribution (EMD-PWVD) is demonstrated [14] in which EMD-PWVD converts vibration data with varying fault degrees into contour time-frequency images then the energy distribution values of the vibration images are utilized as an image feature and the images are segmented to determine the machine faults. Later on, several techniques for improving EMD have been developed, including ensemble empirical mode decomposition (EEMD). VMD, a new signal decomposition technique that may diagnose rotating equipment more accurately than both EMD and EEMD methods is studied [29, 57, 58]. Integrating EMD/VMD analysis in ML is tricky and challenging. One of such integration done in a use case is illustrated in Fig. 2 in which entropies of IMFs are used as additional parameters along with other features learned from STFT using CNN [51] and the accuracy shown is about 99.75% for CWRU bearing dataset [42]. Some work demonstrated the usage of EMD/VMD analysis signals directly in CNN for better accuracy. The One- dimensional (1D) vibration signal is subjected to EMD analysis to get a multi-dimensional IMF matrix which is used directly in CNN and an accuracy of 99.79% is achieved using CWRU bearing dataset. In another work in place of EMD analysis, VMD analysis is proposed for improved accuracy [30]. One-dimensional convolution neural network (1D-CNN) based ML architecture is also studied for machine fault classification using EMD-IMFs [34]. In a very recent paper EMD based multi-scale CNN is proposed to improve the accuracy of fault classification up to 99.86% [34]. As already discussed, VMD analysis is aliasing free and more suitable for fault classification and this is demonstrated in several works [8, 50, 59].
In this section, another class of ML method considered for discussion is EL in which [9, 26, 35, 38– 40, 52, 55] a global decision is taken from the outputs of several independent classifiers to get very high accuracy. One of the popular vastly used EL method is random forest algorithm [6, 43] in which multiple ML models are used in parallel and the result is evaluated using a voting scheme. EL is applied in many works related to machine fault classification using vibration analysis [15, 24, 38, 44, 60] In this discussion focus is given to CNN based EL. A CNN based EL is proposed in which multiple classifiers with different activation functions are used and the final classification result is obtained [38] for CWRU bearing dataset. The proposed method shows a result of 100%, 89.33%, 100%, 98.04%, 98.04%, 100%, 95.29%, 100%, 90.91%, 73.02%, 85.22%, 99.01% for various faults. The result is found to be superior than that of SVM and boosting method. A similar multiple CNN classifiers and EL algorithm is implemented to show that the EL algorithm evaluates the results accurately by combining the individual results of the CNN classifiers with accuracy ranges like 0.9833, 0.9783, 0.9627, 0.9410, 0.9802, 0.9470, 0.9659, 0.9800, 0.9745, 0.9390 [55] using CWRU bearing dataset. In a recent work, imbalanced ensemble method with DenseNet and Evidential Reasoning rule (IEMD-ER) is proposed for the Paderborn University bearing dataset and proved to be superior among other EL. It should be noted that EL involves multiple learning models and multiple deployments [46] of the individual classifiers that demands more computation power.
Proposed work
As we discussed in Section 2 there are several ways to incorporate learning of IMF of EMD/VMD signals and in this work, it is proposed to use the Hilbert spectrum images of IMF signals along with DCNN as a novel approach. It is proposed to bring out the merits of using spectrum images of IMF-VMD of vibration signal over IMF-EMD of vibration signals in DCNN to classify the machine faults in DCNN. The study is done using two different datasets
The performance of DCNN learning on EMD spectrum images is already well proven to be very high close to 100% validation accuracy for the first dataset [32]. As an ablation study, to bring out the fact that EMD spectrum learning is better with DCNN, dataset 2 is used in which more non-stationary process are involved and this will be explained in Subsequent section 3.4. To create the spectrum images Hilbert transform is used. In this section, the methodology of spectrum image creation and the dataset description are discussed in detail. The nonstationary nature of the milling dataset is also illustrated in this section.
From the dataset, the vibration signals for healthy and unhealthy situations are extracted, and then separated into K-short, overlapping signals that overlap for T time units. In this work, we took into account two datasets [62, 63] and the K depends on the dataset we choose. Each of these K signals is regarded as a member of a fault class. For each of these signals, EMD is applied to get R intrinsic mode functions (IMF). Hilbert transform is applied to these mode functions with a window length of N and 50% overlapping to get spectrum images as shown in Fig. 3. A similar procedure is repeated to get the spectrum images by applying VMD in place of EMD shown in Fig. 4. The IMF obtained using both EMD and VMD will distribute every bit of information about the time-domain signal. The IMF is still the time-domain function that acts as the signal’s roughly parallel structure [2].
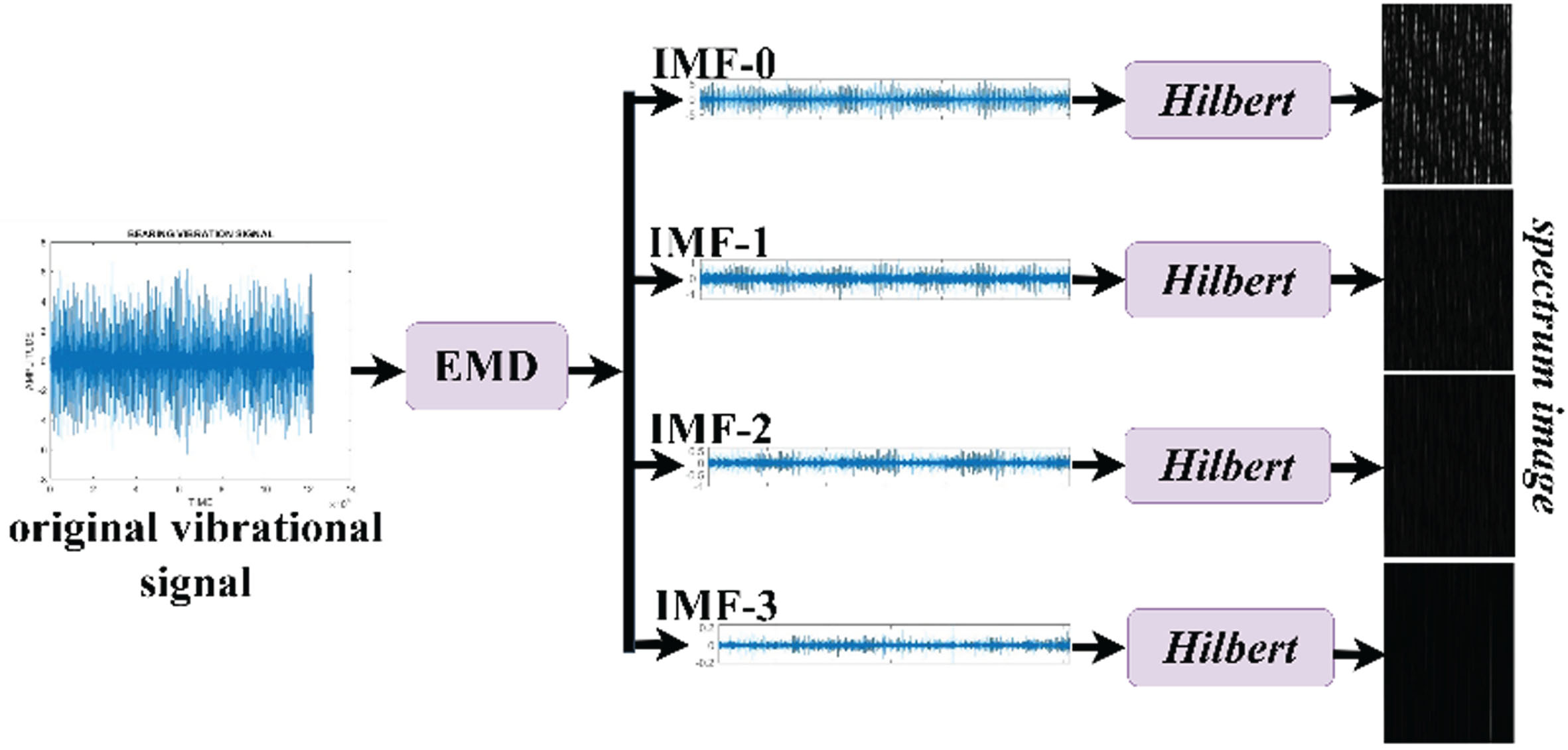
Hilbert spectrum creation of EMD-IMFs.
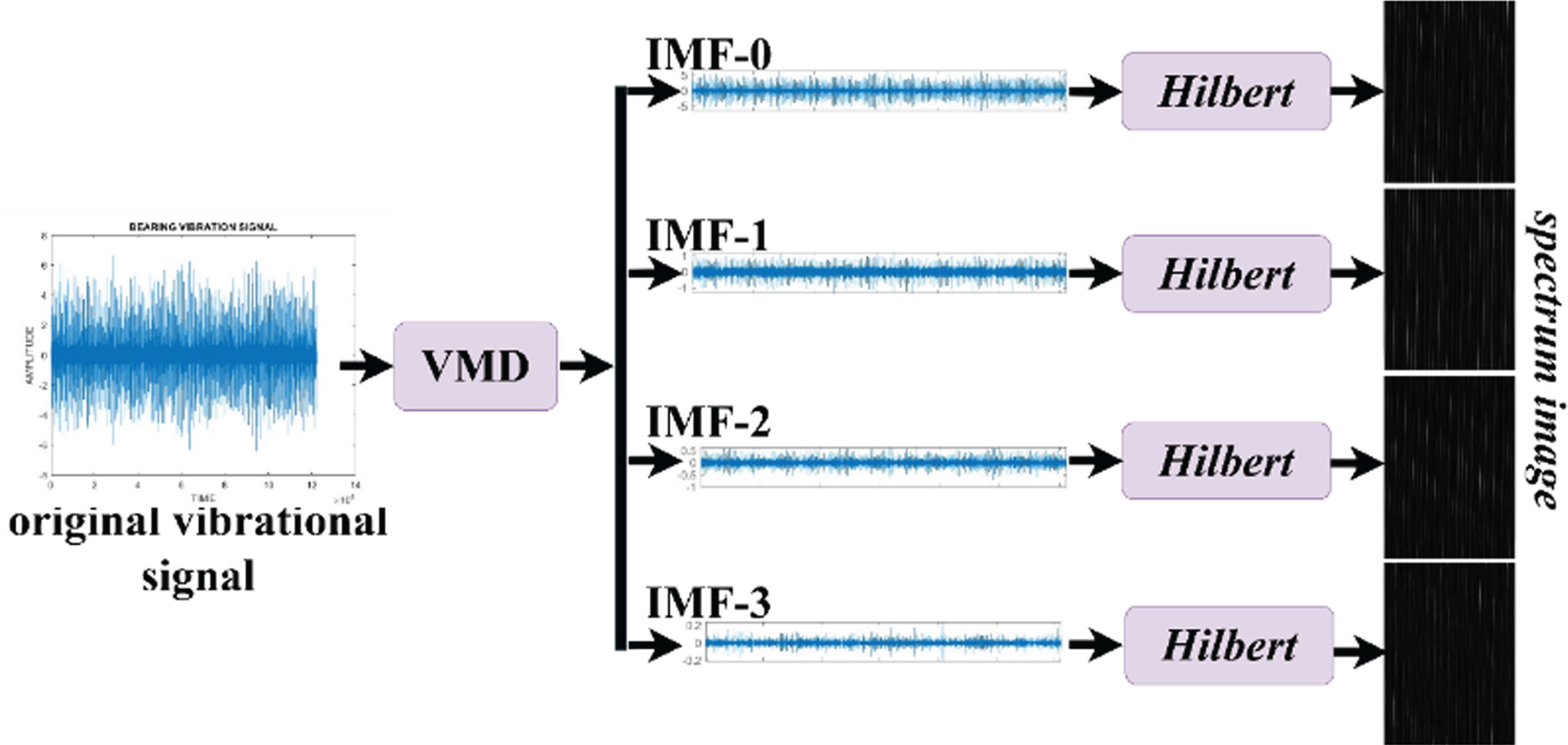
Hilbert spectrum creation of VMD-IMFs.
Experiments were carried out on the CWRU [62] bearing vibration signal database to demonstrate the effectiveness of our methodology. The experimental setup includes a dynamometer, a torque transducer, and a 2 HP motor. The motor shaft is supported by the test bearings. Electro-discharge machining is being used on the test bearings to create single-point defects with dimensions of 7, 14, 21, and 28 mils (one mil is equal to 0.001 inch). Digital data were recorded at a rate of 12,000 pulses per second for drive-end bearing problems. Speed and horsepower had to be manually recorded and measured by the torque transducer. Accelerometers will be used to collect vibration data. The bearing vibration signal database contains information on a wide range of signal elements. It covers a variety of fault types that might occur in experiment equipment, including inner race (IR), ball (BA), and orthogonal (OR) defects. The normal signal and all the classes of fault signals were considered in this experiment. Drive end (DE) accelerometer data is used in the proposed experiment to analyses the vibration signals corresponding to normal conditions and other defects. Following the procedures as discussed in Subsection 3.1 the original DE vibration signals from the bearing dataset are divided into M components and R IMF signals are obtained using EMD and VMD. The first four IMF signals are subsequently taken into focus, and the Hilbert transform is applied to each IMF signal before being transformed to image data with N = 256, resulting in 1105 × 4 images representing various faults for IMF0 as shown in Table 1 similarly for IMF1, IMF2, and IMF3. Figures 5 and 6 show a sample of 10 classes of erroneous spectrum images for the IMF0 for EMD and VMD. These are visuals that were obtained for 10 different faulty classes and DCNN can further classify these images. Thus, in this case, there are four DCNN trained, and if the output is decided based on a voting mechanism the scheme will be similar to EL. More light on this shall be thrown in the result and discussion Section 5.
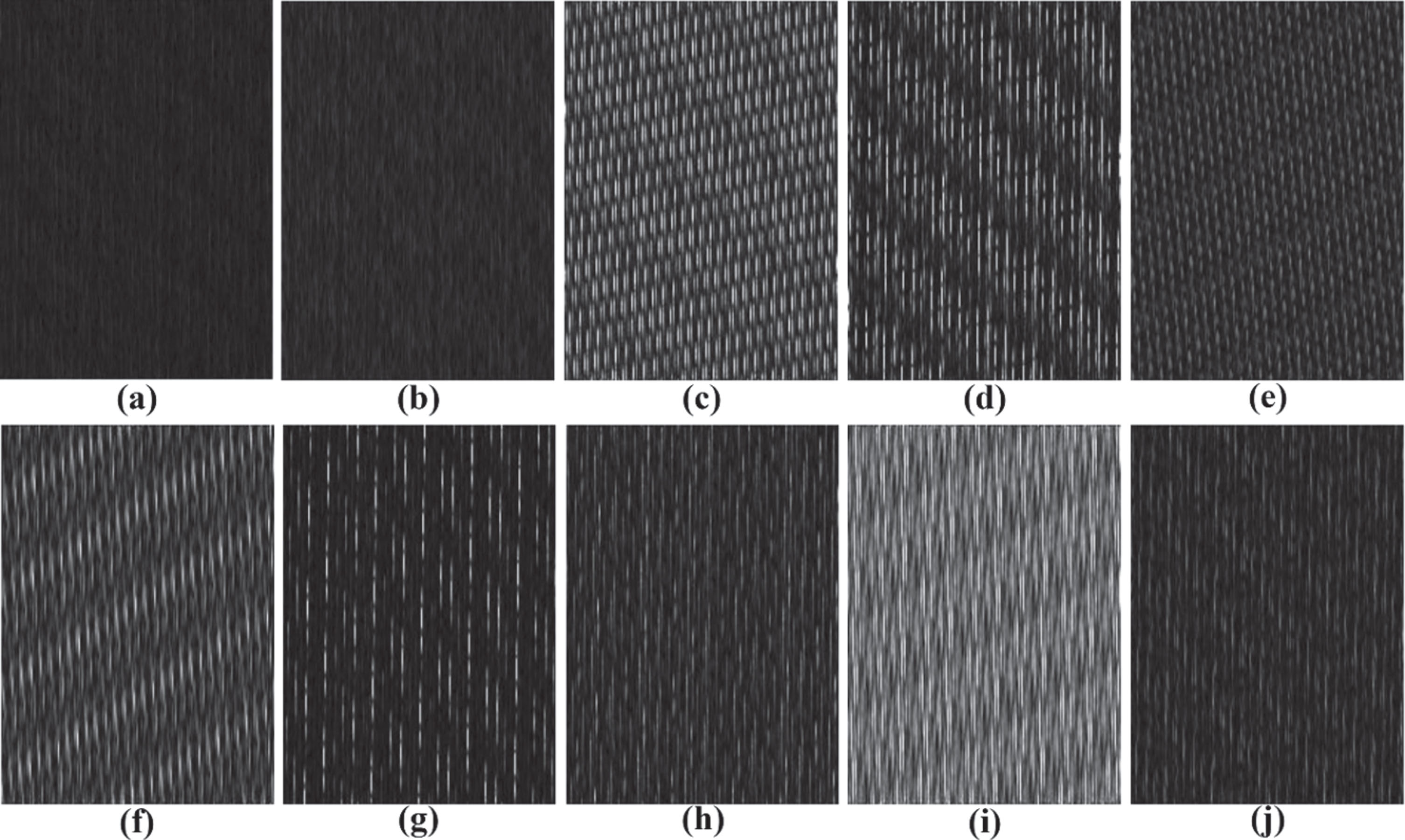
Sample EMD Hilbert spectrums for 10 different fault classes for CWRU bearing dataset (a) Ball B007, (b) Ball B021, (c) Centered OR007, (d) Centered OR021, (e) Inner Race IR007, (f) Inner race IR021, (g) Opposite OR007, (h) Opposite OR021, (i) Orthogonal OR007, (j) Orthogonal OR021.
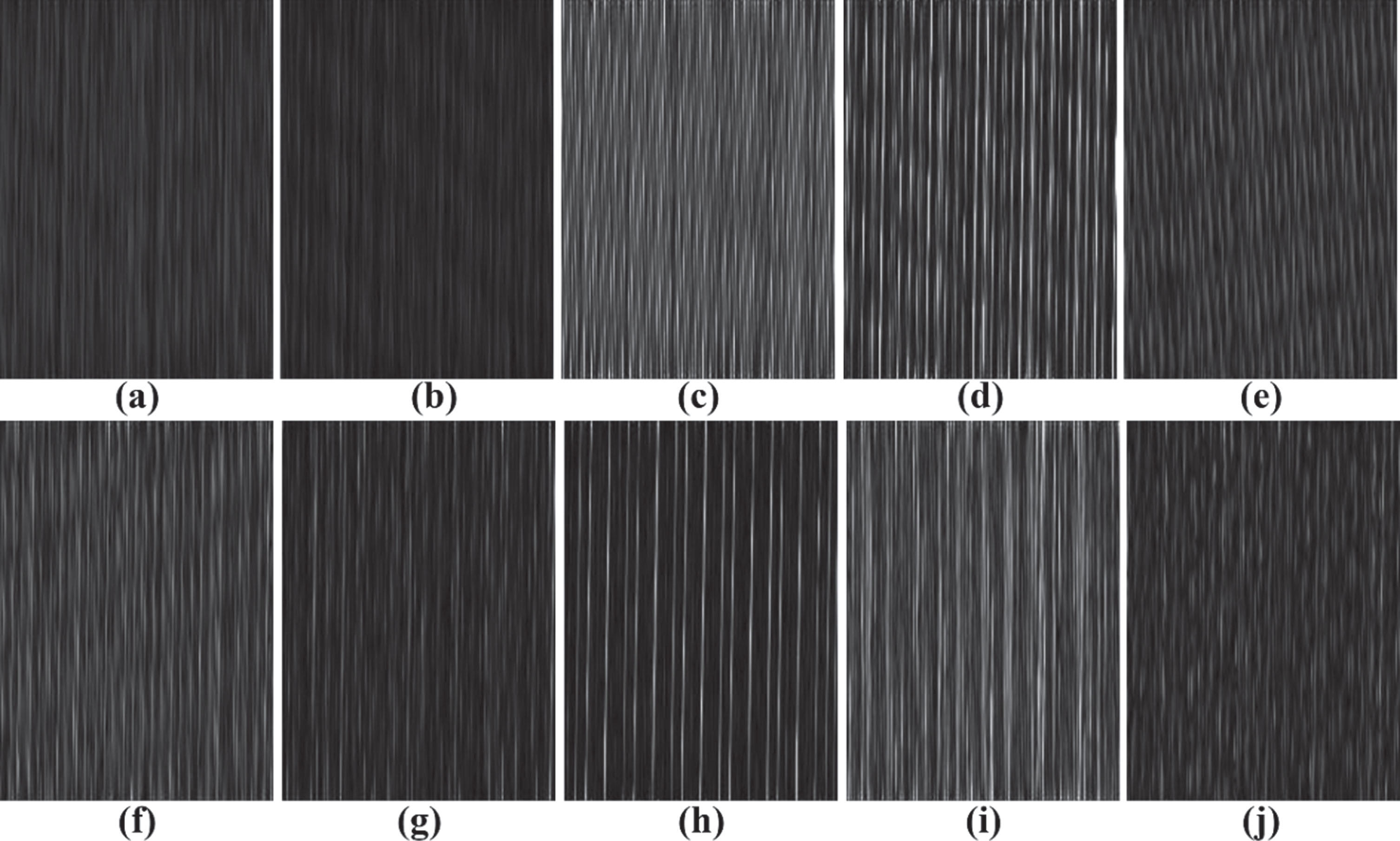
Sample VMD Hilbert spectrums for 10 different fault classes for CWRU bearing dataset (a) Ball B007, (b) Ball B021, (c) Centered OR007, (d) Centered OR021, (e) Inner Race IR007, (f) Inner race IR021, (g) Opposite OR007, (h) Opposite OR021, (i) Orthogonal OR007, (j) Orthogonal OR021.
Configuration of the multi-class bearing dataset illustrated for IMF0

Milling data [63] is another dataset that is more non-stationary in nature and used in this research to show the effectiveness of the proposed approach. The 167 struct array including the elements such as Case, Run, VB, Time, DOC, Feed, Material, smcAC, smcDC, Vib_Table, Vib_Spindle, and AE_Table and AE_Spindle lets up the milling data. This struct array is made up of 167 recordings from the experiment, and we use the vibration data from the vib-spindle to analyse it. The VB data for each recording indicates the tool’s flank wear and tear after the experiment. We took into account two examples in our analysis, fault and normal. Data with less wear and tear are assumed to be normal class, while data with excessive wear and tear are considered faults class (equivalent to VB > 3).
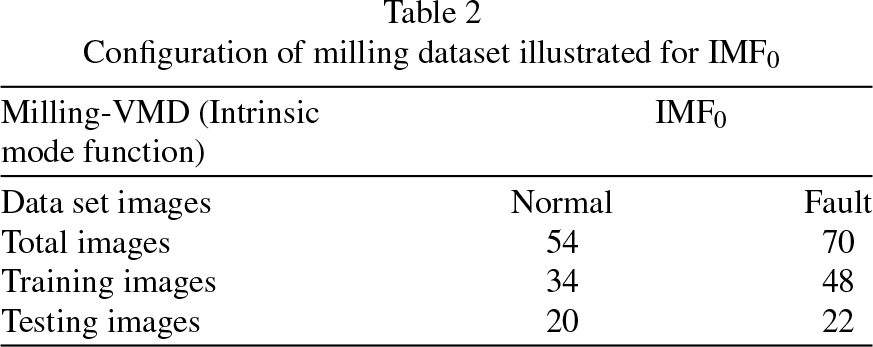
Following the procedures as discussed in Subsection 3.1 the original vibration signals from the bearing dataset are divided into M components and R IMF signals are obtained using EMD and VMD. The first four IMF signals are subsequently taken into focus, and Hilbert is applied to each IMF signal before being transformed to image data with N = 256, resulting in 54 × 4 images representing various faults for IMF0 as shown in Table 2 similarly for IMF1, IMF2 and IMF3.
Configuration of milling dataset illustrated for IMF0
Configuration of milling dataset illustrated for IMF0
Model parameters of DCNN

To prove that VMD analysis is better than EMD analysis the milling dataset which is more nonstationary in nature than the bearing dataset is used. This is because the IMF components of VMD analysis are free of aliasing noise. To show the nonstationary nature of the milling dataset a statistical analysis of each vibration signal is done. Vibration signals in the milling dataset are divided into good and bad vibration sets. For a given set the vibration signal is separated into consecutive frames and the mean is calculated for every frame and stored as a row in a matrix. This is done for every vibration signal and the matrix is filled. Thus, two different matrices are obtained for two different sets of good and fault. This matrix represents how the mean varies across the time for every vibration signal. The surf plot for the matrices is obtained & plotted in Fig. 7. From the surf plot, it can be observed that the variation of the mean value is large (maximum of 15*1031). Similarly, the experiment is done for different classes of bearing data, as shown in Fig. 8 and it can be observed the values range up to 0.05. This scale indicates that the variation of the mean across time is much larger for milling data than that for bearing data from which we can infer milling dataset is more nonstationary in nature.

Surf plot of milling dataset statistical analysis (a) Good data (b) Bad data.
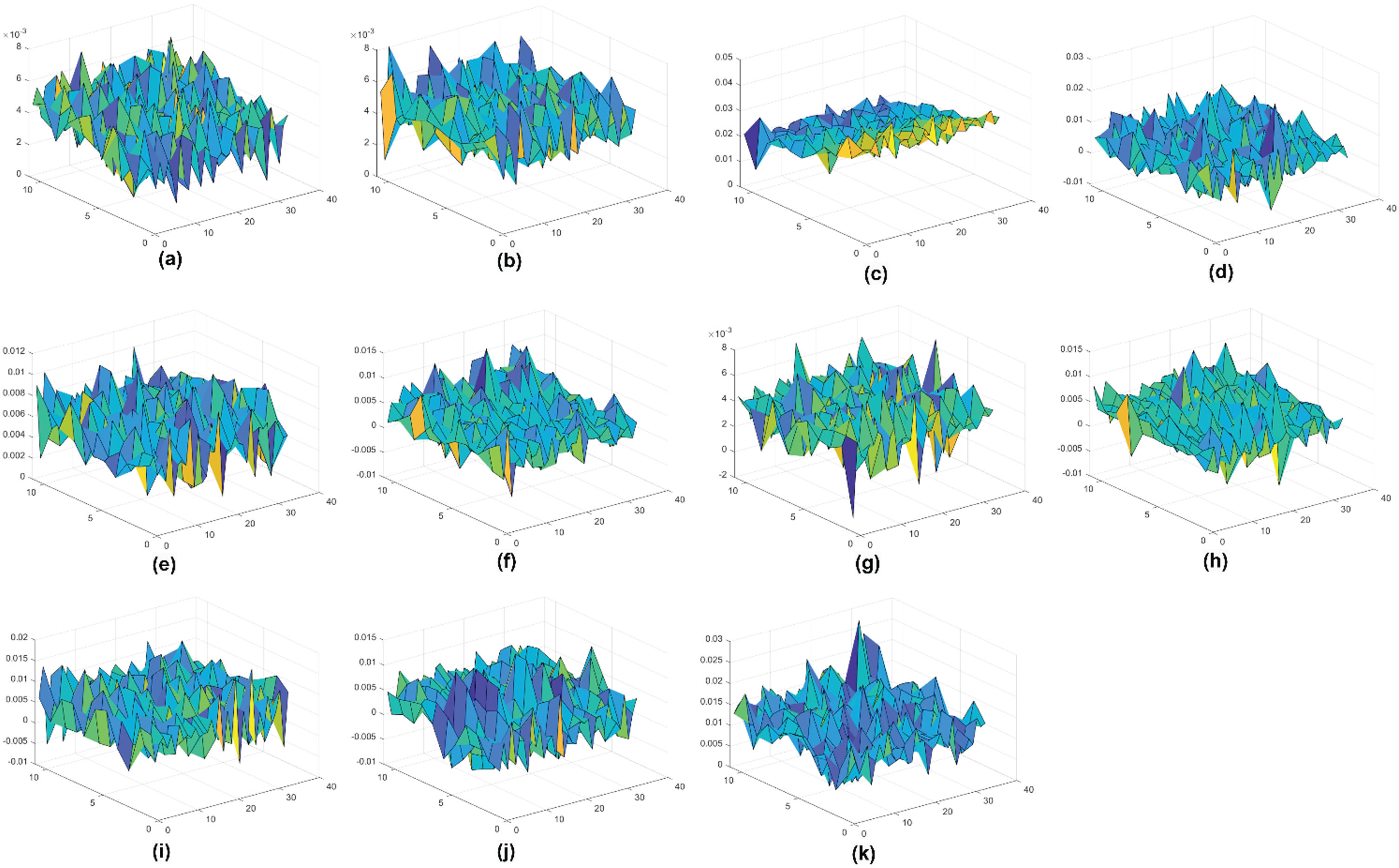
Surf plot of bearing dataset statistical analysis for 10 fault classes and normal (a) ball-0.007, (b) ball-0.21, (c) centered-0.007, (d) centered-0.21, (e) inner race-0.007, (f) inner race-0.21, (g) oppo-site-0.007, (h) opposite-0.21, (i) orthogonal-0.007, (j) orthogonal-0.21, (k) normal.
The numerical demonstration works well with DCNN because the method uses images for categorization. A CNN is a feed-forward neural network that preserves the real connections between neurons. It is carried out based on the neurological system of living beings and now has implications for artificial intelligence, recommendation systems, and the processing of natural language. Consequently, convolutional filters learn the characteristics of the images automatically, and CNN is a technique with a remarkable ability to learn features reliably and sensitively. The CNN architecture comprises three layers: a convolutional layer, a sub-sampling layer, and a fully connected layer. Using one of the gradient-based optimization techniques, the parameters of the proposed model were computed. For a faster convergence, the parameters were updated using the Adam optimizer. The proposed deep CNN model contains two convolutional layers with 64, (3) and 128, (3) filters, respectively, as shown in Fig. 9. Two max-pooling layers with 2×2 pooling sizes were also utilized. Before being fed into the CNN model, the input photographs are resized to 64×64 pixels. The ReLU (Rectified Linear Units) activation function was used to incorporate nonlinearity at each level, enabling CNN to train sophisticated models. The suggested model was able to distinguish between the dominant and low-level features during training and classify texture images using a fully connected layer.

DCNN architecture.
In this study, we proposed to represent vibration signals as images and apply DCNN directly on the images, eliminating the feature extraction signal processing block. We investigated the method of using the Hilbert transform as an image representation technique. Hilbert imaging is performed in ways on the IMF signals obtained using VMD and empirical mode decomposition (EMD). The images obtained are used to train the DCNN to classify the faulty signal and the experiment is conducted on ten different fault data to bring out good models with better training and validation accuracies. This research shows the merits of VMD and EMD based imaging. As already discussed, it is proposed to use EMD analysis and VMD analysis on two different datasets the bearing data set and milling data set which is more non-stationary than the bearing data set as illustrated in Subsection 3.4.
Inference from DCNN learning of bearing dataset
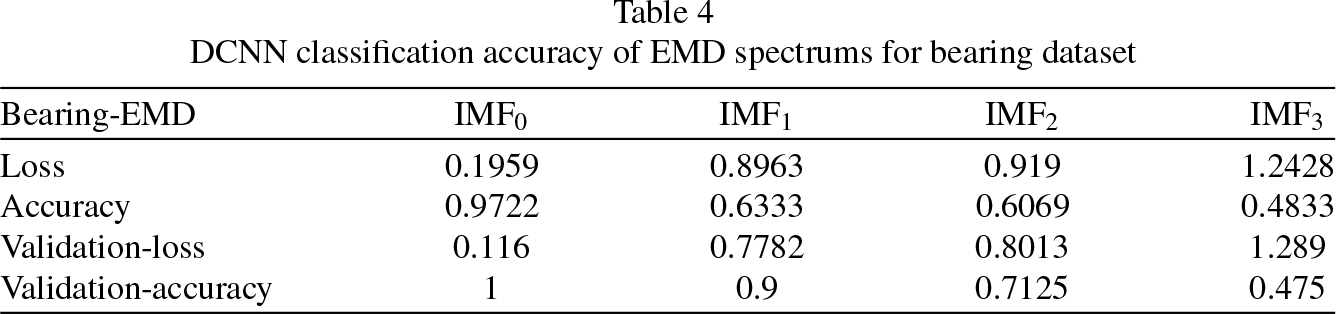
The training and testing samples are given in Table 1. The CNN learning is applied to the bearing dataset as shown in Table 1 for both the set of EMD and VMD IMFs based spectrums and the performance metrics of the ML model are shown in Tables 4&5 respectively. From Table 4 it can be inferred that among the four EMD-IMFs, EMD-IMF0 based spectrums ML model has a training accuracy of 0.9722 with a validation accuracy of 1. From Table 5 it can be inferred that among four VMD- IMFs both IMF0 & IMF1 based spectrums ML model have validation accuracy of 1 thanks to aliasing free VMD-IMF components.
DCNN classification accuracy of EMD spectrums for bearing dataset
DCNN classification accuracy of EMD spectrums for bearing dataset
DCNN classification accuracy of VMD spectrums for bearing dataset

Table 4 summarizes the CNN model learning accuracy results for the bearing data dataset images shown in Table 1. Figure 10 displays the model accuracy and validation accuracy for all EMD IMFs of the bearing dataset for the epoch. Figure 11 depicts the confusion matrix for all EMD IMFs for a random experiment.
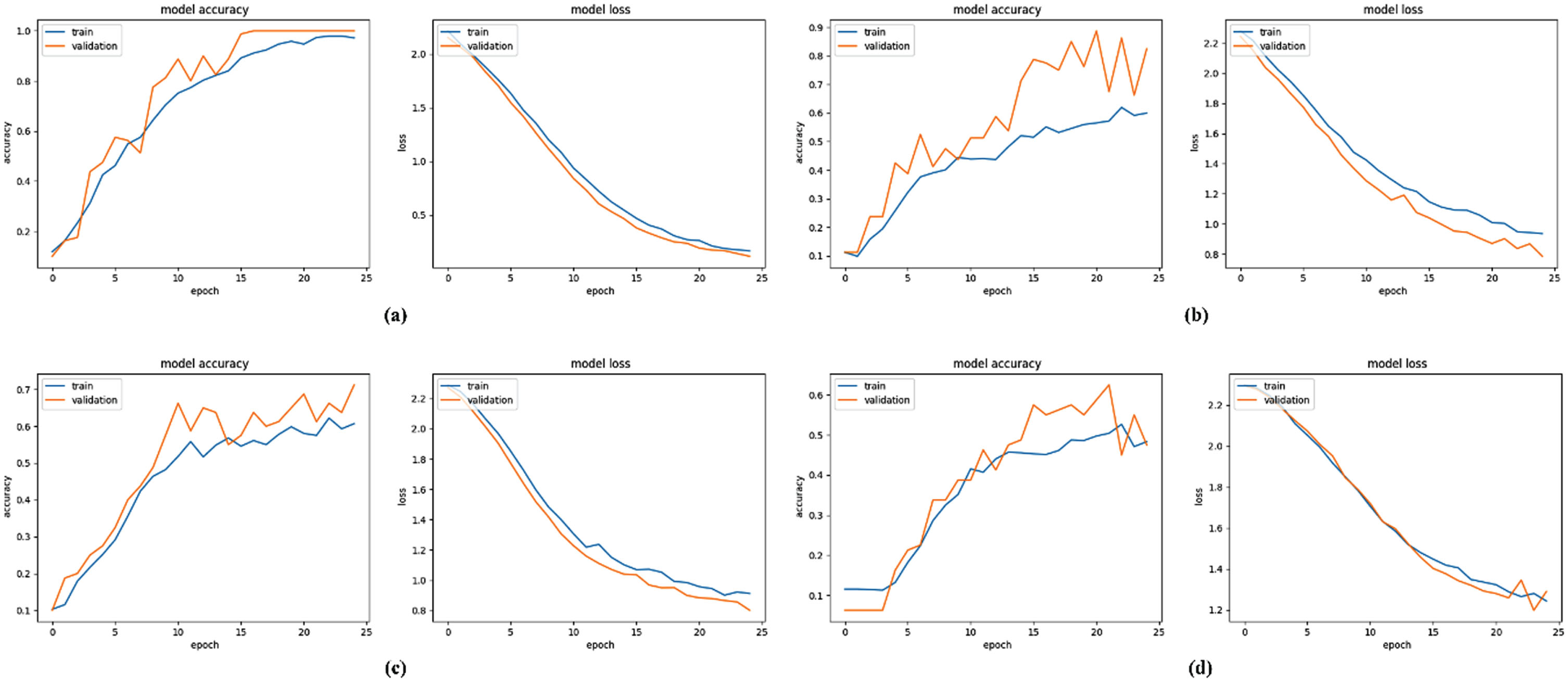
DCNN model accuracies and loss against epoch for EMD analysis of bearing dataset (a) IMF0, (b) IMF1, (c) IMF2, (d) IMF3.

DCNN model confusion-matrix for EMD analysis of bearing dataset (a) IMF0, (b) IMF1, (c) IMF2, (d) IMF3.
Table 5 summarizes the CNN model learning accuracy results for the bearing data dataset images shown in Table 1. Figure 12 displays the model accuracy and validation accuracy for all VMD IMFs of the bearing dataset for the epoch. Figure 13 depicts the confusion matrix for all VMD IMFs for a random experiment.
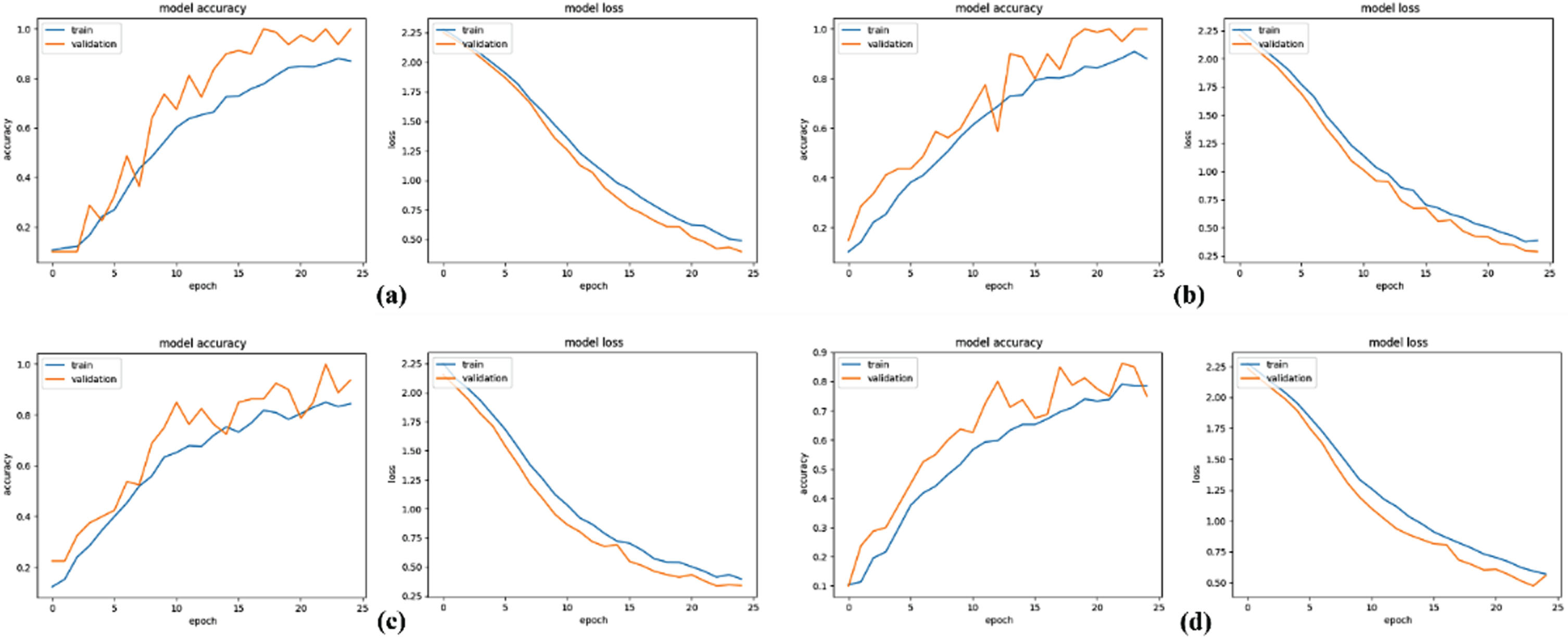
DCNN model accuracies and loss against epoch for VMD analysis of bearing dataset (a) IMF0, (b) IMF1, (c) IMF2, (d) IMF3.

DCNN model confusion-matrix for VMD analysis of bearing dataset (a) IMF0, (b) IMF1, (c) IMF2, (d) IMF3.
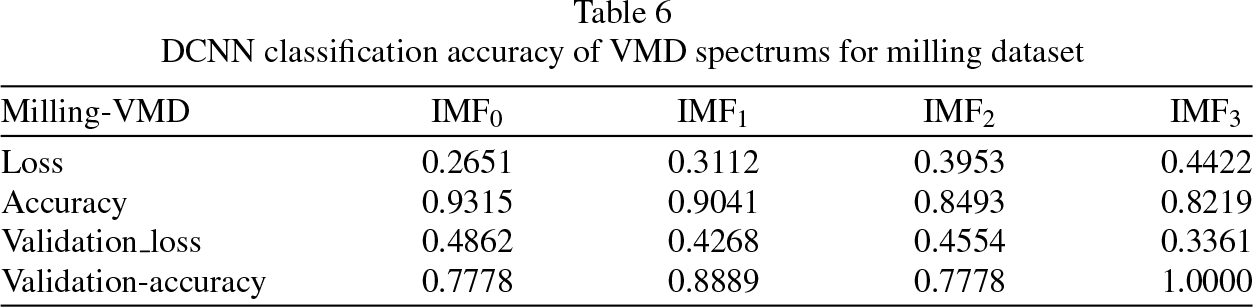
To bring out the performance improvement of VMD analysis for non-stationary signals the milling dataset is considered. In a recent work [32] EMD analysis of a milling dataset results in an ML model with a validation accuracy of 0.8125 for the IMF0 spectrum. The CNN learning is applied to the milling dataset as shown in Table 2 for the set of VMD IMFs based spectrums and the performance metrics of the ML model are shown in Table 6. From Table 6 it can be inferred that among four IMFs both IMF1 and IMF3 based spectrums ML model has validation accuracy of 0.888 and 1.0 respectively thanks to aliasing free IMF components.
DCNN classification accuracy of VMD spectrums for milling dataset
DCNN classification accuracy of VMD spectrums for milling dataset
Table 6 summarizes the CNN model learning accuracy results for the milling data dataset images shown in Table 2. Figure 14 displays the model accuracy and validation accuracy for all VMD IMFs of the milling dataset for the epoch.
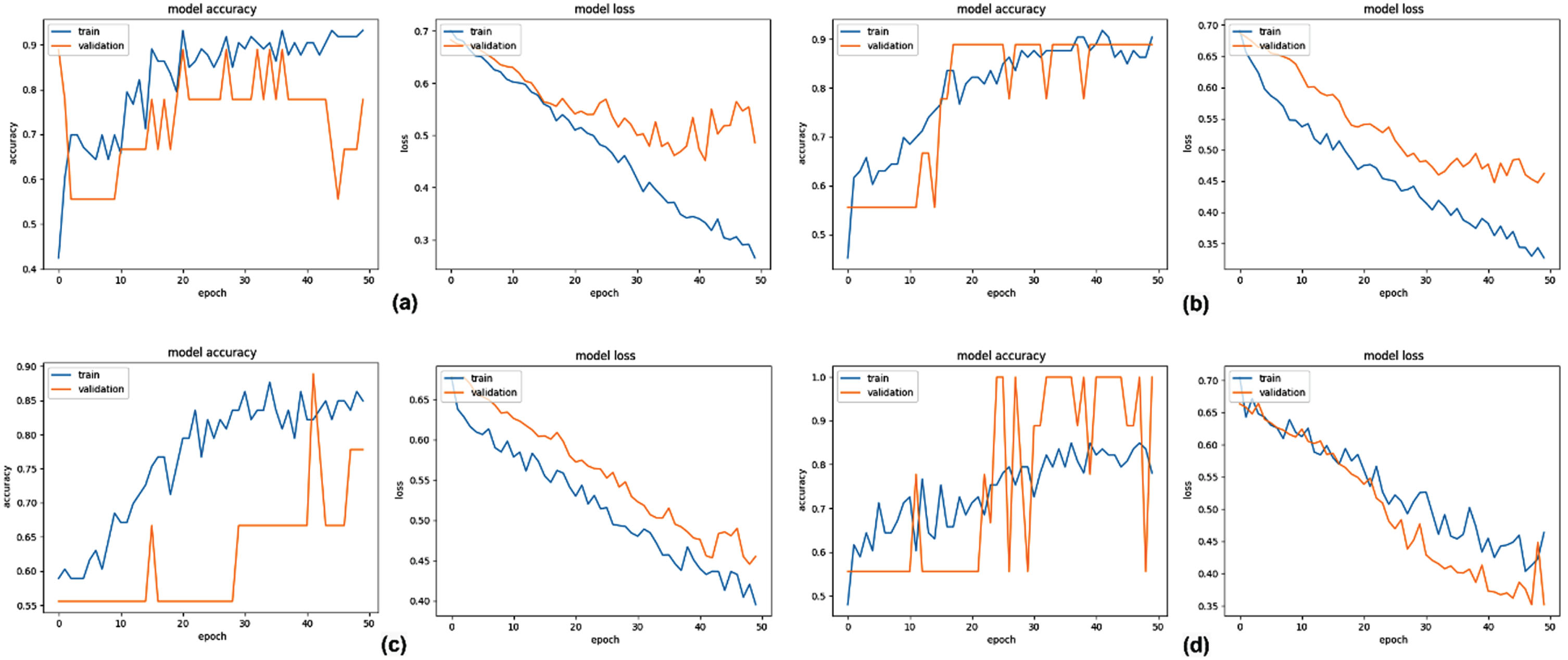
DCNN model accuracies and loss against epoch for VMD analysis of milling dataset (a) IMF0, (b) IMF1, (c) IMF2, (d) IMF3.
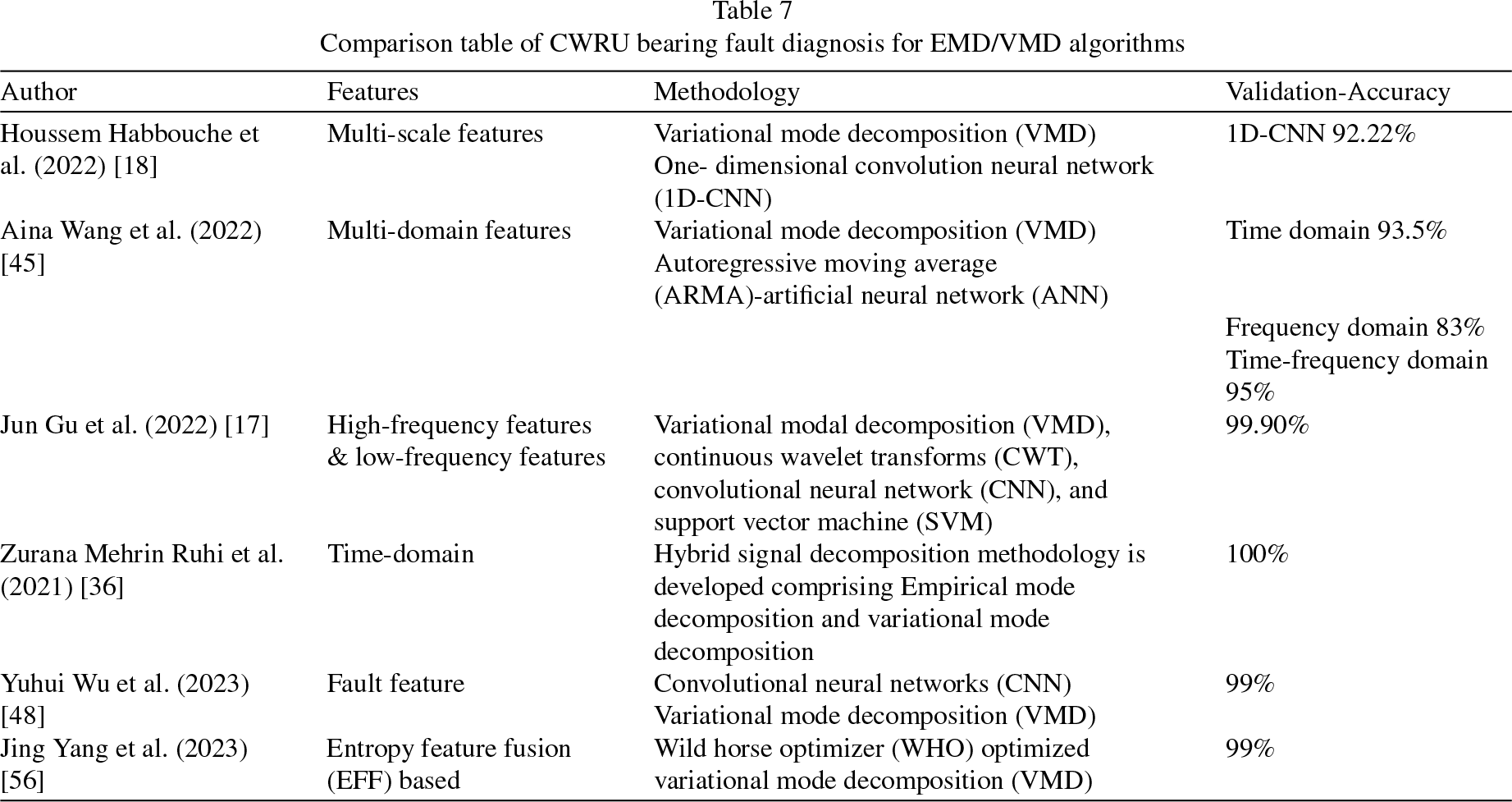
In this present paper, the Hilbert spectrum images of IMFs of EMD/VMD signals of the CWRU bearing dataset are proposed for DCNN learning. The performance of EMD/VMD benchmark methods done on this bearing dataset is given in Table 7. In the present paper, both EMD/VMD spectrum based DCNN method being 100% validation accuracy (Tables 4 and 5) are on par or exceeds the performance of benchmark methods given in Table 7.
Comparison table of CWRU bearing fault diagnosis for EMD/VMD algorithms
Comparison table of CWRU bearing fault diagnosis for EMD/VMD algorithms
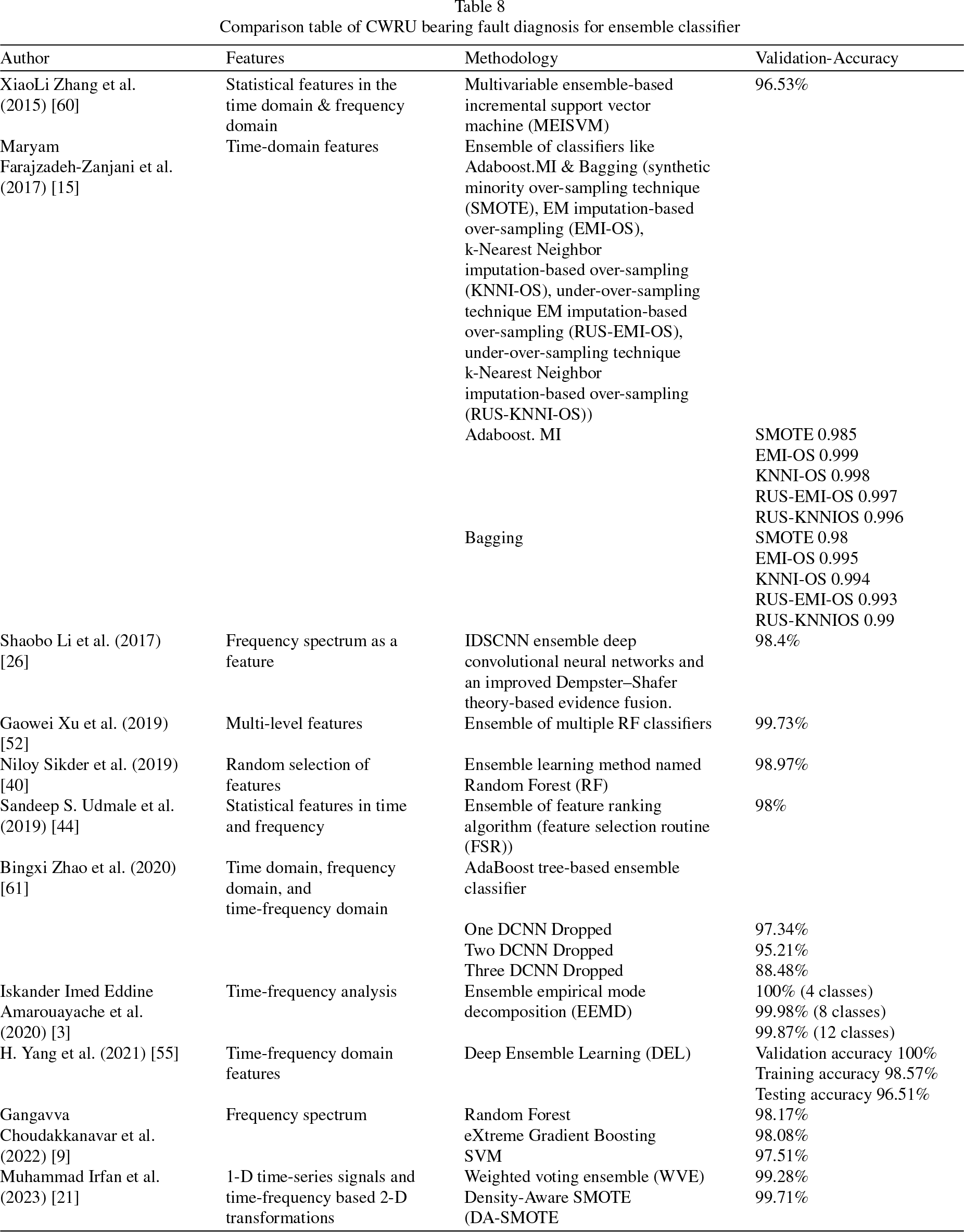
As already we discussed, the proposed method involves multiple CNNs (4 in number) and if a voting system is used to select the best output this scheme will be similar to EL. The performance of EL based benchmark methods done on this bearing dataset is given in Table 8. In the present paper, both EMD/VMD spectrum based DCNN method being 100% validation accuracy (Tables 4 and 5) are on par or exceeds the performance of benchmark EL methods given in Table 8. Though the present method is similar to EL method in terms of multiple CNN training, it is actually different from EL methods as there is no voting mechanism. Among four CNN one of the CNN is 100% accurate as given in Table 5 the need for a voting scheme is eliminated. But in future in a constrained noisy environment the EL learning can be applied in this scenario. It should be noted that the proposed problem is done for multi-class classification and 100% validation accuracy CWRU bearing dataset for IMF0 and IMF1 implies that both IMF0 and IMF1 signals generalize all different 10 faults assumed in this work and for the final deployment either of these models can be used. In case none of the IMF signals gives 100% accuracy a voting scheme is required. It should also be noted that for the non-stationary milling dataset, 100% accuracy is observed for IMF3 signals. The merit of the proposed algorithm is that it needs only one CNN model which is the best model to be deployed finally minimizing the memory and computation cost.
Comparison table of CWRU bearing fault diagnosis for ensemble classifier
Comparison table of CWRU bearing fault diagnosis for ensemble classifier
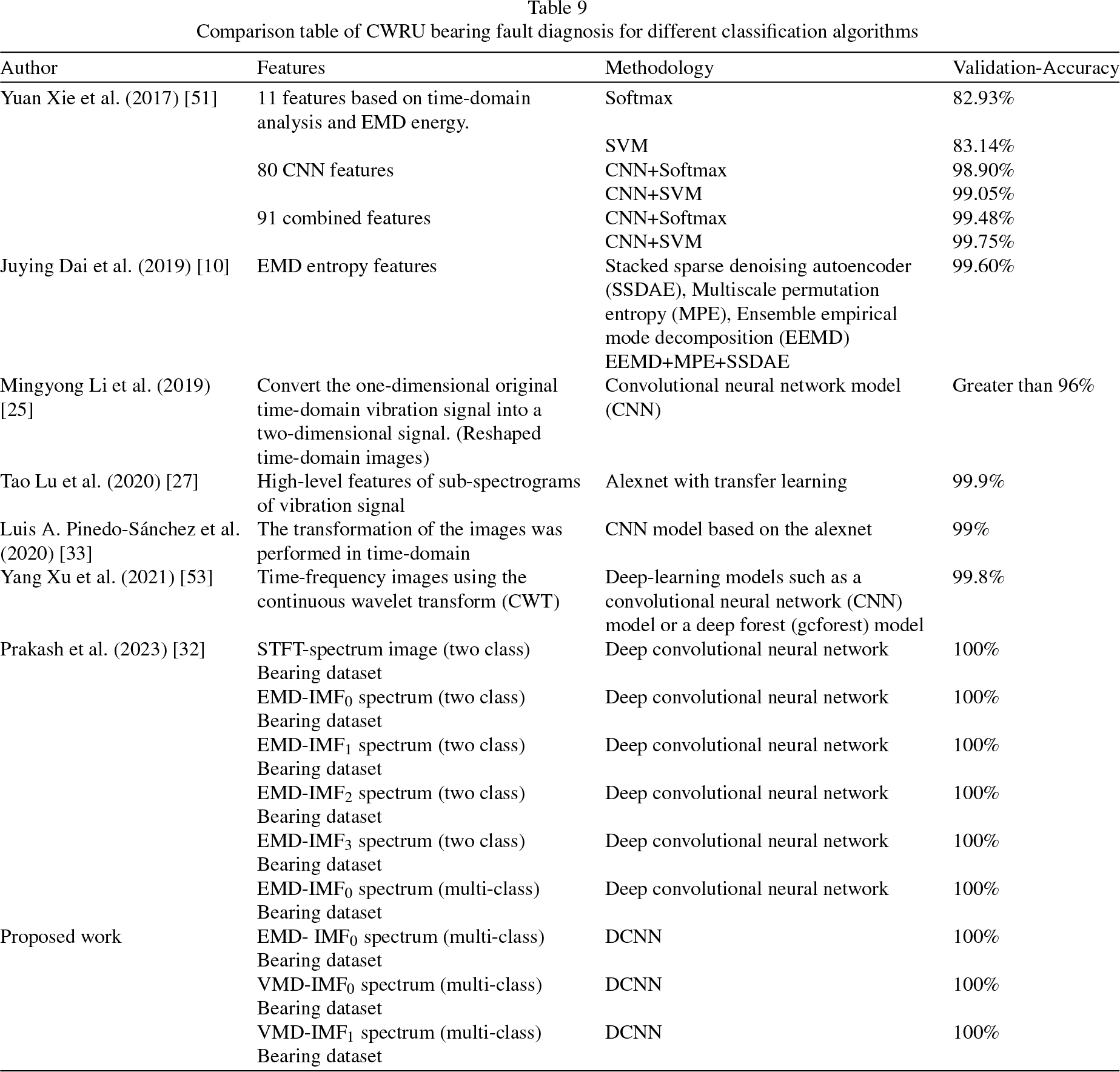
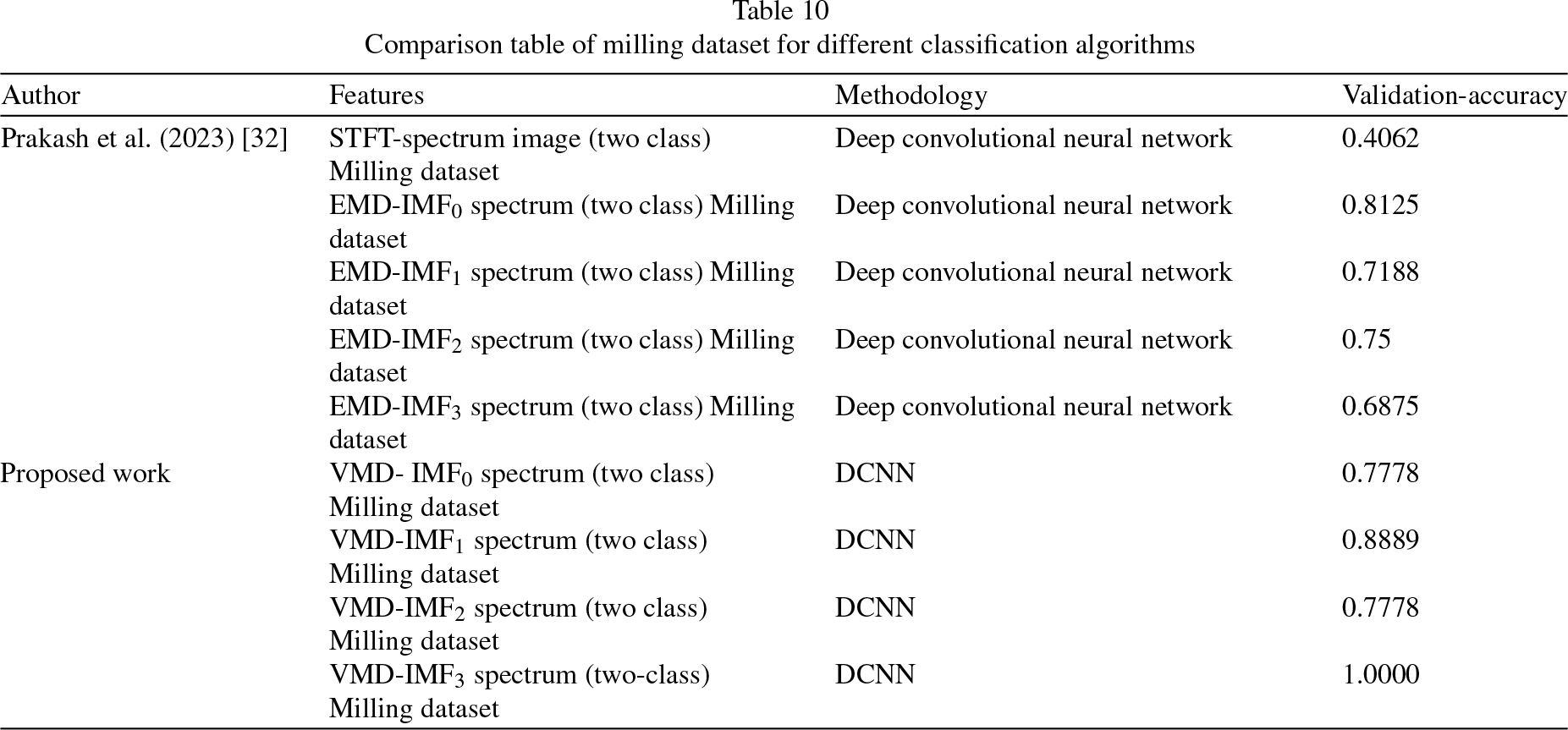
A comparison is given in Table 9 for the EMD and VMD methods done in this paper using DCNN benchmarked against state-of-the-art methods it can be observed that in DCNN VMD-based analysis outperforms for IMF0 & IMF1 and EMD-based analysis outperforms for IMF0 for multi-class classification in terms of validation accuracy and Table 10 shows the comparison of milling dataset which is more non-stationary in nature for EMD and VMD algorithm. The spectrum of VMD-IMF3 for two-class classification gives 100% validation accuracy and is much better than EMD analysis. Also, it can be seen that all approaches are improved by the VMD-based analysis working with DCNN in regards to validation accuracy. Table 11 shows the execution time of the proposed method with the DCNN model for bearing and milling datasets based on training and validation. The experiment is done in cloud platform and the system parameters are 11th Gen Intel(R) Core (TM) i5-1135G7 processor at a clock of 2.40 GHz with RAM of 8.00 GB, 64-bit operating system and Windows 11 with network band 2.4 GHz speed receiver/transmitter 144/144 (Mbps). The value mentioned is for the time taken for training and validation. The validation alone takes around 5 seconds and thus negligible.
Comparison table of CWRU bearing fault diagnosis for different classification algorithms
Comparison table of CWRU bearing fault diagnosis for different classification algorithms
Comparison table of milling dataset for different classification algorithms
Performance comparison of proposed methods with DCNN models

By analysing all the results discussed above, the following are the key inference points that are derived from the numerical experiment done for Unlike using the energy and entropy parameters of EMD-IMFs of a vibration signal to classify machine faults a different approach is used in which spectrogram images of IMF signal are used in DCNN learning. It is proposed to bring out the merits of aliasing free VMD-IMF over EMD-IMF and it is shown that the validation accuracy of all the four IMFs is better for VMD over EMD. Two of the VMD-IMFs IMF0 and IMF1 result in an 100% validation accuracy. To further bring out the robustness of the VMD approach, VMD is applied to the milling dataset which is the more non-stationary bearing dataset. The result obtained is 100% validation accuracy for IMF3 which is better than the EMD method of 81% validation accuracy shown in our recent work [32]. The merits of the proposed VMD approach over the EL approach are that the proposed approach uses the best IMF function that gives 100% validation accuracy and needs only one CNN model to be deployed in the application.
Numerical experiments are conducted to determine the efficacy of VMD analysis of vibration signals using DCNN to classify machine faults. The idea of representing IMF components obtained by EMD and VMD as Hilbert spectral images and trained in DCNN to classify the machine faults is demonstrated using CWRU bearing dataset for 10 different fault classes. The model accuracies are tabulated and plotted against the epochs. The results show that one of the four IMFs (IMF0) of the EMD method gives a validation accuracy of 100% and two of the four IMFs (IMF0 & IMF1) of the VMD method give a validation accuracy of 100%. It is also shown that the validation accuracy of all four IMFs of VMD is better than the EMD method. The confusion matrix is obtained and depicted for this 10-class problem which also supports that VMD based analysis is better than EMD based analysis. To substantiate this statement, the VMD based DCNN experiment is repeated for a different non-stationary dataset (milling dataset) for a binary class problem and it is shown that the IMF3 component gives an accuracy of 100% which is very high for an EMD based method demonstrated using DCNN in previous work for the same dataset with a maximum validation accuracy of 81%. The proposed method is compared with the state-of-the-art work and it is evident that VMD based analysis outperforms all other methods. It is also better than the popular EL algorithm as it requires the deployment of one single best model in the application end. The future scope identified for this work is to extend the idea for noisy vibration signals by optimally searching the best possible number of IMFs using heuristic algorithms and to fuse the best results for a better outcome in an EL based framework.