
Abstract
This paper demonstrates a fuzzy decentralized dynamic surface control (DSC) scheme for switched large-scale interconnected nonlinear systems under arbitrary switching, which contains non-strict feedback form and unknown input saturation uncertainties. An auxiliary design system is established to handled input saturation. Uncertainties of non-strict feedback form are learned by fuzzy logic systems (FLSs) approximators, DSC method is designed to conquer “explosion of complexity” inherented by repeated differential of virtute controller in backstepping approach. Ii is shown that based on common Lyapunov function (CLF) design and analysis scheme, all the closed-loop systems signals are uniformly ultimately bounded (UUB), simulation results are provided to demonstrate the effectiveness of this proposed strategy.
Keywords
Introduction
The approximation-based adaptive control algorithms of Non-Strict Feedback (NSF) Form nonlinear systems have developed as a significantly challenging problem in practical engineering [1–12]. NSF contained all the states functions has a more general form, traditional strict-feedback and pure-feedback forms as its special forms, how to design and compensate this performance has attracted a lot of attention [2–13]. Variable separation technique [2–4] as a typical scheme to deal with the NSF structure has been researched a lot these years, such as adaptive fuzzy tracking control scheme and multi input multi output (MIMO) nonlinear systems, even stochastic nonlinear NSF systems were analyzed in [2–4], subsequently, adaptive neural full-state constraints control with unmodeled dynamics and input time-delay systems were considered in [5, 6]. Neural network (NN) reinforcement learning (RL) control has extended to discrete-time systems [7]. fuzzy logic systems (FLSs) approximation-based observer control, asymptotically non-singular convergent tracking error control, and finite-time large-scale nonlinear systems have extended to NSF structure [8–12]. But these results does not consider the more complex practical switched nonlinear systems.
As a classical hybrid system, switched nonlinear system arise in many practical fields, including autonomous systems, network protocol routings and so on, where they would been modeled with switched topology systems [13–22]. Subsequently, finite-time fault-tolerant control technique has been developed in [13, 14] addressed switched stochastic nonlinear systems, event-triggered control (ETC) was redescribed for practical time-delay systems with finite-time output feedback stabilization [15] and linear programming [16]. [17] generated the consensus interconnected switched multi-agent systems, output feedback ETC scheme is put forward for switched sensor failures nonlinear systems [18], adaptive NN approximation-based periodic ETC output-feedback for switched nonlinear systems was illustrated in [19], decentralised control for LSSs with backlash like hysteresis and output constraints [20]. Switched-observer-based ETC funnel [21] and dynamic NN technique [22] are considered for switched nonlinear systems respectively. And these results mainly focused on the switched nonlinear systems in the form of strict-feedback or pure-feedback, not consider the more complex NFS form. In [23–26] for switched nonlinear systems in NFS, several adaptive fuzzy control approaches were proposed.
Nevertheless, these above backstepping-based techniques results computational expansion problem due to the repeated differentiation of virtual controllers. D. Swaroop proposed a DSC technique by introducing a first-order low-pass filter [27], and J. Farrell explored the command filtered backstepping [28] scheme, which would effectively alleviate the computational explosion. Subsequently, dynamic surface control (DSC) scheme was extended to systems with full state constraints and unmodeled dynamics [29] and systems in NFS form [30–34]. [35] exploited DSC to MIMO output-feedback switched nonlinear systems with unknown gain signs, [36] considered command filtered approach for stochastic time-delayed NFS with unknown input saturation and [37] discussed DSC with switched large-scale systems, However, these results based-on DSC or command filtered approaches did not consider Large-scale Switched Nonlinear systems(LSSNs) or did not consider NFS form with the uncertainty of input saturation, in addition, these results with input saturation uncertainty [38, 39] did not consider LSSNs or DSC scheme. And for the NFS [3–7] based-on variable separation technique which required unknown functions satisfying the property of monotonically increasing.
Consider the above-mentioned factors, a fuzzy decentralized tracking DSC architectural is investigated for the LSSNs in NFS form with uncertainty input saturation. During the controller and adaptive laws design process, NFS form, uncertain input saturation, general interconnections, and arbitrary switchings are discussed simultaneously. The main contributions can be summarized as follows:
1) This paper analyzes a more general systems which contain interconnected switched systems in NSF form and uncertainty of input saturation. Obviously, the systems investigated in [10, 37] would be regard as particular cases of this system.
2) This proposed technique does not require the unknown function to be restrictively monotonically increasing [3–7, 40] and existing bounding functions as their bounds, when dealing with NSF structured systems with non-affine states, which is more general for application in practical engineering.
3) By employing the fuzzy approximation-based DSC technique, the virtual controllers design calculation process is simplified and the computational expansion problem can be successfully resolved compared with [10, 39].
Problem statements and preliminaries
Preliminaries formulation and system descriptions
Consider a class of LSSNs with input saturation in NSF form, which composed of N interconnected relevant subsystems:
The nonlinearity input saturation
Here, u
N
is a known parameter which denotes the boundary of
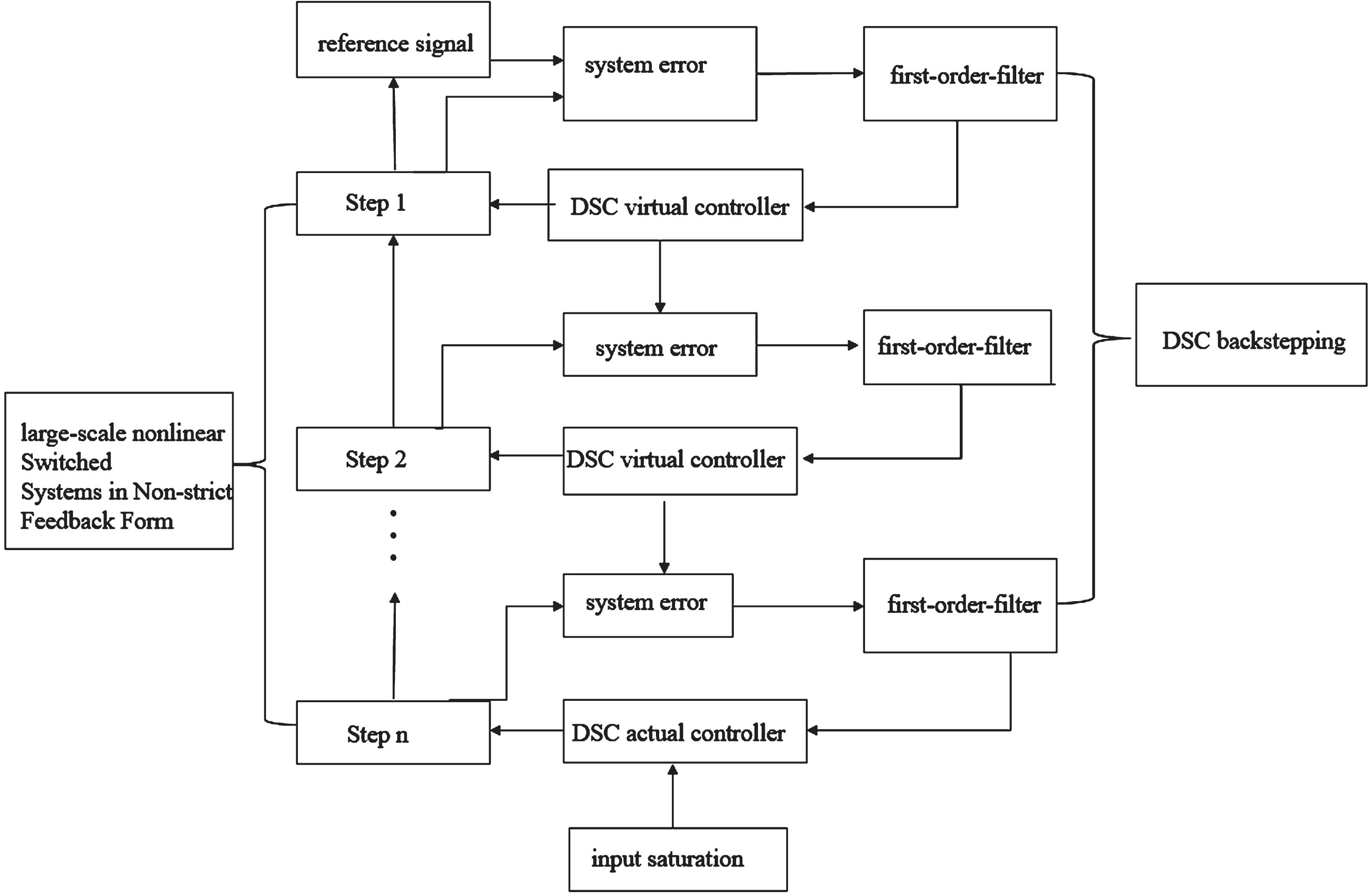
Block diagram of the presented DSC decentralized control design.
The control objective is to design adaptive robust DSC decentralized fuzzy controller
FLSs is employed to compensate the unknown smooth functions. The lth fuzzy if-then rule defined as
Where
Then, the FLSs (2) can be rewritten as follows:
Adaptive fuzzy DSC designing performance
The adaptive fuzzy DSC tracking controller design is based on the following transformations coordinates for i = 1, 2, … N, j = 2, 3, … n
i
, k ∈ {1, 2, …, M}:
where
Introduce a new variable
From (5) and (20), the jth filter error
and
Consider the n
i
th part in plant (1) of the ith subsystem, and
Introduce a new variable
From (5) and (27), the n
i
th filter error
The main result of this paper can be summarized by the following theorem.
By completing the squares, we have
Define ci(k) = min {ci1, ci2, …, c
in
i
, ρi1, ρi2, …, ρ
in
i
, i = 1, 2, …, N},
Multiplying both sides of the above Equation (39) by e
c
0
t
, and it can be rewritten as
In this subsection, based on two inverted pendulums composed of nonlinear spring friction and damper connections [41], a simulation example will illustrate the effectiveness and feasibility of this proposed fuzzy decentralized DSC-filter switched tracking control technique.
The objective of this simulation for this second-order system is to apply the proposed decentralized fuzzy DSC-based tracking approach to design controllers and adaptive laws:
1) All the signals in the closed-loop system are UUB,
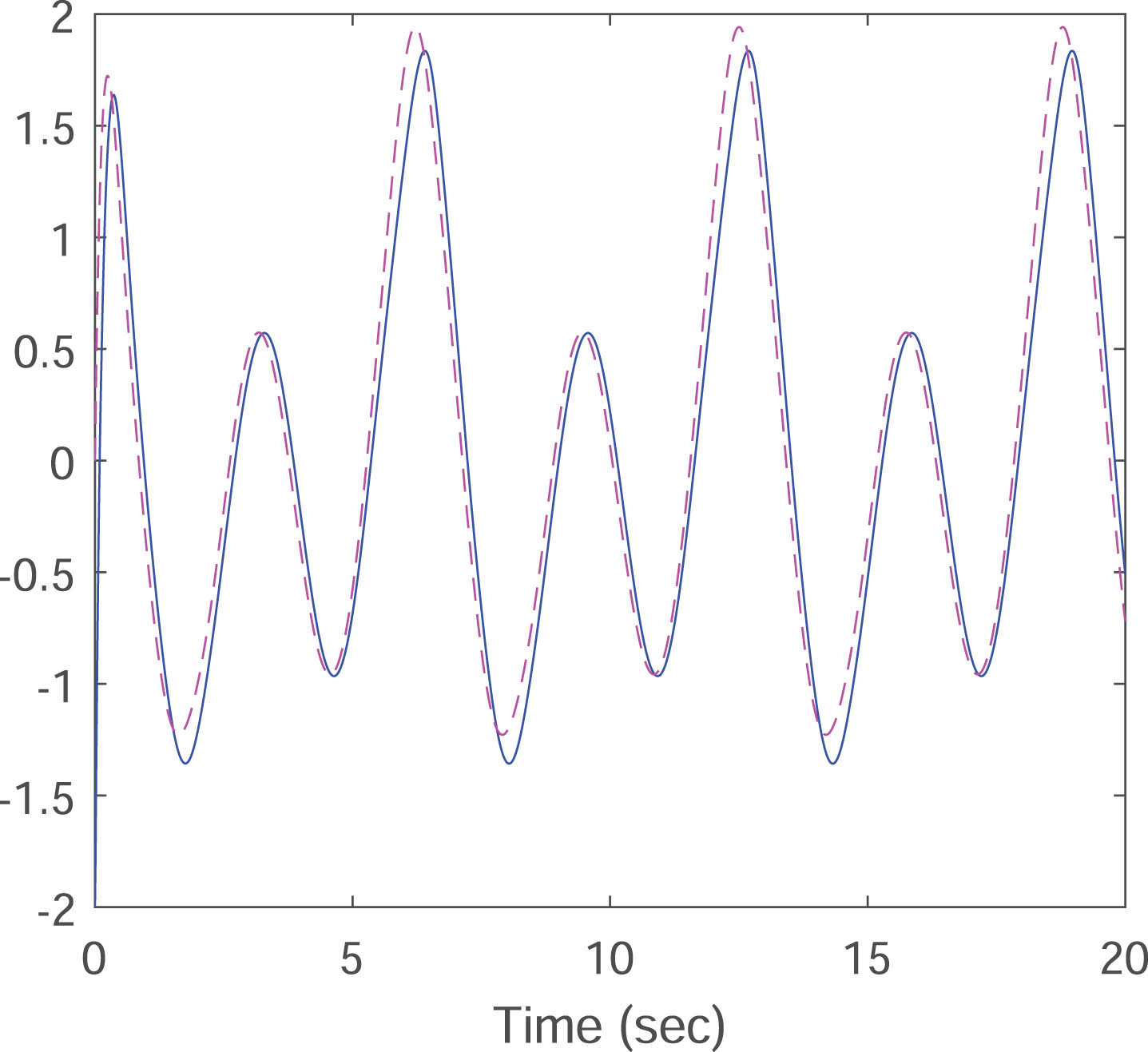
2) The output y1 = x11, y2 = x21 would track the reference signal y1r = 0.5 sin(t) +0.5 sin(0.5t) and y2r = sin(t) + cos(0.5t) very well.
Fuzzy sets are defined over interval [-5, 5] the partitioning points are chosen as 5, 3, 1, 0, - 1, - 3, - 5, and the fuzzy membership functions are chosen as
Select the appropriately design parameters such that c11 = c12 = c21 = c22 = 0.5,
Choose the design initial values as x11 (0) = x12 (0) = x21 (0) = x22 (0) =0.01, the initial adaptive laws conditions are as
According to the design procedure of decentralized fuzzy DSC-based scheme in section 3, it is illustrated that the prescribed fuzzy approximation-based DSC architecture can guarantee the boundedness of the whole LSSNs in NSF form with input saturation.
Select the appropriately design parameters such that c11 = c12 = c21 = c22 = 0.5,
The simulation results are demonstrated in Figs. 2–7. Figures 2 and 3 illustrate the output trajectory y1, y2 can track the trajectory of reference signal y1d, y2d and the tracking trajectory of tracking error. Figures 4 and 5 demonstrate the responses of adaptive estimation of the adjusted parameters

Trajectory of reference signal y1r, output y1.
Trajectory of reference signal y2r, output y2.
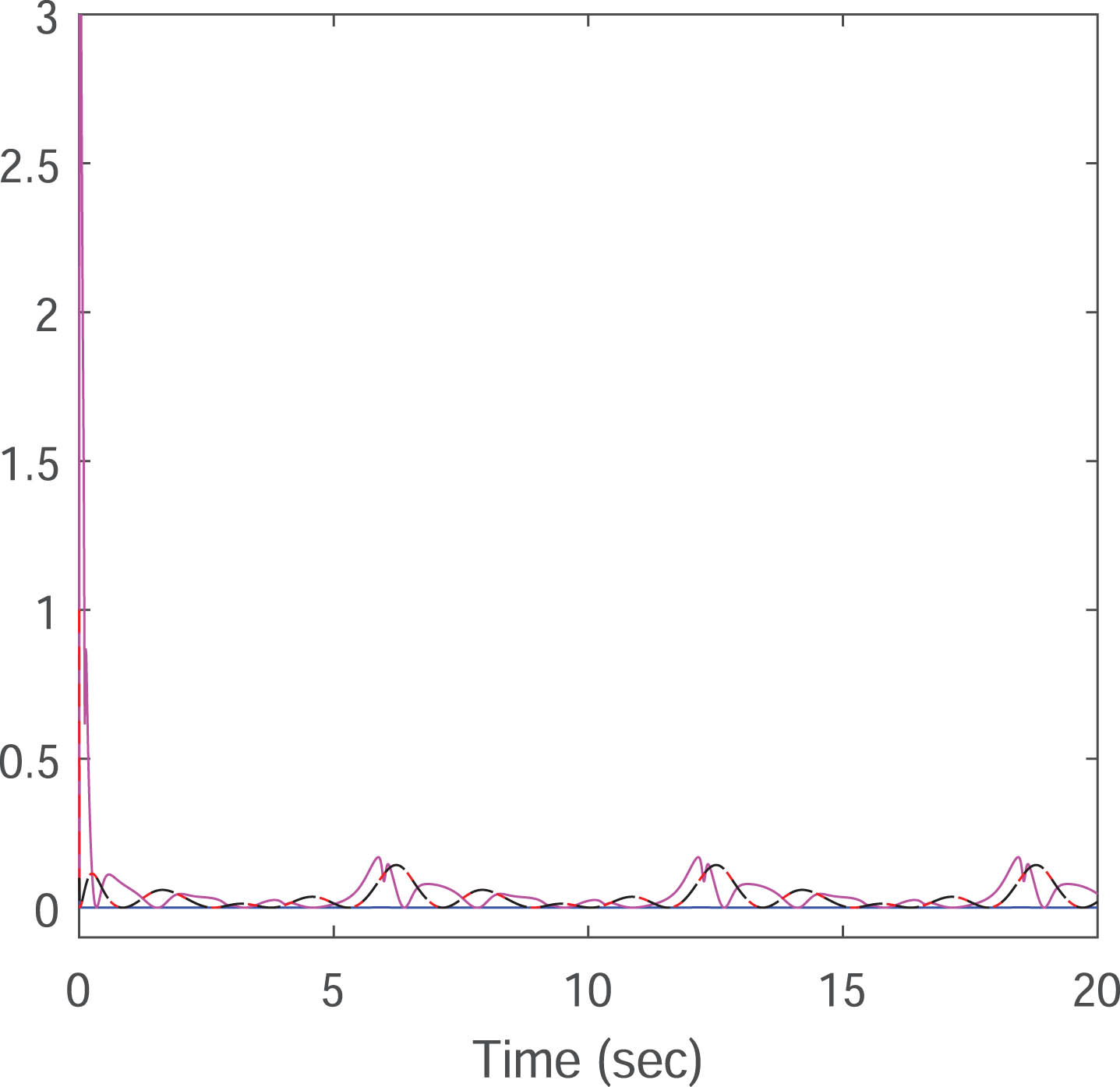
Trajectory of the estimation of
Trajectory of the estimation of

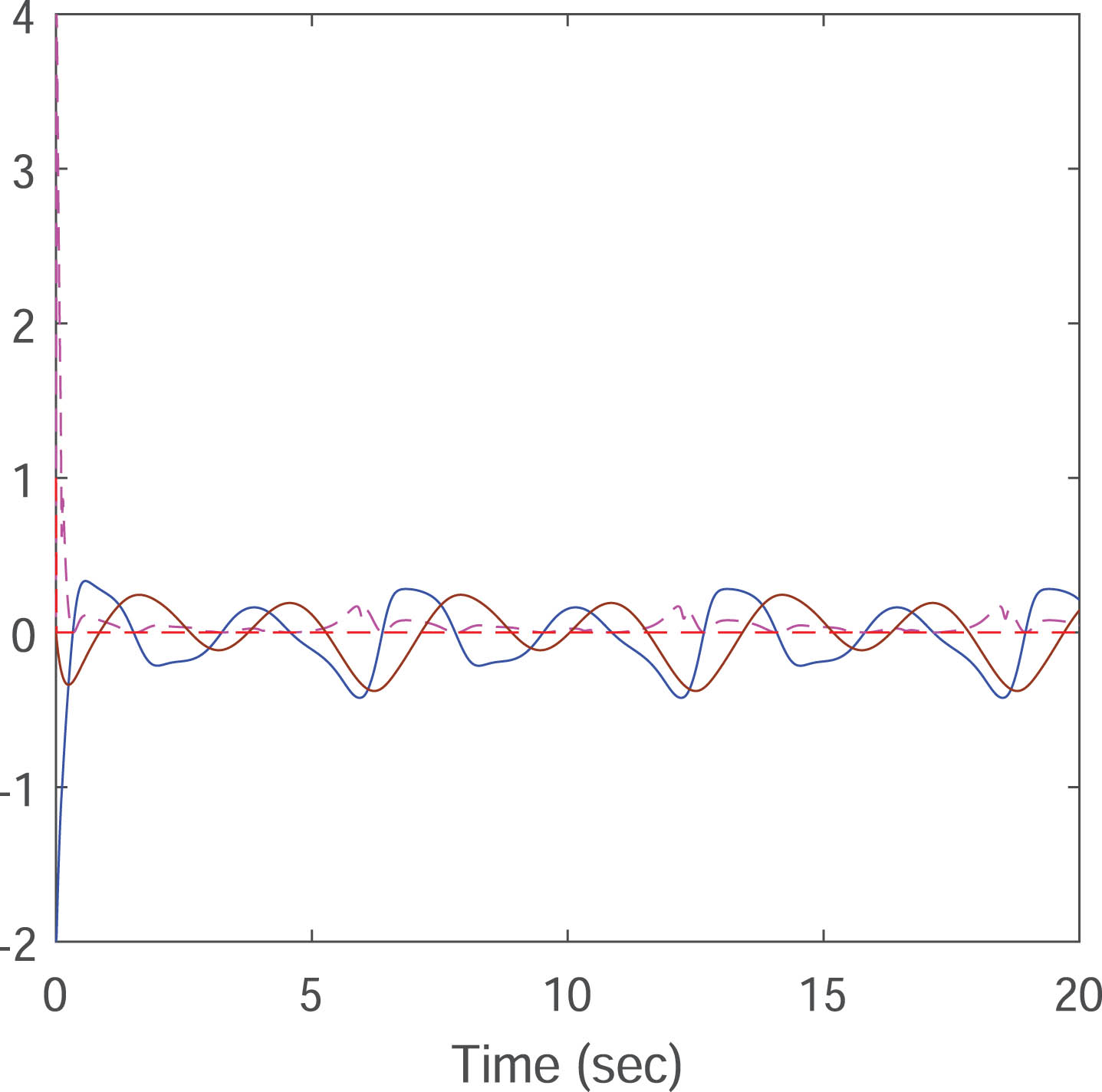
Trajectory of control input u1 (v1 (t)),u2 (v2 (t)).
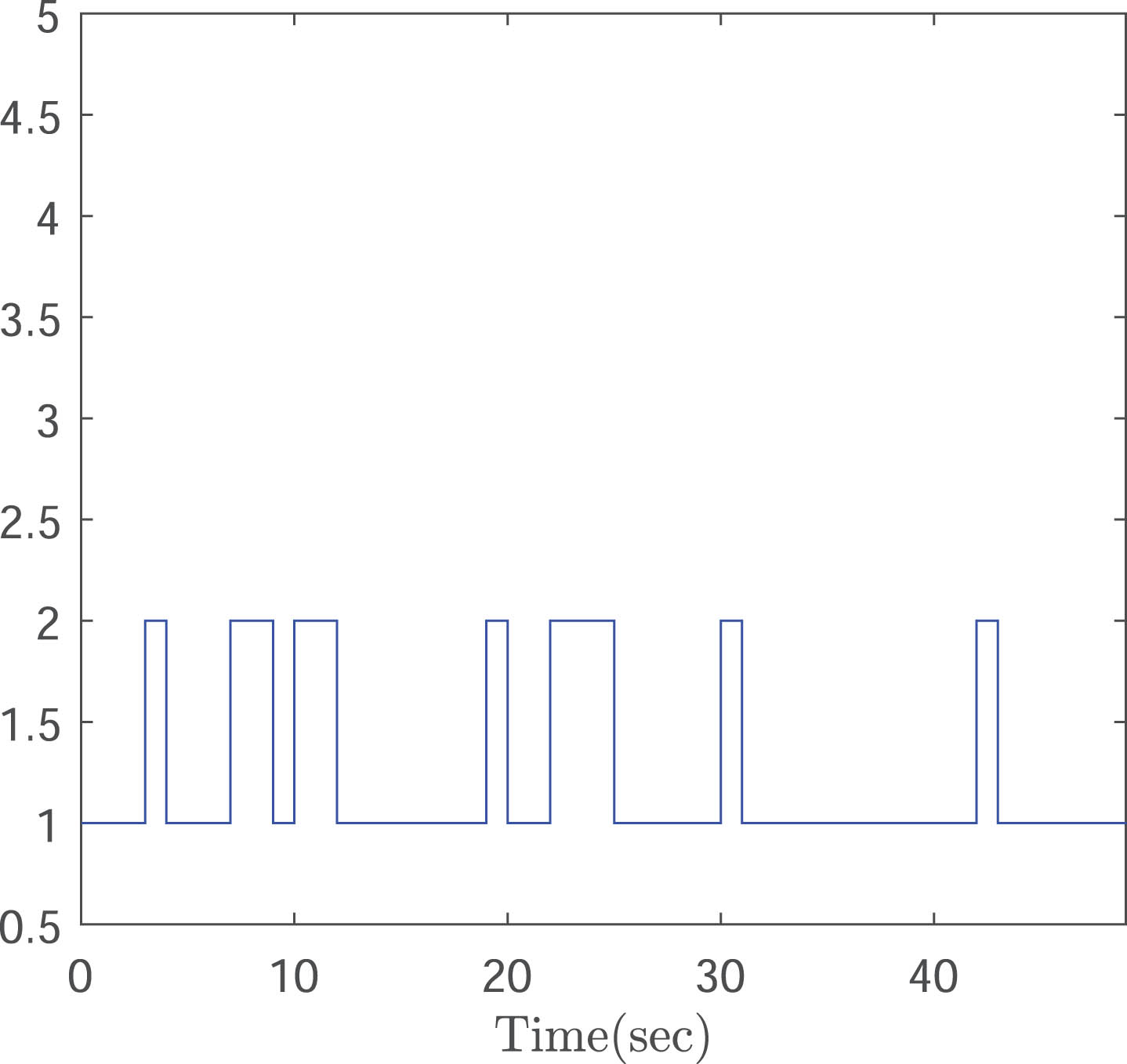
Switching signal σ (t).
The decentralized FLSs-approximation DSC-based tracking approach for the LSSNs in NSF structure with input saturation under arbitrary switching has been investigated in this paper. The unknown uncertainties of the NSF structure were approximated by FLSs, auxiliary design system was adopted to handle input saturation. The UUB of all states can be guaranteed based on constructing CLF and Lyapunov theorem analysis, system output would track the desired signal very well. This proposed technique can eliminate computational expansion problem inherented by recursive differentiated virtute controller and can compensate uncertainties, input saturation and deal with the NSF forms of included non-affine structure states, which is more general for application in practical engineering. Furthermore, simulation results demonstrated the feasibility of the presented scheme. In future, we will combine the deep learning techniques [42] and DSC algorithm to the nonlinear switching systems or design switching signals and dwell time or consider the infinite-time condition and constraint problem in future.
Acknowledgments
This work was supported in part by National Natural Science Foundation of China (Nos. 12102236, 11971065, 62025303), in part by Natural Science Foundation of Shanxi Province (Nos. 20210302124258, 202203021211334).