
Abstract
An improved Ant Colony Optimization (ACO) algorithm, named IACO, is proposed to address the inherent limitation of slow convergence, susceptibility to local optima and excessive number of inflection in traditional ACO when solving path planning problems. To this end, firstly, the search direction number is expanded from 4 or 8 into 32; Secondly, the distance heuristic information is replaced by an area heuristic function, which deviated from the traditional approach that only considers pheromone information between two points; Then, the influence of path angle and number of turns is taken into account in the local pheromone update. Additionally, a reward and punishment mechanism is employed in the global pheromone update to adjust the pheromone concentrations of different paths; Furthermore, an adaptive update strategy for pheromone volatility factor adaptive is proposed to expand the search range of the algorithm. Finally, simulation experiments are conducted under various scenarios to verify the superiority and effectiveness of the proposed algorithm.
Introduction
The increasing prevalence of mobile robot attributed to the rapid development of the high technology, among various technologies, path planning stands out as a core technology that enables mobile robots to perform tasks effectively [1–6]. Path planning entails the ability to navigate from a specified start point to an end point in a safe and collision-free manner within an environment considering criteria such as path length, travel time and travel cost [7–11]. In general, path planning is an optimization problem, and numerous algorithms have been proposed to address it. Initially, algorithms like Artificial Potential Field (APF) [12] and Rapidly-exploring Random Trees (RRT) [13], were proposed to solve the problem. Furthermore, intelligent algorithms such as Particle Swarm Optimization (PSO) [14], Genetic Algorithm (GA) [15], Ant Colony Optimization (ACO) [16] and Artificial Neural Networks (ANNs) [17] have been employed to obtain the optimal paths for the mobile robots. Beyond meta-heuristic search approaches, alterative blind search methods, such as Breadth First Search (BFS) [18] and Depth First search (DFS) [19] are also available. These methods are straightforward to implement and invariably arrive at a solution eventually. Nevertheless, when dealing with extensive and intricate test cases, optimization methods can often yield some of the quickest and most effective solutions.
Among the aforementioned algorithms, ACO is a method which has strong global optimization capability and the ability to easily integrate with other algorithms, making it well-suited for problems such as global path planning for robots [20–23]. Notably, Dorigo et al. [24] proposed an enhanced ACO inspired by the foraging behavior of ant colonies in nature. Compared to other algorithms, ACO has the advantage of not requiring highly optimized initial routes and exhibits robustness. Its positive feedback mechanism facilitates continuous convergence during the search process, ultimately leading to an optimal solution. Additionally, the distributed computation employed in the search process allows for parallel computation by multiple individuals, significantly enhancing computational efficiency and operational effectiveness of the algorithm [25–27]. However, practical applications have revealed that the ACO algorithm is prone to slow convergence, redundant planning paths, and local optima, many scholars have made significant improvement to the algorithm from various perspectives [28–34].
Li et al. [35] proposed an ACO algorithm based on an adaptive greedy strategy, allowed the ant colony to continuously explore areas with high pheromone concentrations. Miao et al. [36] introduced an improved adaptive ACO algorithm that incorporated an angular guidance factor in the transfer probability, a heuristic information adaptive adjustment factor and an adaptive pheromone volatility factor in the pheromone update rule, respectively. They also proposed a multi-objective performance index to transform the path planning problem into a multi-objective optimization problem. Luo et al. [37] constructed the initial pheromone allocation unequally, employed a pseudo-random state transfer rules is employed for path selection, and a dynamic penalty method is introduced to solve the deadlock problem. Li et al. [38] proposed a new ACO algorithm that can reduce the number of access node and select more feasible directions by extracting feature points as access nodes, the location of the selected feature points determines the range of the pathfinding field of view, but the paths are not secure enough since their feature points are close to obstacles. Ajeil et al. [39] incorporated ant age modification into the ACO algorithm and implemented grid-based static and dynamic environment modeling to solve path planning problems. Yang et al. [40] divided path planning into two parts: path generation and trajectory optimization, they proposed a two-layer ACO algorithm where two algorithms run in different layer in parallel. Gao et al. [41] introduced a backtracking strategy and path merging strategy into ACO, and they developed a pheromone diffusion gradient formula that emphasizes the spreading of pheromones left on the path to form a gradient distribution in the region. Ali et al. [42] utilized the information from A* multidirectional algorithm to determine the nearest region for the search and established a trajectory evaluation model to improve the path quality. However, the A* multidirectional algorithm in this study alone does not sufficiently select the best nodes enough to complete the global path.
Although the aforementioned literature has made improvements to the path planning performance of ACO for mobile robots, it fails to adequately consider the global search capability of paths, path security and path smoothing. Building upon these gaps, this paper presents the main research focus. The contributions of this paper are outlined as follows. Improved 32 search directions: The paper proposes an enhancement to the ACO algorithm by introducing 32 search directions. This allows for a wider range of choices and a larger search range during the path search process, leading to improved exploration capabilities. Area-based heuristic information calculation: A novel method for calculating heuristic information based on the area is designed. This method takes into account the characteristics of the surrounding environment, providing more accurate guidance for path selection. Consideration of turn angle and turn point: The paper considers the effects of turn angles and turn points in the process of pheromone updating. By incorporating these factors, the proposed method aims to improve the smoothness of the generated paths, resulting in more efficient and natural trajectories. Adaptive update strategy for pheromone volatile factor: An adaptive update strategy for the pheromone volatile factor is presented. This strategy dynamically adjusts the volatility of pheromone based on the characteristics of the environment, allowing for better adaptability and performance in different scenarios. Development of a mathematical model: A mathematical model is developed, taking into account path length, convergence performance, and smoothness. This comprehensive model provides a balanced evaluation of the generated paths, ensuring a high-quality solution for the path planning problem. Simulation-based verification: The proposed method is validated through various simulations. These simulations assess the performance and effectiveness of the algorithm in different scenarios, providing empirical evidence to support the proposed contributions.
The rest of this paper is organized as follows: Section 2 briefly introduces the environmental modeling and problem modeling; Section 3 presents the traditional ant colony optimization; followed by a demonstration of the improved algorithm in Section 4; Section 5 provides the simulation results and analysis; whilst the conclusion and future work are presented in the final section.
Environmental and problem modeling
The ultimate target of mobile robot is minimizing the path length and the energy consumption while achieving the smoothest trajectory possible. For simplicity, assume the mobile robot operates in an environment with static obstacles and maintains a constant velocity. Additionally, the size of the robot is considered by expanding the obstacle [43].
Environmental modeling
There are three common used methods for environmental modeling: the grid method, the geometric method and the topological map method [44]. Among these methods, the grid method stands out due to its standardized representation and ease of implementation. Therefore, this paper chooses to adopt the grid method to build the environmental model.
As shown in Fig. 1, Fig. 1(a) illustrates an environment with obstacles of various shapes, while its corresponding grid map is depicted in Fig. 1(b). It is important to note that the shapes of obstacles may be irregular, requiring them to be expanded outward until they occupy the entire grid. Consequently, the modified grid map is shown in Fig. 1(c), where the obstacle grids are shaped in grey, and the white grids indicate the areas that are freely accessible to robots.
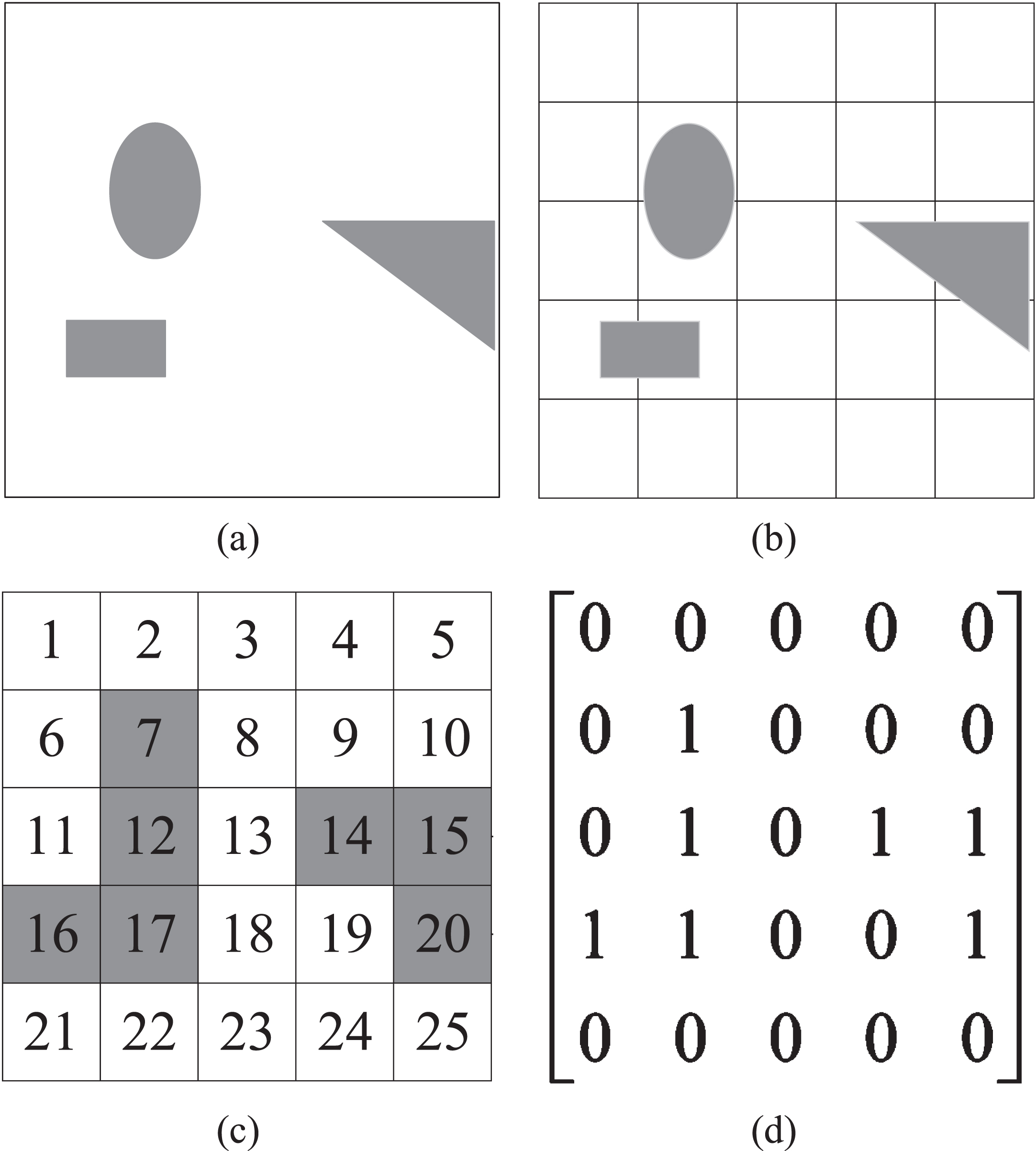
Grid map ((a) Original map; (b) Grid map; (c) Obstacle expanding; (d) Grid mapping matrix).
To convert the environmental information into data that can be utilized for the mathematical model, a serial of numbers are sequentially marked on the grid map, as shown in Fig. 1(c). This allows for the formation of a grid mapping matrix, as depicted in Fig. 1(d). In this matrix, a value of 1 represents a grid occupied by obstacle(s), while a value of 0 indicates a grid that is freely accessible.
For a grid map with coordinates, each grid is assigned a unique coordinate. In an x×y environment, the position corresponding to the i-th grid, denote as (x
i
, y
i
), can be represented by the following equation.
To ensure accurate and efficient path estimation, three evaluation indexes, namely path length, convergence performance, and smoothness, are utilized as the objective functions for the optimization problem. These indexes serve to determine whether the path is the optimal choice for the mobile robot.
Path length
Path length, denoted as L, directly estimates whether a path is the shortest path. It can be calculated using the following equation
The convergence performance index is influenced by the number of iterative convergence and time taken. A smaller number of iterative convergences and a shorter running time indicate faster algorithm convergence, better convergence performance, and a more optimal path. This relationship can be expressed in the following equation.
A smooth path ensures the robot’s movement is fluid and natural, thus minimizing energy consumption. Therefore, smoothness is considered an important factor in estimating the quality of a path. In this paper, path turning angle and the number of turning points are chosen as the primary influencing factors for smoothness evaluation. Without loss of generality, taking Fig. 2 as an example, and the calculation of its smoothness can be determined by Equation (5).
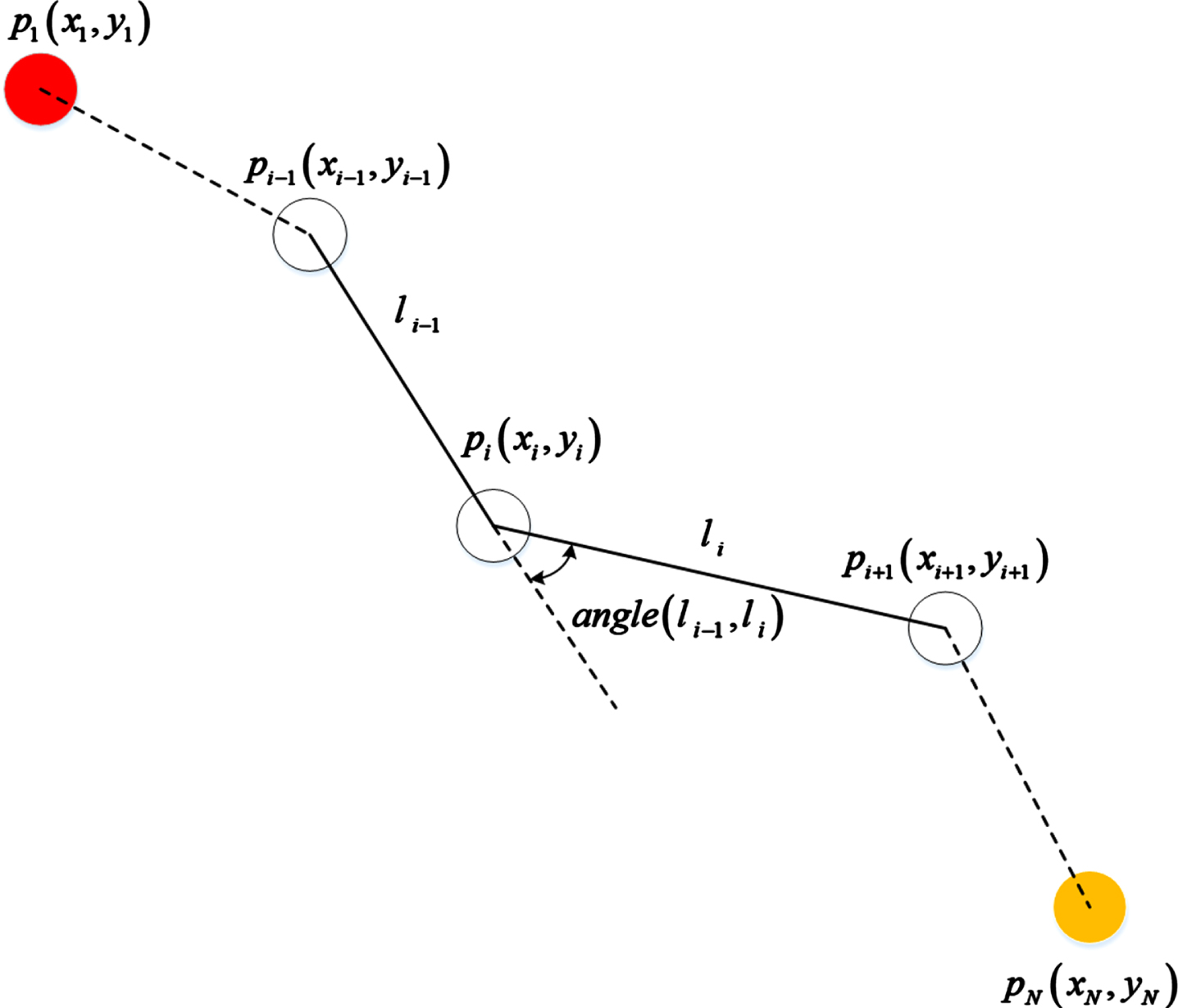
Schematic diagram of the path angle variable.
The ACO algorithm is a bio-inspired intelligence algorithm that mimics the forging behavioral characteristics of an ant colony. When ants search for food, they release a substance called pheromone, once the concentration of pheromone in a path is higher, the probability of ants choosing that path is corresponding higher [45]. Additionally, the probability of ants selecting a path is influences by the distance heuristic function, which can be expressed as Equation (7).
As previously discussed, ants deposit a specific quantity of pheromones when traversing, resulting in a gradual accumulation of pheromone concentration along the path. Simultaneously, the pheromone will also evaporate. After the entire population completes one iteration, the pheromone concentration on the path undergoes an update in accordance with Equations (9) and (10).
To better solve the shortcomings of traditional ACO algorithm, this paper improves four parts of the algorithm, including search method, heuristic function, pheromone update mechanism and pheromone volatile factor.
Search method
Apparently, ants can move in any direction, except where there are obstacles, to search for food sources. However, in the traditional grid-based ACO algorithms, the effective search direction and search field of ants are limited by the small number of available directions. Typically, ACO has 4 or 8 search directions and fields (refer to Fig. 3(a)) and (b)), which is not particularly practical. To enhance the precision of the search range and improve path optimization, this paper increases the search direction of ants and the grid point of search field into 32 and 48, respectively, Fig. 3(c) illustrates this enhancement.
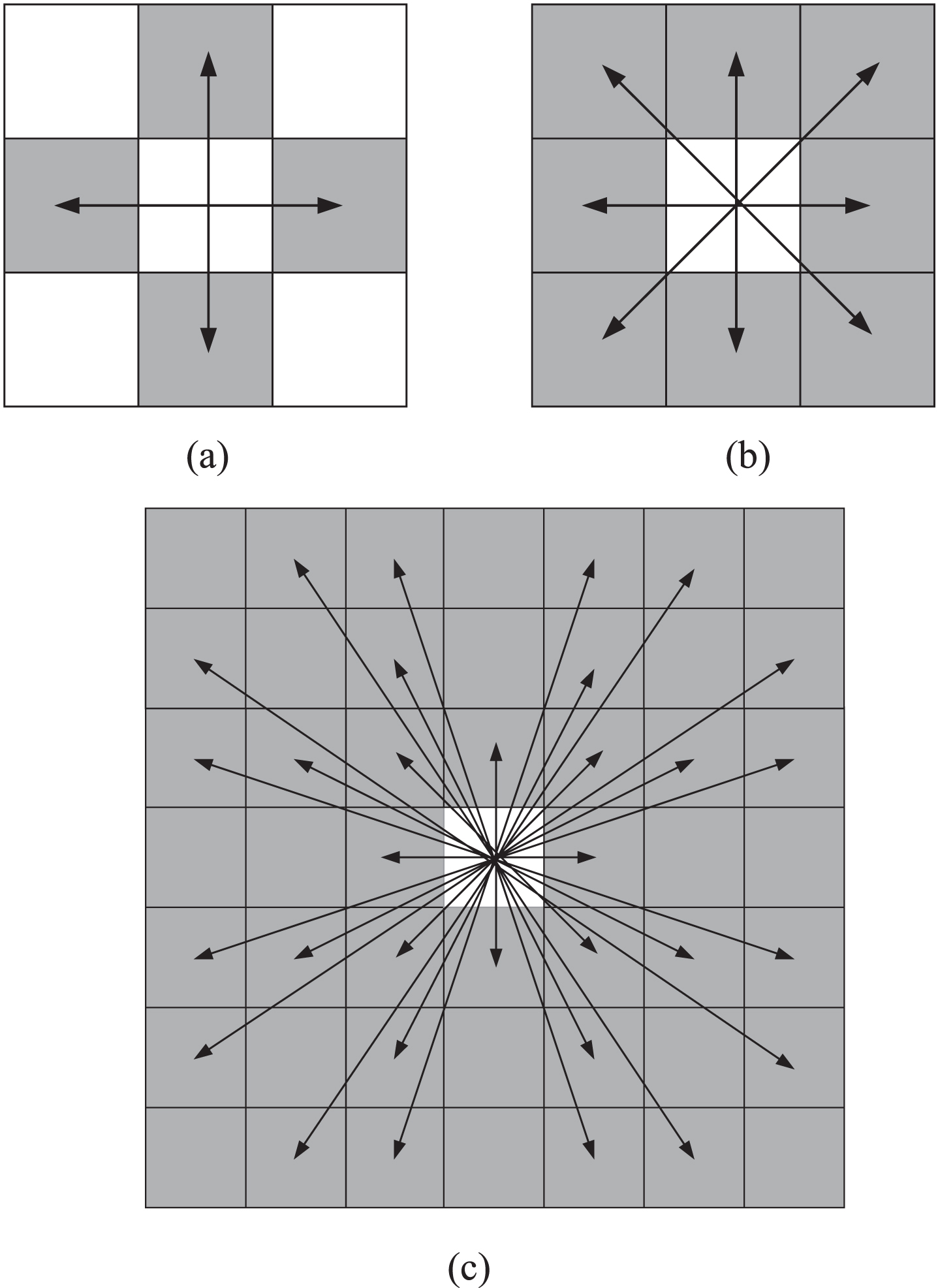
3 different ant search method directions((a) 4 search directions and 4 search fields; (b) 8 search directions and 8 search fields; (c) 32 search directions and 48 search fields).
The benefits of refined search direction and expanded search neighborhood for ants in finding shorter paths are highlighted. The advantage of the ant search strategy proposed in this paper, compared to the traditional approach, is illustrated through a simple example below.
As shown in Fig. 4, an ant starts at point S and reaches point E. Figure 4(a) and (b) depict the paths explored using 4 and 8 search directions, respectively, while Fig. 4(c) illustrates the path obtained through the method proposed in this paper. Assuming a grid with a side length of 1, the optimal path lengths discovered by the ants using different search methods can be calculated and presented in Table 1. It is evident from Table 1 that the search method proposed in this paper can identify the shortest feasible path, which is highlighted in bold.
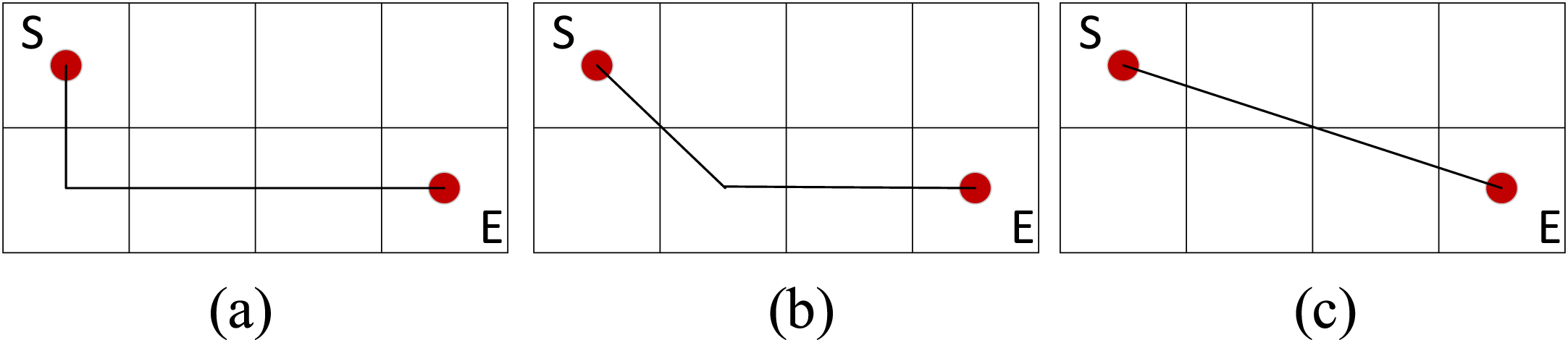
The paths planned by ants using different search methods ((a) path of 4 search directions; (b) path of 8 search directions; (c) path of 32 search directions).
Results of different search methods
The heuristic function of traditional ACO solely considers the distance between adjacent grids, without accounting for the distance to the end point. Consequently, it fails to effectively guide ants towards exploring the end point, resulting in limited global search capability and a propensity to converge to local optima. To address these shortcomings, an area heuristic function that incorporates both local and global search is proposed.
To describe the improved method, two distinct scenarios are discussed below: The area of the formed triangle is non-zero
As depicted in Fig. 5, S represents the start point, E represents the end point, i represents the current node, j1, j2 and j3 represent the available points. It is evident that s
ij
2
E
< s
ij
3
E
< s
ij
1
E
, indicating that that smaller triangle signifying is closer to the end point. Consequently, the probability of selecting point, j2 in Fig. 5 is higher. Schematic diagram of the area heuristic function. The area of the formed triangle is zero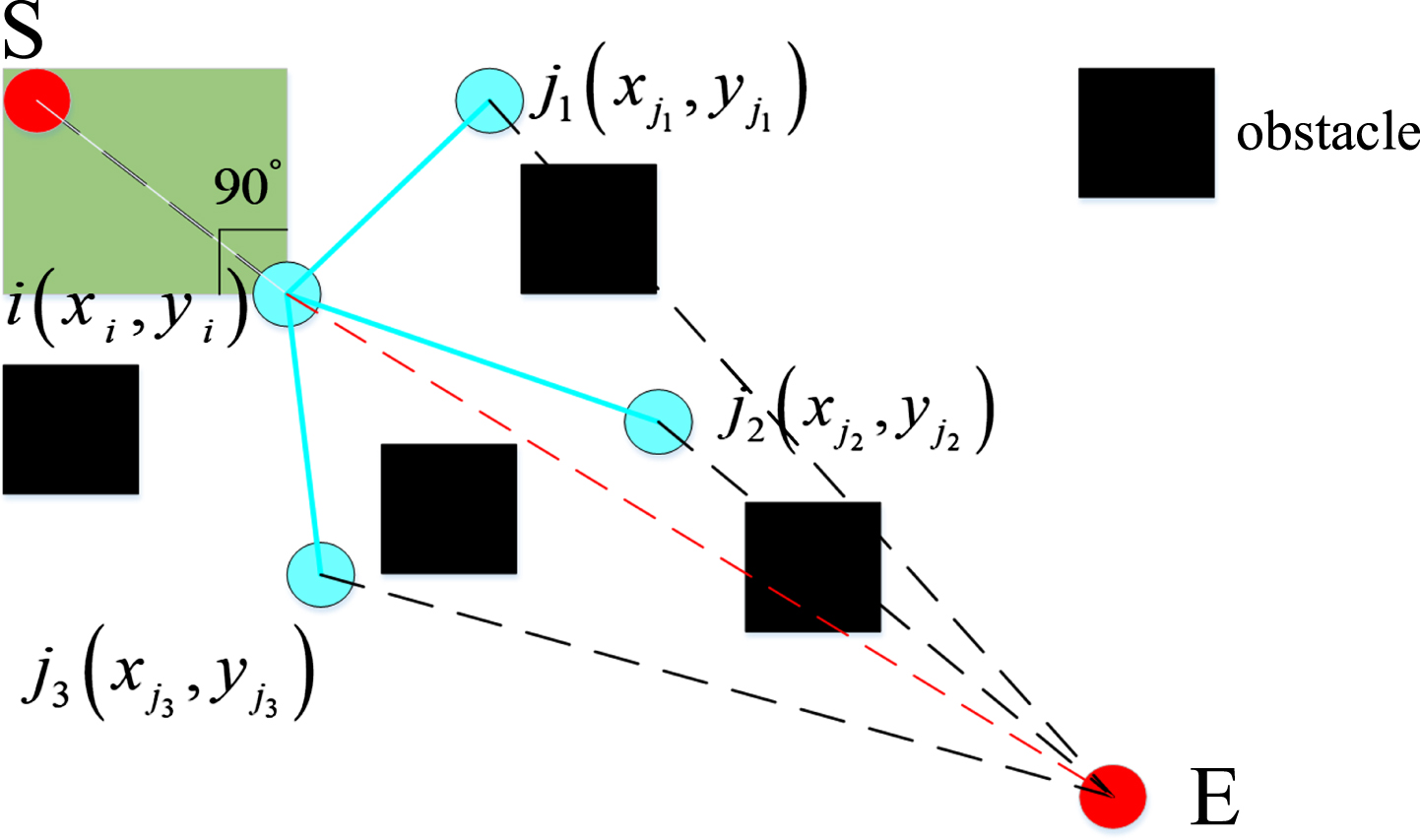
In this scenario, there is a special case where three points are collinear,i.e., the area of the triangle is equal to zero, shown as Fig. 6.
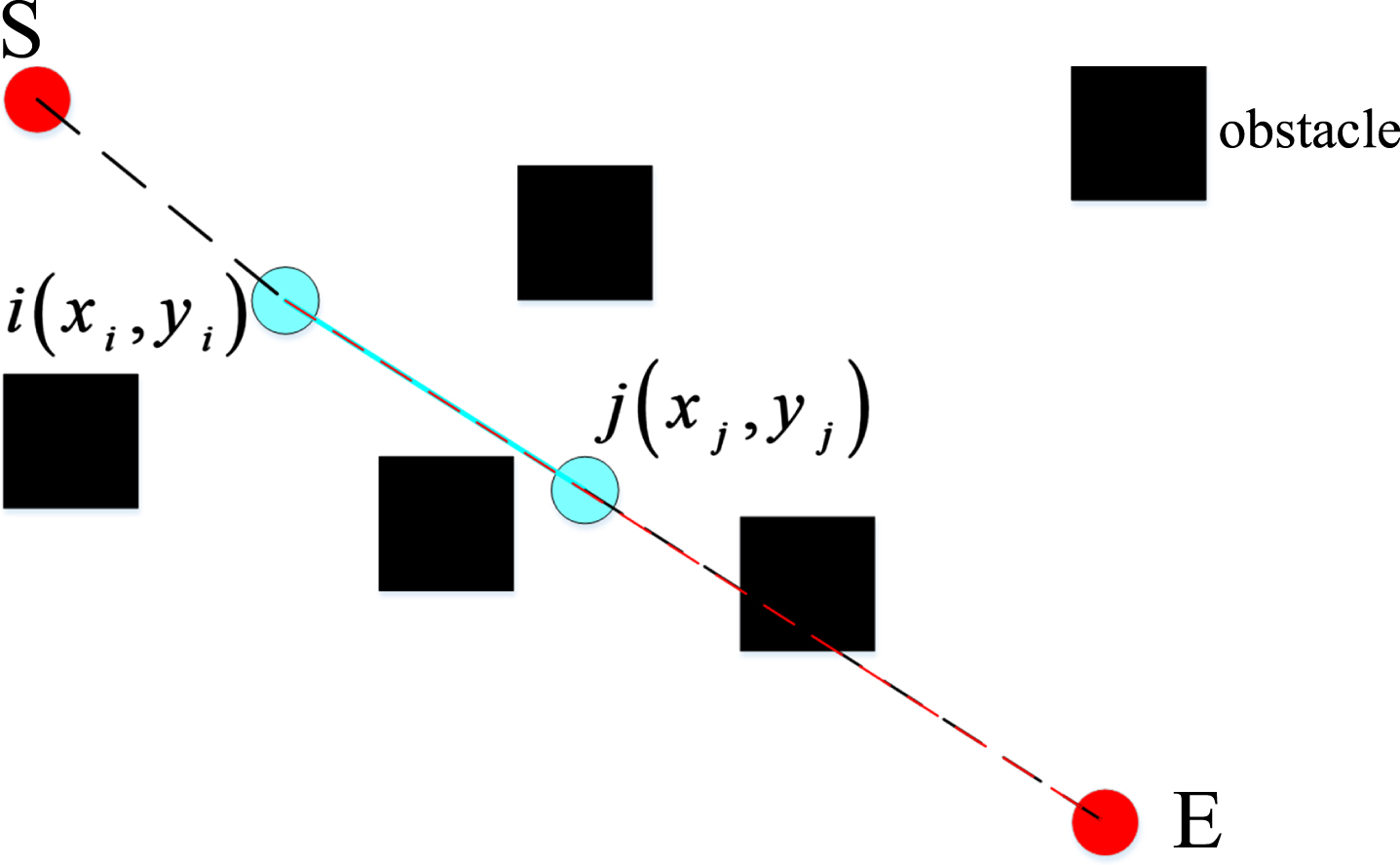
Special scenario.
Equation (11) is utilized to describe the situation depicted in Figs. 5 and 6:
Different angle coefficients are assigned to various ranges of ant advancement. The underlying concept is to assign larger angle coefficients to ants moving towards the end point compared to ants moving towards the starting point, this ensures the ants are motivated appropriately. The specific values of ω1 and ω2 are determined based on experimental observations and analysis.
The improved heuristic function improves the effectiveness of the algorithm’s search path, thereby reducing the likelihood of getting trapped in local minima.
Based on the existing drawbacks of ACO pheromone update mechanism, the paper presents an improved update strategy that incorporates both local and global pheromone updates. The approach aims to strike a balance between exploration and exploitation in the algorithm. The improved pheromone update function is represented by Equation (15).
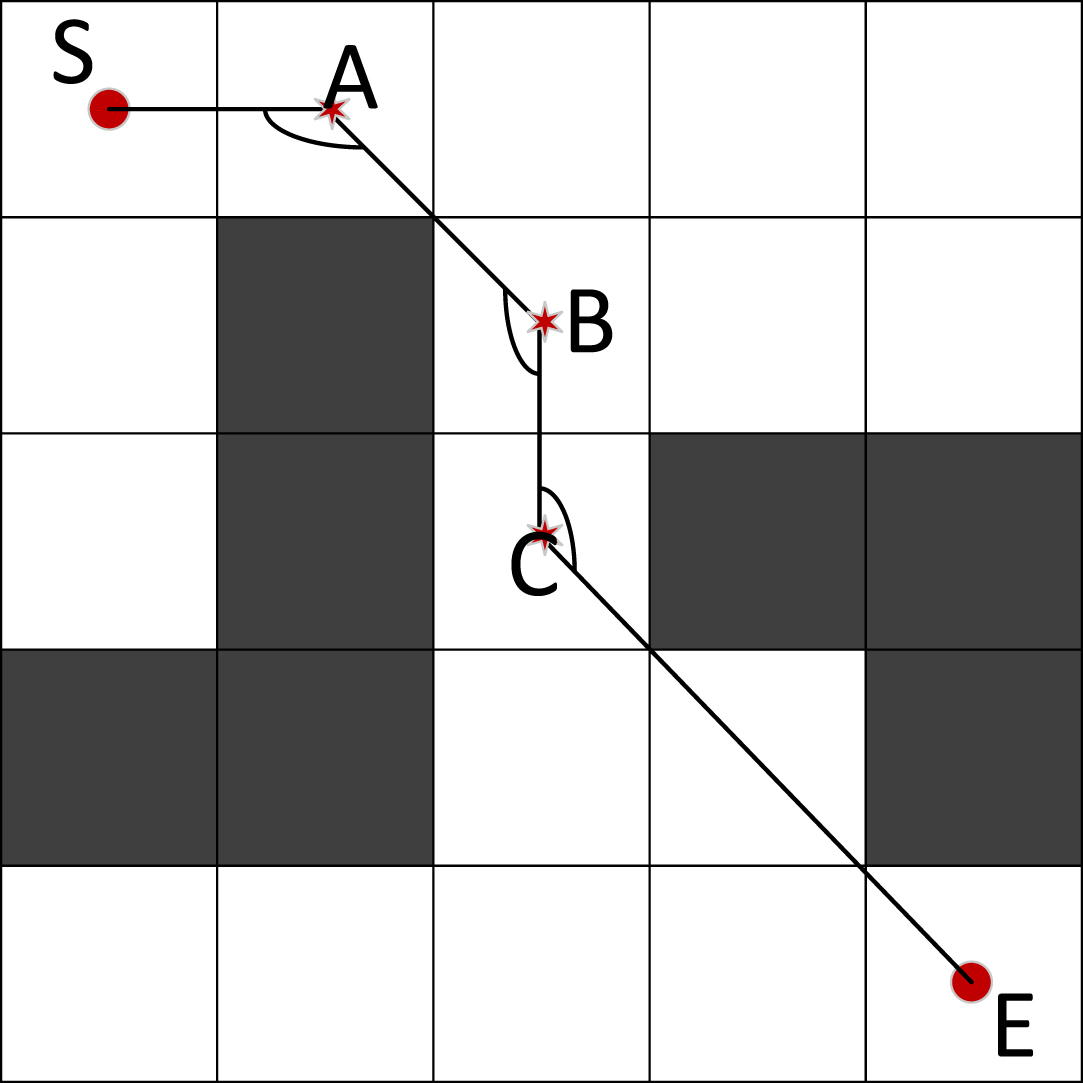
In this paper, the selection of optimal path is determined by considering not only high pheromone concentration and collisions avoidance but also minimizing of turns and the angles of the turns. By taking all these factors into account, it increases the likelihood of finding the most optimal path.
Taking Fig. 7 as an example, S represents the start point and E represents the end point. In this case, the total path turning angle is ∠A + ∠ B + ∠ C, and there are 3 turning points is 3. It is worth noting that a smoother and shorter path is more likely to be chosen as the optimal path when both the total turning angle and the number of turning points are smaller.
Path turning angle diagram.
Based on the aforementioned analysis, Equation (16) is proposed to enhance the local exploration capability by updating the local pheromone update mechanism. This equation pertains specifically to the movement of the m-th ant moves from node i to node j.
While for global pheromone update, the aim is to enhance the global exploitation ability. To achieve this, the current minimum path length and the minimum path length of the global optimal path are taken into considered. Additionally, a reward and penalty mechanism is employed in the global pheromone update. The specific relationship between factors is described in Equation (17).
In traditional ACO, the pheromone volatility factor is typically a constant is a constant. However, this can lead to the algorithm easily getting stuck in local optimum, making it challenging to converge to the global optimal solution. Moreover, the constant volatility factor hinders the algorithm from discovering the global optimal path efficiently, resulting in increased time and resource consumption. In this paper, an adaptive update strategy for the pheromone volatile factor is proposed and its update formula is listed as follows:
Obviously, K is a crucial parameter for updating ρ. To determine the most appropriate value, various attempts are made. Figure 8 illustrates the curve of the pheromone volatility changes as K ranges from 0 to 100. It is worth noting that the initial volatility factor ρ0 is set to 0.4.

Trend of pheromone volatility factor.
As depicted in Fig. 8, the behavior of pheromone volatility factor can be observed. When the number of iterations is small, coefficient remains low, allowing ant to retain more pheromones on the paths they traverse. As the number of iterations increases, the volatility coefficient rises, causing the pheromone on each path evaporates rapidly, which helps prevent the algorithm from getting stuck in local optima. Eventually, the pheromone volatility coefficient gradually decreases, leading to an increase in pheromone content on the paths. This enhanced concentration of pheromones has stronger guiding effect on the ant colony. Once the number of iterations reaches a certain threshold, the ant colony will converge to the path with higher pheromone content, making the increasing pheromone concentration on the path favorable to the convergence of the algorithm.
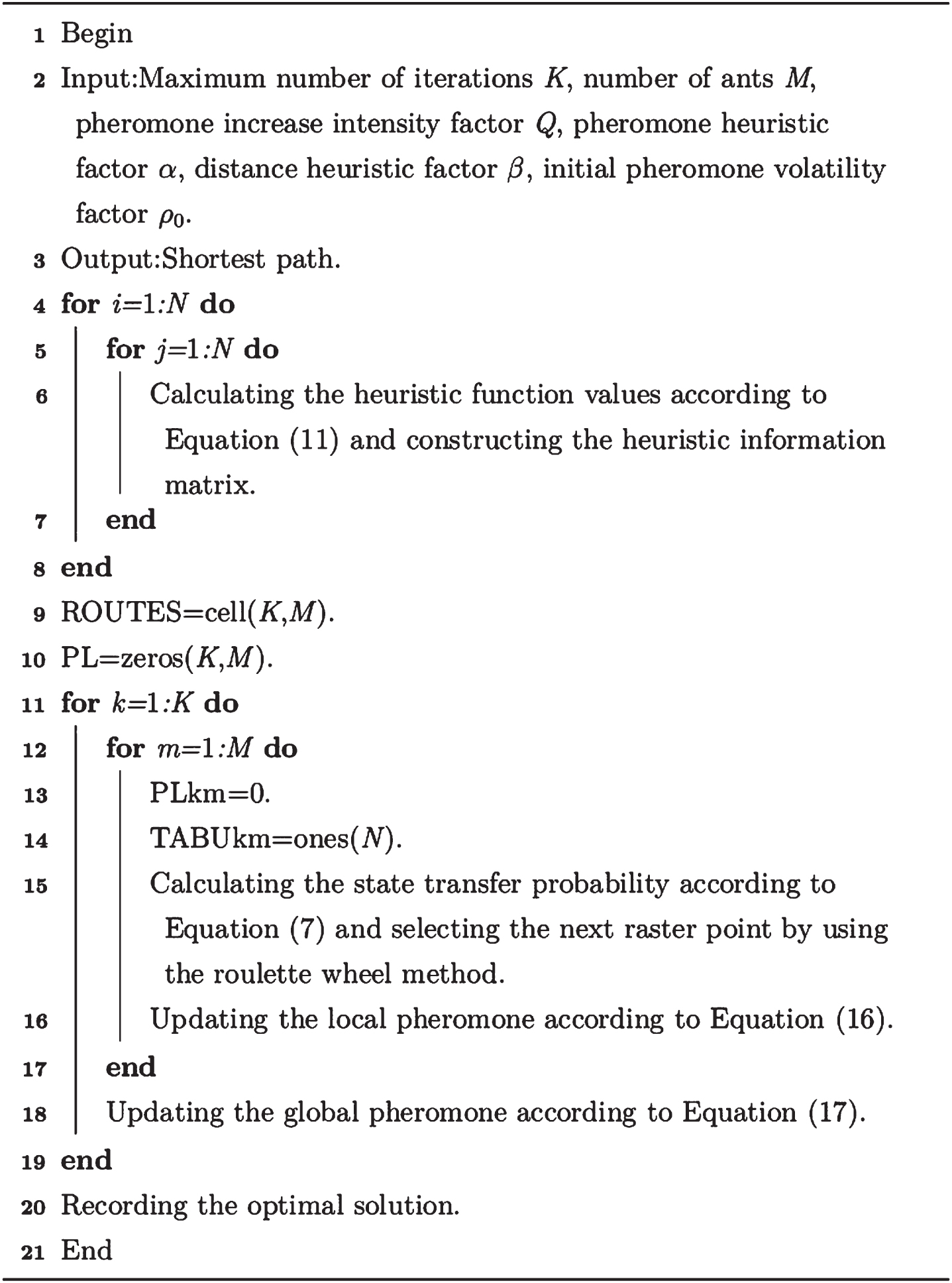
The flowchart of the improved ACO algorithm is shown in Fig. 9, and the pseudocode of the algorithm steps is listed as Algorithm 1 shown.
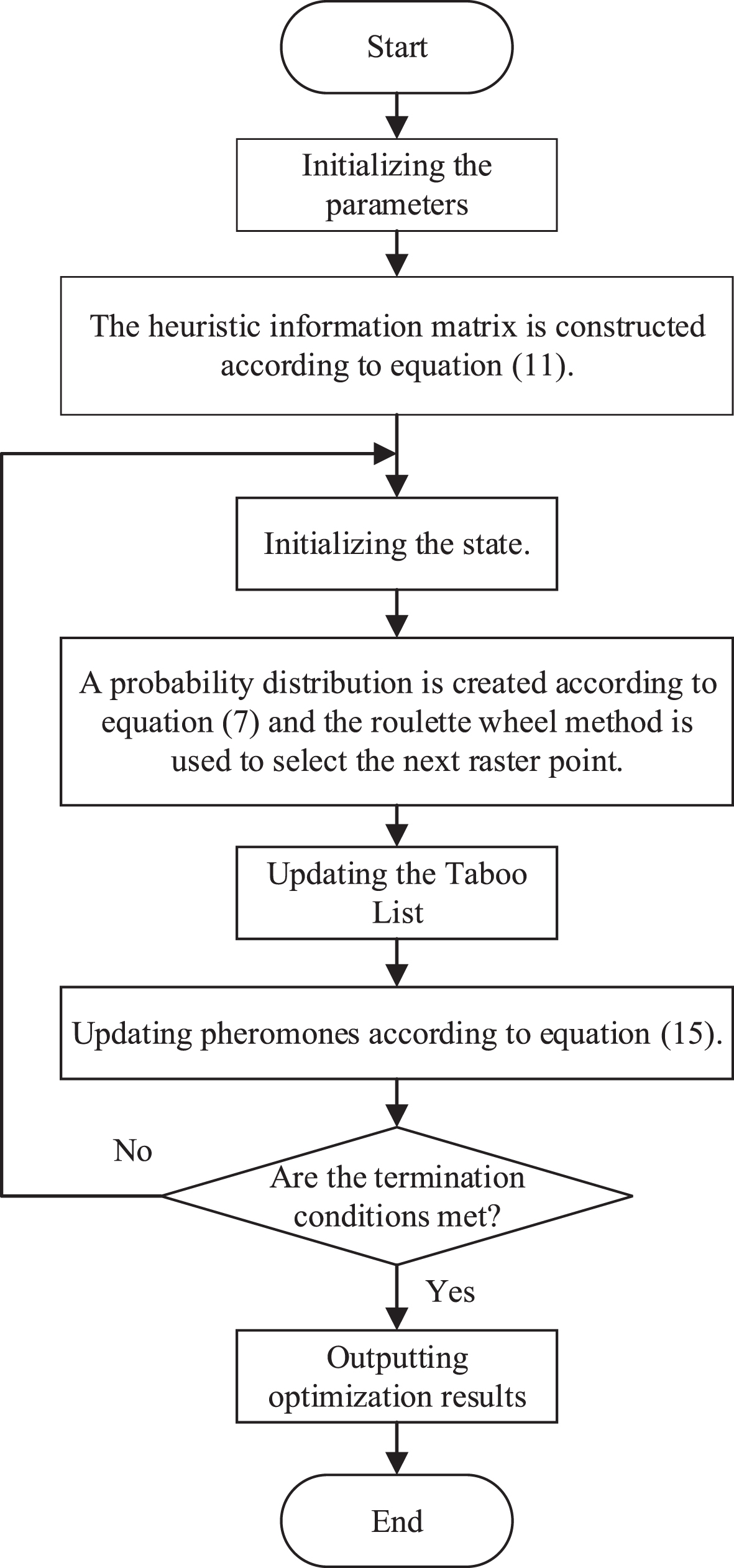
Flow of the proposed algorithm.
All simulation experiments are conducted within a 2D environment. The obstacles within this environment are static and randomly generated. Specially, grid map environments below 50×50 are considered general scenes, while grid environments with dimensions of 50×50 or larger are considered more complex scenes.
Parameter setting
To verify the proposed method, this section presents several scenarios where the proposed method is compared with different existing methods. All the methods were implemented and executed using Matlab2022b, with the parameters set the same as specified in Table 2. The simulation environment utilized for these experiments was: Windows 11 (64-bit), AMD Ryzen 5 5500U with 2.10 GHz, 16 GB.
Algorithm parameter settings
Algorithm parameter settings
To determine the optimal values of ɛ and λ, parametric experiments were conducted using the scenario depicted in Fig. 12(b). The range for each parameter was set as follows: ɛ ∈ [0, 2] λ ∈ [- 1, 1]. In each experiment, only one parameter was changed, while keep the other parameters fixed. To minimize the impact of algorithm randomness, the average value of the results from 10 independent runs was used for comparison and analysis.
The experimental results for each group of parameter ɛ combinations are shown in Table 3. The minimum values in the experimental data are highlighted in bold. Based on the results in Table 3, it can be observed that in Groups 1, 2, and 3 (corresponding to ɛ1 > ɛ2 > ɛ3 > ɛ3), the algorithm yields better results. On the other hand, in Groups 4, 5, and 6 (corresponding to ɛ1 ≤ ɛ2 ≤ ɛ3 ≤ ɛ4), the algorithm performs worse or fail to find effective paths. These findings align with the theoretical results discussed in Section 4.3. Consequently, a set of parameters from the first three groups of experiments is selected, with the parameters from Group 3 being chosen as the default value of ɛ for the subsequent experiments.
Results for different values of parameter ɛ
The experimental results for each group of parameter λ combinations are presented in Table 4. From the results in Table 4, it can be seen that the first three groups of cases with λ1 > λ2 > λ3 > λ4 yields better results in both Group 2 and 3 experiments. On the other hand, in the last three groups of cases with λ1 ≤ λ2 ≤ λ3 ≤ λ4, only Group 6 managed to find a valid path. Based on these findings, the parameter value from group 3 is chosen as the default value of the parameter λ for subsequent experiments.
Results for different values of parameter λ
According to the analysis above, for IACO-32, the optimized values of the and parameters are set as ɛ = { ɛ1 = 1.2, ɛ2 = 1.0, ɛ3 = 0.8, ɛ4 = 0.5 } , λ ={ λ1 = 0.5, λ2 = 0, λ3 = -0.3, λ4 = -0.4 }, respectively.
The paper proposed four improvement strategies in order to validate their effectiveness. Based on the traditional ACO, only one strategy in this paper is utilized in this paper, while the remaining strategies are kept unchanged. As a result, four experiments will be conducted, comparing each strategy with IACO-32 to determine their impact on the improvement of the three indicators in IACO-32. To ensure fairness, all simulations will run in a 20×20 grid map environment, and the final solution will be determined by the average results of 10 runs. The parameter settings are provided in Table 5, where Strategy I represents the search pattern strategy, Strategy II represents the heuristic function strategy, Strategy III represents the pheromone updating mechanism strategy, and Strategy IV represents the pheromone fluctuation factor adaptive updating strategy.
Parameter table of the four strategies
Parameter table of the four strategies
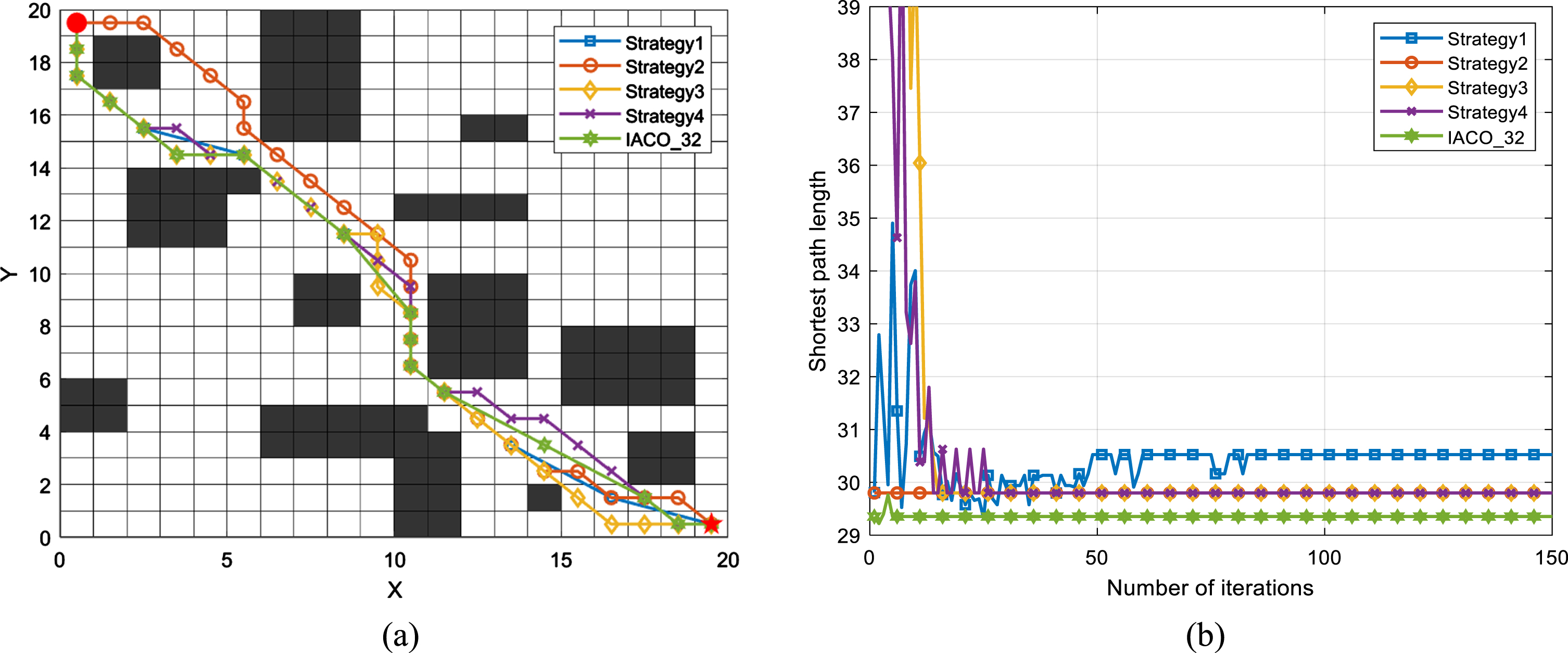
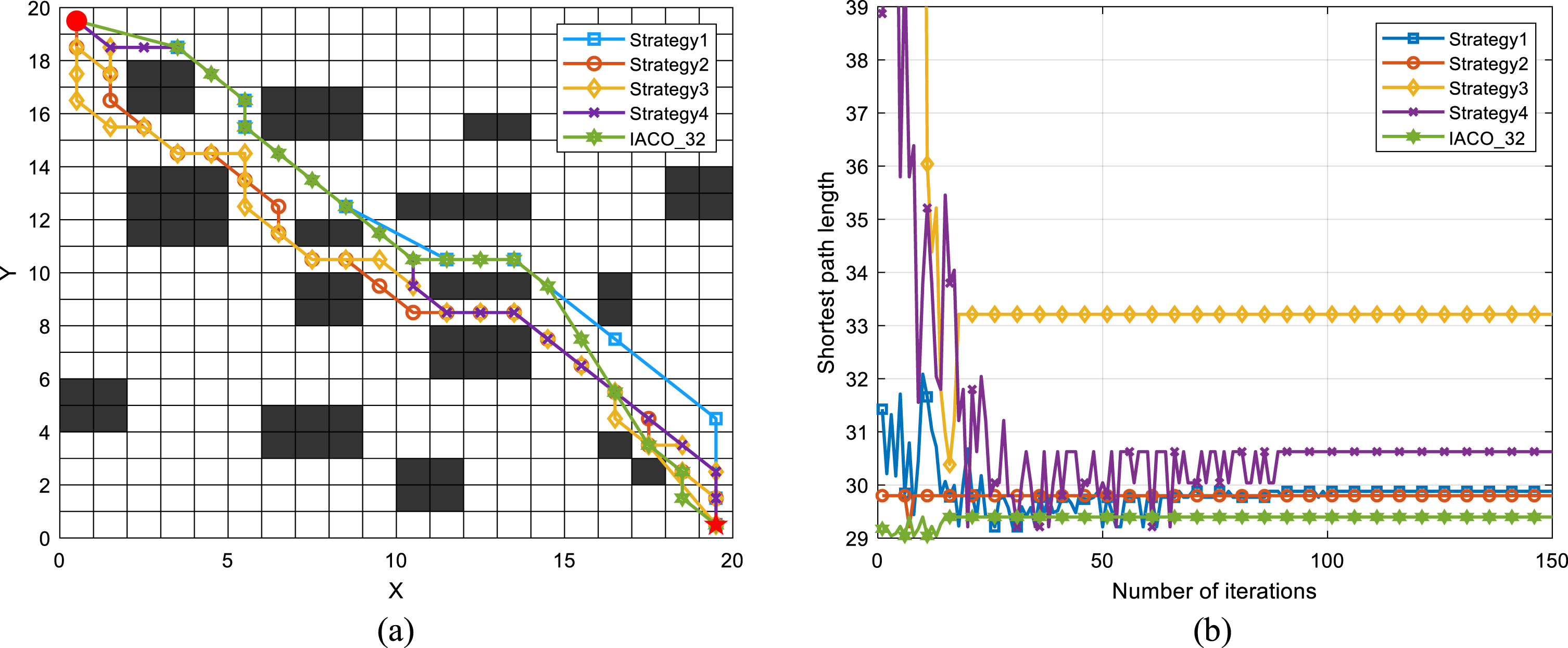
The optimal path diagrams obtained in two different map scenarios using the four proposed strategies and IACO-32 in this paper are depicted in Figs. 10 (a) and 11(a). It is evident from the figures that the optimal paths can be efficiently planned using both the four strategies and IACO-32. The iterative convergence curves are illustrated in Figs. 10 (b) and 11(b), wherein the horizontal axis represents the number of iterations and the vertical axis represents the shortest path length for each iteration.
Results of Map 1 runs ((a) Optimal path diagram of the four strategies; (b) Iterative convergence graph).
Results of Map 2 runs ((a) Optimal path diagram of the four strategies; (b) Iterative convergence graph).
Table 6 lists the average experimental data obtained from 10 simulation runs for each of the four strategies and IACO-32 in Maps 1 and 2. Based on the data, the following conclusions can be drawn, where “+” indicates larger data than IACO-32, “-” indicates smaller data than IACO-32, and “∼” indicates similar data.
Experimental data of the four strategy simulations
In map 1, the path length metric L (p) of Strategy I is similar to IACO-32 and the smoothness metric S (p) is smaller than IACO-32. Meanwhile, the path length metric L (p) of Strategy II is similar to IACO-32 and the convergence performance metric C (p) is smaller than IACO-32. As for Strategy III, the convergence performance metric C (p) is similar to IACO-32; and the path length metric L (p) of Strategy IV is similar to IACO-32.
In map 2, the path length metric L (p) of Strategy I is similar to IACO-32, while the smoothness metric S (p) is smaller than IACO-32. Similarly, the path length metric L (p) of Strategy II is similar to IACO-32, while the convergence performance metric C (p) is smaller than IACO-32. For Strategy III, the convergence performance metric C (p) is similar to IACO-32; and the path length metric L (p) of Strategy IV is similar to IACO-32.
Overall, Strategy I, Strategy II and Strategy IV are effective in terms of the path length metric L (p); Strategy II and Strategy III are effective in terms of the convergence performance metric C (p); while Strategy I is effective in terms of the smoothness metric S (p). Based on these findings, it can be concluded that all four strategies are effective in different aspects.
To evaluate the path search ability of the search method and heuristic information calculation method proposed, scenarios of different sizes (10×10, 20×20 and 30×30) are tested. The detailed environments for these scenarios are illustrated in Fig. 12. Additionally, two comparison algorithms are employed, and the parameters for all three algorithms are listed in Table 2.
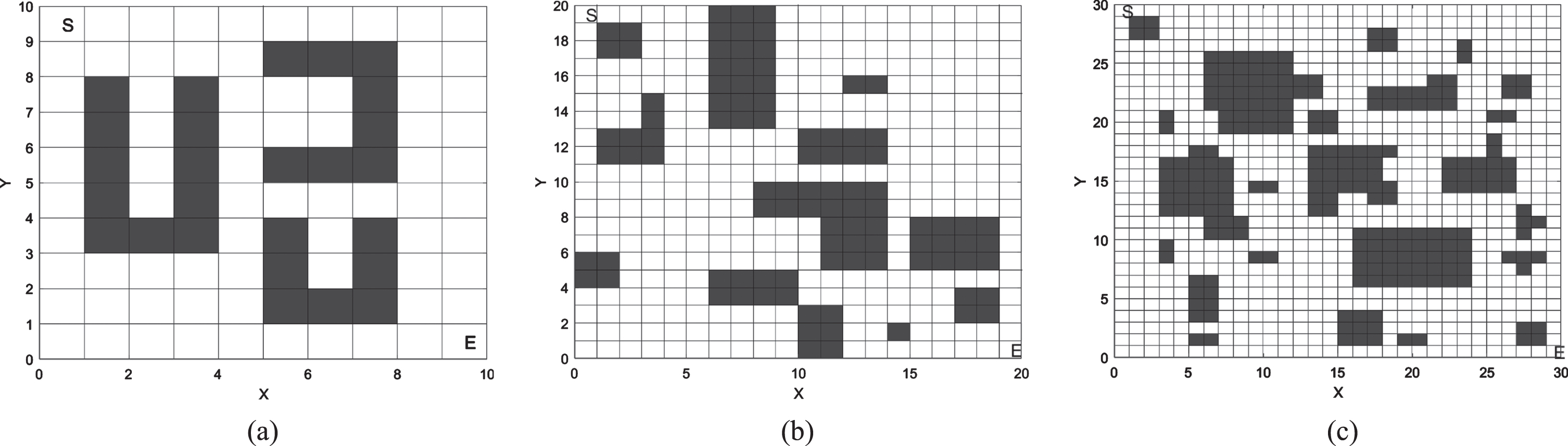
Three map environments ((a) 10×10 map; (b) 20×20 map; (c) 30×30 map).
Each algorithm is run 10 times, and their performance is compared based on average path length, average number of convergence iterations, average running time, number of turning points and turning angle. The number of convergence iterations and running time reflect the convergence speed of the algorithm, and the number of turning points and turning angle reflect the smoothness of the path. The statistical results of these metrics can be found in Tables 7–9. Furthermore, the optimal paths for different scenarios are listed in Fig. 13.
Simulation results in 10 × 10 raster map
Simulation results in 20×20 raster map
Simulation results in 30×30 raster map
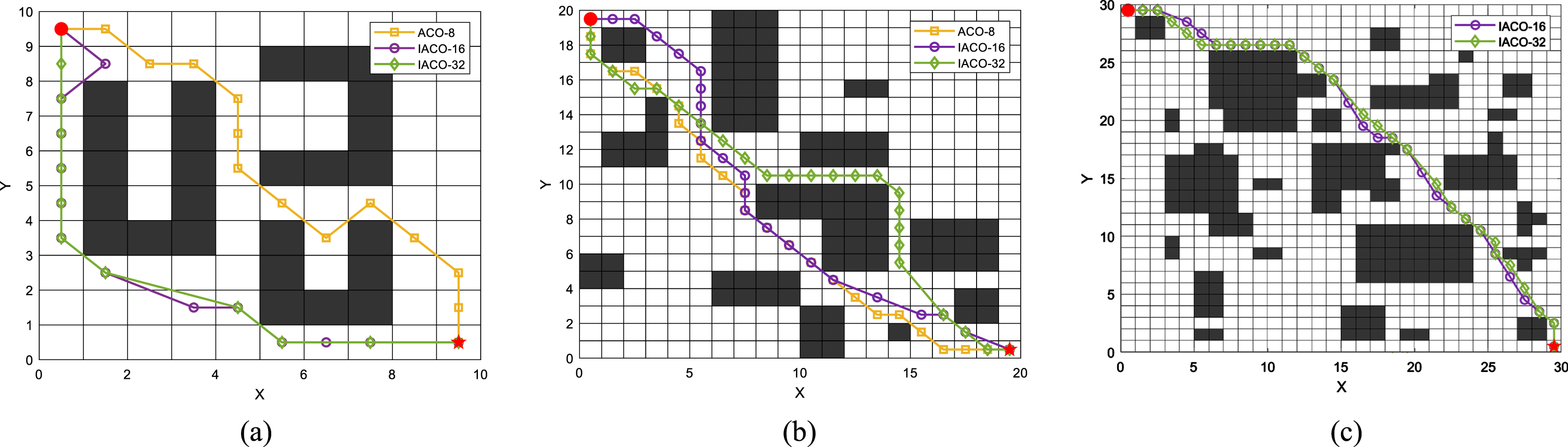
Optimal paths of the three algorithms in different grid map environments ((a) 10×10 map; (b) 20×20 map; (c) 30×30 map).
In the scenario depicted in Fig. 13(a), the data presented in Table 7 highlights the notable advantages of IACO-32 over the other two ACO algorithms. Specially, the path length metrics of IACO-32 demonstrate a reduction of 25.97% and 21.47% compared to the other algorithms. Additionally, the convergence performance metrics C (p) shows a reduced of 87.46% and 57.45%, while the smoothing metrics S (p) demonstrate a reduced by 24.09% and 22.67%, respectively. These results clearly indicate that the proposed method outperforms the two compared algorithms in this particular environment.
For the scenario shown in Fig. 13(b), an examination of Table 8 reveals that the path length metrics L (p) of IACO-32 exhibit minimal changes when compared to the other two ACO algorithms. However, a significant improvement is observed in the convergence performance metrics C (p), with reductions of 93.07% and 9.44%, respectively. Similarly, the smoothing metrics S (p) demonstrate a reduction of 17.41% and 11.48% for the proposed method. Consequently, it can be concluded that in this particular environment, the proposed method surpassed the two compared algorithms in terms of convergence performance and smoothness.
Upon analyzing Table 9 and considering the 30×30 map, it becomes evident that the path length metrics L (p) showcase a reduction of 3.34% in comparison of the IACO-16 algorithm. Additionally, the convergence performance metrics C (p) present a reduction of 42.50%, while the smoothing metrics S (p) exhibit a reduction of 8.55%. Consequently, it can be concluded that in this specific environment, the traditional ACO-8 algorithm fails to generate an effective path. On the other hand, the proposed method outperforms the IACO-16 algorithm in all three performance metrics.
Based on the statistical results, it is evident that ACO-8 exhibits the poorest search performance in terms of path finding effectiveness. Particularly, when the grid map reaches a certain scale, ACO-8 fails to discover an effective path. Conversely, IACO-32 demonstrates significant advantage in terms of path length, running time and path smooth, establishing its superiority in path finding.
By observing Fig. 13, it becomes apparent that ACO-8 yields the shortest path. However, it is notable that this path contains several inflection points and lack smoothness. Conversely, the path generated by IACO-16 [46] exhibits fewer redundant points compared to ACO-8, yet it is not the shortest path. On the other hand, the path planned by the IACO-32 algorithm displays fewer redundant points and achieves a higher level of smoothness.
To further validate the efficacy of the proposed algorithm in this paper, a comparison is conducted with four distinct types of algorithms: Genetic Algorithm (GA), Particle Swarm Optimization (PSO), Sticky Mushroom Algorithm (SMA), and Sparrow Search Algorithm (SSA). This evaluation takes place within the confines of 20×20 maps, employing a population size of 50 and an iteration number of 50.
Figure 14 illustrates the optimal paths obtained by the five algorithms, and Fig. 15 displays their convergence curves. Upon analyzing these figures several observations can be made. Firstly, the path generated by GA and PSO planning in Fig. 14 exhibit noticeable redundant points. Secondly, the paths produced by SMA and SSA planning appear similar, showing no evident redundant points, but with right-angle turns the lack smoothness. In contrast, the path planned by IACO-32 display no obvious redundant points and demonstrate a high level of smoothness.

Path diagram of simulation run results ((a) Results of GA; (b) Results of PSO; (c) Results of SMA; (d) Results of SSA; (e) Results of IACO-32).
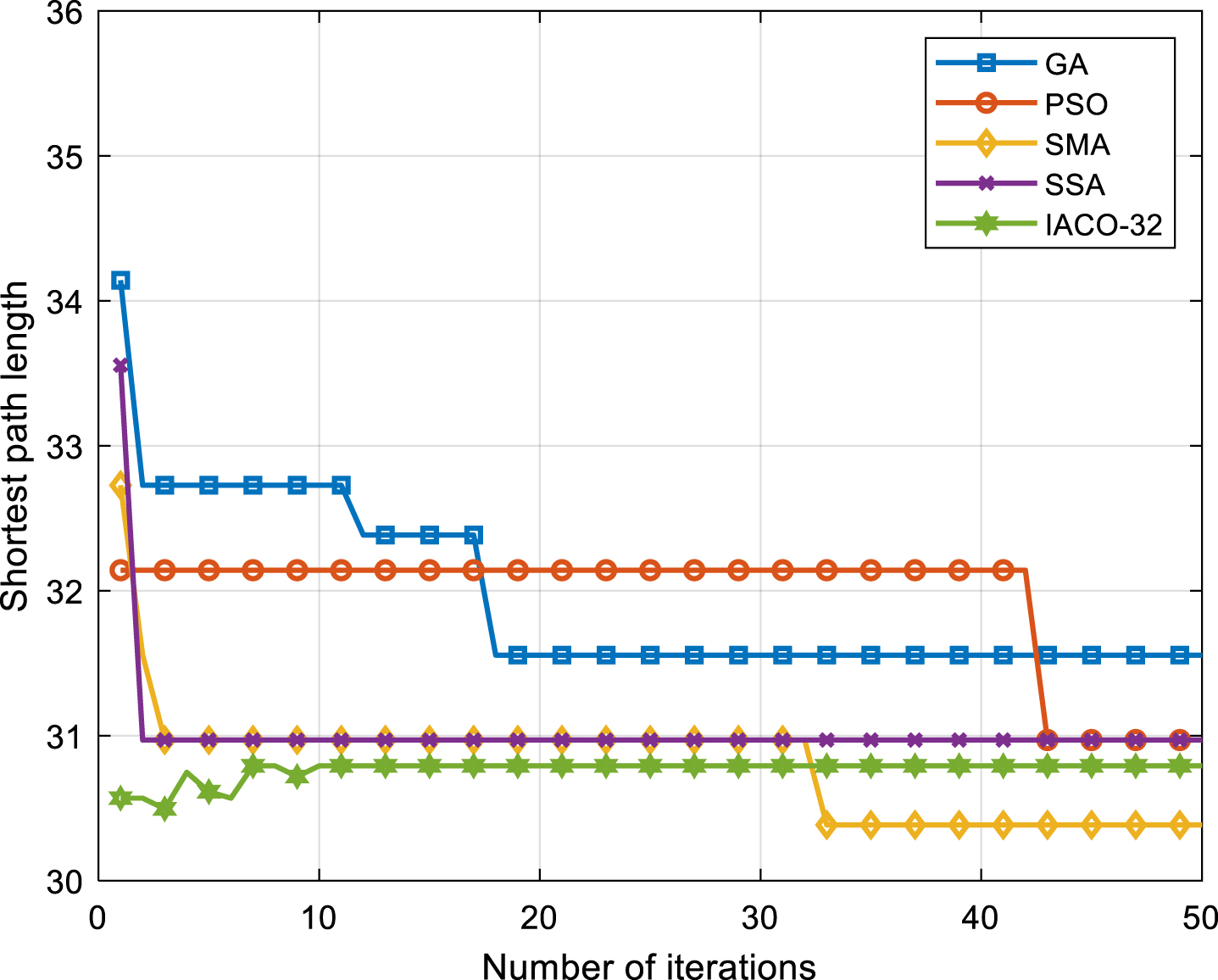
Convergence graph of five algorithms.
Figure 15 reveals that GA and PSO perform relatively worse than IACO-32 in terms of path length and number of convergences. While SMA achieves a slightly shorter path length than IACO-32, it experiences a significantly higher number of convergences. On the other hand, SSA exhibits a slightly smaller number of convergences smaller than IACO-32’s, but its path length is not as short as IACO-32.
Table 10 provides detailed results, indicating that the paths planned by the IACO-32 algorithm proposed in this paper are shorter than GA, PSO and SSA in terms of path length. Furthermore, the IACO-32 algorithm achieves fewer iterative convergence compared to GA, PSO and SMA. Additionally, the number of path inflection points gained by IACO-32 is fewer than GA’s.
Comparison results of five algorithms
In summary, the main advantage of IACO-32 algorithm lies in its minimal fluctuation in the convergence curve and its ability to quickly approach the optimal path value during the pre-iteration phase. Conversely, the other four algorithms exhibit significantly longer path lengths during the pre-iteration phase and require gradual iterations to gradually reduce the path length. This phenomenon is observed even in the latest proposed SSA algorithm. While the SSA algorithm surpassed the IACO-32 algorithm in terms of the number of iterations, it compromised on two important indicators: path length and the volatility of the convergence curve.
To verify the effectiveness of IACO-32 in larger and more complex scenarios, we conducted experiments in a 50×50 environment size. We compared the performance of the traditional ACO algorithm with the IACO-32 algorithm on two different map environments. In order to ensure the reliability of the algorithm in these complex scenarios, the maximum number of iterations of the algorithm is set to 150 in the scenario depicted in Fig. 16, and 100 in the scenarios in Fig. 17, respectively, β = 7, and other parameters remained consistent with the settings mentioned earlier.
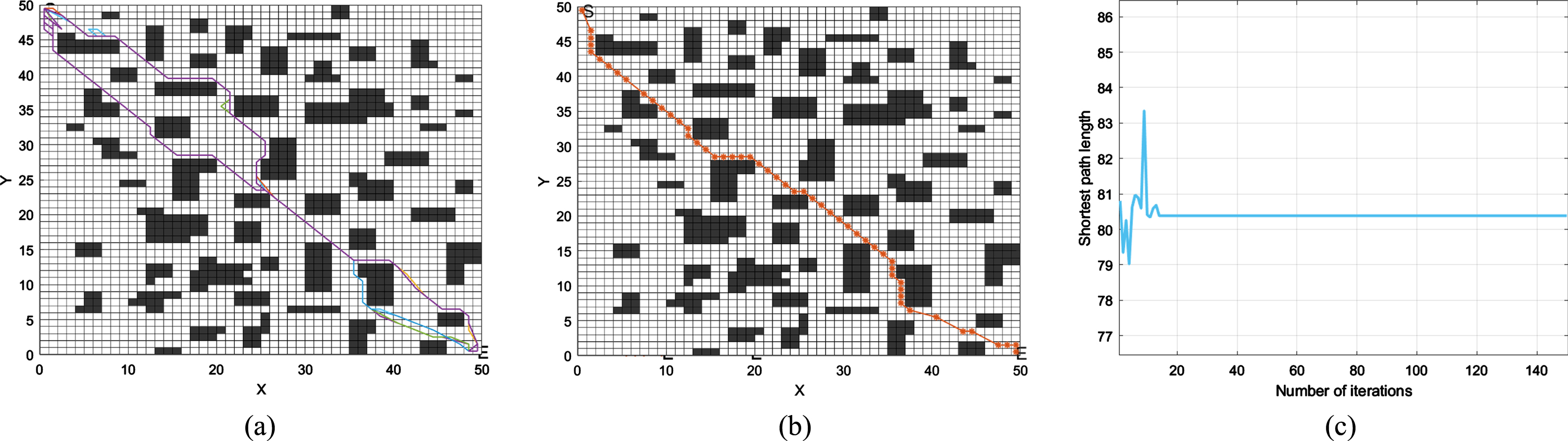
Results the first complex scenario ((a) Search path diagram;(b) Optimal path;(c) Iterative convergence curve).
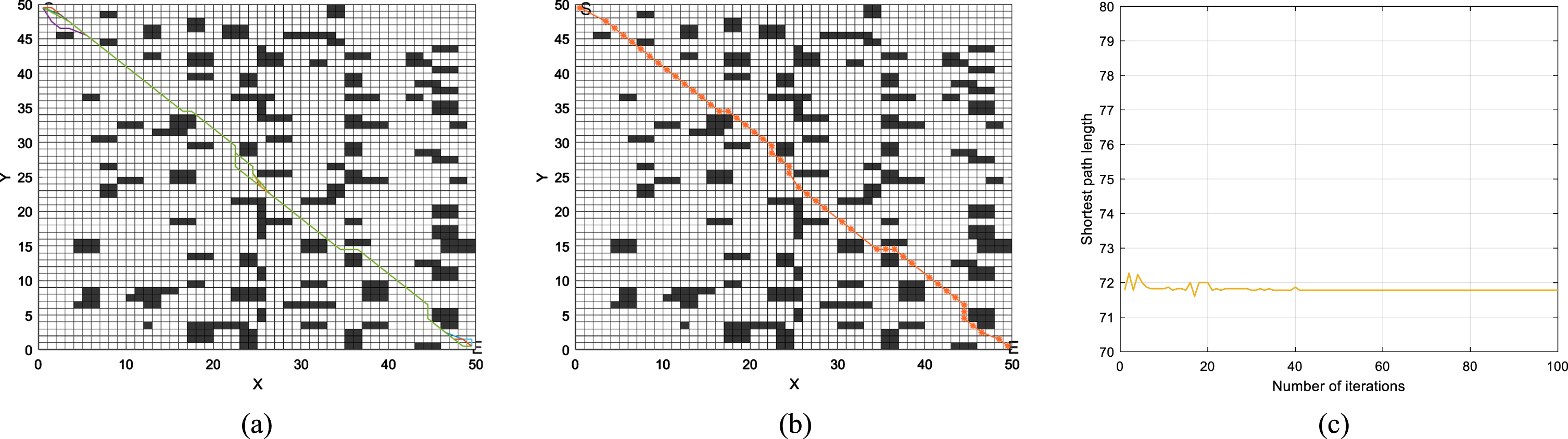
Results the second complex scenario ((a) Search path diagram;(b) Optimal path;(c) Iterative convergence curve).
In the two different scenarios, the optimal paths obtained by IACO-32 algorithm are illustrated in Figs. 16 (b) and 17(b), respectively. The corresponding search trajectories are presented in Figs. 16 (a) and 17(a). These figures demonstrate that the IACO-32 algorithm effectively finds optimal paths in complex maps.
The convergence curves, depicting the path length changing over iterations, are shown in Figs. 16 (c) and 17(c). The horizontal axis represents the iteration number, while the vertical axis represents the path length. It is evident that the algorithm proposed in this paper gradually converges within the set maximum number of iterations. In contrast, the traditional ACO algorithm fails to converge within the given maximum number of iterations, thus unable to search for an effective path.
Table 11 provides a data table of the simulation results, and the standard deviation indicates that the convergence performance of the algorithm proposed in this paper is more stable and less volatile.
Operational results data table
Overall, the results confirm the effectiveness and stability of the IACO-32 algorithm in larger and more complex scenarios. It successfully obtains optimal paths while ensuring convergence within the specified number of iterations.
In this paper, we address the low search efficiency and slow convergence issues associated with traditional ACO algorithms. To overcome these challenges, we proposed an improved ACO algorithm with 32 search directions, referred to as IACO-32. The IACO-32 introduces enhancements in heuristic function, pheromone update mechanism and pheromone volatility factor. These improvements enable the algorithm to expand the search range of the ant colony and significantly improve convergence speed. Simulation results demonstrate that IACO-32 algorithm possessed superior search capabilities compared to traditional ACO algorithms. It not only generates smoother planner path but also reduces energy loss of the robot. The effectiveness and superiority of the proposed algorithm are further verified through experiments conducted in both simple and complex simulation environments. The results confirm the feasibility and effectiveness of the IACO-32 algorithm in addressing the limitations of traditional ACO algorithm.
What needs illustration is that the robots working environment in this study is assumed to be static, however, in many real-world practical applications, the environment is often more complex, including semi-static outdoor scenes and dynamic environments. This complexity posed additional challenges for effective path planning algorithms. In light of these challenges, our further work will be dedicated to further improving the performance of existing algorithms. One approach we will explore is integrating the advantage of multiple algorithms to optimize their overall performance. By combining the strengths of different algorithms, we aim to develop more robust and efficient path planning approaches. Additionally, we recognize the needs to address dynamic obstacle avoidance in complex multidimensional environments, this is a crucial aspect that requires consideration in real-world scenarios.
Acknowledgements
This work was supported by the Natural Science Research of Jiangsu Higher Education Institutions of China (22KJA580003) and Xuzhou Science and Technology Project of China KC23008).