
Abstract
Floorplanning is the central part of the physical design of “Very Large Scale Integrated (VLSI)” circuit design. It decides the core performance characteristics of the fabricated chip. It is possible to model the floorplanning issue as a multi-objective problem, where a number of objectives satisfied simultaneously. Based on the complexity point of view, it is an NP-hard problem, which means getting an optimal solution is a challenging task. In order to resolve this problem, in this paper, an adversity-based multi-cultureself-adaptive form of Particle Swarm Optimization (PSO) has proposed. Multi-objective optimization approach has applied to minimize the layout area required to place all modules and their total interconnection wire length. The proposed solution has multicultural integration, which provides the ability to explore the solution space faster and efficiently. Diversity-based self-adaptation of parameters provides the optimum balance among the exploration as well as exploitation. Finally, the experimental results showed the advantages in comparison to other variations of PSO in delivering the compact and robust performances.
Keywords
Introduction
Among various stages of chip design, physical design is one of the most critical and challenging areas. Performances obtained in physical design are having a direct effect on final chip performances. In this regard, automation for the physical design of integrated circuits remains an active area of research in terms of the development of efficient algorithms. The technological development in fabrication ability makes possible to integrate more and more devices on our silicon chips forced the automation algorithms to scale up continuously. This number will keep increasing for the future technology generations. Hence, there is a demand to place a number of transistors automatically on a chip which has to occupy a minimum area along with a minimum length of connected wires. There is a rapid improvement has observed in the electronic industry and technology, and efficient chip design has been one of the most attention areas of research. Moreover, the improvement in various dimensions of VLSI design has given possibilities to develop the chip with high composite, reliable, miniature, as well as higher performance. The complexity of design keeps increasing because of an innumerable number of transistors on one chip.
VLSI floorplanning is important in chip design and has obtained a special attention by researchers. In simple word, the process of the floorplanning can be considered as the structure identification that should be placed close together and allocating space with satisfying the several constraints with desires to keep the things closer. On the basis of the area of the hierarchy and the design, an appropriate floorplan is decided upon. The Floorplanning process obtains care of various types of the modules like the macros exploited in the memory, design, other IP cores and their placement requirements, the available potential routing as well as involved area of the complete design. Apart from that structure of IO, the aspect ratio of the design is also considered in floorplanning process. If the quality of the floorplan is bad, there is wastage of die area and congestion in the routing. In a number of design methodologies, performance parameters Speed and Area are prime important things, which could be considered for traded off against each other because of inadequate routing resources, as well as the more routing resources cause, the slower the design. Minimizing the area gives freedom to the design to employ lesser resources, as well as to ensure the sections of the design will close. This generates the shorter length of interconnect, less number of required routing resources, high-speed end-to-end signal paths, along with faster and more consistent place and route times.
The prime aim of floorplanning is to optimize the cost function (such as floorplan area, total interconnection wire lengths, etc.) to reduce the chip cost, occupied area by chip and performance improvement. Floorplanning is a significant phase in VLSI design, and its complexity comes as an NP-hard combinatorial optimization problem where the domain of the solution space gets an exponential increase of circuits scale, and therefore it is not easy to achieve the best solution. Hence, heuristic methods can be the better solution approach to exploring the global solution space. Rectangular dissection usually represents a floorplan. The border of a floorplan is usually a rectangle since this is the most convenient shape for chip fabrication. The rectangle is dissected with several straight lines which mark the borders of the modules. The lines are usually restricted to horizontal and vertical lines only often; modules are restricted to rectangles to facilitate automation. The restriction on the module organization of a floorplan is an important issue. Although in the most general case, the modules can have an arbitrary organization, imposing some restriction on the floorplans may have advantages. In general, there are two forms of Floorplan: (i) slicing floorplan, where floorplan can be bipartitioned into two sliceable floorplans with a horizontal or vertical cut line, (ii) non-slicing floorplan, where, defined modules in the layout cannot be attained by any bisection, either horizontally or vertically.
Usually, total defined Area for floorplan is larger through slicing floorplan representation in comparison to the non-slicing floorplan. Also, depending upon the fixed aspect ratio or the variable aspect ratio, nature of modules can be hard and soft. Hence, there is more concentration in the designing of floorplan with the non-slice approach. There are a number of different approaches have applied previously in the representation of non-slicing floorplans like sequence-based approach, transitive closure graph, corner list approach, as well as tree-based approach, etc. Because of NP-hard complexity involved with floorplanning, application of stochastic algorithms in the designing the better floorplan is an active area of research for EDA community. Simulated annealing (SA) technique applied previously and had been explored very well. Performances of SA algorithm are appreciable with lesser number of modules, but demand computational resources with increasing the number of modules. Another variety of stochastic methods which is a population-based heuristic has become the area of interest by researchers.
Diagrammatic representation of taxonomy.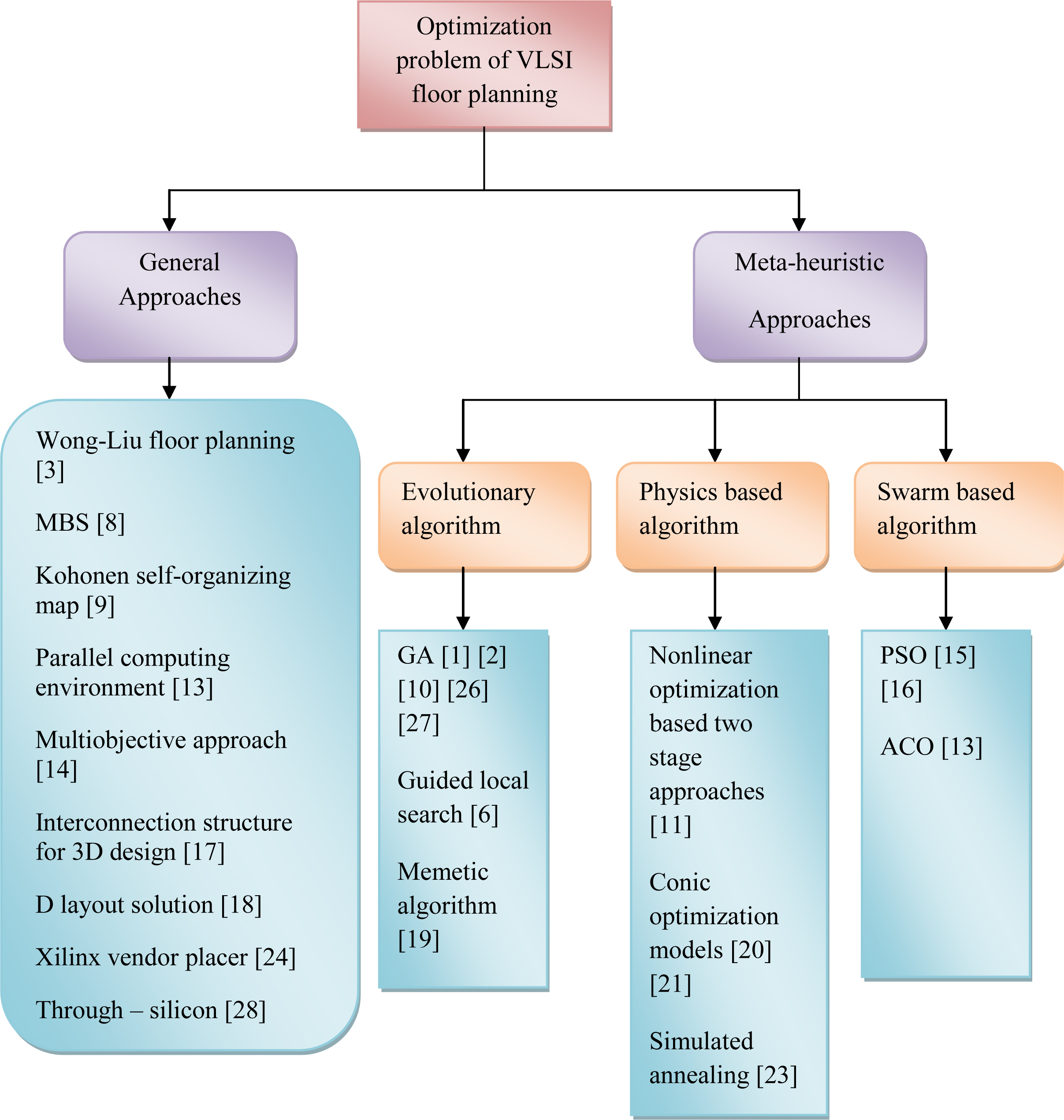
Broadly, two categories: evolutionary computation and swarm intelligence have shown the great possibilities among them like genetic algorithm, differential evolution, memetic algorithm, PSO, ABC, etc. are a major contributor. Previous research over these algorithms has a limitation in exploration and exploitation capability so that an optimal solution could achieve. Previous research in the design of VLSI floorplanning algorithms has given less attention in this direction.
Generally, floorplanning design is an overview of the traditional placement problem in that all modules are rectangular rigid modules. Conventional optimization methods are no longer effectual for this overall issue. A floorplan design method ought to be able to take benefit of the freedom of choosing a representative with many options for each flexible module. Hence, to overcome these issues a PSO variant optimization method known as MSAPSO method is proposed.
The main intend of this paper is to propose a novel PSO variant referred as MSAPSO method to solve the problem of floorplanning in VLSI. The proposed method has the multicultural integration that provides the ability to explore the solution space faster and efficiently when compared to the conventional methods.
Performance parameters and constraints involved in the chip design like chip size, electrical characteristics, timing constraints, etc. are prime important where Floorplanning is considered as a central design flow to optimize the objectives. Research over the chip design is a very active area, and many floorplan tools have been proposed. In many cases, outcomes of floorplan are subjective in terms of “who has defined it” and initial condition environment. Figure 1 demonstrates the taxonomy classification. Here, it classified into general and meta-heuristic approaches.
Flowchart of PSO.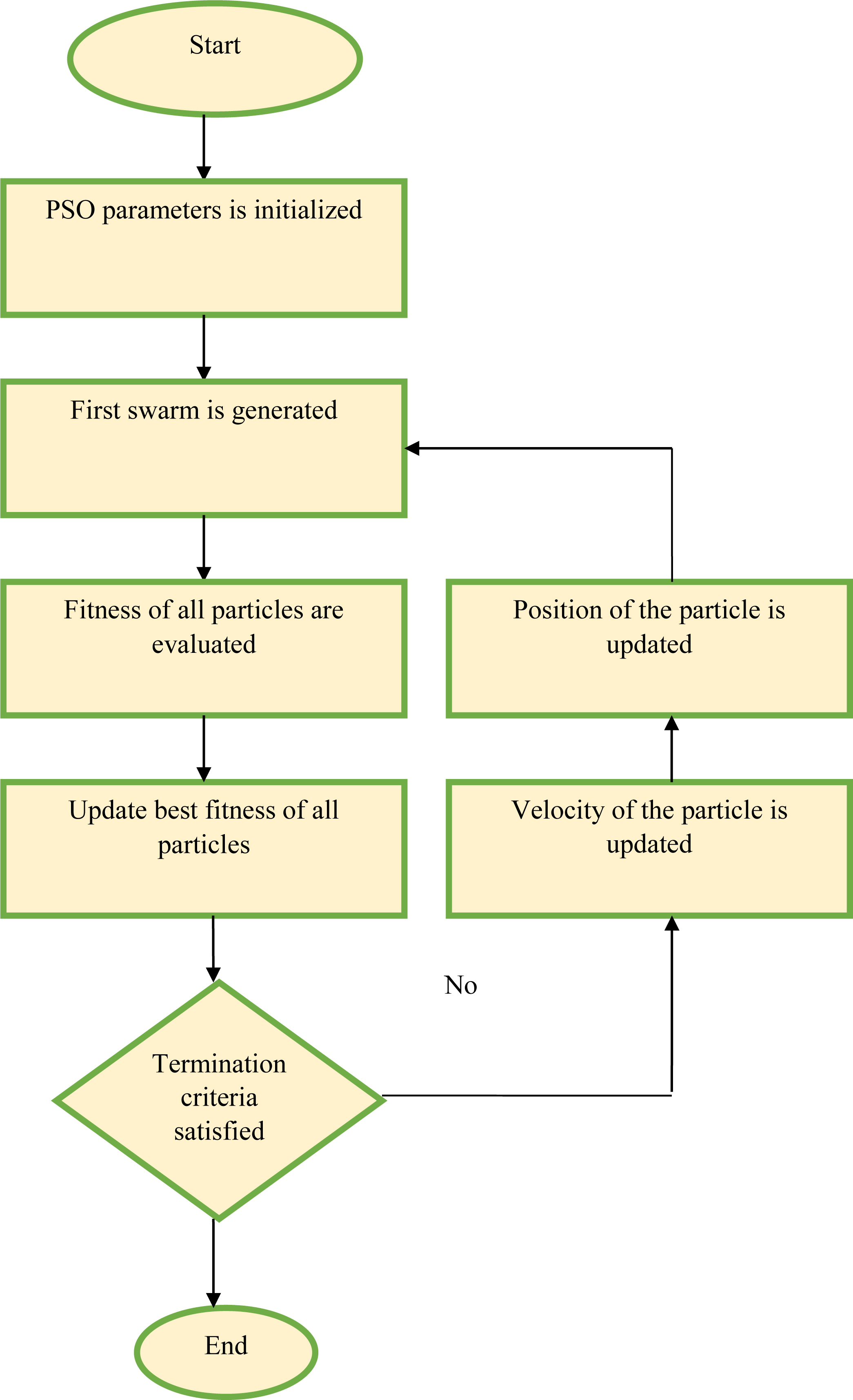
A floorplanning approach based on Wong-Liu floorplanning algorithm has been proposed [3] and considering the interconnect planning with floorplanning simultaneously. Moving block sequence (MBS) based representation of floorplan has discussed [8] for nonslicing floorplan. The MBS does not apply the extra constraints over the solution space, hence suitable for evolutionary algorithms; hence, an organizational evolutionary algorithm is designed with the intrinsic properties of MBS. A neural network based on Kohonen self-organizing map has applied [9] to the floorplanning where the transformation of the abstract specification of the design has given a set of suitable input vectors, which fed to the network at arbitrary. Parallel computing environment approach has been proposed [13] to maximize the throughput of solution space search. The multiobjective approach has applied [14] for layout area as well as interconnection wirelength of chips by means of PSO. Various important design issues and interconnection structure for 3D design in VLSI has proposed [17], 2.5-D layout solution has proposed [18] for floorplanning to reduce the length of interconnection. With the help of initial placement deliver by Xilinx vendor placer, a solution has proposed [24] for floorplanning. Floorplanning for 3D Ics has proposed [28] in which Through-silicon vias (TSVs) has applied to optimize the delay because of wires and TSVs.
Non-overlapping constraint definition
Non-overlapping constraint definition
MSAPSO flow diagram.
In [1], authors have proposed an idea to define a better initial point for floorplanning with the use of Genetic Algorithms. An encoding scheme based on normalized postfix for a genetic algorithm (GA) has proposed [2] to solve floorplanning problem. The idea of target distance, which was developed by Etawil and Vannelli has been extended [4] in order to obtain the AR (Attractor-Repeller) model. In [5], a tabu search based circuit bi-partitioning approach has presented, which partitions circuits with the aim of decreasing the size of the cutset between the partitions. Subsequently, they have used tabu search approaches beside with the force directed placement approaches so as to achieve the physical placement of VLSI circuits on regular two-dimensional arrays with the aim of decreasing the placement time. Cell placement problem has been considered [6] through Guided Local Search (GLS) metaheuristic approach where the objective has considered to minimize total bounding box net length. A theoretical upper bound for slicing floorplans has presented [7] with soft modules. Using O-tree representation, the concept of genetic algorithm has applied to the VLSI floorplanning problem [10]. In [11], a nonlinear optimization based two-stage approach has applied, where a two-stage nonlinear-optimization-based methodology have proposed, which is specially designed in order to minimize the wire length when concurrently enforce an aspect ratio constraints on soft modules as well as it handles a zero dead space situation. The ant colony optimization based solution has proposed [12] to minimize the area under floorplanning
A solution representation in population for PSO
A solution representation in population for PSO
Third order IIR filter.
which includes the clustering constraints. Three-dimensional integration based floorplanning has proposed [15] and handles the complexity of larger solution space because of multiple devices. 3D floorplanning with both 2D blocks and 3D blocks has considered. PSO and GA based a hybrid approach has in applied [16] to obtain the feasible floorplan. Hybridization has applied in hopes of not to trap in local minima and the increment in level of diversity. Memetic algorithm based concept has applied [19] to handle the modular assignment problem. B* tree based floorplanning algorithm has proposed [20]. Conic optimization models for facility layout and VLSI floorplanning problems have presented [21]. Conic Optimization concept has applied to solve the single row facility layout and fixed-outline-floorplanning like [22], fixed boundary floorplanning has achieved through a step size optimization for conjugate gradient minimization. Simulated annealing based concept has applied [23] to reduce the unused area considering the objectives as minimizing area and wire length. In the hope of betterment, two stages based
Modules dimensions’ definition along with their connectivity
Performances by different algorithms over IIR filter with population size 20
Statistical performances by algorithms over IIR filter for floorplanned area with population size 20
Statistical performances by algorithms over IIR filter for floorplanned wire length with population size 20
solution has been proposed [25]. The first stage carries the cut tree development using a Genetic algorithm and then in second stage convolution has given by the collective adoption of achieved cut tree in the first stage. A hybrid heuristic, based on PSO and GA has been proposed [26] for are duction in area and wirelength under floorplan along with hotspot by distributing the temperature
Performance by different algorithm over IIR filter with population size 50
Statistical performances by algorithms over IIR filter for floorplanned area with population size 50
Statistical performances by algorithms over IIR filter for floorplanned wire length with population size 50
Performance by different algorithms over IIR filter with population size 100
uniformly over the chip. The initialfloorplanwas achieved through B*-tree, and later a PSO-GA has applied to optimize the placement. A variation of VLSI floorplanning problem called designing test cite chips, where the placement of the rectangular macros takes place without overlap and contains no wire among macros, has discussed [27].
Floorplan for IIR filter using MSAPSO with population size equal to 20.
Floorplan for IIR filter using SAPSO with population size equal to 20.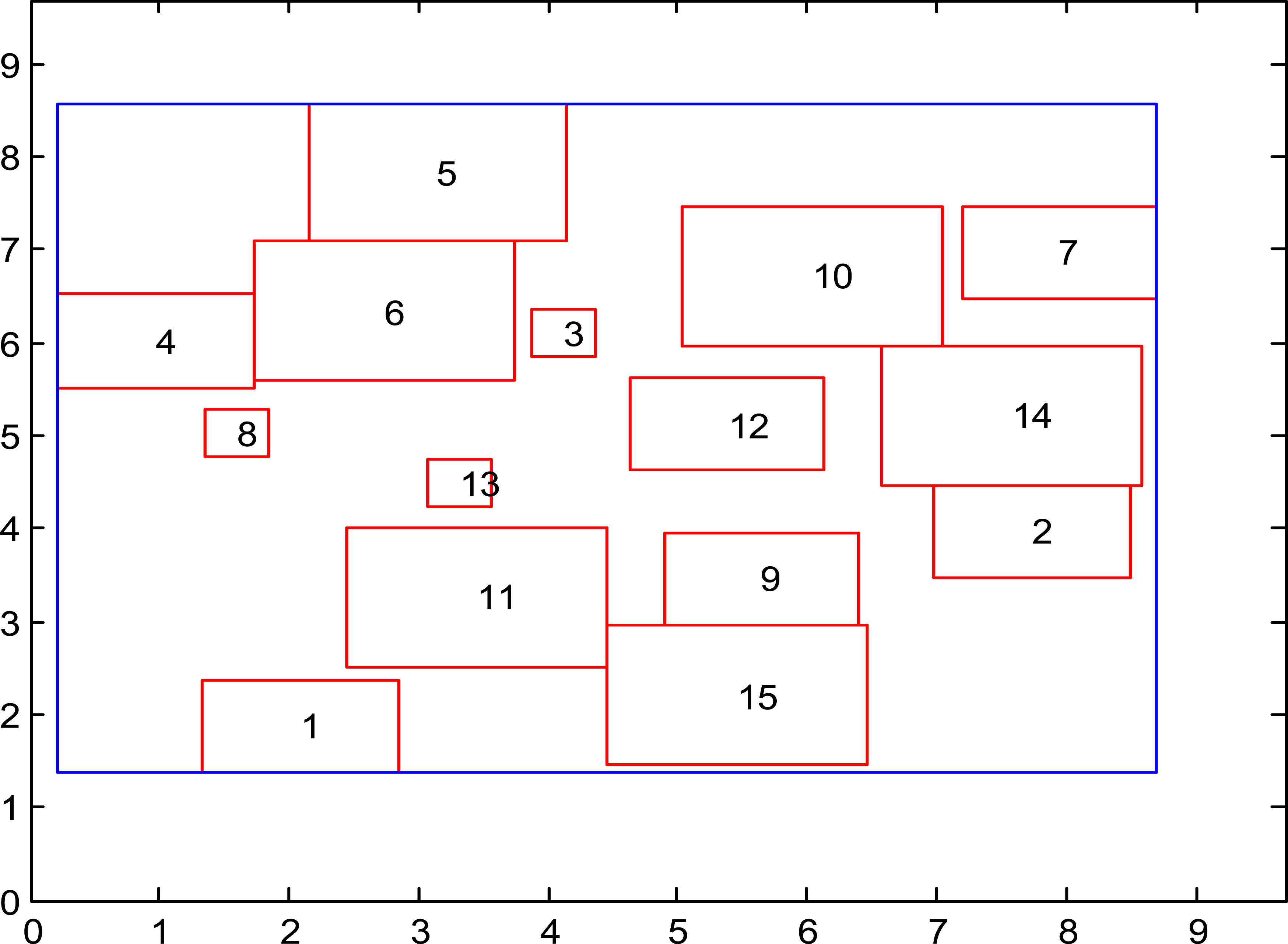
Statistical performances by algorithms over IIR filter for floorplanned area with population size 100
Floorplan for IIR filter using MSAPSO with population size equal to 50.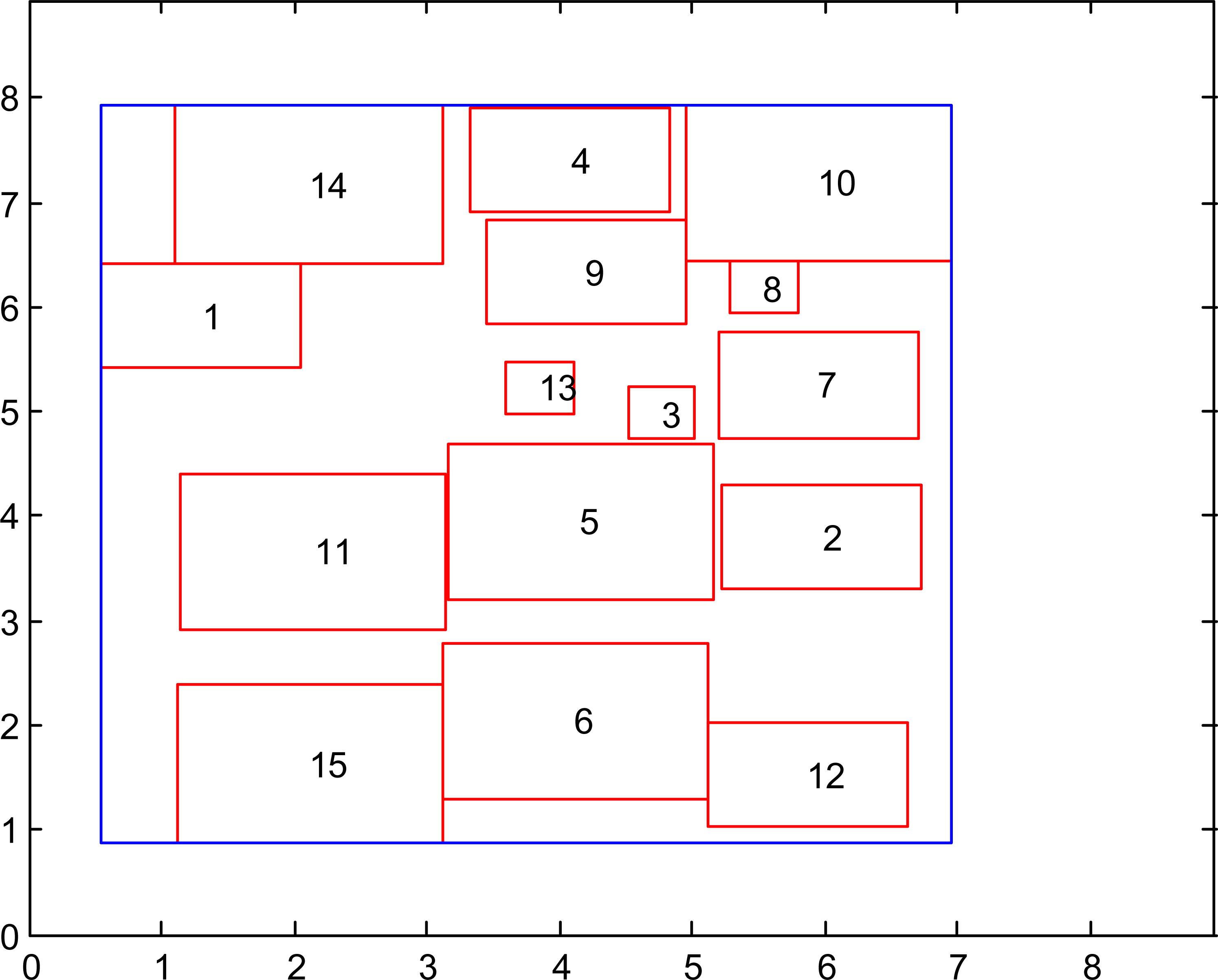
Floorplan for IIR filter using SAPSO with population size equal to 50.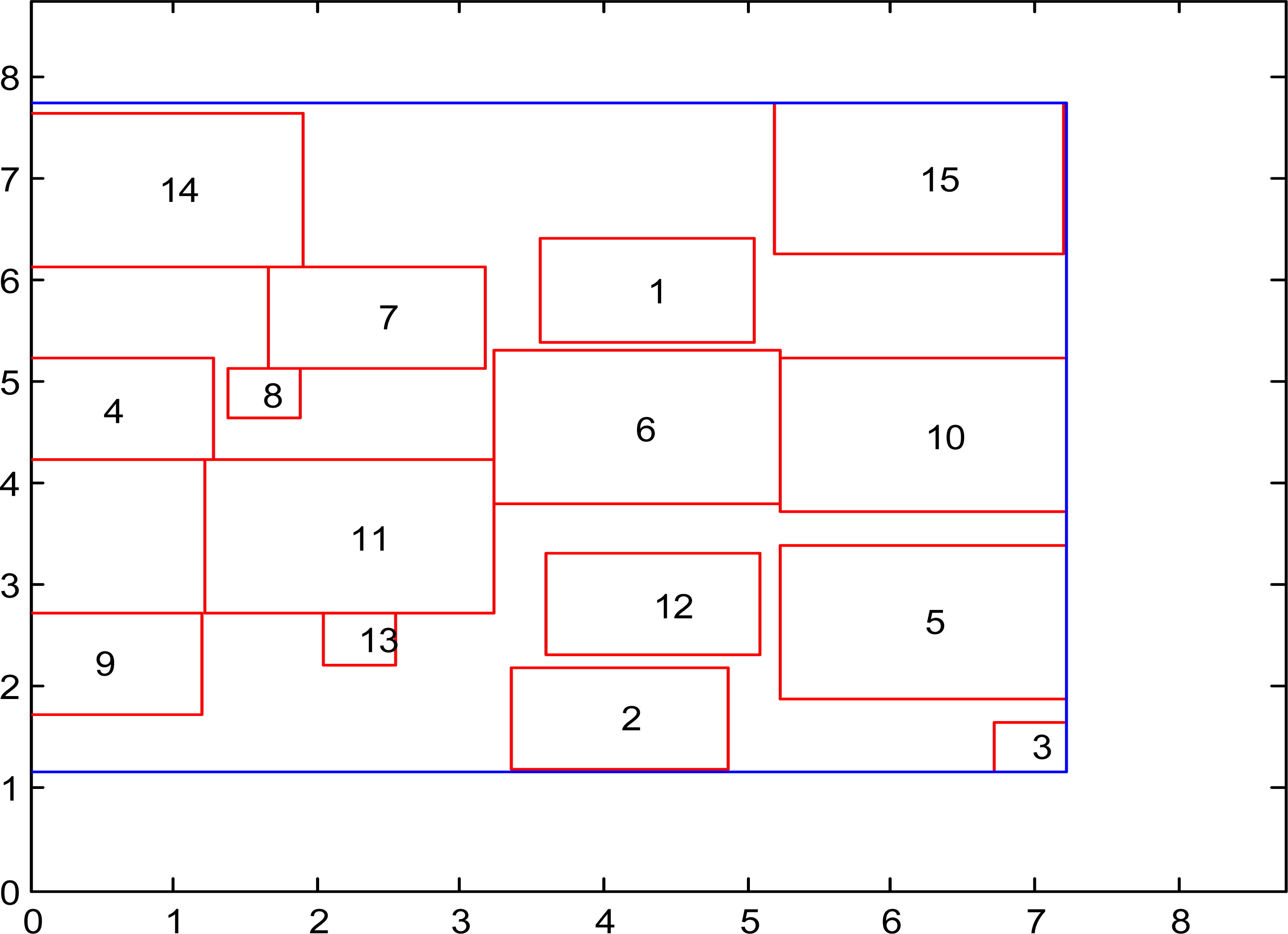
Statistical performances by algorithms over IIR filter for floorplanned wire length with population size 100
Floorplan for IIR filter using AWPSO with population size equal to 50.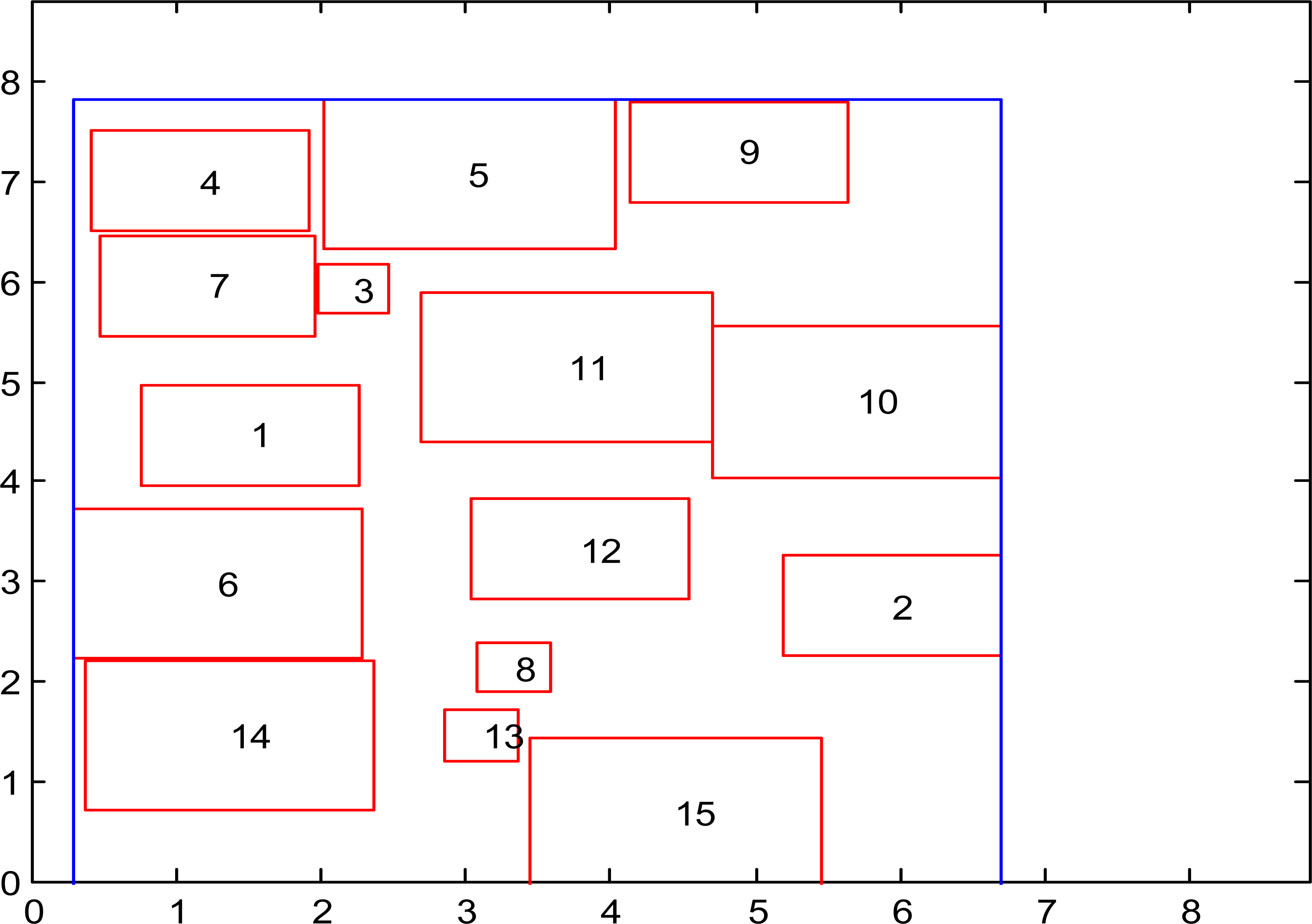
Comparative area convergence performance in IIR filter with population size 50.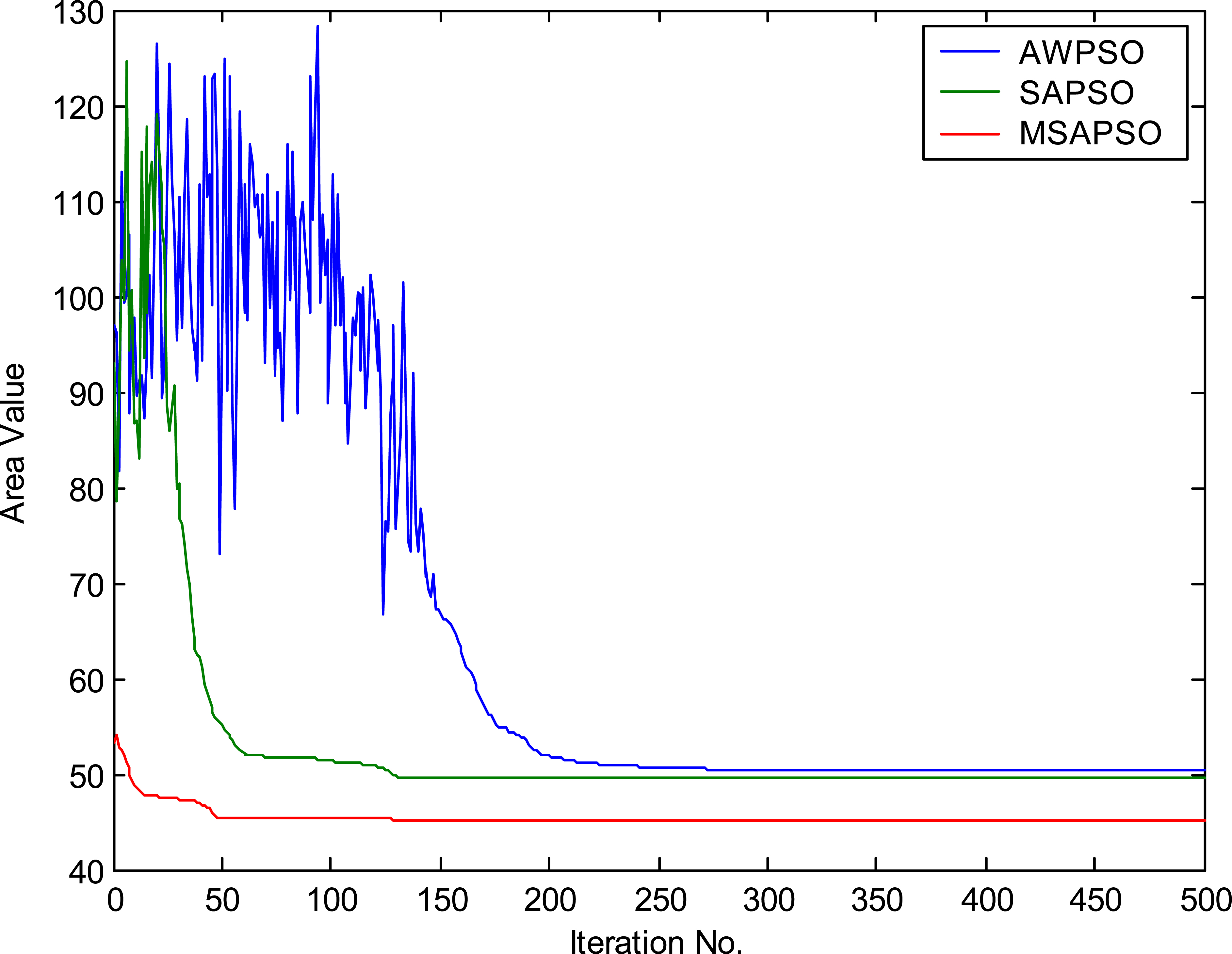
Let us assume that there is total “
Dimensions of each module with their forward path wire connection
Dimensions of each module with their forward path wire connection
Comparative wire length convergence performance in IIR filter with population size 50.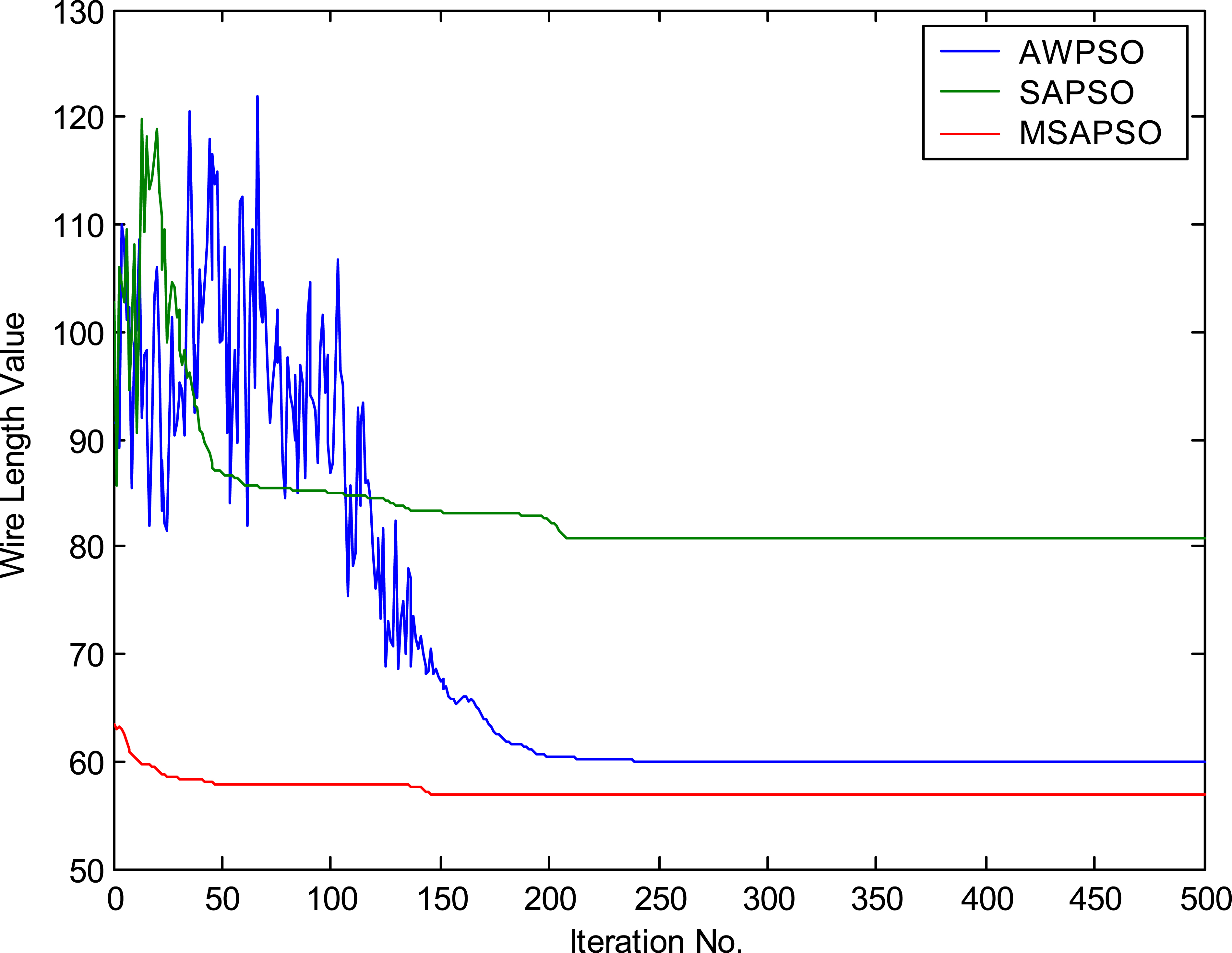
It is a very important constraint in the floorplanning and required an absolute zero violation to make the floorplan feasible. Any two modules
Performance by algorithms over Lattice filter with population size 20
Performance by algorithms over Lattice filter with population size 20
Statistical performances by algorithms over Lattice filter for floorplanned area with population size 20
Statistical performances by algorithms over Lattice filter for floorplanned wire length with population size 20
Performance by different algorithm over Lattice filter with population size 50
Statistical performances by algorithms over Lattice filter for floorplanned area with population size 50
Floorplan for IIR filter using MSAPSO with population size equal to 100.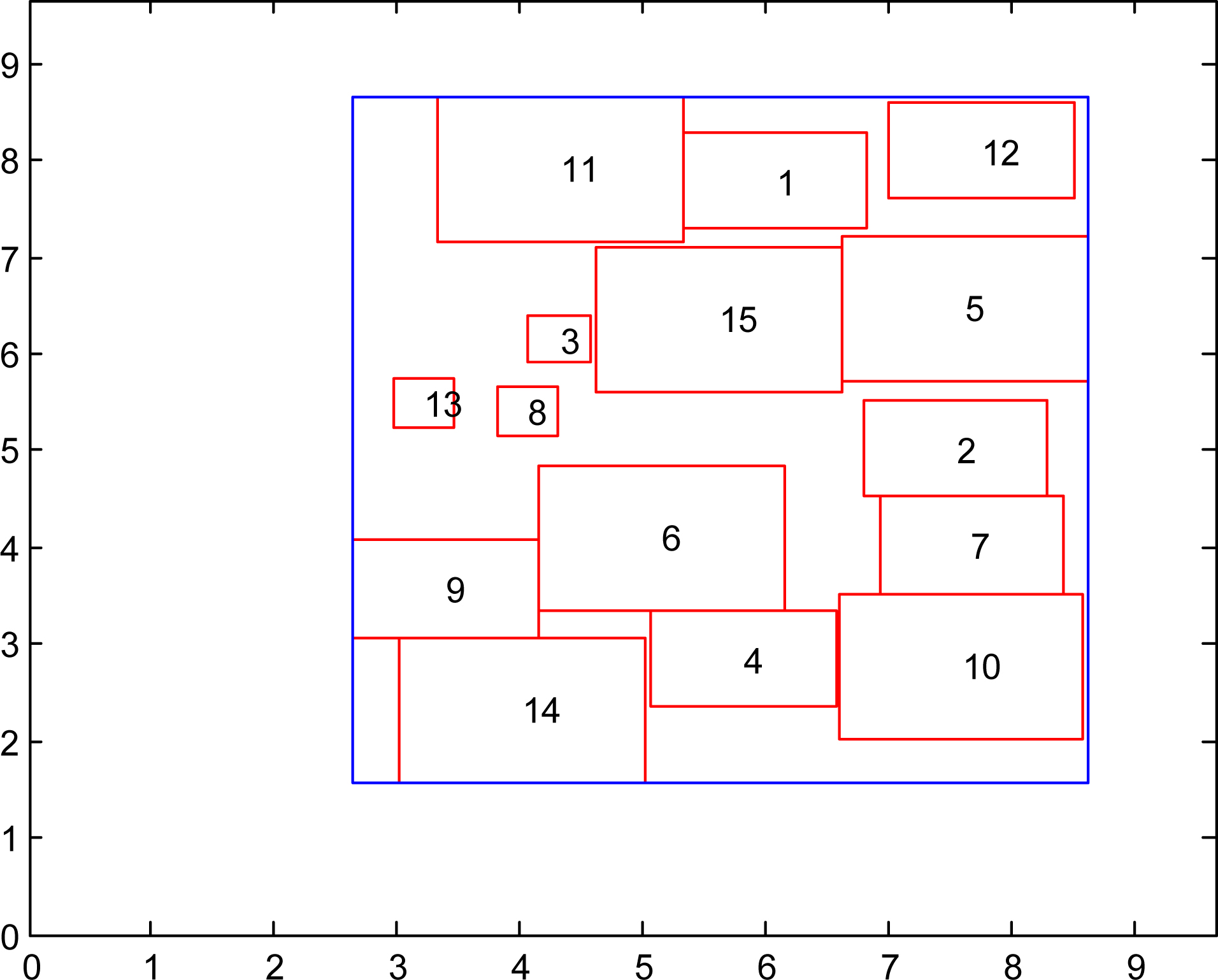
Diversity and corresponding inertia weight in MSAPSO with population size equal to 100.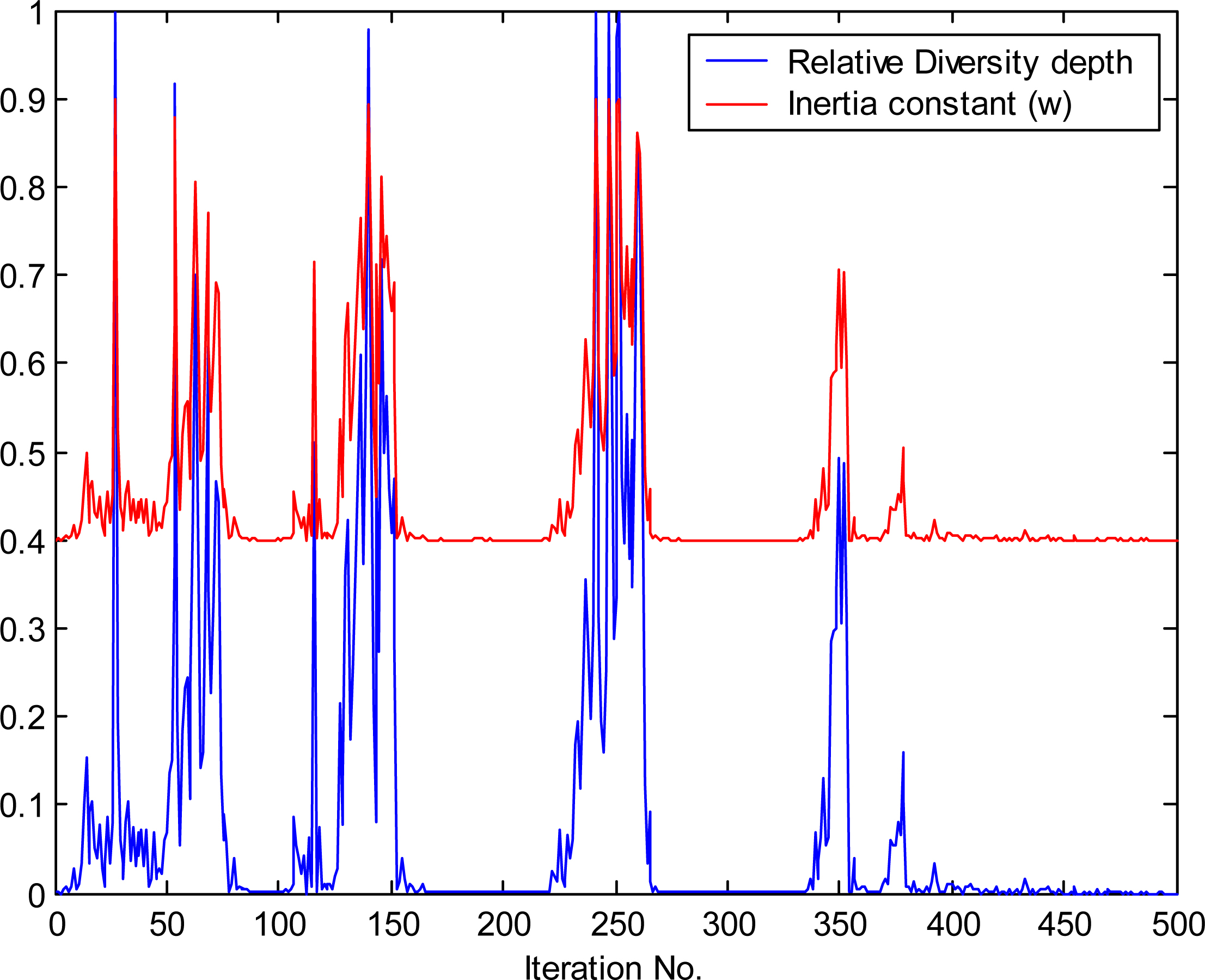
constraints satisfied in terms of their position in rectilinear coordinate as given in Table 1, where positions are represented in x and
Statistical performances by different algorithms over Lattice filter for floorplanned wire length with population size 50
Floorplan for IIR filter using SAPSO with population size equal to 100.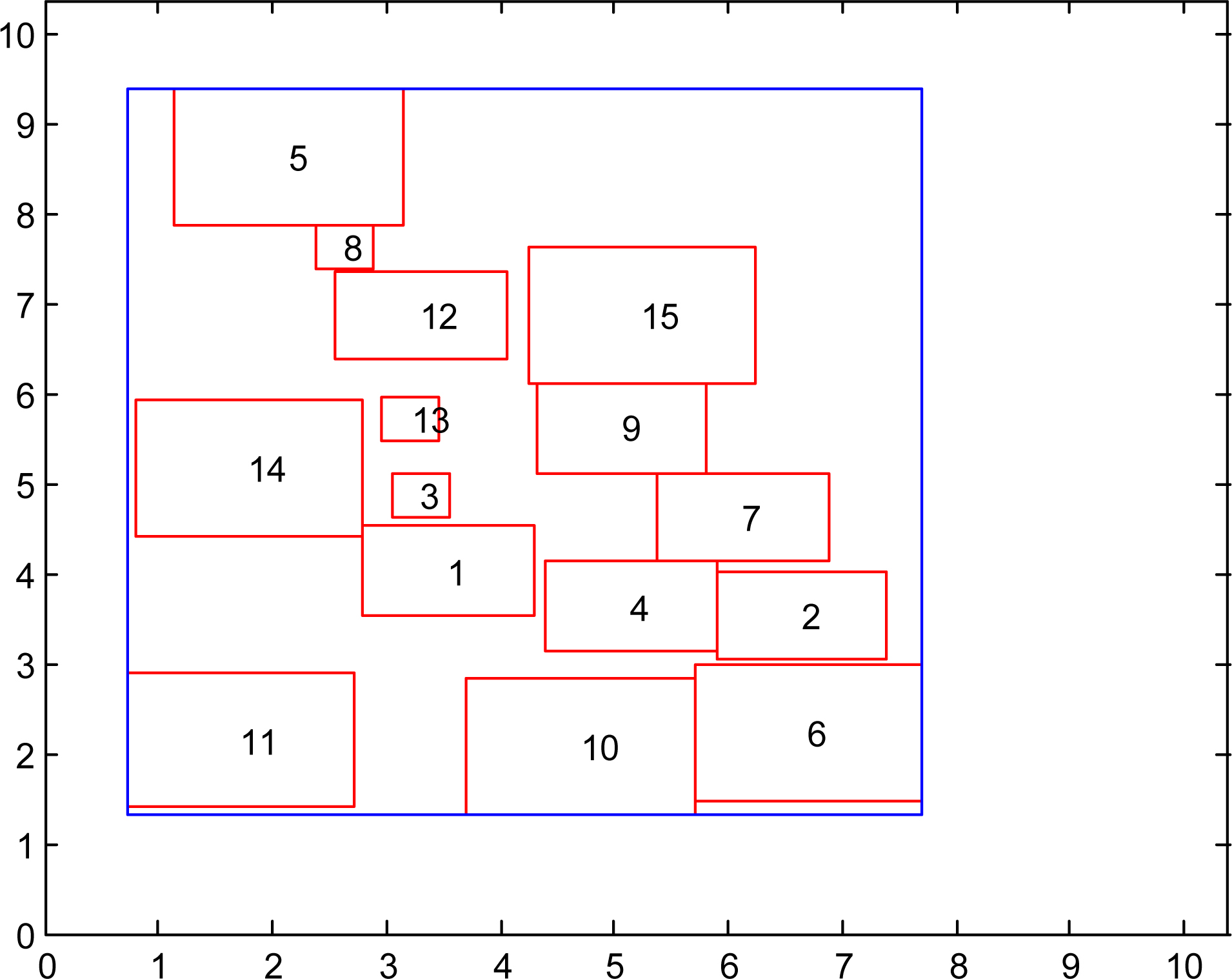
Diversity and corresponding inertia weight in SAPSO with population size equal to 100.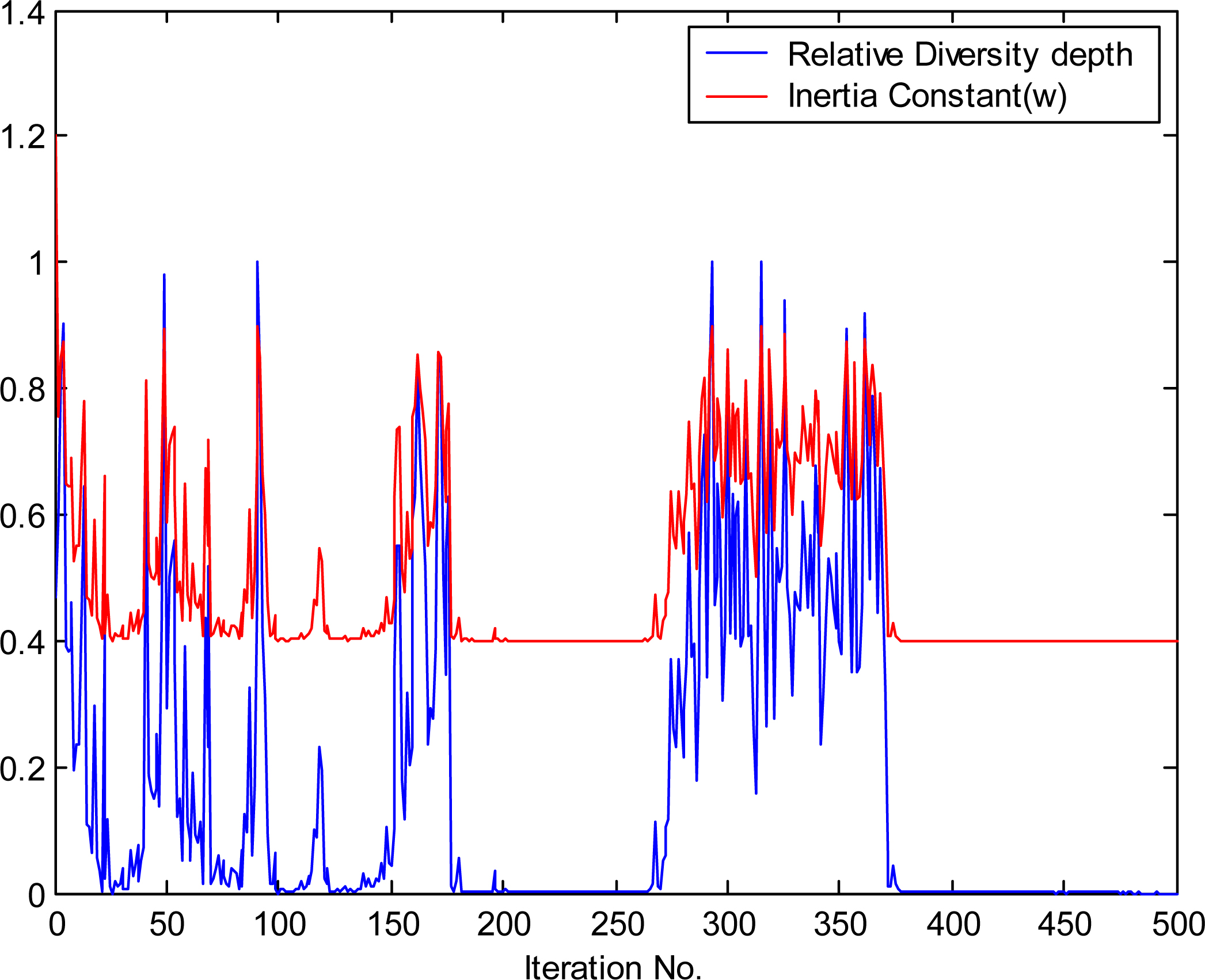
direction,
Performance by algorithms over Lattice filter with population size 100
Statistical performances by algorithms over Lattice filter for floorplanned area with population size 100
Floorplan for IIR filter using AWPSO with population size equal to 100.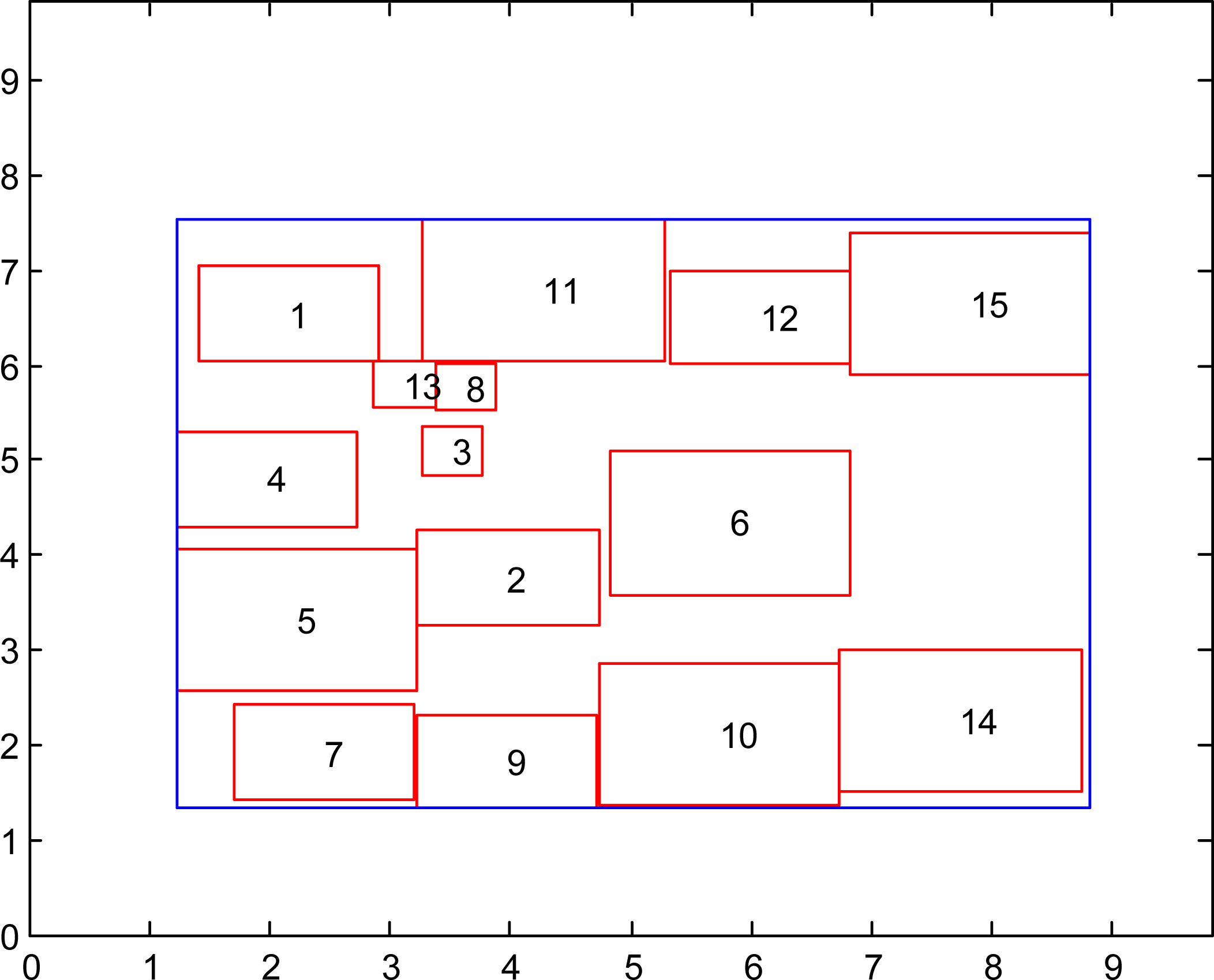
From automation point of view estimation of wire length among two connecting modules is computed by calculating Euclidean distance among their centers. Total wire lengths
Statistical performances by algorithms over Lattice filter for floorplanned wire length with population size 100
Statistical performances by algorithms over Lattice filter for floorplanned wire length with population size 100
Diversity and inertia weight in AWPSO with population size equal to 100.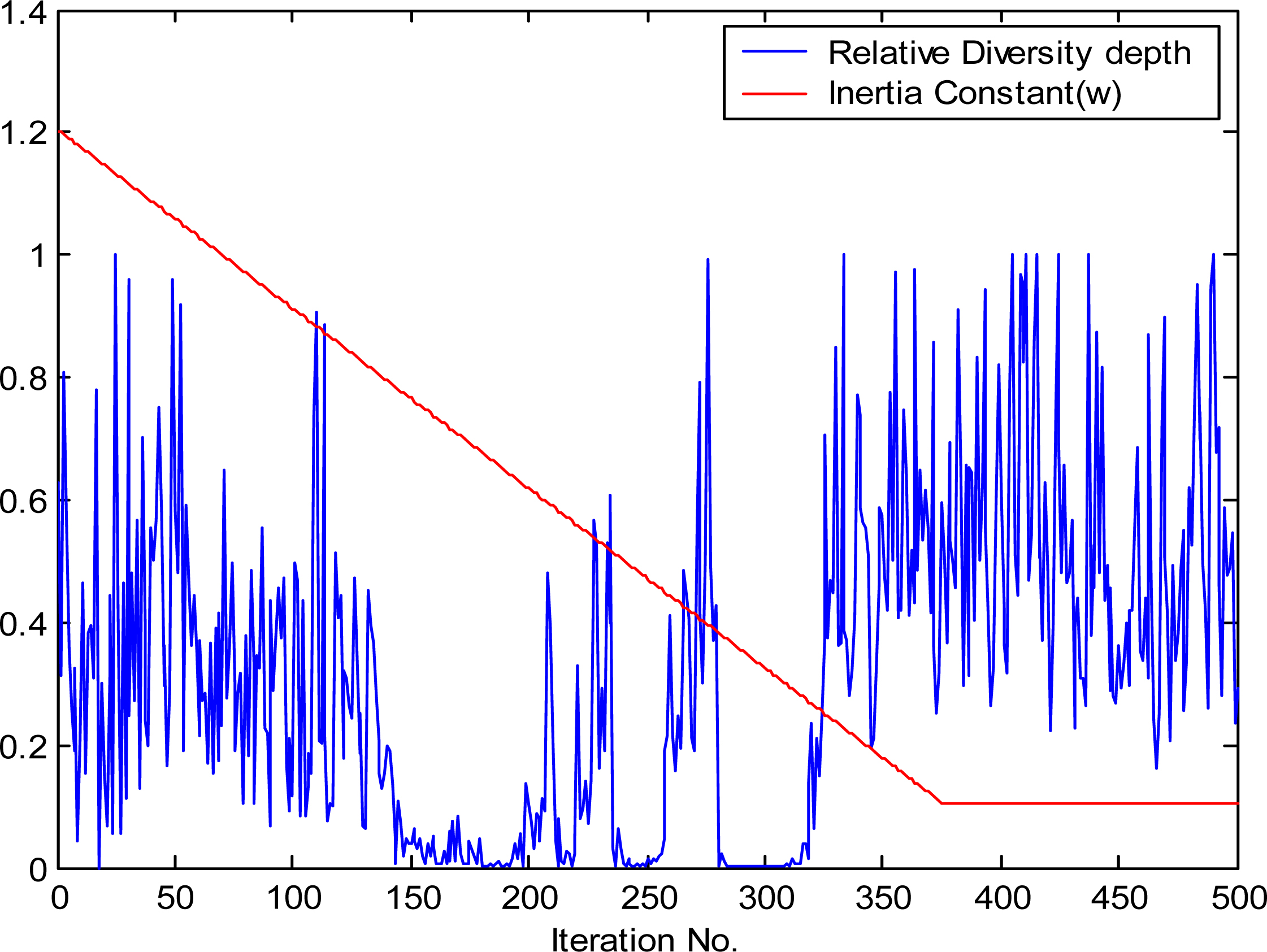
Comparative area convergence performance in IIR filter with population size 100.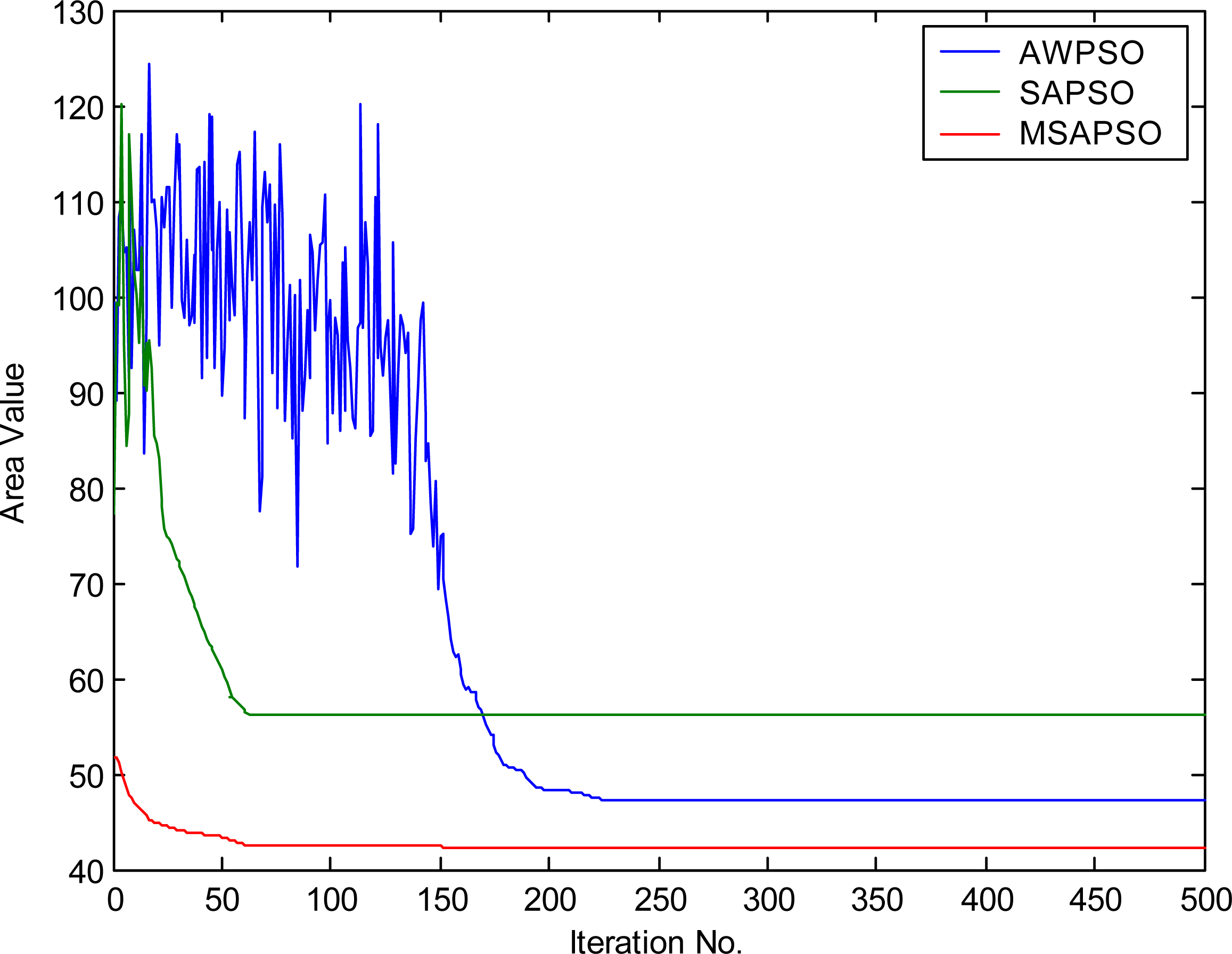
in floorplan are considered as the sum value of wire length required for all individual connections. Mathematically, estimation of wire length between centres of modules is given by Eq. (1).
where,
Area estimation: Total defined area by the floorplan is estimated as the minimum area of a rectangle, which is closed all the blocks.
Comparative wire length convergence performance in IIR filter with population size 100.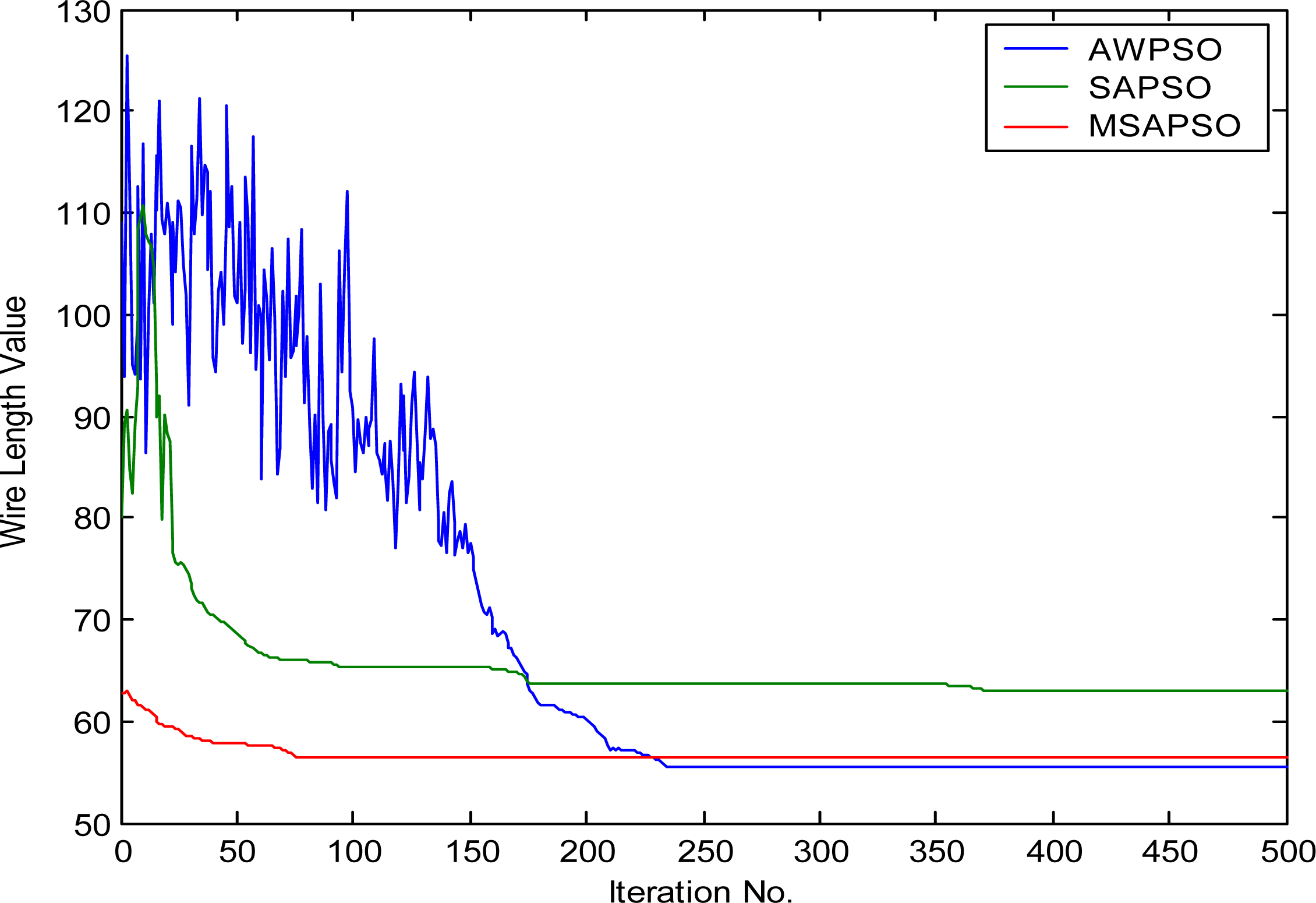
Lattice filter.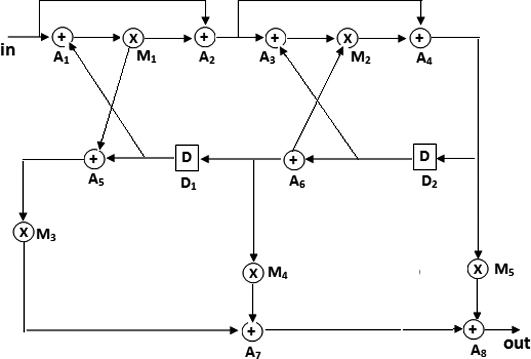
Floorplan for Lattice filter using MSAPSO with population size equal to 20.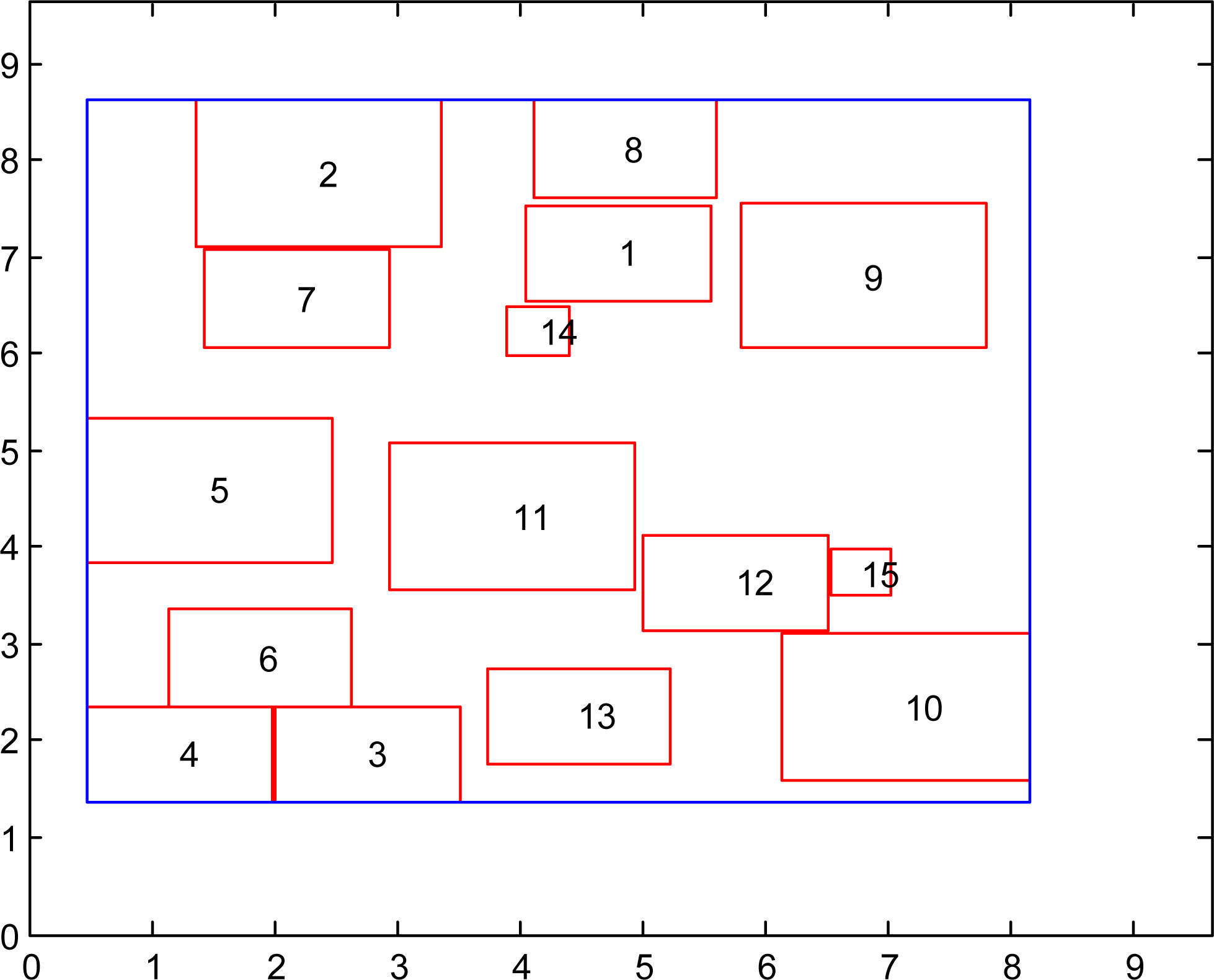
Floorplan for Lattice filter using SAPSO with population size equal to 20.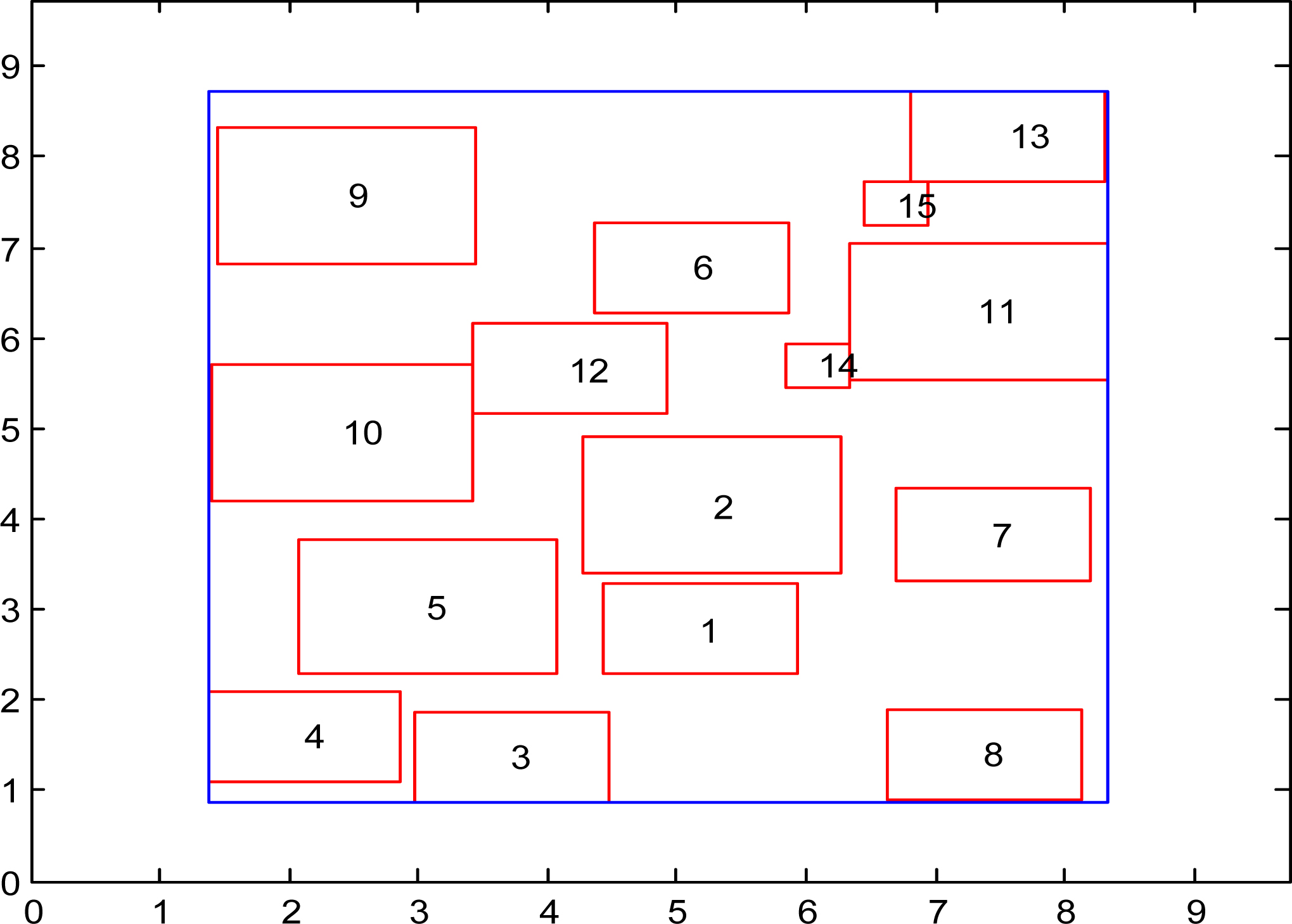
Floorplan for Lattice filter using AWPSO with population size equal to 20.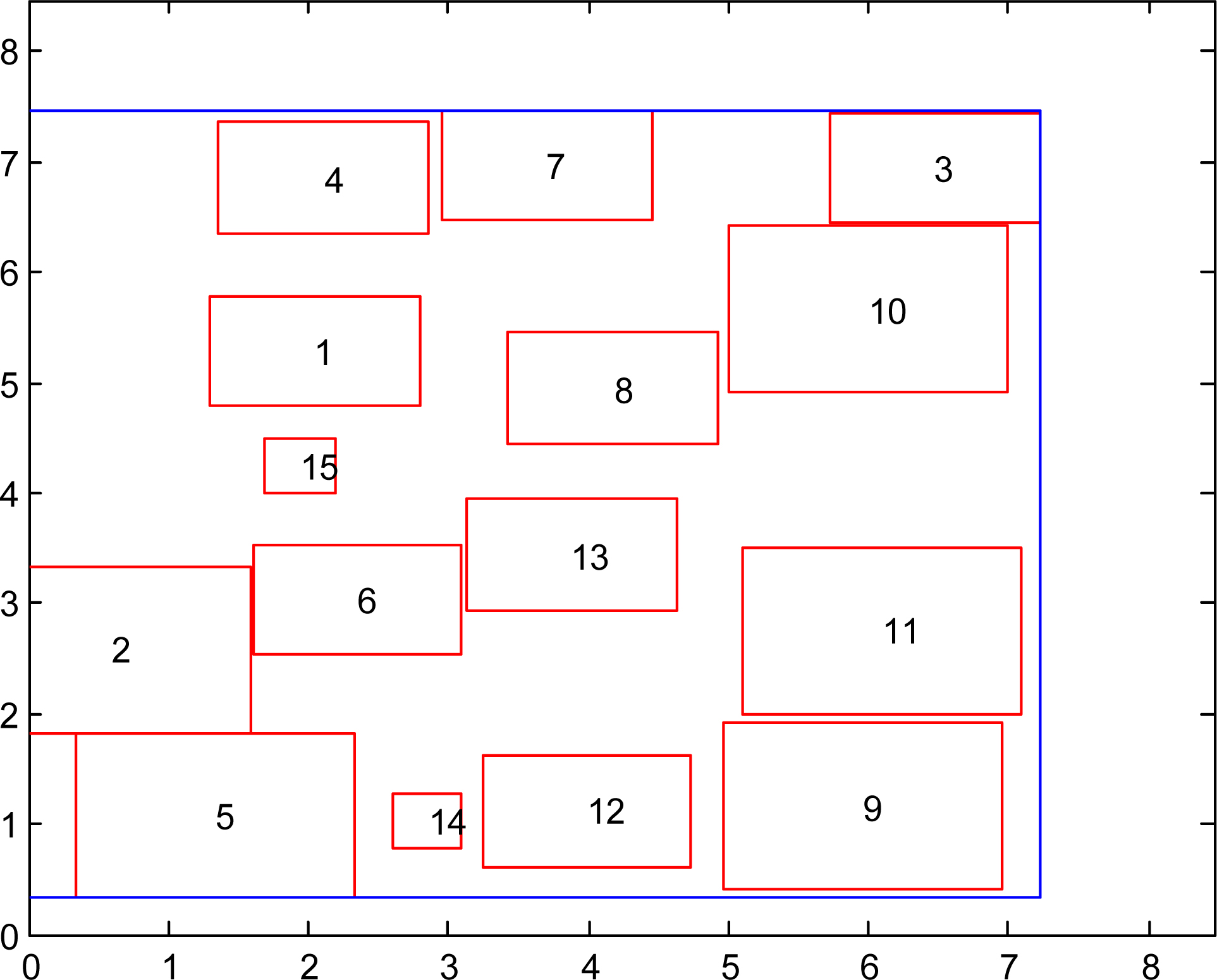
Objective function defines the mathematical relationship between objectives of interest and can be represented as cost factor which has to minimize. Until the objective function does not imbed the parameters properly, it is difficult to have an optimal solution at the end. In other words, objective function directs the direction in which the solution has to evolve. In this paper, objectives contain two parameters: area and interconnection wirelength, hence a weighted sum have defined as shown in Eq. (2). The constraint of non-overlapping can be mapped by increasing the cost factor by applying a high-value penalty as according to the number of violations to increase the cost value.
The cost function which encloses the area and wirelength together for a floorplan F is the weighted sum of the area and wirelength as defined in Eq. (2).
In this paper, floorplanning is considered as a minimization problem, where a parameter which has to minimize is the cost as defined in Eq. (2). Hence, the solution which has a higher value of cost, carry lesser fitness, while the solution has low-cost value, carry higher fitness.
The conventional PSO is a heuristic technique, which processes a population of possible solutions to the issue under consideration to explore the search space with social influences. Here, each member of the population has position changing factor in terms of velocity which is a function of memory (remember the best-achieved solution in the past), global best achieved at present and some random perturbation. This mechanism provides facilities for an individual to get something new their status as well as be bound with the population. Mathematical modeling can be represented by defining the three populations. Assuming that there is D number of parameters in the problem, hence the search space is D dimensional. For the i-th member of the population three D-dimensional vectors can be represented by the velocity vector
Floorplan for Lattice filter using MSAPSO with population size equal to 50.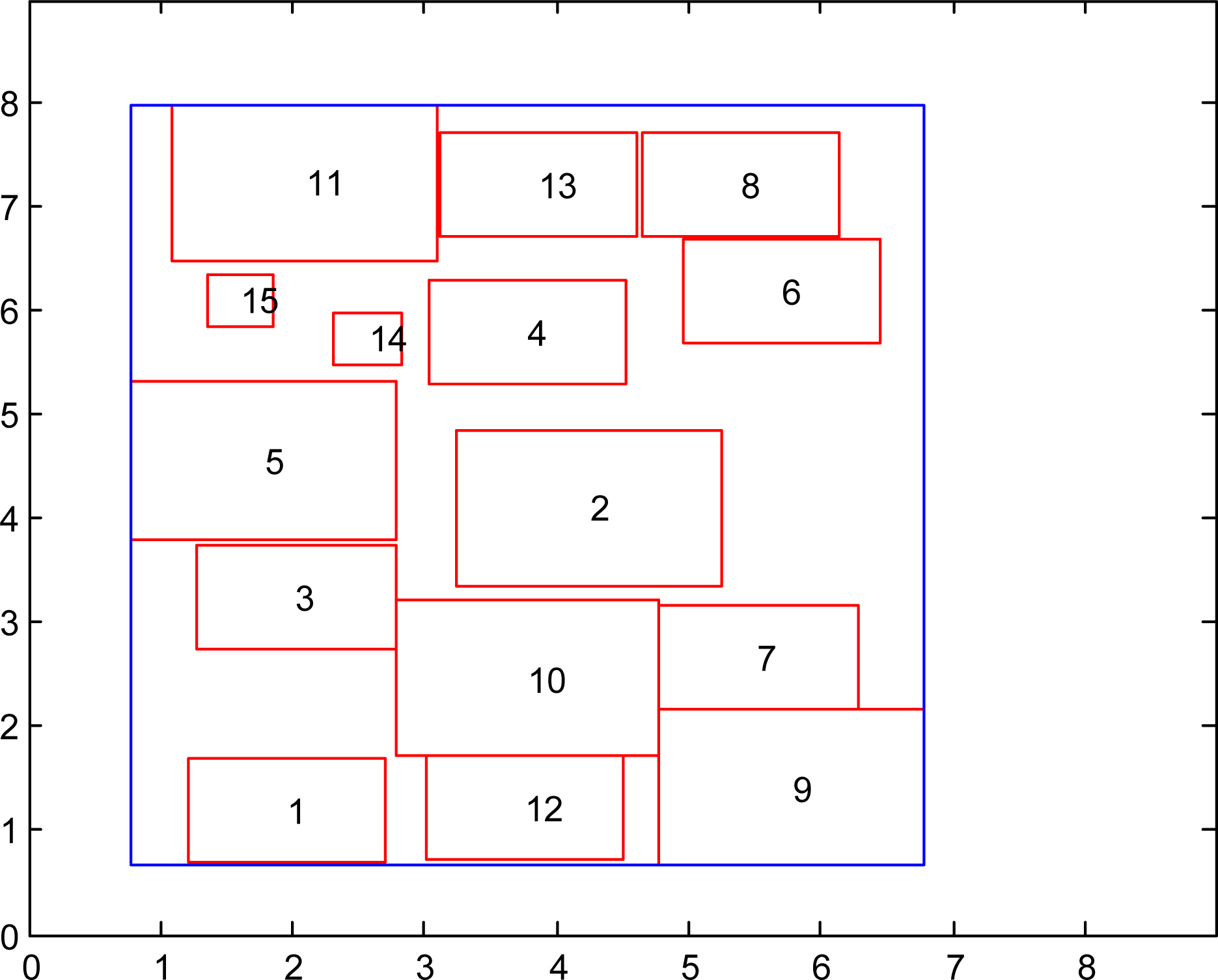
Diversity and inertia weight in MSAPSO with population size equal to 50.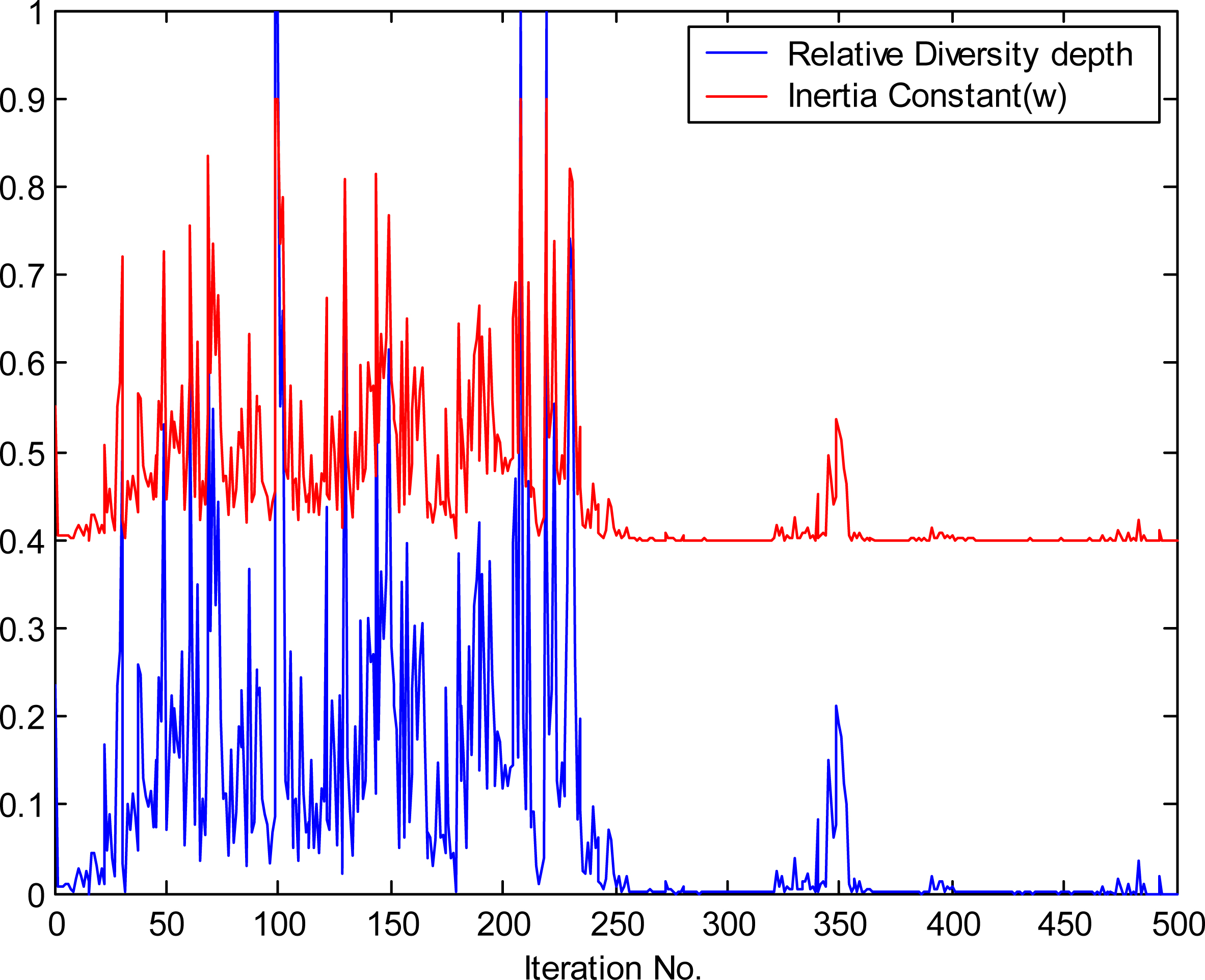
Floorplan for Lattice filter using SAPSO with population size equal to 50.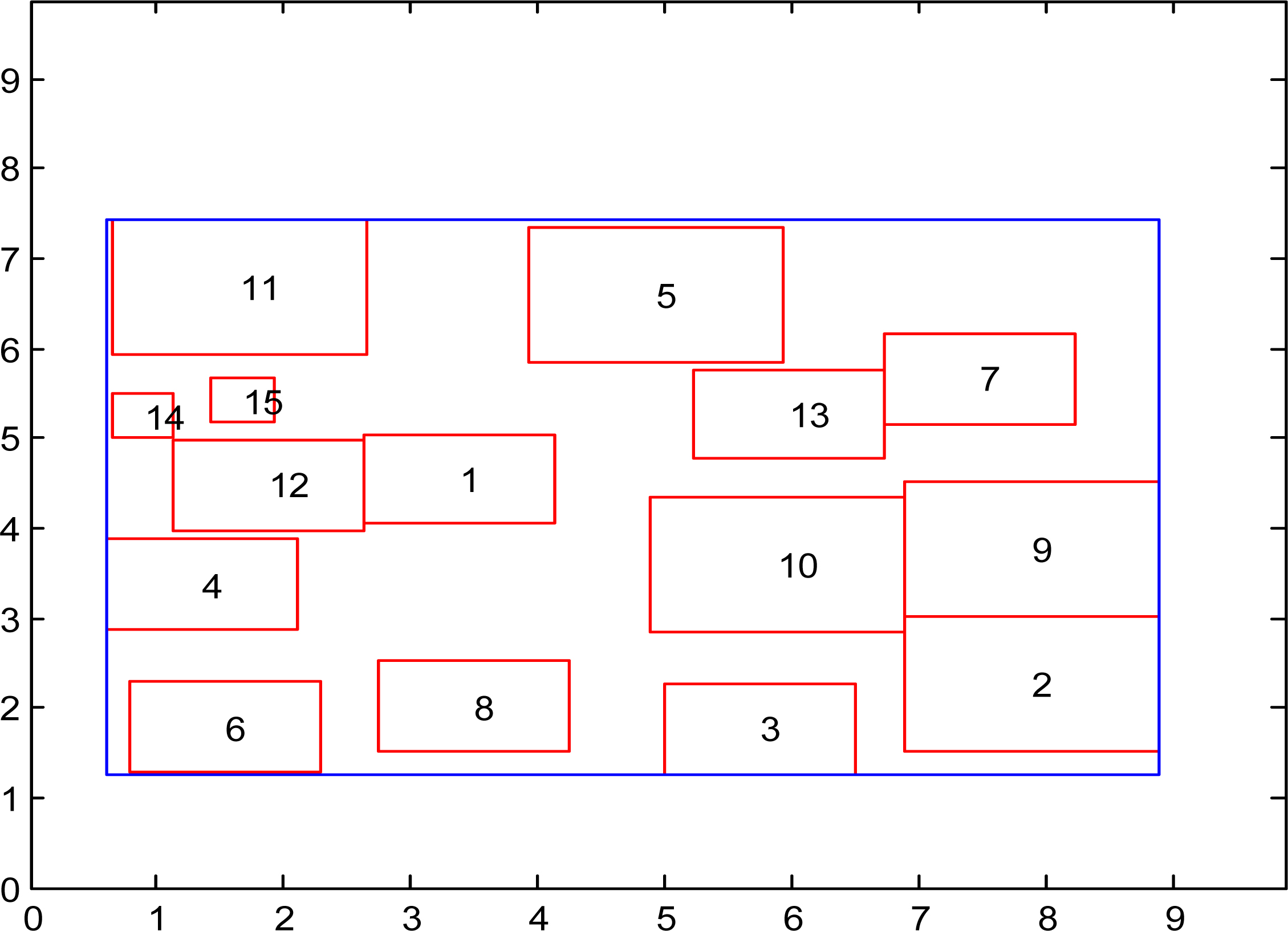
Diversity and inertia weight in SAPSO with population size equal to 50.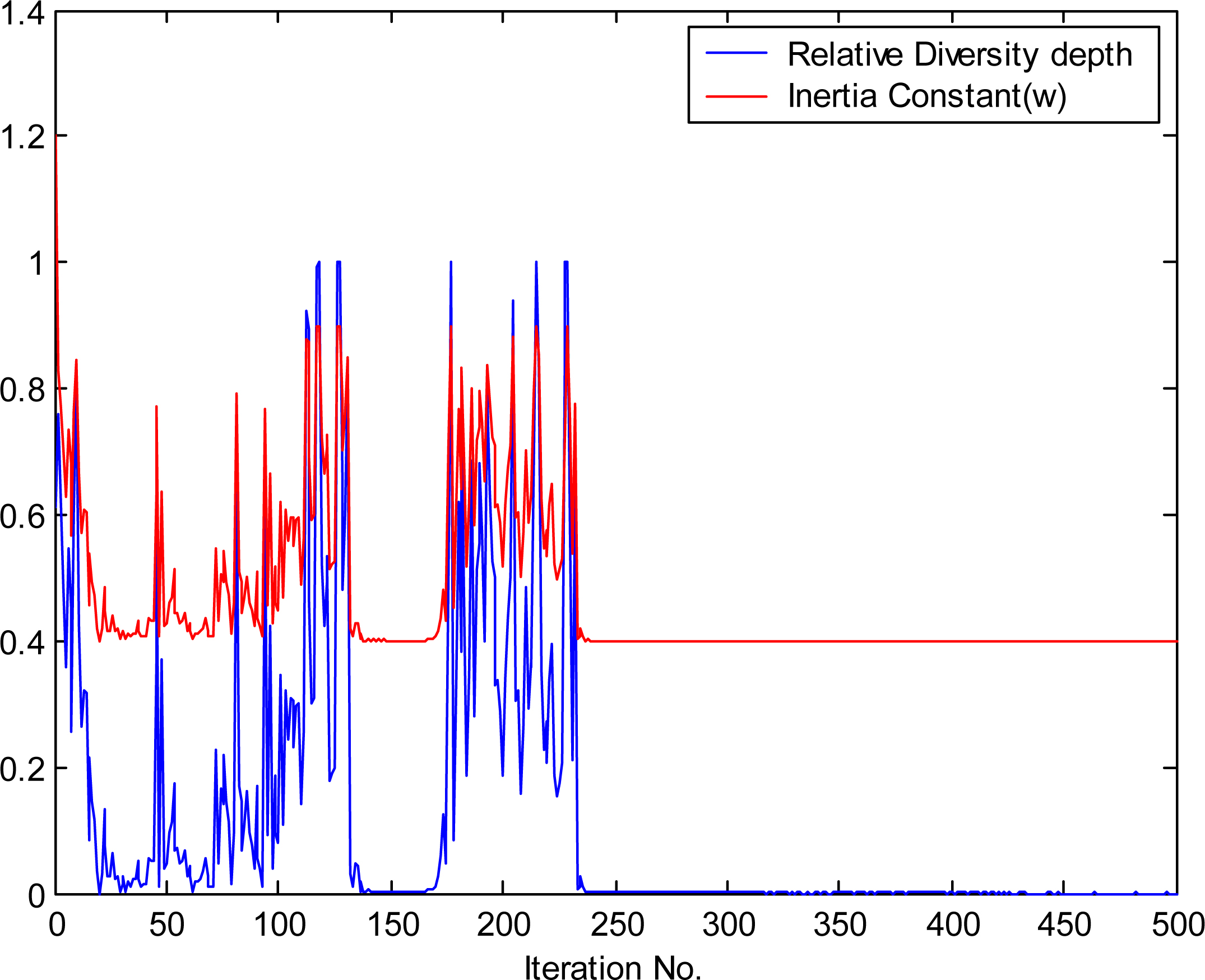
Floorplan for Lattice filter using AWPSO with population size equal to 50.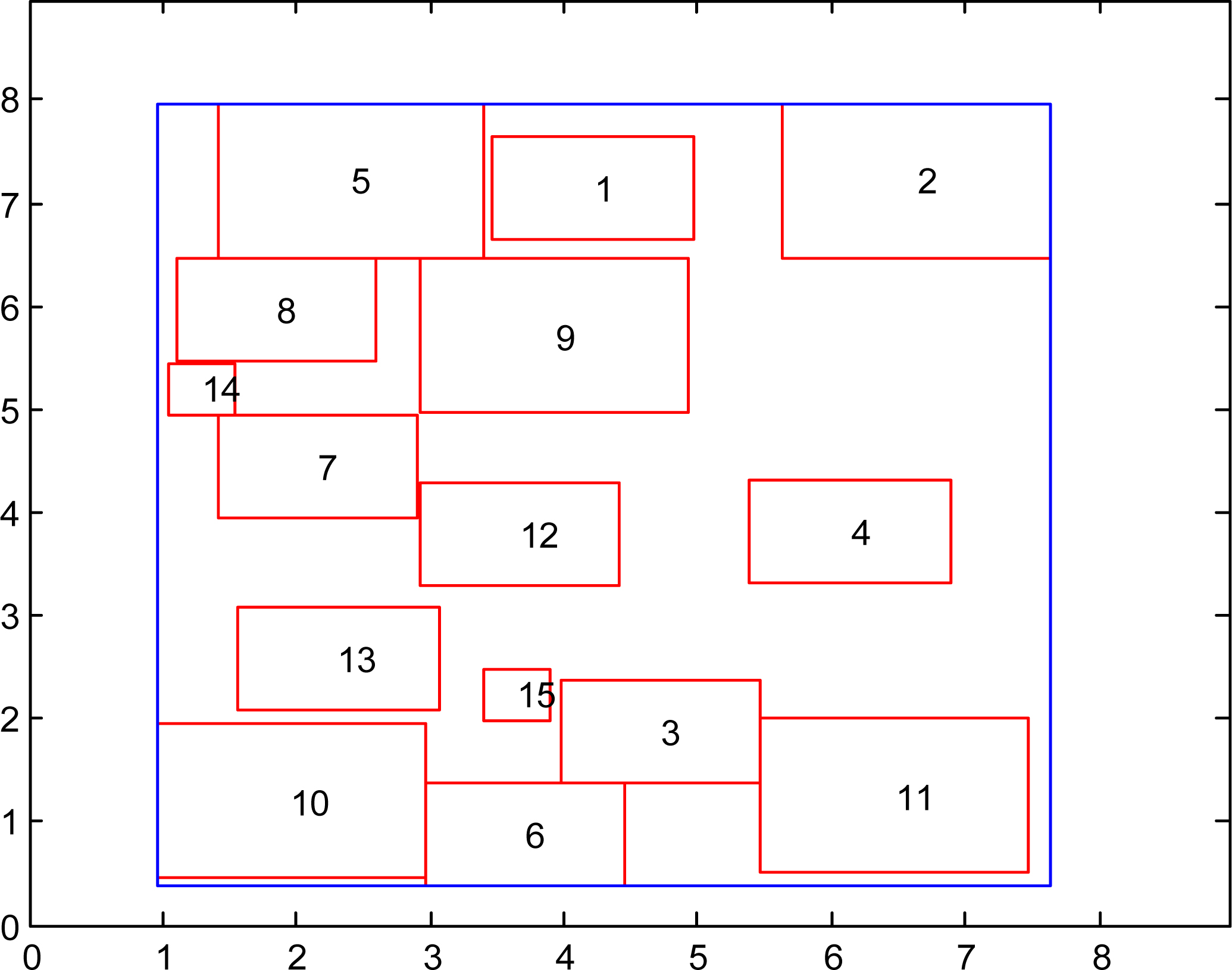
Diversity and inertia weight in AWPSO with population size equal to 50.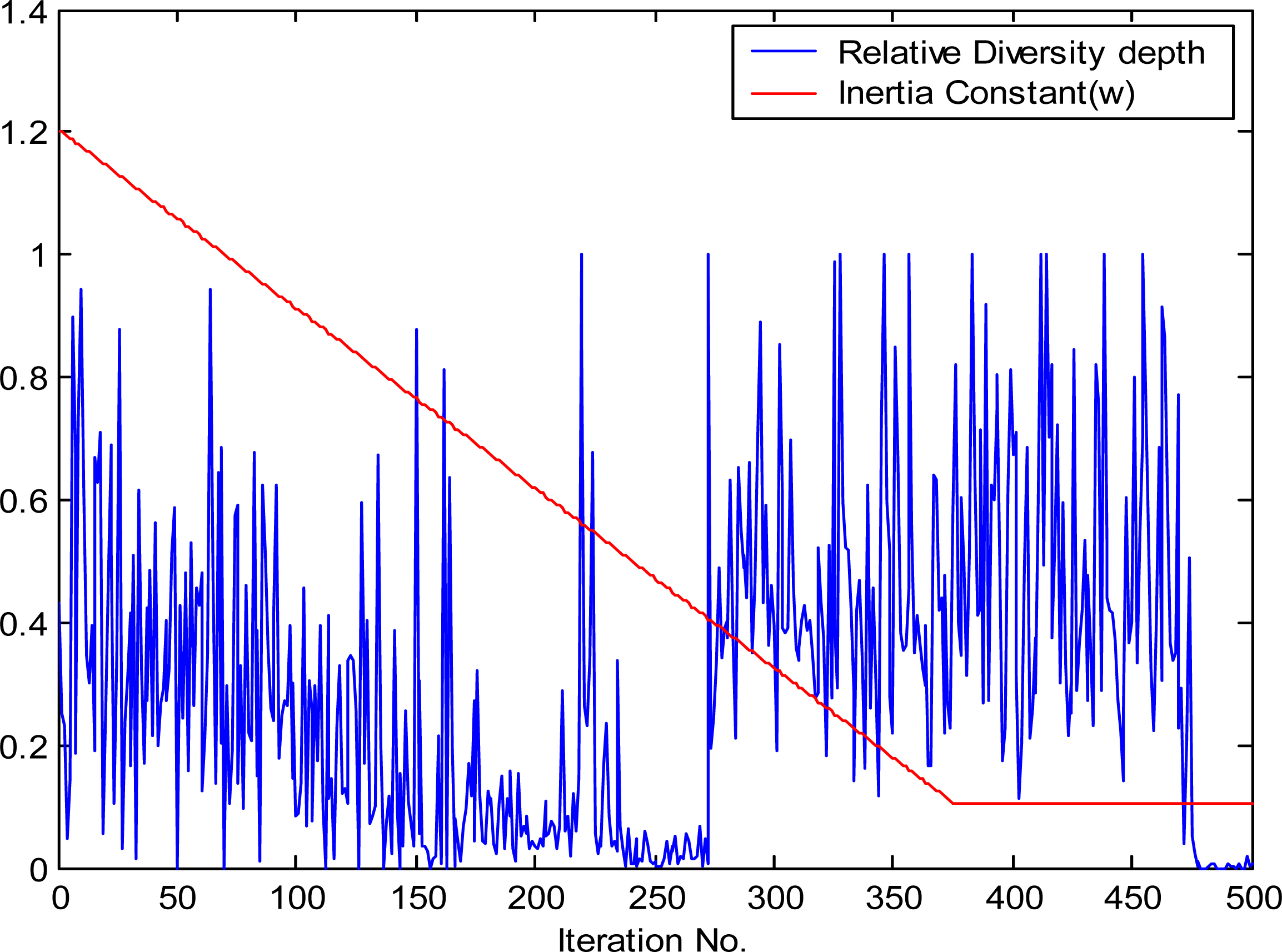
Comparative area performance in Lattice filter with population size 50.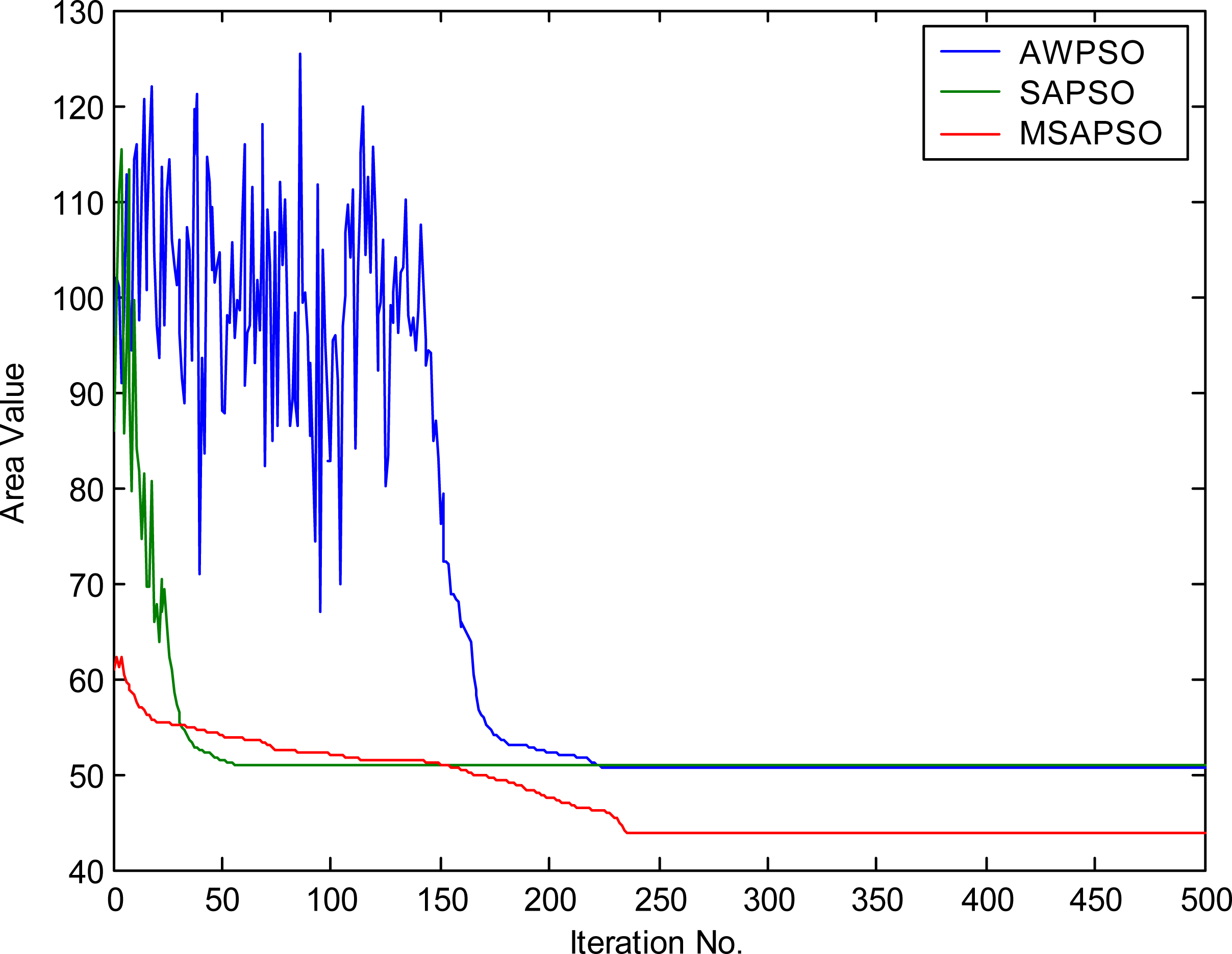
Comparative wire length performance in Lattice filter with population size 50.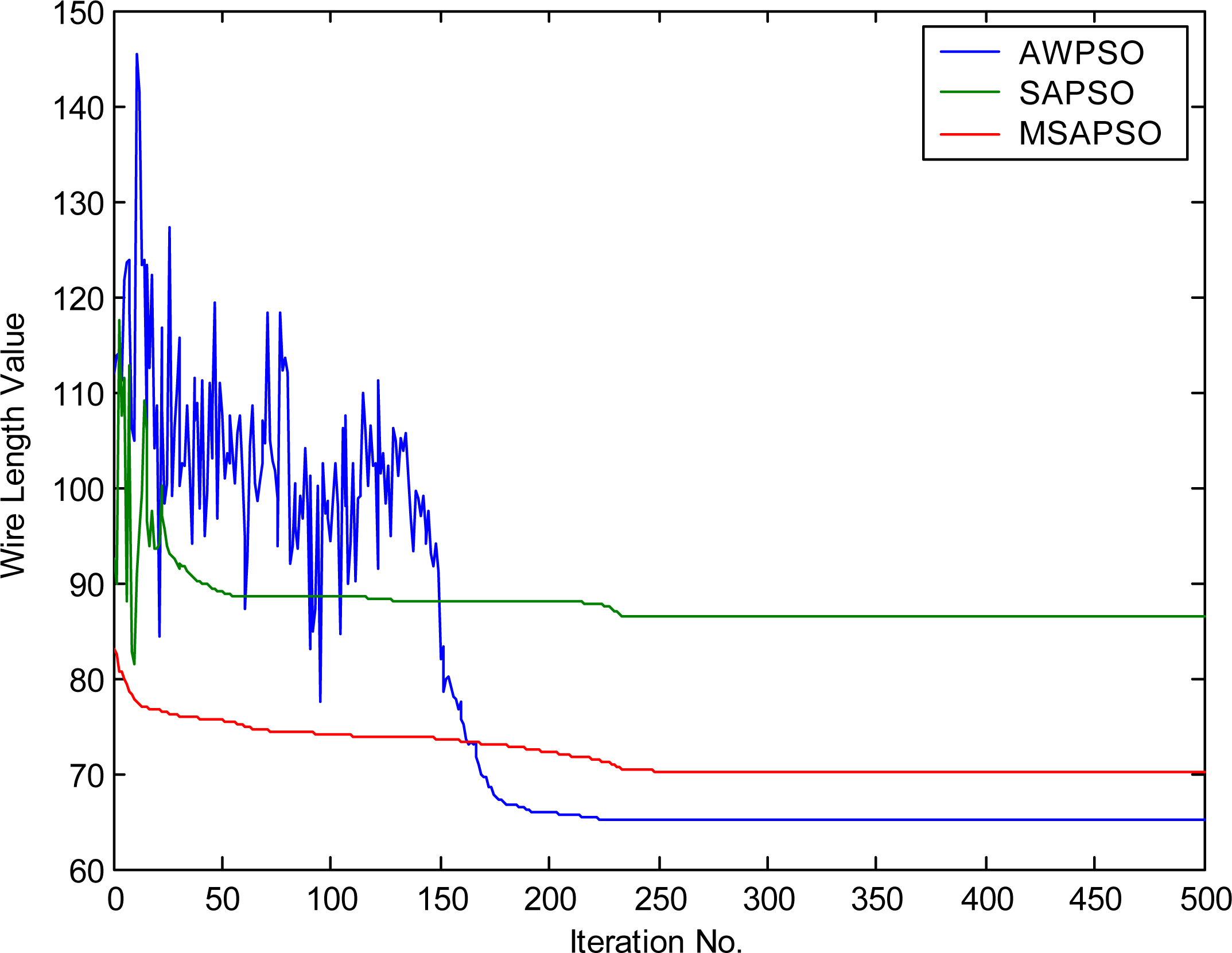
Floorplan for Lattice filter using MASPSO with population size equal to 100.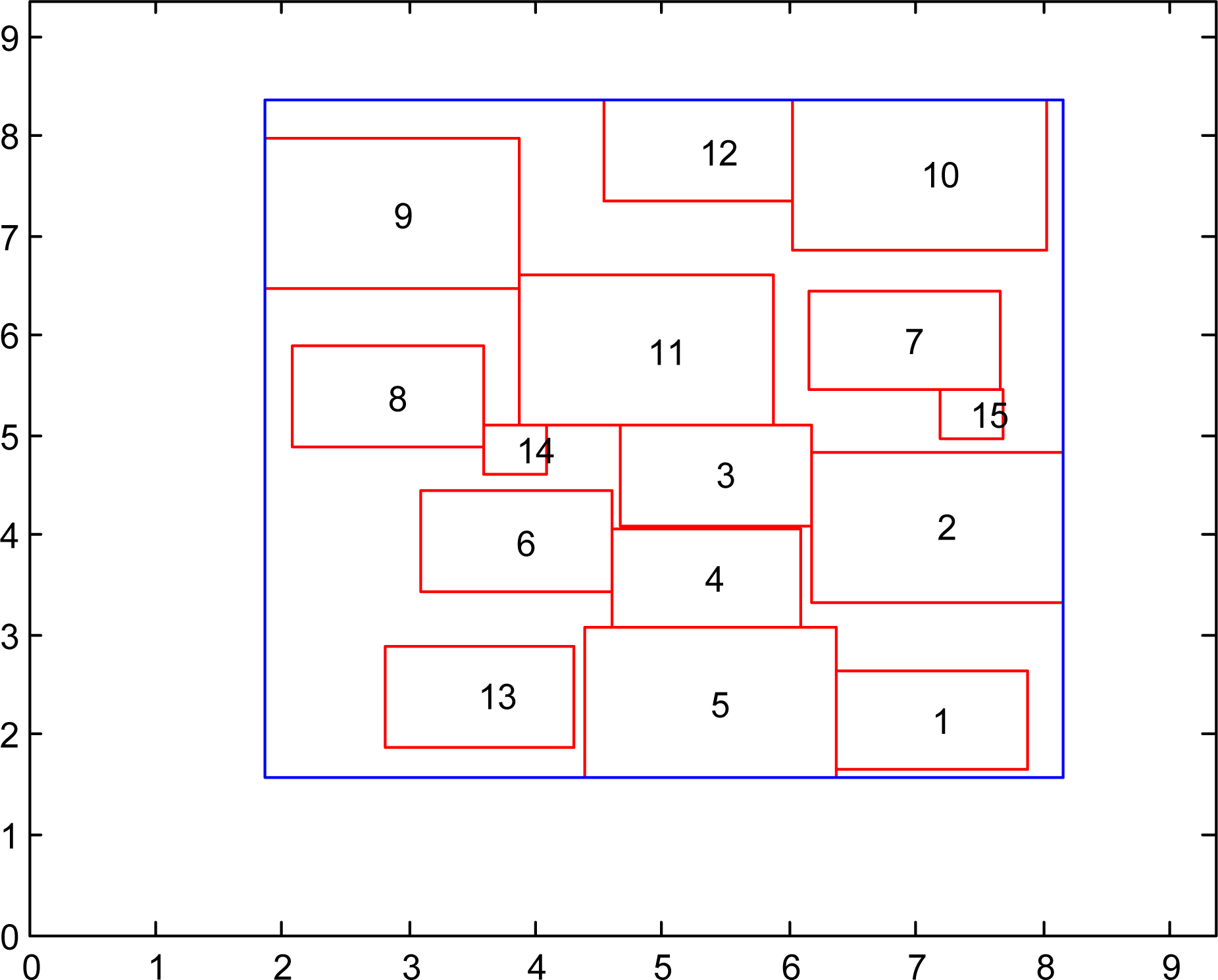
Let the superscripts indicate the iteration number, and subsequently the individual is evolved according to the Eqs (3) and (4).
where,
The performance of PSO is highly dependent upon the value of parameters chosen. However, there is no way potential to calculate the optimal values for these parameters. Therefore, an optimal option is to develop the adaptive environment thus that according to requirement it can opt the suitable value.
In this paper, a multi-culture concept called “multi-culture self-adaptive particle swarm optimization (MSAPSO)” is applied to evolve the individual population independently and later exploit to form a better community to search the solution space efficiently. This approach is inspired very much by present human society, where at fundamental level two things happen (i) the independent existence of a number of separate population, and they get their progress under the same environment up to a certain period of time. (ii) with respect to objectives, a number of individuals are selected from the different population and form a new population to achieve the objectives. For instance, the recruitment of employees by a company from various places, as well as the selection of the political leader in the democratic country. Similar way rather than working under monoculture formed by one population as in conventional PSO, multiculture environment has proposed, where a number of different environments created by a different set of population independently. Each population has evolved socially independently to generate the multiculture and later among all best individuals is selected to finish the task. This is a dual stage process where first stage finds some potential solution discovered from different regions of solution space, and later in the second phase, each individual contributes more efficiently to find a global solution. In this paper proposed MSAPSO has followed the same concept to solve the problem of floorplanning. With proposed method better quality solution achieved along with the very high value of consistency not only that, require the small size of the population.
Diversity and inertia weight in MSAPSO with population size equal to 100.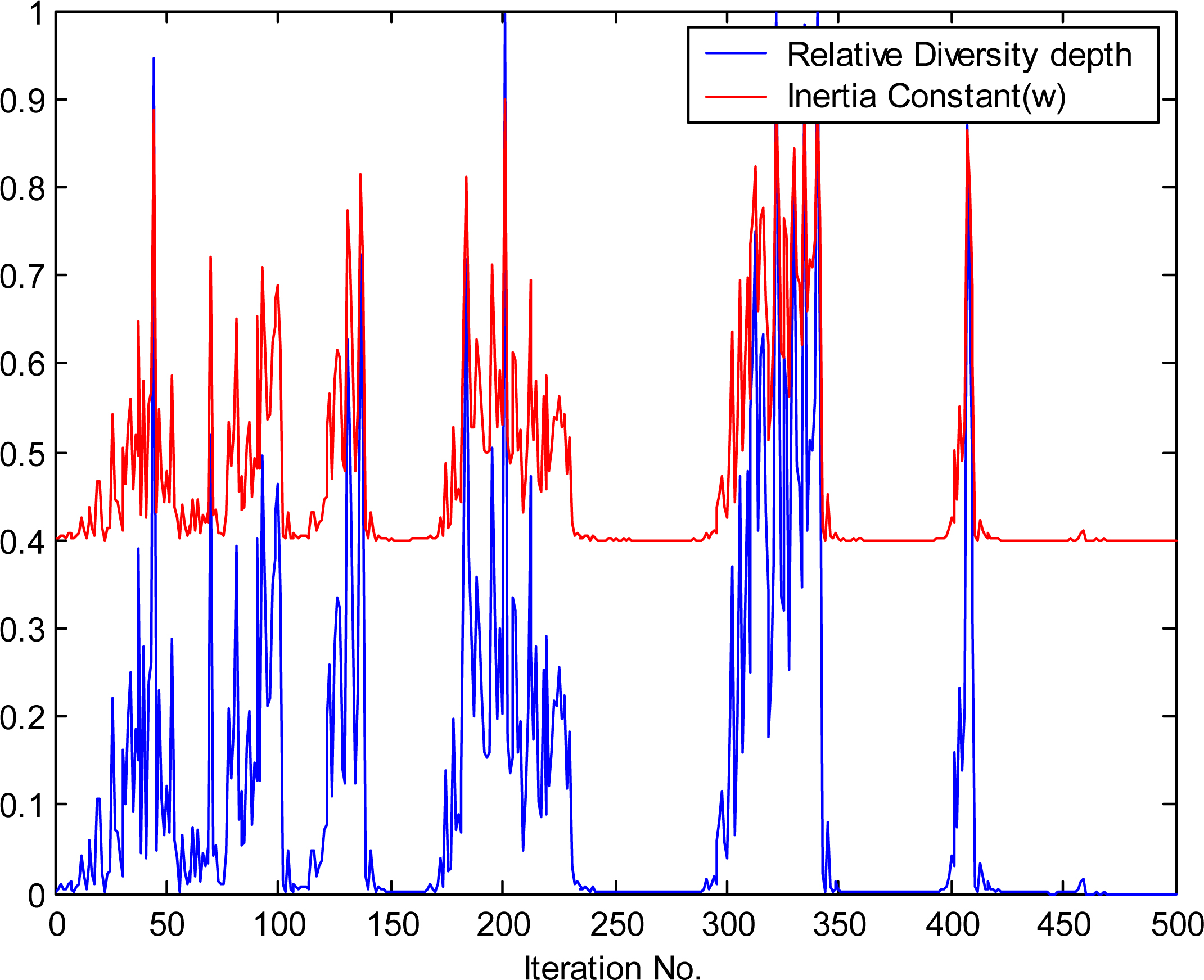
Floorplan for Lattice filter using SAPSO with population size equal to 100.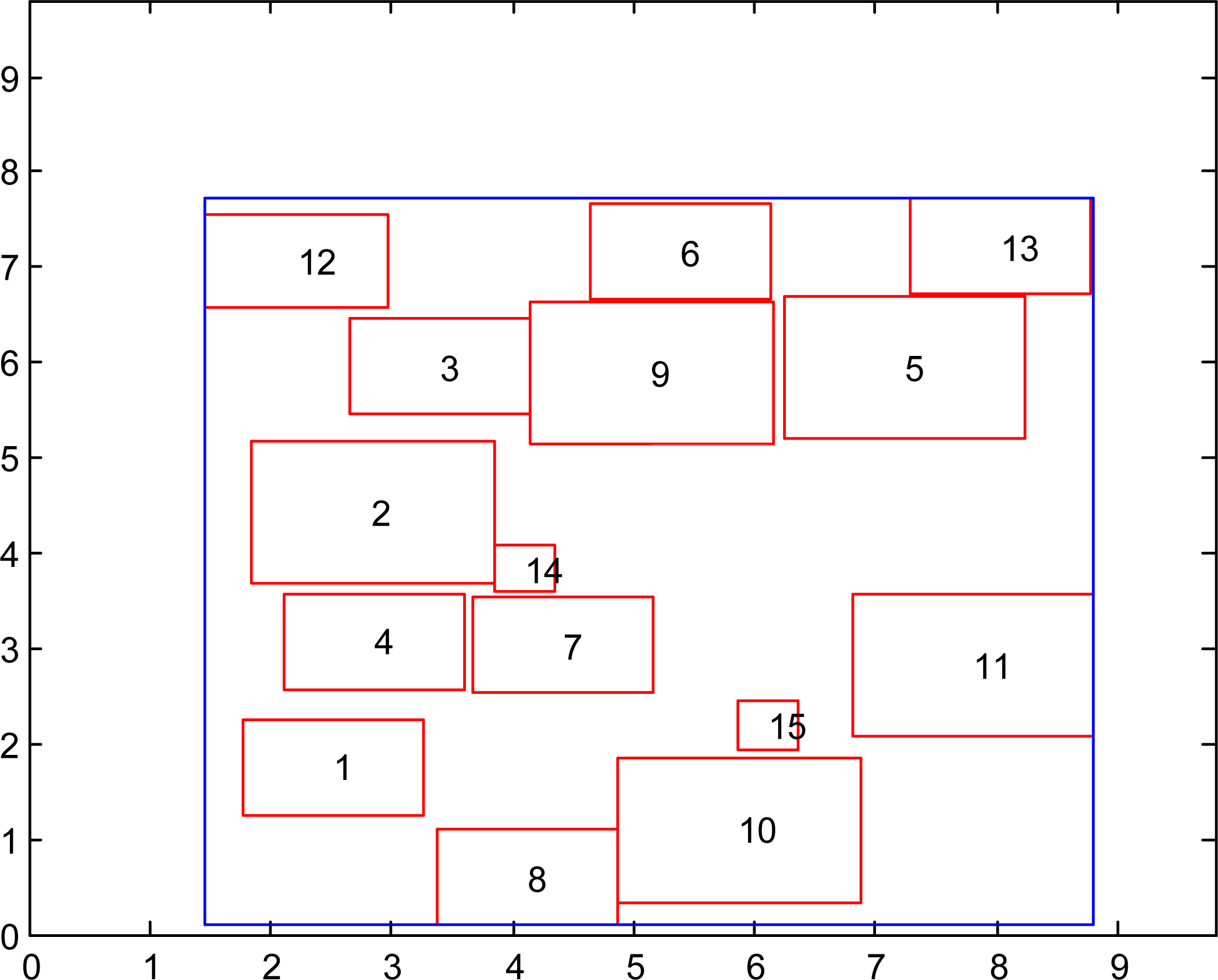
Diversity and inertia weight in SAPSO with population size equal to 100.
Floorplan for Lattice filter using AWPSO with population size equal to 100.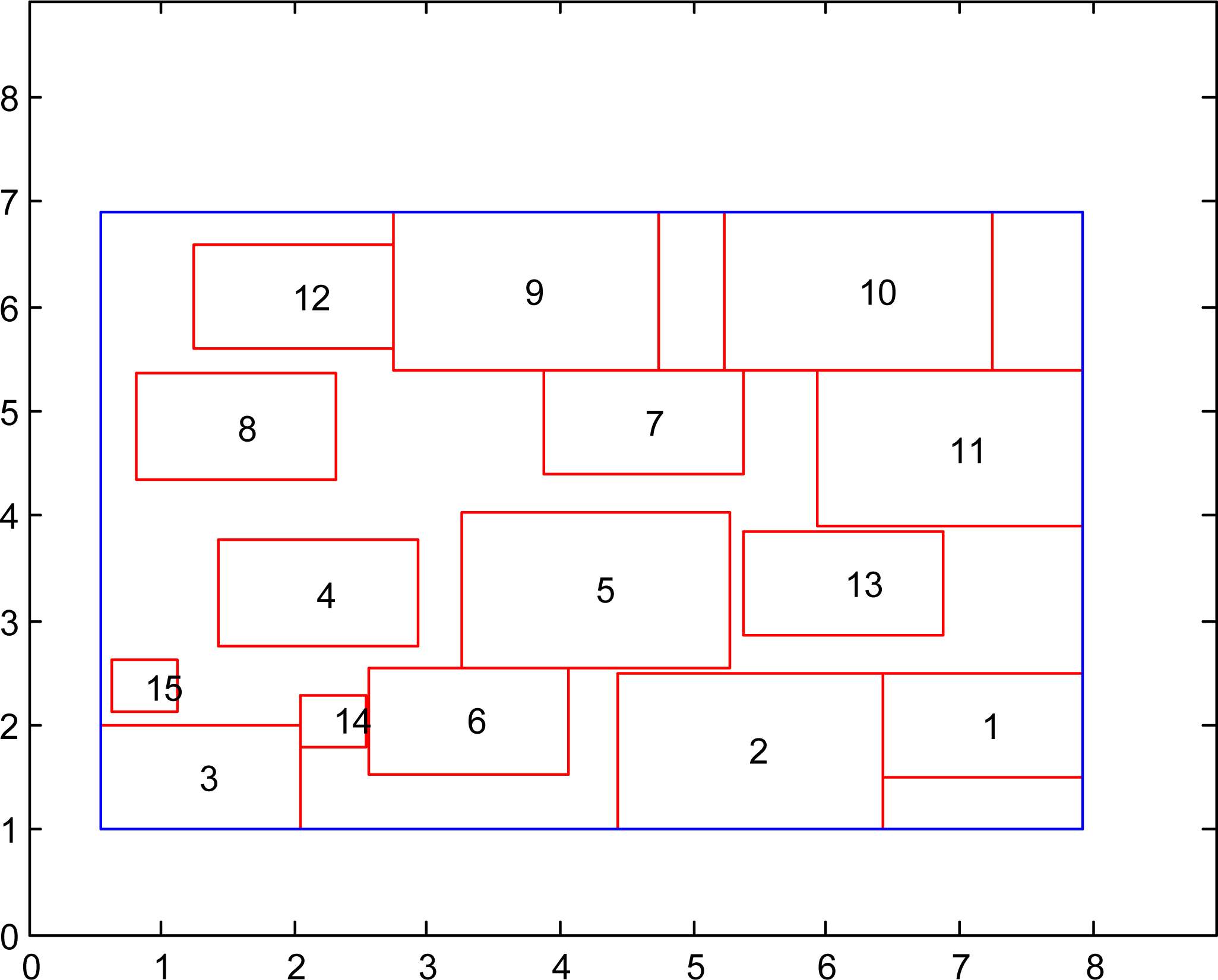
Diversity and inertia weight in AWPSO with population size equal to 100.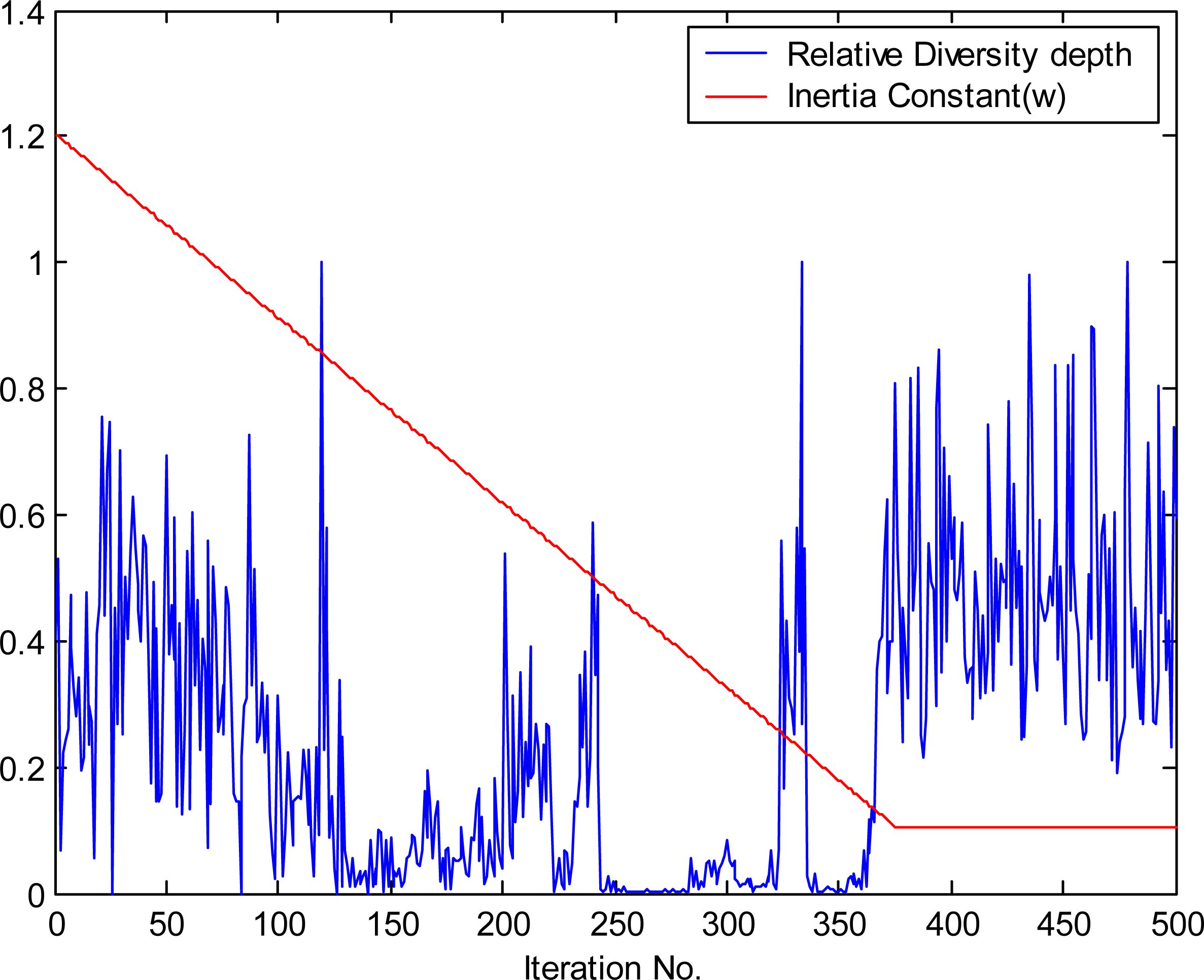
Comparative area performance in Lattice filter with population size 100.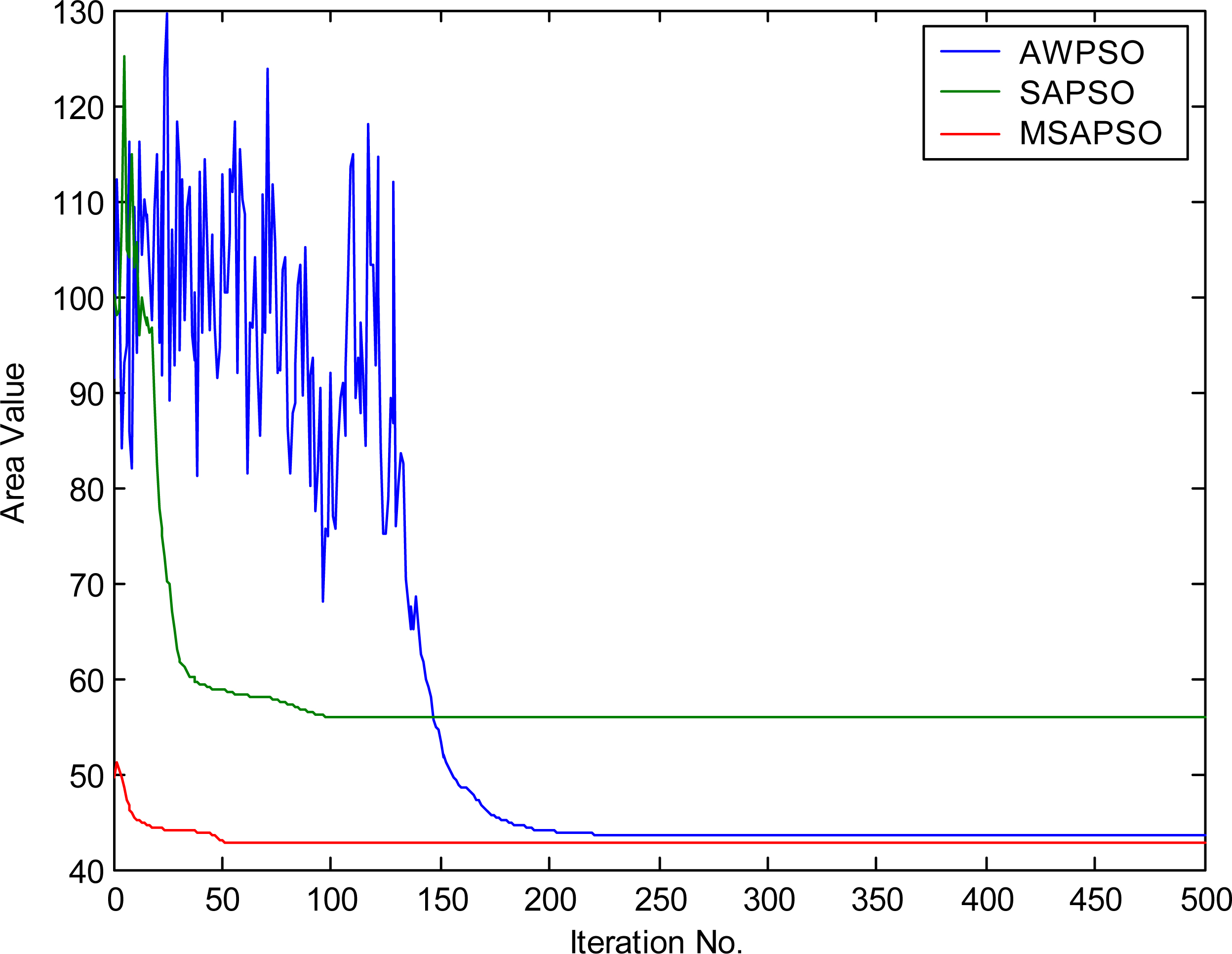
The working principle of MSAPSO has shown in Fig. 3. Here ‘POP’s’ are the initial random population, which is evolved by the SADPSO process individually and independently for a fewer number of iterations (say 50) and create the multi-culture new population (NPOP). Even though the process of creating the NPOP is same for all POP, because of difference in leadership and different community surrounding, each NPOP has different characteristics. Through the fitness-based selection process, among all members from all NPOP, better members are selected to form a new population SPOP, which has the same size as POP has. In SPOP, there are a number of good candidates, which do not only have higher fitness but also are different, hence the high level of diversity exists. Finally, over SPOP, SAPSO has applied till terminating criteria does not meet. Hence, the Final Population (FPOP) is attained.
Generally, the memetic algorithms are represented as a population-based meta-heuristics method. An evolutionary framework is composed and a set of local search algorithms that are activated within the generation cycle of the external framework. Hence, the proposed MSAPSO approach is entirely different from the memetic algorithm.
The working principle of MSAPSO is computed on the basis of Eq. (5):
where,
where,
Comparative wire length performance in Lattice filter with population size 100.
In all natural computing method, representation of solution in the population is very important and can be deciding factor for success or failure of outcomes. In this paper, left corner co-ordinates value of block position is considered to represent the individual block as shown in Table 3. In result, the dimension of the problem is equal to the twice number of modules involved.
Comparison of multi-culture PSO with other variants
The major benefits of the PSO algorithm are simple, robustness to control parameters, easy implementation, as well as computational effectiveness while compared with other heuristic optimization algorithms. However, it suffers from major drawbacks such as in high-dimensional space, easy to fall into local optimum as well as rate in the iterative process, it has a low convergence. Similarly, in AWPSO the premature convergence is the reason of not having optimally adaptiveness in inertia weight, and monoculture environment is the reason for the remarkable difference in the performance with different time execution in independent trials. In the design of the SAPSO algorithm, a number of independent trials must be given to defining the final quality of performances statistically. High level of performance inconsistency imposes a serious limitation on the practical use, and it has become an issue of those problems where time and accuracy are prime important. Increasing the population size can help to solve this problem a very little and also imposes a computational issue. In order to deal with these problems, MSAPSO are exploited. Here, a number of different environments are created by a diverse set of population independently. In subsequent section, the detail description of the AWPSO and SAPSO are presented.
Adaptive weight PSO (AWPSO)
The high value of the inertia weight in the beginning and lower value at a later stage is considered as better strategies to maintain the balance between global and local exploration. Hence a Linear decreasing value for ‘
where
Diversity available in the population is very important from an exploration point of view. If there is information available about present diversity in the population, associated parameters involved in exploration can assign more optimal value. In PSO, ‘
On the basis of Eq. (8), a self-adaptive provision has proposed for inertia weight, according to diversity status of solution population.
where
where, mean
By Eq. (10), Mean Euclidean distance is calculated
In Eq. (11), the cognitive and social constant also has to change as population moves one state to another.
Depends upon the value of
Embryo stage [0.8 Exploration state [0.5 Exploitation state [0.2 Convergence state [0
For the different circuit, the experiment was done to define the corresponding floorplanning. For each one of the three methods, there are three different population size contains, 20, 50 and 100 numbers of the solution have applied independently. To estimate the more accurate performance statistically, 10 different trials have given to each case and various statistical characteristics, including “confidence interval (CI)” for 95% and 99% estimated. In each trial, 500 number of iterations permitted to evolve the solution. For AWPSO, inertia weight change linearly from 1.2 to 0.1, and C1 and C2 both are taken equal to 2. For MSAPSO, in the first stage, there is total 10 independent population, and each population has evolved for 50 iterations. In second stage best members are selected and evolved up to 500 iterations. MATLAB computing environment has taken to develop and execute the solution.
Test case1: 3rd order IIR filter
The “Infinite Impulse Response (IIR)” filters are basic elements of “Digital Signal Processing (DSP)”. Moreover, the IIR filters are digital filters with the infinite impulse response. Here, the impulse response is “infinite” since there is feedback in the filter. Third order IIR filter as demonstrated in Fig. 4 has taken for the first experimental case; whose modules dimension and their connectivity definition have presented in Table 2.
Performance evaluation of different algorithms with population size 20
In this section, the performance evaluation of proposed and conventional algorithms over IIR filters with population size 20. Here, the evaluation has been done for both the floorplanned Area and the wirelength.
For a population size of 20, all the three algorithms performances for 10 independent trials have shown in Table 4. AWPSO could not converge properly and violate the non-overlapping constraint for 6 trials, as shown with ‘*’. SAPSO has performed comparatively better, and in only one trial, it could not converge properly. Performance of MSAPSO is properly converged for all the cases, not only that obtained statistical parameters are also appealing as shown in Tables 5 and 6. In Table 5, the proposed method is 0.5% better than the conventional SAPSO approach and 5.5% better than the conventional AWPSO approach. Similarly, the proposed approach is 28% better than the conventional SAPSO approach and 0.5% better than the conventional AWPSO approach, and the result is shown in Table 6.
Obtained floorplan using MSAPSO and SAPSO have shown in Figs 5 and 6. It is observed that there is a dead space. This happens because diversity has lost and there is not enough exploration takes place in both algorithms. The level of diversity can be increased with a higher value of population size.
Performance evaluation of different algorithms with population size 50
In this section, the performance evaluation of various algorithms has been presented. Here, the experimentation is performed over the IIR filter with population size 50 for both the floorplanned Area and the wire length.
To understand the effect of population size, the experiment was repeated with population size equal to 50 and 100. There is clear benefit appeared as shown in Tables 7 and 8 and observe that MSAPSO has delivered the better performances. Table 8 summarizes the proposed method is 48% better than the SAPSO method and 23% better than the AWPSO method. Table 9 summarizes the proposed MSAPSO method is 23% better than the SAPSO method and 25% better than the AWPSO method.
From the analysis of Figs 7 to 9, it is clear that there is a reduction in dead zone observed in comparing to dead zone appeared with a population size of 20. Comparative convergence characteristics for the area and wirelength have shown in Figs 10 and 11. In both cases, there is more fluctuation at the beginning of AWPSO, while the performance of MSAPSO in the second stage is very smooth.
Performance evaluation of different algorithms with population size 100
The performance evaluation of the proposed and conventional method is presented. Here, the algorithm is compared with population size 100 for both the floorplanned wirelength and area.
If population size has increased up to 100, there is a huge dead zone reduction achieved withMPSAPSO, in comparison to other algorithms as shown in Tables 10 to 12 and their corresponding floorplan appeared in Figs 12, 15 and 17. Variation in Inertia weight is also observed. Table 11 explains that the proposed method is 14% and 45% better than the SAPSO and AWPSO methods. In Table 12, the proposed method is 43% better than the SAPSO and 68% better than the AWPSO.
In Figs 13 and 14, in the beginning, there is a higher value of diversity hence larger value of “
Comparative performances for the area and wirelength convergence characteristics also have shown in Figs 18 and 19. It is observed that MASPSO has shown more stability in comparison to others.
Test case 2: Lattice filter
The Lattice filter is exploited in extensively in DSP as well as in implementing the adaptive filters.
Another very useful circuit lattice filter as shown in Fig. 20 has taken for the second experiment. Modules size definition and their connectivity have given in Tables 12 and 13.
Performance analyses of different algorithms with population size 20
In this section, the performance analysis of the proposed and conventional algorithms with population size 20 is presented. Here, the comparison is performed for floorplanned Area and wirelength.
Table 15 states that the proposed method is 70% better than the conventional SAPSO method and 57% better than the AWPSO method. Table 16 summarizes that the proposed method is 62% better than the conventional SAPSO method and 42% better than the AWPSO method.
Performance analyses of different algorithms with population size 50
The performance analysis of the proposed and conventional algorithms with population size 50 for Lattice filter is presented. Here, the analysis for both the Floorplanning ara and wirelength is performed.
Table 18 summarizes that the proposed method is 32% better than the SAPSO and 11% better than the AWPSO method. Table 19 explians that the proposed method is 10% better than the SAPSO and 0.79% better than the AWPSO method.
Performance analyses of different algorithms with population size 100
The performance analysis of the proposed and conventional algorithms with population size 100 for Lattice filter is performed.
In Table 21, the proposed method is 20% and 54% better than the conventional SAPSO and AWPSO method. Table 22 summarizes that the proposed method is 7.3% better than the SAPSO method and 33% better than the AWPSO method.
For the lattice filter, the experiment was repeated for three different populations, and their performances have shown in Tables 13 to 21, and obtained floorplan along with their convergence characteristics are available in Figs 21 to 39. In all cases, MSAPSO outperformed the other form of adaptiveness.
Conclusion
The problem of floorplanning in VLSI is a critical and very challenging task. In this research, a new variant of PSO, which is based on adaptiveness as according to diversity available in population as well as to increase the diversity, multiculture concept has applied to solve the non-slice type of floorplanning. There is a remarkable performance obtained by MSAPSO in all cases, including with low value of population size. The proposed method has delivered the high level of consistency along with high efficiency in compactness of floorplanning. Two very important circuits, IIR filter, and lattice filter have examined in details and their comparative performances obtained. From the results of the proposed method, it is clearly stated that the time taken for convergence is less for proposed method than the conventional GA used [1, 2, 10]. However, the local search is difficult for the Tabu search method used [5], but the proposed method overcomes this drawback. For finding global maxima, the conventional GA used [26, 27] is not guaranteed. The Simulated Annealing used [23] required branch and bound, yet the proposed method does not require. The proposed method does not easily fall into local optimum but the conventional PSO method used [15, 16] easily fall into a local optimum.
Footnotes
Acknowledgments
This research has completed in EDA division of Manuro Tech Research Pvt. Ltd. Bangalore, India. Authors would like to appreciate the associates for their valuable discussion and suggestions.
Authors’ Bios