
Abstract
This paper addresses the problem of ecological ocean pollution by using semi-autonomous unmanned vehicles. A hybrid approach for unmanned vehicles cooperation (HA-UVC) is presented for unmanned aerial vehicles (UAV) to monitor ocean regions and clean up their dirty areas with a swarm of unmanned surface vehicles (USV). Thus, the proposed HA-UVC addresses the problem of trajectory planning, where unmanned vehicles must find a trajectory from the starting position to the goal position while avoiding static obstacles. Consequently, two solutions are proposed in order to manage the trajectory planning problem for the semi-autonomous USV Swarm. The first solution is performed by a modified genetic algorithm (GA). However, the second one is achieved by a proposed Cartesian coordinate algorithm (CCA). In order to optimize the applicable performance, the proposed solutions make it possible to detect and reduce the level of pollution in ocean regions, while avoiding obstacles and failures of unmanned vehicles.
Keywords
Introduction
Marine pollution is defined as the direct or indirect introduction of wastes, substances, or energy. Basically, it includes underwater sound sources of human origin, that causes or is likely to cause adverse and undesirable effects on living resources and marine ecosystems. It negatively touches and disturbs bio diversity, risks to human health, obstacles to maritime activities such as: fishing and tourism, recreation and other uses of the sea, an alteration of water quality from the point of view of their use, and a reduction in the amenity value of the marine environment.
The pollution of the oceans, particularly that of coastal waters, is due to terrestrial as well as marine activities. Fertilizers and pesticides are used in agricultural operations, industrial and nuclear waste, exhaust gases emitted in streets and on roads, sewage and garbage, spread into rivers and streams, that end up in the ocean. Releases to the atmosphere either by industry, or transport is another important source of pollution from the land. Once emitted, many chemical compounds (copper, nickel, mercury, cadmium, lead, zinc, etc.) remain in the air for weeks, see more. It is mainly through the winds that they travel and fall back into the oceans. All these pollutants and waste are then redistributed around the world by the marine currents. Marine activities such as: mining, transportation, fishing, and cruise ships discharge large quantities of toxic substances into the ocean. Noise pollution, which strongly disrupts the behavior of certain animal species such as large marine mammals, is also a growing problem. Oil pollution, which is caused by the stranding and collisions between ships, which has been a major international problem for long time. In this term, the oil spill is a good example of this pollution, which results in the flow of oil slicks into the coastal zone. This slick, which results from the deliberate or accidental release of a significant amount of crude oil or heavy petroleum products into the sea, is then brought back to the coast by tides, winds, or currents.
While looking at the frequency and quantities of oil spilt, it should be noted that a few large spills are responsible for a high percentage of the oil spilt. For example, in the recent decades can be seen in the 1990s, in which there were 358 spills of 7 ton and over, resulted in 1,134,000 ton of oil lost; 73% of this amount was spilt in just 10 incidents. In the ninth year period 2010–2018, there have been 59 spills of 7 tones and over, resulted in 163,000 ton of oil lost; 92% of this amount was spilt in just 10 incidents. One incident is responsible for about 70% of the quantity of oil spilt in this decade. In terms of the volume of oil spilt, the figures of a particular year may be severely distorted by a single large incident. This is clearly illustrated by incidents such as: Atlantic Empress (1979), 287,000 ton spilt; Castillo De Bellver (1983), 252,000 ton spilt; Abt Summer (1991), 260,000 ton spilt; and Sanchi (2018), 113,000 ton spilt (see Fig. 1) [10].
Location of major spills [10].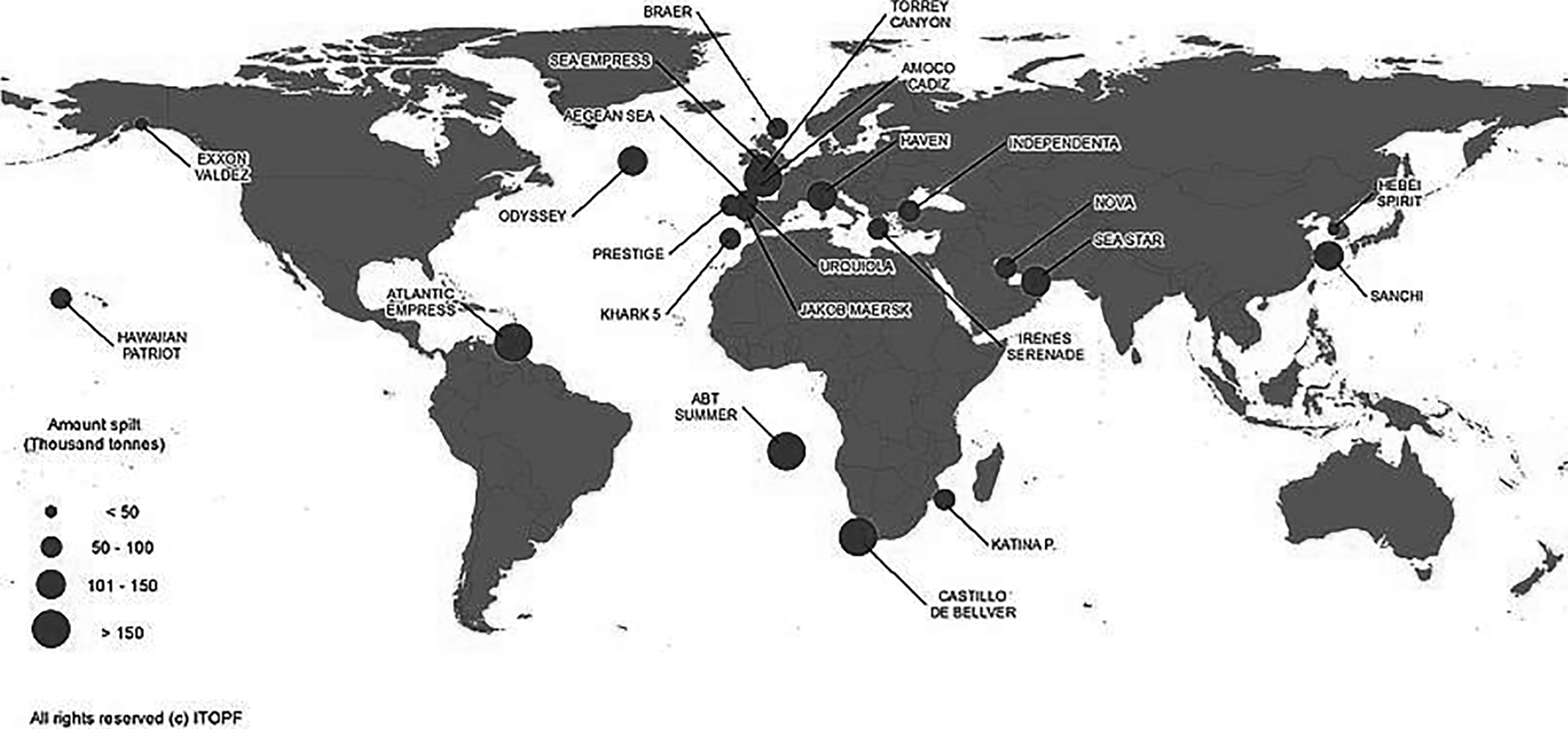
The fight against this pollution is very difficult to be implemented and no ‘ultimate’ solution exists up to date. As a result, industry sectors have been encouraged to develop an unmanned vehicle, or drone solution to protect marine environments and help the human being. A ‘Bio-Cleaner’ drone design was designed to clean the oceans of oil slicks [12]. By the use of this drone, a solution based on swarms of semi-autonomous unmanned vehicles is proposed to clean up the oil slicks of a coast of the city of Oran, Algeria (oil port). The oil slicks illustrated in black, are positioned between the maritime region of the ‘anastel Forest’ and the beach ‘The dunes’ as shown in Fig. 2.
Oil slicks at ORAN (Western Algeria, Source: Google Maps).
Fundamentally, the interest of this work is to present a hybrid approach that can successfully allow an easy management between the different unmanned vehicles. Moreover, this architecture allows fault tolerance and scalability compared to the self-organized approach [18] that does not allow or hardly allows scalability with increased complexity for efficient management of its entities [19]. Centralized management includes a central node with deterministic decision-making capability and easy to implement coordination. This coordinator has a global view of the unmanned vehicle activities of its appropriate system. These unmanned vehicles are: surveillance vehicles and swarms of cleaning vehicles. They cooperate with each other to carry out a mission of monitoring the ocean regions, cleaning up their dirty zones, and follow the requests of its coordinator. Distributed management begins when the surveillance vehicle is assigned to a region. The surveillance vehicle has a lower decision than that of its coordinator. It has the ability to coordinate its own cleaning swarms to properly accomplish the cleansing mission. These swarms plan their movements to go to the dirty zones from their bases of life. In this context, two solutions are proposed to the problem of trajectory planning. Furthermore, these solutions are based on two algorithms, ‘Modified Genetic Algorithm (GA)’ and ‘Proposed Cartesian Coordinate Algorithm (CCA)’. Besides, these algorithms propose a calculation method avoiding obstacles calculation method that quickly provides a workable solution to the planning problem. Several trajectories will be generated and the best will be selected for the cleaning vehicle swarm according to each proposed solution. As this cleaning vehicle is a mechanical, electronic, and computer system which may at some point fail at the hardware/software level while performing its tasks, a solution is proposed to allow the selection and replacement of failed cleaning vehicles by the competent cleaning vehicles during the realization of the cleaning mission.
This present paper proposes a hierarchical hybrid approach for heterogeneous unmanned vehicles cooperation (HA-UVC). The HA-UVC includes various and effective methods to manage the trajectory planning and fault tolerance problem for the unmanned surface vehicle (USV) swarm. Moreover, the proposed HA-UVC permits a cooperation of an unmanned aerial vehicle (UAV) to monitor an oceanic region and a USV swarms to clean dirty ocean zones. The UAV is assumed to be equipped with on-board sensors that allow it to locate dirty zones by using the proposed movement methods. UAV discretizes its environment map and updates it with the collected information related to dirty zones. UAV sends its environment map to its general coordinator (represented by a laptop and guided by a human operator). After an analysis of the collected data, the general coordinator assigns the explored map to the USV swarm to clean each dirty zone. This swarm navigates to the assigned dirty zone and cleans it based on the proposed solutions for trajectory planning. The first solution is based on the modified GA, whereas the second one relies on a proposed CCA. Also, these solutions incorporate a method to avoid static obstacles during the movement of a USV swarm. In addition, the proposed HA-UVC is complemented by a failure managing method of a USV during the execution of its cleaning task.
The paper is organized as the following: Section 2 presents some related works in the literature; Section 3 describes the proposed HA-UVC for the different unmanned vehicles with the trajectory planning and failure managing method, and model them by logical formalization; Section 4 illustrates an example to simulate the operation of HA-UVC; in Section 5, the proposed HA-UVC is compared to the related works; finally, Section 6 concludes this paper and provides some future research directions.
The occurrence of natural disasters is an important problem in all world’s regions, either developed, or developing.The problem arises from the physical extent of the disaster, which makes it out of scope of human possibilities to react to it. Accordingly, efforts are being made to recognize and predict the possibility of a disaster, especially to respond effectively to the ongoing disaster, and to assess and repair the damage as quickly as possible. Several efforts are based on the use of different unmanned vehicles in several applications, namely, environmental monitoring applications, disaster prediction, cleaning, mapping, etc. For example, the work of [7] described a vision of leveraging the latest advances in UAV and wireless sensor (WSN) network technology to enhance the ability of network-assisted disaster prediction, assessment, and response. UAV networks in conjunction with WSN and cellular network are showed to be a promising future technology for the applications in a disaster management.
Thus [1], the authors proposed a model system and a performance evaluation of UAVs to map an affected area during a Japan Tohoku of Tsunami disaster in 2011. The city of Sendai in Japan has been mapped using a multi-heterogeneous UAV. The flight plan designs are based on the information recorded after the disaster and on the mapping capabilities of the UAVs. The numerical and statistical results of the mapping missions were validated by executing the missions on real-time flight experiments in a hardware-in-the-loop simulator (HITL) that developed and analysed the flight logs of the UAVs. Multi-rotor UAVs are suitable for monitoring small urban areas because their complexity and manoeuvrability enable obstacles avoidance in these areas. The flooded and remote areas should be monitored by fixed-wing UAVs because they have longer flight times than multi-rotor UAVs.
Additionally, the work of [2] addressed the problem of monitoring the pollution of unknown ocean regions, the detection, cleaning of dirty zones, and the breakdown of unmanned autonomous vehicles. The authors proposed a centralized decision-making approach for air-sea cooperation and coordination, which is composed of a UAV to monitor an oceanic region and an USV in order to clean up a dirty zone. The color has been chosen as a degree of dirt, so that UAV can detect the dirty zones and initiate the cleaning. The geo-referenced images of UAV are collected through using its sensory sensors to create an exploration map of the region with a path a priori known and determine the positions of dirty zones. UAV sends the explored map and dirty zone data to the general coordinator (represented by an artificial agent). After an analysis of the captured data, the USV uses its sensors and the map provided by UAV via the general coordinator to access the assigned dirty zone and clean it. Each USV has the LEDs to measure the amount of energy. Mainly, the measured metrics are the total energy consumption, the average cleaning energy consumption, and the number of cells cleaned by the selected USV.
Furthermore, in terms of cleaning vehicles, a Waste Hunter Surface cleaning robot [6] was developed for rivers that allows real-time monitoring of water cleanliness. Waste Hunter Surface is a tele-operated robotwith three main functions: surface cleaning, purification process, and water quality monitoring.In addition, the robot is a semi-automatic control robot, where it will be turned on and off. It can also make a movement from the input gain of the user. This robot has a flexible design, which is built by several functions on the mobile application, namely: wireless controllers (WIFI) to communicate between the user and the robot, a smart phone application for the remote control, a Nodemcu microcontroller module for the interface between the user and the robot, a virtual gauge for data quality monitoring (PH value), etc. An automation system is put in place to monitor the water cleanliness 24/7. Also, it can trap the physical waste that flows there. During the test, Waste Hunter Surface is examined with four movement conditions, namely: forward, backward, left, and right movement. The result shows that the robot was able to reach the desired location in minimum wind conditions. However, Waste Hunter Surface is difficult to clean in an open environment with strong water comparing the clam water environment.
Furthermore, a prototype [19, 21] of a USV based on two gas sensors was developed to locate the gas source of an oil spill in the sea. The gas concentration received by the two sensors, applied to a fuzzy logic controller, determines the rate at which each propeller motor approaches the gas target. The result shows that the USV prototype is able to approach and locate the target with average accuracy obtained when searching for the location of the gas source of 90.1%. Thus, a new robotic system swarm [19, 22] was proposed to locate and pick up an oil spill on the surface of the water (ocean, river, lake). A coordinator determines the position and the center of the spill using a GPS receiver, then a barge carrying the robots moves to the workplace. Depending on the state of the spill, the coordinator can send a swarm of robots to surround and collect the oil spill, then place the barge with oil suction equipment and move it to another location to remove the oil more safely. This new system saves money and time.
On the other hand, the heterogeneous unmanned vehicles must plan their displacements to accomplish a given mission based on several approaches and methods of trajectory planning. A synthesis was proposed in the article [11], which systematically examined optimal approaches to trajectory planning adopted for a single or a USV swarm. Initially, the optimal approaches for trajectory planning currently adopted in the literature for unique USVs are analysed with the ‘reactive obstacle avoidance (ROA)’, ‘deliberative obstacle avoidance (DOA)’ and ‘simultaneous localization and mapping (SLAM)’ techniques in two aspects: the static and dynamic environment. This is followed by path planning approaches adopted for swarm of USVs. Among these approaches, an evolutionary approach to the path planning of coverage region (PPCR) was presented in [15]. This approach is based on a genetic algorithm (GA) for a vacuum cleaner robot, where GA is used to generate an efficient path to clean all accessible areas in the room environment. In the proposed model, the map is built on a disk shape, which represents the robot position that is connected to each other with only local lateral connections. The model works in real time and in a dynamic environment. GA consists of several steps to get the solutions. Each gene represents the robot position and some of the chromosomes also represent the mini-path. The authors demonstrated the effectiveness and robustness of this algorithm to help the robot navigate a zigzag path in the entire work space by avoiding obstacles using different sensors. The simulations are implemented in C #. The simulations prove advantages in reducing the length of the trajectory, the number of turns, and the cells, which are revisited for the GA compared to the other ‘scan matching’ algorithms and combined with ‘oriented rectilinear decomposition (ORD)’ and ‘spatial cell diffusion (SCD)’.
Another genetic algorithm [3] was proposed for the trajectory planning problem to handle the problem of fault tolerance for USV swarms while performing their tasks. They proposed a hybrid approach that represents a cooperation of a semi-autonomous UAV and a semi-autonomous USV swarm and their coordination by a general coordinator. A UAV is assigned to a region and a swarm of USV is allocated to a dirty zone for cleaning. The color is chosen as the degree of dirt, so that UAV can detect dirty zones with its on-board sensors. UAV discretizes its environment card and updates it with the collected information about dirty zones. Also, it sends its environment card to its general coordinator (represented by a laptop, guided by a human operator). After an analysis of the data collected, the general coordinator assigns the scanned map to the swarm. This swarm plans its movement via the proposed GA to reach its dirty zone. Each swarm of USV measures its amount of energy by a threshold of energy, and then sends its information to its leader. This latter sends back information to its supervisor to make the decision to find a free USV, and to replace USV in unloaded state. The measured metrics are the average total energy consumption of the USV swarm and the average total energy consumption of the selected USV.
Besides, the authors in [4] presented a GA for autonomous mobile robots, where GA is used to find a sequence of actions that robots must perform to reach the goal as quickly as possible. A coding based on specific actions has been tested in a realistic robotic simulator. In the proposed approach, the robot did not know in advance the disposition of the environment and only had a rough estimate of starting positions and goal. At first, a set of actions is generated randomly. The robots execute these actions, and then their aptitude is evaluated. The fitness function is based on the distance travelled and the Euclidean distance from the goal. Individuals are selected by tournament to reproduce. Then, a new sequence of actions is generated by applying crossover and mutation operators. However, the evolution continues only for the sequence of actions related to the robots that did not reach the goal.GA has a higher average performance than that proposed by the algorithms A* and its improvement (C*), and the smallest distances travelled by the solutions returned by GA are always better than the solutions returned by A* and C*.
Thus, a multi-domain inversion strategy based on the ‘conventional genetic algorithm (CGA)’ to solve the trajectory planning problem was presented in [14]. This strategy increases the number of offspring in order to improve a local search capability and to increase the probability of generating excellent individuals. Monte Carlo simulations for several examples from the library for the travelling salesman problem were conducted to analyse the feasibility and effectiveness of the improved algorithms. These improved algorithms, namely, ‘Single-Domain Inversion-based Genetic (SDGA)’, ‘Multi-Domain Inversion-based Genetic Algorithm (MDIGA)’, and ‘Double-Domain Inversion-based Genetic Algorithm (DDGA)’, have been applied to the navigation, guidance, and control system of an USV in a real maritime environment. A comparative study reveals that MDIGA algorithm is superior with a desirable balance between path length and time cost, and it has a shorter optimal path, a faster convergence speed, and a higher robustness than the others.
Furthermore, a new method of trajectory planning for mobile robots in an uncertain dynamic environment was presented by [16]. Through this method, the positions of the moving obstacles are sampled by the robot sensor system, and the sampling position information on dynamic obstacles is treated as instantly static. Moreover, with the current sampling positions, an autoregressive (AR) model predicts the future positions of the obstacles in the next sampling period. Then, the trajectory of the robot is planned with such predicted positions. With the integration of global planning and local planning, an online real-time approach has been based on polar coordination which the desirable steering angle is taken into account as an optimization index. Unlike the different traditional methods of trajectory planning, this approach does not concern the length of the robot’s movement, but the direction in which it moves.
Thus, a new state feedback based back stepping control algorithm to solve the trajectory tracking problem of an under actuated USV in the horizontal plane was proposed in [5]. The well-known Persistent Exciting (PE) conditions of yaw velocity is completely relaxed for tracking control of both the curve and straight line trajectories of USV with high accuracy. This controller is designed on the basis of the overall system and the overall stability, and it is proved by Lyapunov Theory and Barbalat’s Lemma. In order to verify and illustrate the performance of the proposed control schemes for the tracking of the under-actuated USVs, computer simulations were performed on a USV model with hydrodynamic parameters, which are derived from the hydrodynamic calculation based on the FLUENT software.
Principally, an offline 3D path planner for a single UAV in a real space of uncertain mission is introduced in [17]. A new coordinate system is used to remedy the drawbacks of two coordinate systems by rotating the Cartesian coordinate system and dividing the whole mission space into several subspaces, which heavily reduces the search space. Based on this new coordinate system, an estimation of the distribution algorithms (EDA) is used to build a new path planner for UAV. This EDA is introduced for saving the fine-tuning time of reproductive parameters and guide the search for optimal waypoint in each subspace. The results have showed the effectiveness of this new proposed path planner.
This article deals with the marine pollution problem by proposing a cooperative hybrid approach (HA-UVC). This proposed HA-UVC allows cooperation between the heterogeneous semi-autonomous air-sea vehicles that is presented to monitor ocean regions and clean dirty zones. Thus, two solutions are proposed to find an optimal trajectory and avoid static obstacles between the starting position of an unmanned cleaning vehicles (USV) swarm and the objective. The first solution is based on a modified GA, and the second is relies on a proposed CCA. This trajectory planning between the base of life and the dirty zone is made from the metric map of an oceanic region. This map is built by an unmanned surveillance vehicle (UAV). Eventually, a fault tolerance service is introduced for USV swarms.
Proposed cooperative hybrid approach and formulation
This paper presents a HA-UVC based on the cooperation and the coordination of unmanned vehicles. This cooperation minimizes the work overload by breaking down the mission into tasks. These tasks are allocated or distributed on the various unmanned vehicles based on air-sea coordination. This coordination facilitates and reduces the execution, competition and conflicts of these tasks between the different unmanned vehicles. Thus, the approach proposed in the article Bella et al. [3, 19] is developed by describing the architecture and the constituent entities of the system, the solutions proposed for trajectory planning, and fault tolerance as well as their operation. In addition, a logical formalization is defined to broadly encompass the steps used in this HA-UVC and to illustrate them in a formal way based on a representation of classical planning.
Proposed cooperative hybrid approach
Architecture of the system
The hybrid architecture of the proposed system, shown in Fig. 3, consists of a central unit, surveillance vehicle to monitor maritime region, swarms of cleaning vehicles to clean dirty zones, and recovery vehicles are presented to recover defective vehicles. The central unit is composed of a general coordinator, a base of life and a database. The general coordinator stores and consults the data in the database. It interacts with the base of life and the surveillance vehicle via a communication link of the IEEE.802.11a standard (5000 m outside range) of the name Wi-Fi 5. While the Wi-Fi network of the IEEE.802.11b standard (35 m–140 m indoor range). Also, it allows messages to be connected between the surveillance vehicle and the swarm of cleaning vehicles.
Hybrid architecture of the system.
The decision-making hierarchy of the proposed approach, illustrated in Fig. 3, is made up at the first level of a general coordinator. It represents the central memory which has the highest decision for the execution of various tasks like the launching and controlling of the unmanned vehicles used that are located in the base of life, the use (processing) and storage of data in the database. The monitoring drone is loaded of a lower decision in a second level. It represents a central memory that has the role to supervise and monitor its cleaning vehicles swarms. These swarms are located in the third level and are composed of leaders’ vehicles with their followers. Their objective is to carry out the cleaning operation of the dirty zone according to the energy availability of each member. Each leader can represent a central memory of its followers. It has two necessary roles; it is responsible for the tasks/characteristics of it followers, and also, it shares (cooperates) with them the cleaning action. Finally, each USV in the swarm has a local memory building the fourth level, and they can communicate with each other. The coordinator launches a recovery vehicle to recover the failing vehicles.
Descriptive table of the different vehicles
Descriptive table of the different vehicles
This section defines the modeling of this work environment. It is described by the set of components listed below and the parameters used (Table 3).
Set of tasks: Five high level tasks are defined and used by the general coordinator, the monitoring and cleaning vehicles: task of allocating (
Descriptive table of the different vehicles: Table 1 lists the different vehicles used in this HA-UVC with their tasks.
Descriptive table of the different agents: Table 2 shows the different types of agents with their names and roles.
Set of regions: The monitored maritime space is divided into maritime regions. The region is composed of two sub-spaces; an atmosphere sub-space where
Set of base of life: It is a zone (can be a boat, ship, or an island) to store a fixed number of
Set of database: These are basics for storing and saving all the data and features of the maritime space as well as the different unmanned vehicles used.
Set of dirty zones: With water pollution, for example oil slicks or plastic waste; the proposed metric in this work is the degrees of dirt for each zone with four types: strong dirt, average-strong dirt, average dirt, and low dirt. Each zone is characterized by a list ‘
Set of obstacles: They represent obstacles that float on the surface of the water such as ships, boats, marine mammals like dolphin and whale, birds, fish, excessive growth of sea plants, natural scum, etc. The position of these obstacles ‘
Descriptive table of defined agents
Descriptive table of defined agents
Descriptive table of used parameters
This section describes the key steps of HA-UVC with proposed solutions for the trajectory planning problem and the fault tolerance problems. To this end, the HA-UVC is based on two essential steps: monitoring and cleaning. The proposed solutions are applied in the cleaning step. To better understand the proposed HA-UVC, a pseudo code of the complete procedure and the structure (flowchart) of this approach are illustrated in Algorithm 1 and Fig. 4 respectively.
Structure of the hybrid approach for unmanned vehicles cooperation (HA-UVC).
Step 1: Monitoring
This step presents the monitoring actions performed by each
Phase 1. Monitoring setup: the monitoring step is performed, for example, twice a week in the maritime region to be monitored. The
Phase 2. Monitoring execution: this phase is executed when the
Unmanned aerial vehicle (UAV) movements to achieve.
Step 2: Cleaning
This step is illustrated the cleaning actions in three phases: the cleaning setup, operation and the cleaning finalization.
Phase 1. Cleaning setup: two proposed solutions for trajectory planning are applied in this phase. The first solution is based on a modified GA, and the second is used by a proposed CCA. In addition, they guide the swarm of
Detection and avoidance of the obstacle for the
Detection and avoidance of the obstacle.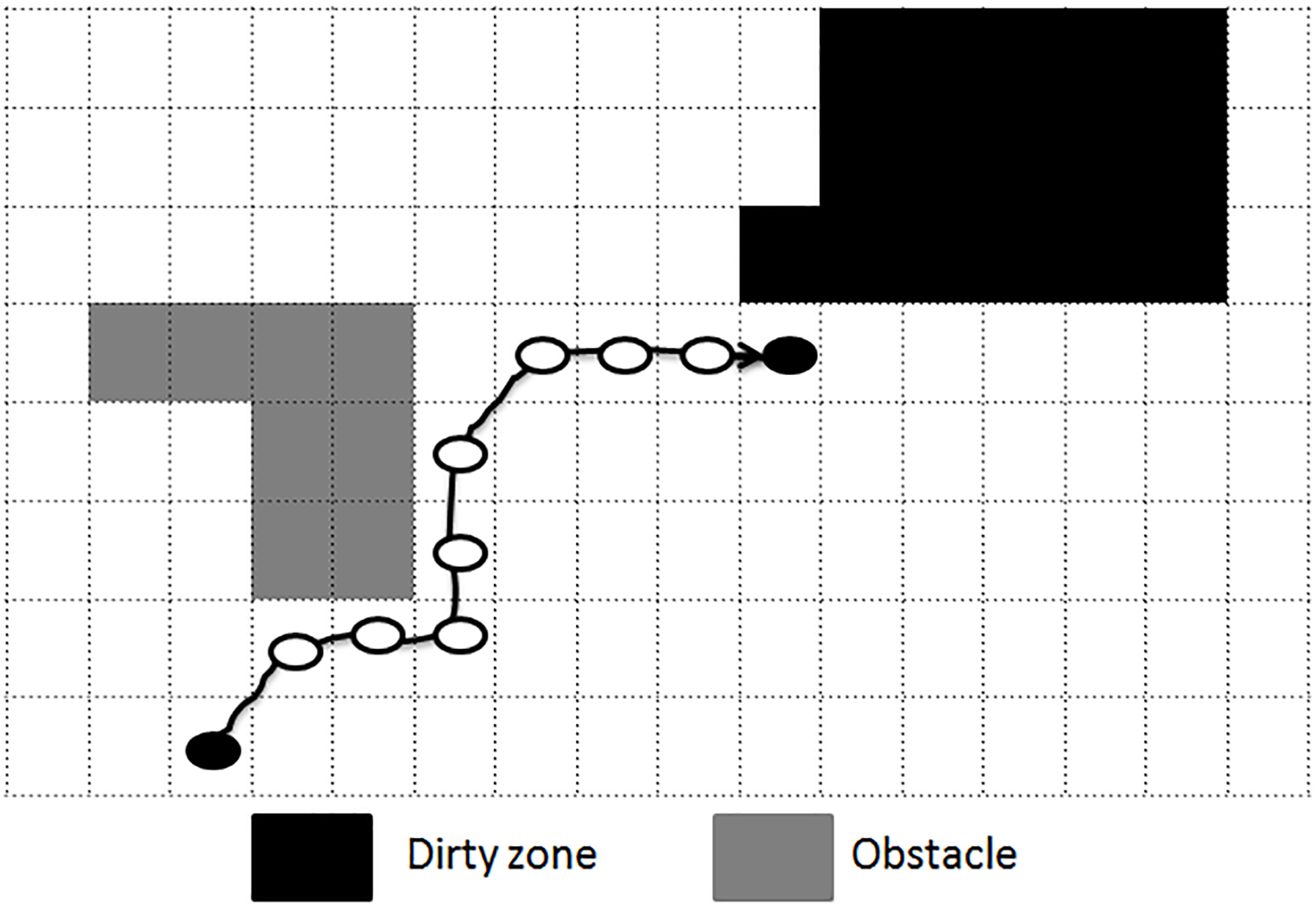
Solution 1. Modified GA trajectory planning: This phase is presented as the first solution modified to the trajectory planning problem. The different actions of this solution are mentioned so that the selected
Genetic algorithm setup: the modified GA is inspired by the algorithm presented in [3, 15, 19]. In this GA, the
Environment modeling, the environment modeling depends on the map of the discretized region (metric map) by the supervisor
Environment modeling of modified GA.
Trajectory planning method, General
Trajectory planning method.
The range of the sensor represents a detection region Rs of s * s boxes that allows
Evolutionary approach, an evolutionary approach based on GA is proposed to minimize the energy consumption, obstacle and trajectory distance. GA helps the
Encoding and representation, each node has its own number after the environment modeling is finished. The gene is made of one part which represents these nodes. In the trajectory planning of the region, the gene corresponds to a position of
Gene presentation.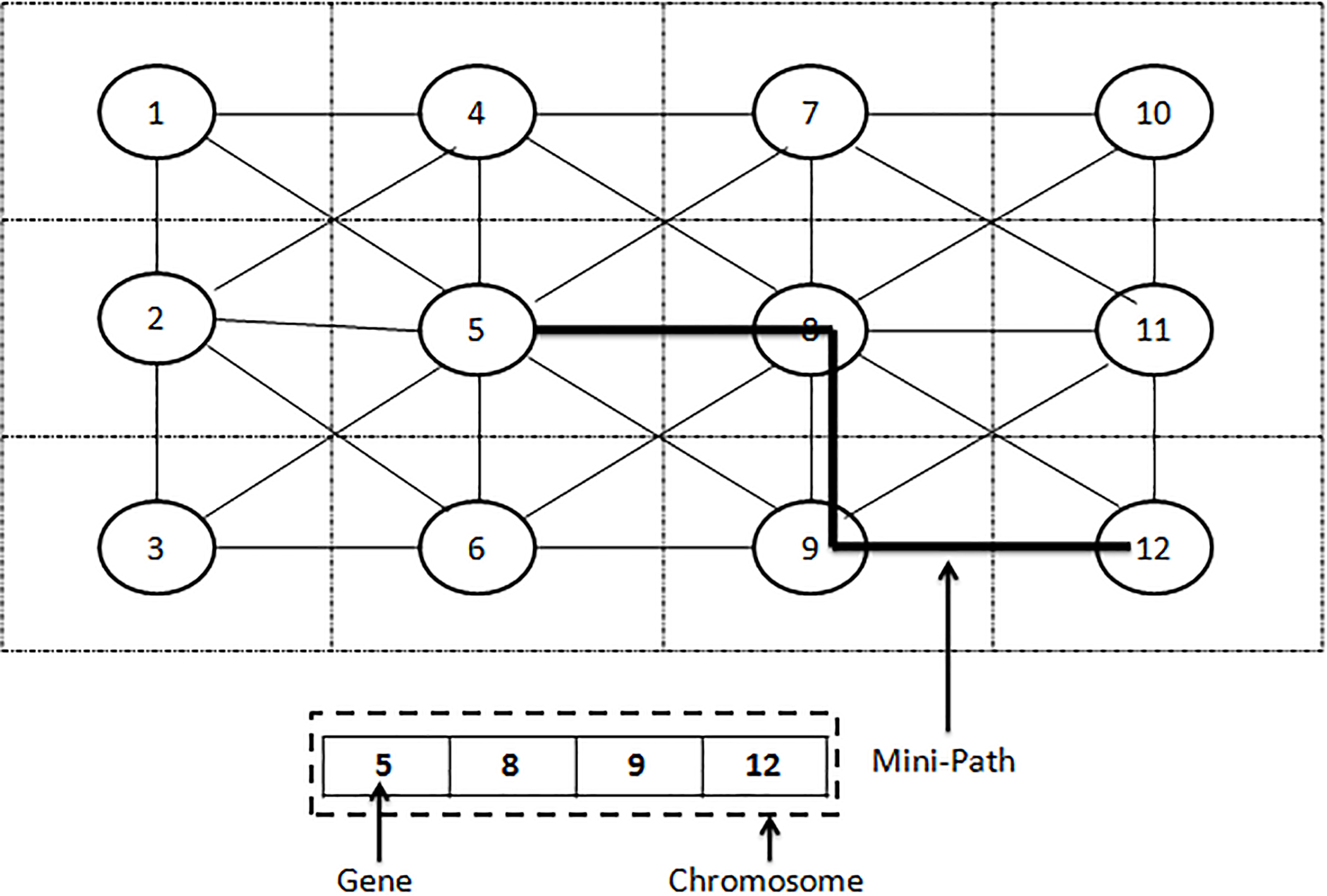
Generation of initial population, the population has a fixed length of p individuals and each individual has a sequence of initial positions of length l. The positions represent the cell-nodes that the
Two ways of motion.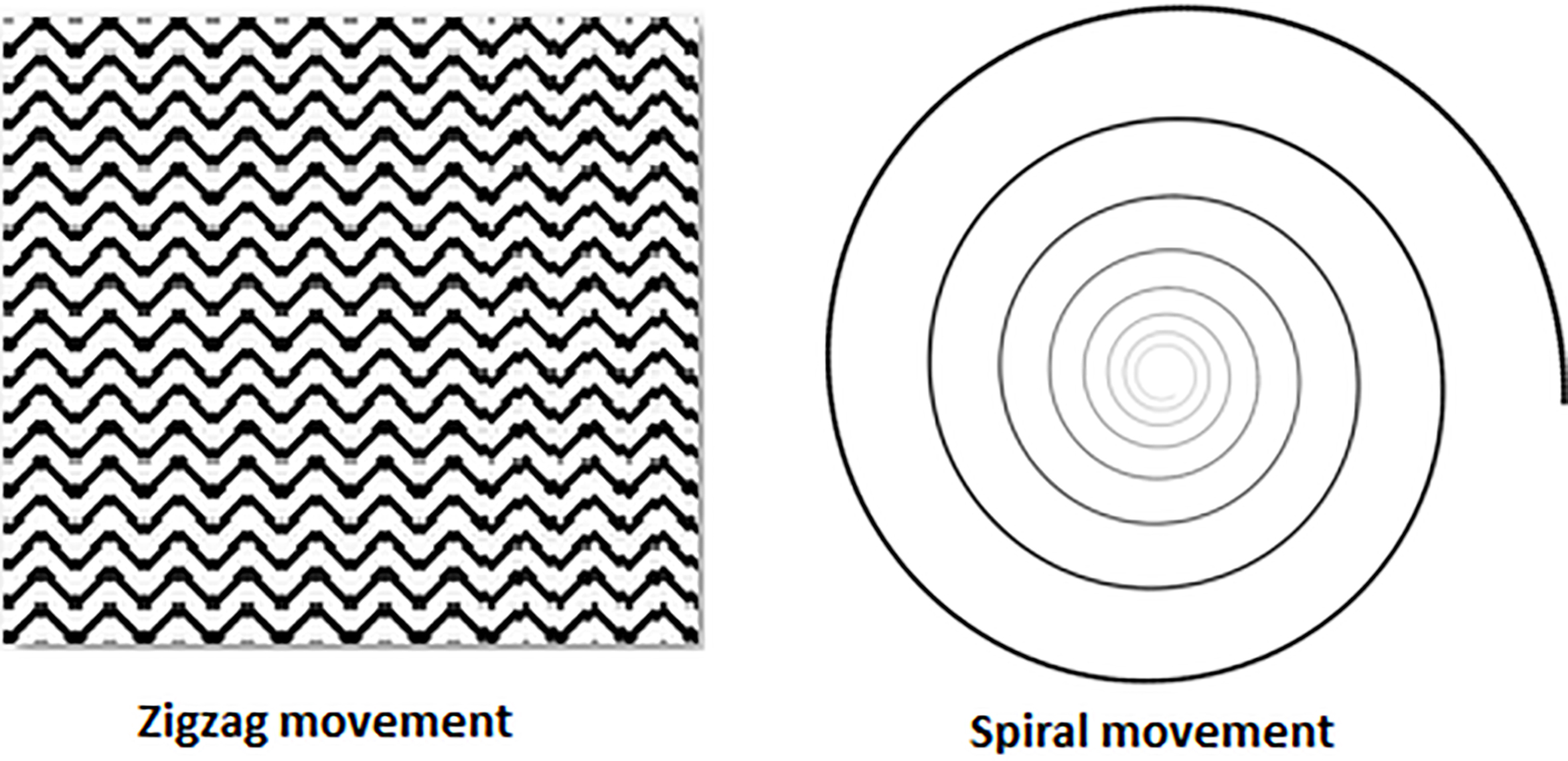
Fitness function and selection, fitness function is necessary to know the details of description and solution of the problem. It is directly related to the constraints of navigation coverage, i.e. the energy reduction, the obstacle and the trajectory size. Two parameters are taken into consideration to evaluate the fitness of the mini-trajectories: the total distance of mini-trajectory, the direction cost for
where two equilibrium parameters (constant numbers) and
Genetic operators, the new position sequences (new individuals) are created by applying crossover and mutation operators. Crossover is performed positions sequence provided by two parents. These parents (two mini-trajectories) are selected by tournament [20], where they (the individuals) are chosen at random and who with a low fitness value becomes a parent. One-point crossover technique was chosen for this approach; the two children are then added to the population. An example of a crossover operator is shown in Fig. 11. In which, the crossover point is the first three genes of two trajectories selected (parents) by the tournament. Then, the child 1 takes the first part of the parent 1 chromosomes plus the second part of the parent 2 from the crossover point. Thus, the child 2 takes the first part of parent 2 and the second part of parent 1. Therefore, two new mini-trajectories are provided.
Crossover operator.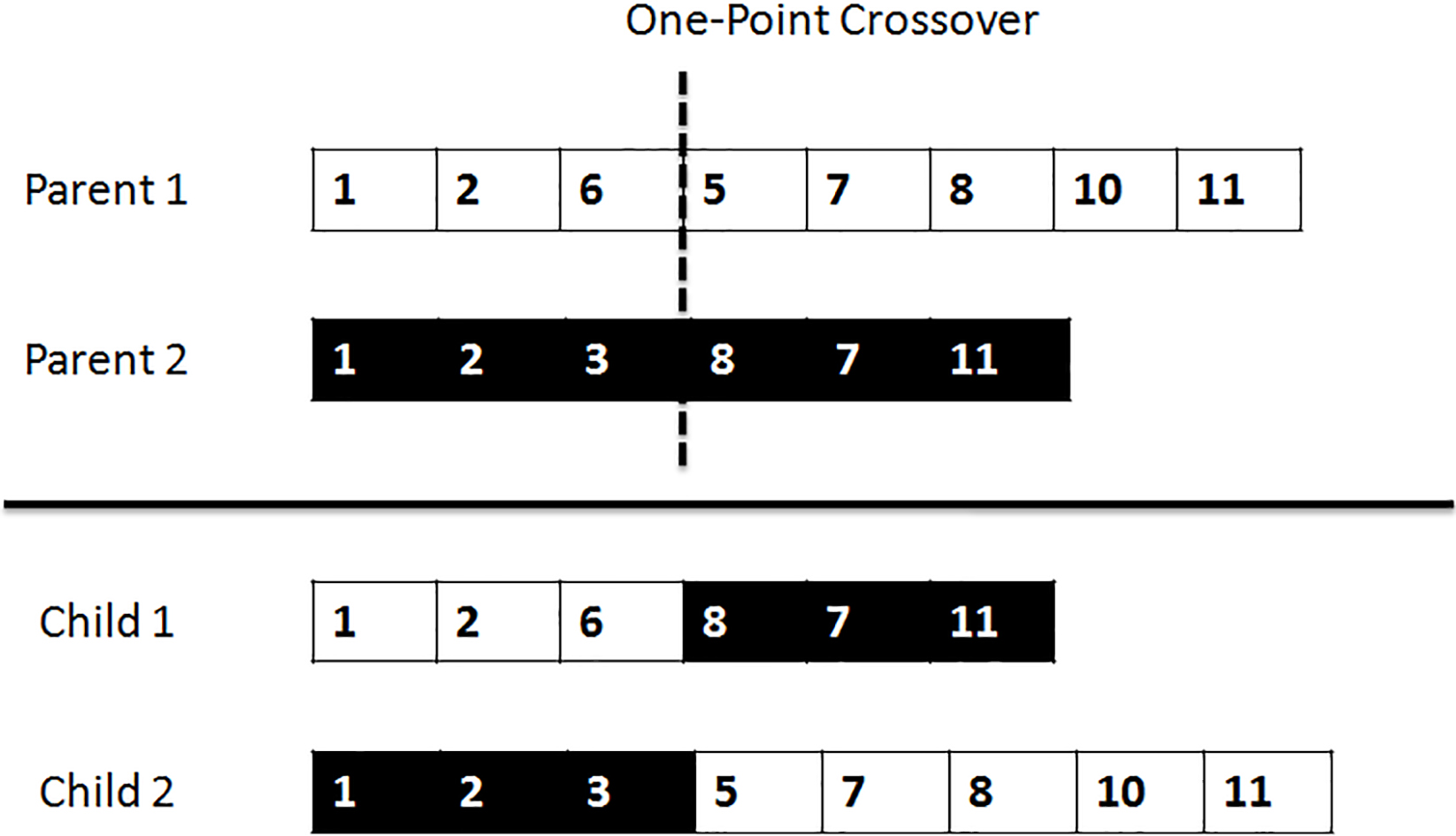
The mutation randomly defines a quantity of genes that is randomly chosen to be mutated. In this case, the gene that builds a problem in the trajectory. It is replaced by one’s neighbor’s previous neighbor gene in the trajectory. The neighboring gene is also randomly selected. Figure 12 shows the mutation operation on child 1 of the previous example. At each generation, applied elitism can be created by new individuals (children) of length l who have a low fitness to replace previous individuals (parents). Each new position sequence is executed by an associated
Mutation operator.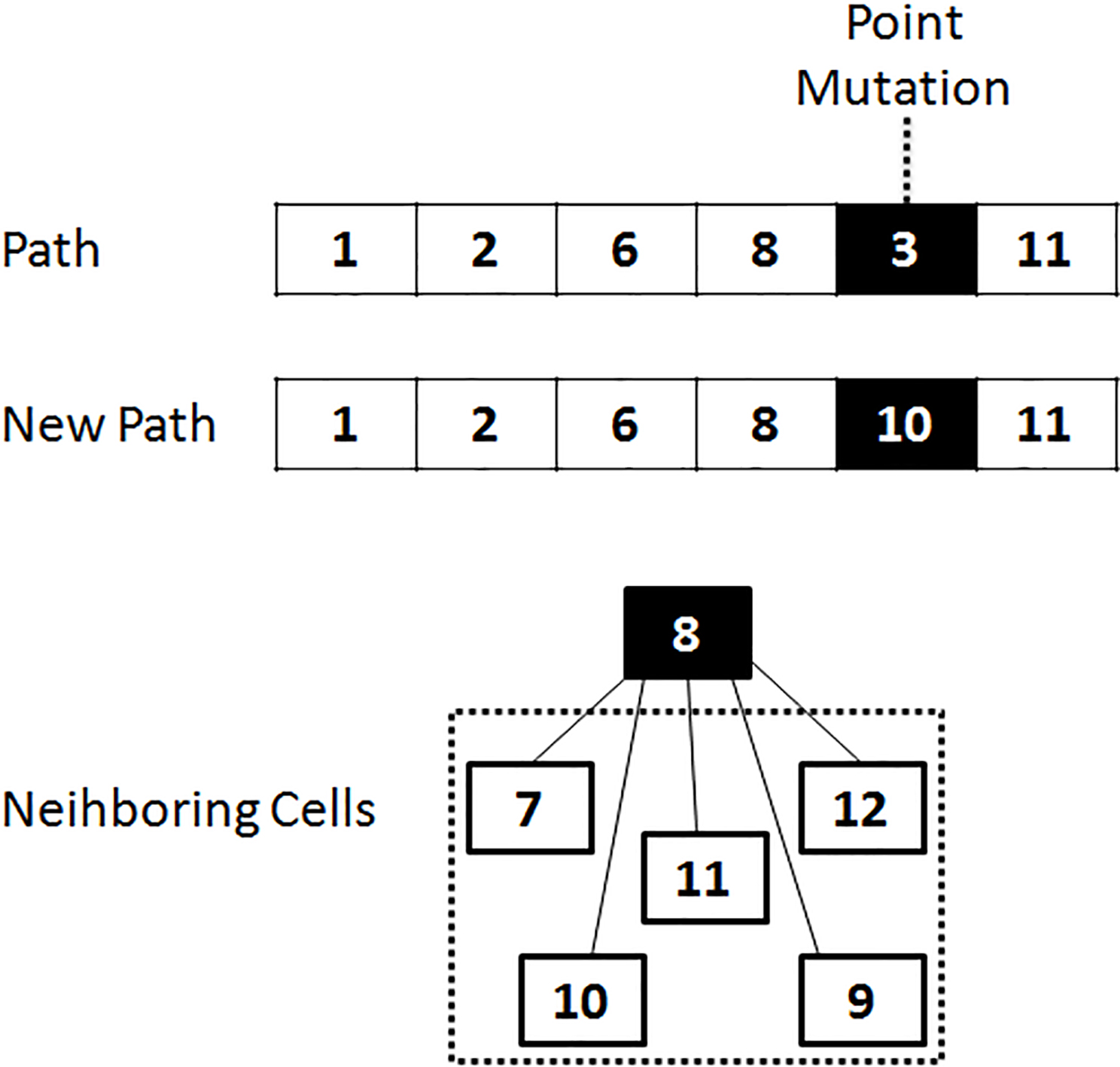
Modified GA based trigger process: the modified GA based process is triggered when the
Solution 2- proposed CCA trajectory planning: this phase is presented as a second appropriate solution to the trajectory planning problem. Different actions of this solution are mentioned, so that the selected
TPCC setup: this solution of trajectory planning algorithm is based on a Cartesian coordinates. This proposed CCA algorithm can model the behaviour of a
Environment modeling of proposed Cartesian coordinate algorithm (CCA).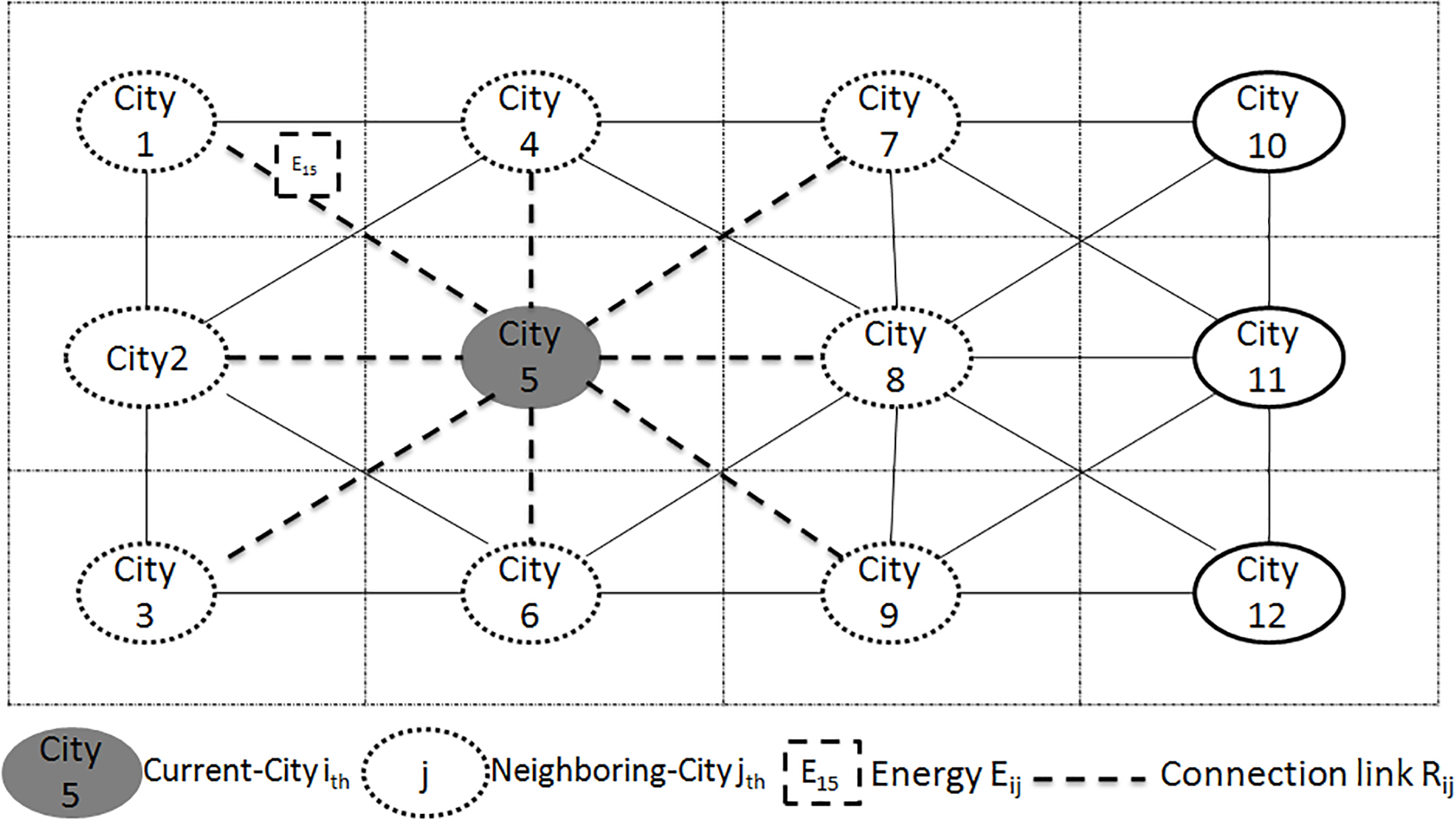
Algorithm 3 presents the method of ‘proposed CCA’ where
Proposed CCA based trigger process: the proposed CCA based process is triggered when the
When
Sequence diagram ‘CCA-based cleaning trigger process for USVcz swarm’.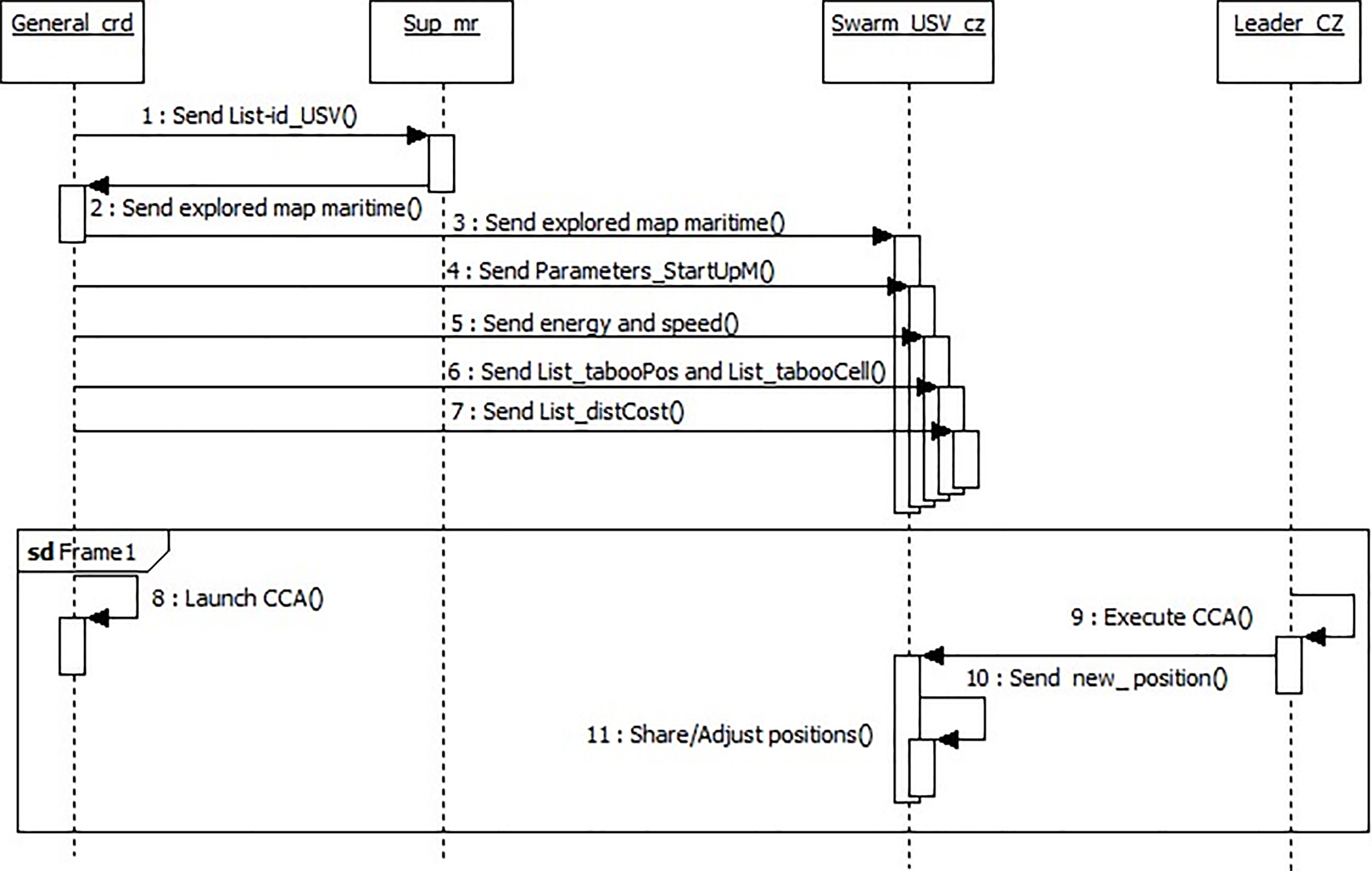
Phase 2. Cleaning operation: this phase allows the
Phase 3. Cleaning finalization: this phase consists in identifying the finalization of cleaning with the different proposed cases. These cases are illustrated based on two states. The first state is defined when the
Case 1: the cleaning task is completed. When the
Case 2: The cleaning task is not completed and Energy
The first situation is presented by Algorithm 5 where the energy capacity (
The second situation is illustrated by Algorithm 6. This situation shows the case where there is not a USV
The third situation is illustrated where if there is not a
The fourth situation is presented where there is not a free and competent USV to complete the task of USV in discharge state. This situation is illustrated by Algorithm 7.
Case 3: The cleaning task is not completed and Energy
Directly to
After,
Conceptual model for planning
A conceptual model is a simple theoretical device to describe the main elements of a problem [8]. Most of the planning approaches described in [9] relied on a general model, which is common to other areas of computer science, namely the model of state-transition systems (also called discrete-event systems) [2, 3, 8, 9]. The technical words of this formalization (further details in [3]) are given in a general way.
A detailed description of domains: UAV-M, SUSV and USVS-C
A detailed description of domains: UAV-M, SUSV and USVS-C
The planning procedures and techniques are illustrated on an example of simple nontrivial execution that include three domains, namely UAV-M, SUSV-C and USVS-C domain. These domains complement each other. An abstract version of these domains can be defined to begin from ten complete sets of constant symbols [3], namely a set of: regions (
A state transition system for the UAV – Monitoring (UAV-M) domain.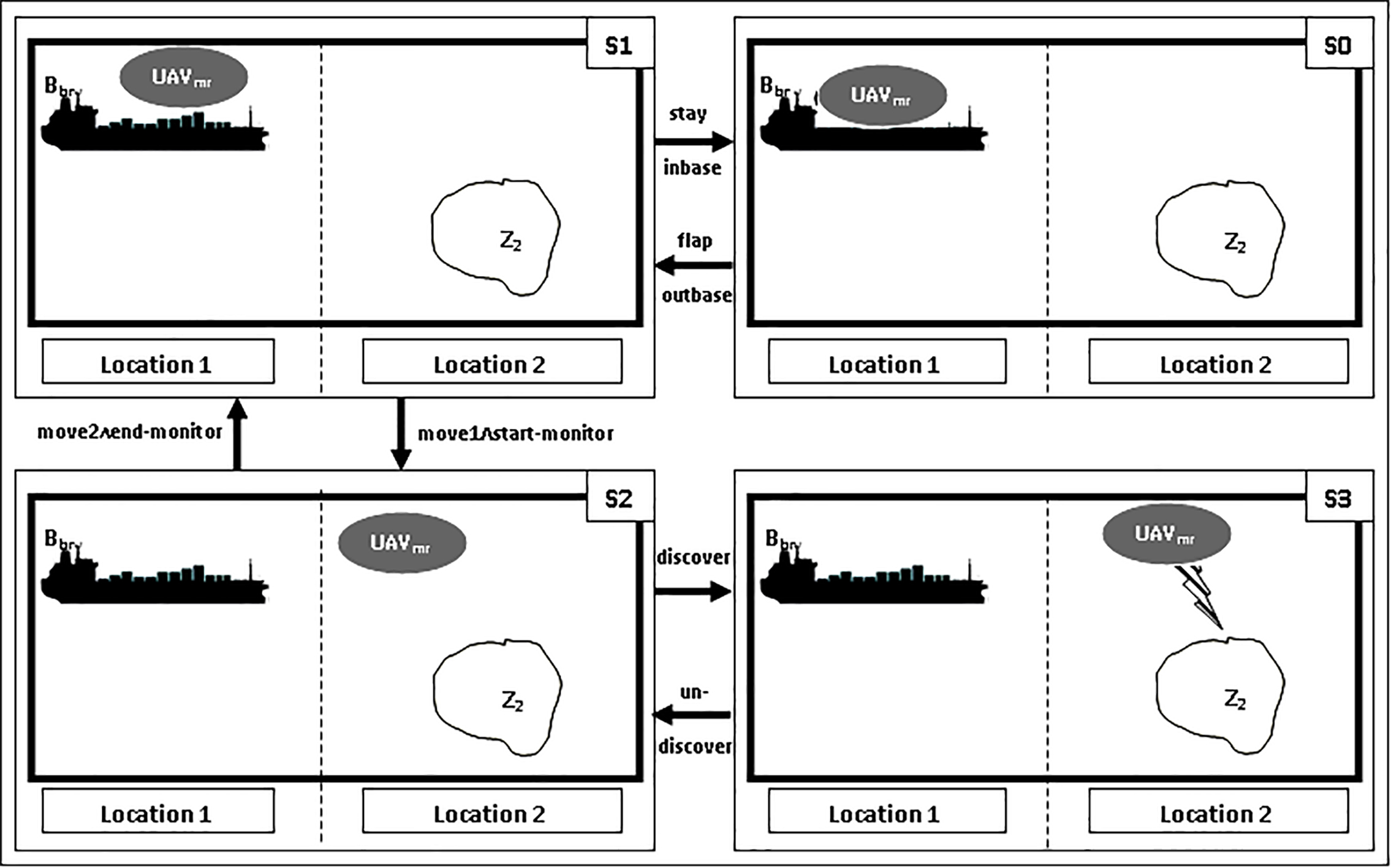
A state transition system for the Swarm (USV) – Cleaning (SUSV-C) domain.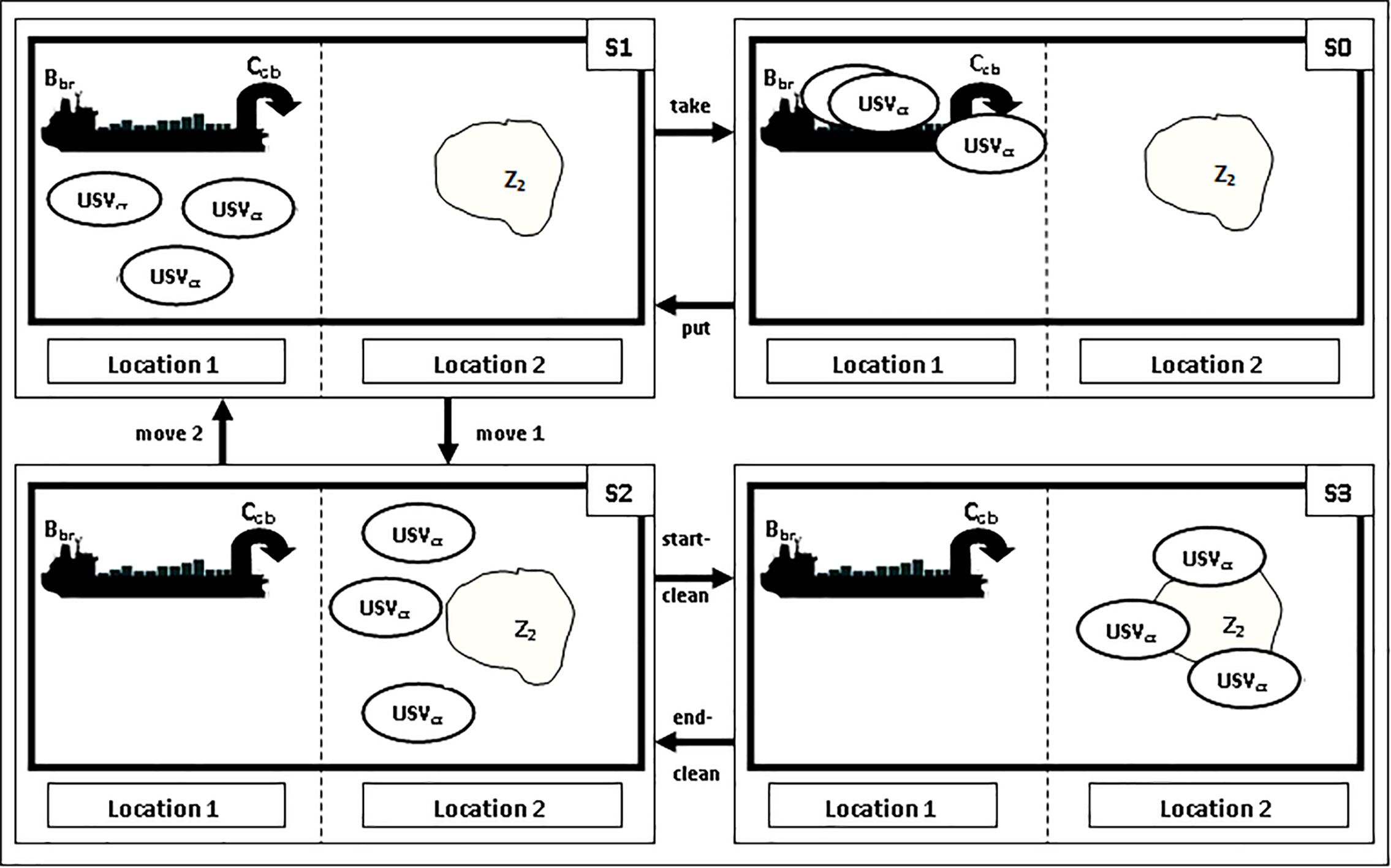
Thus, the topology of this domain is noted using the instances of predicates [3]: adjacent(E, E’) where localization
A state transition system for the USV (Substitute) – Cleaning (USVS-C) domain.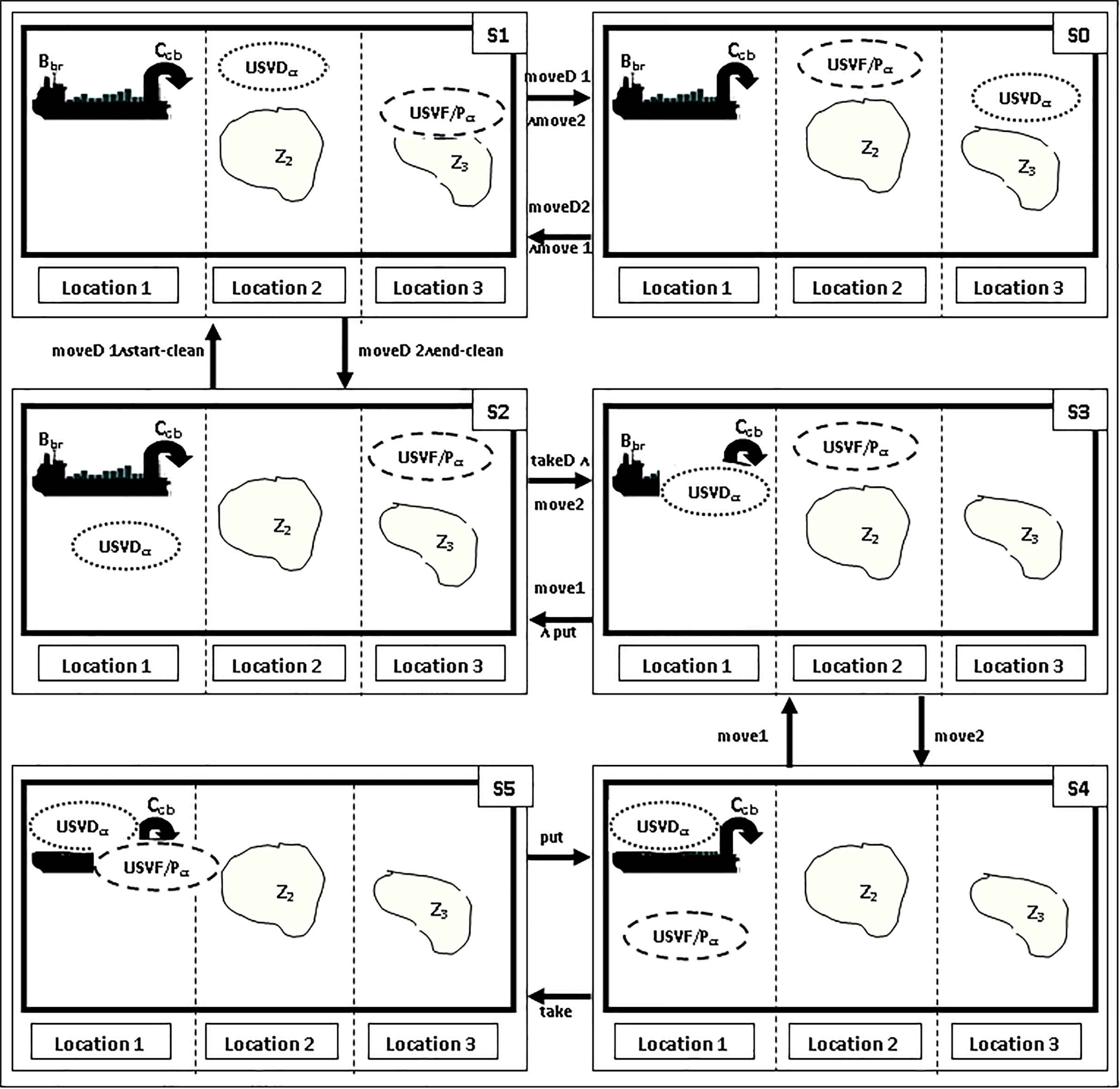
There are three different ways to represent classical planning problems [8], namely: i) Set Theoretic Representation, ii) Classical Representation, iii) State-Variable Representation. This work focuses on the first representation (Set-Theoretic) to apply its planning on the proposed HA-UVC.
Let
For the UAV-M domain combined with SUSV-C domain: L
inair means that NAME1.UAV
onwatersurface means that NAME1.USV
onbase means that NAME1. USV
onzone means that NAME1.USV
holding means that crane C is holding NAME1.USV
at1means that the vehicle NAME1. USV
at2 means that the vehicle NAME1. USV
For the SUSV-C domain combined with USVS-C domain: L
onwatersurface means that NAME1.USV
onbase means that NAME1.USV
onzone means that NAME1.USV
holding means that crane C is holding NAME1.USV
at1 means that the vehicle NAME1.USV
at2 means that the vehicle NAME1.USV
at3 means that the vehicle NAME1.USV
Each state S is a subset of L,
For the UAV-M domain combined with SUSV-C domain: S
For the SUSV-C domain combined with USVS-C domain: S
Each action a
For the UAV-M domain combined with SUSV-C domain: A
stayintbase
take
flapoutbase
put
move1start-monitor
move2end-monitor
discover
undiscover
supervise
notsupervise
start-clean
end-clean
move1
move2
For the UAV-M domain combined with SUSV-C domain: A
take
put
moveD1start-clean
MoveD2end-clean
replace
notreplace
moveD1move2
moveD2move1
takeDmove2
move1putD
move1
move2
Simulation
An illustrative example with two scenarios for dirty zones (with a strong degree of dirt and a low degree of dirt) is provided to simulate the functioning of the proposed approach. Two trajectory planning solutions are given for
Discretization of the virtual environment
Figure 18 illustrates a simplistic example of the virtual environment of the Oran Coast (Fig. 2). The maritime space of a region ‘Maritime Region’ is assumed to includes two polluted zones ‘Z1 and Z2’, three obstacles ‘O1, O2 and O3’ and a central unit which consists of a base of life. These dirty zones are proposed according to the degrees of dirt in this region, namely: Z1 and Z2 that respectively represent the low and strong degrees of dirt. After defining the degrees of dirt randomly for this environment with two different zones, the discretization step is activated. A matrix is obtained, where the black cells represent the dirty zones. While the obstacles are illustrated by grey cells (see Fig. 19).
Example of a simplistic virtual environment.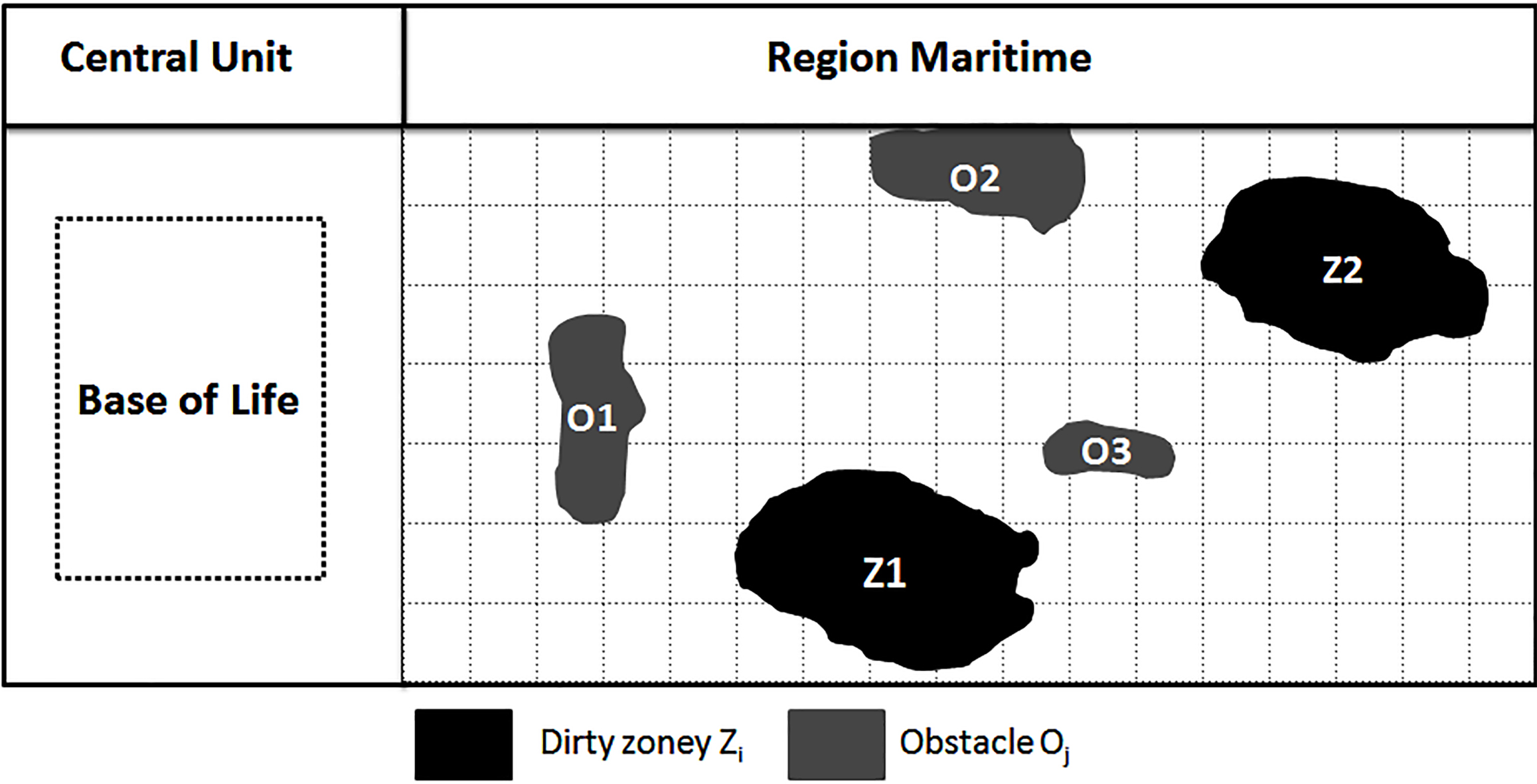
Matrix of discretization of region.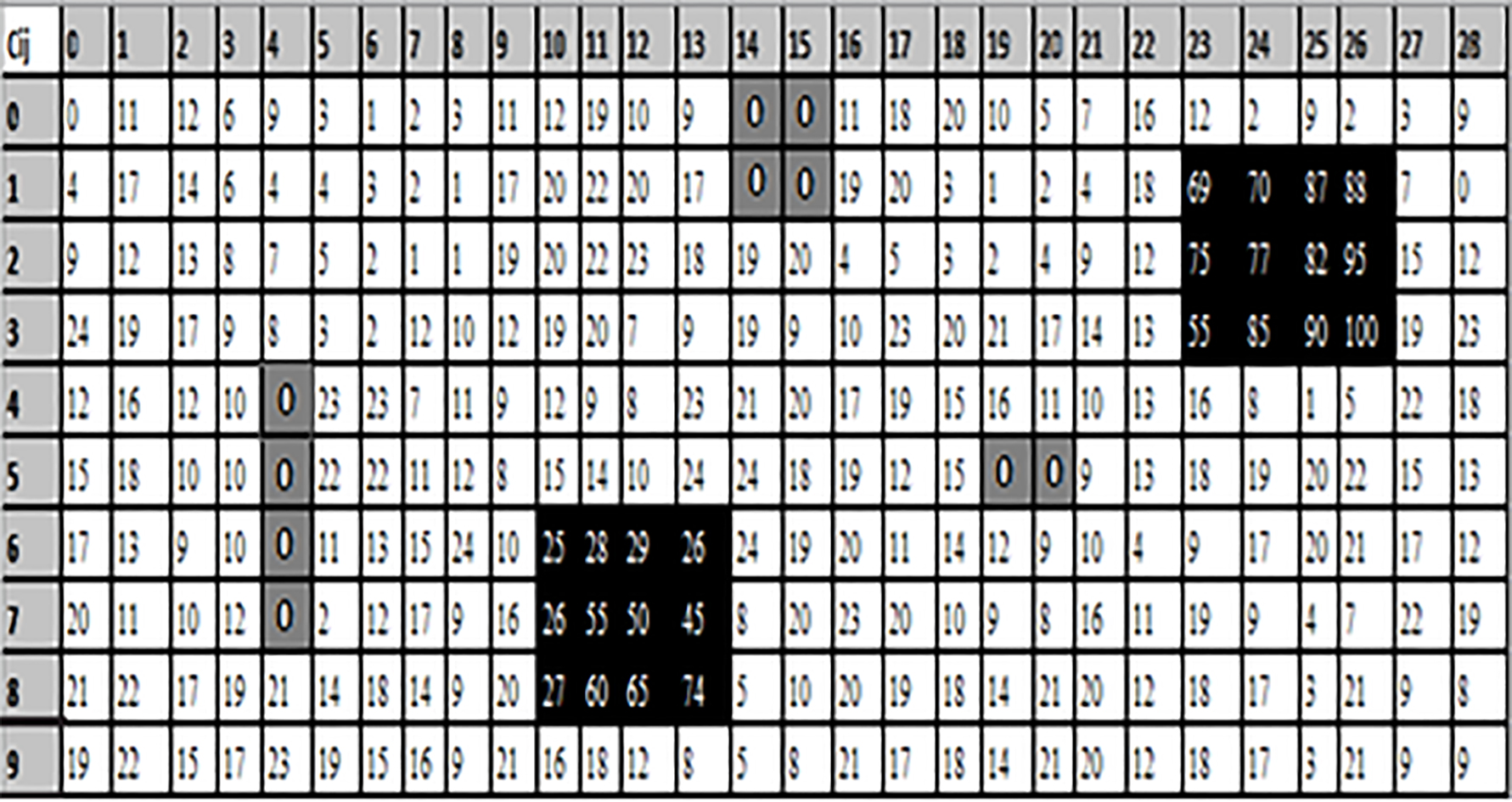
Before starting the simulations of the proposed scenarios, the assumptions and parameters are presented in this section that are used in this work with the two solutions for trajectory planning. These solutions were implemented by using a modified GA and a proposed CCA. These two algorithms are programmed via an open source Java. The simulations were run on a PC with a Core (TM) i5-5200U @ 2.20 GHz running the Windows 7 Professional Operating System.
The proposed HA-UVC was implemented for a maritime region, where containing strong (hard) obstacles. This region includes a surveillance vehicle (
Displacement energy consumption (DEC) in a zone with a low degree of dirt.
The cost value between the cells in the grid is randomly generated between 5 and 10. The energy required for the
This scenario presents the simulations results for a dirty zone with low degrees of dirt. These results give the curves of displacement energy consumption (DEC), displacement plus cleaning energy consumption in the zone (D-CEC) and total energy consumption (TEC) of
Result of displacement energy consumption (DEC): Figure 20 shows the results of DEC of each
Displacement plus cleaning energy consumption (D-CEC) in a zone with a low degree of dirt.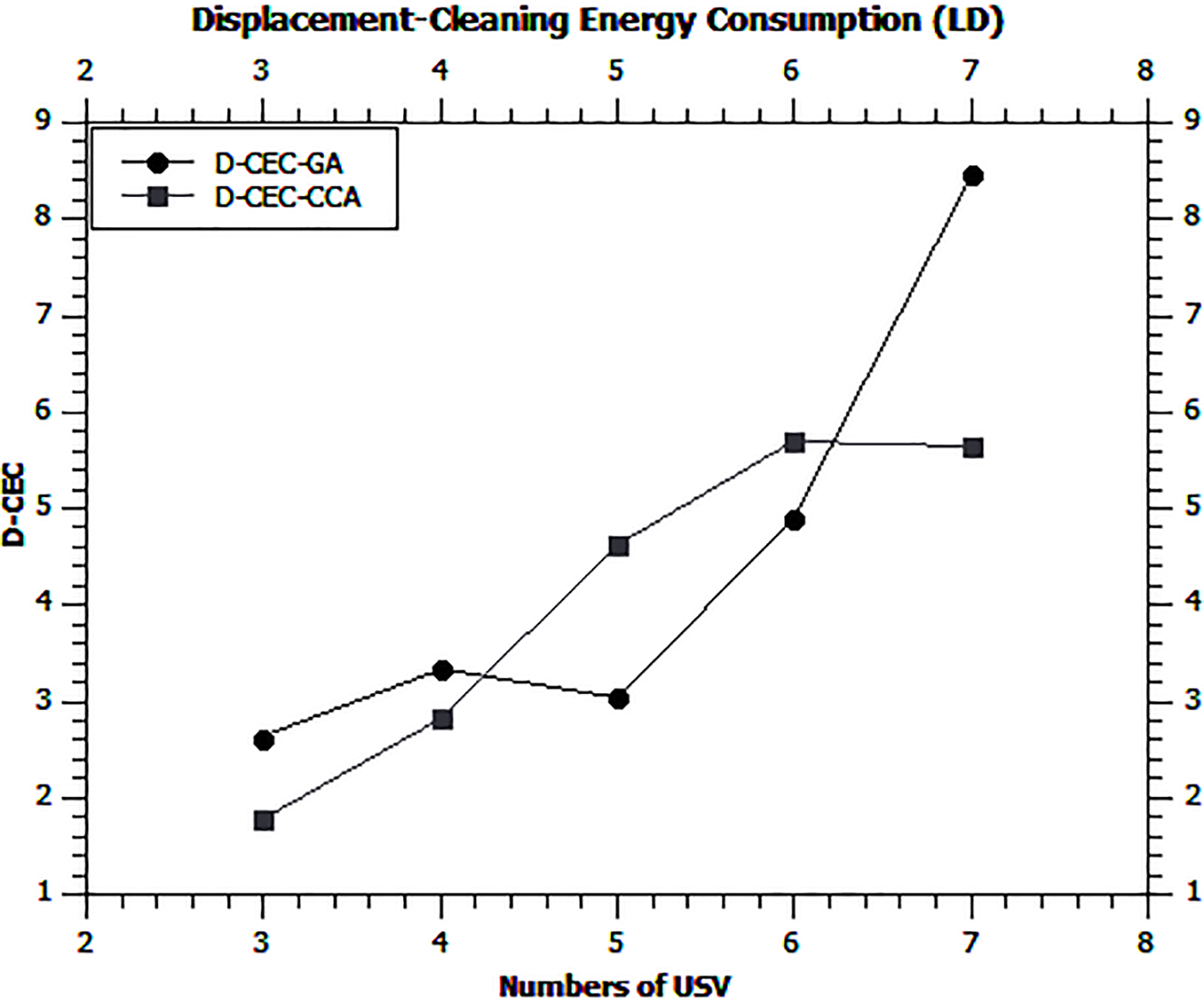
Result of displacement-cleaning energy consumption (D-CEC): Figure 21 shows a simulation to evaluate the
Result of total energy consumption (TEC): the two previous results were combined to calculate the TEC based on the two proposed algorithms. Figure 22 shows that the TEC curve of proposed CCA is below the TEC curve of modified GA. Therefore, the proposed CCA proposal consumes less energy in comparison to the modified GA with an average gain of 3.74% in a zone of low degrees of dirt.
Total energy consumption (TEC) with in a zone with a low degree of dirt.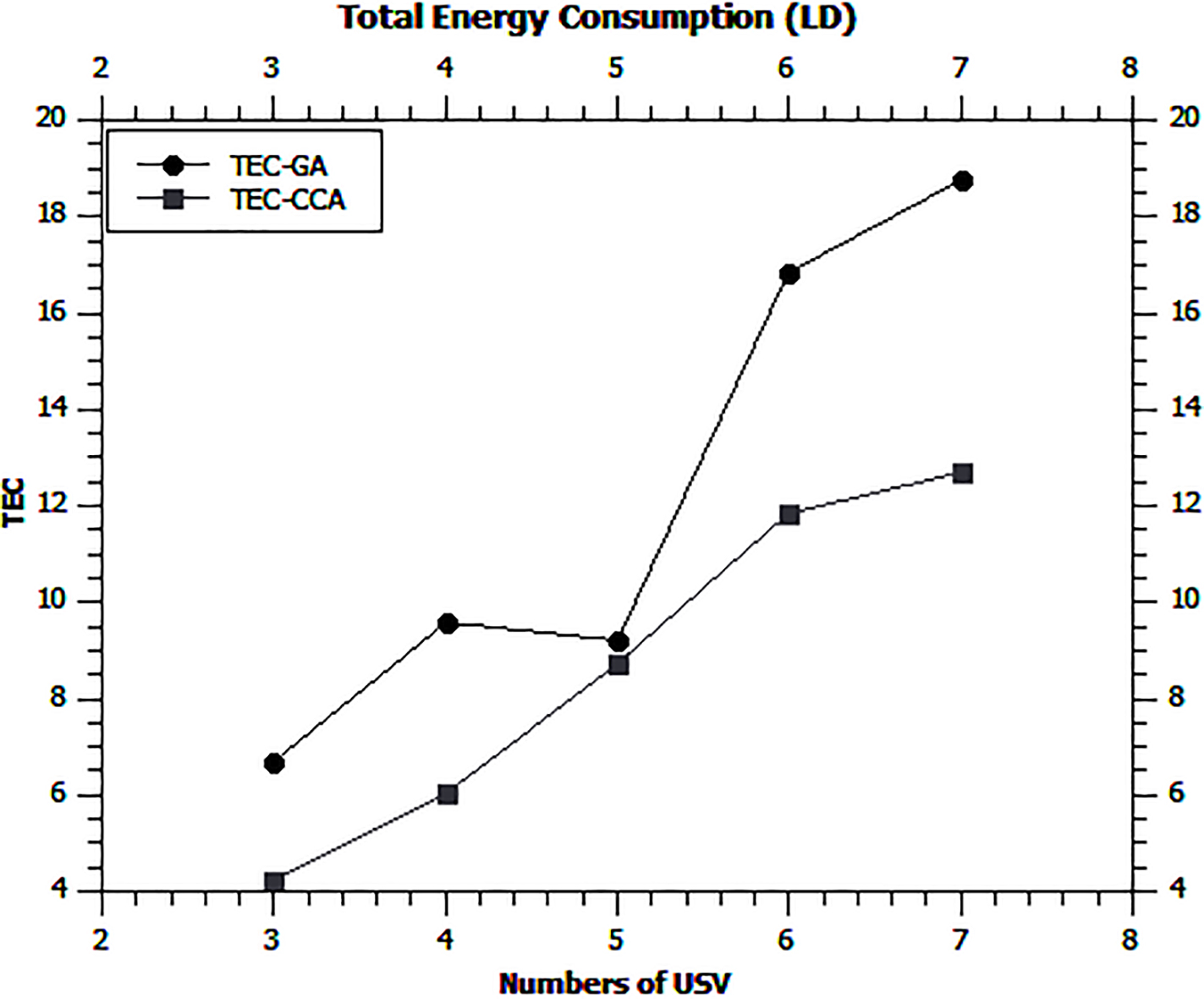
Displacement energy consumption (DEC) in a zone with a strong degree of dirt.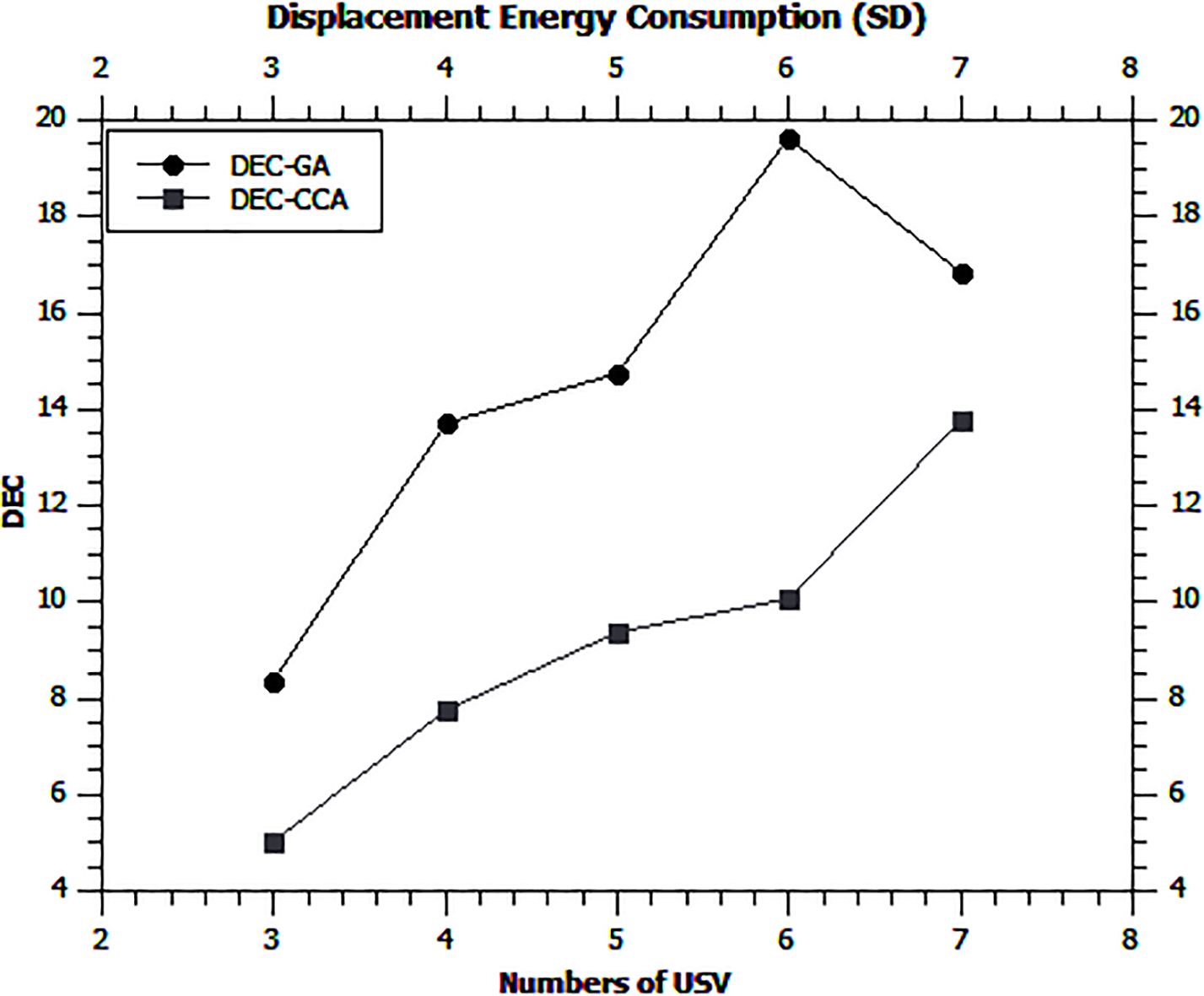
The second scenario shows the simulations results for a dirty zone with strong degrees of dirt. These results give the curves of displacement energy consumption (DEC), displacement plus cleaning energy consumption (D-CEC), and total energy consumption (TEC) of
Result of displacement energy consumption (DEC): Figure 23 shows the results of the displacement energy consumption of each
Result of displacement-cleaning energy consumption (D-CEC): Figure 24 presents a simulation that evaluates the
Comparison between several related works
Comparison between several related works
Displacement plus cleaning energy consumption (D-CEC) in a zone with a strong degree of dirt.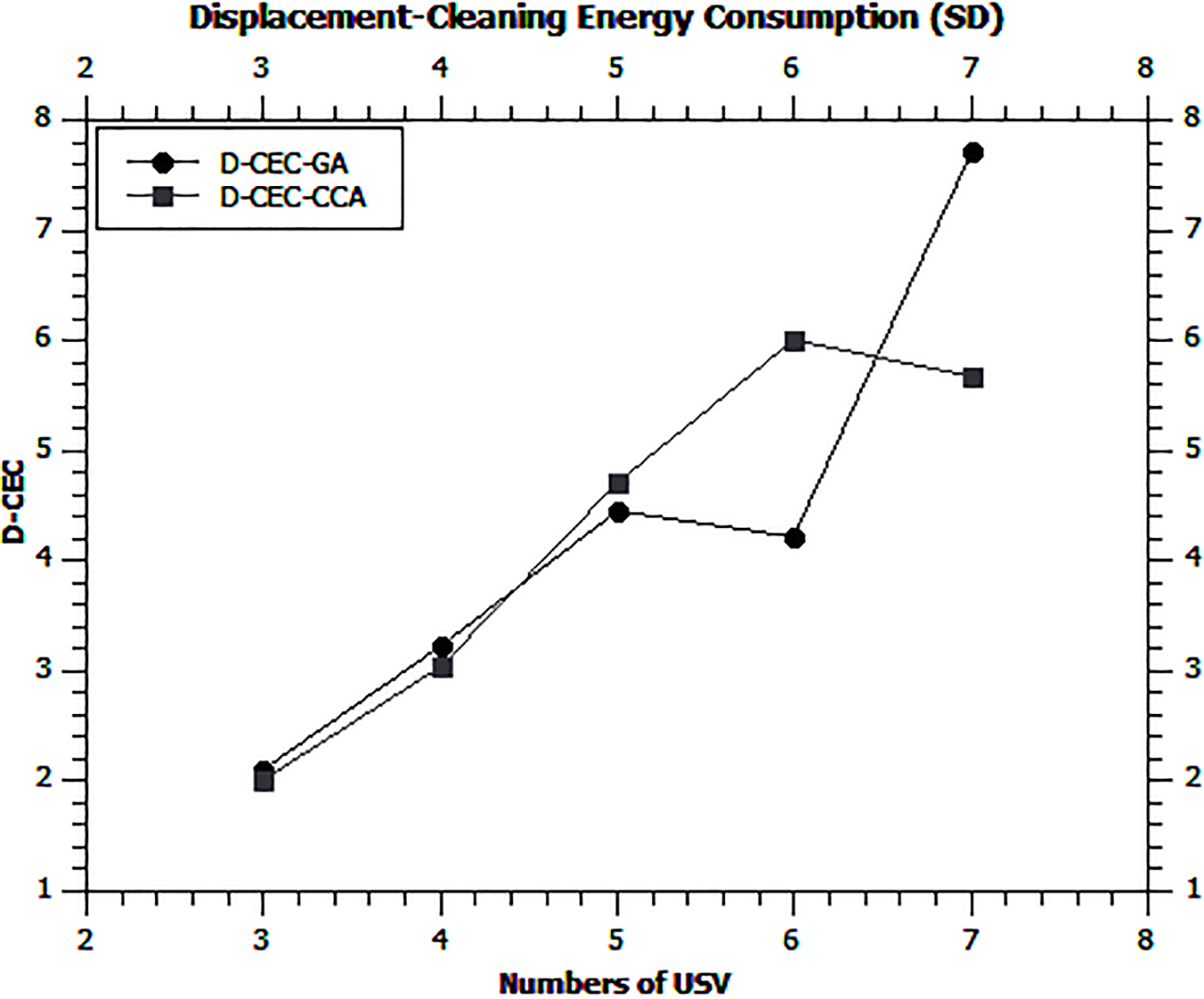
Total energy consumption (TEC) with in a zone with a strong degree of dirt.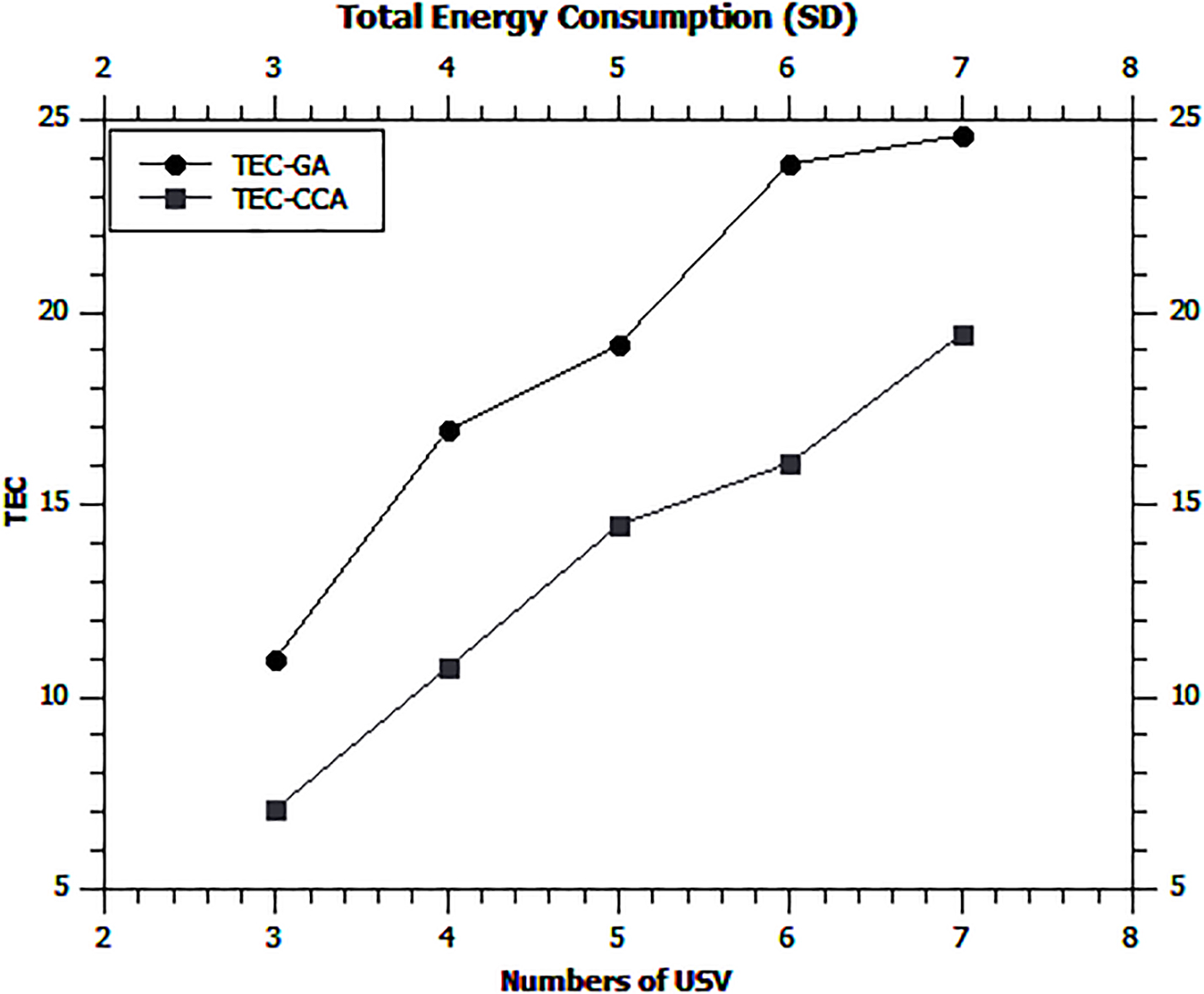
lent in D-CEC consumption. In addition, the amount of energy consumed by a swarm of 5 and 6
Result of total energy consumption (TEC): the two previous results were used to calculate the TEC based on the two proposed algorithms. Figure 25 shows that the TEC curve of proposed CCA is below the TEC curve of modified GA. Therefore, the proposed CCA proposal consumes less energy than the modified GA with an average gain of 5.52% in a zone of strong degrees of dirt.
This section positions a HA-UVC in relation to the literature review cited above (Section 2). Each mentioned study has its own characteristics/parameters that differentiate it from others. Table 5 presents a comparative study of these studies and the benefits of the proposed HA-UVC.
In this proposed hybrid, a method of cooperation and coordination between a general coordinator, a semi-autonomous unmanned ariel vehicle (UAV
The communication link of IEEE.802.11a standard is used between the UAV and the general coordinator, and another of IEEE.802.11b standard to connect the UAV with the USV swarm with respect to network cited in the paper of [7]. During the test, the Waste Hunter Surface is examined with four motion conditions, namely: forward, backward, left and right motion like the
The design of UAV flight plans used in HA-UVC is based on a map (square-shaped 2D grid), onboard sensory sensors and two movements, namely: rectilinear and sweeping. With a sweeping motion, it prepares a maritime space map of its region (lower level) with its captured data. On one hand, the flight plan proposed in [1] is based on the information recorded after the disaster and the mapping capabilities of UAVs. The color was chosen as a degree of dirt from the dirty zones, so that UAV could detect them and start the cleaning as it is mentioned in [2]. Thus, the robot of [6] has a function to control the data quality (PH value) of the water. On the other hand, the developed USV [21] locates the gas source in the sea by two on-board gas sensors. The latter system is effective in performing its tasks like the system of [5, 14, 15, 16, 17, 21, 22] compared to HA-UVC.
Subsequently, UAV sends its environment card to its
In addition, the swarm applies both solutions to find an effective trajectory from its initial position to its objective with less distance and minimum obstacles as the effective global path with a short distance, a minimum of turns, and repeated clean positions cited in [15]. Another MDIGA algorithm presented in [14], in order to find a shorter optimal path, a faster convergence speed, and a better robustness than the other algorithms (CGA, SDGA, DDGA). The fitness function of the modified GA is calculated in relation to the energy consumed between the travelled positions and the consumed energy by all the performed actions (turn left/right or continue directly) by the USV. In contrast, the fitness function of [4] is based on the distance travelled and the Euclidean distance from the goal. The tournament selection method [20] and the one-point cross have been applied in the modified GA and GA of [2, 4, 14]. The tournament is not mentioned in the work [14]. However, the crossover has been presented with different techniques. The mutation was not applied in this work compared to other work [4, 2, 14] because it was noticed that the two new children (trajectories) are 100% correct at the end of each generation (after the crossover step).
Furthermore, The static obstacle avoidance method of
The two proposed solutions for trajectory planning were also compared with respect to the two different scenarios, namely zone with a strong degree of dirt and a zone with a low degree of dirt. Each swarm of
To this end, the simulation results obtained confirmed the choice to use both solutions of planning trajectory, and the proposed HA-UVC allows the scalability of its system like the other systems mentioned in [2, 3, 7, 15, 17]. Thus, the proposed CCA algorithm has tremendously given encouraging and boosting results compared to the modified GA.
Conclusion
This article presented a hierarchical decision system for a HA-UVC. This HA-UVC represents the cooperation of several semi-autonomous unmanned vehicles (a
Two scenarios were proposed to simulate this proposal, namely a zone with strong degrees of dirt and a zone with low degrees of dirt. The measurements measured are the displacement energy consumption (DEC), the displacement-cleaning energy consumption (D-CEC), and the total energy consumption (TEC) of each
This work did not address the failure problem of central unit (i.e. the
Footnotes
Authors’ Bios