
Abstract
Automating planning for large teams of heterogeneous robots is a growing challenge, as robot capabilities diversify and domain complexities are incorporated. Temporal and continuous features accurately model real-world constraints, but add computational complexity. Distributed planning methods, such as the Coalition Formation then Planning framework, allocate tasks to robot teams and plan each task separately to accelerate planning. However, the task decomposition limits cooperation between coalitions allocated to different tasks and results in lower quality plans that require more actions and time to complete. Task Fusion estimates couplings between tasks and fuses coupled coalition-task pairs to improve cooperation and produce higher quality plans. Task Fusion relies on existing heuristics, which were ineffective and often resulted in worse results than the baseline framework. This manuscript introduces new heuristics that outperform the existing methods in two complex heterogeneous multi-robot domains that incorporate temporal and continuous constraints.
Introduction
Robots are rapidly moving into the commercial, medical, and military domains. The fast-paced development of sensing, processing, and actuation devices at increasingly lower costs is resulting in robots with a growing variety of capabilities, approaching a world where robots are ubiquitous and diverse. Robots have proven potential to assist in response to major disasters, such as search and rescue, bomb defusal, and natural disasters, but currently highly trained operators make most decisions, while the robot decision making is limited to low level actions [2]. Exploiting the potential of autonomous robots will require scalable automated planning capable of modeling complex problems that incorporate a diverse set of robots [2].
First response for natural and man-made disasters requires rapid evaluation and deployment of available personnel and equipment in order to mitigate the situation, which when combined with the robotic aspects, greatly increases the complexity of the deployment allocation and assignment problems. Existing planning methods (e.g., [7, 11, 20, 41]) fail to account for all of the domain’s complexities, such as requiring continuous fluents (e.g., fuel capacity), concurrent actions (e.g. simultaneously triaging multiple victims), and real-time results (e.g. planning and executing the plan within the task deadlines). Existing methods can only meet some of these requirements and cannot scale to a large number of heterogeneous robots [23].
Dukeman and Adams [18] developed the hybrid Coalition Formation then Planning (CFP) framework to merge automated planning and coalition formation with improved scalability to dozens of robots when developing continuous temporal plans. The CFP assigns robots to coalitions according to their capabilities and allocates tasks to each coalition. Planning for tasks separately accelerates planning, but limits cooperation between coalitions, lowering plan quality, and requiring more actions and time to execute.
Task Fusion merges coalition-task pairs in order to improve the plan quality by evaluating the coupling of each pair. Task Fusion uses heuristics to estimate coupling and fuse the highest scoring pairs; thus, allowing explicit cooperation between robots in the fused coalitions and improved plan quality. However, prior analysis of Task Fusion effectiveness was inconclusive [18]. While some problems solved using Task Fusion resulted in better quality plans, most produced worse quality plans, due to inaccurate heuristics.
This manuscript’s main contribution addresses the limitations of CFP and devises new heuristics that estimate coupling between tasks and coalitions. Detecting couplings allows fusing tightly coupled coalition-task pairs, which improves cooperation and reduces plan length; thus, producing higher quality plans that contain fewer actions and require less time to execute. The new heuristics leverage plan distance as a proxy for the coalition-task coupling estimation. Plan distance heuristics, previously used as a measure of plan diversity [40], were adapted for estimating problem coupling in Task Fusion. Relaxed plans are determined rapidly from the coalition-task problems, and the distance between relaxed plans indicates the level of coupling that informs the Task Fusion. The plan distance heuristics provide better plans that require fewer computational resources for planning. This manuscript introduces new plan distance heuristics, presents and evaluates four new hypothesis, incorporates four new metrics, and evaluates the CFP framework using an additional planner.
Literature review
Automated planning for teams of heterogeneous robots is a specific application of multiagent planning. Multiagent planning is the more general field of planning, which goes beyond embodied physical robots and can involve other types of agents, such as software agents. Software agents are abstract decision making entities, such as web crawlers and stock traders, whereas robot systems have physical embodiment in the form of sensors and actuators, often associated with a mobile body [45]. Distributed temporal continuous planning incorporates temporal constraints and continuous numerical fluents to more accurately model real-world problems for multiple robot systems.
Planning for complex domains, such as first response, requires the classical planning model to be extended to incorporate expressive features, such as concurrent action execution (e.g., [9, 26, 34]) and continuous fluents (e.g., [7, 10, 11, 20]). No single planner incorporates all the necessary features, and the most expressive algorithms are unable to scale to complex problems with multiple robots or task complexities [22]. However, significant performance improvements can be achieved by factoring the problem based on the system and the environment [31]. Multiagent factoring distributes the plan synthesis across multiple planning agents in order to reduce the computational complexity [42]. The planning problem is partitioned into tasks and task plans are devised independently. Planning agents coordinate before planning, to allocate tasks, and after planning, to merge the individual plans and minimize conflicts [16]. Planning coordination remains a challenging problem, especially for problems with tightly coupled tasks [5] that have mutual dependencies, such as shared locations and resources (e.g., tools and assets), and cannot be independently solved. The independent execution of one task can alter the environment and jeopardize the ability to accomplish tasks.
Plan merging algorithms allow agents to coordinate after planning in order to solve action redundancies and consistency flaws [13]. The Multiagent Plan Coordination by Plan Modification Algorithm minimizes the resulting number of actions while merging independently generated plans [13]. A set of actions is replaced by a single redundant action, resulting in merged plans with fewer actions, but the algorithm’s scalability to a large number of robots is limited. The Temporal Optimal Conflict Resolution Algorithm employs a search relaxation constant in order to scale to a large number of robots, but cannot scale to a large number of tightly coupled tasks [28]. Another temporal plan merge algorithm generates relaxed plans for each task prior to merging [29], but is not applicable to multiple robot tasks.
Decentralized planing algorithms can use serial plan synthesis for tightly coupled tasks [17]. Robots generate plans iteratively, where each planning agent assumes that its initial state is the prior agent’s final state. The planner’s goals are concatenated with the goals of the next planning agent in order to guarantee that the next agent will not undo the previous agent’s achieved goals. Serial plan synthesis does not require serial plan execution. The serially synthesized plans can be merged for parallel execution; however, most existing decentralized planners assume serial plan execution. Rather, the agents take actions in turns, which hinders applicability to real-world multiple robot systems [42]. Parallel action execution requires sophisticated coordination methods that optimize parallel plan execution, while also minimizing makespan, the plan execution time.
The Multi-Agent Planning by Plan Reuse algorithm performs task allocation then planning using relaxed reachability analysis after generating relaxed plans for all agent-task combinations. However, the method requires homogeneous agents [4]. The algorithm can be applied to a heterogeneous mobile multiple robot system by using actuation maps instead of relaxed plans, but it does not generalize to complex tasks [32].
Task allocation can address coupling and optimize parallel plan execution with problem decomposition [6]. The agent interaction graph minimizes the problem coupling when allocating tasks in order to reduce computational complexity [6]. The problem decomposition is formulated as a constraint satisfaction problem, but solving the constraint satisfaction problem dominates the plan synthesis time, rendering the algorithm inefficient [15]. The Agent Decomposition-Based Planner uses causal graphs to decompose the planning problem [15], and has been extended to support concurrent actions in a real-world industrial mobile manipulator robot domain [14], but does not scale to a large number of robots. The Multiagent Planner for Required Cooperation allocates tasks to
Models of capabilities were used recently as a heuristic for state-space forward search [46]. Capabilities are modeled as the agent’s likelihoods of achieving a particular state from any other state. A Bayesian network learns the likelihood capabilities from plan traces, but requires a large number of plan execution simulations covering initial and goal states. Buehler et. al [8] define a robot capability as an extended action schema that integrates with the underlying Robot Operating System (ROS) [33]. ROS controls action execution and relays abstracted sensor data to a multiple robot planning and execution architecture. However, neither study uses capability models to improve plan quality or reduce computational cost. The following Section presents the promises and limitations of the Coalition Formation then Planning framework for scalable multiagent planning, and introduces a new family of heuristics that address the shortcomings of the approach.
Coalition formation and planning
Coalition formation is an alternative task allocation method for multiple robot distributed planning [18]. Coalition formation generalizes task allocation by assigning entities (e.g., robots or humans) to coalitions to perform tasks (e.g., [1, 21, 38, 44]). The entities are grouped into coalitions according to the capabilities offered by the individual entities and the capabilities required to complete the tasks. Capabilities represent resources (i.e., sensor range and battery power) or services, (i.e., distance measurement or image acquisition) [37]. This Section formally defines coalition formation as applied to multiple robot planning, and introduces a new family of heuristics to address the shortcomings of the approach.
The coalition formation problem takes a set of
The Hybrid Mission Planning with Coalition Formation (HMPCF) [18] model is represented as a tuple
Planning alone, a fully centralized baseline planning method, groups all robots and tasks into a single-agent multi-effector planning problem. Planning Alone synthesizes a goal set
Coalition formation then planning (CFP) is a hybrid method that leverages coalition formation to minimize combinatorial complexity and overall planning time. The robot and task capability vector sets and coalition formation algorithms are used to generate the coalitions and assign tasks, invoking planning algorithms for each coalition-task pair. The resulting coalition-task pair plans are merged into a global plan, as presented in Fig. 1b. CFP applies serial plan synthesis and assumes robot coalitions take turns when planning, with coordination occuring before and after planning. Coordination before planning occurs by forming coalitions and allocating tasks, whereas plan merging performs coordination after planning by minimizing action redundancy, while also preventing consistency flaws [13]. Each task planning problem is solved separately, and the task planning problem’s goals are concatenated with the goals of the next task planning problem in order to guarantee that the following task plan will not undo the goals achieved by the prior task plan. CFP uses capabilities to inform problem partitioning.
Planning alone (a) and the coalition formation then planning framework (b). Rounded filled shapes represent processes and rectangles represent data. Coalition formation then planning extracts robots’ and task’s capabilities from the problem description, partitions the robots into coalitions and generates separate plans for each coalition. The coalition plans are merged into a global plan [18]. 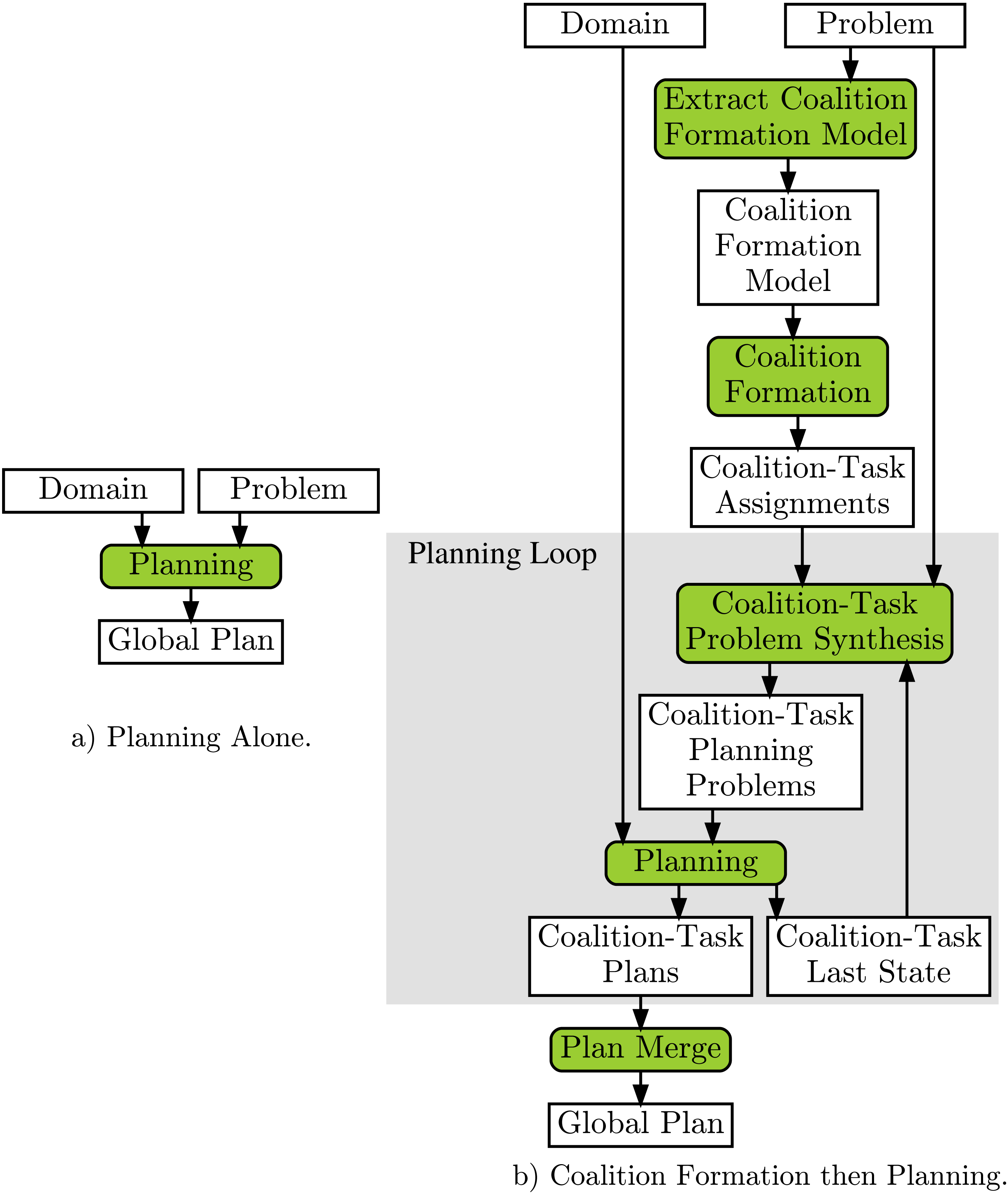
The Extract Coalition Formation Model process derives robot and task capability vectors from the problem description [18]. Coalition formation generates coalition-task pairs and the Coalition-Task Problem Synthesis process uses the coalition-task pairs, the problem description, and the final state achieved by the latest coalition-task plan to generate separate planning problems for each coalition-task pair. The Coalition-Task Planning Problems are solved separately by external planners, such as COLIN [11] or TFD [20]. The planner produces a plan for each coalition-task pair, and the resulting plans are merged into a global plan using a greedy approach [18].
Multiple robot planning is largely an intractable problem, but assigning tasks to the most appropriate robot coalitions scales significantly better. The coalition formation problem is NP-hard [38], but domain-independent planning is EXPSPACE-complete [19]. The plan synthesis time can be orders of magnitude longer than the corresponding coalition formation problems; thus, the overhead created by coalition formation is minimal. The problem complexity is reduced by generating multiple small-action-set plans. The reduced search branching factor permits derivation of plans for significantly larger problems [18]. The CFP framework is agnostic to the coalition formation algorithm adopted and uses external algorithms [36].
Coalition formation can scale planning to larger numbers of robots and more complex tasks, but results in poor quality plans, that have longer makespan than centralized planning (i.e., Planning Alone) [18]. The model of capabilities used by coalition formation does not reveal whether tasks are tightly coupled, limiting cooperation between coalitions allocated to different tasks and results in lower quality plans that require more actions and time to complete. Plan quality can be improved by partitioning the planning problem along coalition and task coupling lines [6]. The most tightly coupled coalition-tasks pairs are fused, whereas the most loosely coupled remain separate. When two coupled coalition-task planning problems are solved separately, the planner considers each tasks’ goals individually, and produces potentially redundant action sequences [42]. However, when two coupled coalition-tasks are fused, the actions for one task can contribute to achieving states necessary to achieve another task and can generate higher quality plans. Planning uncoupled coalition-task planning problems together does not improve plan quality, and often increases planning complexity.
Coalition formation was enhanced with Task Fusion in order to account for tightly coupled tasks and generate higher quality plans at a lower computational cost [18]. After coalition formation, tightly coupled coalition-task pairs are fused into larger coalition-task pairs. The fused coalition-tasks plans can be synthesized faster and result in shorter makespan with fewer actions. Fusing allows the planner to address the tasks’ mutual dependencies and facilitates cooperation between the fused coalitions. The result of Task Fusion over coalition-task pairs
Task fusion is the fusion of tasks and the assigned coalitions. Both coalitions and tasks are fused. Tasks are fused by concatenating the goals of the original tasks. Coalitions are fused by combining or taking the union of the members of the original coalitions. A coalition-task pair consists of a task and a coalition. Fusing a coalition results in a new coalition where the members of the original coalitions are combined. Fusing tasks results in a new task, where the goals of the original tasks are concatenated. Members from both coalitions will be considered during plan generation, as the goals of both tasks must be satisfied by the resulting plan.
Coalition-task coupling is estimated by a heuristic that maps two coalition-task pairs
[!htb] The task fusion algorithm.
The previously developed heuristics estimate coalition-task coupling based on the coalition formation model of capabilities [18]. The Coalition Similarity (CS) heuristic,
New task fusion heuristics with plan distance
Heuristics for Task Fusion can become more accurate and achieve better planning results by incorporating an estimation of plan distance. Plan distance metrics were developed to quantify solution diversity in plan synthesis and can estimate the level of similarity between two plans [40]. Nguyen et al. [30] formulate a distance function between two plans
Plan distance heuristics can use the plan’s logical objects, in addition to the plan’s actions. Logical object instances are extracted from the plan actions’ argument lists in order to reveal problem details that otherwise are ignored when only actions are considered. The overlap of actions and logical objects between two plans indicates the plans’ level of similarity and coupling. Higher overlap of actions and logical objects indicates that the robots interact with common objects and navigate through common locations, which are represented as logical objects. The use of action sets makes Nguyen et al.’s heuristic unaware of repeated action instances. Lists allow and account for repeated actions, revealing nuances that are otherwise omitted. This manuscript introduces a family of plan distance heuristics that use lists of plan’s actions and logical objects to estimate coupling and generate better planning results with Task Fusion.
The introduced plan distance heuristics consider the overlap of actions and logical object occurrences between two plans in order to estimate coupling [27]. The Object heuristic (O), the Action heuristic (A), and the Action-Object heuristic (AO), are based on overlaps in the action, object, and both action and object occurrences, respectively. The time at which each action is scheduled to occur is used to extend each heuristic into three temporal variants: the Object-Temporal heuristic (OT), the Action-Temporal heuristic (AT), and the Action-Object-Temporal heuristic (AOT).
A plan
Object, action, and action-object heuristics
The Object (O), Action (A), and Action-Object (AO) heuristics represent the level of overlap between the logical object and action occurrences in plans
A simple first response example is provided. Assume two coalition-task pairs,
Object-temporal, action-temporal, and action-object-temporal heuristics
The Object-Temporal (OT), Action-Temporal (AT), and Action-Object-Temporal (AOT) heuristics integrate temporal dependencies in order to account for action and object interactions at different times throughout the plan. Each heuristic variant populates the plan lists,
Drawing from the example in Subsubsection 3.2.1, assume the action
Generating full plans to estimate coalition-task coupling can be prohibitively costly, and defeat the purpose of Task Fusion. However, relaxed plans can replace full plans for coalition-task coupling estimation. A relaxation of the problem model, such as to ignore actions’ negative effects, can significantly reduce the computation complexity [25]. Relaxed plans offer a rough approximation of the actual plans and are used to inform forward search [25], reachability analysis [4], and distance metrics [12]. Relaxed plans can provide an estimate of the actions and the involved logical objects required by the full plan, yet require significantly less computation.
The heuristics use plan distance to estimate coupling and inform Coalition Formation. Relaxed plans allow evaluating efficiently the planning elements of coalition-task pairs before planning. Coupling across coalition-task pairs is estimated by the actions and logical objects extracted from the relaxed plans, and the most coupled coalition-task pairs are fused.
Empirical evaluation
The heuristics were evaluated for two different domains chosen to model the complexity of planning for multiple heterogeneous robot systems. Continuous fluents and temporal constraints allow modeling the numerical and temporal constraints necessary for each domain. Multiple robot planning problems with continuous fluents and temporal constraints are yet unavailable in existing standard planning problem benchmarks. The heterogeneous robot systems contain robots with subsets of the capabilities necessary to accomplish each task, and require robots to cooperate. The heterogeneity of robot capabilities, together with complex problems, generate tightly coupled tasks. Ten coalitions of robots and ten missions were randomly generated and combined to form 100 problems per domain. Each coalition generated ten problems, one for each mission, and each mission generated ten problems, one for each coalition. The resulting plans were evaluated based on the plan outcome, makespan, number of actions, processing time, and memory usage.
Blocks world domain
The Blocks World Domain [24] was extended [18] to require temporal constraints and continuous fluents, model a variety of end-effectors, block sizes, multiple robot arms, and incorporate two block sizes. A finite sized table holds stacks of blocks that require specific end-effectors. A specific stacking of the blocks determines the initial and goal states, which a team of robot arms seeks to achieve. Each arm has a subset of available end effectors and each block requires a specific type of end effector. Blocks can be either single- or double-weight. Single-weight blocks can be manipulated by a single arm, while double-weight blocks require two arms. Four types of end effectors were used: friction, suction, magnetic, and encompass. Ten coalitions with a minimum of four robot arms and a maximum of eight robot arms were generated. Ten missions with a minimum of eleven tasks and a maximum of 24 tasks were generated. Tighter coupled tasks have blocks that share the same blocks’ pile. Each arm and grasper require different amounts of time to grasp, manipulate, and release blocks; thus, introducing durative actions. The time to stack and unstack blocks is also dependent on the arm and the block’s initial and final position positions, modeled with continuous fluents.
First response domain
This first response domain [18] models disaster response problems that require coordinating heterogeneous human-robot teams. Human-robot teams cooperate to rescue victims, collect hazardous objects, clear gas leaks, and clear blocked roads after a natural disaster. Prescription drugs inside pharmacies and weapons at pawn shops must be secured to prevent looting and ensure civilian safety. Victim rescue tasks require a human to triage the victim. The resulting triage level determines how the victim is taken to a hospital, either guided by a quadrotor or transported by a rover. The pawn shop cleanup tasks require a police officer to locate, clear, secure, and load the weapons into the police robot for transport to the police base. The pharmacy cleanup tasks require personnel to locate, clear, and secure all prescription drugs, including loading the drugs into a robot for transport to a hospital. The first response domain generates a plan for both robots and humans.
The first response domain was expanded to permit more complex, but realistic problems. One extension is a model of the robot batteries that drain as a function of robot activity over time. As well, the robot load is a numerical fluent; thus, allowing robots to carry a varying number of objects, dependent on the individual robot load capacity. The number of robots, victims, pawn shops, pharmacies, road blocks, gas leaks, and waypoints was drawn from a uniform distribution. Ten coalitions with a minimum of 15 robots and a maximum of 21 robots were generated, with each coalition having a minimum of 1 robot and a maximum of 6 robots per robot type. Ten missions with a minimum of 13 tasks and a maximum of 24 tasks were generated, with each mission having a minimum of 1 task and a maximum of 15 tasks per task type. The coupling between two tasks is stronger when there is overlap between the locations the robots must traverse. Traveling across the environment and performing each task requires significantly different amounts of time, making continuous and temporal constraints critical to a plan’s successful execution.
Experimental design
The experiment’s independent variables are the specific planning methods: Planning Alone (PA), Coalition Formation then Planning (CFP), Task Fusion with the plan distance heuristics: Object (O), Action (A), Action-Object (AO), Object-Temporal (OT), Action-Temporal (AT), and Action-Object-Temporal (AOT), and Task Fusion with the baseline heuristics: Coalition Assistance (CA) and Coalition Similarity (CS). The planning outcomes are: Success, a valid plan is produced; Nonexecutable, no plan can be derived for the task given the coalition’s composition and allocated tasks; Time Fail, the time limit is exceeded; and Memory Fail, the memory limit is exceeded. The fusion ratio,
The dependent variables are the planning outcome, makespan, number of actions, processing time, and memory usage. Makespan represents plan length, measured in seconds [35]. The number of actions is the total number of actions required by the plan to accomplish a task [35]. The processing time, measured in minutes, is the time required to solve a problem, which includes the coalition formation, processing heuristics, planning for all tasks, and merging each task plan into a final plan. The memory usage is the maximum amount of memory allocated, in GB. The makespan and the number of actions metrics indicate plan quality. Higher quality plans have lower makespan and fewer of actions; thus, higher quality plans achieve their goals faster and require fewer actions. Plans with lower processing time and memory usage require fewer computing resources.
The TFD [20] and COLIN [11] planners support temporal constraints and continuous fluents, and were adopted for the Blocks World Domain experiment. A dynamic programming coalition formation algorithm was used [37]. COLIN [11] is the only continuous planner that accommodates the time-varying continuous fluents required for the first response domain. RACHNA [43], a market-based coalition formation algorithm, was used for the first response domain experiment. The relaxed plans were generated by a relaxed COLIN planner, which removes actions’ delete effects [11]. The experiments were performed on an Intel Xeon CPU E5-1630 v4 @ 3.70 GHz
Plan distance heuristics aim to estimate coupling and provide higher quality plans requiring less processing time and memory usage. The first hypothesis (
Results
The results are presented by problem domain and planner. Method quality and cost are represented for multiple metrics. High quality methods minimize the plans’ makespan and number of actions, while low cost methods minimize processing time and memory usage. The concepts of Pareto Dominance and Pareto Strength [47] were adopted for comparing methods across these metrics. Method
The blocks world domain with TFD
The Blocks World Domain with TFD planning was characterized by a positive relationship between the evaluated metrics and the Task Fusion ratio
The Coalition Assistance heuristic (
Blocks world with TFD planning results by method,
, and percentage for successfully generating a plan, nonexecutable coalition, and no plan generated due to time failure or memory failure
Blocks world with TFD planning results by method,
Planning Alone (PA), the Object (O) and Coalition Assistance (CA) heuristics produced the highest success rates, as shown in Fig. 2a. The Object heuristic produced the second highest success rates for
Blocks world with TFD (a) success, (b) makespan, (c) number of actions, (d) processing time, and (e) memory usage by fusion ratio (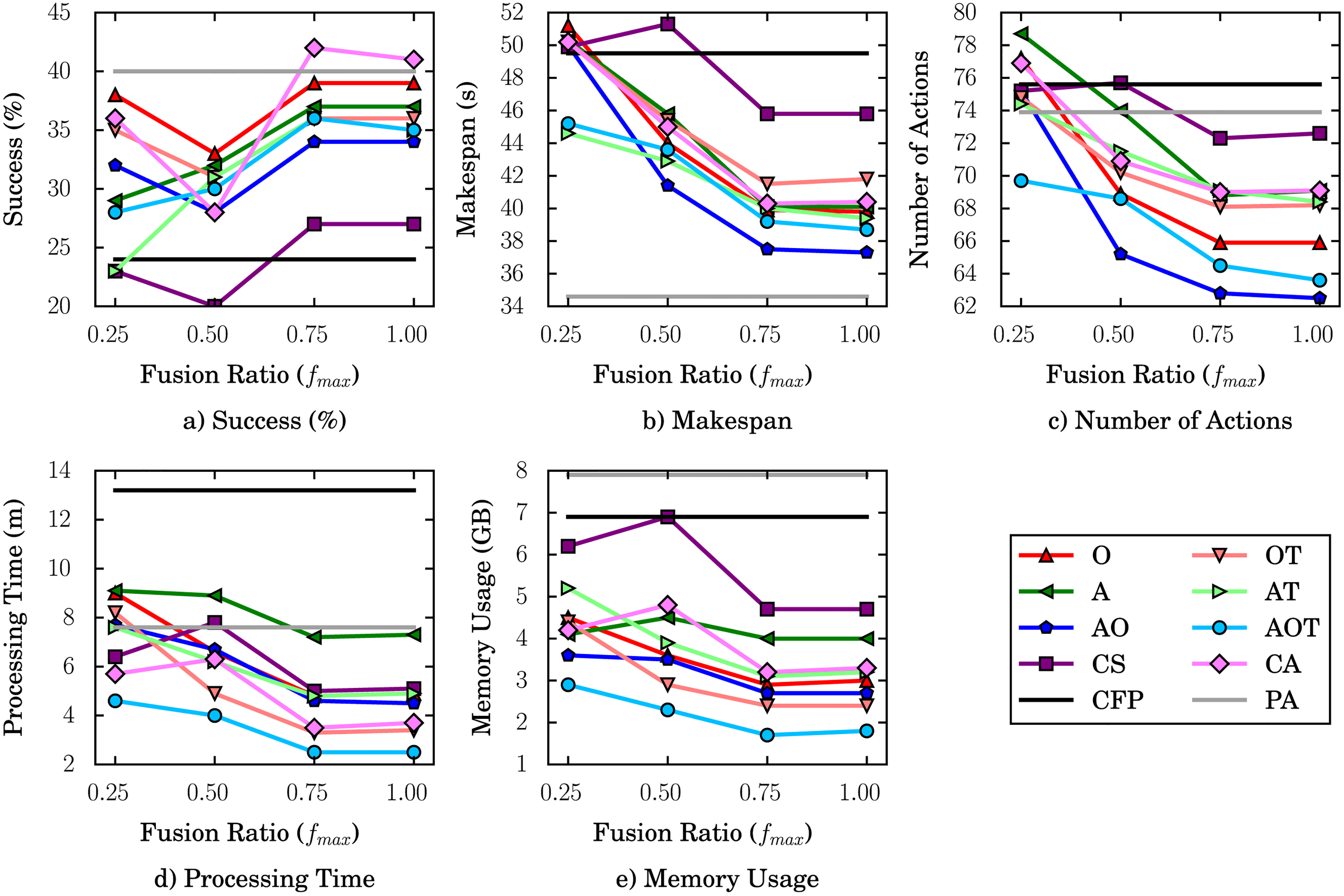
The Action-Object (AO) heuristic produced the second best makespan and the best number of actions for
The Pareto Strength quality, which minimizes plans’ makespan and number of actions, was evaluated across all methods. The Action-Object heuristic (
The Action-Object-Temporal heuristic is the best solution to the Blocks World Domain with TFD, as it resulted in among the best makespan and number of actions; and the best processing time, and memory usage. The Action-Object heuristic is the second best, as it resulted in the best quality, but mediocre processing time and memory usage. CFP is the worst solution, resulting in the worst metrics.
The object oriented heuristics also offered the best solution to the Blocks World Domain with the COLIN planner. The top five success rates were achieved by the plan similarity heuristics, whereas only two of the top five best success rates were plan similarity heuristics when using TFD. The Object heuristic presented better results with increasing
The Object heuristic (
Blocks world with COLIN planning results
Blocks world with COLIN planning results
The Object (O) heuristic resulted in the highest success rates across all
Blocks world with COLIN (a) success, (b) makespan, (c) number of actions, (d) processing time, and (e) memory usage by fusion ratio (
All heuristics produced their maximum success rates for the highest
The Object heuristic (
The more complex first response domain presented noisier results, compared to the Blocks World Domain. Planning Alone exceeded the processing time limit for all problems, resulting in no plans. The plan distance heuristics produced generally better results for intermediary
The Coalition Similarity heuristic (
First response planning results
First response planning results
Many methods performed best for the intermediary
First response (a) success, (b) makespan, (c) number of actions, (d) processing time, and (e) memory usage by fusion ratio (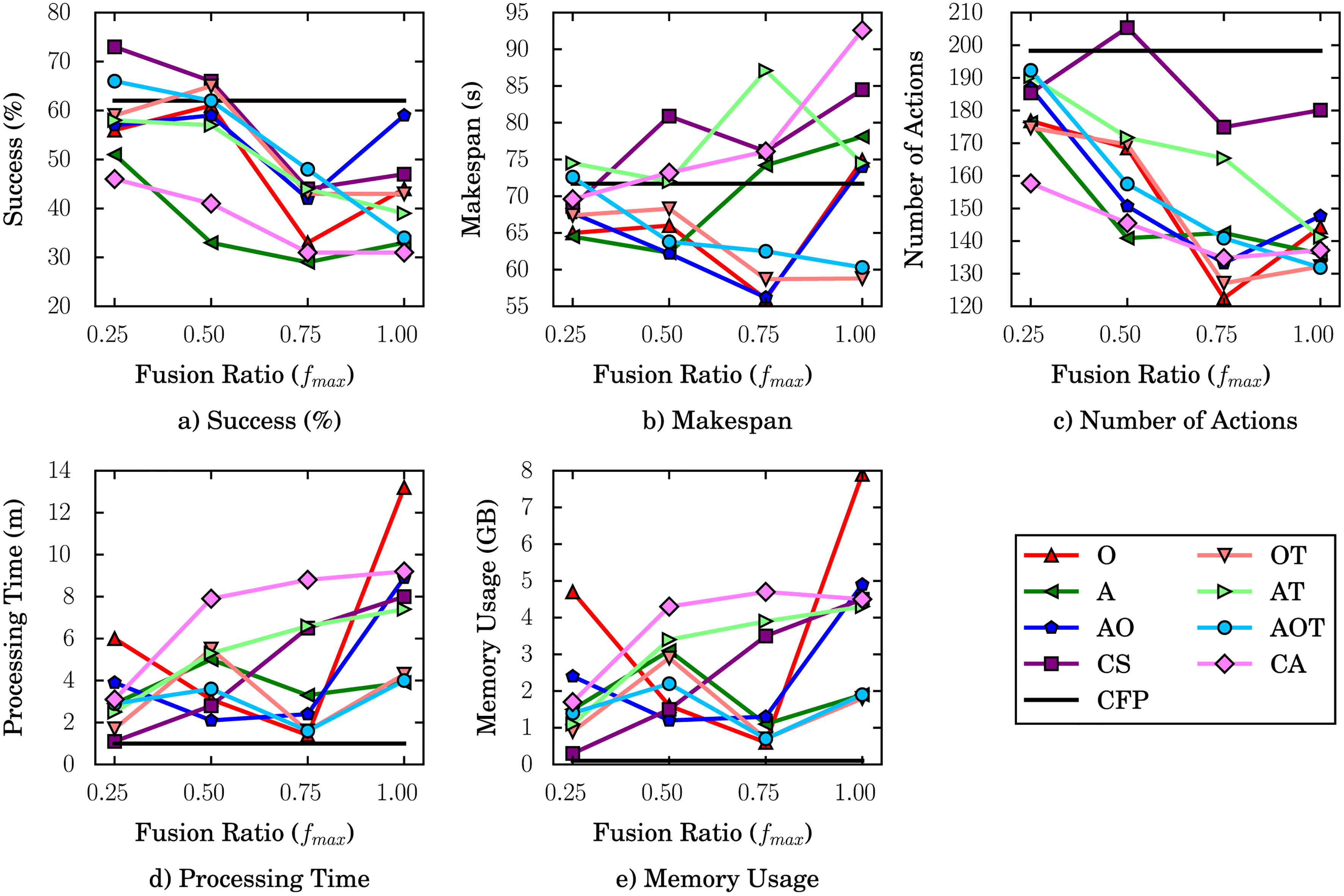
The Object heuristic (
The best performing method was the Object (O) heuristic with
The proposed heuristics significantly outperform the baseline methods in the resulting plans’ quality and offers a better trade-off between quality and processing cost. While other existing methods make constraining assumptions, such as requiring serial plan execution, or requiring a specific planning algorithm, the framework is demonstrated to outperform baselines on both planning algorithms used.
The first response domain has an underlying routing problem, in that robots must travel across locations in order to perform their location-dependent tasks, such as navigating to a victim before triaging said victim. The randomly distributed victim locations result in a wide variety of complex routing problems, which is a possible cause for the larger variance across the various metrics when compared to the Blocks World Domain. Faster routes involving multiple short hops generate more actions than slower routes with fewer long hops. The number of possible alternative routes across the locations’ graph connecting the multiple points of interest is larger. Allocating different tasks to different robots can result in plans with a wider variety of makespans and number of actions, due to the fact that the allocated robots perform different paths to achieve their tasks, depending on where the robots were initially located. The distances traveled by robot arms are more uniform in the Blocks World Domain, because there are only two block sizes.
The hypothesis
Hypothesis
The third hypothesis,
The final hypothesis,
The manuscript extends and applies distance heuristics
The heuristics contribute to a more informed task allocation. Coalition formation models operate on robot and task capabilities, but lack planning domain information. The plan distance heuristics use relaxed plans in order to introduce planning domain information into the task allocation process. The added planning domain information supports more accurately estimating the value of fusing coalition-task pairs and results in improved task allocation. The heuristics also contribute to estimating coupling between planning problems. Determining the exact problem coupling by computing the treewidth of the agent interaction graph is an NP-hard problem [3]. The heuristics offer an approximate alternative, which is polynomial on the number of actions and objects in the problem’s plan:
The Task Fusion algorithm considers only pair wise (binary) coalition fusion in order to avoid the complexity of evaluating all possible coalition combinations. Extending the algorithm to support
Conclusion
Plan distance heuristics were introduced to provide a better balance between plan quality and the required processing resources, when planning for multiple heterogeneous robots in complex real-world time-sensitive domains. The heuristics estimate plan distance as a proxy for estimating coalition-tasks coupling. The level of coupling determines which coalition-tasks pairs to fuse, after robots are grouped into coalitions and allocated tasks. Fusing coupled tasks improves plan quality by increasing cooperation between robots, while separating loosely coupled tasks reduces plan synthesis cost. The heuristics use lists of logical object instances, extracted from the plans’ action description arguments, to reveal nuances ignored by existing Task Fusion heuristics.
The plan distance heuristics combine aspects of problem coupling and plan distance estimation to improve task allocation. The heuristics generally outperform baselines in both plan quality and computational costs. First response is an example domain that is time-critical. The small reductions in plan execution time can make the difference between mission success or mission failure. The cases in which the heuristics do not perform strictly better still offer a better balance between plan quality and computational cost. As a result, larger planning problems, which involve more tasks, robots, and logical objects, can be solved.
Footnotes
The full source code will be made available at the time of publication. The problem set is available at
Acknowledgments
This work was partially supported by NSF grant #1723924.
Authors’ Bios