
Abstract
Human fall detection is a subcategory of ambient assisted living. Falls are dangerous for old aged people especially those who are unaccompanied. Detection of falls as early as possible along with high accuracy is indispensable to save the person otherwise it may lead to physical disability even death also. The proposed fall detection system is implemented in the edge computing scenario. An adaptive window-based approach is proposed here for feature extraction because window size affects the performance of the classifier. For training and testing purposes two public datasets and our collected dataset have been used. Anomaly identification based on a support vector machine with an enhanced chi-square kernel is used here for the classification of Activities of Daily Living (ADL) and fall activities. Using the proposed approach 100% sensitivity and 98.08% specificity have been achieved which are better when compared with three recent research based on unsupervised learning. One of the important aspects of this study is that it is also validated on actual real fall data and got 100% accuracy. This complete fall detection model is implemented in the fog computing scenario. The proposed approach of adaptive window based feature extraction is better than static window based approaches and three recent fall detection methods.
Introduction
Human falls are a major problem of elderly people it causes severe physical and mental problems to the elderly. Physical problems are bone fracture, trauma, physical disability, etc. and mental problem includes fear of falling, fear of being dependent on others, fear of doing physical activities, etc. According to The global fall detection systems market, the fall detection market is anticipated to be valued at US$ 600.0 Mn by the end of 2029, expanding at a CAGR of
Human fall detection can be defined as a procedure to detect falls automatically using some algorithms in real-time and it sends information of fall to the family and medical caretakers. The fall detection system uses three major types of sensors wearable sensors like accelerometer, gyroscope, and magnetometer; ambient sensors like acoustic sensors, thermal sensors, pressure sensors; and vision-based sensors like RGB, RGBD, thermal camera. Apart from these sensors, some other devices like wifi and radar are also being used for detecting falls. Extracting the sensors data followed by segmentation or window size selection then feature extraction and classification is a very common approach to detect the falls. The segmentation of sensor signals is an initial and very common step towards fall detection. Accuracy of the fall detection model also dependent on the segmentation of sensor signals. Segmentation is termed as dividing sensor signals in a specific size of sensor windows for feature extraction. These segments can be distinct or overlapping. Segmentation techniques are generally categorized into three methods activity-based segmentation, event-based segmentation, and Sliding window-based segmentation [3]. Activity-based segmentation divides the sensor signal based on the start and end of activities, event-based segmentation divides the sensor signal based on some event, and sliding window-based segmentation extract window data from a continuously moving window. Generally sliding windows are overlapping and the degree of overlapping is defined by the researcher.
Many researchers have used sensor window size 1 s to 6.7 s while some of them have used larger window sizes such as 10 s and 12.8 s [3, 4, 5, 6]. It is necessary to choose window size intelligently because if the window size is very small, then it will not capture all information on human activity and if the window size is very big then it can contain information on multiple activities which can lead to misclassification. A large amount of work has been done on the fixed size of the sensor window but it has been seen by many researchers that the timing of physical activity differs from person to person hence fixed window size can misinterpret activities so it is required to select the window size dynamically. The size of the sensor and the use of overlapping or non-overlapping windows are dependent on application type. Various studies have been done on analyzing the effect of window size on classification performance and some of the researchers proposed algorithms to decide dynamic window but still, these literatures are vague and insufficient to extract a general conclusion.
In the proposed work, an adaptive sensor window size based feature extraction has been done. For calculation of the adaptive window, a function has been defined which calculates the sudden change in the sensor data or continuous change in the sensor data. Then five features have been extracted based on these dynamic sizes of the windows. For classification purposes, one class classification based support vector machine has been used due to its usability in the areas where examples of negative classes are either not available or available in very fewer amounts. To avoid getting an imbalanced model using binary classification where data of only positive classes are available, the concept of anomaly identification was given by Moya et al. [7]. The fall detection area is also required one class classifier because real fall data is available in very few amounts and mostly the available fall data is lab simulated data. For classification, an anomaly identification based support vector machine with an enhanced version of the chi-squared kernel has been used. The complete fall detection model is implemented in an edge computing scenario.
Literature review
Human fall detection is a concept which detects falls using various sensors like wearable sensors [8, 9, 10], acoustic sensor [11, 12], camera [13, 14, 15], pressure sensor [16]. Even some devices like wifi [17, 18] or radar [19, 20] are also being used in some studies for fall detection. Fall detection methods can be generally divided into two categories: Thresholding based fall detection and machine learning based fall detection. In thresholding based fall detection [9], some threshold value is decided. Sometimes there are two threshold values: lower threshold and upper threshold. If values of magnitude are out of the threshold range then fall is detected. Machine learning based fall detection systems are based on the use of classifiers [21, 22] or deep learning techniques [20, 23]. While using classifiers, features are calculated explicitly and in deep learning techniques, features are calculated using intelligent techniques. In accelerometer-based fall detection generally, time domain-based features, frequency domain based features, and statistical features are calculated.
Feature extraction
Feature extraction or feature calculations are important steps of the fall detection task. During the process of feature extraction, data sampling or data segmentation is an important step. Some fall detection methods have used overlapping segments while some of them used non-overlapping segments. There are a vast variety of methods have been used for fall detection. In accelerometer-based fall detection researchers have worked on a variety of window sizes. Some research [24, 25, 26] have used 1–2 second window sizes while some researchers [27, 28, 29] have used more than 5-second window size. Most of the researchers have used their own collected dataset while some of them have used public datasets also. We will discuss some feature extraction methodologies mentioned in research papers. In 2016 Kuang et al. [27] proposed an accelerometer based fall detection system. After passing the signal to fifth-order Butterworth filter, they segmented the signal into 9-second window size then calculated sum vector feature, rotational angle feature, slope feature, magnitude of acceleration in xy-plane feature, and standard deviation of the sum of vector feature. After using support vector machine classification for fall detection, they achieved 95.76% sensitivity and 93.28% specificity. In 2016 Hsu et al. [24] proposed a feature extraction based fall detection system using accelerometer data. They calculated six features Aom, Ali, Agvh, Agvl, Agmod, Gca using 2-second window size. After applying SVM based classification they achieved 96.67% sensitivity and 95% specificity. In 2017 Prayook et al. [28] proposed accelerometer and barometer based fall detection. They used 6-second window size around the reference point (peak just after fall activity). They extracted 3 features pressure shift, middle slope, and post-fall slope. They achieved 100% recall with their limited self-collected dataset having 30 simulated falls. In 2017 Saadeh [25] proposed a fall detection system having high accuracy and low latency. They used 1-second time window for feature extraction. The proposed method was based on thresholding based fall detection. With their method, they achieved 98.1% sensitivity and 99.2% specificity. In 2018 Chen et al. [26] proposed a wristwatch accelerometer based fall detection system. They used a combination of ensemble stacked autoencoder and one-class classification based convex hull for fall detection. They used ensemble stacked autoencoders for unsupervised feature extraction rather than artificial feature extraction. They used three sliding windows having a size of 2 second with 50% overlapping. They achieved 98.92% sensitivity and 96.09% specificity with their approach. In 2019 Kijung et al. [30] proposed accelerometer and depth sensor-based fall detection. They extracted seven motion features, i.e., acceleration in three directions, the magnitude of acceleration vector, and differential acceleration in three directions from accelerometer data and nine features height, width, depth, area, ratio of height to width, ratio of height to depth, differential of height, differential of width, and differential of depth from depth sensor. Using random forest classifier they achieved approximate 90% accuracy. In 2019 Faisal et al. [29] proposed activity aware fall detection system using accelerometer data. They used fixed non overlapping 10 second window size. They have calculated total 18 features from accelerometer data. After applying SVM, KNN and Random forest classifier they found highest 99.80 accuracy with random forest classifier. All the above mentioned papers on fall detection have used static window size based feature extraction. Features are time domain-based features, frequency domain based features, statistical features and in some papers authors have proposed their own calculated features.
Effect of segmentation
Segmentation and sampling rate have a significant impact on the accuracy of fall detection systems but limited studies are available on the effect of sampling rate and segmentation on fall detection. A major part of these studies is based on the effect of segmentation and sampling in human activity recognition but very rare case studies are exclusively on fall detection. So the techniques which are discussed here are based on activity recognition.
Some researchers who have studied the impact of segmentation or sampling rate on activity recognition have used different datasets, different environments so the results of their studies are also conflicting. In 2014 Fida et al. [31] have studied the effect of window length on accelerometer-based activity classification. They used the nearest neighbour classifier to classify the activities. They found that the 2-second window size was enough to classify activities in real-time. In 2014 Oresti et al. [3] also studies the impact of window size on human activity recognition. They analyzed 33 types of activities in their method. They used the decision tree classifier, KNN classifier, Naive Bayes classifier, and nearest centroid classifier in their study. They found that 1–2 second window size achieved the highest accuracy and precision. In 2015 Benish et al. [6] also studied the effect of different window sizes on activity classification. They used different window sizes 0.5-second, 1-second, 1.5-second, 2-second, 2.5-second, and 3-second to study the impact of window size on classification accuracy. They calculated 22 time-based feature vectors. They used five classifiers, i.e., decision tree, Support vector machine, KNN, Naive Bayes classifier, and multilayer perceptron to analyze the performance of the different classifiers with different window sizes. They found that average window length from 1-second 1.5-second yields the best results on all classifiers. In 2016 Baris et al. [32] analyzes the effect of sampling rate and window size on activity recognition. They collected the data using an 80 Hz sampling rate and 5-second window size. Then, they resampled that data to 40 Hz, 20 Hz, 10 Hz, and 5 Hz by using 4 s, 3 s, 2 s, and 1 s window sizes. They found that both accuracy and CPU utilization increases with an increase in sample rate. With a fixed sample rate, CPU utilization decreases with an increase in window size. In 2016, Sulaimon et al. [33] analyzed the effect of window length on the accuracy of human activity recognition. They used three window lengths: 32, 64 and 128. They calculated the time domain and frequency domain based features. They used three categories of datasets and four types of classification algorithms, i.e., J48, Naive Bayes, PART, and KNN. They found that the use of 128 length window size achieved higher accuracy and took the lowest time to train the classifiers. They also concluded that the length of the window is not significant for the training and evaluation time of the classifier but the size of samples greatly affects these two parameters. In 2017 Anzah et al. [34] have studied the effect of sampling rate and window size on the accuracy of human activity recognition system. They used weighted least square regression model to recognize activities on various windows size and various sampling rates. They found that 10 second window size along with 50 Hz sampling rate performs better than other combinations for Human activity recognition. In 2017 Putrq et al. [35] analyzed the impact of window size on accelerometer-based fall detection in a supervised machine learning environment. They analyzed two types of sliding window method: overlapping and non-overlapping windows. Two supervised learning algorithms SVM classifier and KNN classifier was used by them. They found better F-score in 2-second non-overlapping window size and better precision at 25% fixed overlapping window size. According to [3, 35] the accuracy of the fall detection system or activity detection system performs better in 1–2 second window size. In [34] effect of sampling rate along with window size was analyzed.
Adaptive window segmentation
Apart from these studies, some researchers have proposed an adaptive and dynamic window approach for activity recognition. In some research papers fall activity is also part of activities considered but we have not found any dynamic signal segmentation approach which is exclusively based on fall detection so we will discuss the researches which have used adaptive window based feature calculation for human activity recognition. In 2011 Javier et al. [36] proposed a dynamic sliding window approach for human activity recognition. Their dynamic window calculation step was performed at every step. They found that their method performed very well on all classifiers. In 2016 Noor et al. [37] proposed an algorithm for activity recognition that uses adaptive sliding window approach. In addition to static and dynamic activities author also considered transitional activities. In their work, the transitional activity detector classifies static or dynamic activity from transitional activities using a fixed-size sensor window. When transitional activity was found, adaptive window size was applied and classified using transitional activity classifier. The adapted window size was calculated using the probability of a segmented signal belongs to some activity. They achieved an overall 95.5% accuracy using this approach. In 2016 Qin et al. [38] proposed the detection of window starting position dynamically. They have proposed a multivariate online change detection algorithm to detect the starting position of the window dynamically. They have calculated eight time-domain features and six frequency domain features. They compared the performance of their method on Random forest classifier, KNN classifier, J48 classifier, Naive Bayes classifier, Support vector machine, and multilayer perceptron. They found that their method performed better than non-overlapping segmentation and 50% overlapping segmentation on all classifiers. In 2019, Congcong et al. [39] presented a method for the adaptive sliding window for human activity recognition. Their focus was on the activities performed on wheelchair so activities were limited. They used multivariate Gaussian distribution to detect the difference between the signals. They proposed two protocols, one for window expansion and one for window contraction to calibrate the size of the window according to activity length. Their proposed method performed 15.3% better in static activities and 6.4% and 24.5% improvement in the flat and rough surface. In 2019 Samaneh et al. [40] presented a paper in which they used CPD based signal segmentation for activity recognition for which data was collected by 29 smart homes. They achieved 7.59% increase in accuracy and 6.69% increase in f-measure when compared with conventional window-based methods. In overall comparison it is very difficult to compare the results of one method with other methods because every method has used different datasets for implementing their proposed methodologies. Even some of the researchers have used a very small dataset having a limited number of activities.
Adaptive window based fall detection in fog computing
Fog computing based framework
The whole fall detection task has been implemented on fog computing scenarios [41] as shown in Fig. 1. The smartphone works as a sensor device. The data collected by smartphone is transmitted to the local fog node where MATLAB desktop software resides which receives the data transferred by smartphone. At this fog node data preprocessing, adaptive window based feature extraction, and classification is performed. After fall prediction, information of fall is sent to the local caretaker using the local wifi network. The data of five features is also sent to the cloud node using an internet connection where an updated fall detection model resides for global fall prediction. Figure 2 shows the general framework of fall detection in fog computing with multiple sensor nodes, fog nodes, and one cloud node. Whenever multiple sensor nodes are spread over a large geographical location then the sensor node communicates with their nearby fog node then the fog node communicates with the central cloud center. According to the prediction done at the cloud node, the fall notification message will be sent to the caretaker to act accordingly. Prediction can be done in local fog node as well as in cloud node.
Sensor node. The sensor node is responsible for sensing surrounding information. In this paper, a Smartphone embedded with an accelerometer has been used as a sensor node. A MATLAB mobile application is used here to record acceleration in x, y, and z-direction using 50 Hz frequency. This app continuously sends this unprocessed raw data to the fog node. In the smartphone, only data collection process is performed to optimize battery consumption.
Fog node. Here fog node works as a transitional node between the sensor node and cloud node to reduce the amount of data transferred to the cloud. At fog node, MATLAB 2015a application is running to get and preprocess the data.
Cloud node. At the cloud node final prediction will be done. Even the data of five features are processed at fog node and local prediction is also made at fog node but five features data is also being sent to the cloud node. At the cloud node, the fall detection model is updated at regular intervals to make predictions using an updated model, and information of falls will be sent to their family members.
Proposed fall detection model.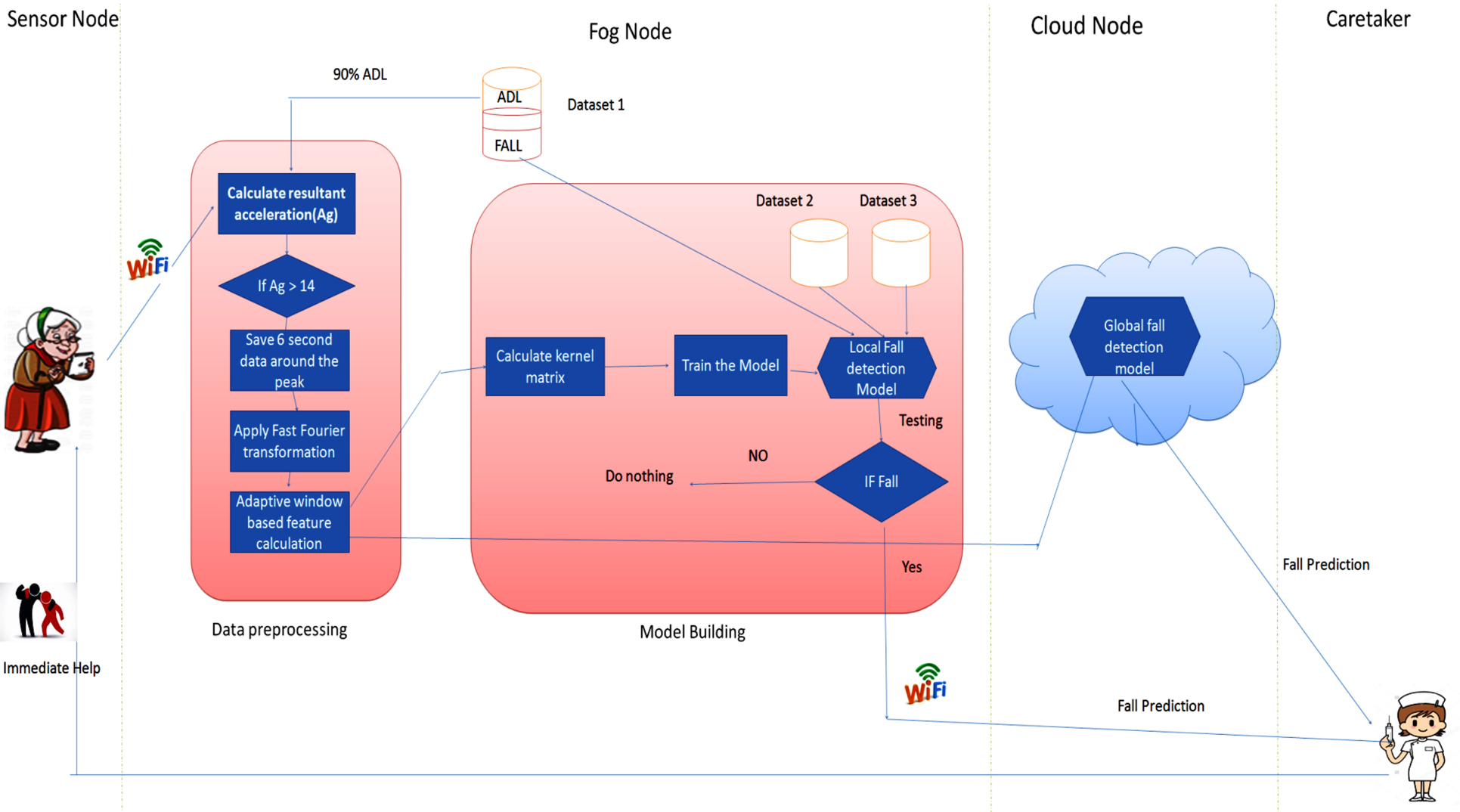
Human fall detection in fog computing scenario.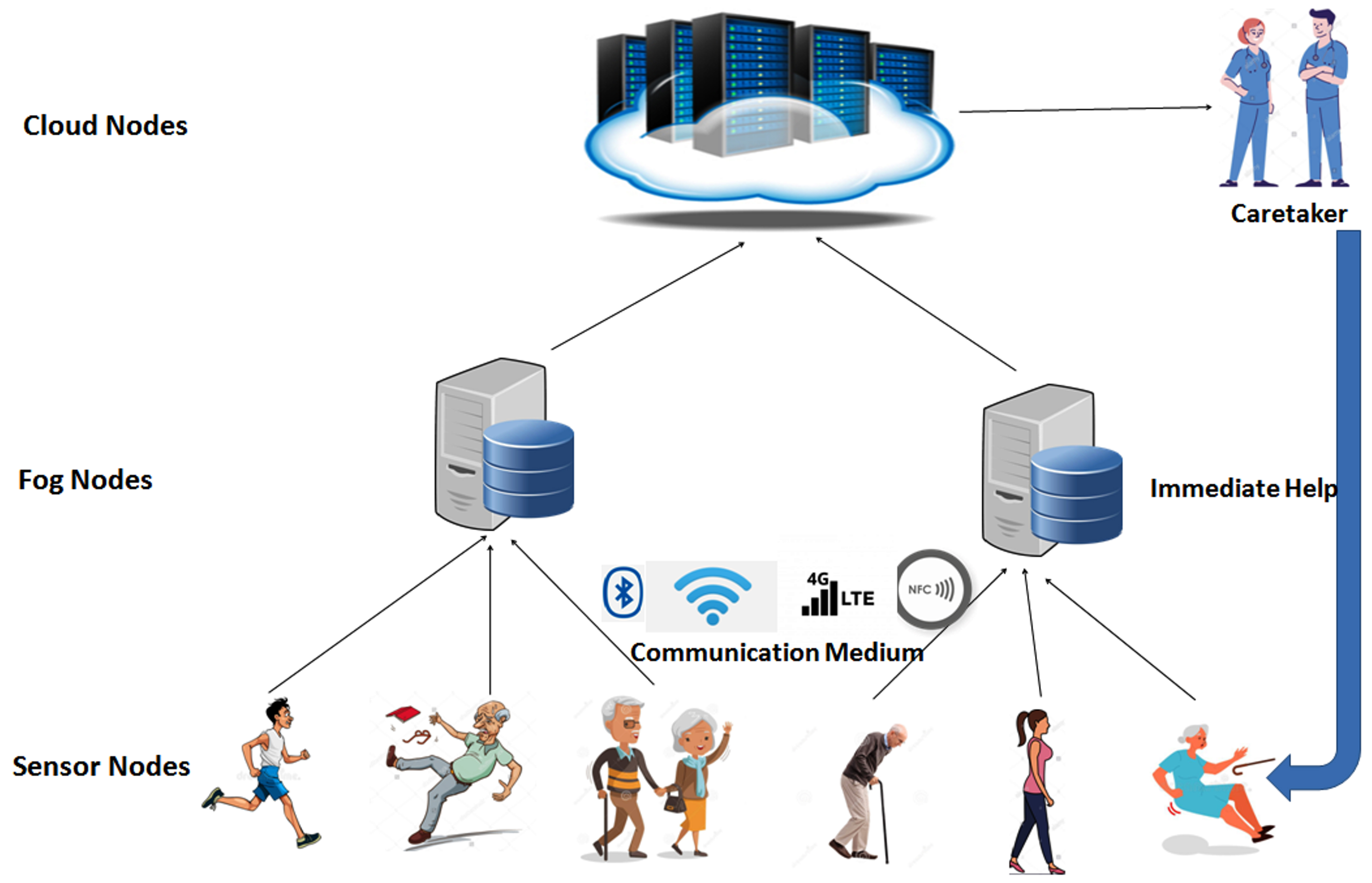
Segmentation of the sensor signal.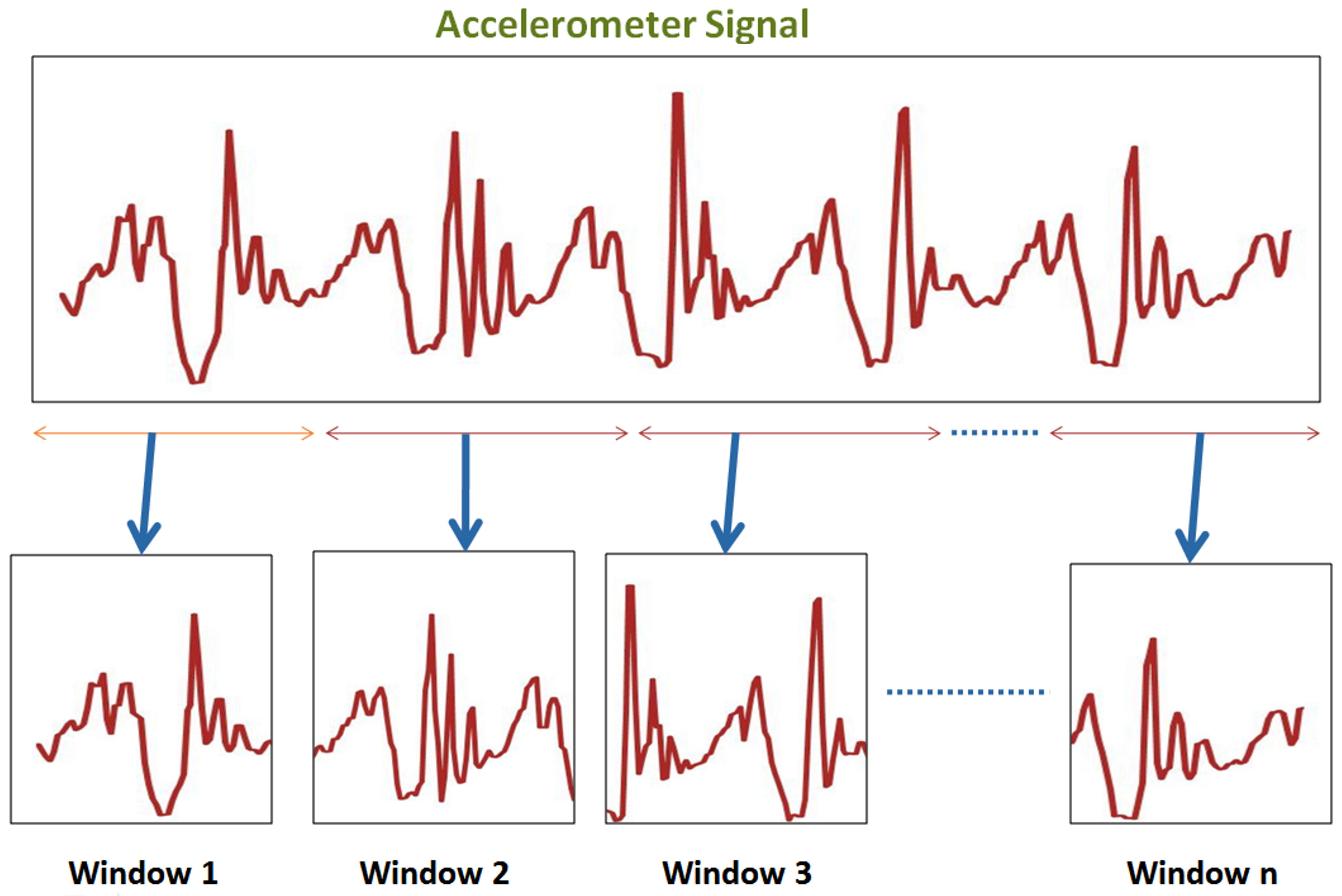
This paper is based on signal segmentation. We have proposed an adaptive window size based feature extraction for fall detection. A function has been defined which determines the window size dynamically. Based on the window size, we have calculated five features that will be used for building the fall detection model. One class support vector machine classifier has been used for classification purposes.
Segmentation
Early human fall detection is a very imperative component of ambient assisted living. Segmentation is a process of dividing the continuous signal into specific size of window. The window is sliding over the signal component so it produces segments. The window size can be fixed or dynamic and windows can be overlapping or non-overlapping. Segmentation of the signal or dividing the signal into different windows is one of the necessary steps of fall detection. The size of the sensor window affects the performance of the classifier to a great extent. Figure 3 shows the general idea of segmentation of the accelerometer signal into different windows of some specific size.
Data preprocessing
If acceleration in
Saving data around the peak.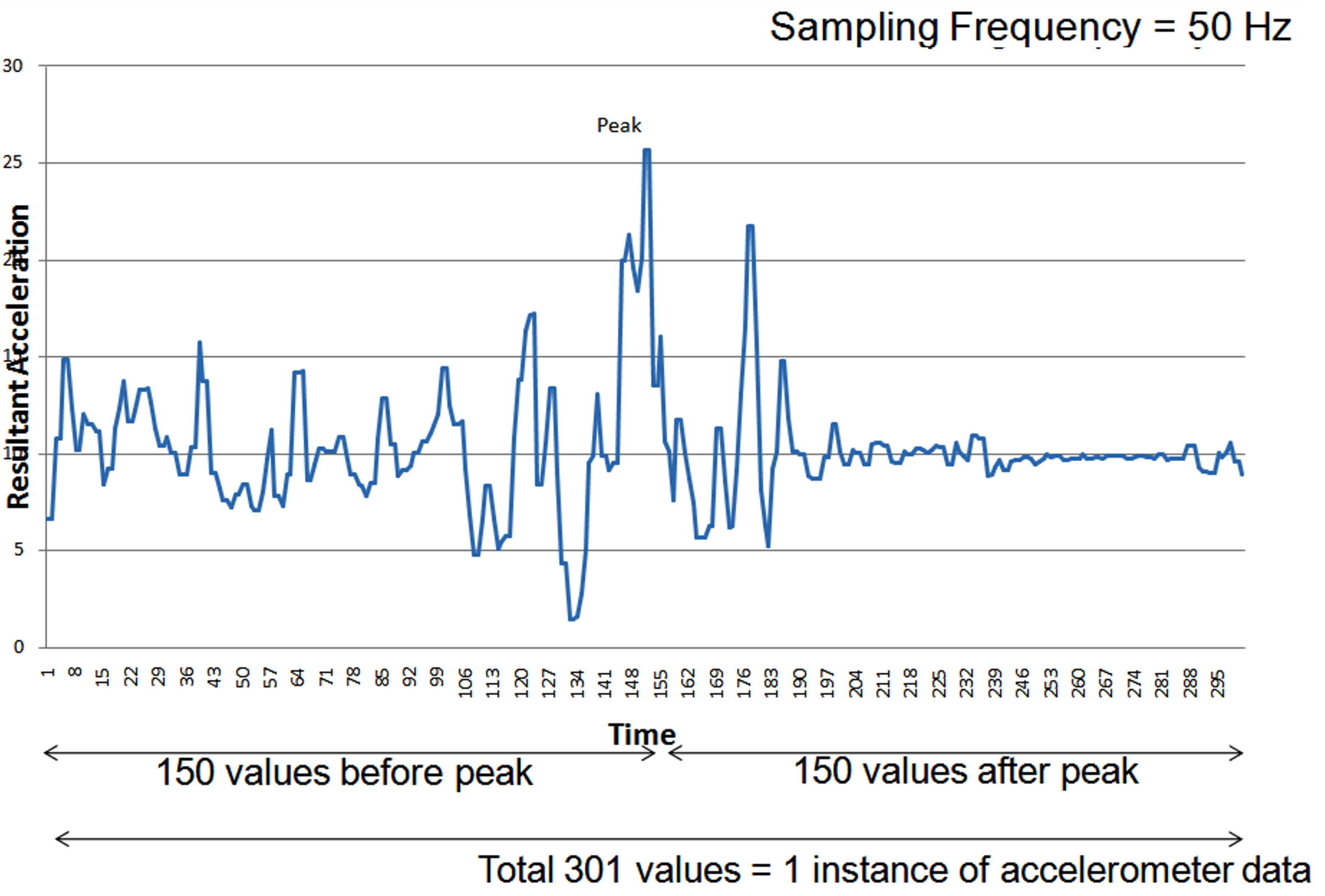
After that from continuous values of
Feature extraction is a major step in classification. The feature is a variable, extracted from raw data and contains reduced meaningful information. Feature extraction is extracting important information from a large volume of raw data. It is a process of dimensionality reduction by which an initial set of raw data is reduced to more manageable groups for processing. So we need to calculate five features for every instance of data. Before calculating features the fast Fourier transformation has been applied to all three datasets then five features are calculated as follows.
Post impact (PIm). This feature is the most important feature to discriminate Activities of Daily Living (ADL) activities from fall activities because after fall activity person is static on the ground which is not in case of ADL activities
where
Mean Frequency (MnF)
where
Median Frequency (MdF)
where
Peak to Peak distance (PtP). It is the difference between the maximum positive and maximum negative peak of the signal.
Peak to RMS (PtR). It is the ratio of the absolute value of the largest peak and Root mean square value.
These five features will be used for building the model. In this paper, we will compare static window size based fall detection and adaptive window based fall detection. To do this comparison, we need to calculate feature using some static window size as well as the adaptive window size.
In Fig. 4 it has been already discussed that 150 values before peak and 150 value after peak have been saved in one instance. So there will be total 301 values in one instance. The accelerometer data is collected at 50 Hz. So in one second 50 accelerometer values are generated hence 301 values will be generated at 6 second. Figure 5 shows the range of different window sizes in the one instance containing 301 values.
Range of different window sizes in the one instance containing 301 values.
For static window size, features will be calculated for 0.5-second window, 1-second window, 2-second window.
Suppose there is an instance
Feature extraction for 0.5-second window size.
Feature extraction of 1-second window size – MnF, MdF, PtP, PtR will be calculated from the data range
Feature extraction for 1-second window size.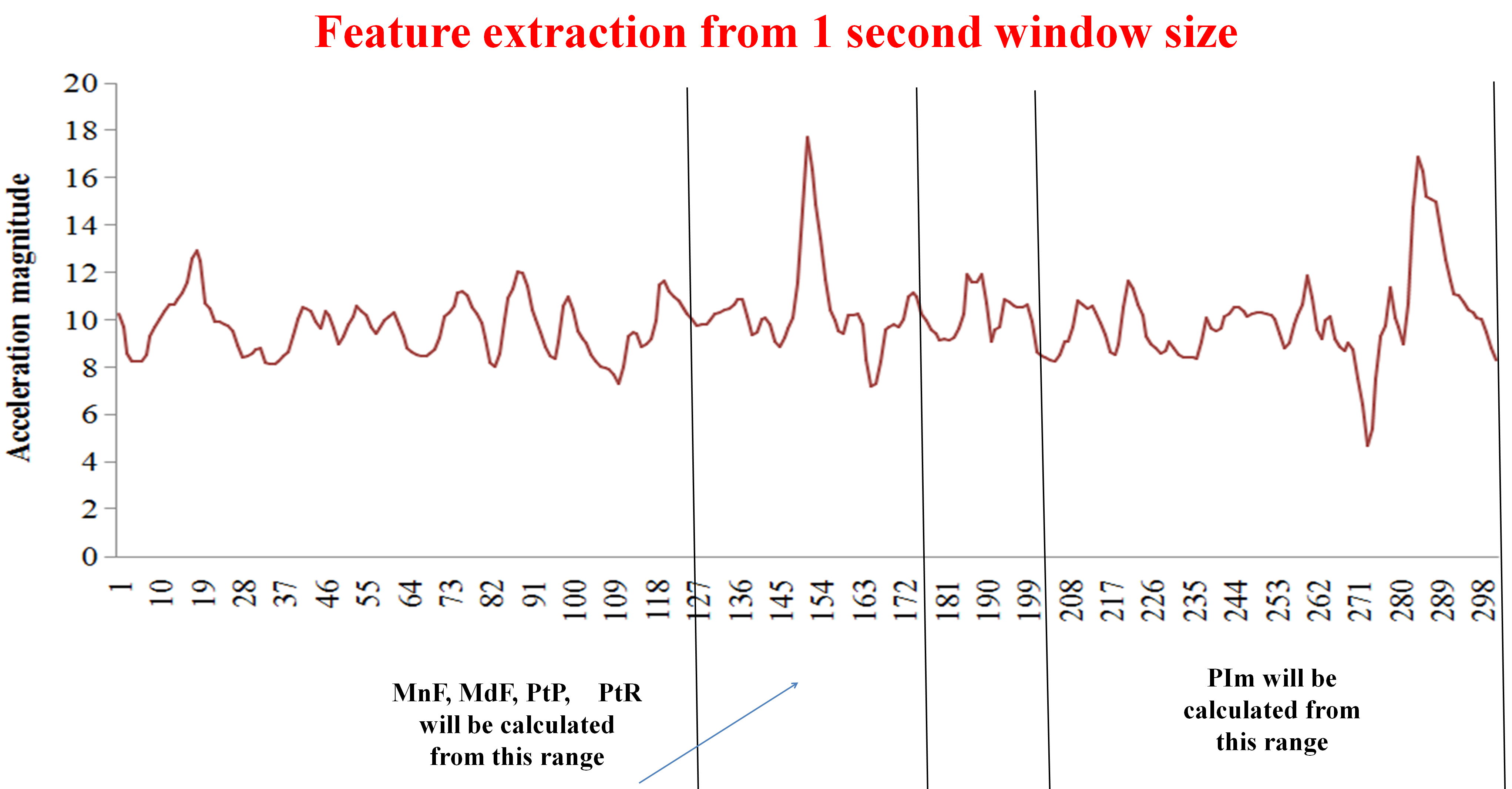
Feature extraction of 2-second window size – MnF, MdF, PtP, PtR will be calculated from the data range
Feature extraction for 2-second window size.
For feature extraction using the adaptive window at first, we have defined a function that decides window size. Algorithm 1 calculates window size dynamically and block diagram of the algorithm is shown in Fig. 9.
Block diagram of adaptive window calculation.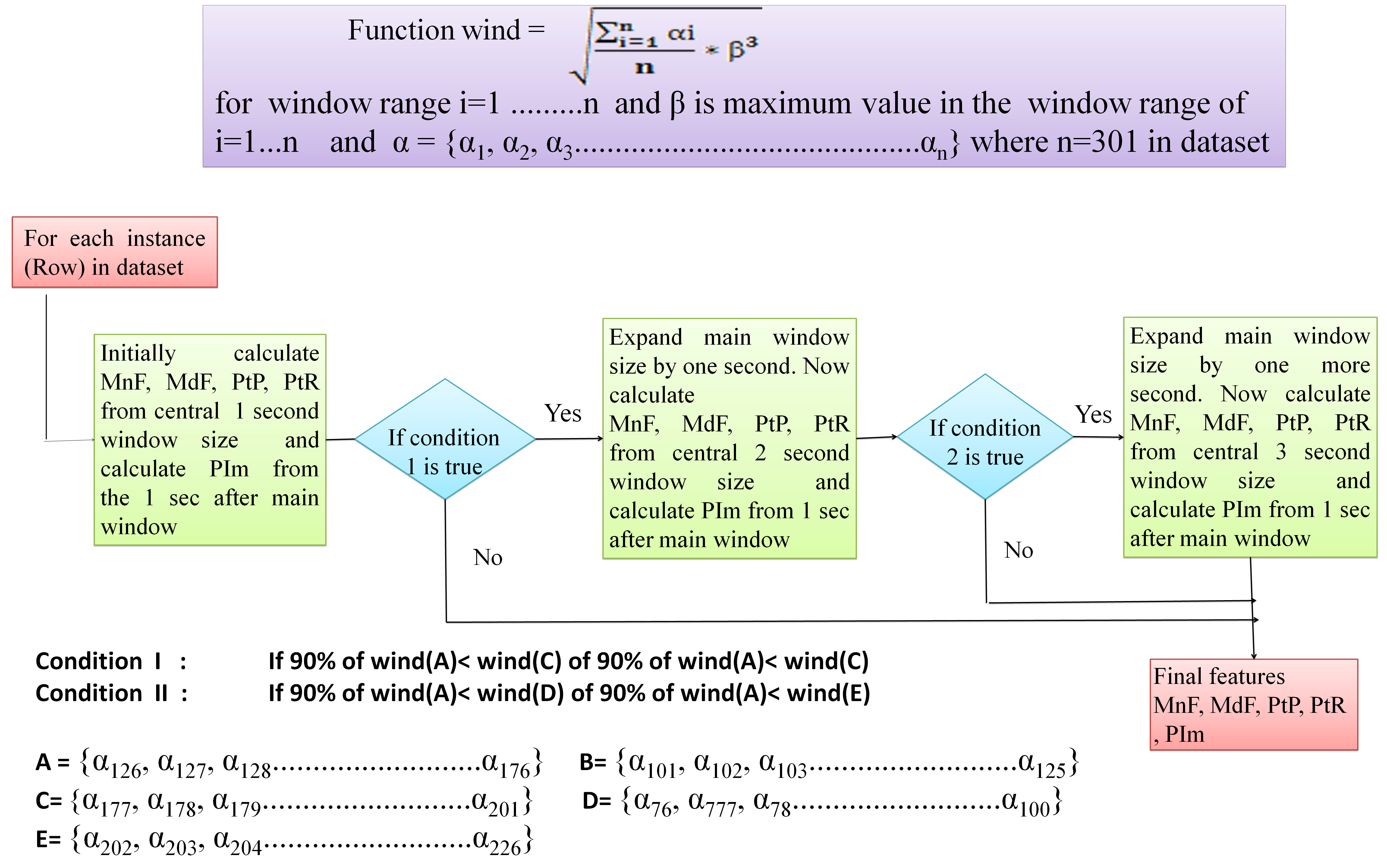
According to scholkopf [42], one class classification determines whether a test data belongs to some class or not. The data which belongs to some class is the target and which does not belong to some class is considered as an outlier. A function that determines the input space having high probability density is proposed in one-class classification. This function defines the region where most of the data lives and in that region function value is non zero otherwise zero. Consider a training set
where (.) is an operator that defines kernel calculation function. For different kernels like polynomial kernel, RBF kernel etc. (.) operator has different meanings.
To separate the dataset from the origin, following quadratic problem will be used for given training vectors
The decision function is
To calculate the kernel function we have used the method proposed in our previous paper [41]. This method is the enhancement of chi-square based kernel calculation. While training the classifier, kernel function was calculated between two instances of training data, and while testing the classifier, kernel function was calculated between training data and test data using Algorithm 2 as shown in Fig. 10.
Suppose the training data matrix is X which has five columns, i.e., five features and 7029 rows, i.e., 90% of ADL activities of dataset1. Let us define one more instance of X which Y. Now for training purpose kernel function is calculated between X and Y. For testing purpose kernel function is calculated between X and Z where Z is testing data matrix which has five columns, i.e., five features and number of rows as many in test data.
Block diagram of kernel function calculation algorithm.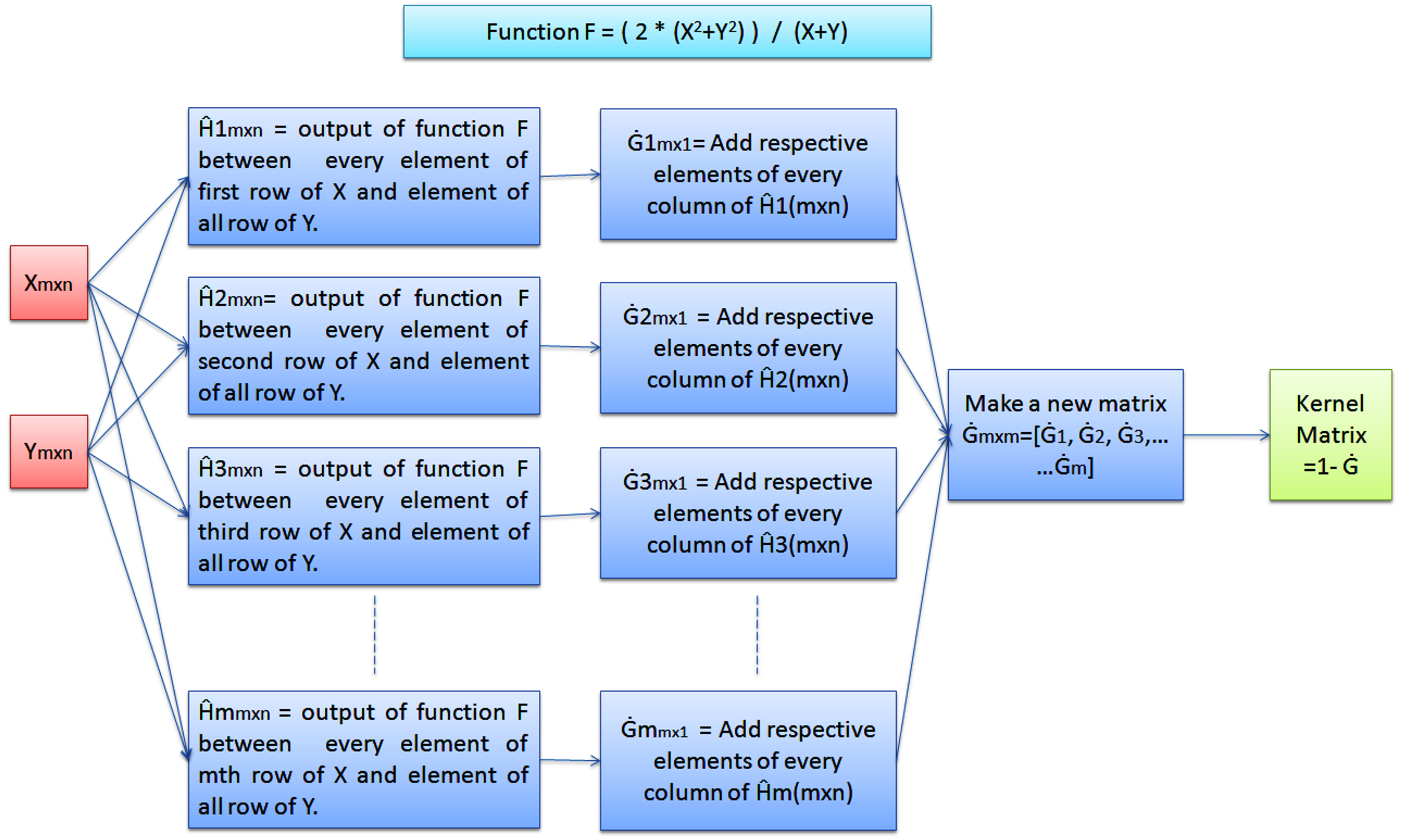
After extracting features, we have applied an anomaly identification based support vector machine (SVM) for training the fall detection model. A 10 fold cross-validation has been applied while building the model to make a robust and unbiased model. The fall detection model is trained using the ADL activities only and tested on ADL and fall datasets. Information on fall activity prediction is sent to the local caretaker using the local networks so that immediate action can be taken.
Dataset used
For building and testing the fall detection model three datasets have been used. Out of these three datasets, dataset1 and dataset 2 are publically available and dataset-3 is collected by us.
Dataset 1: The first dataset we have used is [43]. This is a publically available dataset and contains a wide variety of daily living activities and eight types of fall activities. During the collection of ADL activities, Smartphone was given to them for one and they were allowed to do any kind of daily living activities as they did in daily life. When the acceleration magnitude was greater than 1.5 g, then a new record entry of 301 values out of which 150 values before the peak and 150 values after the peak was added to the dataset. Since the sampling frequency was 50 Hz, so 301 values of acceleration magnitude consist of 6-second data of ADL activities. This dataset al so contains data of fall activities which consist of eight types of falls: forward falls, backward falls, left and right-lateral falls, syncope, sitting on the empty chair, falls using compensation strategies to prevent the impact, and falls with contact to an obstacle before hitting the ground. The fall activities were simulated in the laboratory environment. Other details of this dataset are shown in Table 1. In paper [44], it was quoted that this dataset contains a sufficient number of ADL and Fall activities for building a fall detection model.
Details of datasets
Details of datasets
Dataset 2: Another dataset, FARSEEING dataset [45] (Jochen et al., 2016). We have used this dataset because we need to verify the proposed fall detection model on real fall data. This FARSEEING dataset has real fall data. This dataset contains 208 real fall event which was recorded from 94 fallers. But the author made available 22 instances of real fall data for research purposes. From this dataset, we have used only 6-second data around the peak. Details of this dataset are shown in Table 1.
Dataset 3: Another dataset is collected by us. This dataset consists of only ADL activities. In this dataset, there are 27 volunteers. Out of that 17 volunteers are male and 10 volunteers are female. Their weight ranges between 39 kg to 77 kg, height ranges from 150 cm to 180 cm and, age ranges from 19 years to 26 years. The sampling frequency was 50 Hz. The data were collected from their smartphone of any brand. They were allowed to keep the phone in any of their pockets whether left pocket or right pocket. To collect real-time activities, the phone was given to them for 15 minutes and allowed to do any kind of activity like walking, sitting on the chair, sitting on the ground, running, climbing stairs, exercising, lifting weight, etc. When the acceleration magnitude was greater than 1.5 g, it was considered as peak and we kept 6-second data of acceleration magnitude around the peak. Since the sampling frequency was 50 Hz so we got total 301 values of acceleration magnitude in 6-second. This record of 301 values is considered an instance. So after processing all the data we got total 2821 instances of ADL activities.
Here we have used three datasets, out of which, dataset 1 and dataset 2 are publically available datasets and dataset 3 is our collected dataset. ADL activities of Dataset 1 is divided into 90:10 ratio. 90% of this data is used for training the fall detection model and 10% ADL data, Fall data along with dataset 2 and dataset 3 have been used for testing purposes as shown in Fig. 11.
Dataset for training and testing.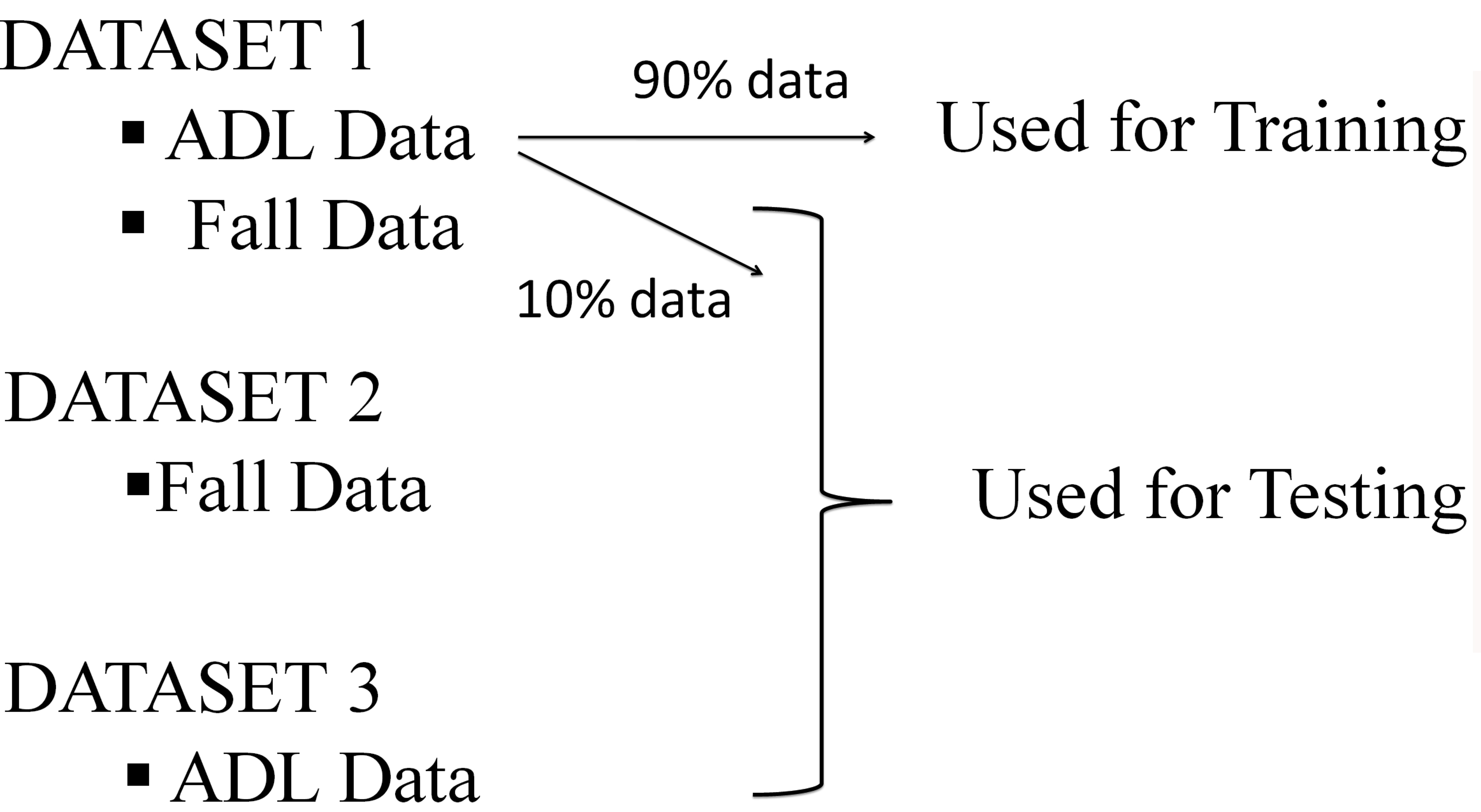
MATLAB mobile application.
After data preprocessing, five features post-impact, mean frequency median frequency Peak to Peak distance and Peak to RMS distance will be extracted. These five features have been used for building fall detection model using the support vector machine based one-class classification with kernel calculated in Algorithm 2.
Configuration: In this paper, a Lenovo K3 note Smartphone embedded with an accelerometer has been used as a sensor node. A MATLAB mobile application is used here to record acceleration in x, y, and z-direction using 50 Hz frequency as shown in Fig. 12. This app continuously sends unprocessed raw data to the fog node. In the smartphone, only data collection process is performed to optimize battery consumption. At fog node, MATLAB 2015a application is running to get and preprocess the data as shown in Fig. 13. At the fog node, all the data pre-processing tasks, feature calculation, fall detection, and initial fall prediction will be performed. We have used Thingspeak
MATLAB running at fog node.
Cloud node implemented at Thingspeak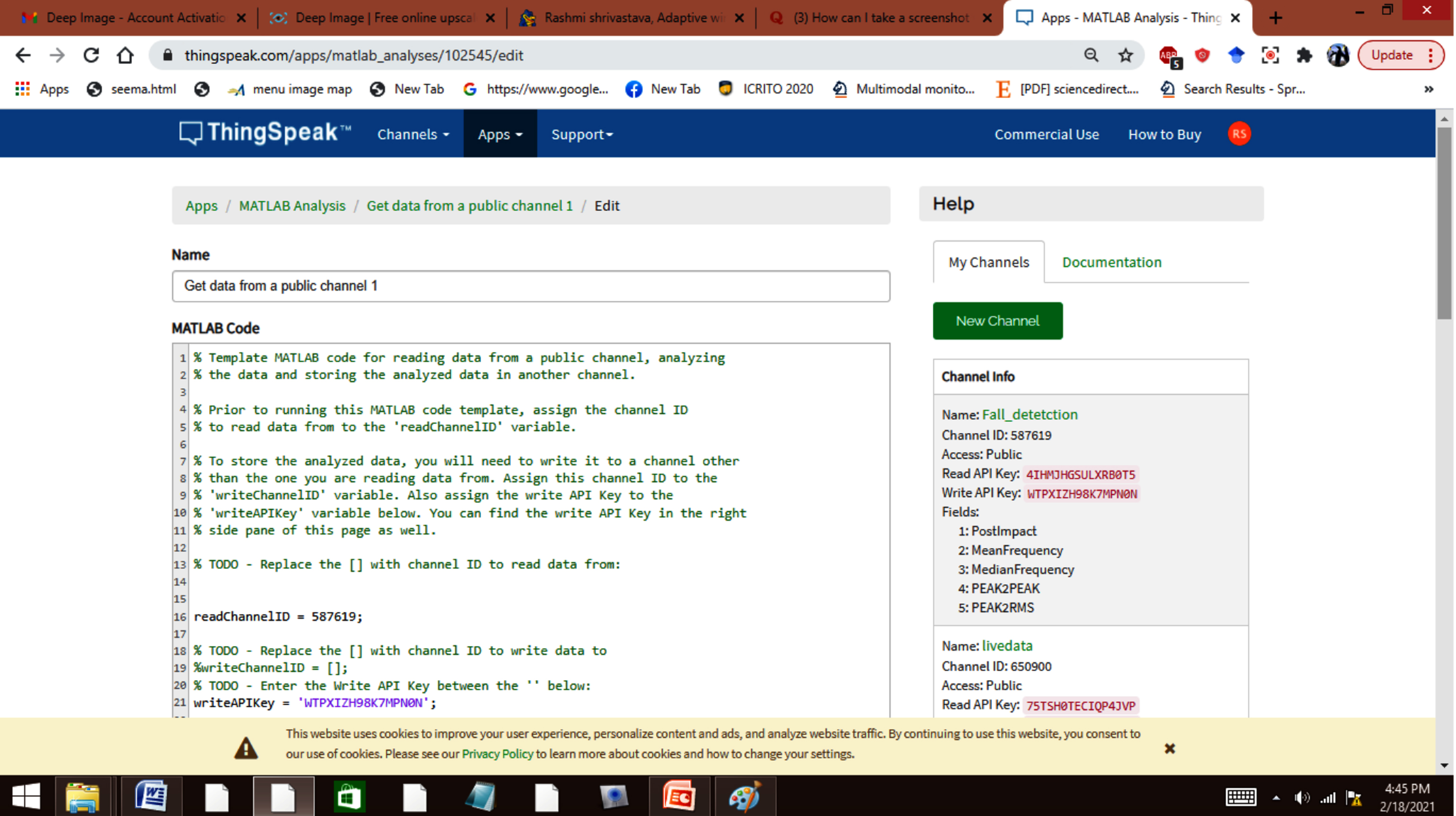
In this paper, we have compared the performance of adaptive window based feature extraction and static window based feature extraction having different window sizes for fall detection. For comparison, at first, the performance of the fall detection model using static window sizes of 0.5 second, 1 second, and 2 second have been calculated. Their performances are compared with adaptive window based fall detection in terms of sensitivity, specificity, accuracy, precision, F score, G mean, CSI, MCC, and BM.
Performance comparison of adaptive windows based fall detection with static windows based fall detection
Performance comparison of adaptive windows based fall detection with static windows based fall detection
From Table 2 we can easily see that the proposed method based fall detection performs better than other static window based fall detection in terms of sensitivity, specificity, and other performance measures as shown in Table 2. The calculation time of dynamic features are little greater in the proposed method but on the cost of the increase in performance this little time difference in millisecond can be accepted.
ADL data with small window size.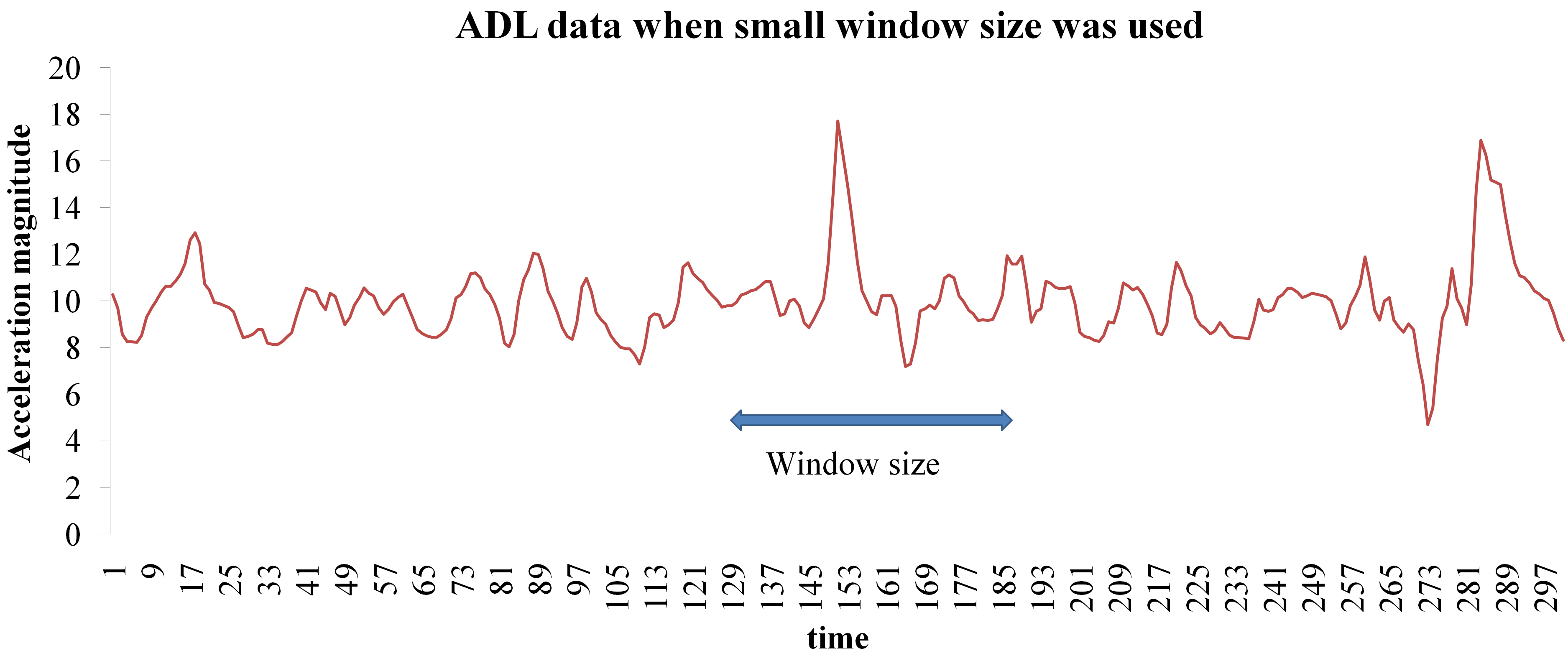
ADL data with big window size.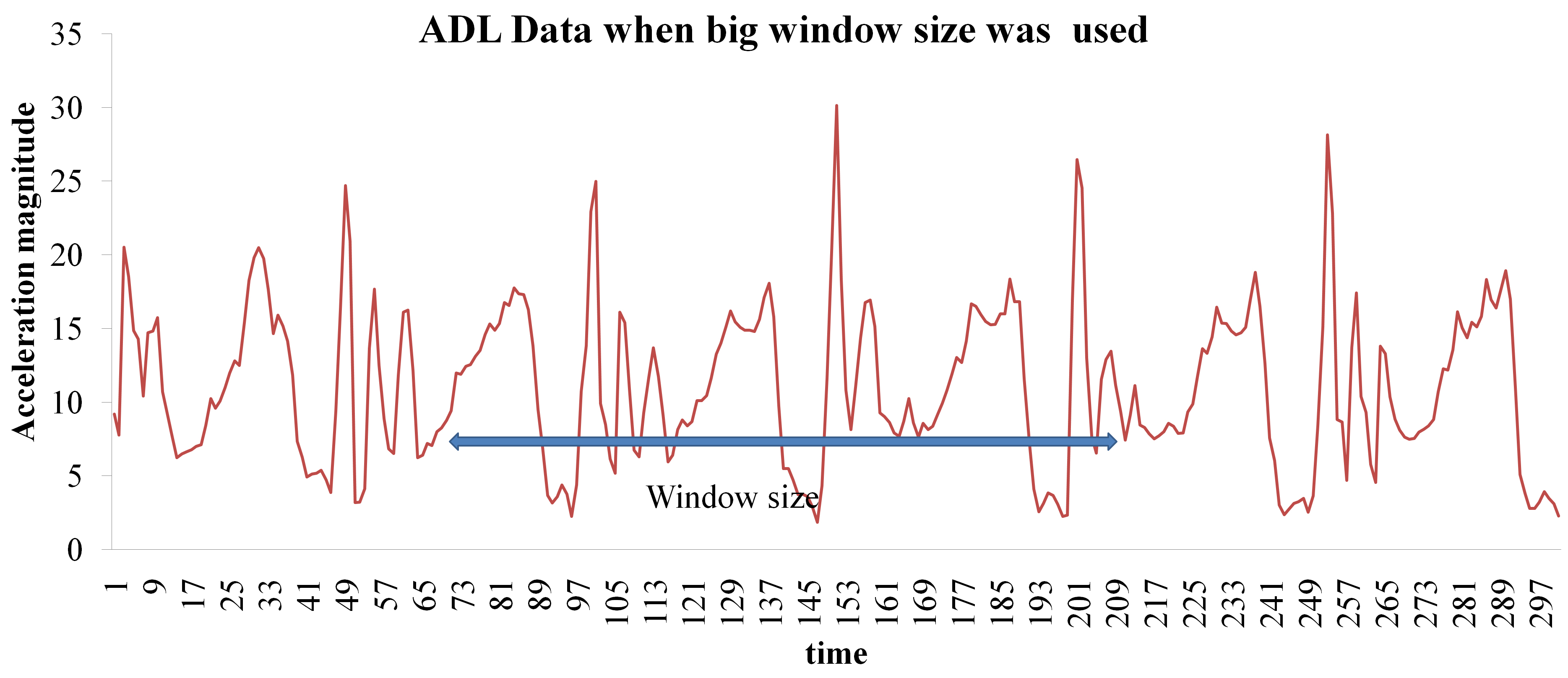
Fall data with small window size.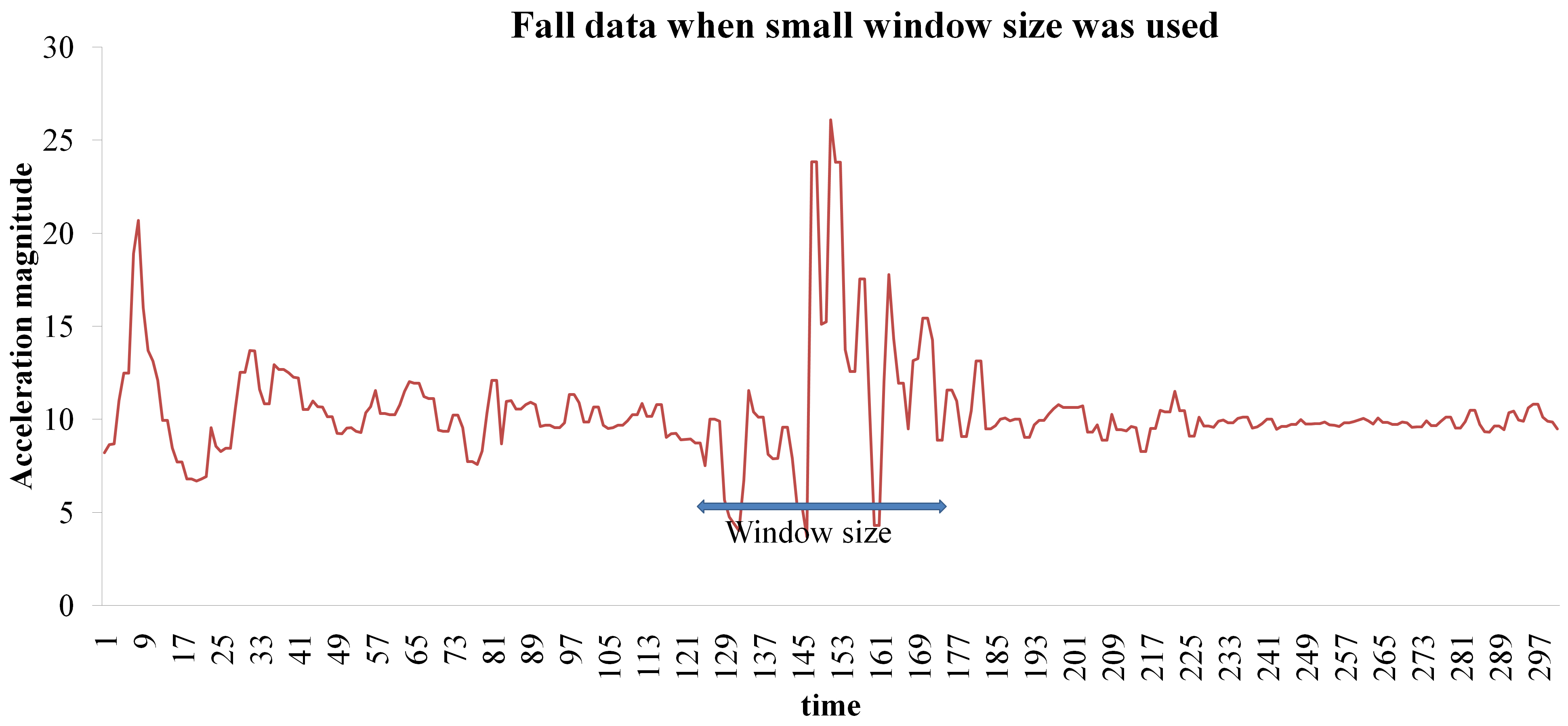
Fall data with big window size.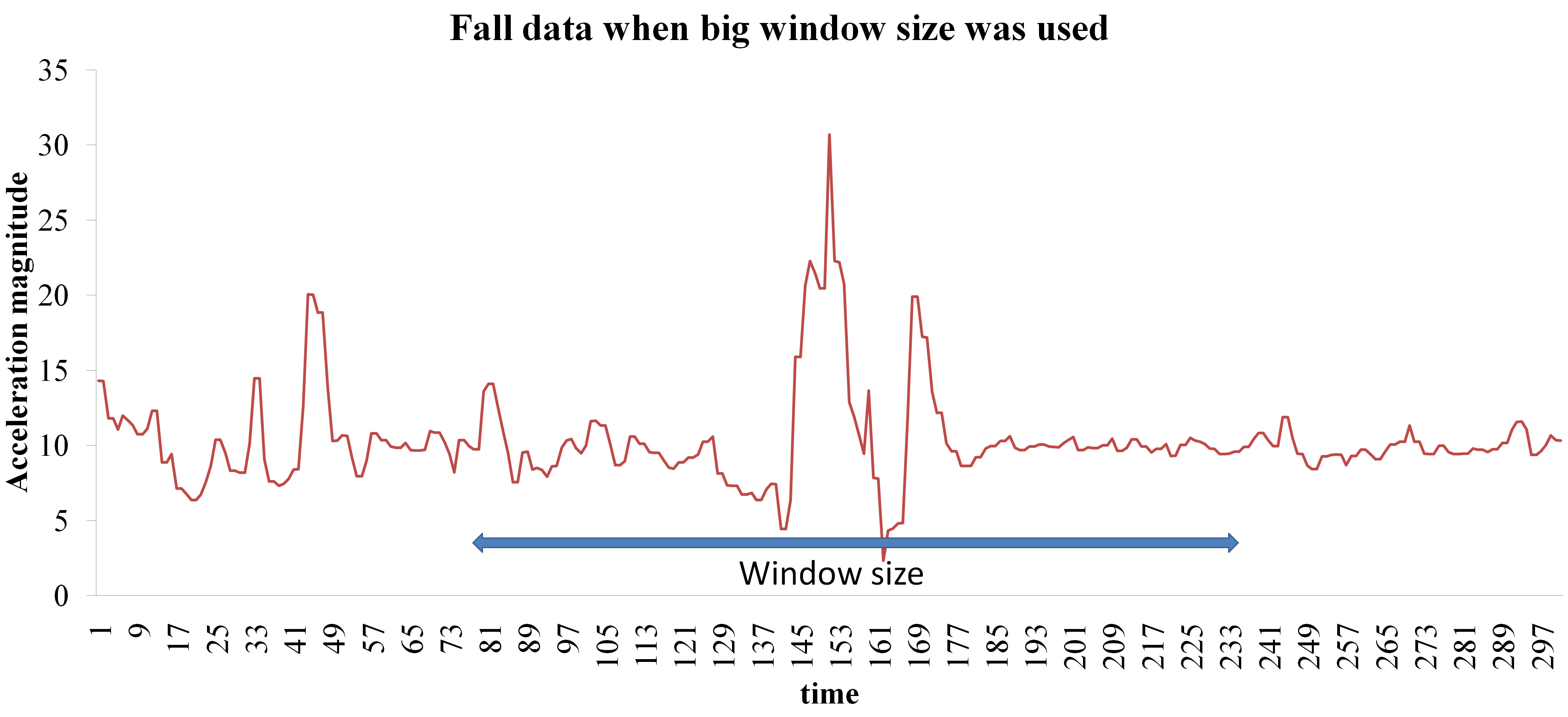
After applying adaptive window based feature extraction we can see their different window size according to the accelerometer signal. The activity signals, which spread over small time have small window size as shown in Figs 15 and 17 and the activity signals which spread over a long time have longer window size as shown in Figs 16 and 18. The activity time differs from one person to another person, Even activity time between younger people and old people also differs a lot. Young people do activities very fast but old people do it very slowly. So an adaptive window size is proposed here to accommodate all activities.
Many types of research based on a wide variety of methodologies in the area of fall detection are already available and researchers are continuously working on this area till now. We have selected two recent pieces of research [26, 46] which are based on one class classification or anomaly detection or unsupervised learning and one research [37] on the use of adaptive window segmentation to detect fall for comparison with the proposed method which uses both adaptive window based segmentation and one-class classification. Some research is available for detecting human activities using an adaptive window segmentation approach but none of the research is on the use of an adaptive windowing approach for fall detection exclusively. We have included a paper [37] having an adaptive window segmentation technique for comparison. This paper is not exclusively on fall detection rather it is on human activity recognition and they considered human fall one of the activities in their work. We have also used the result of only fall activity for comparison with our proposed method. Table 3 shows background information of [37, 46, 26] and our proposed work and Table 4 shows the comparison of their results.
Comparison of proposed fall detection with recent fall detection methods
Comparison of proposed fall detection with recent fall detection methods
Result comparison
Performance comparison of the proposed method with recent methods.
All three researchers used the accelerometer sensor for fall detection in addition to that [46] have used heart rate sensor also. For datasets, [37] have used one public dataset as well as their dataset, [26, 46] worked on their own collected dataset whereas our proposed work is on two public datasets and our own collected datasets. Two papers [26, 46] focused on unsupervised learning whereas [37] and the proposed method used adaptive window segmentation based fall detection. One of the most important parameters during comparison is that all [26, 37, 46] have not tested their model on real fall scenario whereas the proposed model is tested on simulated falls and real falls, and achieved better results as shown in Table 4. It can also be seen from Table 4 and Fig. 19 that the proposed fall detection approach performs better than [26, 37, 46] in terms of sensitivity, specificity, and Geometric mean.
Ambient assistant living is gaining importance since the last few years because of assisting unaccompanied old people. Human fall detection is one of the subcategories of ambient assisted living. Fall detection devices give support to old people who are living alone. It creates a sense of security that if someone falls then the help will be available immediately. In this paper, an adaptive window based feature extraction has been proposed for fall detection. For this, a function was defined. Based on the function decision of window size has been taken. Then five features were calculated. An anomaly identification based support vector machine with an enhanced kernel metric has been applied to classify ADL activities from fall activities. This fall detection approach is implemented in the fog computing scenario. The proposed method was able to achieve 100% sensitivity and 98.6119% specificity which is better when compared with static window based fall detection method and some recent fall detection methods based on unsupervised learning.
Authorship
Rashmi Shrivastava: conceptualization, data collection, methodology, software, writing original draft; Manju Pandey: supervision, reviewing and editing.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Footnotes
Acknowledgments
We are thankful to FARSEEING project for providing real time data.
Conflict of interest
None.
Author’s Bios
Rashmi Shrivastava (rashmi.kvk@ gmail.com) received her master’s degree in Computer Applications from Govt. Engineering college, Jabalpur (M.P.) She is a research scholar at the Department of Computer Applications, National Institute of Technology Raipur, Chhattisgarh, India and assistant Professor at Dept of CSA, Atal Bihari Vajpayee University, Bilaspur, Chhattisgarh, India. Her research interests include human activity recognition and machine learning.
Manju Pandey (manjutiwa@gmail.com) received her PhD in Computer Science from MNIT Bhopal (MP) India. Her research interests include fuzzy multi-criteria decision making and Internet of Things (IoT). Currently, she is an assistant professor at the Department of Computer Applications, National Institute of Technology Raipur, Chhattisgarh, India.