
Abstract
For better auto-positioning and navigation of robot, this paper proposes a mobile robot navigation method based on radio frequency identification (RFID) technology. The RFID readers were mounted on the robot. Then, the author developed a double positioning algorithm for the position and orientation adjustment, with the aim to guarantee the smooth movement of the robot from the start point to the terminal and to reduce the error in robot motion. The experimental results show that the proposed algorithm has successfully realized the auto navigation and positioning of mobile robot.
Introduction
Mobile robot is an integrated system of intelligence and the future direction in the field of robotics. Autonomy, intelligence and adaptability are three of the most important features of mobile robot. As an integrated, context-aware system, mobile robot supports dynamic decision-making, path planning, behavior control, and task execution. With the continuous development of robot technology, mobile robot has been extensively adopted in such fields as aerospace, nuclear, military, medical, agriculture, and transport.
The core issues of indoor mobile robot research include auto positioning and navigation (Bao, 2011; Peng et al., 2017). With these two functions, an indoor mobile robot, whether working independently or in groups, will be able to move smoothly from the start point to the destination in the absence of intervention (Halber and Chakravarty, 2018; Lin, Z., Hu, L. X. (2004)). During the movement, the robot should know about their own position and orientation. This requires an external sensor to capture the corresponding information. The common positioning techniques include: the GPS, the IR Want, the ultrasonic, the IEEE 802.11, the RFID and the vision-based technique (Want et al., 1992; Saraydaryan et al., 2018; Wang et al., 2018; Gao et al., 2017; Miao et al., 2018; Foxlin et al., 1988; Yamasaki et al., 2005; Guo et al., 2012; Chen and Liu, 2008).
Focusing on indoor mobile robots, this paper adopts the RFID positioning technology. The RFID is an immensely popular automatic, non-contact identification solution in recent years. The radio frequency signals are automatically identified by RFID tags, and the related information is processed by chips (Hahnel et al., 2004). The RFID system usually consists of RFID tags, a reader and software components (Finkenzeller, 2003). Nowadays, the RFID technology is a hot topic in robotic applications (Yamano et al., 2004; Ohno et al., 2003), owing to the special feature of the tag and the unique card number. In an operating environment covered by RFID tags, it is easy to ascertain the absolute coordinates of the mobile robot. The RFID positioning has an accuracy of 8 cm, which is sufficient for handling traditional positioning problems.
In addition to positioning, the navigation of mobile robot also relies on the orientation adjustment of the robot. The contribution of this paper is to propose a dual positioning algorithm to help the robot adjust its pose and complete the automatic navigation.
Environment setting of the RFID system
As shown in Fig. 1, the RFID system adopted for this research has an operating frequency of 2.5 GHz, several 25 cm×25 cm RFID tags, and 9 uniformly distributed small RFID cards.
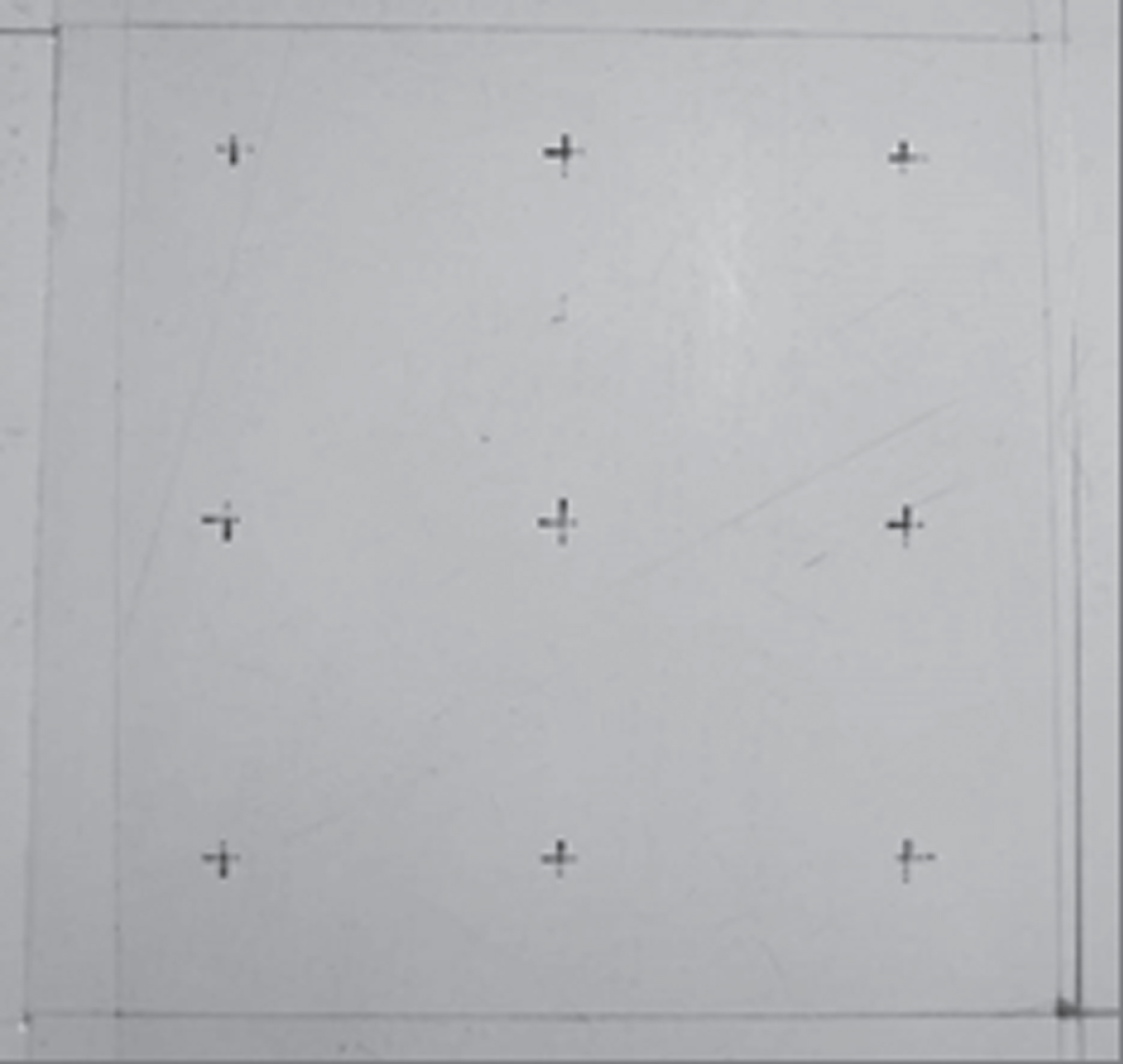
Collection of nine RFID cards.
The experiment was conducted in a 2.5 m×2.5 m room, with the floor covered with 30×30 RFID cards (Fig. 2). The database of the host computer was stored as a 30×30 matrix, that is, each tag was stored in rows and columns in the matrix. The configuration is designed to provide absolute position coordinates for the robot.

Indoor mobile robots operating environment.
The coordinate system was established for the indoor system, as shown in Fig. 3.
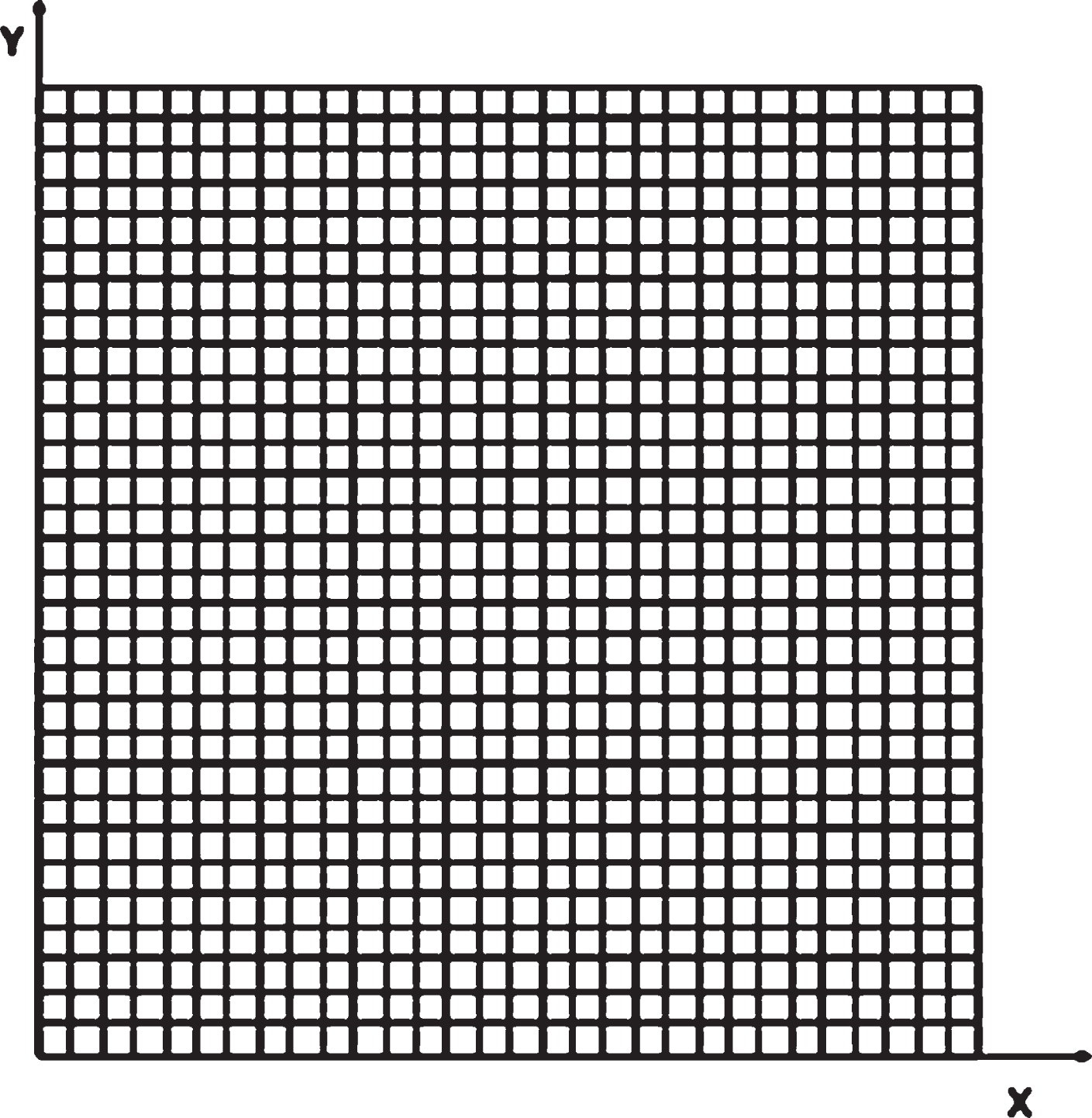
Robot operation maps coordinate.
The function of RFID reader is achieved by using a dedicated chip. When the induction coil produces a magnetic field, the chip reads the ID of the inductive RFID tag. In our design, two 125 kHz RFID reader modules are installed to read RFID tags (Fig. 4).
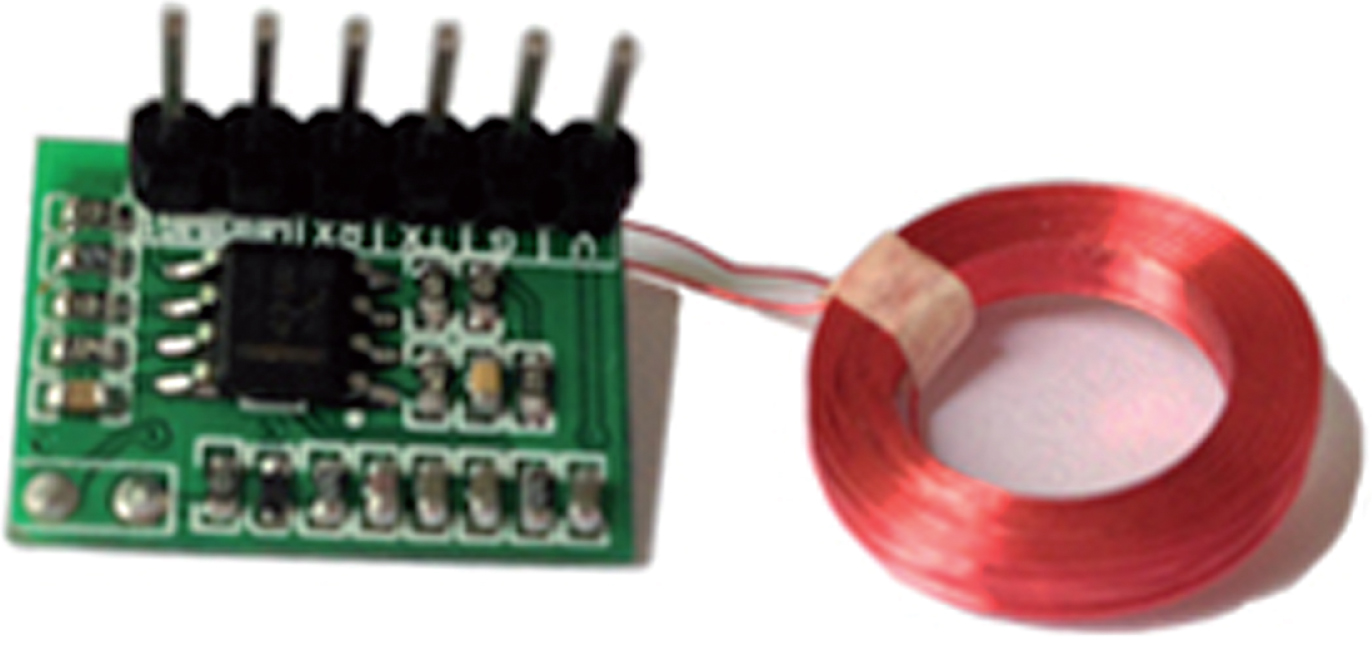
RFID reader.
The circuit is described in Fig. 5. The readers read the RFID tags in the range of the magnetic field, and complete the positioning based on the corresponding IDs.
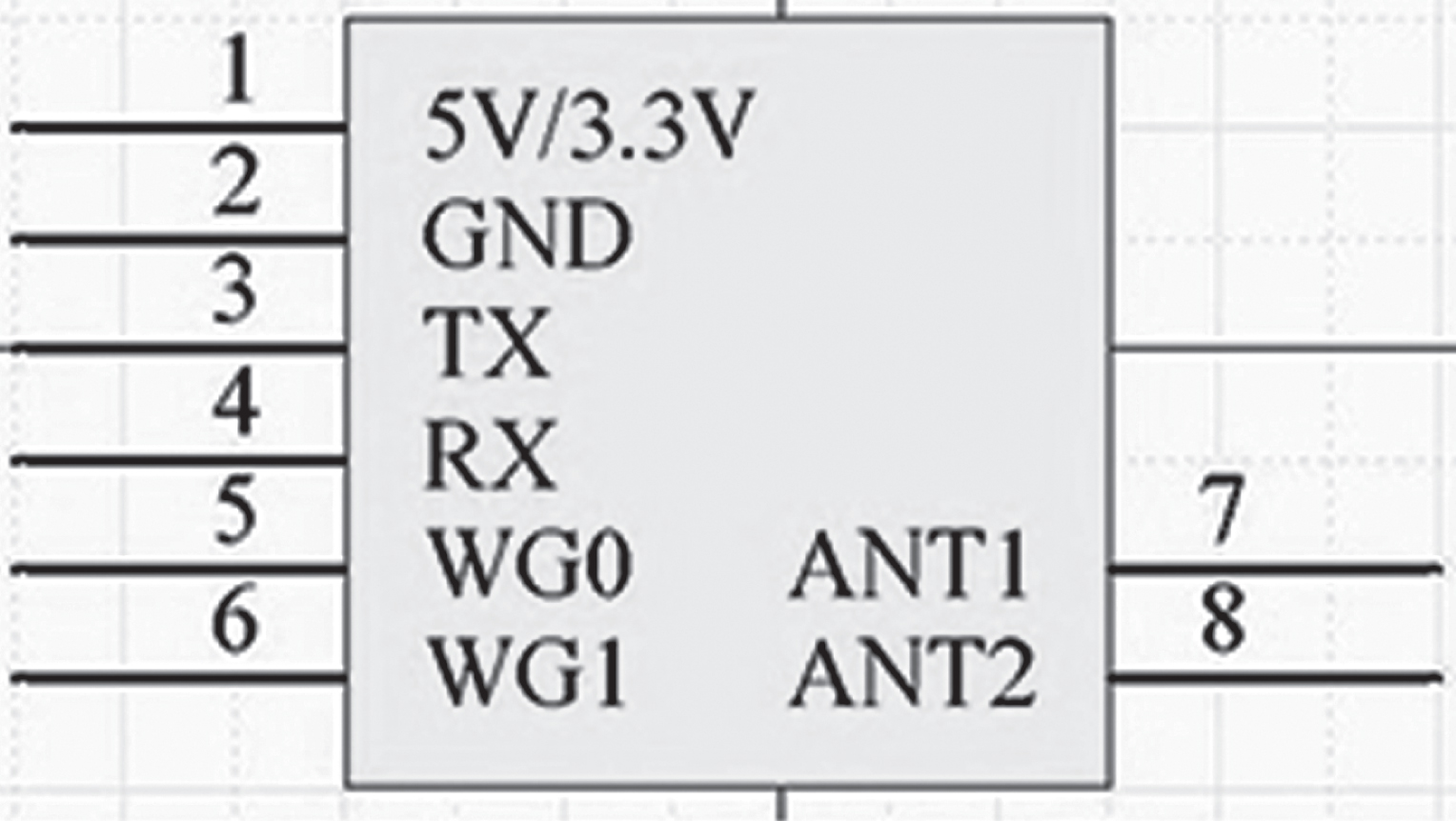
RFID reader pin.
It can be seen from Fig. 5 that the system uses a 5 V supply voltage. In the figure, TX and RX are the serial output pins, while ANT1 and ANT2 are the interface antennas.
The two RFID readers were installed in different places at the bottom of the robot. Each reader can read the tags within range of the magnetic field. Therefore, two different positions were obtained from the same ID of a RFID tag. The installation positions of RFID card readers are shown in Fig. 6, where A and B are RFID readers.
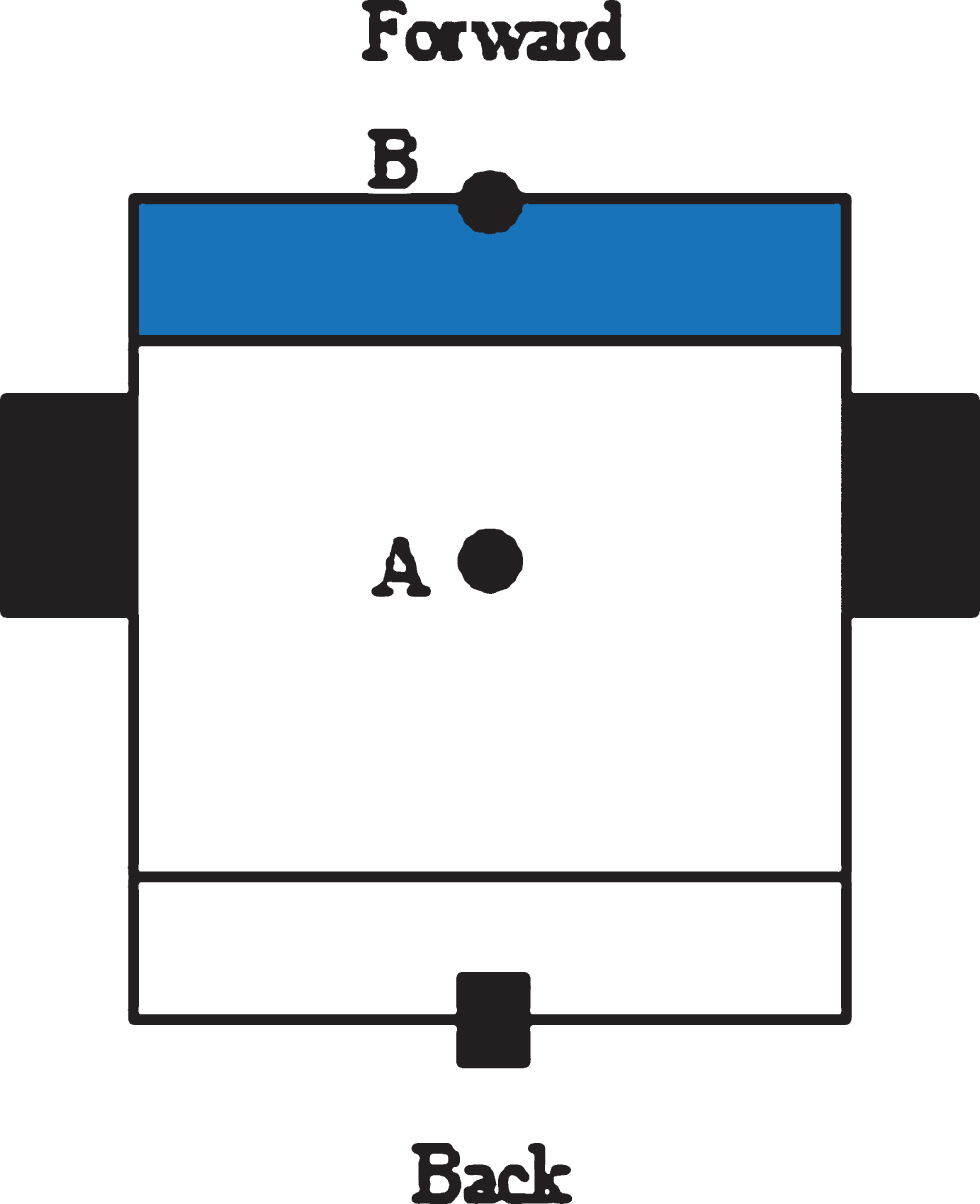
RFID reader installation location.
In this paper, MATLAB is used to construct the obstacle map. Based on MATLAB image processing technology, two information tasks are processed. The first part is to obtain the information of the mobile robot’s working environment. The second part is the obstacle, the starting point and the end point of the mobile robot.
Place obstacles on the test site covered with RFID tags. The steps to construct an obstacle map are as follows: The camera is installed in the middle of the indoor ceiling and is located at the center of the RFID floor; The floor must be covered with good RFID cards and obstacles; The PC and the camera are connected to the common Wi-Fi, and the PC obtains the properties of the camera through the Wi-Fi, and controls the camera. Use the function in MATLAB to connect the camera, and shoot the map of the robot working environment on the indoor RFID floor, and save it as DITU.JPG format. The captured robot map is processed by DITU = imread(’H:.jpg’); image processing to obtain image information. By calling the MATLAB function imshow (DITU), the image is displayed in MATLAB. The function of calling the mouse through MATLAB, through the mouse to obtain coordinate information such as obstacles, starting point, end point and corner in the working environment, as shown in Fig. 7.
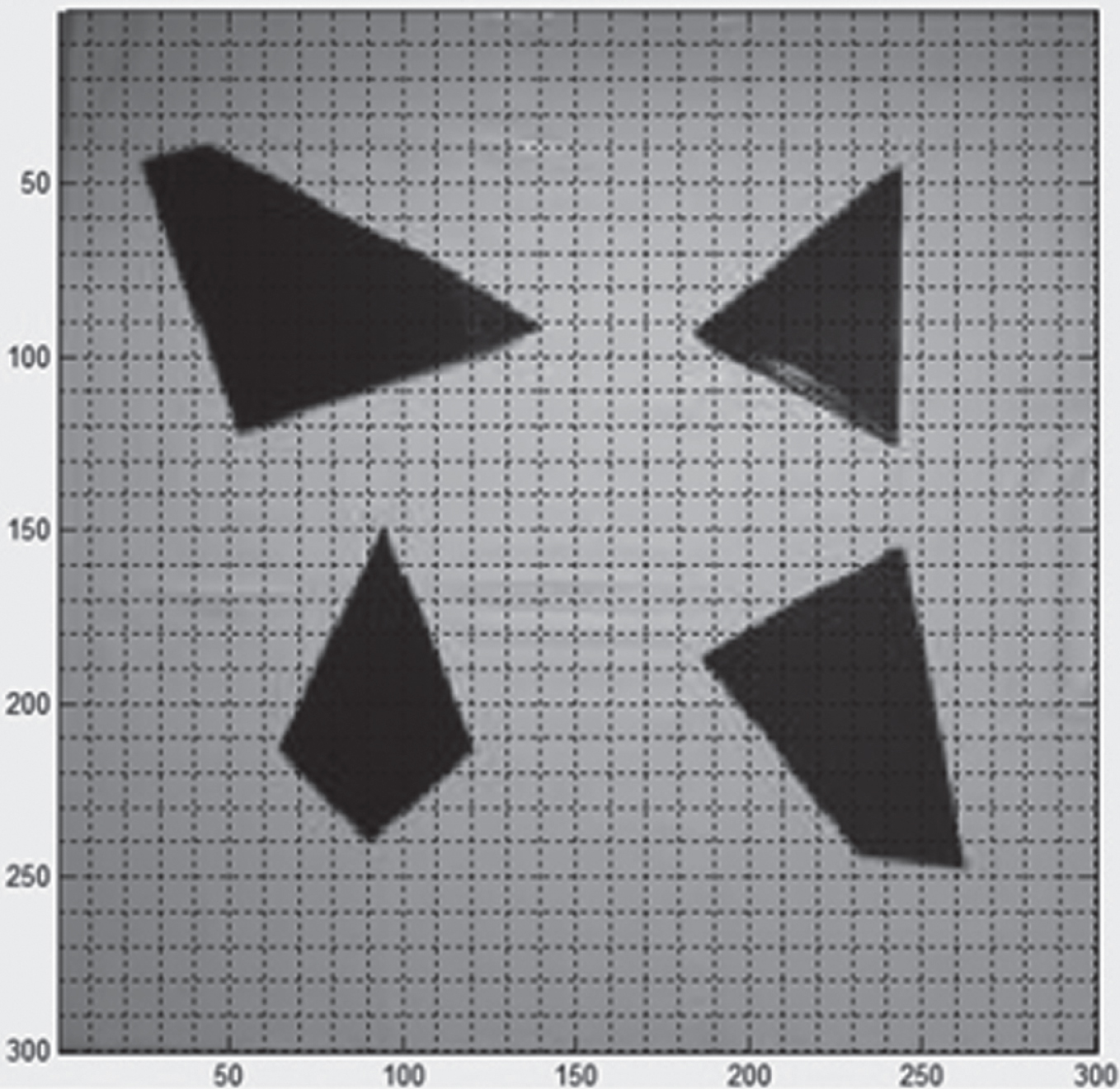
Interface for obtaining image coordinates.
In the mobile robot motion, when the robot arrives at a new location, it should adjust its position and orientation towards the next point. The robot usually relies on a number of sensors to determine its own position, including traditional compass, electronic compass, and ultrasonic sensor. However, the accuracy of these sensors depends on a wide range of factors and the field data collected from experiment. In light of this, a double positioning algorithm was proposed to adjust the direction of the robot. The algorithm enables the robot to adjust its position and orientation in real time.
The RFID (0,0) on the ground floor of the lab was taken as the origin of coordinates to establish a Cartesian coordinate system. A number of intermediate RFID reader modules were mounted on the mobile robot in motion. These modules automatically detected the RFID tag information within the range of magnetic field, and accessed the ID of the RFID tag at the current position by searching the database and calculation. The ID of the coordinate axes on the floor was referred to as the centre position coordinates of the mobile robot (X1, Y1). According to the geometric relationship between the mobile robot and the centre position coordinates, the author obtained the target point coordinates. Then, the vector angle can be calculated based on the angular position of the mobile robot and the target point through right angle geometry. The relevant equation is as follows:
If the vector angle Angle1 is smaller than the pre-set angle, the robot must have deviated from the pre-set trajectory under the influence of certain factors. In this case, the position and orientation of the robot should be adjusted. Then, the RFID readers will read the ID of tags within the range of the magnetic field, calculate the coordinates of the ID on the floor axis, and obtain the vector angle of robot movement. The relevant equation is as follows:
Finally, the angle of deflection can be obtained by the following equation:
The deflection reduces the environmental influence and ensures the robustness of robot movement. Figure 8 shows the movement of the robot and the target point.
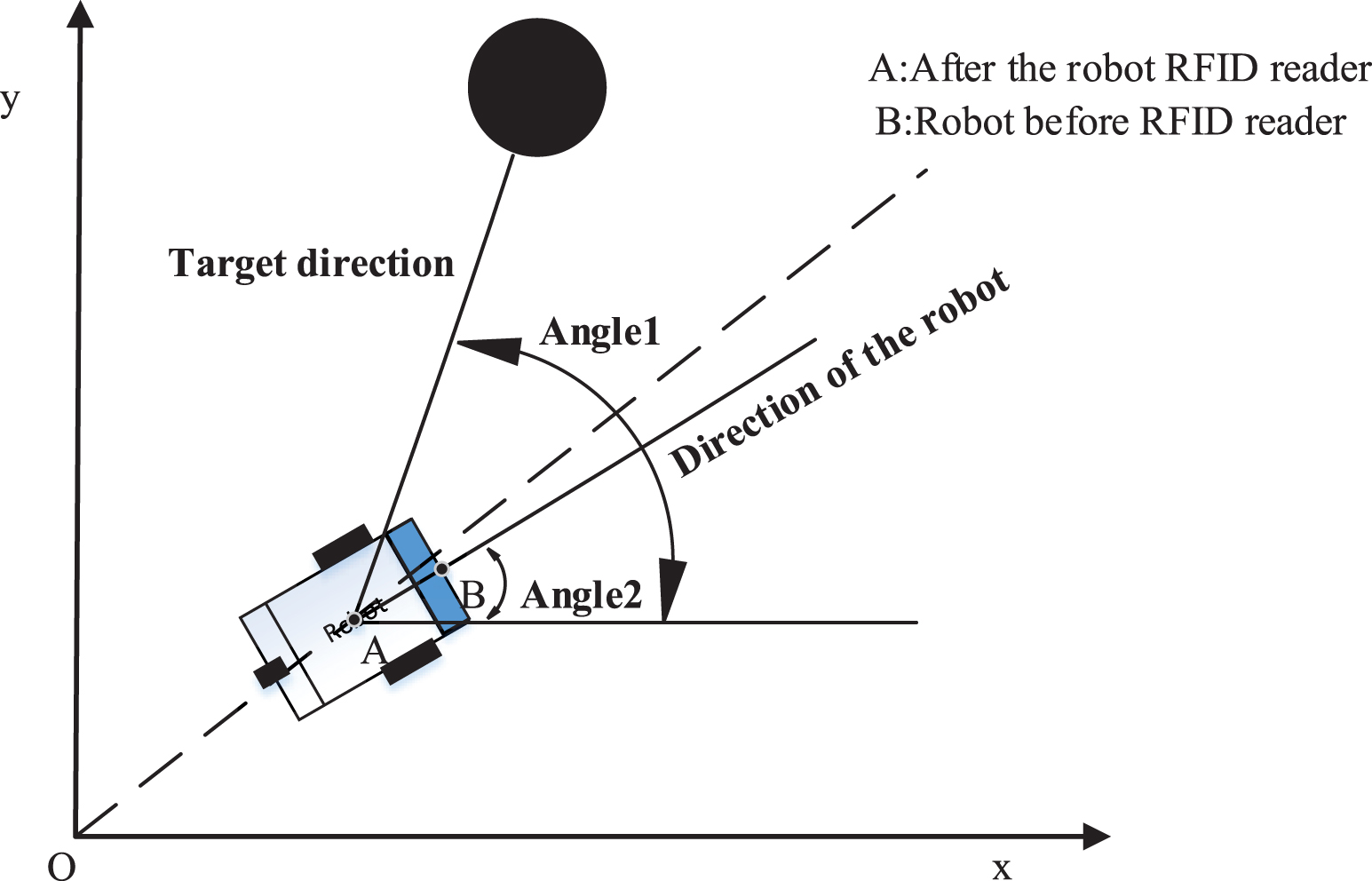
Pairs localization algorithm is a mathematical model diagram.
To meet the data processing requirement, the mobile robot uses the STM32F103VCT6 processor chip of the ARM system. During the RFID test, the robot was placed on the floor. The absolute coordinates of the robot were calculated based on the ID of RFID tags. The motion state of the robot is described in Figs. 9 (a) and 9 (b) below. Figure 9(a) shows the robot arriving at a new location and detecting the RFID tag signal in the area of the magnetic field detected automatically by the RFID reader module. And search the database and calculate the ID of the RFID tag of the current position of the robot, and move the next position of the robot through the algorithm proposed in this paper, and finally reach the position of Figure 9(b) to complete the autonomous navigation of the obstacle avoidance.
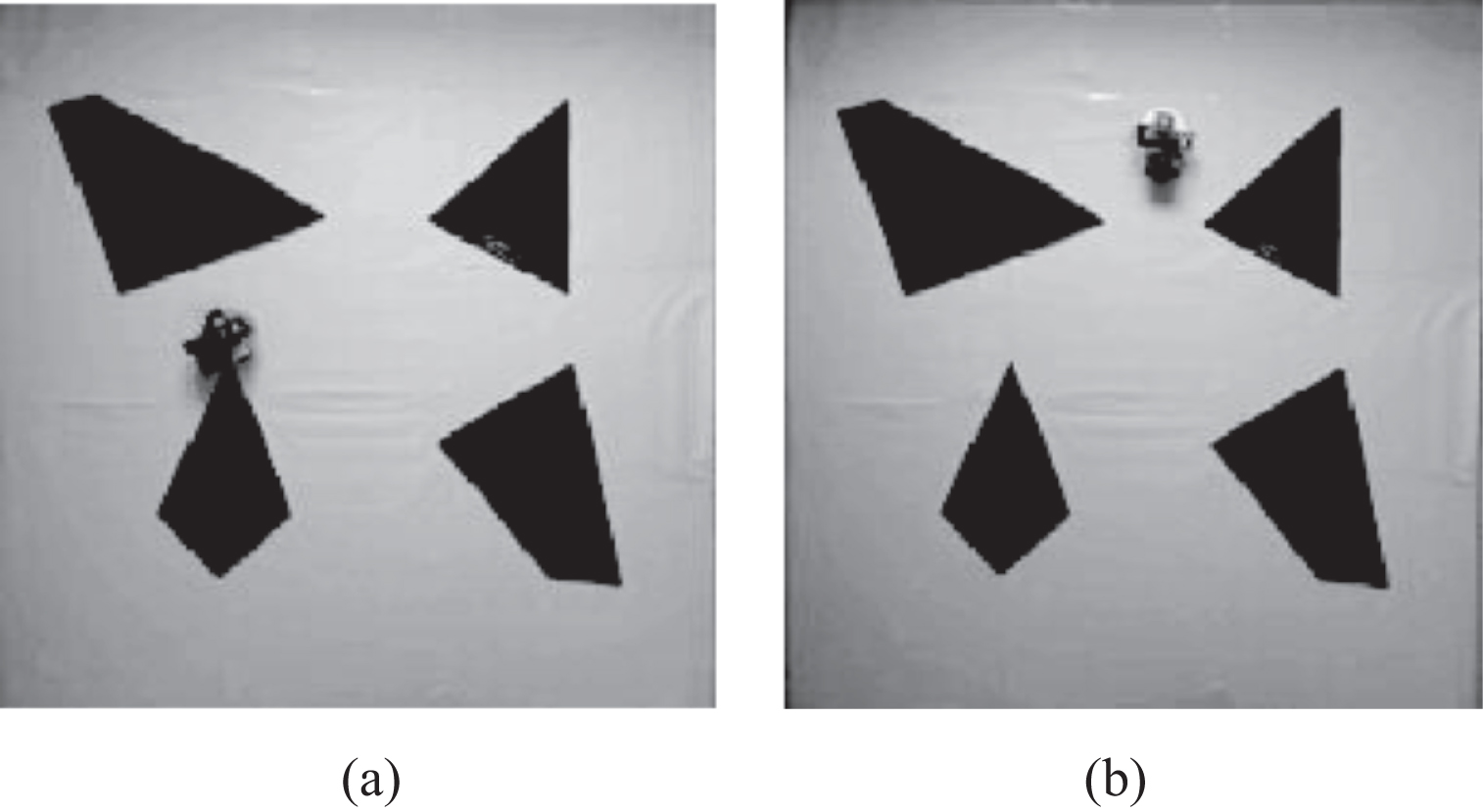
Robot motion.
In this paper, a RFID-based system was developed to solve the indoor positioning of mobile robot. The robot positioning was achieved based on the RFID tags. After installing RFID readers, the author put forward a double positioning algorithm, which enables the robot to adjust its own position and orientation in the movement. The method has achieved low error and sound effectiveness in the adjustment of robot position and orientation.
Footnotes
Acknowledgment
This work is supported by the National Natural Science Foundation of China (Grant No. 61640305). This research was financially supported by the project of Thousands outstanding young teachers’ training in higher education institutions of Guangxi, The Young and Middle-aged Teachers Research Fundamental Ability Enhancement of Guangxi University (ID: 2019KY0621), Natural Science Foundation of Guangxi Province (NO. 2018GXNSFAA281164). Guangxi Colleges and Universities Key Laboratory Breeding Base of System Control and Information Processing, Hechi University research project start-up funds (XJ2015KQ004), Supported by Colleges and Universities Key Laboratory of Intelligent Integrated Automation (GXZDSY2016-04), Hechi City Science and Technology Project (1694-3-2), Research on multi robot cooperative system based on artificial fish swarm algorithm (2017CFC811).