
Abstract
The wheelchair users are exposed to many physical and psychological health problems associated with prolonged seated posture with being inactive in wheelchair, e.g., fatigue, pain in hip joint, pressure sores, etc. Other related issues are increase in caregiver dependency, lower back pains among caregivers, and injury incidences during transfer support, etc. Many elderly subjects who can walk are confined in wheelchairs due to the lack of standing ability. With fewer caregivers and increased numbers of lower limb disabled and elderly subjects, there is a significant need of improved wheelchair designs aimed at enhanced independence of wheelchair users. The focus of present work was at designing a novel reconfigurable wheelchair incorporated with stand-sit-sleep capabilities for the purpose of enhancement of independence and quality of life of lower limb disabled and elderly subjects. In the early part of the study, the integration of QFD (Quality function deployment) and TRIZ (Theory of Inventive problem solving) approaches was employed to structure and explore long term wheelchair user needs to identify critical design parameters and to solve possible design contradictions. Further work presents an overall product design and development phases of a reconfigurable wheelchair. The major contributions of paper can be summarized as (i) Kinematic concept of a reconfigurable wheelchair with single DoF based on QFD design and TRIZ methodology (ii) Graphical synthesis of new wheelchair mechanism (iii) Modelling of a proposed wheelchair using Top down modelling approach (iv) Analysis of model using multi-body dynamics (MBD) simulations using MSC ADAMS and shape optimization using ANSYS and (v) Product realization through 3D printed functional model. The proposed inventive solution to the problems of long-term wheelchair users has a promising potential to enhance independence and quality of life of disabled people.
Keywords
Introduction
Wheelchairs as an assistive device for mobility are chosen by many lower limb disabled and elderly subjects due to their incapability to stand and walk without help of a caregiver. Everyday challenge is transferring such subjects from the wheelchair to and from the bed/ toilet seat. Both in personal healthcare environments and in professional healthcare centres, transfer support to such subjects is provided by caregivers. Issues related with caregiver transfer support are increase in caregiver dependency, lower back pains among caregivers, injury incidences during transfer support due to the caregiver failed to properly apply strength during transfer [1]. The wheelchair users are exposed to many physical and psychological health problems associated with prolonged seated posture with being inactive in wheelchair, e.g., fatigue, pain in hip joint, pressure sores, urinary calculi, excretion failure, etc. [2]. Comprehensive needs assessment study of long-term wheelchair users [3] reported several major problems such as (1) difficulties in transfer from a wheelchair to and from bed/toilet seat (2) difficulties in stand from seating position (3) difficulties in using commode without caregiver support and (4) risk of pressure sores due to long term use of a wheelchair. With fewer caregivers and increased numbers of lower limb disabled and elderly subjects, there is a significant need of improved wheelchair designs aimed to enhance independence and quality of life of long-term wheelchair users.
Transferring from a sitting position to standing represents a fundamental aspect of daily activities. Many elderly subjects who can walk are confined in wheelchairs due to the lack of standing ability. Standing feature of the wheelchair can allow such subjects to have more independence with enhanced accessibility in different conditions [4]. Additionally, a wheelchair with standing feature enables users to have various health benefits such as enhanced blood circulation, reduced risk of pressure sores, etc. [4]. Further, a wheelchair with back seat adjustment can assist long-term wheelchair users in trunk positioning, health preservation, body balancing, etc. [5]. Generally, an assistive robot helps patients to perform effective exercises independently which may lead to fast and better recovery of their functions. In the same way, backrest adjustment feature well as standing feature of the wheelchair can allow the user to exercise independently so that physical damage prevention and physical rehabilitation can be attained. Sit to sleep transfer provides facility to a change in seat to backrest angle and angle the leg rest relative to the seat, while retaining a constant seat angle with respect to the floor [5]. Previous studies have reported that a reclined backrest feature can help to reduce lumbar load and risk of pressure sores [6, 7]. Sit to sleep transfer can be medically essential to address health issues related to postural alignment, pressure management and comfort. Souza et al. [8] reviewed 50 research papers on mobility assistive technology (MAT) and concluded that wheelchairs should be integrated with adjustable seating features like recline backrest, largest adjustment, tilting to reduce fatigue. Provision of one or all of these features may enhance sitting tolerance and quality of life (QoL) of user by reducing pain and complications raised due to long-term wheelchair use. The wheelchair with stand-seat-sleep functions can assure the needs of the long-term wheelchair users and notably decrease the nursing efforts. Thus, the reconfigurable wheelchair built-in with stand-sit-sleep capabilities can be a practical solution to the problems of long-term wheelchair users to promote their independence.
All-purpose chair [9] was designed to be operated in a rocking mode, swivelling mode, lifting mode, reclining mode or any combination. Elevator chair apparatus [10] uses an electric motor driven mechanical ram which pivots the sub-frame with respect to the base and about the forward pivot. A robot-assisted standing manoeuvre for lower limb prostheses [11] was built to assist disabled persons. A robot-assisted standing manoeuvre was mainly used for the purpose of training and to study the rising manoeuvre of human subjects. A robotic walker [12] was designed to provide assistance to disabled/elderly subjects during standing and walking. Elevation chair [13] consists of a driving mechanism that mechanically inclines the seat main body forward at a fixed height. An electric assist-standing chair [14] was designed to assist in standing manoeuvre along with lifting mechanism for low seat. A model of a standing reconfigurable wheelchair [15] was designed and developed for a seven-year-old kid. Many past contributions provide facilities to alter position through increasing the number of degrees of freedom (DoF) in terms of inclination and rotation of the wheelchair. Moreover, none of the contributions were intended on studying and building a wheelchair model integrated with stand-sit-sleep capabilities. Furthermore, current designs of reconfigurable wheelchairs have some limitations such as they are bulky and require considerable user’s physical effort, thus increasing fatigue.
The focus of present work was at designing a novel reconfigurable wheelchair, with stand-sit-sleep capabilities, for the purpose of enhanced independence and quality of life of lower limb disabled and elderly subjects. Even if the design of a wheelchair as assistive device has been given a lot of research interest, there are none contribution focused on designing a wheelchair with all three configurations (stand-sit-sleep) in a single device. The proposed mechanism is considered novel and simply designed using one rotary actuator for all transfers making a wheelchair more compact and light in weight. This mechanism is believed to enable the wheelchair user to change his configuration (stand-sit-sleep) independently and thus it will help in reducing burden on the caregivers. Adjusting the backrest and leg rest in sit to sleep transfer and sit to stand transfer allows the user to exercise to address various medical issues.
The HoQ matrix for the proposed wheelchair.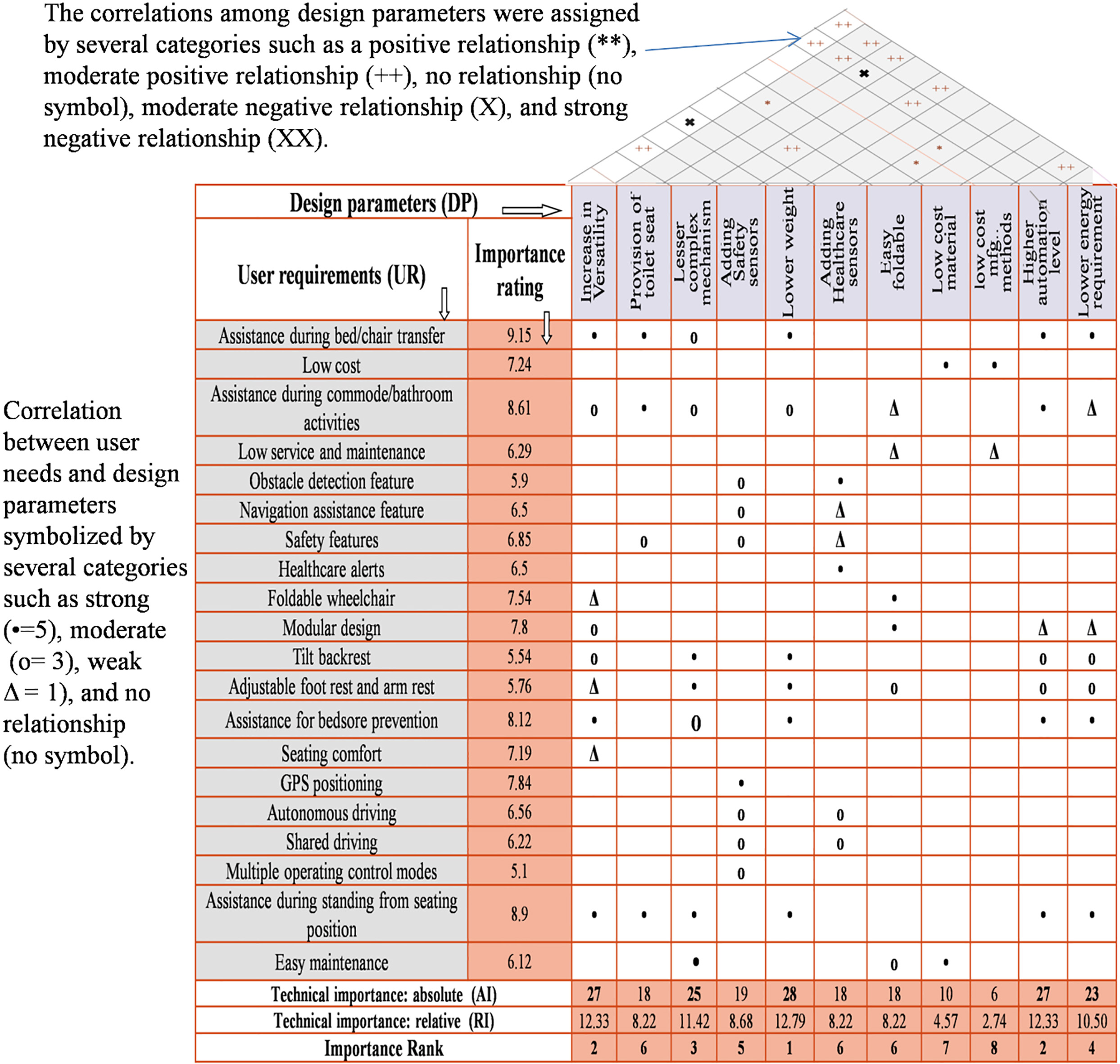
In the early part of study, the integration of QFD (quality function deployment) and TRIZ (theory of inventive problem solving) approaches was employed to structure and explore long term wheelchair user needs to identify critical design parameters and to solve possible design contradictions. Further sections of paper present an overall product design and development phases of a reconfigurable wheelchair with stand-sit-sleep configurations. The major contributions of paper can be summarized as (i) Kinematic concept of a reconfigurable wheelchair with single DoF based on QFD design and TRIZ methodology (ii) Graphical synthesis of new wheelchair mechanism (iii) Modelling of a proposed wheelchair using Top down modelling approach (iv) Analysis of model using multi-body dynamics (MBD) simulations using MSC ADAMS and shape optimization using ANSYS and (v) Product realization through 3D printed functional model. The presented wheelchair design targeted at the problems of long-term wheelchair users which has a promising potential to enhance independence of disabled people.
Research in development of assistive devices has a multidisciplinary nature that involves mechanical design, robotics, materials science, bio-mechanics, electronics and computer science. QFD is one of the methodical strategy which could be intended at the fulfilment of the user needs with better integration of multidisciplinary teams [16, 17]. QFD involves the translation of user needs into design requirements, which are then transformed into process plans and production requirements [18, 19]. Numerous researchers agreed that QFD strategy has enhanced the competitiveness of products with reduction in product development period. The proposed reconfigurable wheelchair was designed using a QFD approach. The primary goal was deploy QFD method to structure and explore user needs to identify critical design parameters and possible design contradictions.
The House of Quality matrix (HOQ) (Fig. 1) for the proposed wheelchair design was constructed to structure and explore user needs to identify critical design parameters and possible design contradictions. Sample of 115 (74 males, 41 females, average age 36.62 with age range 15–67) long-term wheelchair users were contributed to yield comprehensive quantitative and qualitative data related to the topic through questionnaire survey. Then, the collected data is processed by means of QFD design through House of Quality (HoQ) tool to recognize and prioritize design parameters (DP). User requirements (UR) found was inserted into the left column of the HoQ matrix. Design parameters are used to symbolize the voice of designers. Determination of the design parameters for mapping user requirements was done by deliberation with specialists in the field of wheelchair design. On the other hand, the medical parameters related to the design were obtained through consultation with medical professionals. Each design parameter having influences on one or more user requirements were inserted in the top row of the HoQ matrix.
In the body of the HoQ matrix, the relationship matrix indicates how much each user requirement affects each design parameter. The correlation values were symbolized by several categories such as strong (
The next step was the identification of correlations between the various design parameters. These correlations were assigned by several categories such as a positive relationship (**), moderate positive relationship (++), no relationship (no symbol), moderate negative relationship (X), and strong negative relationship (XX). Absolute technical importance and relative technical importance values were assigned to each design parameter. Technical importance of each design parameter was estimated by adding the results of multiplication of the user importance ratings with the corresponding correlation value. For each design parameter, the absolute technical importance can be estimated using Eq. (1) [3].
Where
The relative technical importance
The results in HoQ matrix depict the interactions among 20 user requirements and 11 design parameters with their importance in terms of absolute technical importance (AI) and relative technical importance (RI). Every design parameter has minimum one correlation with the user requirements, while every user requirement has two or more correlations with the design parameters. No vacant user requirement rows or design parameter columns are found in the matrix, hence no inappropriate or unnecessary parameters existed.
The present QFD analysis reported main wheelchair design parameters to improve the independence of long term wheelchair users and technological importance each design parameter to prioritize them aimed at innovative wheelchair. It can be summerised based on QFD analysis that the users requirements reported by the Indian wheelchair user can be resolved by considering the high ranked design parameters which are increase in versatility of wheelchair, lower the weight of wheelchair, increase automation level in wheelchair and less complex mechanism of wheelchair. In completing the QFD design process, a design goal was assigned to each critical design parameter in accordance with the QFD analysis. The design parameters with higher absolute and relative technical has been selected to design new wheelchair which will reflect the satisfaction of the wheelchair users. The consequences of QFD analysis has been used in succeeding steps of product developement of new wheelchair design.
TRIZ theory was proposed by Altshuler on the basis of the study of two million patents [20]. Basically, TRIZ method concentrates on problem perception through contradictions recognition and then offers solutions to the selected problem. TRIZ as design problem solving toolkit has a lot of effective tools such as contradiction matrix, laws of evolution, 40 TRIZ inventive principles, etc. Among several tools, contradiction matrix is the one of the most consequential tool. The capability of this tool is to eliminate design contradictions instead of getting compromises among design parameters [21, 22]. Adding TRIZ methodology to QFD has potential to improve effectiveness of the innovation [23].
Constructed contradiction matrix showing inventive principles with respect to improving and worsening TRIZ parameters
Constructed contradiction matrix showing inventive principles with respect to improving and worsening TRIZ parameters
From the roof matrix of the HoQ, negative correlations among design parameters were identified. These negative correlations were solved with TRIZ contradiction toolkit. Each negative correlation composed of two design parameters in contradictions. These design parameters were mutually affected by making changes. These design parameters were translated into two TRIZ parameters (one improving and the other worsening). The intersection of improving and worsening parameters in the TRIZ contradiction matrix offers a set of guiding ideology for an innovative design.
The TRIZ methodology can be encapsulated in four steps [21, 22]:
Understand the design problem and identify design conflicts. Construct a contradiction matrix by mapping improving parameters (IP) and worsening parameters (WP) with list of 1 to 39 TRIZ engineering parameters. Identify appropriate TRIZ inventive principles out of 1 to 40 TRIZ principles from the contradiction matrix to solve related conflict
From the roof matrix of the HoQ (Fig. 1), two negative correlations (contradictions) between design parameters were identified. Improved versatility will lead to a problem of weight increment of the wheelchair. In addition, improved automation level of the wheelchair will make the shape of the wheelchair more complicated. Thus, the first identified improving parameter (IP) was the versatility while the associated worsening parameter (WP) is weight increment of a wheelchair. The second identified improving parameter was the level of automation while the worsening parameters associated to it is shape of the wheelchair. Two kinds of contradictions identified are shown in Fig. 2.
Two kinds of contradictions identified.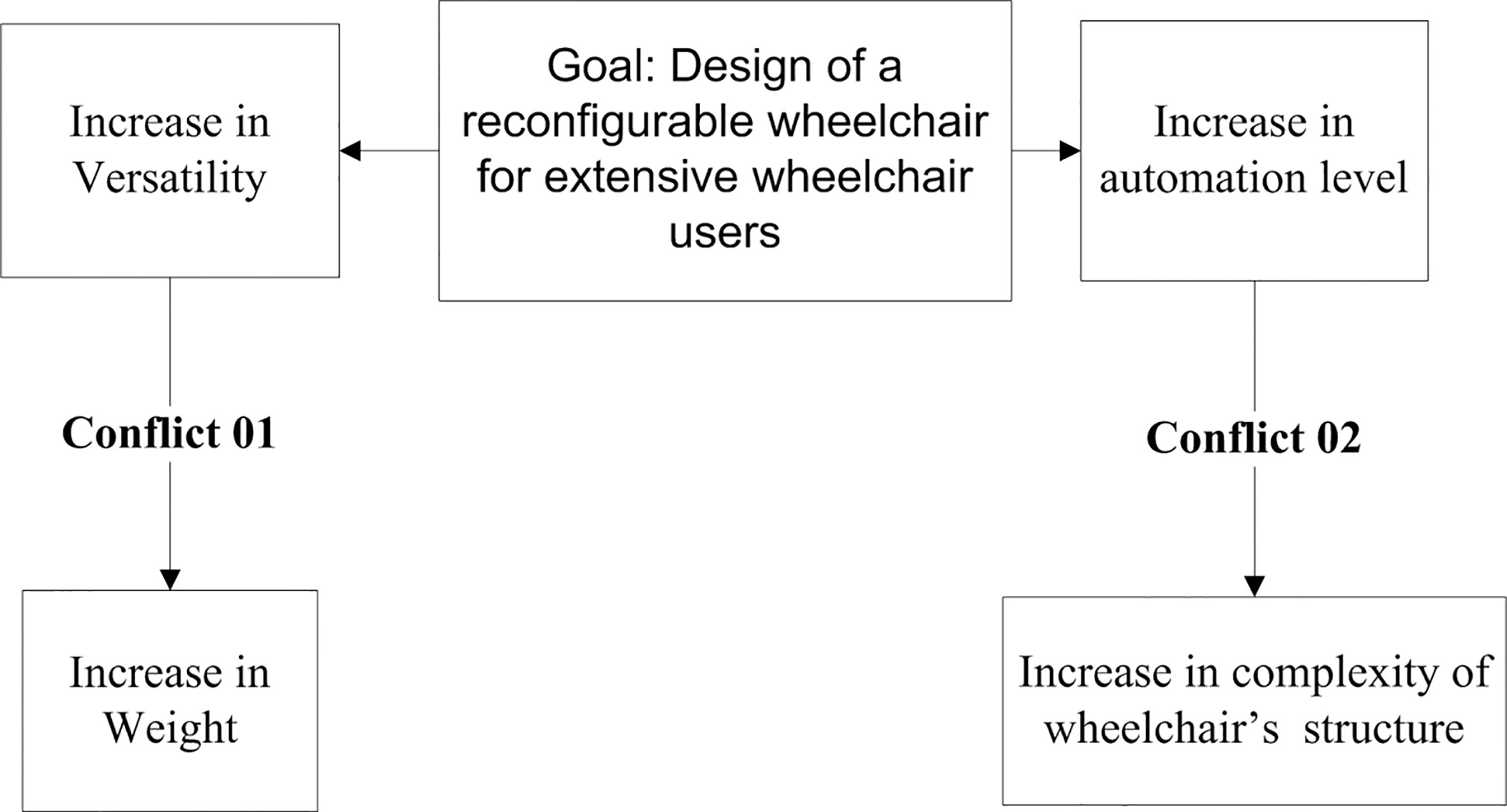
After recognizing the design contradictions in fulfilling the design requirements, the improving parameters (IP) and worsening parameters (WP) were accurately mapped with the 39 TRIZ engineering parameters. The intent was to construct a contradiction matrix of improving parameters (IP) and worsening parameters (WP) to recognize suitable TRIZ inventive principles. Table 1 details the relation between selected TRIZ engineering parameters and the related inventive principles.
Developing design strategy using 40 inventive principles method
By checking the contradiction matrix (Table 1), the inventive principle required for solving design contradictions were obtained. In order to achieve more versatile wheelchair design and to avoid the increase in the weight of system, selected inventive principles were segmentation (#1), multi-functionality (#6), anti-weight (#8), and dynamics (#15). Further, in order to improve the automation level of the wheelchair and to avoid complexity of wheelchair structure, selected inventive principles were segmentation (#1), inversion (#13), colour changes (#32), and dynamics (#15). The inventive principles suggested by the contradiction matrix were reviewed and most relevant principles i.e. universality (#6), inversion (#13), and dynamics (#15) were selected to serve as the guiding ideology for an innovative design of the reconfigurable wheelchair. Table 2 explains the design strategy employed based on the recognized inventive principles.
Design strategy on basis of the selected TRIZ inventive principles
Design strategy on basis of the selected TRIZ inventive principles
The present section implemented the TRIZ approach to find the guiding ideology to solve possible contradictions raised during QFD analysis. From the TRIZ contradiction toolkit, Multi-functionality (#6), Inversion (#13) and Dynamicity (#15) inventive principles which are available in TRIZ toolkit has been selected to resolve conflicts.
The QFD-TRIZ based a kinematic concept presented here is illustrating mechanical linkages structure for new a reconfigurable wheelchair. The target group is lower limb disabled and elderly subjects having incapability to stand and walk without help of caregiver. The wheelchair design is intended for the user having normal weight, ranging from 40 to 100 kg. Sit to stand transfer aims at assisting elderly subjects, disabled subjects confined in wheelchairs due to the lack of standing ability. Sit to sleep transfer aims at providing self-assisted backrest adjustment mechanism allowing user to lie down in the wheelchair at will. In each transfer, the goal was to provide a transfer safe and comfortable transfer.
The overall dimensions of wheelchair and a mechanical linkage should be in the range of dimensions of a standard wheelchair described in the IS 7454: 1991 [24]. These dimensions of a standard wheelchair (Table 3) define the seating position, which is the initial position for both the transfers.
Dimensions of a standard wheelchair described in the IS 7454: 1991 [24]
Dimensions of a standard wheelchair described in the IS 7454: 1991 [24]
The kinematic concept of a reconfigurable wheelchair.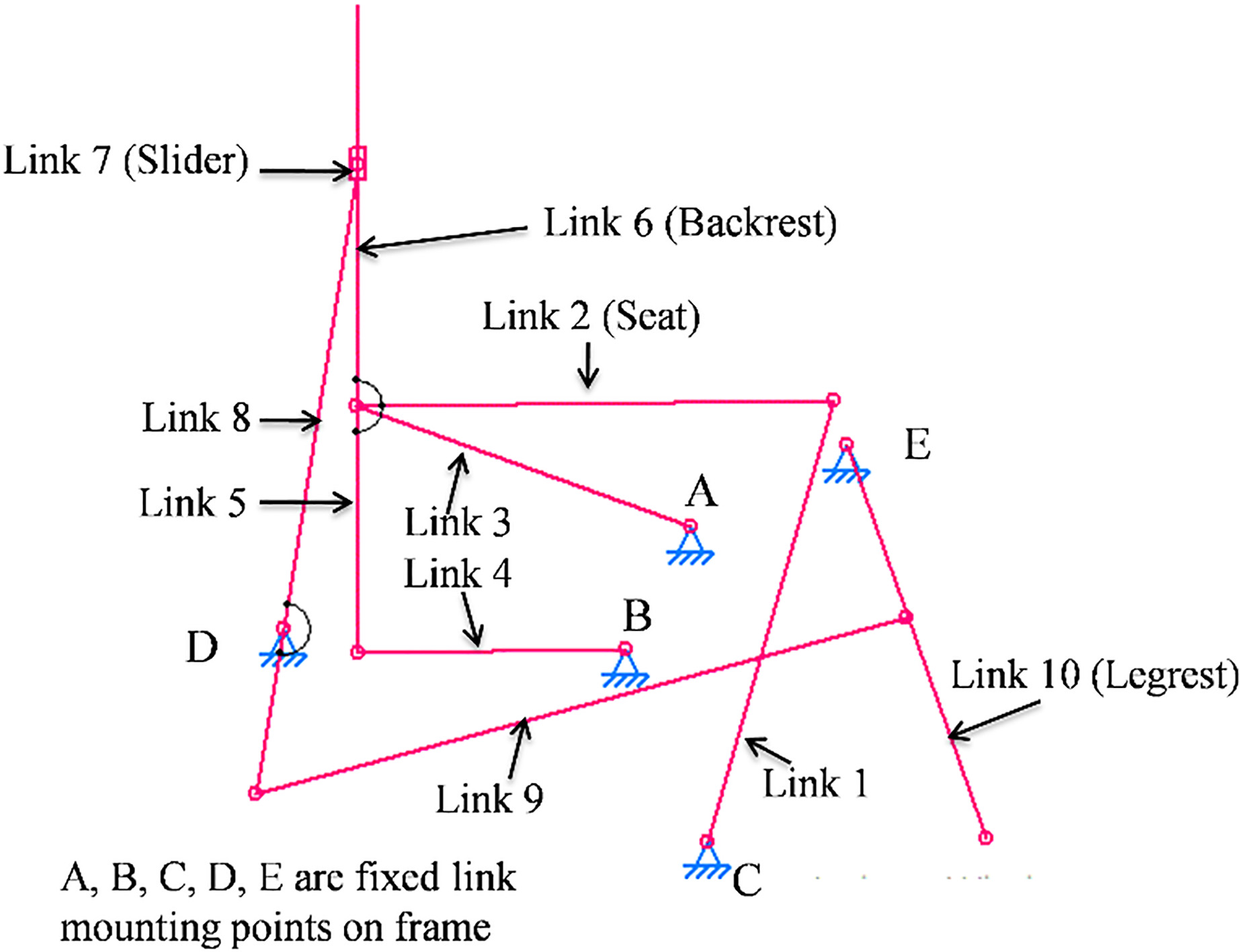
DoF calculations for both transfers
The kinematic mechanism concept (Fig. 3) for a reconfigurable wheelchair consists of Watt’s six-bar mechanism [25, 26, 27] (attached twice at both sides of the wheelchair frame) and one slider crank mechanism (attached once at middle of wheelchair frame). The link 1, seat pan (link 2), link 3 and frame form the first four-bar linkage of Watt’s six-bar mechanism. The second four-bar of Watts six bar mechanism is formed by the link 3, link 5, link 4 and frame. Both four bar mechanism coupled with common link 3. Further, slider crank mechanism consists of the backrest (link 6), slider (link 7), link 8 and frame where slider (link 7) reciprocates on the bar attached to the backrest (link 6) at the backside. The backrest (link 6) must be locked with the link 5 during sit to stand transfer and unlocked during sit to sleep transfer. Note that seat (link 2), link 1, link 3, link 4 and link 5 are stationary during sit to sleep transfer. Link 10 (leg-rest) is connected with extended part of link 8 using link 9 in order to co-ordinate leg-rest and backrest motion. Note that A, B, C, D, E are fixed mounting points on frame as shown in Fig. 3. Whole mechanism guides the motion of the parts of the wheelchair for sit to stand and sit to sleep transformations. As the proposed mechanism has single DoF (Table 4), the movement of input link 8 (actuated by the electric motor) automatically guides the movement of the other link.
The DoF was calculated for both the transfers using Gruebler’s equation [25] of DoF as Eq. (3)
Where,
The dimensional synthesis of presented kinematic concept was carried out using graphical synthesis method. Dimensional synthesis deals with the determination of kinematic dimensions of the mechanism, so that it reaches to desired configuration from starting configuration [25, 26]. SAM (software for synthesis and analysis of mechanism by Artas Engineering) [28] was be used to synthesize proposed mechanism.
Figures 4 and 5 illustrate the defined start and end configurations for sit to stand transfer and sit to sleep transfer respectively. The sit configuration is same in both the cases. The sitting configuration meets the standard wheelchairs dimensions prescribed in IS 7454:1991. In the end configuration of sit to stand transfer, the backrest and seat pan are inclined in a way that it secures support for the users and provides safety to the user. The end configuration for sit to sleep transfer is intended to put the user in an almost horizontal pose (sleeping configuration). The wheelchair must be fixed by wheelchair breaks during cycle of operation to ensure safety.
Start and end configurations for sit to stand transfer.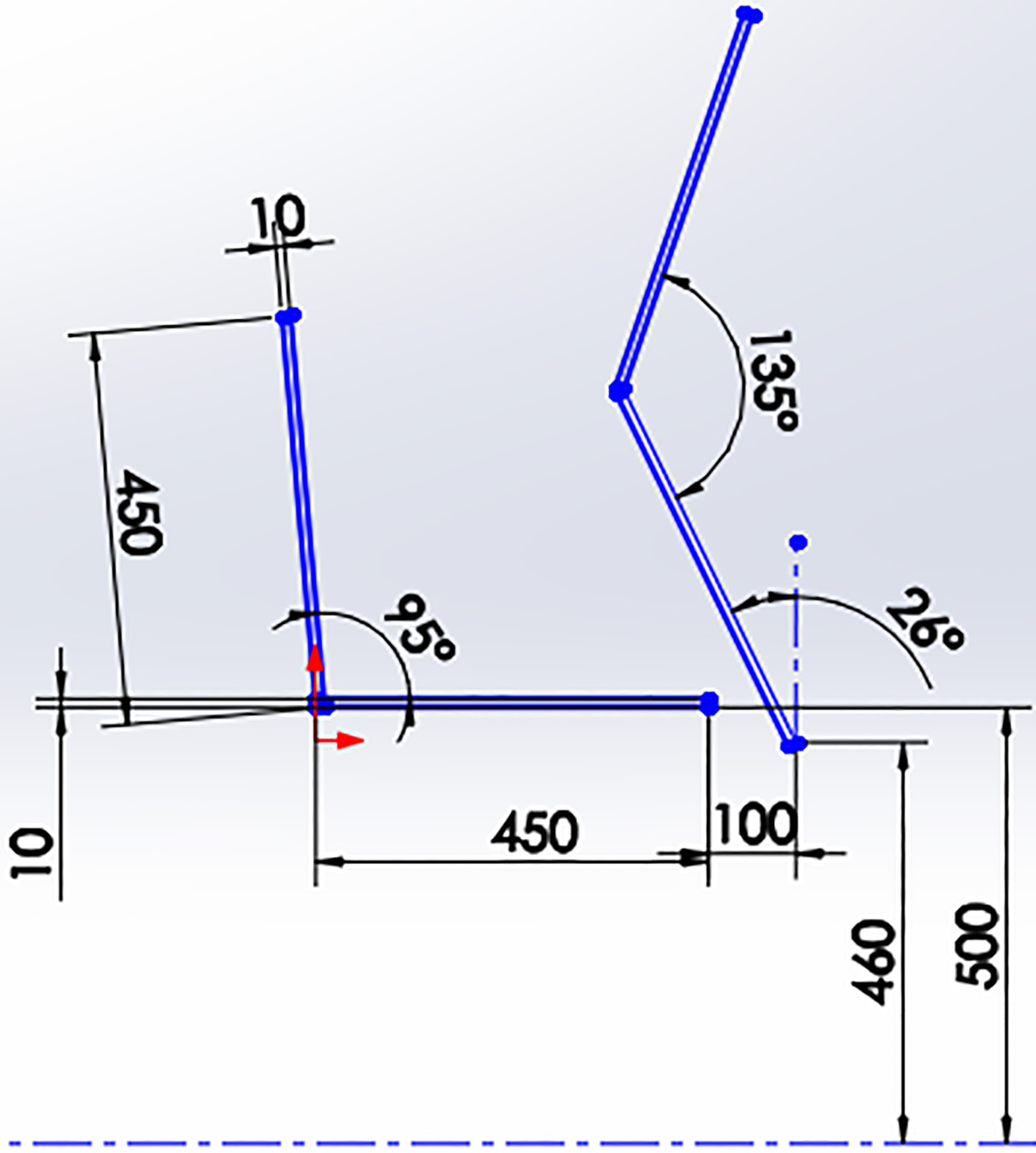
Start and end configurations for sit to sleep transfer.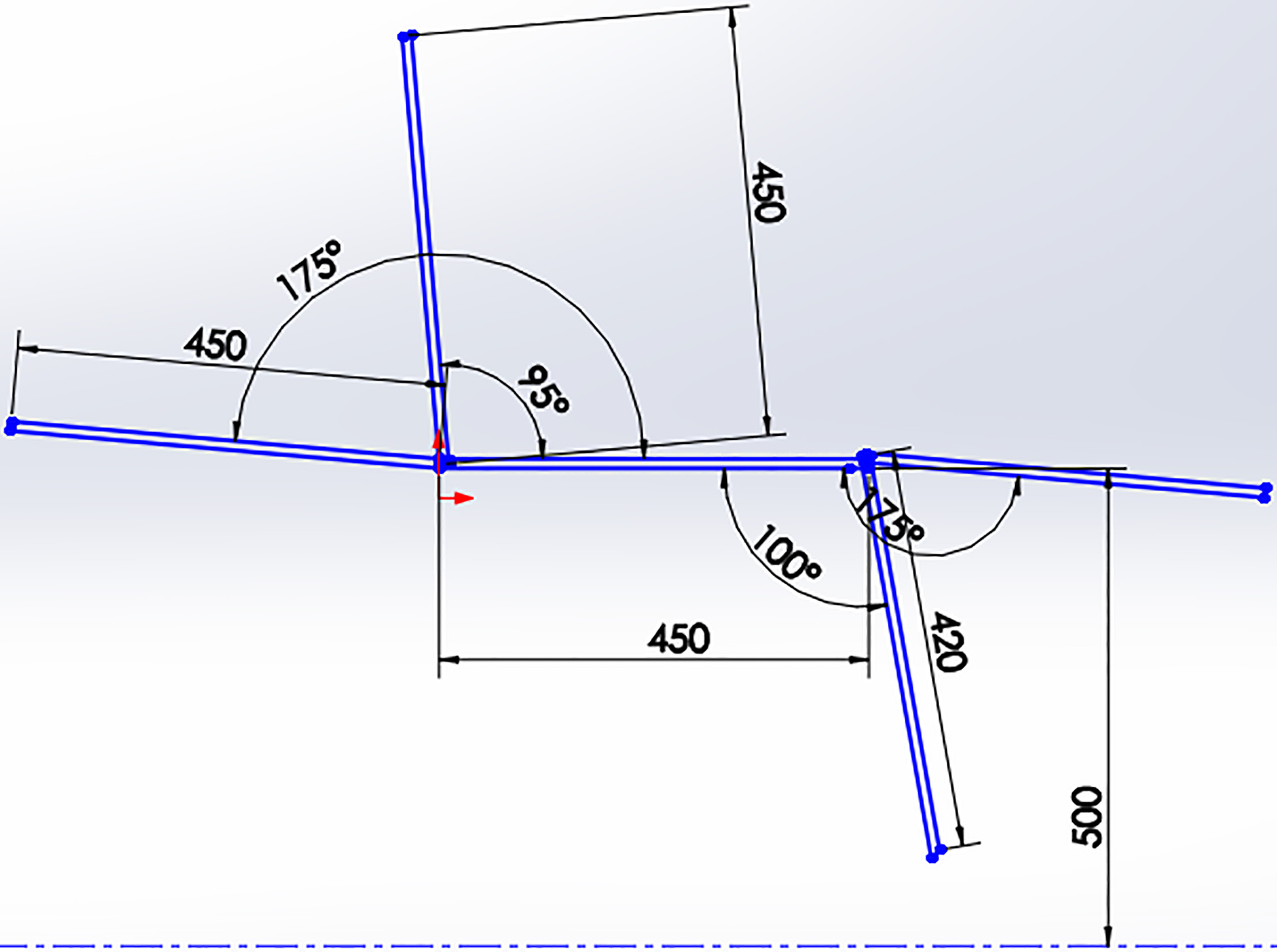
Figure 6 illustrates the two-position graphical synthesis [27] of the four-bar mechanism used in kinematic concept of a wheelchair. Revolute joints connecting the link 1 and link 6 (backrest) to link 2 (seat pan) are shown as A and B at sitting position and as A’ and B’ at the standing position respectively. The objective was to find the fixed pivots A0 and B0 using the two-position graphical synthesis. As per the two-position graphical synthesis theory, fixed pivots A0 and B0 must be select on the perpendicular bisectors of the line AA’ and line BB’ respectively. Since both A0 and B0 must be under the seat (link 2), B0 was selected near to joint A on seat pan (as shown in Fig. 6), and A0 was at the intersection of a vertical line passing through B0 and the perpendicular bisector of AA’. Further, revolute joint C (C’ at standing configuration) was selected at extended part of link 6 (backrest) (as shown in Fig. 6) to constrain motion of link 6 (backrest). As per the two-position graphical synthesis theory, C0 was selected at the intersection of the vertical line through B0 and the perpendicular bisector of line CC’. This brought all fixed pivots A0, B0, and C0 are on the same vertical line, which permits a simple integration of the mechanism links into the wheelchair frame.
Graphical synthesis of the four-bar mechanism used in Sit to stand transformation.
Graphical synthesis of the slider crank mechanism used in stand-sit-sleep transformation.
Figure 7 illustrates the three-position graphical synthesis of the slider crank mechanism used in kinematic mechanism of a wheelchair. X, Y, Z were selected at desired positions of slider at sleeping, sitting, standing configuration respectively. As per the three-position graphical synthesis theory, fixed pivot O selected on perpendicular bisectors of line XY and line YZ. Note that positions of X, Y, Z were adjusted in order to bring point O (fixed pivot point) within frame of the wheelchair.
Graphical synthesis of the parallelogram mechanism used in Sit to sleep transformation.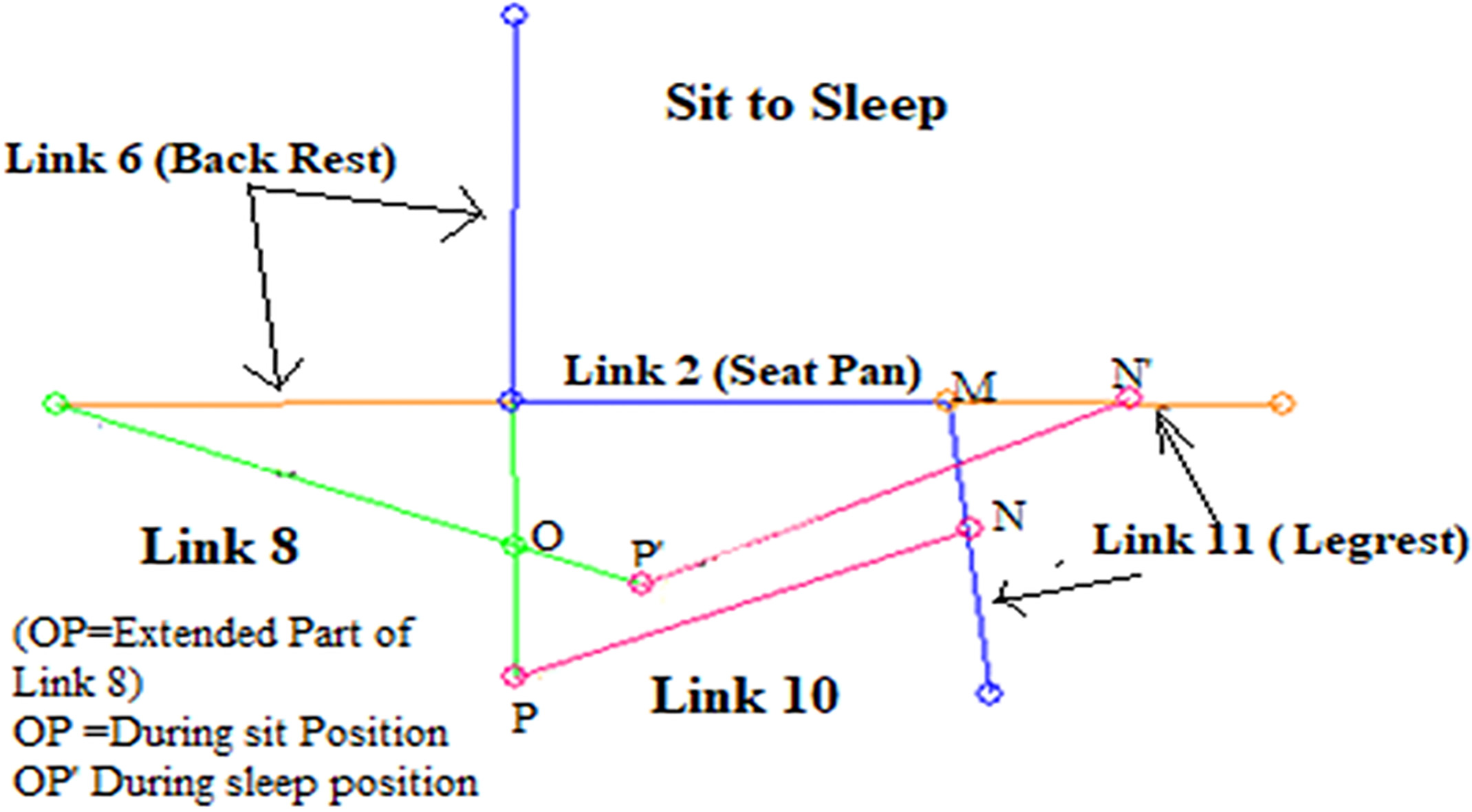
Figure 8 illustrates synthesis of the leg rest movement mechanism. For changing the angle of link 11 (leg rest), a simple parallelogram mechanism was used. Extended part of link 8 (OP at sit position and OP’ at sleeping position) connected with link 11 (leg rest) by means of link 10, to co-ordinate positions of leg rest during sit to sleep transfer. Note that OP is equal to MN. Length of OP and link 10 found using SAM software to obtain desired leg rest position.
The top-down modelling approach was implemented in the assembly modeling of a wheelchair. Overall wheelchair Dimensions were kept within the dimensions of a standard wheelchair described in IS 7454: 1991. CAD (Computer-aided Design) modelling work was started in the wheelchair assembly file and the geometry of one part was helped in defining the geometry of another part. Top-down modeling approach [29, 30] allowed having a full view of an assembly of wheelchair frame and mechanical parts while making dimensional changes of assembly in real time. Starting from a set of geometrical references of wheelchair frame, several mechanical parts were modeled keeping focus on the relationship between all the mechanical parts. SolidWorks motion simulation tool was used to simulating assembly motions which helped to enhance wheelchair assembly. SolidWorks Motion simulations ensured that the leg-rest, sit and backrest were moving in a coordinated way during sit to stand transformation as well as the leg-rest and backrest moves in a coordinated way during sit to sleep transformations by using trajectories of motion. The model was also checked for interferences among modeled parts. After adding external load of user (100 Kg) during motion study, centre of gravity (CG) of the wheelchair during all transformations was always falls within the footprint of the wheelchair preventing toppling of a wheelchair, hence proving that there is no risk of falling user. The complete linkages arrangement accomplishes a planar motion and attached to wheelchair frame. The dimensions of the final wheelchair design are as shown in Fig. 9. Linkage structure of wheelchair mechanism at sit, stand and sleep configuration depicts in Figs 10–12 respectively.
The overall dimensions of the final wheelchair design.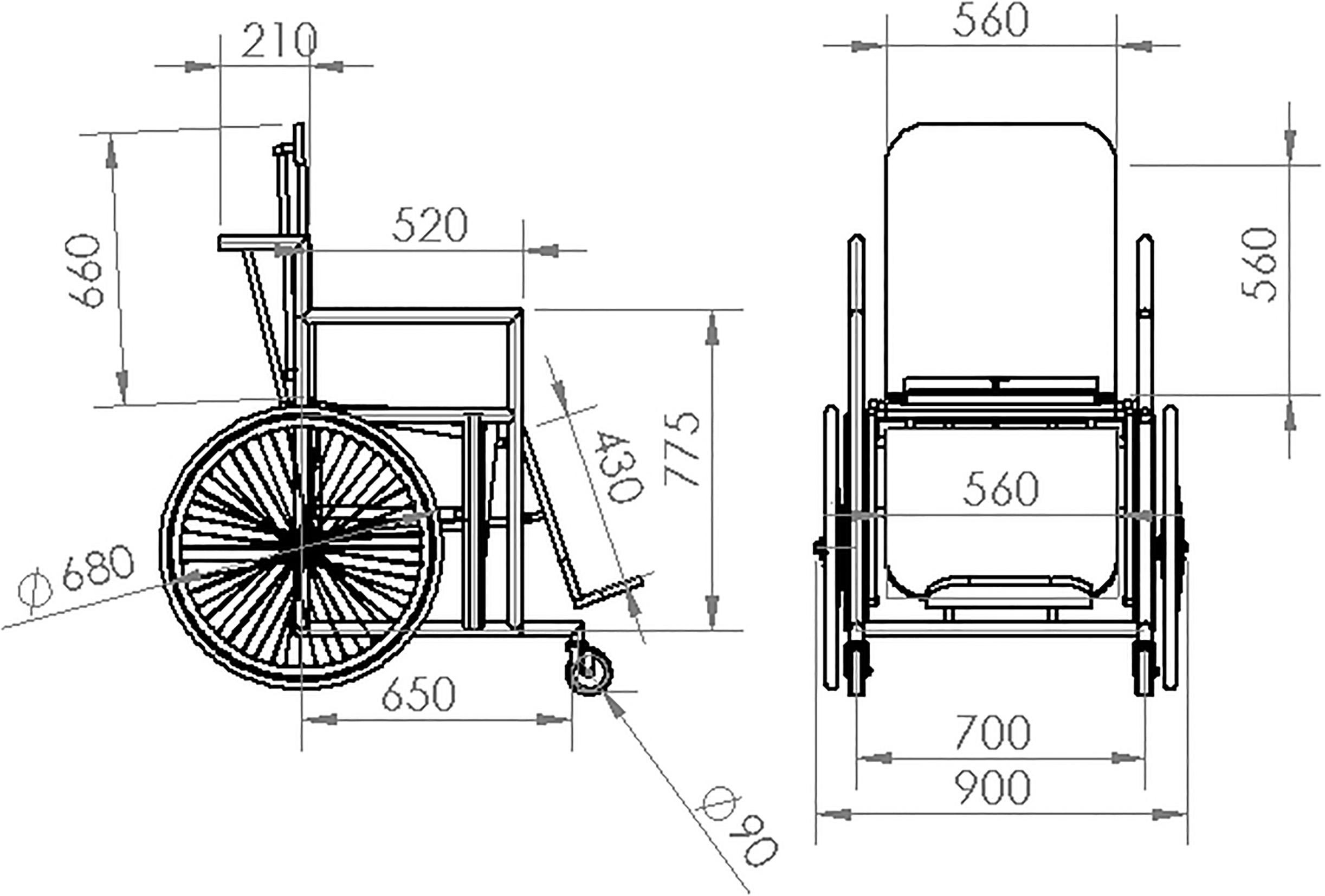
Linkage structure with frame for seat position.
Wheelchair at standing configuration.
Wheelchair at sleeping configuration.
Direction of input link for sit to sleep transfer in wheelchair MBD model.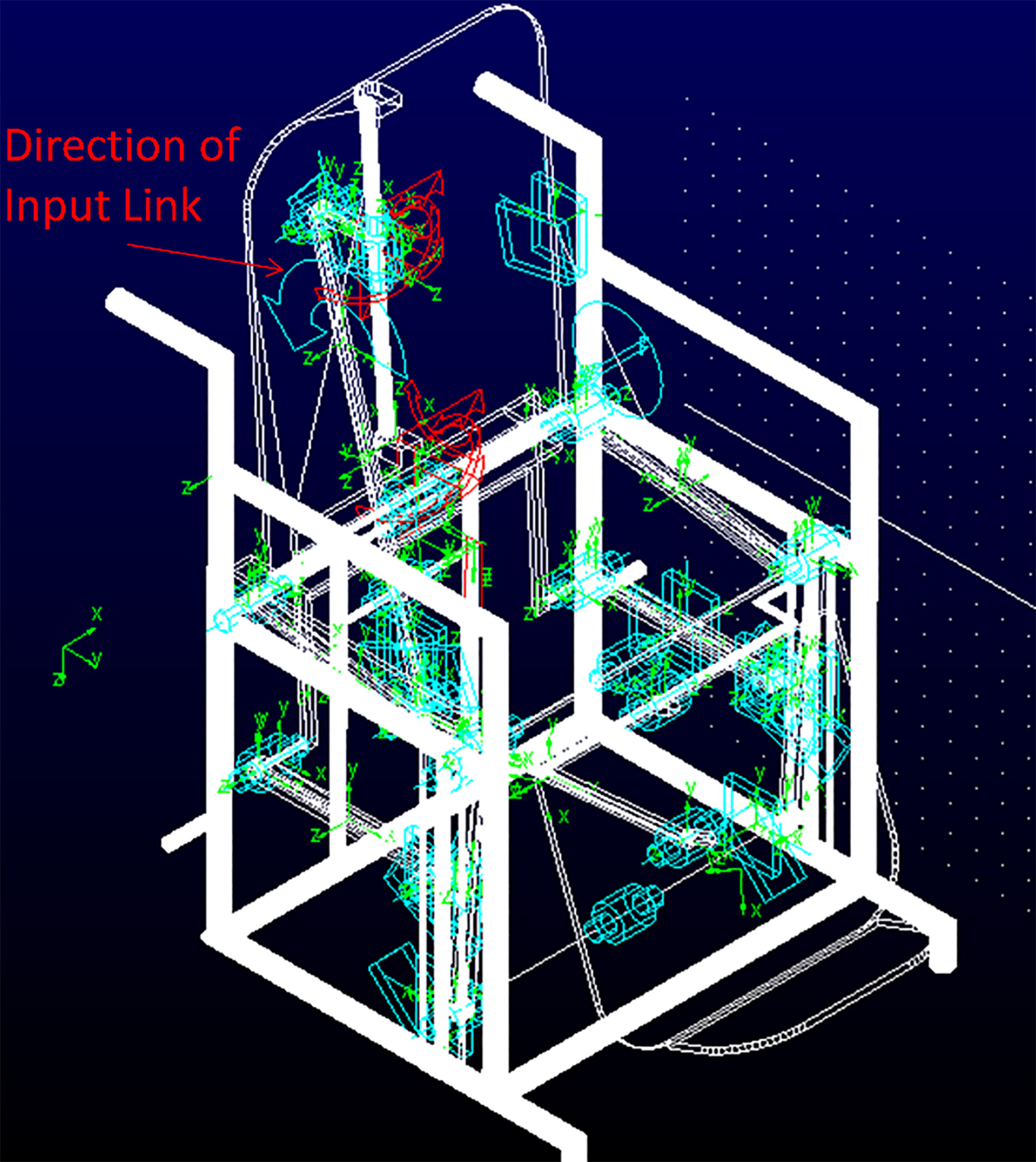
(a) Motor torque and energy consumption graph during Sleep to sit transformation; (b) Motor torque and energy consumption graph during Sit to sleep transformation; (c) Motor torque and energy consumption graph during Sit to stand transformation; (d) Motor torque and energy consumption graph during Stand to sit transformation.
(a) Forces exerted at various mount points during Sit to sleep; (b) Forces exerted at various mount points during Sit to stand; (c) Forces exerted at various mount points during stand to sit; (d) Forces exerted at various mount points during sleep to seat.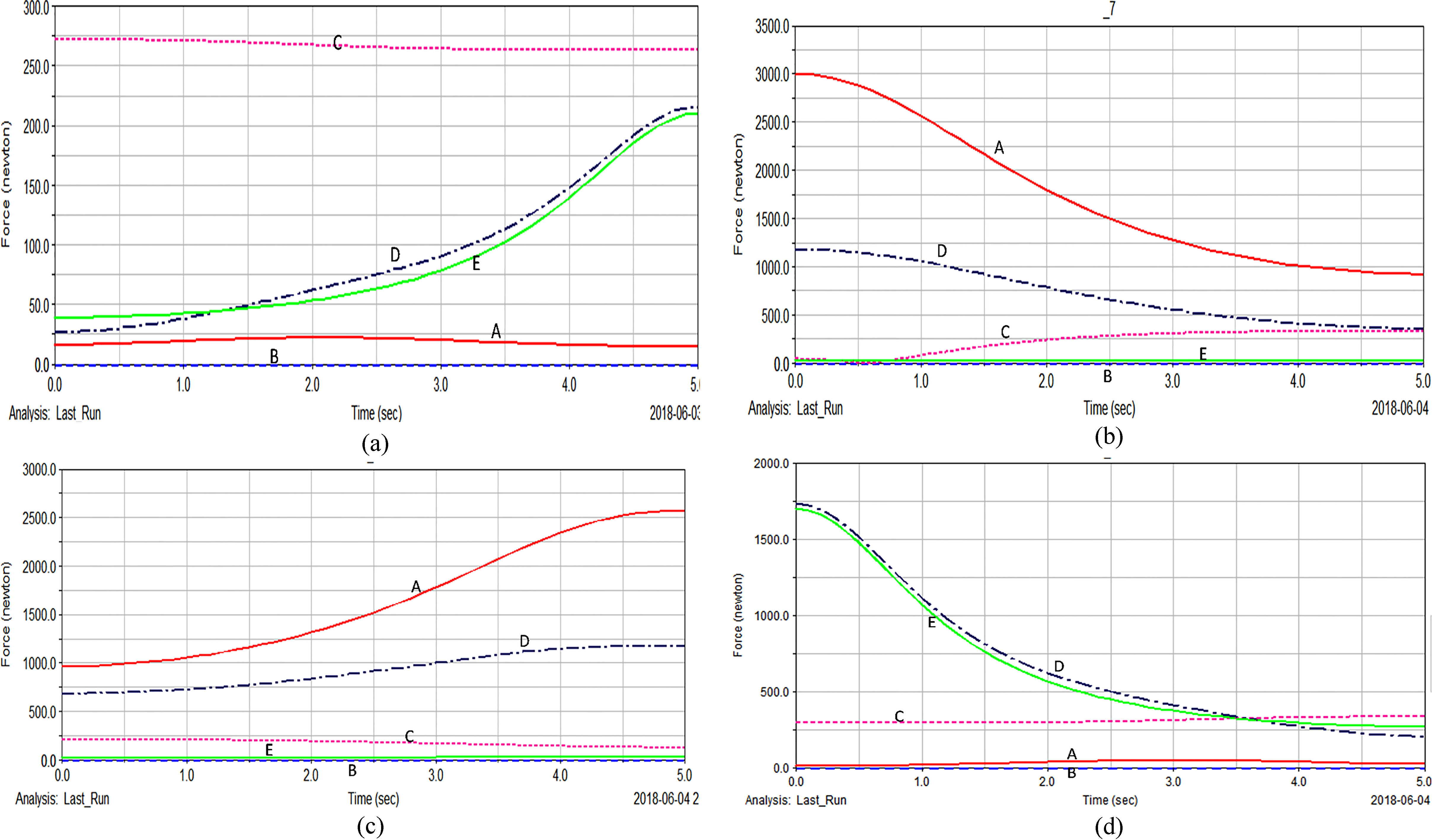
The primary function of a proposed wheelchair is to help user to stand-sit-sleep independently. In addition, to reduce the weight and the cost of the proposed wheelchair, it is important to choose an appropriate actuator providing adequate torque, for different load condition. To calculate the required actuator torque during cycle of operation, multi body dynamics (MBD) simulations were done in MSC ADAMS considering user load of 100 kg as external load on wheelchair model in ADAMS. The virtual prototype of the wheelchair, as modeled in Fig. 10, was transferred into Adams multi-body model, using the transfer interface embedded in Solid Works. Steps taken to wholly define the dynamic model: (i) Define mass properties kinematic elements (ii) Define of kinematics joints (iii) Define friction models (iv) Define an external loading acted upon system (considered 100 kg as maximum loading conditions). During MBD simulations, actuator rotates input link 8 by 70 degree in clockwise direction for sit to sleep transfer (Fig. 13) and by 22 degrees in anticlockwise direction for sit to stand transfer. A maximum motor torque of 625 Nm (Fig. 14a–d) is recorded during the entire cycle of operation. Since the maximum torque is 625 Nm, therefore, it was found that the DC motor needs to have a torque of at least 625 Nm.
Boundary conditions used in stress simulation.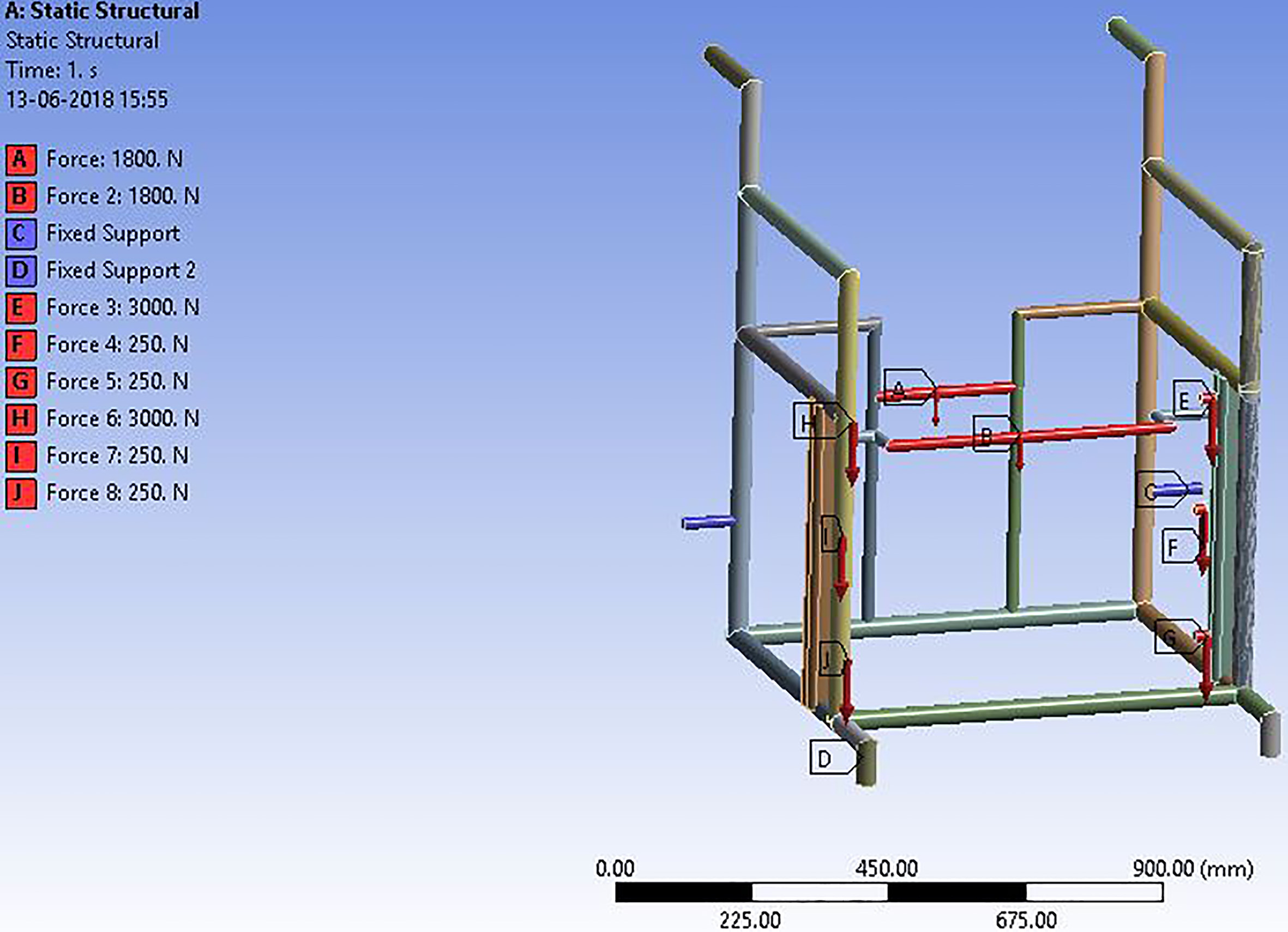
Total deformation obtained after static structural analysis.
Von Mises stress obtained after static structural analysis.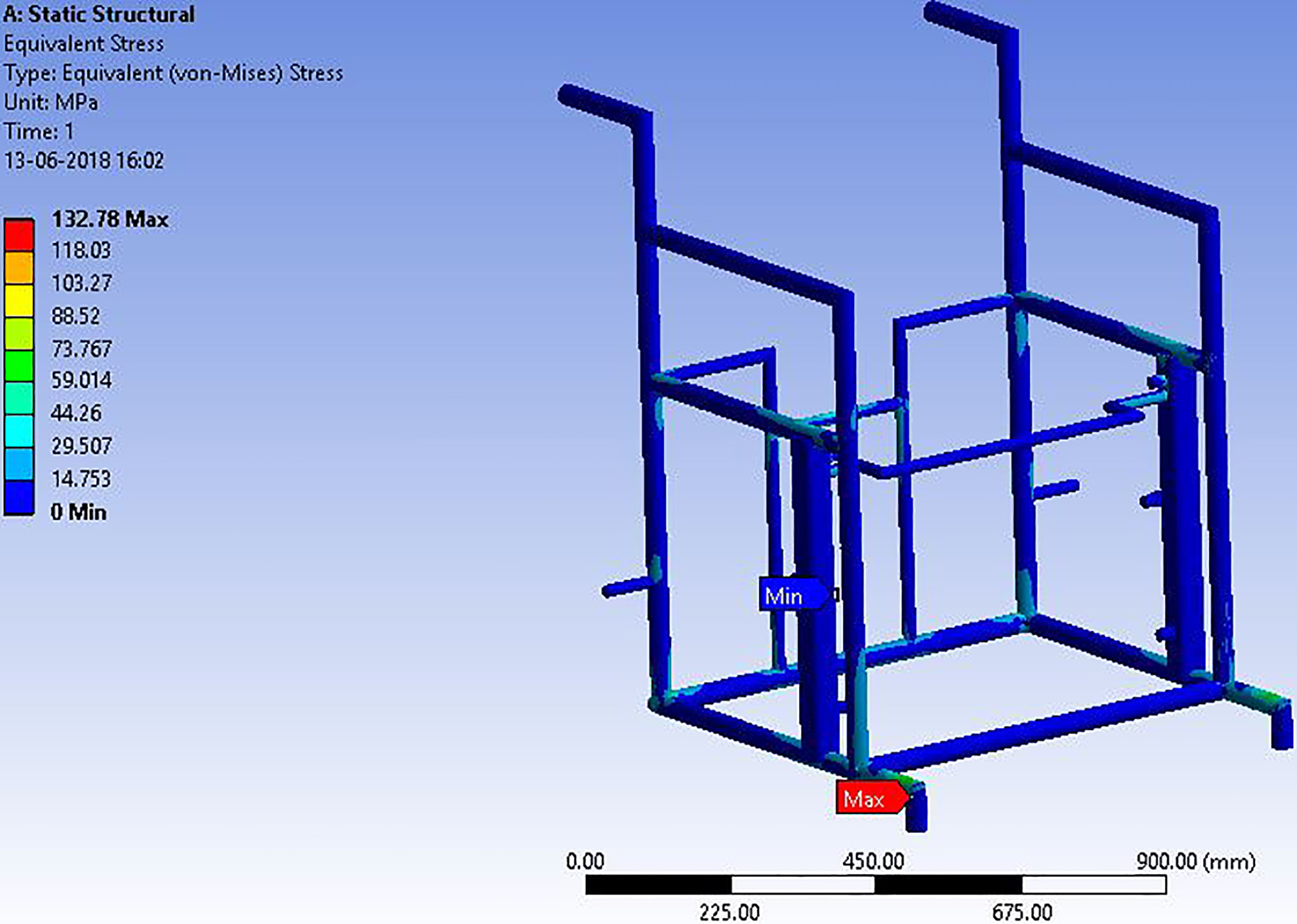
Boundary conditions used in static structural analysis of link 5.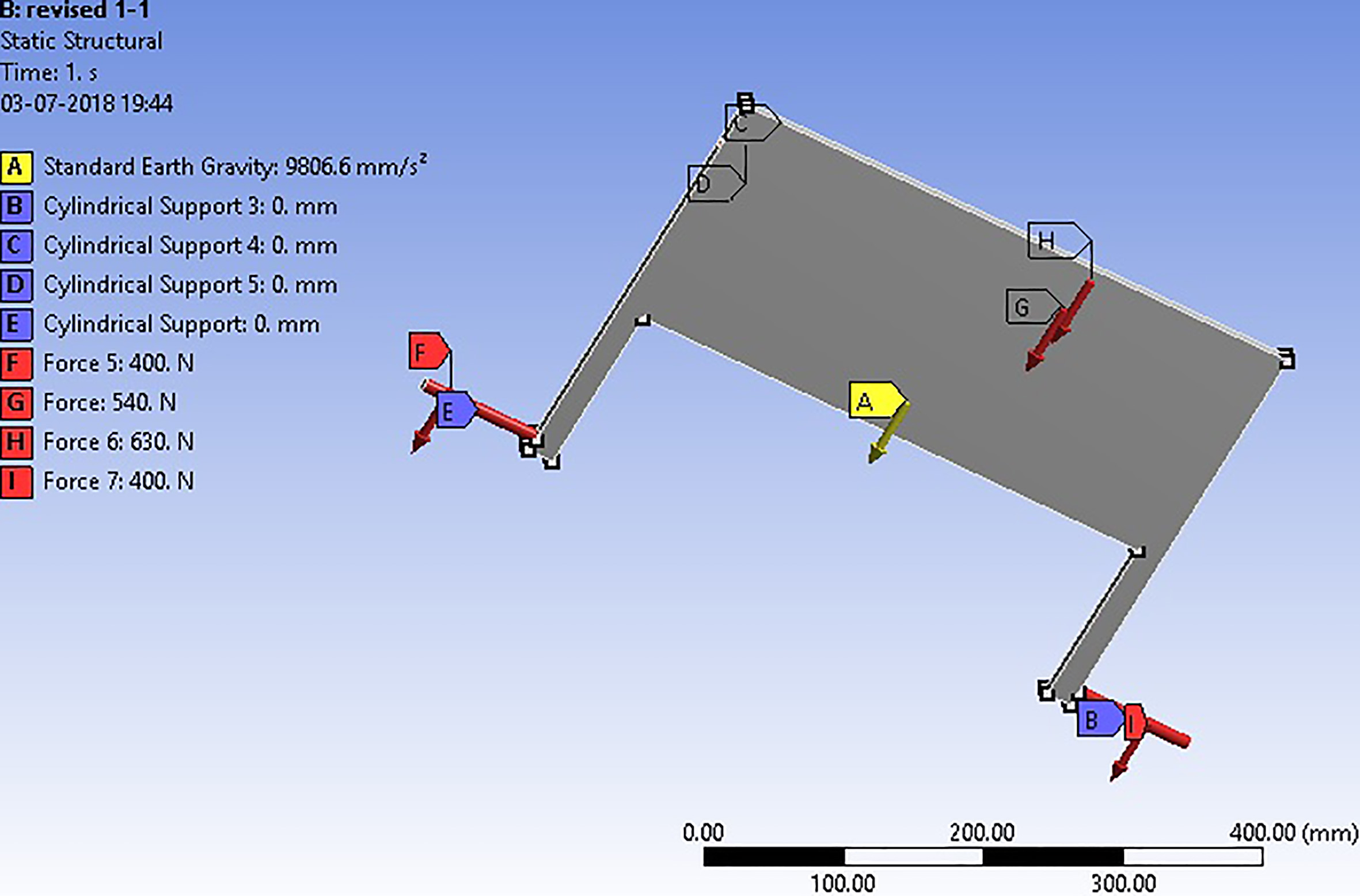
Von Mises stress obtained after static structural analysis of link 5 (before optimization).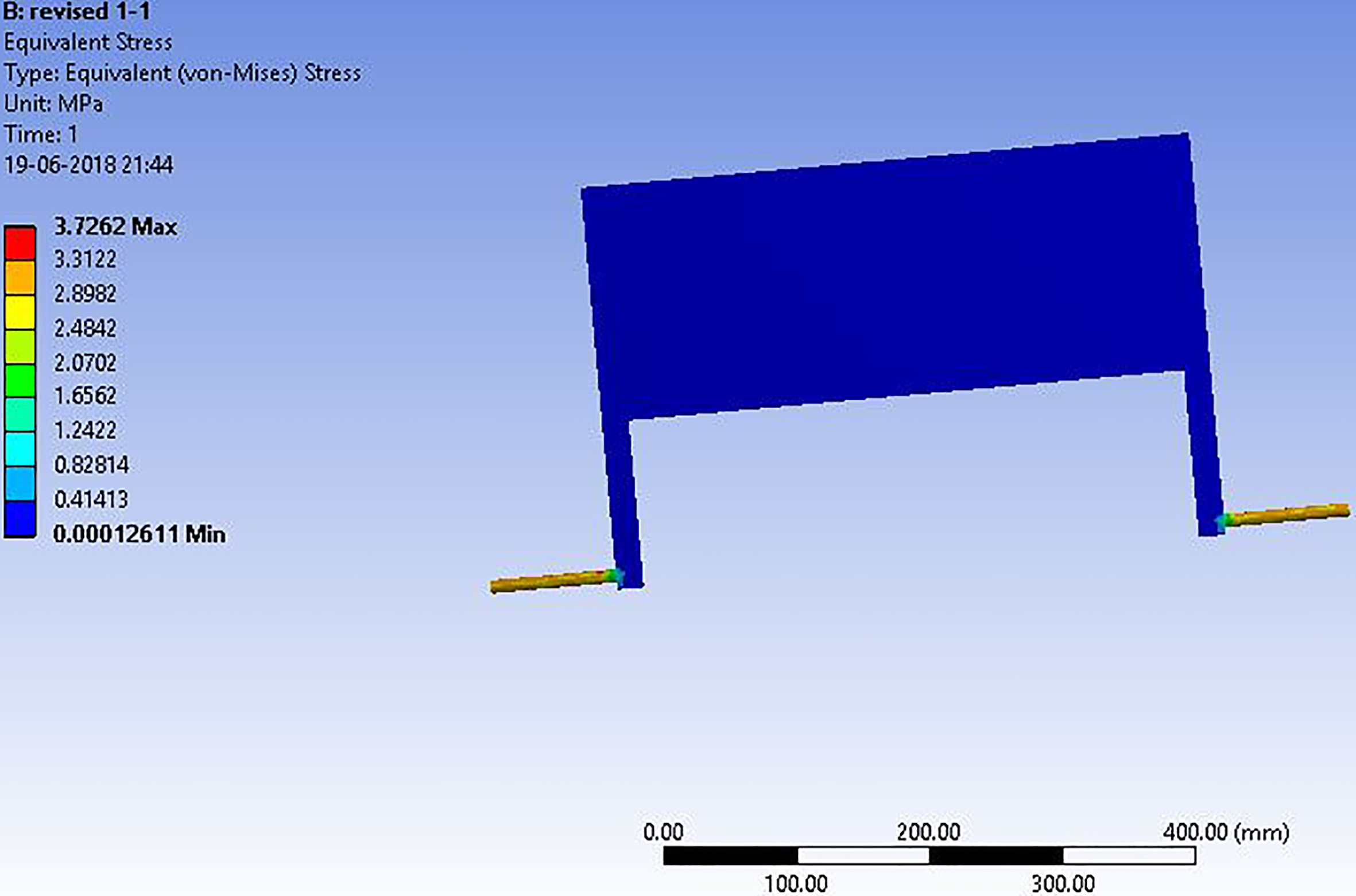
Von Mises stress obtained after static structural analysis of link 5 (after optimization).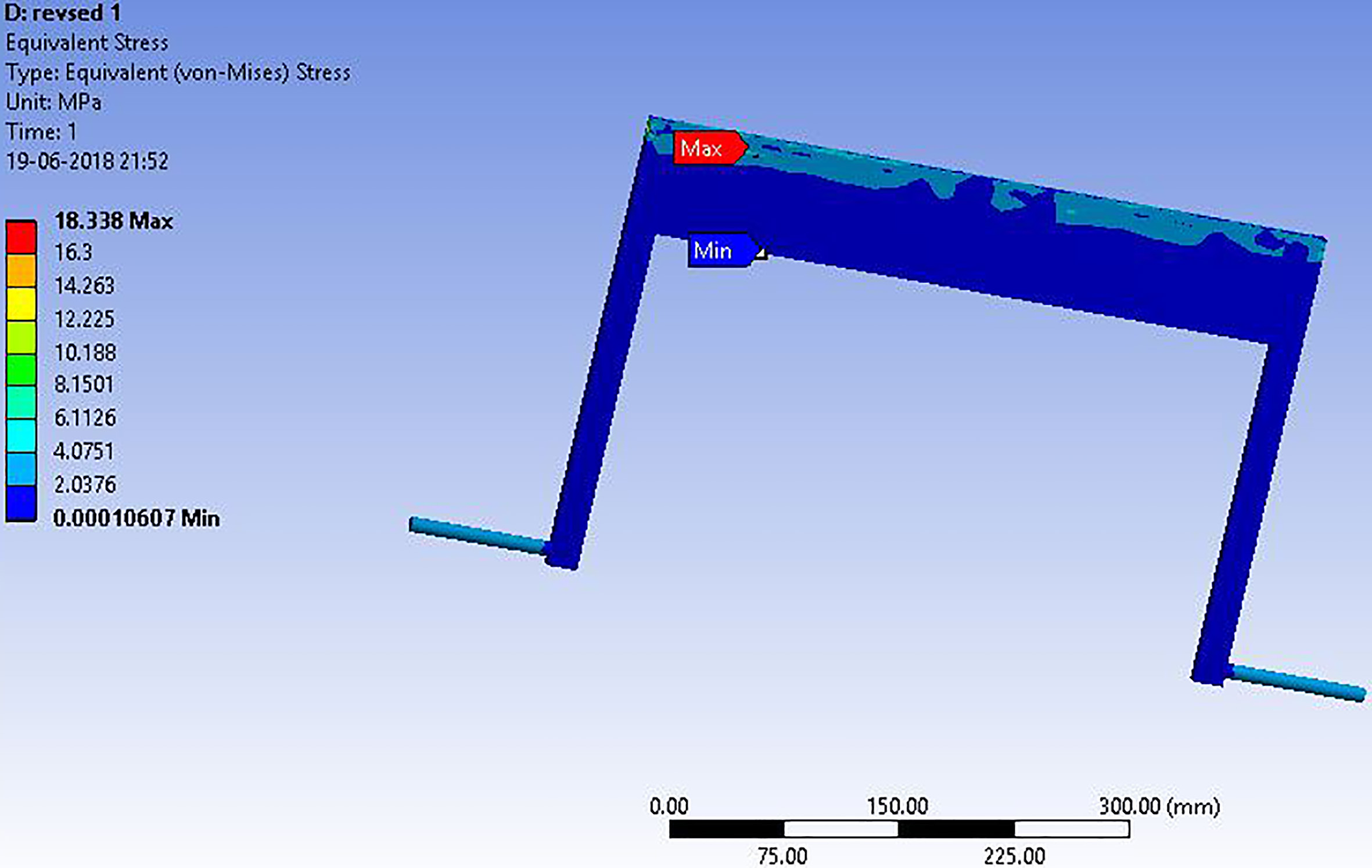
(a) 3D printed prototype with standing configuration; (b) 3D printed prototype with sitting configuration; (c) 3D printed prototype with sleeping configuration.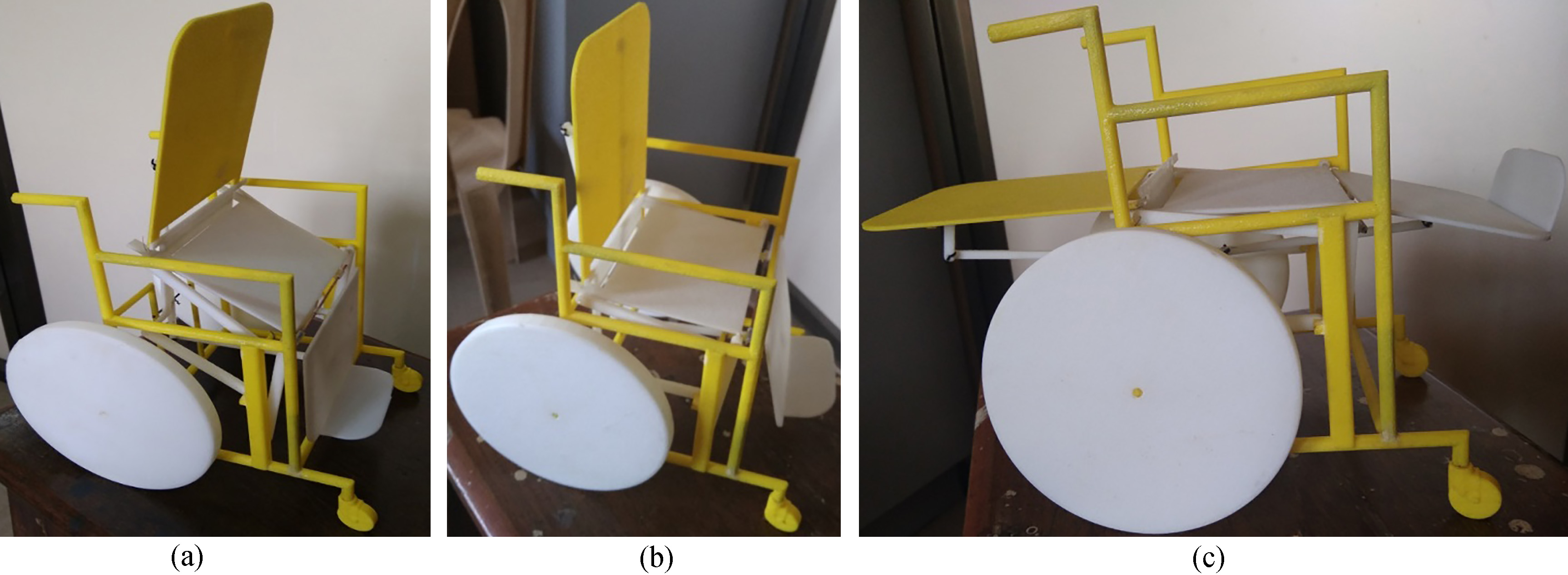
The main function of wheelchair frame is to support the mechanism linkages and to balance the weight of the user throughout the entire cycle of operation. The frame was modeled with hollow pipes of AISI 1018 MS material since hollow pipes gives a better weight to strength ratio to make the wheelchair lighter in weight and endurable. To make the proposed wheelchair as practical solution for developing countries, AISI 1018 mild steel was selected considering the lower cost of the material, good combination of mechanical properties and ease of availability. AISI 1018 mild steel has excellent weld-ability and a good balance of toughness, strength and ductility. The newly designed frame should be able to sustain the load during entire the cycle of operation with the minimum elastic deformation. Hence, the frame design was verified for the structural stability using static structural analysis. To find the external load to be applied on the five link mounting points (A, B, C, D and E as shown in Fig. 3) on the wheelchair frame, a multi body dynamic (MBD) simulation results were used. Considering the user load of 100 Kg and an actuator torque as 625 Nm, forces exerted at five mounting points on the frame (A, B, C, D and E) during MBD analysis were plotted in Fig. 15a–d. Static structural analysis of a frame with all boundary conditions (Fig. 16) using ANSYS was conducted by employing the maximum forces exerted at linkages mount points obtained during MBD analysis. The maximum Von Mises stress of 132.78 MPa was generated at front part a lower pipe of frame with maximum 0.45 mm deflection as indicated in Figs 17 and 18 respectively. The result shows that maximum von Mises stress (132.78 MPa) was well below the yield stress of AISI 1018 mild steel (365 MPa) with negligible maximum deflection.
Joint forces acting on each link throughout the cycle are obtained from the dynamic analysis. Employing these joint forces, static structural analysis of each link for different geometries with all boundary conditions (Fig. 19) was conducted for shape optimization to achieve maximum weight reduction. Since maximum stress level for link 5 (Fig. 20) was far away from material yield point, there was ample space for shape optimization. Figures 20 and 21 show the transformation in shape of the link 5 during the shape optimization process. In the same way, all the mechanical links (link 1 to link 10) were optimized to reduce the overall weight of the wheelchair. Table 5 gives the maximum and minimum von-Mises stress after optimization of each link of a mechanism and frame, which confirmed that all links and frame were safely below the yield stress of AISI 1018 mild steel. Based on shape optimization results, we managed to reduce weight about 9% which is 1.44 Kg from the original model (16 Kg).
The maximum and minimum von-Mises stress after optimization of each link of mechanism and frame
The maximum and minimum von-Mises stress after optimization of each link of mechanism and frame
For the purpose of functionality testing of a kinematic concept presented in present work, 3D printing technology used to develop a functional model of wheelchair. It allowed constructing the functional model (using ABS material) for mechanism movement realization. All the wheelchair parts were re-orientated to prevent the scaffolds during their 3D printing. After 3D printing, the parts were reprocessed using operations like drilling, cutting, processing using acetone primers, etc. All reprocessed parts were assembled as a functional model of the proposed wheelchair. At this stage, the wheelchair 3D printed model was tested and it was confirmed that proposed model moves as required with end desired configurations (see Fig. 22a–c). The authors are in process of fabricating the actual prototype (using MS AISI 1018) to validate the efficiency, configurability and adaptability of the proposed design.
Conclusions
In the early part of product design, the QFD and TRIZ methodologies were employed to structure and explore user needs to identify critical design parameters and to solve possible design contradictions. The QFD-TRIZ based a novel kinematic mechanism illustrating mechanical linkages structure for new a reconfigurable wheelchair was presented. The dimensional synthesis of presented kinematic mechanism was carried out using graphical synthesis method. The top-down modeling approach was implemented in the assembly modeling of a wheelchair. To calculate the required actuator torque during cycle of operation, multi-body dynamic (MBD) simulations were done in MSC ADAMS considering user load 100 kg. A maximum motor torque of 625 Nm was recorded during the entire cycle of operation. Structural stability analysis using ANSYS was conducted for the frame employing the maximum forces exerted on the link mounting points during the entire cycle of operation. Further, all the mechanical links (link 1 to link 10) are optimized to reduce the overall weight of the wheelchair using joint forces on each link throughout the cycle obtained from the multi-body dynamic (MBD). The wheelchair 3D printed model was tested and it was confirmed that proposed model moves as required with desired end configurations. The presented inventive solution to the problem of long-term wheelchair users has a promising potential to enhance independence of disabled people.
The limitation of the present study (and thus the implications for future work) is no user test has been done so far with this new wheelchair and hence authors have not evidence of real field effectiveness of product. In future work, user tests will be carried out using the developed wheelchair (before commercialization can be considered) to test real field effectiveness of product.
Footnotes
Conflict of interest
None to report.