
Abstract
BACKGROUND:
Prosthetists conventionally evaluate alignment based on visual interpretation of patients’ gait, which is convenient, but largely subjective and depends on prosthetists’ experience.
OBJECTIVE:
In this paper, we explore the feasibility of using a support vector machine (SVM) approach to automatically detect misalignment of trans-tibial prostheses through ground reaction force (GRF).
METHODS:
Alternate classification algorithms with varying kernels and feature sets were compared to assess the suitability for detection of a representative misalignment (six degrees of ankle plantar flexion) from normal alignment. A classical feature selection algorithm, Fisher Score, was further introduced to identify valuable features and reduce the dimension of feature sets.
RESULTS:
The SVMs achieved a detection accuracy of 96.67% at best within the same subject and 88.89%, respectively, for inter-subject. Combined horizontal and vertical components of GRF features provided the maximum detection accuracies. Propulsion peak force was identified as key variable of gait for misalignment prediction.
CONCLUSIONS:
As a proof of concept, the results demonstrate potential in applying this approach to detect prosthetic misalignment based on gait patterns, and is a step towards future developments of tools for early prevention of misalignment in clinical.
Introduction
Alignment of the lower limb prosthesis refers to the spatial orientation of prosthetic components and socket with respect to one another, as the patients’ gait presents with a wide variety of biomechanical properties [1]. A prosthesis that is not optimal aligned may elicit adverse effects after long-term use, such as gait deviations and increased energy expenditure, etc. [2, 3]. In clinical, prosthetists conventionally evaluate alignment based on visual interpretation of patients’ gait patterns, although convenient and clinically acceptable, largely depends on prosthetists’ experience and skills.
To supplement the traditional method, Kobayashi et al. [4] presented the possibilities of assisting dynamic alignment through quantitative assessment of socket reaction moments. Commercially available equipment with minimal modification to prostheses such as the Compass system (Orthocare Innovations, Mount Terrace, WA) or the iPecs “mobile gait lab” (RTC electronics, Dexter, MI) is similarly produce measureable differences in outcome that can be quantified in clinical setting for alignment optimization [5, 6, 7].
With the development of computer intelligence technologies, a number of gait recognition studies succeeded in differentiating pathological gait by using machine learning methods, and thus motivated us adapting this method to automatically recognize misalignment of prostheses. Begg and Kamruzzaman [8] described the SVM method for automatic recognition of age related gait changes using varied types of gait features. While this method is promising, the appropriateness of selected classifiers and the suitability of extracted features require further investigate [9, 10].
The purpose of this study is to lay the methodological foundation for prosthetic misalignment recognition. We hypothesized that gait with a representative plantar flexed alignment of the prosthetic ankle could be successfully identified from normal through SVM classifiers and GRF features, as changes of alignment would reflect on prosthetic gait patterns. Then suitability of selected features and kernels can be determined by assessing the performance of SVMs. Valuable features for misalignment detection would be identified through feature selection algorithm.
Methods
Gait data acquisition
Gait data used for this study had been recorded from a sample of eleven unilateral trans-tibial amputees in the context of a different Institutional Review Board approved study [11]. Inclusion criteria was an activity classification of K2 to K4, current experience of prostheses use for more than one year, and stated ability to walk for at least half an hour without limb pain. Individuals who used a prosthesis that was not suitable for installation of an integrated load cell for measurement were excluded.
Subjects were asked to repeatedly walk along a 50-meters hallway at a self-determined speed and approximately twenty steps were recorded each trial. Between walking trials, the prosthetic alignment was perturbed by changing the ankle angle in the sagittal plane. It was assumed that subjects’ original prostheses were optimally fitted and aligned. All protocol alignment changes were administered by the same credentialed prosthetist. A six-degrees-of-freedom load cell (iPecs) was used to collect continuous kinetic data during walking. Nine subjects completed the protocol (8 males, 1 female, mean age 54.7
Representative GRF components for subject 9 in sub-division of stance phase graphs showing the key gait features extracted: a) mediolateral component (M-L); b) anterior-posterior component (A-P); c) vertical component (V).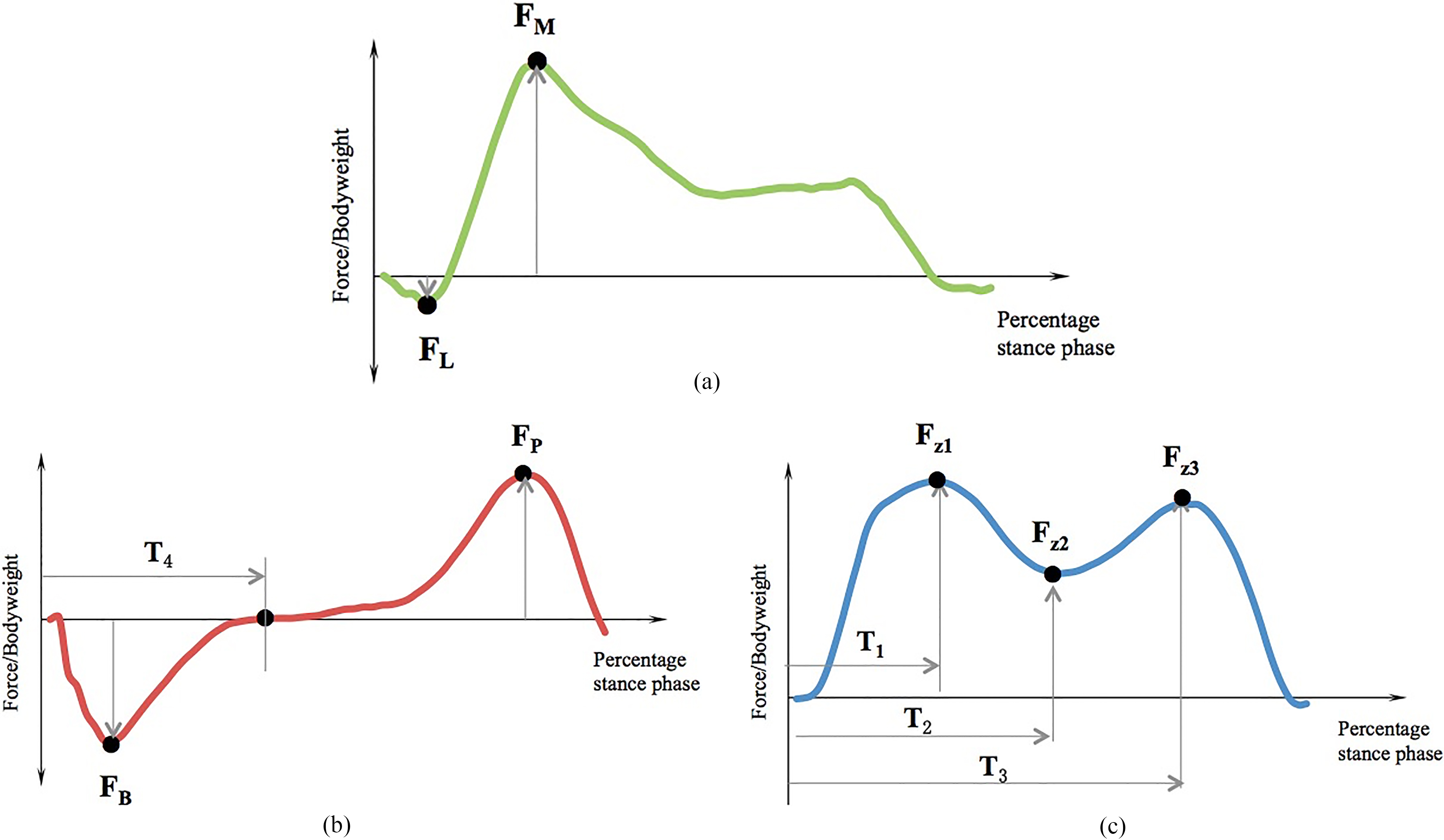
For the purpose to detect RMA from NA, gait features including peak forces during braking, mid-stance, and propulsion phases (Fig. 1) as well as their corresponding timing within the gait cycle were extracted from raw gait data.
Mean values of time and gait variables for NA and RMA experimental conditions
Mean values of time and gait variables for NA and RMA experimental conditions
As the input to SVM classifiers, a total of thirteen gait features describing vertical and horizontal aspects of GRF were extracted from each gait cycle (Table 1). Those included six commonly used vertical GRF variables: T
Three experimental levels of feature sets – complete (13 features), vertical (6) and horizontal (7) features alone were compared to assess the suitability for misalignment recognition.
Feature selection appears to be useful for identifying important discriminatory features or reducing the feature space dimension [12]. To identify valuable feature, use of Fisher Score (FS) has been proposed. Given a data set of N records
Where
To automatically detect misalignment, SVM classification algorithm was introduced [14]. While the employed kernel plays an important role in governing SVM model’s behavior, no analytical or empirical study has concluded that any one kernel was superior over the others. Therefore, three kernels: 1)
In the process of training and testing the SVM [15], gait data sets were labeled “
Results
Linear kernel achieved the highest intra-subject detection accuracy (96.67%). Performance of SVMs (Table 2) showed a slight difference of accuracy within a range of 90.56% to 96.67% across all three kernels. Sensitivity and specificity were in a similar range. As the intra-subject classification was conducted for all subjects individually, each entry contains the average value of performance indices. The inter-subject gait detection accuracy was at best 88.89% (in polynomial and RBF kernels) when all thirteen features as input. Horizontal and Vertical features alone did not provide maximum classification accuracy (85.56% and 72.78%). The sensitivity and specificity of combined features approached even levels across all kernels.
Performance of classification algorithms in intra-subject and inter-subject classification tasks with varied kernel functions and feature sets as inputs
Performance of classification algorithms in intra-subject and inter-subject classification tasks with varied kernel functions and feature sets as inputs
VF: vertical features; HF: horizontal features; V
100% accuracies were achieved for the majority of subjects (6/9) in intra-subject detection with only two best features, and feature most involved was F
In this study, we explored the feasibility of using SVM approach to automatically detect misalignment in trans-tibial prostheses, which aimed to complement traditional evaluation. Our results showed that SVMs were able to discriminate a representative misalignment from normal. F
One major aim of our study was to assess the suitability of selected feature sets and kernels. Table 2 showed that vertical and horizontal features individually did not offer the maximum accuracy, but combined the two subsets did. Results indicated that features derived from horizontal and vertical GRFs complemented each other. Similar findings have been reported for discriminating old/young gait patterns by SVM based on gait data [8]. In the context that machine learning methods have been previously used to detect pathological gait [18, 19], however, were mostly only considering the vertical but no horizontal GRFs, which may miss important information. Peak forces in M-L direction have been investigated mostly for their hypothesized association with movement stability [20].
It is beneficial to use a small number of features, which can provide maximum distinguishable identification [12]. By utilizing Fisher Score, the greatest overall classification accuracy of inter-subject detection was achieved with top three ranked features, F
In this paper, we explored the feasibility of a novel method to automatically detect prosthetic misalignment. Our results showed that the proposed SVM approach has potential for distinguish misalignment from normal. Combining horizontal and vertical components of GRF features as input improved performance of SVMs. Propulsion peak force was the key variable in gait recognition involved prosthetic malalignment.
Footnotes
Conflict of interest
None to report.