
Abstract
BACKGROUND:
Falls during transfer to and from a wheelchair are associated with numerous problems. Factors responsible for difficulty in transferring include horizontal/vertical gaps between surfaces; obstacles, such as armrests; and complicated brake/footrests configurations before transferring. Moreover, controlling a wheelchair sufficiently close to the transfer surface within the confined home space is difficult.
OBJECTIVE:
We described the design of the novel Lateral Transfer Assist Robot (LTAR) for solving problems during transfer. Furthermore, the effectiveness and usability of the robot were preliminary examined in healthy adults.
METHOD:
The transfer problems and basic designs were organized. The effectiveness of the prototype was measured by three-dimensional motion analysis and questionnaire.
RESULTS:
The prototype LTAR was developed. With just a push on a button, the footplate lowers to the floor and the seat and armrest lowers to the height of the seating surface to fill the gap between the surfaces. Using these features, users can transfer by simply shifting their buttocks sideways. Additionally, LTAR has omnidirectional wheels that help move it within a narrow space. The LTAR was confirmed to reduce the physical and subjective burden, except for maneuverability.
CONCLUSION:
The LTAR was found to be effective for home use and reducing burden of transfer.
Introduction
People with mobility disability often use a wheelchair as a means of transport. According to previous studies, 6.1% of American and 4.6% of Canadian elderly individuals use a wheelchair [1, 2]. Although a wheelchair is crucial for mobility, it has two main disadvantages, especially when using it at home.
First, wheelchairs are associated with issues related to transferring. Numerous accidents occur during transfer to and from the wheelchair. Previous studies have reported that the frequency of transfers for wheelchair users is 14–18 times per day [3, 4]. A study revealed that for wheelchair users, approximately 55% of falls occurred during transfers, and 1.2% of falls resulted in fractures [5]. Most wheelchair-related injuries among those aged
Another disadvantage of wheelchair use in the home involves the difficulty in positioning the wheelchair appropriately for transfer within a narrow indoor space. This “space problem” is evident particularly in Asian countries. For example, in Japan, standard wheelchairs are constructed in accordance with the Japanese Industrial Standard (JIS) with a width of 630 mm or less and a minimum turning radius of 750 mm. However, the average size of a Japanese apartment is only approximately 45 square meters [14], and furniture, such as beds, dining tables, and home appliances, further restrict the movable space, while the average size of a living space in Europe and the United States is about 80 m
To overcome these two disadvantages of standard wheelchair use in homes, we developed a new robot, named the Lateral Transfer Assist Robot (LTAR). In this study, we described the design and key function of this newly developed robot, Furthermore, the effectiveness and usability of the robot was preliminary examined in healthy adults.
Methods
Concept for the development of LTAR prototype
Regarding the issues related to transferring, it has been pointed out that structures of the standard wheelchair, including the wheels and armrest, make transferring difficult. The difficulty is dependent on the horizontal/vertical gaps and the presence of obstacles (armrest) between transfer surfaces [17]. The gap width
Omnidirectional movement is the key to resolve the problem associated with limited space within homes. The function enables devices to move easily and efficiently even in limited spaces. Furthermore, such movement can easily minimize the horizontal gap between the device and transfer location. To transfer laterally, it is necessary to bring the side of the device into close contact with the side of the target surface. However, this positioning is difficult for the standard manual and electric wheelchairs because most of them can move only forward, backward, and rotate. Therefore, the caregiver often needs to lift the wheelchair to bring it into close contact with the side of the target location. The prototype LTAR was developed keeping these concepts in mind.
The prototype Lateral Transfer Assist Robot (LTAR). In this figure, the left armrest is lowered to the height of the bed surface and fills the gap between the bed and the robot. Additionally, the footrest is lowered to the level where it touches the ground. 
A kinematic analysis was conducted to examine whether lateral transfer is effective in reducing the physical demand compared to the getting-up transfer method. Eight healthy adults (mean age 27.1
The Lateral Transfer Assist Robot control box. The control box has a joystick for maneuvering and four buttons for controlling the transfer destination. A, three-axis joystick for driving the device; B, transfer height button to select the height of seat for transferring; C, transfer mode button to start the transferring toward the corresponding side; D, driving mode button to start the driving. 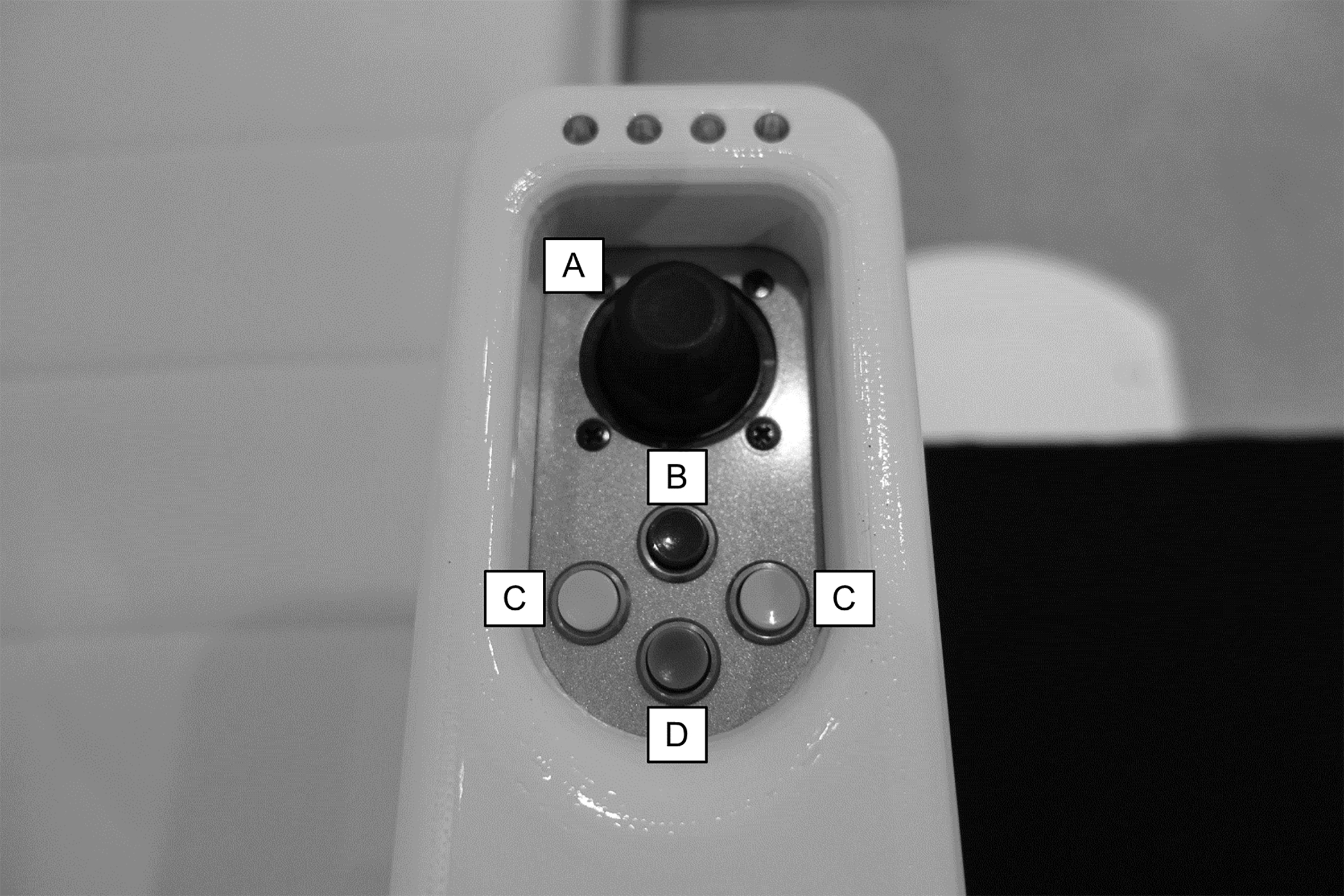
The usability of the LTAR was investigated via a questionnaire administered to the participants after performing transfers for the motion analysis. The questionnaire items were created based on previous studies [18, 21]. The following items were included: (1) shape and color of the device; (2) size, height, length, and width; (3) comfort; (4) ease of operation for mode change buttons; (5) ease of joystick maneuvering; and (6) usefulness of the device to reduce the burden. The following items on the five-point Likert scale were used for grading: 1, not satisfied at all; 2, not very satisfied; 3, more or less satisfied; 4, quite satisfied; 5, very satisfied.
The study protocol was approved by the Human Ethics Committee of Fujita Health University (No. HM16-311).
Development of the LTAR prototype
Basic specification
The specifications of the prototype were: length, 866 mm; width, 570 mm; height, 800 mm; seat height, 366–470 mm; and weight, 60 kg (Fig. 1).
Mechanism for seamless lateral transfer
The function to eliminate the gaps and armrest were developed and operated with several buttons in a control box (Fig. 2). After using a joystick to position the side of the robot in contact with the transfer destination, the user presses the button corresponding to the transfer direction to adjust the height of the seat to match the height of the target surface. Then, the footrest descends to the ground level, and the armrest descends to the level of seat surface automatically (Fig. 3). In addition, memory function was developed so that the robot can memorize three seat height patterns, and thus, the user can set the memory for the most commonly used transfer destinations.
Transition of Lateral Transfer Assist Robot state and transferring with the device. A) When pressing the transfer mode button in the corresponding direction, the seat surface is adjusted to the preset height level, the footrest is lowered to the floor level, and the armrest is lowered to the height of the seat surface and fills the gap between the bed and the robot. B) Continuous photograph showing the flow of lateral transfer movement. The user can transfer without standing up.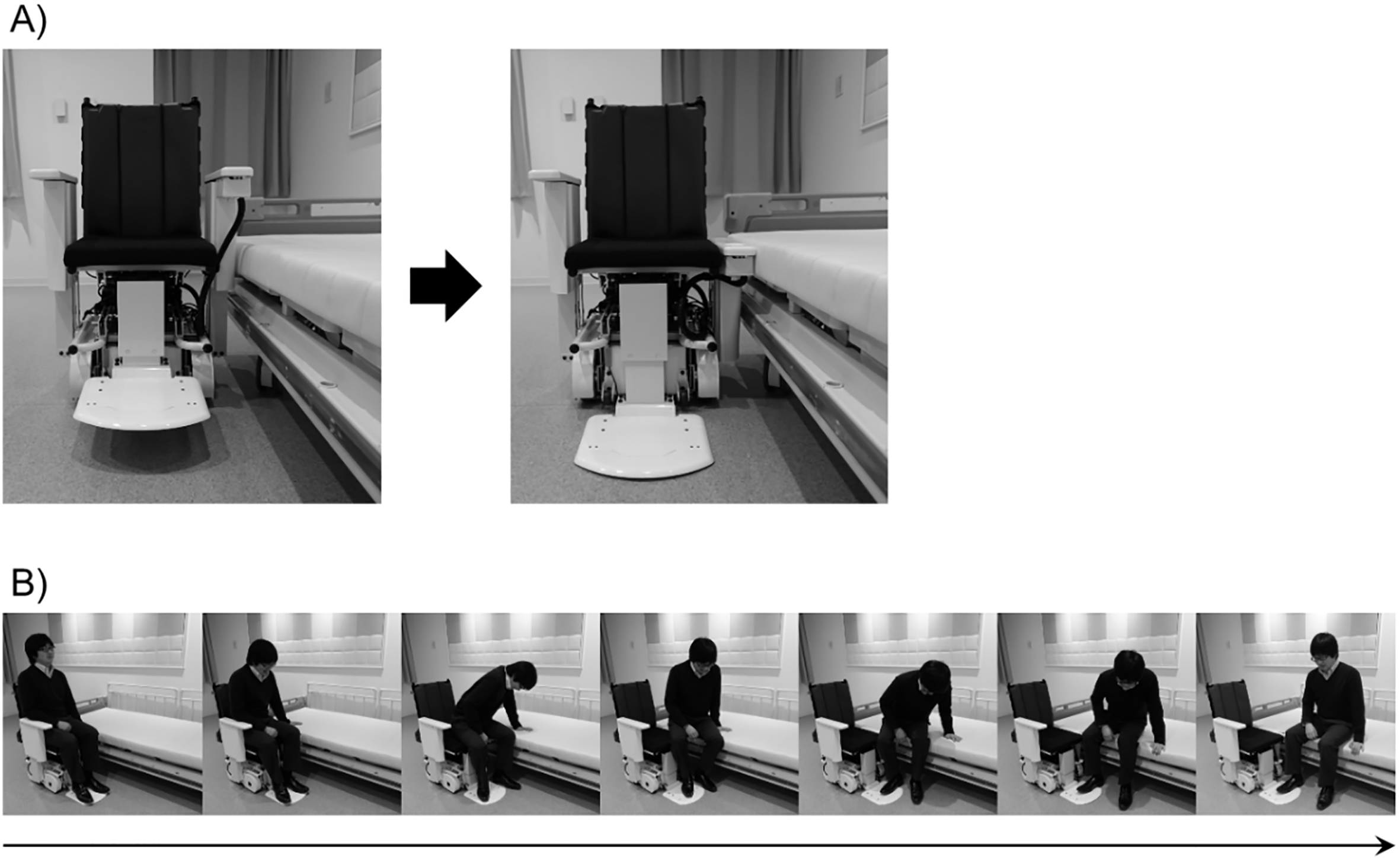
We adopted omnidirectional wheels, i.e. mechanum wheels, which resemble free rollers arranged in a barrel shape and inclined at 45 degrees to the outer circumference of each wheel (Fig. 4A). Omnidirectional movement was achieved by controlling the rotation direction and speed of each of the four wheels. Rotating all the wheels forward or backward will result in movement forward or backward. Lateral movement occurred when one wheel faced forward, and the other wheel was reversed with wheels facing away from each other, so that the vector of the thrust was in the left-right direction. When the wheels on the right and left side of the front and rear wheels are paired and simultaneously rotated forward and reversed, the wheeled platform spins to the right or left. With this function, the side of the robot and the edge of the target surface could be brought into close contact with each other. In addition, since the axis of rotation was located at the center of the wheels, rotation with a very small turning radius was possible. With the mechanum wheels, the prototype could move with a maximum velocity of 4.2 km/h, and the turning radius was found to be 550 mm. The user controlled the device using a three-axis joystick – by tilting the joystick back, forward, right, or left the user could move the robot in the corresponding direction, and twisting the joystick caused the robot to rotate (Fig. 4B).
Items and responses of a questionnaire on the device usability
Items and responses of a questionnaire on the device usability
The mechanum wheel and the control image. A) The mechanum wheel for omnidirectional movement. The mechanum wheel comprises of free rollers shaped like a barrel and inclined at 45 degrees to the outer periphery of each wheel. B) The control image of LTAR. Driving is controlled by the three-axis joystick (see Fig. 2A). Tilting the joystick in the forward, backward, left and right, and twisting the joystick, can move the robot forward, backward, sideways, and make it rotate, respectively. 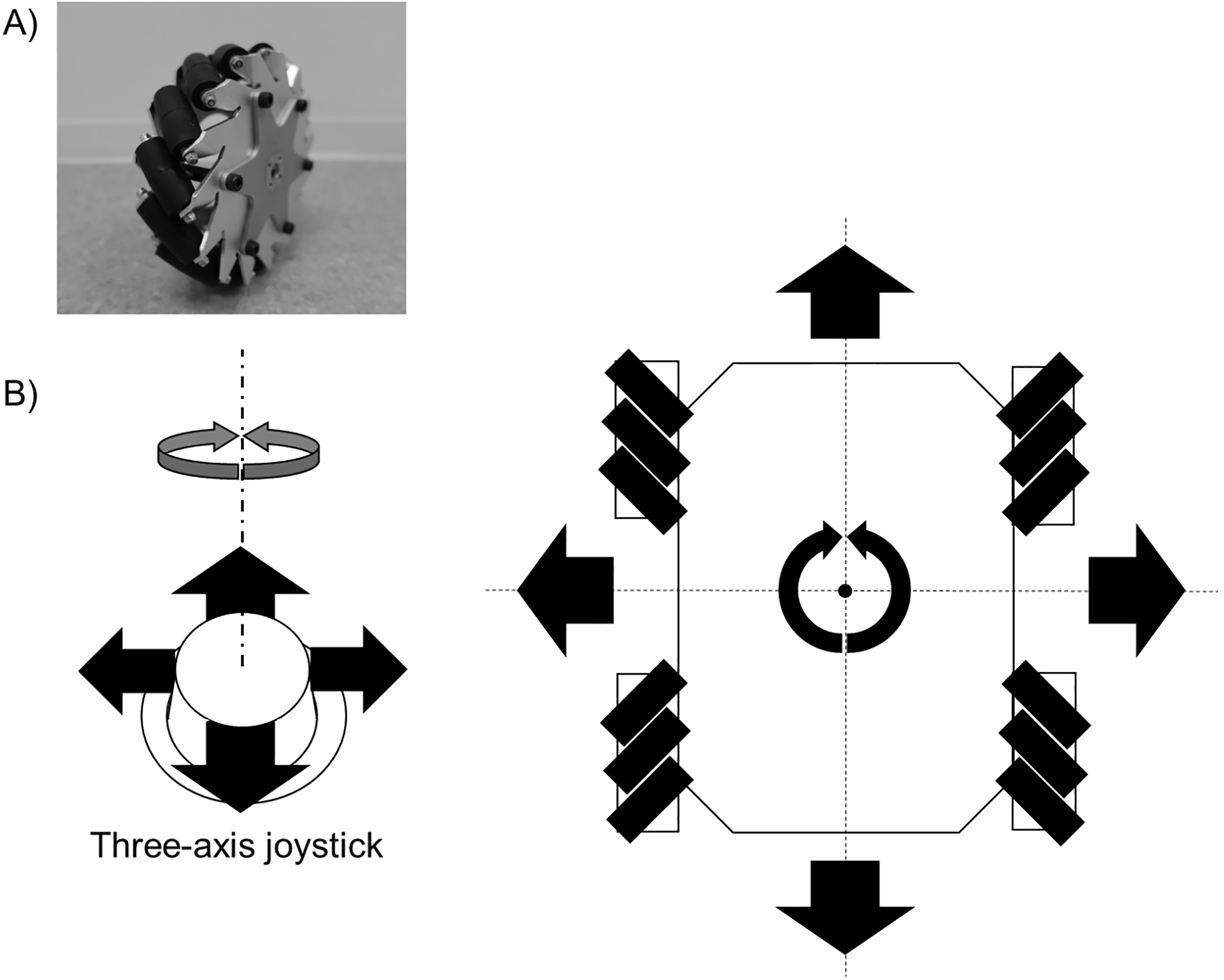
The experimental results are shown in Fig. 5. The vertical movement of the lumbar marker was 0.07
Comparison of the vertical movement between getting-up and lateral transfer. The bars show the mean vertical movement of the lumbar markers during the getting-up or the lateral transfer in eight healthy participants. Error bars indicate standard deviation. 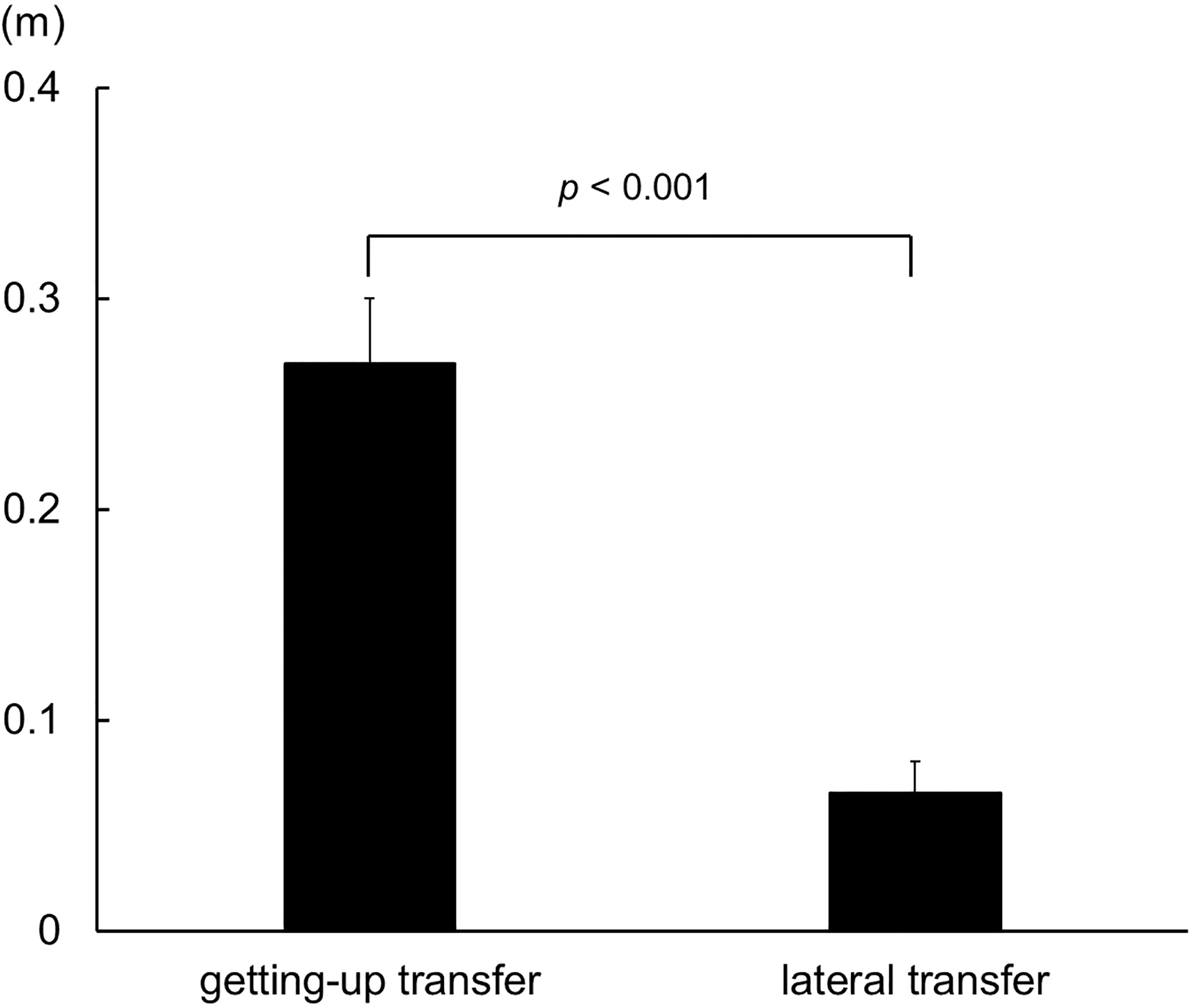
The responses to the questionnaire are shown in Table 1. Regarding the usefulness of the device, the median score of the responses were “quite satisfied.” As for the basic features like shape, color, size, height, length and width, the participants were “more or less satisfied.” For comfort and the ease of button operation, the response was between “not very satisfied” and “more or less satisfied.” The worst score was observed in the ease of joystick maneuvering, the median score was “not very satisfied.” Some participants complained that maneuvering was difficult or delicate with the small joystick.
We developed the LTAR, which is the first robot that supports lateral transfers in a narrow space. We further preliminarily examined the effectiveness and usability in healthy adults. Using the LTAR, participants could perform lateral transfer and required significantly less vertical movement than when using the standard wheel chair, where participants are required to perform the getting-up transfer.
There have been reports on several transfer assist robots. Grindle et al. reported about the Robotic Assisted Transfer Device, which aids the transfer of people with disabilities to and from their electric powered wheelchair onto other surfaces. The device has a mechanical arm on the electric powered wheelchair and can be used for fully dependent transfers, where the person being transferred is in a sling and weight is completely on the robot [15]. Bostelman et al. reported the Home Lift, Position and Rehabilitation (HLPR) chair that provides mobility and lift for patient transfer. The HLPR chair was built on an off-the-shelf forklift. The forklift includes a U-frame base with two passive casters in the front and an actively steered and forward driven rear wheel. By turning the chair installed in the forklift by 180 degrees, it is possible for the passenger to turn to the transfer target without standing [16]. Development of these devices has been promoted in consideration of the risk of falls during transfer. However, the concept of these devices appears to be different from ours. These devices fully support the transferring, while our device helps the user’s transferring. From the view point of rehabilitation, staying as active as possible is very important for disabled people. Furthermore, these devices are too large for home use. Compared to those previously reported, the LTAR enables a safe lateral transfer and can be used in confined spaces including typical Asian apartment homes.
As established by Burkman et al. in the study of people who mainly use manual wheelchairs, the greatest concern was the size of the device limiting the places where the device could be used [22]. Because the mechanum wheels enable omnidirectional movement and save space, this feature is considered an effective space-saving approach and better for indoor use. The turning radius the JIS standard wheelchair is 750 mm, while the LTAR achieved a turning radius of 550 mm. This reduction in the turning radius is advantageous in moving within a narrow living spaces and corridors Japanese houses. Another advantage of this device is that it has sufficient speed for indoor use with a maximum velocity of 4.2 km/h, while suppressing the turning radius.
Some problems associated with this prototype include seat height adjustment and maneuvering with the joystick. Regarding seat height adjustment, although the current version can memorize three height patterns, it lacks versatility. The user cannot adjust the seat height well. Since the technology of a seat height position sensor has been developed, incorporation of this type of sensor should be considered for the next prototype. In addition, the questionnaire indicates that improvement in the easiness of operability is necessary. In particular, maneuvering with the three-axis joystick was difficult. The prototype’s joystick was 20 mm tall, and the size might be too difficult for elderly individuals to handle. Based on the results of the study, we are planning to improve the robot especially in terms of operability and demonstrate the practicality of the device by evaluating the ease of use for real wheelchair users.
Footnotes
Acknowledgments
We thank the staff of the Department of Rehabilitation at Fujita Health University Hospital for their contribution to data acquisition and discussion for this study.
Conflict of interest
The authors declare that they have no competing interests.