
Abstract
BACKGROUND:
An assessment of needs to develop a system that provides consultations using a telepresence robot and education for health professionals was conducted. The absence of a structured methodology for user-needs analysis has been identified as a problem.
OBJECTIVE:
To use a telepresence robot for medical consultation in future usability testing, the robot has been developed by analyzing end-user needs in a multifaceted manner.
METHODS:
In designing the telepresence robot for consultation, required functions and forms were defined based on the results of a user-needs survey. The robot was implemented based on specifications of needs. The prototype robot was developed and after repeated internal tests, the final version was completed.
CONCLUSIONS:
The present study holds significance as it systemized user needs, applied them to a new medical technology’s components and functions, and provided a technology development process that could improve usability.
Introduction
Tele-health refers to providing remote healthcare services using information communication technology (ICT). Tele-health has been introduced to reduce costs, improve efficiency, and provide better access to healthcare services [1]. Among the various types of robots, those that apply telepresence technology help to closely connect users on both ends who apart from each other [2]. A telepresence robot allows health professionals to remotely move, look around, talk, and participate in decision-making [3]. This research team conducted an assessment of needs through a questionnaire survey and interviews to develop a system that provides consultations using a telepresence robot and education for health professionals [4].
An end-user-needs analysis is widely recognized as a key element in user-centered design (UCD) [5, 6]. However, it is difficult to identify user needs in the early design phase of a new technology, because developers and designers tend to perceive development as a process essentially centered around technology and regard user needs as trivial problems [5]. Thus, the absence of a structured methodology for user-needs analysis has been identified as a problem. In addition, since users have not experienced a new technology in development, users might not be able to imagine or express how the technology will function and be applied [7]. In other words, users may find it difficult to sense or communicate that a technology is innovative and helpful for users. In general, users tend to talk about needs for technologies and services that they are familiar with and understand well. In the early design process of a new technology, however, it is important to investigate users’ unmet needs [8]. Without clear encouragement to consider such needs, it would be difficult address users’ practical needs until development has progressed quite significantly and the technology has materialized. Prototyping can help in identifying user needs and in exploring ideas by visually presenting practical forms and functions. In this regard, we would like to analyze end-user needs in a multifaceted manner, develop a telepresence robot for medical consultation, and use it in future usability testing.
Summary of service specifications
Summary of service specifications
I: Interview, S: Survey.
Mapping of the robot’s requirements and function/hardware components.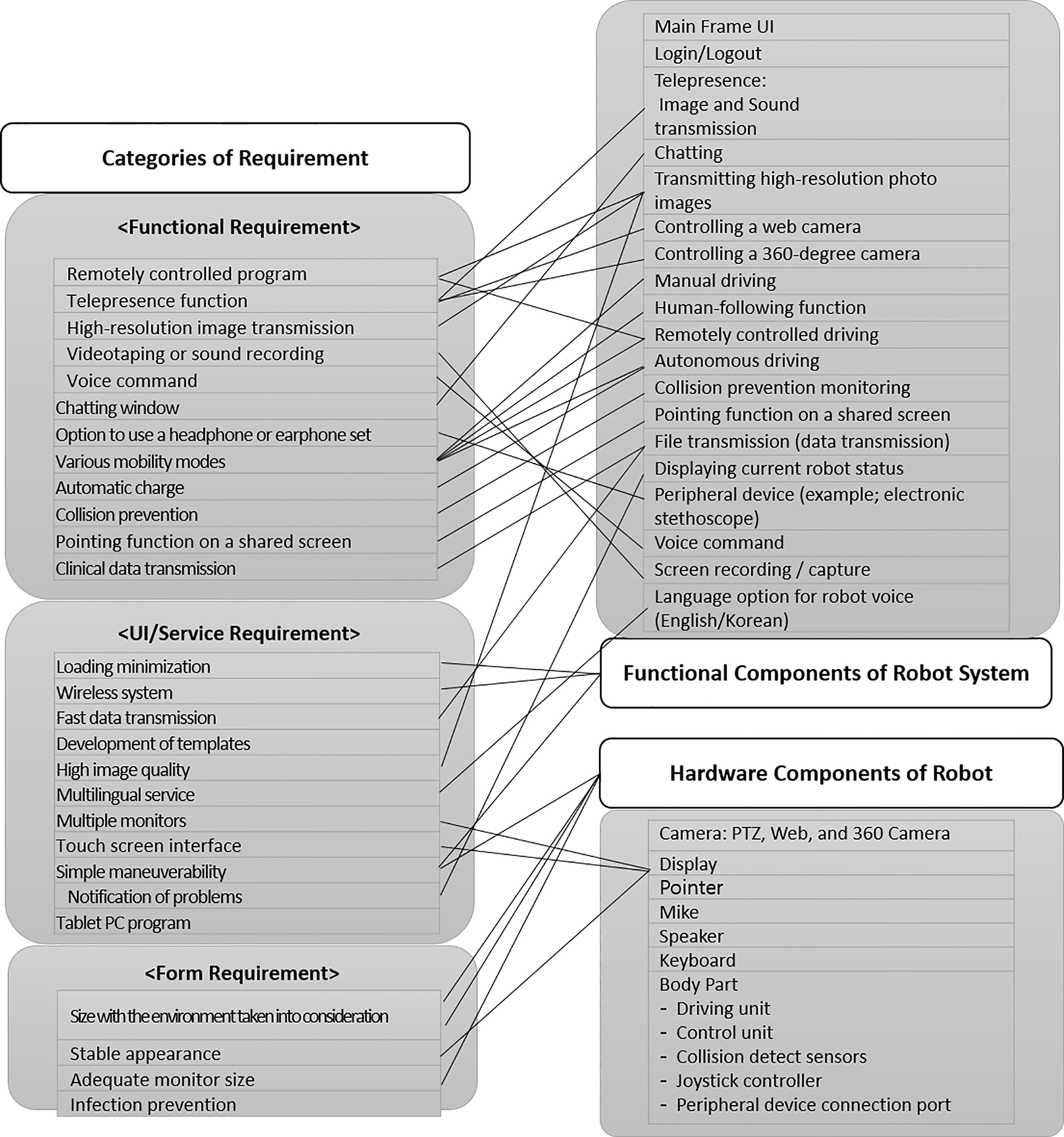
Robot design
The present study is a methodological study that applies user-centered design to the development of a robot. In designing a telepresence robot for medical consultation, its required functions and form were defined based on the results of a user-needs survey conducted in a previous study [4], and these needs were expressed so as to better communicate with developers. In addition, various situations were considered in developing the robot so that it could respond to them.
In designing the telepresence robot for consultation, required functions and forms were defined based on the results of a user-needs survey. To better communicate with developers, requirements and keywords describing them were specified as in Table 1. To implement such specifications, we had multiple meetings with the development team and mapped them as shown in Fig. 1.
Robot implementation
The robot was implemented based on specifications of needs. The prototype robot was developed in June 2018. After repeated internal tests and several development meetings, the final version was completed in January 2019. The final version of the robot was 179 cm tall, weighed 88 kg, and covered a 47
The operating system displayed at the bottom of the screen was Windows, and C++ was used as a system programming language. Figure 2 shows a screen of the consultation program. In Fig. 2, the program’s functions consist of the “video,” “document,” and “motion” tabs in the upper left corner of the first screen that appears when the user signs in. The user can touch each tab and switch the screen and mode. Under the video tab, the user can have a video or audio teleconference, and the left screen displays video recorded by the robot’s pan-tilt-zoom (PTZ) camera, 360-degree camera, or web camera. Under the document tab, health professionals can share images or document files during the teleconsultation and immediately open them or take notes. Under the motion tab, the user can control the robot’s movements and the cameras’ angle or zoom.
Layout of telepresence robot for consultation program.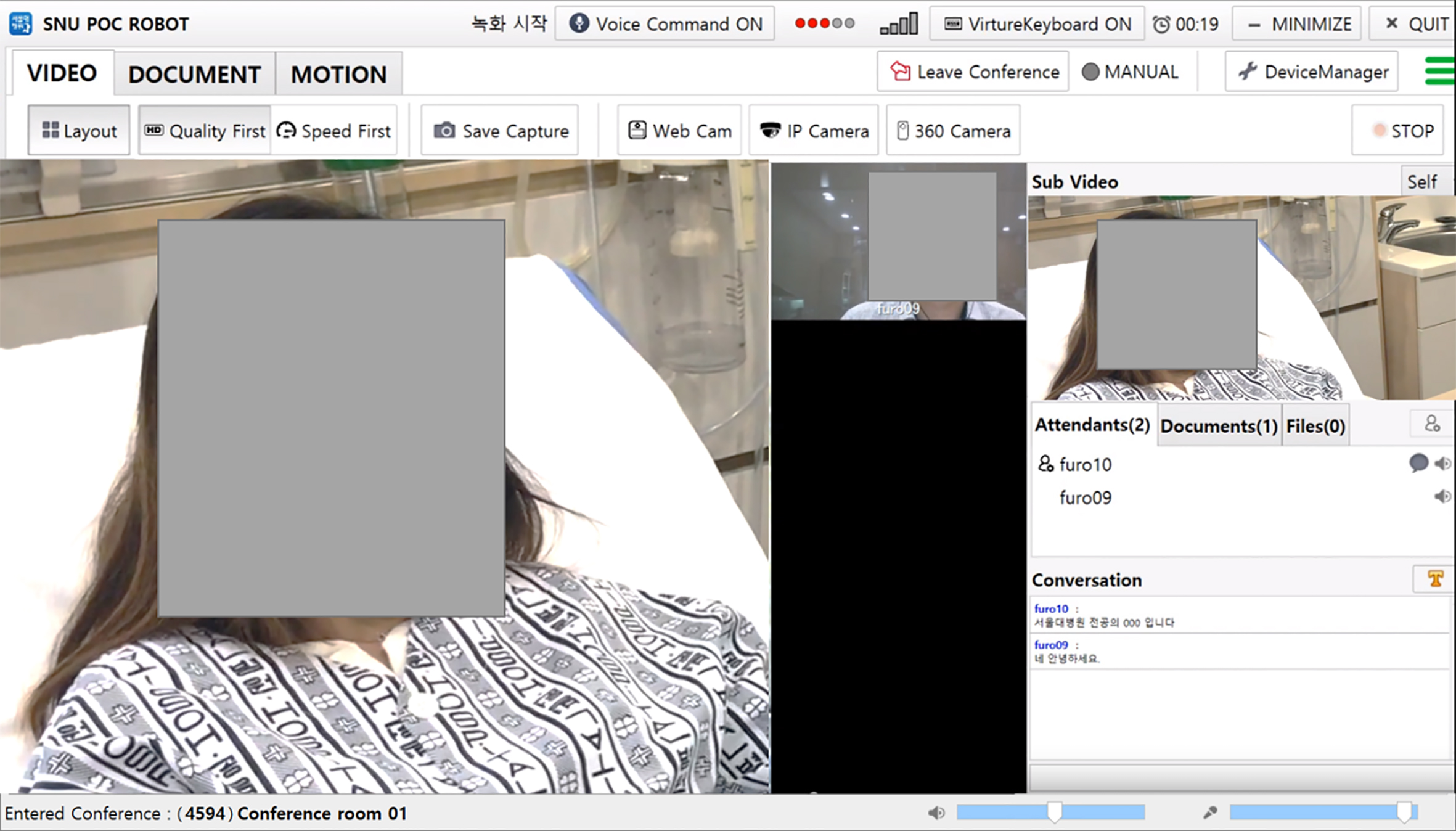
UCD highlights a system’s purpose is to serve users, rather than solely employing a particular technology or creating a visually pleasing program. User needs should drive the interface design, and it should in turn lead the design of the rest of the system [9]. In addition, UCD is an iterative process that aims to develop a useful system through the participation of potential users in the system design [10] and a process that focuses on usability throughout the entire development process and the life cycle of the system [11]. The present study applied UCD’s key principles – active user involvement, evolutionary systems development, simple design representations, prototyping, and evaluations of use in context—and developed a prototype telepresence robot for medical consultation that addressed the essential functions and needs identified from a user-needs survey.
The present study involved the designing and developing a prototype based on user needs, which can be regarded as an extension of the continuous and repeated analysis of user needs aimed at increasing health professionals’ acceptance of telepresence robots for consultation. Prototypes are one of the most powerful tools that allow users to express their what they need from a technology that they have never experienced before [5]. The biggest advantage of employing a prototype for user-needs analysis is that it can specifically and physically represent the function, form, and interactive features of a system. Such specificity may help the user and the developer to better understand and communicate the developer’s intention and the user’s needs [12]. Hence, prototypes can help in discussing a new technology’s functions and encourage users to express needs that have not yet been identified. The present study also found that prototyping is an efficient method for communicating and exploring various possible design ideas and solutions.
The present study holds significance as it systemized user needs, applied them to a new medical technology’s components and functions, and provided a technology development process that could improve usability. In the early design phase of a technology, the developer or designer tends to not properly understand user needs and to think of development mainly based on technology, which highlights the need for a structured methodology user-needs analysis. In the present study, health professionals, who not only understood consultation situations involving robots but also were very experienced in medical equipment maintenance, participated in the development process. In the future, a usability test of the prototype might help to collect ideas on various scenarios applicable to this technology. Furthermore, highly usable healthcare ICT could be developed based on the findings of the present study. The usability of the telepresence robot for consultation developed in the present study would need to be repeatedly tested and the effects of robot-based consultations assessed in further studies.
Footnotes
Acknowledgments
This research was supported by the Ministry of Trade, Industry and Energy (MOTIE) of Korea under Industrial Technology Innovation Program (No. 10063098, Telepresence robot system development for the support of point-of-care service associated with ICT technology).
Conflict of interest
None to report.