
Abstract
BACKGROUND:
The weakening of the ability of the elderly to perform gait is becoming a major cause of the increase in the frequency of falls.
OBJECTIVE:
In this study, we designed and manufactured a treadmill capable of restraining walking by providing a sudden repulsive force on the left and right legs of a pedestrian when walking for the fall prevention training of the elderly. Through this, it is possible for the elderly person to strengthen the lower extremity muscles to prevent and prepare for falling through the fall prevention training similar to the fall environment that may occur in daily life.
METHOD:
The development system includes a motor for generating a driving force in the form of a left and a right driving system and a belt separated from each other, an electromagnetic clutch for rapidly stopping the running belt of the motor transmitted to the running belt to stop the running belt, and a controller for controlling the driver.
RESULTS:
In order to evaluate the development system, the motor driving ability test and the power transmission, connection and shut-off performance of the electromagnetic clutch were carried out. The subject’s muscle activity of the lower extremity muscles was evaluated when the running belt stopped at the beginning of the right folding.
CONCLUSION:
It is expected that the developed dual function system would be helpful for the fall prevention exercise as well as the rehabilitation exercise for patients who have recovered from surgery or hemiplegic patients.
Keywords
Introduction
Compared to healthy young adults, elderly people are relatively weaker in basic physical functions such as maxillary strength, postural balance ability, and cognitive function. This has led to the weakening of the gait pattern of the elderly. The weakening of the ability of the elderly to perform the gait is becoming a major cause of the increase in the frequency of falls in the elderly. Falling accidents in the elderly can lead to fractures of the pelvis and major joints, which transform the user’s daily life from “standing” to “lying”. Daily living in ‘lying’ can limit social activities for the elderly and cause other complications, leading to even death. It has reported that falls occur more frequently in the elderly than 65 years of age, and more than 90% of the causes of hip fractures reported to cause by falls [1]. Most falls occur during walking [2] and hence gait impairment is associated with an increased fall risk [3]. Falls in elderly people often occur as a result of tripping and poor obstacle negotiation [4], with the lower leg of older adults passing dangerously close to impediments during walking [5]. Obstacle negotiation also relies on cognitive resources, including motor planning, divided attention, executive control, and judgment [6], partly explaining why age-related decline in cognitive function is associated with increased fall risk [7]. Among the risk factors for falls, the weakening of muscle strength and loss of balance ability and accompanying deterioration of walking function are increasing the risk of falls. In addition, due to the trauma caused by the experience of a fall, it lowers the quality of life in old age through a passive attitude toward going out and physical activity [8]. In order to prevent falls, it reported that sense of balance, gait function, and fall efficacy are important factors. A number of studies have reported that exercise function and physical strength improvement through regular physical activity is an effective method for preventing falls in the elderly [9]. Various types of gait-related systems have studied to prevent falls in the elderly [10].
Recent fall prevention or fall prevention systems include ICT-based smart belt systems, fall prevention aids, fall prevention wearable airbags, and fall prevention housing design technology [11, 12, 13, 14, 15]. Most of the studies are only on safety tools to prevent injuries in the event of a fall in the elderly, providing location information in case of a fall, and auxiliary products for preventing falls. Recently, the studies to develop various systems have reported that can strengthen muscle strength and balance function through direct training for the prevention of falls in the elderly. There are also studies that induce fall prevention through gait training using one-belt type treadmill. Recently, a study has reported that provides fall preparatory training by providing an optical illusion effect of falling while walking using a treadmill by applying virtual reality technology [16, 17]. In addition, a study of anticipation of the fall prevention effect through repeated training using a system that provides slip training has reported.
Previous studies show that most of them are rehabilitation systems for training the simple walking process, slip function or system for preventing the fractures that occur during the fall. In order to prevent the fall of the elderly person, it is necessary to apply a training system to strengthen the muscles and joints for repetition training according to various gait pattern using split belt treadmill.
In this study, we aimed to develop a fall prevention training system for the elderly by using a split treadmill with left and right belts. We developed a powertrain system using an electromagnetic clutch, and developed a controller and a control algorithm to control it. For evaluating the muscle strengthening effect on the gait prevention training function, we estimated the muscular activities of lower limbs between normal walking and fall training walking.
Materials and method
System configuration
Configuration of treadmill
The mechanism section is composed of a frame and a power train section for transmitting and driving motor power to the belt. The control unit includes a controller for controlling the rotation speed of the motor and displaying data such as a speed, a movement distance, and a movement time, a motor driver for driving the motor by a pulse width modulation (PWM) control signal, And an electromagnetic clutch driver for turning off the clutch. Figure 1 shows the fall prevention training system.
Prototype of the fall prevention training system.
Configuration diagram of the fall prevention training system ((A) Motor, (B) Clutch, (C) Motor pulley, (D) R-belt, (E) Driving pulley, (F) Axis ADJ, (G) Driving pulley, (H) Belt, (I) Free pulley, (J) Belt guide).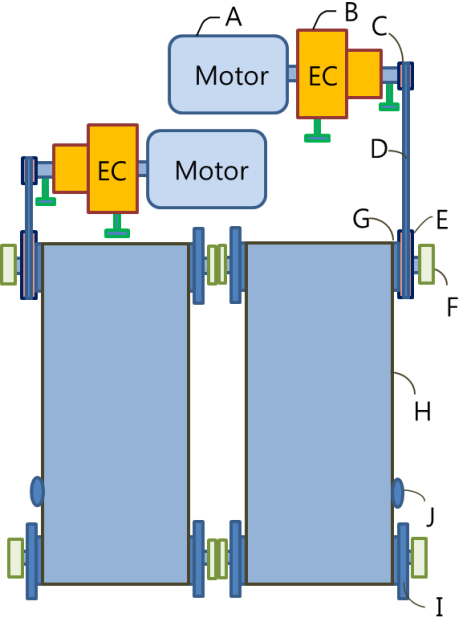
Figure 2 is the main configuration diagram of this system. The power of the left and right power train units separated from each other is transmitted from the motor (A), the electromagnetic clutch (B), the power transmission belt (D), the driving pulley (E), and the belt (H) in this order. This system is left and right symmetrical structure. In order to prevent the belt (H) from moving in the left and right directions from the driving pulley and the driven pulley and peeling off, both ends of the driving shaft and the driven shaft moved and fixed in the forward and backward directions. Since the belt (H) could separate into left and right, the rear of the left and right belts (H) can come off in the inner and outer directions when walking. To prevent this, place the belt guide (J) on the outer side behind the belt.
Fall prevention training system specs
The control of the treadmill includes an input unit for inputting the conditions for speed setting, on/off operation command, mode selection, and clutch interruption, a driver for controlling motor speed and clutch on/off, and the number of motor revolutions and the current consumed by the motor. It consists of a measuring unit that detects. The microprocessor (MCU) applied to the system is the PIC17F877 of Microchips, which has 8-bit processing speed, 10-bit AD conversion, and 33 input and output ports.
We used a DC motor of Yasakisa (Japan) with 180 V maximum 4 horsepower for the treadmill motor. A flywheel for reducing pulsation during rotation and a pulley for drawing power were located on the shaft on one side of the motor. A fan for suppressing heat rise of the motor, a slit for detecting the rotation of the motor, and an interrupt for detecting the number of revolutions of the slit is disposed.
Control diagram of the fall prevention training system.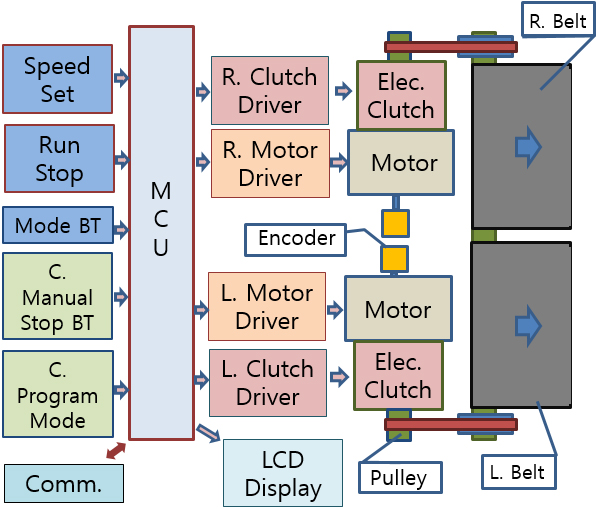
The electronic clutch performs a function of rapidly stopping or driving the rotating treadmill belt according to the presence or absence of current induced in the internal coil. The driving voltage of the coil built into the holder is DC24V (32W), and the maximum transmission torque of the clutch is 2.5 kg-f
System control of the fall prevention training system
The control unit (MCU) may set speed control, start, stop, mode selection, etc., and may operate the clutch manually or automatically according to the clutch operation mode. Belt speed control can PWM drive the motor driver according to the up and down button data. It is possible to increase or decrease the DUTY (The duty means the current cycle-on period compared to the entire cycle) value by measuring the number of motor revolutions to maintain the rotation speed according to the load change. To protect the motor and circuit of this system, the function to cut off the main relay in case of overload by measuring the current flowing through the motor. The motor driver controlled the motor rotation speed, and the voltage converted by the rectifier was DUTY controlled through the IGBT (insulated gate bipolar mode transistor). The clutch driver cuts off the electronic clutch to stop the belt abruptly while walking. For this, an IGBT placed to turn on/off DC24V induced in the electronic clutch coil.
Motor and clutch driver
The motor driver, which drives and controls the motor, applies IGBT and freewheeling diodes to drive high voltage by the low voltage PWM signal generated from the controller. In order to eliminate the noise caused by the high voltage, the PWM signal from the microprocessor driven by a high-speed photo coupler. The left and right clutch drivers were developed to turn the power applied to the clutch on/off by operating the gate of the small IGBT according to the on and off signals of the controller.
Assembly diagram of the electrical clutch.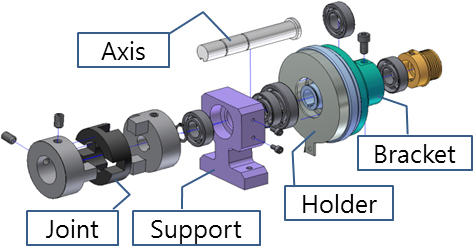
Split-type power train unit.
Motor drive power test by speed
The torque tester is equipped with a friction brake on the outermost end of the flywheel in the form of a motor, a coupling, an electromagnetic clutch, a coupling, a torque sensor, a coupling, and a flywheel as Fig. 6. A digital indicator also placed to indicate the torque of the torque sensor. This torque tester is a structure that reads the difference of the torque applied to both ends of the torque sensor by applying and decelerating the braking force of the friction brake by the manual lever operation (which means increasing or decreasing the braking force). The maximum measuring capacity of the rotary torque sensor (Senstech, South Korea) is 50 kgf-m, and the indicator for converting the torque of the torque sensor in kg units is CI-5010A (CAS Co.) product. The simple load torque of the motor for driving the belt when the weight of the walking subject is limited to 100 kg is as follows.
Torque measurement performed according to the test procedure in Fig. 6 at 1, 2, 3, 4, and 5 km/h as shown in Table 2. When the indicator output value was maintained for more than 10 seconds, the output motor rotation speed measured, and if this value was the same as the input rotation speed, it was evaluated as a pass.
Torque according to the number of revolutions
Torque according to the number of revolutions
Operation mode diagram.
We used a torque tester as shown in Fig. 6 to check whether the electronic clutch slips during power transmission. Connect the motor and the electromagnetic clutch to the torque tester. We compared the motor shaft rotation speed and the shaft rotation speed of electronic clutch output as the motor speed was changed. By operating the brake of the test device, a load of 974 Ncm (
Evaluation of real-time muscular activity by fall-induced training protocol
In order to evaluate the muscle activity characteristics at the time of gait inhibition (age 21.4
Torque estimation equipment and operation protocol diagram.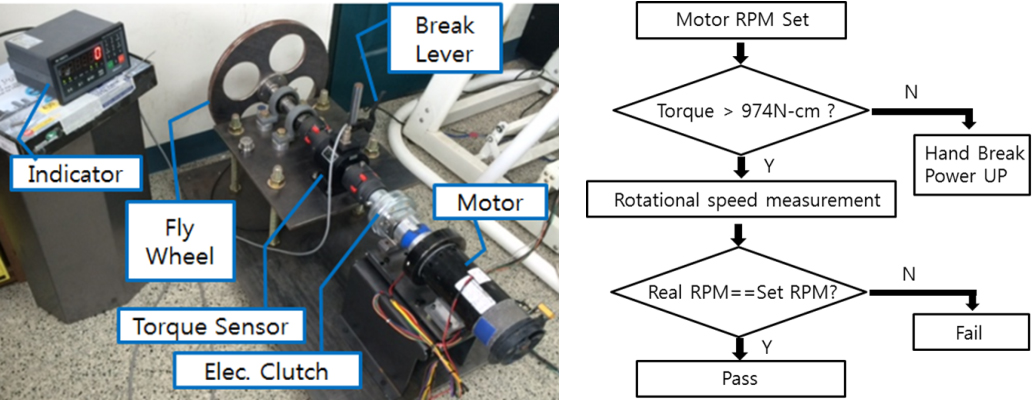
Power transmission, connection and blocking test of electromagnetic clutch
Figure 8 shows the number of revolutions of the motor under the constant torque input condition. It is the number of revolutions of the motor output when the brake of the test apparatus operated and the load of 974 Ncm, which is the converted load corresponding to the weight of 100 kg, is applied. The five-stage rotational speed in the x-axis is the motor rotational speed in consideration of the pulley reduction ratio at running belts 1, 2, 3, 4, and 5 km/h. The results of the test, the motor driver PCB module showed an output value capable of transferring a subject having a weight of 100 kg at a range of 296 rpm to 1,480 rpm in terms of the running belt speed.
Power transmission capability of electromagnetic clutch
Table 3 shows the number of revolutions of the motor and clutch per speed and the difference there between. It confirmed that the number of motor revolutions and the number of revolutions of the clutch in the running operation at running belts 1, 2, 3, 4 and 5 km/h were identical, and that the clutch did not slip. The MR-CR item is the value obtained by subtracting the clutch speed from the motor speed.
Clutch slip amount during electromagnetic clutch connection
Clutch slip amount during electromagnetic clutch connection
Muscular activity test using the TeleMyo Desktop DTS System.
T-N curve for measuring motor drive power test according to speed.
The results of muscular activity in tibialis anterior between normal and fall-induced gait.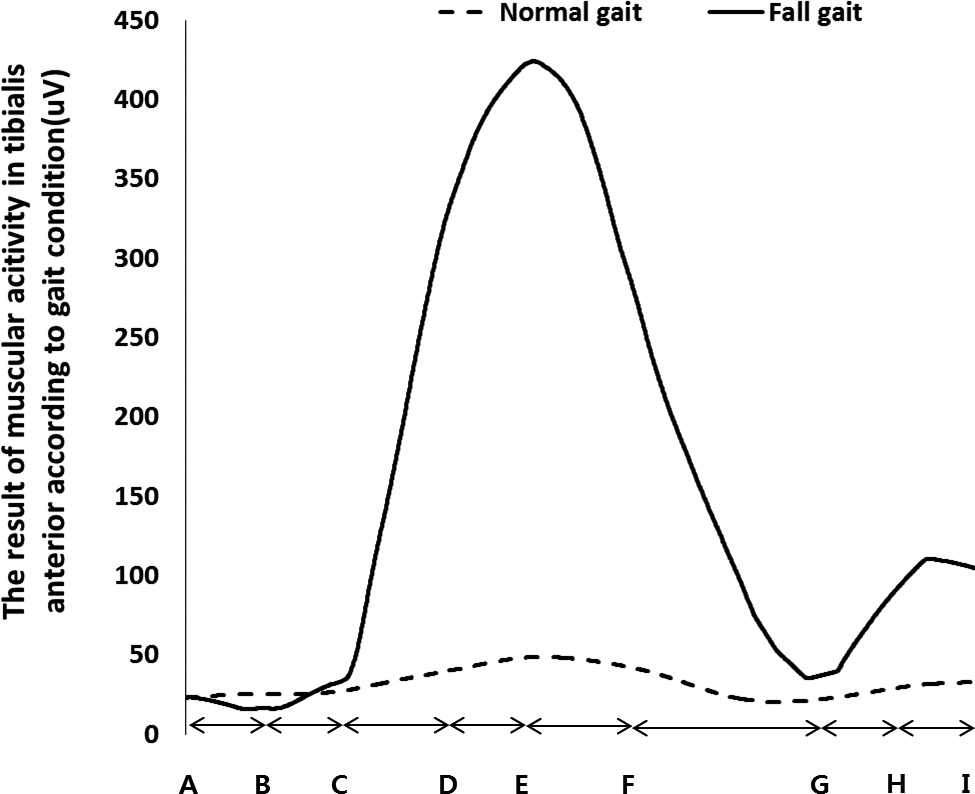
The results of muscular activity in rectus femoris between normal and fall-induced gait.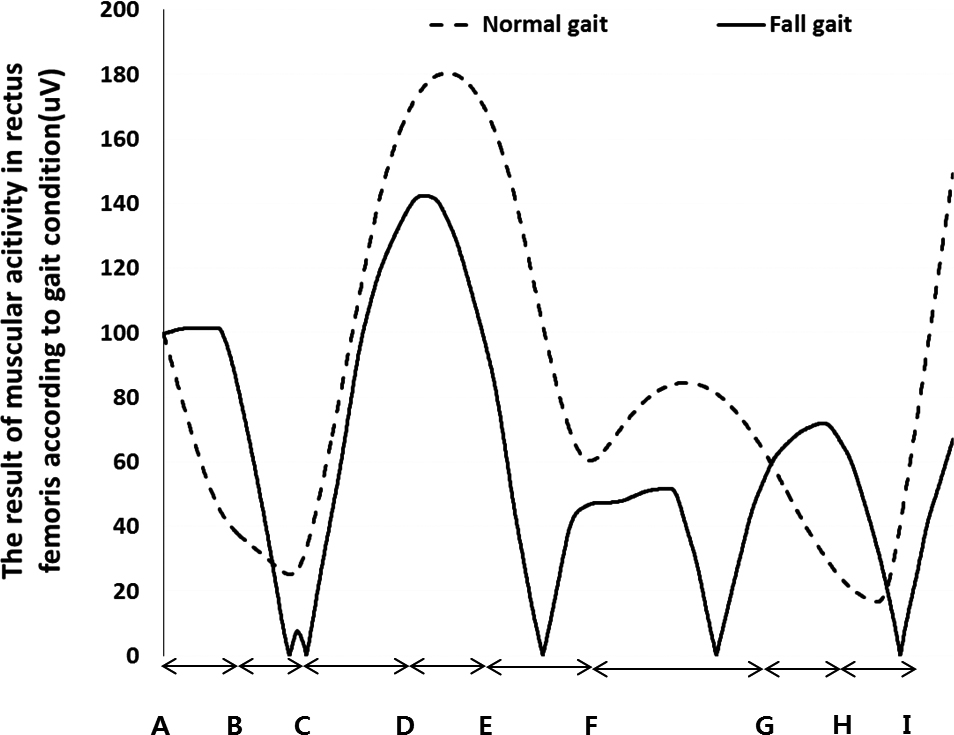
The results of muscular activity in biceps femoris between normal and fall-induced gait.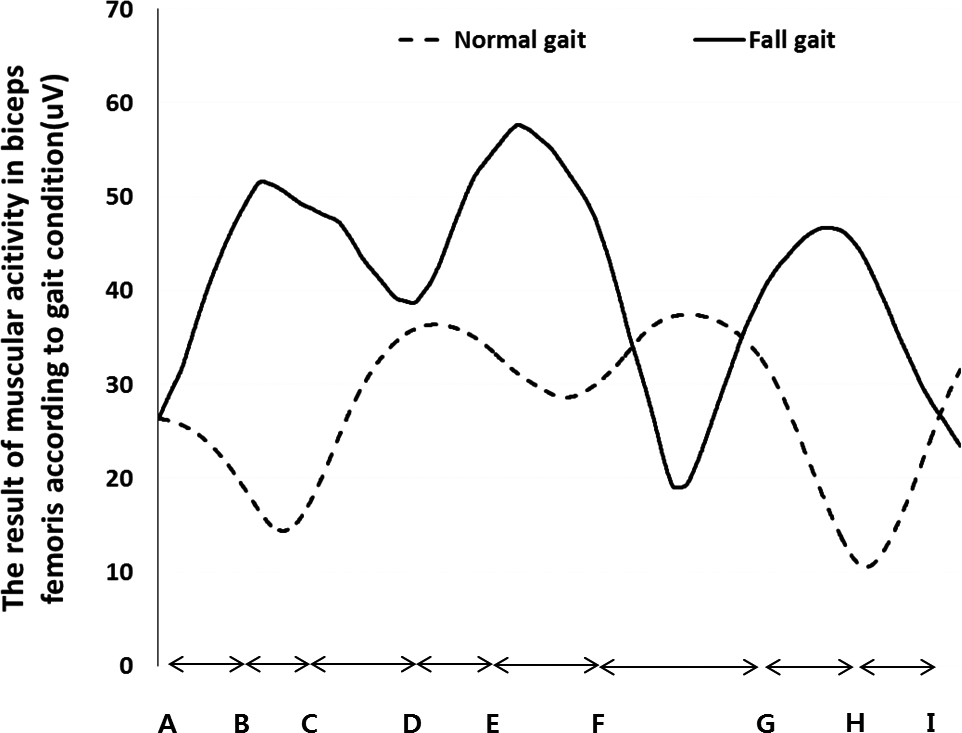
The results of muscular activity in tibialis anterior between normal and fall-induced gait.
Each muscle activity pattern was observed by analyzing the changes in the activity level of the major muscles measured on the right side normal walking condition and the falling condition on the left and right side velocity matching condition (3 km/h).
Figures 9–12 show the EMG analysis comparing the tibialis muscle, femoral rectus, biceps, and lateral gastrocnemius at the right and left foot normal (dashed) Data. A–B section was the initial stage of rapid stopping, and the forearm joint bends (Dorsiflexsion) and starts to move up, and the upper part of the tibia moves in the backward direction. In addition, the knee joint is backward and straightening process, and the lower part of the femur is moved backward while the hip joint is extended. In addition, the upper body showed up, but the forward speed stopped. The maximum muscle activity at B was 125 uV in the lateral gastrocnemius (Lat. Gastro). Muscles showing normal gait and maximal deviation showed 50 uV as rectus femoris. During the period from B to C, the body moved backward by the ground reaction, and the upper part of the tibia and the knee joint advanced. In addition, the lower part of the femur moved further backward, then changed its direction and moved forward. The hip joint bent and the left foot was toe-off, and then connected to the ground again. The maximum muscle activity at the point C was 140 uV in the lateral gastrocnemius (Lat. Gastro). In addition, the muscles showing normal gait and maximum deviation showed 60 uV in the lateral gastrocnemius (Lat. Gastro). In the C–D section, the ankle joint maintains the maximum bending state, and the shinbone is backward and then vertically upward. At this time, the knee joint raised to the top and the bending was performed, and the hip joint continued to bend. On the other hand, the left foot moves away from the ground, moves back slightly, touches the ground from the fore flings, progresses gradually, and the heel landed on the floor. In this section, the body was backward, and the maximum muscle activity at the E point was 350 uV in the tibialis anterior (TIB) when the fall occurred. Muscle showing normal walking and maximum deviation showed 170 uV as tibialis anterior (TIB). In the D to F interval, the tibial joints maintained the maximum bending state, and the shinbone moved upward and the lower side moved backward. The state of the left foot landed on the ground, and the movement of the body moving backward stopped as the knee joint was extended. The maximum muscle activity at the point F was 425 uV in the tibialis anterior (TIB). In addition, the muscles showing normal gait and maximum deviation showed 375 uV in the tibialis anterior (TIB). The point E was the inflection point, and the tibia raised to the maximum. The knee joint and femur lowered and the hip joint began to spread. In the E–F section, the forearm joints transformed from the bending process to the expanding state. The knee joint, femur and hip joints were downwardly extended. On the other hand, the tibia, knee joint of left foot is a process of starting forward with straightening. In this process, the body movements have shown by the reactionary body lifted upside down and both feet touching the ground. The maximum muscle activity at the F–G point was 250 uV in the tibia muscle (TIB) at the point of fall, and the muscle showed the maximum gait of 210 uV. In the F–G section, the left foot moved backward due to the increase in the load of the right foot, and the body was positioned perpendicular to the ground as a whole. The maximum muscle activity at G was 145 uV in the lateral gastrocnemius (Lat. Gastro), and the muscles showing the normal gait and maximum deviation showed 80 uV in the rectus femoris. The period from G to I is the data of the state of the treadmill sudden start and stop by the electromagnetic clutch connection.
Discussion
In this study, we designed and fabricated a split type treadmill with a walking restraint function that can induce similar fall during walking by applying a sudden repulsive force to the left and right legs of a pedestrian walking on a treadmill.
We confirmed that the motor controller and driver that drive and control the motor of the developed system could safely drive a subject with a weight of 100 kg on the belt according to the speed of 1, 2, 3, 4, and 5 km/h. In addition, it confirmed that power transmitted smoothly without slip.
In the results of the muscle activity test, we showed the greatest increase in the level of muscle activity of the tibialis anterior muscle of the right lower extremity due to the increase in the ground repulsion during the sudden stop of the belt in the early stage of right-folding (heel strike). The muscle activity of the rectus femoris muscle rather decreased, and the biceps femoris and lateral gastrocnemius muscle showed a large change in muscle activity, unlike during normal walking. In addition, we confirmed the phenomenon that the upper body tilted backward as the right foot bounces up from the ground repulsion force in the direction of the rear upper diagonal during a sudden stop. We think that this phenomenon caused by the ground repulsion force generated by the right foot of the left foot trying to enter the toe-off phase and the phenomenon of the upper body falling backwards. Due to the reaction force of the leaned upper body coming back forward, the right foot goes through a short swing phase when the femur and shinbone straightened and the body regains stability, we confirmed that the body moves forward again, the right foot becomes parallel to the right foot according to restoring posture balance. As we control the degree of falls through the above results, we think that training to restore balance following repeated falls could strengthen even the large muscles of the lower extremities that re rarely used during normal walking. In addition, the fear of falls in the elderly can be minimized through direct fall prevention gait training rather than a simple theoretical educational method [18], and improve walking ability, lower extremity muscle strength, and coordination function at the same time through continuous training. In addition, we judge that a training program that can relieve the elderly’s usual fear of falling is also applicable. We can expect similar results to previous studies [19, 20] that the improvement of lower extremity muscle strength during fall prevention training in this study, improvement of endurance following walking, and improvement of flexibility during fall recovery improved balance ability during compound exercise (strength, endurance, flexibility exercise).
According to the results of previous studies, various gait pattern training not only for the general elderly but also for patients with brain diseases has reported to have positive effects on activating brain blood oxygen [21] and improve cognitive and physical functions [22]. We think that various gait treatments with independent gait speed in the left and the right side and gait pattern in this study can be expected early rehabilitation treatment effects.
Conclusion
We hope that the use of the fall training system developed in this study and the bio-signal data obtained by age, speed, and gait position according to the induction of falls can be used in the future as basic data for the development of a program that can predict the degree of fall probability. We expect to be able to respond to falls in actual fall-induced conditions by enhancing the fall-related muscles through balance training that induces arbitrarily falls while walking. In addition, we expect that the detachable belt treadmill developed in this study will be of great help in the early rehabilitation treatment of rehabilitation patients or hemiplegic patients by providing left and right walking speeds independently.
Footnotes
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2020R1F1A1076549) and supported by Basic Science Research Program through the National Reasearch Foundation of Korea (NRF) funded by the Ministry of Education (NO. 2022R1I1A1A01064258).
Conflict of interest
None to report.