
Abstract
The development of surface public transportation networks is a major issue in terms of ecology, economy and society. Their quality in terms of punctuality and passengers services (regularity between buses) should be improved in order to improve their attractiveness. To do so, cities often use regulation systems at intersections that grant priority to buses. The problem is that each transportation mode has its own characteristics and a dedicated decision support system. Therefore, most of them hardly take into account both public transport vehicles such as buses and private vehicle traffic. This paper proposes a multi-agent model that supports bimodal regulation and preserves monomodal regulation. The objective is to improve global traffic, to reduce bus delays and to improve bus regularity in congested areas of the network. In our approach, traffic regulation is obtained thanks to communication, collaboration and negotiation between heterogeneous agents. We tested our strategy on a complex network of nine junctions. The results of the simulation are presented.
Keywords
Introduction
The development of surface public transportation networks is a major issue in terms of ecology, economy and society. Traffic jam costs six billions of euros each year. To be more attractive, urban surface public networks must improve their quality in terms of punctuality and vehicle frequency while at the same time they must decrease management costs. Unless the buses operate totally on exclusive or protected rights-of-way, like in the bus rapid transit approach [44], the quality of surface public transportation service is related on urban traffic.
Without expensive specific infrastructures for buses, an alternative to improve route times of urban public surface transportation (bus, tramways, shuttles, etc.) is to use regulation systems that apply strategies at intersections that grant priority to vehicles. These systems are referred to Advanced Transit Signal Priority Systems (ATSPS) [39]. They offer one of the most cost-effective approaches to enhance the effectiveness and efficiency of transit operations. The aim of these strategies is to improve the quality of services of public transport vehicles as well as private vehicles that have to cross an intersection. These two types of traffic are referred as bimodal traffic.
Traffic flow can be modeled at a macroscopic level or at a microscopic level following the data used to describe the traffic flow. Microscopic modeling takes into account individual data like the location of each vehicle in order to build a control strategy. This approach is efficient to solve specific traffic problems but is time-consuming and is limited by the availability and cost of these location data. Furthermore, this microscopic model is not well adapted to build real time control strategies for wide urban networks [32]. Macroscopic modeling builds control strategy based on aggregate traffic data like average speed or traffic density. The macroscopic approach is well adapted to regulate a large-scale network but is not adapted to take into account specific needs of vehicles. Furthermore, global representation of bus traffic does not allow more than an indirect consideration of the intervals between buses [8]. The duality between microscopic and macroscopic models is a well-known problem in classical control theory used to regulate bimodal traffic (public and private vehicles) [11,25,34].
Our objective is to build a traffic control strategy for bimodal traffic that takes advantages of microscopic and macroscopic regulation approaches and combines them. Our proposition is a regulation strategy taking into account microscopic data for public vehicle traffic and aggregated data for private vehicle traffic. The main issue is to find the best compromise between individual needs (microscopic regulation objective) and social needs (macroscopic regulation objective).
We propose a multi-agent modeling to process our traffic control strategy. The multi-agent approach is often used to support the design of complex systems where several entities interact on a distributed network and where several decision scales have to be taken into account. This approach is also well adapted to study the effects of individual behavior of an agent on the collective behavior and vice versa. We note that multi-agent systems are increasingly present in the field of traffic regulation and several states of the art have been proposed [5,15,22,23,27,30]. Most of the proposals are based on the introduction of multi-agent concepts and processes to improve intersection management i.e. multi-agent learning [4], reactive agents [12], cooperation [18,21,36,37,41], multi-agent simulation [29] or distributed constraint satisfaction problem [33]. For example, in [41], the regulation system is related to traffic assignment using negotiation between vehicles and intersections. However, the above modeling approaches are either partial or too simple to take into account the complexity of bimodal traffic regulation strategies. In order to integrate several control strategies and two levels of control, i.e. microscopic and macroscopic control, we propose a multi-agent modeling of this complex regulation system. Our proposition adapts individual behaviors of buses given by bus agents to collective behavior of vehicles given by aggregate data and vice-versa.
The paper is organized as follows. The second section presents the state of the art of advanced transit signal priority systems. The third section gives a global overview of our proposal from the notions of the domain to multi-agent modeling. The fourth section details how each regulation process is executed i.e. mono and bimodal processes. The fifth section provides the detailed results of the simulation tests carried out on the Jade platform. Finally, we conclude in the sixth section.
State of the art
The first Urban Traffic Control (UTC) systems were used to coordinate traffic light on the thoroughfares of the route network. A good survey of the main characteristics of these systems can be found in [19]. Since the 70th, UTC systems were adapted to include a Transit Signal Priority (TSP) module [24], becoming what is called Advanced Transit Signal Priority Systems (ATSPS).
The use of ATSPS is efficient when traffic is light or when it needs to improve a single congested bus route or buses on cross streets resulting in shorter travel times for buses [31]. However, they present several pitfalls: longer travel time for crossing traffic and irregular intervals for prioritizing buses at traffic lights in congested conditions. This implies irregular arrival at bus stops, often in bunches. To cope with this problem, operators hold buses at control points to stay on schedule [17]. Gained time when crossing lights will be followed by a holding time at the control point. This action leads to time loss for private cars as well as buses. Reducing the time of bus journey, although very important, is not enough for operating a route. It is just one of the primary factor considered by public transport operators. To take into account public transport vehicle specificity, another type of regulation system was developed: TRSS (Transportation Regulation Support Systems). TRS systems follow a micro-regulation based approach, i.e. an approach that models the behavior of each bus [1–3,6,13]. Unfortunately, TRS systems have the same weaknesses as ATSPS, namely they remain focused on their own regulation issues. The private vehicle traffic flow that follows a macroscopic model, is hardly taken into account by TRSS. Consequently, we will not focus on this type of system.
Our proposition is based on ATSPS strategies in which we have integrated a bimodal process. In [39] a comparison of advanced transit signal priority concepts is presented. The authors identified four strategies:
Passive priority: this regulation strategy, called macroscopic regulation, takes into account theoretical bus timetables [42,43]. This strategy is static and not well adapted to the dynamicity of the traffic. For instance, the priority is given to a bus even if it is already beyond the intersection. Active priority: the location of a bus at an intersection is the event that gives priority to its lane [7,10,20,40]. This priority is automatic and does not take into account the bus timetable. Therefore, the priority can be given to a bus that is already ahead of schedule, the consequence being useless delays to non-priority traffic. Conditional Active Priority: The priority is given to a bus according to its deviation from the schedule [21,28]. This solution limits the number of buses running ahead of schedule and decreases the useless delays of non-priority traffic. Nevertheless, reducing time of bus journey, although very important for operating a route, is not the only factor taken into account by public transport operators whose obligation is to provide a good service to passengers and to respect bus schedules. Keeping regular intervals between buses strategy is another important issue for transit agencies. Adaptive Priority: in this strategy, the objectives to adjust the traffic signal plan are both to keep regular intervals between buses and to reduce the total bus delay in a lane [14,16,32]. We chose this promising strategy as the control strategy of our system.
To cope with the drawbacks of previous control systems, we have developed a new model for traffic light management giving priority to buses. In [9], we gave a previous version of this system with early results. The present paper improves this first work giving a fully integrated system called BDSS (Bimodal Decision Support System).
Bimodal Decision Support System: A global overview
This section gives a global overview of our proposal. We begin with notions of the domain followed by the description of the functional architecture of our bimodal regulation model: we integrate a new decision component called BDSS that links two monomodal regulation decision systems called AVM and UTC (see next section). Finally we describe our multi-agent modeling of these two systems.
Notions of the domain
In our model, the urban network is represented by an oriented graph G = (I, A). The nodes {I} represent the intersections and the arcs {A} represent the lanes that connect the intersections. Two intersections can be connected by one or several arcs depending on the number of lanes on the thoroughfare.
An intersection is specified by the set E of arcs that enter it and the set S of arcs that leave it. Entering arcs are used by corresponding traffic streams (veh/h). Two compatible streams can safely cross the intersection simultaneously else they are called antagonistic. A signal cycle is a repetition of the basic series of signal combinations at a junction; its duration is called time cycle. A stage (or phase) is a part of the signal cycle, during which one set of streams has right of way (r.o.w.) (Fig. 1).
An arc
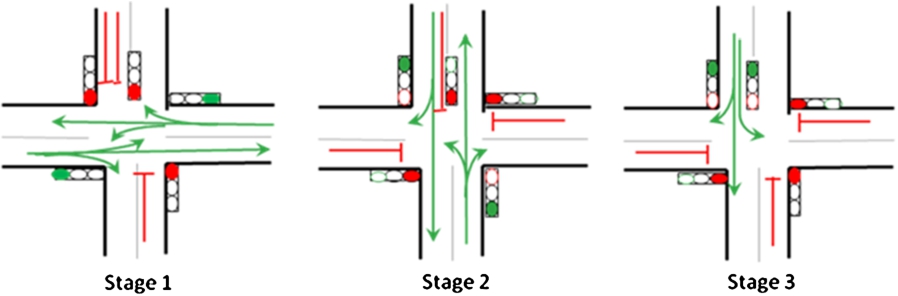
Example of an intersection with 3 stages.
Buses on the network are grouped into bus routes. Each bus route contains all bus vehicles that have the same origin, the same destination and that serve a number of predefined commercial bus stops at regular time intervals. The time spent by a bus at a commercial stop is equal to the pre-set time for passengers to board, plus additional time to regulate the interval, if required.
A constant lost time (or intergreen) of a few seconds is necessary between stages to avoid interference between antagonistic streams of consecutive stages. There are four factors used for acting on traffic conditions: the split factor, the time cycle factor, the offset factor and the stage specification factor.
The split factor is the relative green duration of each stage (as a portion of the time cycle) that should be optimized according to the demand of the involved streams and, in our context, as regard to bus priorities.
The cycle factor: a longer time cycle increases the intersection capacity because the proportion of the constant lost time becomes accordingly smaller. On the other hand, a longer time cycle may increase vehicle delays in under-saturated intersections due to a longer waiting time during the red phase.
The offset factor is the stage difference between cycles for successive intersections that may give rise to a “green wave” along an arterial. The specification of the offset strategy should ideally take into account possible vehicle queue formation.
The stage specification factor is the specification of the optimal number and constitution of stages. For complex intersections involving a large number of streams, the stage specification is a nontrivial task that can have a major impact on intersection capacity and efficiency. To avoid awarding an oversized green duration, the set of streams having the same volume in term of vehicle number, and having no conflict situations as regards to safety, are gathered in one stage.
The new bimodal strategy that we propose is based on the first two factors, the last two ones are defined by the regulator prior to the control strategy.
Even if private vehicles and buses use the same lanes, they have been and often still are regulated by independent systems. Private vehicles are regulated through control strategies executed by the Urban Traffic Control (UTC) system and buses are regulated by means of the Automatic Vehicle Monitoring (AVM) system that is included in a more general systems called TRSS (Transportation Regulation Support System) [1–3].
Recent interest in intermodal management as a tool to slow down the progression of private vehicle use encourages the development of multimodal systems. This leads to a research field on multimodal platforms offering services and tools for traffic operators as well as improvement of public transport services by extending Urban Transit Control (UTC) systems with Transit Signal Priority (TSP) (or bus priority). Among the known multimodal platforms, we can cite
As shown in Fig. 2, the functional architecture of our Bimodal Decision Support System (BDSS) is based on these two systems. The AVM and UTC systems keep their initial functionality: following a monomodal process, they collect the on-line data and apply the regulation procedures related to their transportation mode. For instance, the AVM system compares the actual positions of buses (captured by sensors) with their theoretical positions given by pre-registered timetables in order to detect disturbances and to apply regulation procedures. In this way, the vehicles running ahead of timetable or running late are regulated.
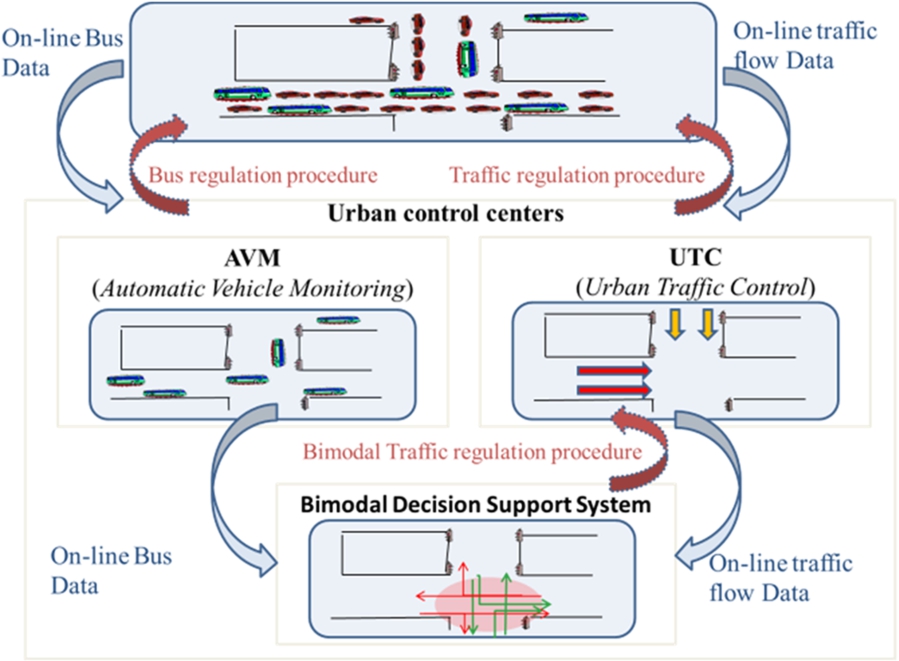
Bimodal Decision Support System Architecture.
In a bimodal process, data are used by the BDSS to modify traffic regulation procedures given by the UTC without modifying the AVM behavior. The objective of BDSS is to compute new traffic lights plans taken into account requests of buses.
In order to integrate these different systems, we propose a multi-agent modeling of all the regulation components. We propose to integrate agent-based models of AVM, UTC and BDSS in a same model following the functional architecture presented in Section 3.2. More precisely, that means that the monomodal process is executed by agents as well as the bimodal process (Fig. 3). This modeling leads to an integrated and homogeneous proposal. The advantage of this approach is the possible comparison of different regulation scenario by the activation or deactivation of behaviors without a biais introduction of another regulation system.
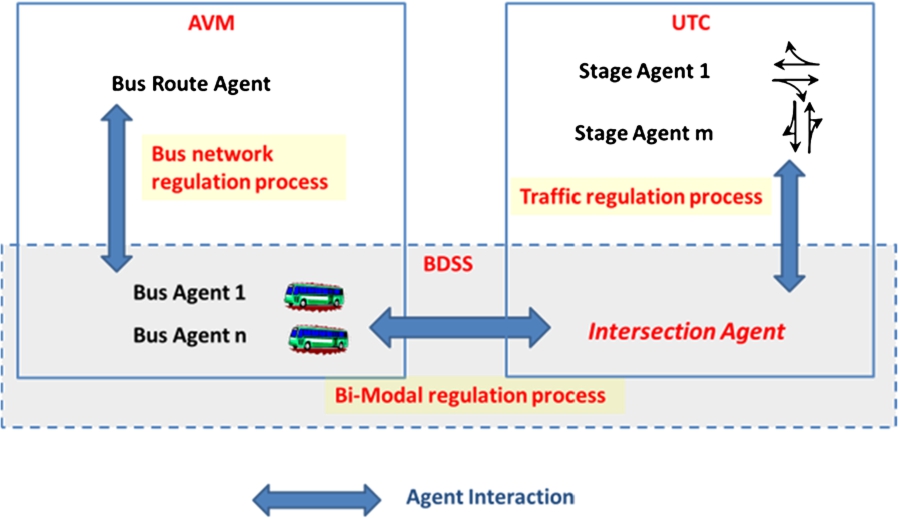
Multi-agent modeling of a bi-modal regulation process.
In the following, we give a general description of our agent architecture.
Automatic Vehicle Monitoring (AVM) system. Two types of agents ensure the monomodal regulation of bus network:
In our microscopic model, BAs represent buses that circulate from one arc to another on their route according to their theoretical schedule. They halt at commercial stops, halt at red lights and execute the regulation procedure. The objective of each Bus Agent is to minimize time spent at traffic lights in order to minimize journey time. BAs can only provide a local view of their environment. More precisely, they can only know if they are ahead or late given a theoretical schedule and thus decide to apply what is called logic of punctuality (buses can decide to accelerate or to slow down). This local optimization carried out by Bus Agents can have a negative impact on the route (i.e. formation of bus queues or gap of buses) which has a negative impact on their regularity. To tackle this problem, we propose an agent, called Bus Route Agent, which has a global view of the BAs and which can control and modify their behavior in order to guarantee an efficient and regular service on a route. There are as many BRAs as routes. The interaction between the agents related to buses on the network ensures a monomodal micro-regulation process of the bus network.
Urban Traffic Control (UTC) system. Two types of agent ensure the monomodal regulation of the traffic network:
Traffic regulation process is based on a macroscopic modeling of vehicles. Each intersection is represented by one IA and several SA. The number of SAs is given a priori by experts according to the intersection topology. The traffic signal plan is elaborated thanks to the collaboration between the IA and the corresponding SAs. Each SA determines the optimal green light split to clear the waiting vehicles on the arcs related to the stage. The aim of the IA is to manage the conflicts between SAs. Thus, whatever the complexity of the intersection is (and its physical configuration), it is managed by a set of Stage Agents interacting with the Intersection Agent in order to develop a plan of actions for the traffic light.
Bimodal Decision Support System (BDSS).
By definition, there is a bimodal regulation process when the choice of the regulation procedure takes into account the constraints of two networks. In our proposal, the bimodal regulation process is initiated by a Bus Agent which wants priority and is processed by the
The Intersection Agent adapts the plan of traffic lights according to two criteria: 1) the need of the corresponding Stage Agents, which is based on a macroscopic modeling of the global traffic and 2) the priority requests of Bus Agents which are related to the microscopic modeling of buses. The Intersection Agent is therefore the key agent of our architecture.
In this section, we detail the behavior of agents that are related to the monomodal and/or bimodal regulation process. Our proposition being focused on the bimodal regulation process, the monomodal regulation processes have been simplified. For instance, the bus network regulation process is limited to one regulation procedures: a bus waits a computed holding time at a commercial stop if it is ahead in order to eliminate bus bunching. However, since our regulation model is independent of the bimodal regulation process, this regulation model is general, i.e. other regulation procedure could be added as in [3] or several traffic regulation strategies can be processed. The novelty of our proposition is that it supports bimodal regulation and preserves monomodal regulation.
Bus network regulation process
The role of the Bus Route Agent is to supervise Bus Agents so as to prevent a local level regulation and the creation of bus queues (Fig. 4).

Supervision of bus agents by the bus route agent.
In order to execute its behavior, the BRA keeps the following data: 1) the set of arcs traveled by the bus on its route; 2) The set of stops on the route, for each stop, its position, and the distance separating it from the next stop; 3) The set of buses on the route; 4) The frequency of buses introduced onto the route.
The interaction between a Bus Route Agent and a Bus Agent begins when approaching a stop
At the end of each cycle, a new traffic signal plan has to be computed. It determines the duration of the green light and the ranking of each stage. The objective is to maximize the capacity of the intersection.
The plan is calculated through the collaboration between the Intersection Agent (IA) and the Stage Agents (SAs). Figure 5 gives a global overview of the interaction protocol. The IA plays the role of a manager in supervising the SAs that act as participants.
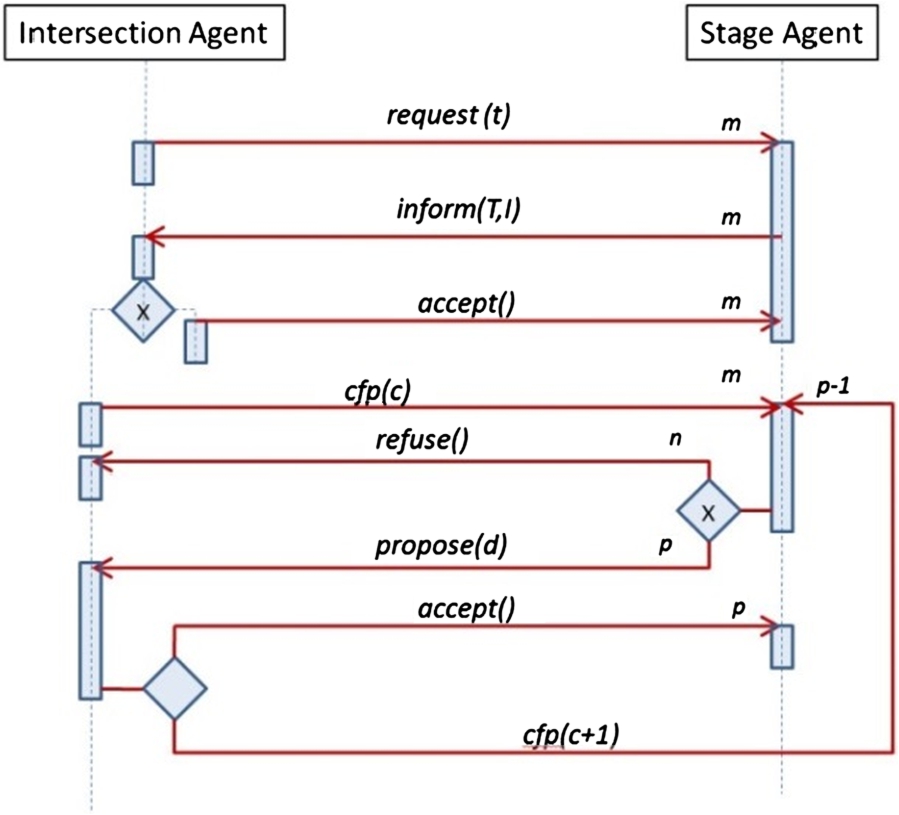
AUML traffic signal plan calculation protocol.
The IA uses the following static data:
The set of possible values of the traffic light cycle, 120 seconds is the maximum value allowed to the traffic light signal cycle in our system;
The lost time i.e. the period of orange or all red. The all red light is a period during which all the arcs from the same intersection have a red light in order to clear the center of the intersection and thus prevent accidents. This fixed period, in conformity with the architecture of the intersection, does not depend on the length of the cycle. It is fixed here to a two second period after each stage;
The set of stages of the intersection.
The first part of the protocol is the following: IA sends a message request to the SAs asking them for the time necessary to clear all the vehicles from their stages, beginning at time t for a given traffic light signal cycle duration. Then, each SA computes the desired duration of green light
The optimal duration of green light (
When computing the cycle, the IA ranks the stages as in [22], such that the most congested arcs of the intersection and those which have the greater number of buses are served first. To model this decision, we introduce the urgency index of a stage computed by each SA. This urgency index takes into account the number of buses and the saturation level of the lane with the number of private vehicles through
The higher the index of urgency of a stage is, the greater its urgency is. We can notice that if there are several buses on arc i (if
The SA sends the result of its computation to the IA and waits for its decision. If the sum of the optimal duration of green light received by the IA is less than the cycle duration (
IA initializes cost c:
IA sends a call_fo_propose (cfp) message with a proposition and cost c to all the SAs associated with the intersection.
The SAs reply with a propose or refuse message. A SA refuses if reducing its duration leads to saturation on more than c arcs or if it has buses on it or if its duration is minimum (each stage has a minimum value imposed in order to let pedestrians cross the road). If it doesn’t refuse, it proposes a new duration
Once all the responses have been received by the IA, the durations are added,
If this sum (d) is less than the cycle duration (
In order to minimize the time spent at traffic lights, Bus Agents request priority when they are late. In our proposal, this regulation procedure is a bimodal regulation procedure that involves AVM and UTC systems. Remember that all buses have to provide a regular service and avoid bus queues. In other words, the frequency of buses passing commercial stops must remain constant. Therefore, at an intersection when there are several buses from different routes requesting priority, the priority has to be given to the most disrupted route using regularity criteria on a same route. To do so, AVM ranks bus requests. Moreover, the priority should not have negative consequences on the urban traffic. Consequently, the UTC has to compute a new traffic signal plan taking into account the bus request.
General interaction protocol.
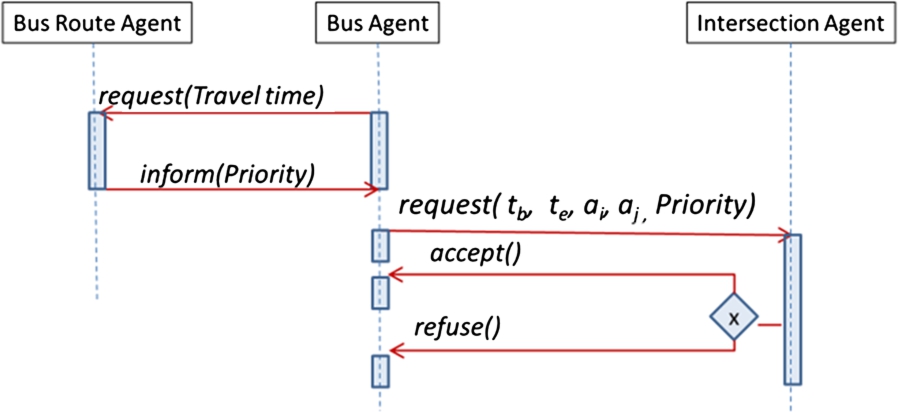
Therefore the bimodal regulation process is the result of the interaction between a BA (the initiator), its BRA (the AVM part) and the IA (the UTC part). Figure 6 gives a summary of the general interaction protocol between a Bus Route Agent, a Bus Agent and an Intersection Agent.
In the next sections, we first detail how the BAs compute their requests then we explain how the IA takes the requests into account and adapts the traffic signal plan.
A late BA approaching an intersection sends a request to its BRA with the value of its delay. The BRA informs the BA of its level of priority that is a function of the predecessor bus delay: the greater the delay is, the higher the priority is.
To request priority, the BA has to compute a time-window when its request has to be satisfied. On entering arc i at
Let R be the requested interval, R contains the interval [
The computation of
The value of
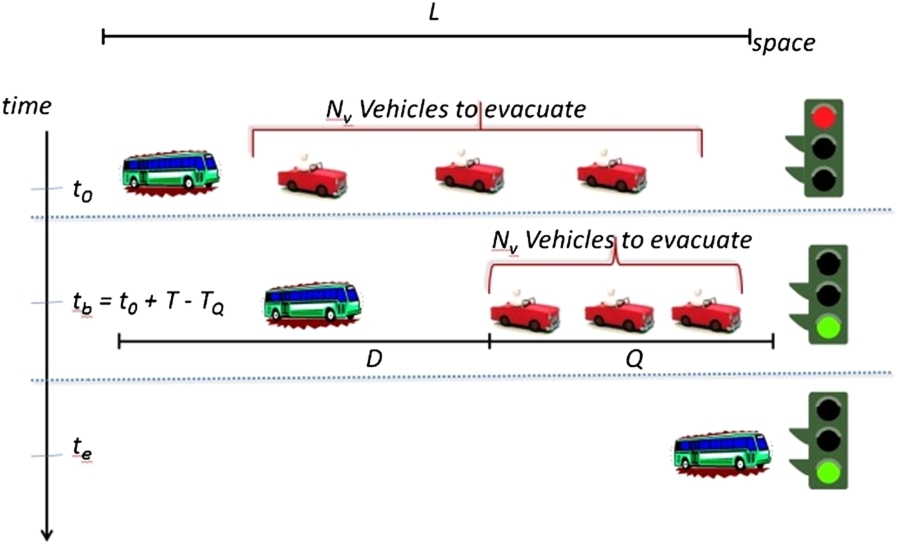
Reservation of green light duration by a bus.
Given these values, a reservation request is specified as follows:
To compute its answer, the Intersection Agent (IA) uses two types of dynamic data. The first is related to the traffic signal plan: it specifies the order of the stages as well as the duration of each stage and is dynamically computed as explain in Section 4.2. The second is the list of received reservation requests from Bus Agents.
When the IA receives a request from a BA, it finds the SA associated thanks to the recorded
Since several buses can request priority at the same time, the Intersection Agent has to solve conflicts. The conflict resolution is explained using the following example (Fig. 8) in which the intersection has a plan with four stages (
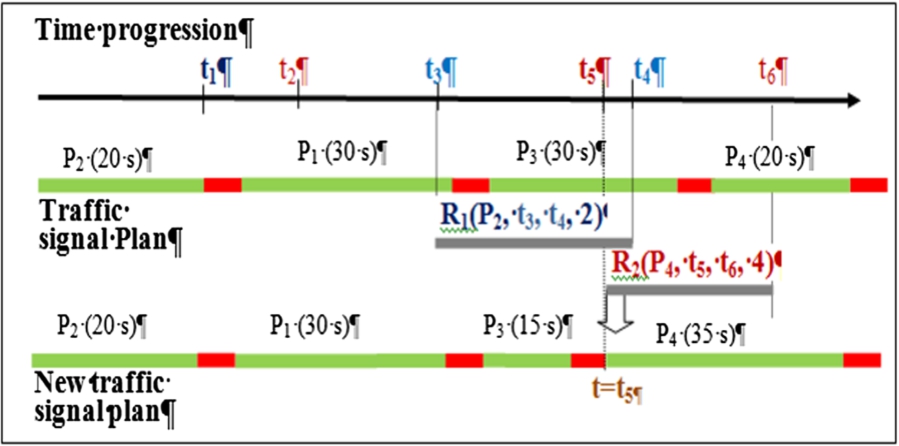
Example of a traffic signal plan and its modification.
In this example, in the initial traffic signal plan, the order of stages is
To test our proposal, we have developed a Multi-Agent System prototype on the JADE1
platform (Java Agent Development Framework). JADE offers Java middleware based on a peer-to-peer architecture with the overall aim to provide a runtime support for agents.The prototype network (Fig. 9) consists of 9 intersections and 50 arcs. Each arc is 300 meter long. Most of the network sections have one lane except for sections I1–I2 and I2–I3 which have 2 lanes in the same direction. Each lane is considered as an independent arc. The saturation flow, which is the maximum exit output of the arcs, is considered the same for each arc and equal to 0.5 vehicle/second. The network has 12 entries.

The simulated network.
At each entry, the simulation platform generates vehicles with different frequency going from 1 vehicle generated every 5 seconds (720 veh/h) to 1 vehicle generated every 10 seconds (360 veh/h) which is a standard for an urban network. Most intersections are working on two stages, except for intersections I2 and I3 which have three stages.
We consider two bus routes on the network: BR1 and BR2. A Bus route is defined by:
The identification of the arcs. In our example, Bus Route BR1 consists of arcs {23, 10, 4, 11, 35, 31} (see Fig. 10).
The identification of commercial bus stops (i.e. A11 stop, A12 stop, etc.), the arc on which they are situated, their position on the arc (i.e. A11 stop is situated at 100 meter from the beginning of arc 23, A12 is situated at 150 meters from the beginning of arc 10, etc.) and their control waiting time, which is the strategic waiting time imposed to buses by the Bus Route Agent at the corresponding commercial stop (in our example, the successor bus vehicle must wait for 30 seconds at bus stop A12 Fig. 10).
The frequency of generated buses. It is equal to 50 seconds on Bus Route 1 (Fig. 10) and to 40 seconds on Bus Route 2.
In the next section we present a comparison between our bimodal strategy (called MAS Strategy) and two other strategies: 1) Fixed Time Strategy: the duration of all stages is fixed; 2) Without Priority Strategy: the duration of stages is dynamically computed (Section 4.2) but buses do not request priority.

Definition of Bus Route 1.
Figures 11 gives simulation results of the three strategies. Figure 11(a) shows the recorded delays for buses with the three control strategies and Fig. 11(b) shows the same kinds of curves for private vehicles.
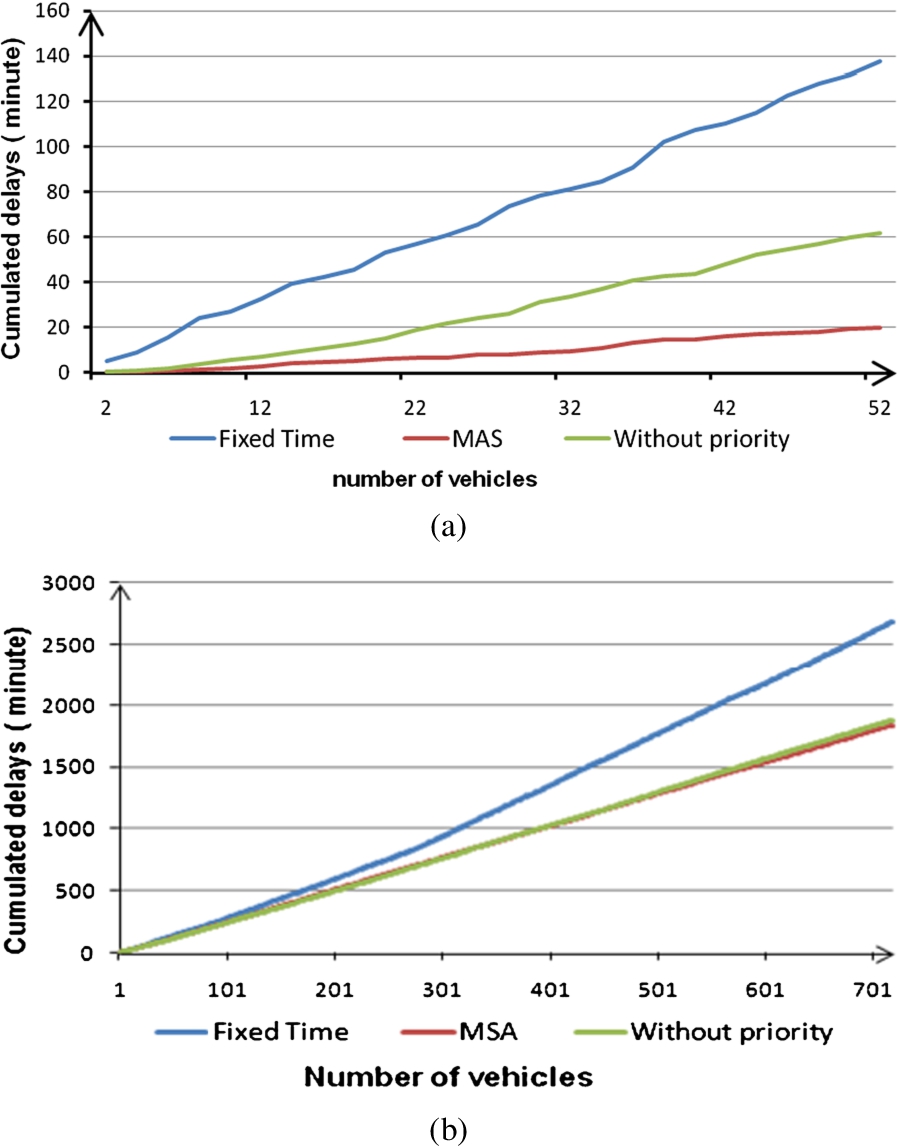
(a) Buses cumulated delays; (b) Private vehicles cumulated delays.
These delays correspond to the sum of time lost by buses (resp. vehicles) during stops at traffic lights. Figure 11(a) shows that, on the simulation period, the MAS strategy improves bus travel time (cumulated bus delays) by 85% compared to the Fixed Time Strategy whereas the Without Priority Strategy improves buses traffic by only 76%. Figure 11(b) shows interesting results: Without Priority Strategy and MAS Strategy give same cumulated delays for private vehicles. They both improve vehicles delays by 30%. Thanks to the MAS Strategy, the average delay (lost time) of buses is equal to 23 seconds, when it is equal to 2.6 minutes with the Fixed Time Strategy. Considering these two results, we can conclude that MAS Strategy is the best one since it improves significantly bus traffic as well as private vehicles traffic, and, using bus priority, helps traffic regulation.
In this section, we study the MAS Strategy at a microscopic level: the intersection level. We choose I2 and I3 intersections (see Fig. 9). Each of them has 3 stages (see Fig. 14). As for I2, bus routes use arcs which need different stages: Bus Route 2 needs the stage S2_1 however Bus Route 1 needs either S2_2 or S2_3 to cross the intersection I2. This means that these two bus lines are conflicting if two buses at the same time ask for priority. Intersection I2 will have to solve a conflicting situation as explained in Section 6.
As for I3, both bus routes can cross the intersection either when S3_1 or S3_2 have the right of way. The two buses are not conflicting. So we can expect better time to cross the intersection.
Average travel time (TT) between the two bus stops around the junctions I2 and I3 for BR1 and BR2. TT is expressed in seconds
Average travel time (TT) between the two bus stops around the junctions I2 and I3 for BR1 and BR2. TT is expressed in seconds
Table 1 gives the average travel time for vehicles on BR1, first between bus stops A12 and A13, showing the impacts of the three strategies on intersection I2 traffic, and then between stops A13 and A14, showing the situation on intersection I3. For vehicles on BR2, travel time is measured between a23 and a24 and then between a22 and a23. One can notice that the MAS strategy improves bus travel time even for intersection I3, whereas as explained before, buses can cross I3 on two stages among the three ones available and hence can cross quickly. We can also notice that MAS Strategy succeeds to suppress the delays on this intersection, as if there is no congestion, the minimum time needed to travel the 300 meters separating the two bus stops a22 and a23 is 27 seconds. On intersection I2, where buses can run only on one stage, benefits of MAS Strategy on travel time are more important. They are equal to 27% for BR1 and 28% for BR2.
Figure 12 (respectively Fig. 13) gives bus delays for BR1 (respectively BR2) buses at junction I2 and I3. The X axis represents the bus numbers generated by the simulation. We can see on these figures that another advantage of MAS strategy is that it preserves regularity of travel time (delays stay nearly constant) across these intersections.
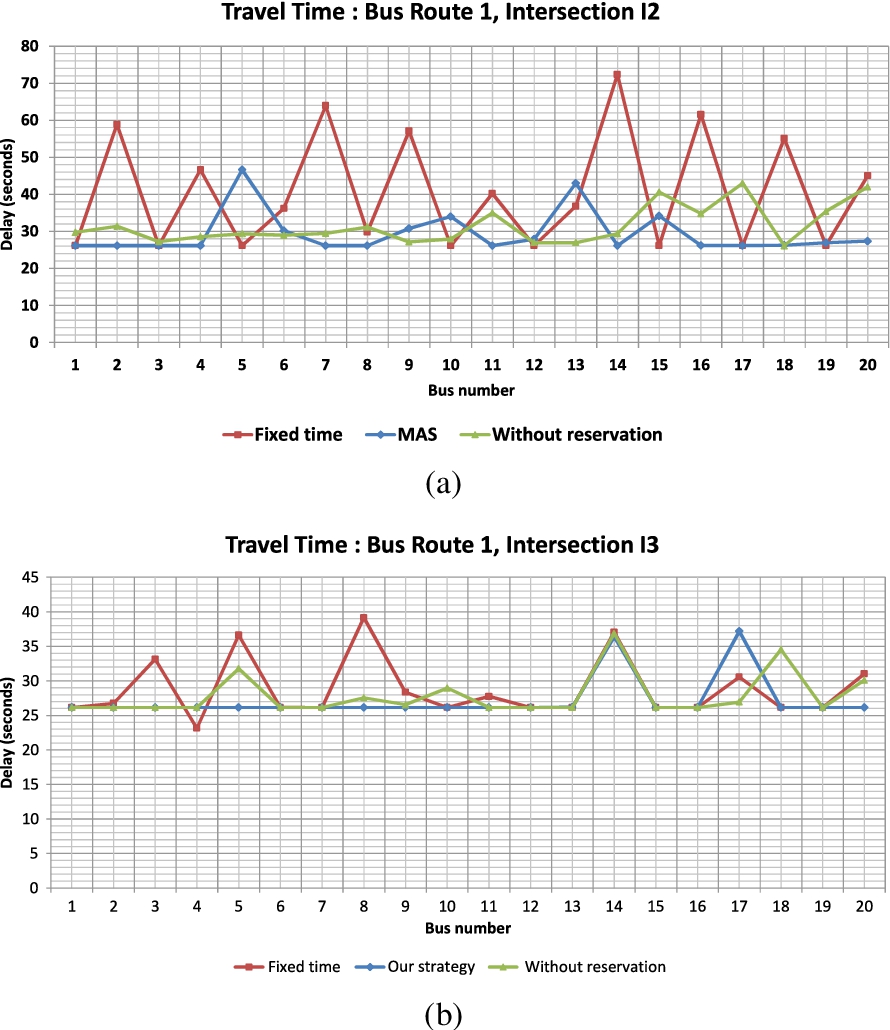
(a) Buses travel time on BR1 on Intersection 2; (b) Buses travel time on BR1 on Intersection 3.
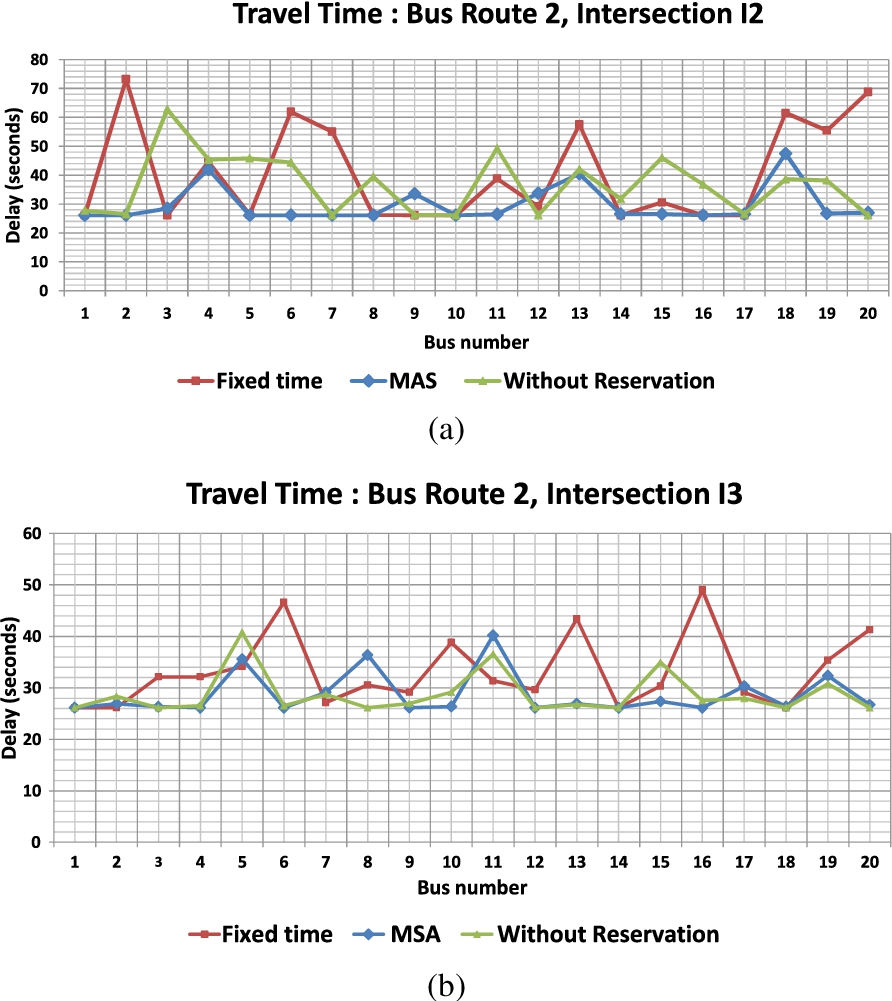
(a) Buses travel time on BR2 on Intersection 2; (b) Buses travel time on BR2 on Intersection 3.
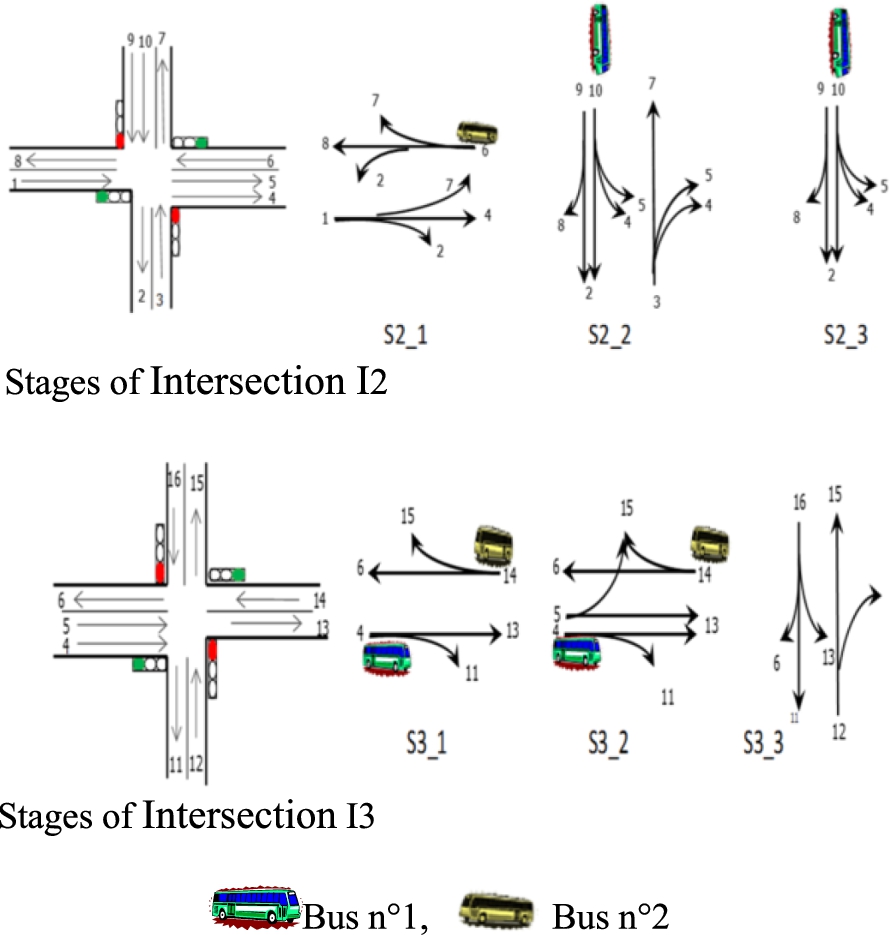
Stages of I2 and I3 and arcs used by buses.
In this paper, we have proposed a bimodal traffic regulation system based on a multi-agent system. Unlike other approaches, our model takes into account both public transport vehicles such as buses and private vehicle traffic and studies the regulation in a whole network. The objective of this research is to improve global traffic, to reduce bus delays and to improve bus regularity in congested areas (keeping regular interval between buses) of the network. In our approach, traffic regulation is obtained thanks to communication, collaboration and negotiation between heterogeneous agents at different levels of abstraction and at different level of granularity (microscopic vs macroscopic level). Firstly, we have shown that classical methods of traffic regulation present several weaknesses. Secondly, we have presented our multi-agent model that supports bimodal regulation and preserves monomodal regulation. Following a multimodal point of view, our multi-agent system computes dynamically traffic signal plans and at the same time ensures bus network regulation. When bimodal regulation is needed, our multi agent system computes traffic signals plans based on the real-time traffic situation and on priority given to buses. Thirdly, we have run a simulation prototype on the JADE platform. The results show that our MAS strategy with priority improves both buses travel time and buses regularity. Our results also show that this bimodal MAS strategy improves buses as well as private vehicles traffic and reduces bus delays. Further work needs to be done: a more realistic network should be defined in the simulation run and more validation and testing should be undertaken with the definition of several indicators. It would also be interesting to have more testing to find Pareto front and multi-criteria optimization in order to get equilibrium between public transport delays and private traffic delays.