
Abstract
BACKGROUND:
Few studies have reported the contribution of correction of leg length discrepancy (LLD) on the kinematic and kinetic characteristics of the pelvis and hip joints among those who must stand while working using shoe insoles and a three-dimensional (3D) motion analysis system.
OBJECTIVE:
To investigate dynamic pelvic and hip joint angles and hip moments using a 3D motion analysis system with and without insoles in standing workers with LLD.
METHODS:
Kinematic and kinetic data of 31 participants with LLD were collected using a motion analysis system and force platforms. Participants were asked to walk wearing standard shoes or shoes with LLD-corrected insoles. Repeated-measures analysis of variance (ANOVA) was used to compare the kinematic and kinetic data of the hip joints and pelvic orientation according to leg side and corrective interventions for LLD.
RESULTS:
There were significant differences in maximal ROM of hip adduction and abduction with vs. without LLD insoles in the longer and shorter legs (p < 0.05). There were significant differences in maximal elevation (p = 0.004) and total coronal motion (p = 0.006) of the pelvic segment with and without insole corrections in the longer leg during gait.
CONCLUSIONS:
LLD correction using a customized insole is a recommended therapeutic intervention to improve the musculoskeletal imbalances of hip and pelvic segments in workers with LLD.
Introduction
Leg length discrepancy (LLD) is defined as an asymmetry in limb length and may be caused by an alteration of lower limb mechanics [1, 2]. LLD is known to have a negative effect on biomechanical factors such as standing posture and normal gait pattern [3]. In addition, LLD increases asymmetric changes in both legs in kinetic variables such as joint moment, joint force, and ground reaction force as well as kinematic variables such as joint motion range of motion (ROM), joint angular velocity, and walking cycle, which can lead to musculoskeletal pain and inflammation [4]. Although LLD is very common, occurring in up to 70% of the general population [5], some previous studies reported that an LLD as high as 2.5 cm did not negatively affect gait or running activities [6, 7]. On the other hand, LLD has been shown to have a significant association with many types of musculoskeletal dysfunction [8–12].
Abnormal alignment and movement of the pelvis is highly correlated with non-specific chronic low back pain (LBP) and functional scoliosis, and abnormal patterns of the pelvis during gait are closely related to LLD [8–10]. In particular, previous studies reported that LLD was associated with intensity of LBP and an increase in self-reported number of days with LBP during the past year among individuals who must stand while working [11, 12]. Objective and quantitative verification of the biomechanical effects of LLD in standing workers on the pelvis and hip segments is a very important issue in managing and preventing various musculoskeletal disorders such as LBP caused by LLD. Previous studies on LLD interventions for standing workers used pain intensity measured with a visual analog scale or paper-based questionnaire as outcome measures [11, 12]. Few studies, however, have explored the effect of correction of leg length discrepancy on the kinematic and kinetic characteristics of the hip joints and pelvic orientation among those who must stand while working using shoe lifts (insoles) and a three-dimensional (3D) motion analysis system during gait [1, 2]. Therefore, the aim of the current study was to investigate the effect of shoe lift correction on biomechanical variables in the hip and pelvis among standing workers with LLD through 3D analyses of pelvic motion, dynamic ROM of the hip joints, and hip moments. It was hypothesized that, when wearing the corrective shoe lifts, participants would walk with decreased asymmetry of pelvic motion, ROM of the hip joints, and hip moments between the two lower limbs.
Methods
Participants
Thirty-five retail staff (8 males, 27 females) with LLD participated in this study. All participants selected for this study were cashiers and customer service workers who had to stand for long periods at work. Before leg length measurements were taken, the participants received a questionnaire that included items on occupational history and general health status. All participants had been working at their jobs for at least 5 years and worked on average more than 5 hours a day, 5 days a week. Their general health was relatively good such that they had no problems performing the laboratory gait analysis. Potential participants were excluded if they had osteoarthritis, rheumatoid arthritis, or musculoskeletal or neurological disorders of the lower extremities, or if they were taking any medications that interfere with gait. The participants self-reported the intensity of hip joint pain or LBP during the prior two months using a 10 cm visual analogue scale (VAS). Participants had LLD of 5 mm or more; approximately 50% of standing workers meet this criterium [11, 12]. Leg length was measured with a tape measure between the medial malleolus and the anterior superior iliac spine with the participant in a supine position [13]. The average LLD and general characteristics of the participants are shown in Table 1. The average LLD of all participants was 11.2 mm, while 16% of the participants had an LLD of at least 15 mm. There was no significant difference in leg length between genders (p > 0.05). They had hip joint pain and an LBP intensity of average 2.6 on a 10 cm VAS. The mean age, height, and weight of all included participants were 39.1±6.7 years, 162.7±5.1 cm, and 60.0±9.2 kg, respectively. The study was approved by the Institutional Review Board of Jeonju University (jjIRB-170615-HR-2017-0609). All participants provided written informed consent before participation.
Characteristics of the study participants (N = 35)
Characteristics of the study participants (N = 35)
Three-dimensional kinematic and kinetic data of the hip joints and pelvic motion were collected using a Vicon Motion Analysis System (Vicon Inc., Oxford, UK) with six cameras (T10) operating at a 100 Hz sampling rate while the participants walked along a 6 m walkway. The camera system was synchronized with two BP400600 force platforms (AMTI, Watertown, MA, USA), which were embedded in the middle of the walkway and sampled data at 500 Hz. A calibration T-wand (7.5 cm) was used to calibrate the motion analysis system and to identify the lab origin. The captured kinematic and kinetic data were processed using the Nexus 1.8.5 software program (Vicon Inc., Oxford, UK).
For the dynamic walking condition, participants wore 40 retroreflective markers (1.4 cm), which were attached bilaterally to the participants’ forefeet, midfeet, rearfeet, malleoli, femur epicondyles, greater trochanters, and anterior and posterior superior iliac spines. Four-marker clusters were attached bilaterally to the shank and thigh segments according to the six-degrees-of-freedom (6DOF) model [14]. First, static calibration data were captured from each participant to create the hybrid model for later analysis of the 3D kinematics and kinetics of the hip joints and pelvic motion during gait trials. Participants were asked to walk freely along a 6 m walkway wearing a standard pair of shoes (Cubio, JKGOLD, Korea) or a pair of shoes with one corrective insole while we acquired biomechanical data of the lower limbs using the Calibrated Anatomical System Technique after static calibration capture. Participants were given a standard shoe for both legs and a raised LLD-corrected insole (Cubio, JKGOLD, Korea) for the shorter leg. The insole was made of a soft polyurethane material and was made to fit each participant’s shoe. An ∼70% LLD-corrected insole was used for each participant. The insole correction of LLD was 70%, meaning that a 10 mm LLD was corrected with a 7 mm insole, leaving an LLD of 3 mm [12]. Participants executed a total of 8 to 10 walk trials per condition. Before data collection in each shoe condition, the participants were asked to walk for 1 min to familiarize themselves with the shoe condition. Between rounds of data collection, the participants were allowed to rest for 3 min to avoid becoming fatigued during the tests. The order in which the shoes were worn (standard shoe or corrected shoe with insole lift) was randomly assigned before the walking trials began.
Following data acquisition and processing using the Vicon system and Nexus program, the Visual3D analysis software program (C-Motion, Rockville, MD, USA) was used to obtain the final kinematic and kinetic results and graphical reports of the hip joints and pelvic orientation (Fig. 1) (Fig. 2). Kinematic data were low-pass filtered with a 4th order Butterworth filter and a cutoff frequency of 6 Hz. Kinetic data were low-pass filtered with a 4th order Butterworth filter and a cutoff frequency of 15 Hz. The X-Y-Z Cardan sequence defined the order of rotations, following the right-hand rule for the segment coordinate system axes [14]. Visual3D created a virtual bone segments model in space based on a set of anatomical reflective markers that enabled the related joint angles to be calculated (Fig. 3). Hip joint moments were normalized to body weight and height.

Representative curves of three-dimensional pelvic motion during gait for LLD-corrected ROM (solid line) and standard shoe ROM (dotted line) from 16 repetitive trials. The line indicates the mean value and the band shows standard deviation.
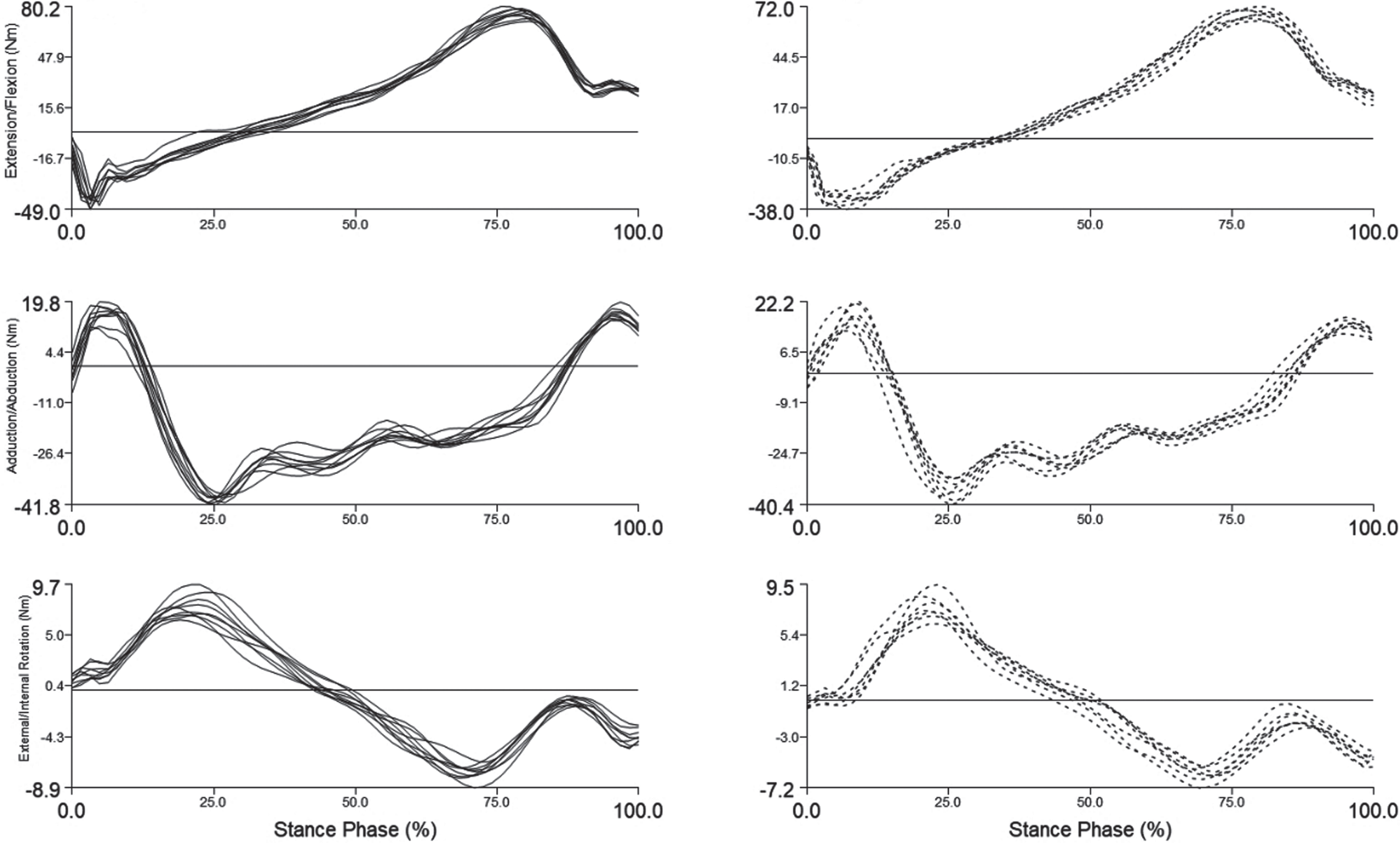
Intra-individual variability in three-dimensional hip moments (raw data) during gait. LLD-corrected moment (solid line) and standard shoe moment (dotted line) from 16 repetitive trials.

Calibrated Anatomical System Technique, used to measure the range of motion of hip joints and pelvic orientation with the Visual3D program.
Kinetic and kinematic data were found to be suitable for parametric testing by the Kolmogorov-Smirnov test. Repeated-measures analysis of variance (ANOVA) with Bonferroni adjustment was used to compare the kinematic and kinetic data of the hip joints and pelvic orientation according to leg side and corrective interventions. If the main effect (side or intervention) was significant, post-hoc testing was used to determine the differences based on the ANOVA results. All analyses were conducted using SPSS version 23.0 (IBM, Armonk, NY, USA). The level of significance was set at p < 0.05.
Results
Three-dimensional ROM of hip joints with vs. without insoles
Table 2 shows the maximal ROM of the hip joint with and without corrections during gait. There were significant differences in the maximal ROM of hip adduction and abduction with vs. without LLD insoles applied to the longer and shorter legs (p < 0.05). However, there were no significant differences in the other maximal ROMs of the hip joint (p > 0.05) with vs. without LLD insoles (Table 1). Significant differences were found in the maximal ROM of hip extension, adduction, abduction, and internal rotation between the long and short legs when participants wore the standard shoes without insole correction during gait (p < 0.05).
Maximal ROM of hip joint with and without correction during gait (N = 35)
Maximal ROM of hip joint with and without correction during gait (N = 35)
Note. *Significant differences between with and without correction condition. †Significant differences between long and short legs in the no-correction condition. †p < 0.05 using 2×2 repeated measures ANOVA with Bonferroni’s correction.
The results of 2×2 repeated-measures ANOVA comparing the 3D maximal motion of the pelvic segment during gait with or without insole correction are shown in Table 3. There were significant differences in maximal elevation (p = 0.004) and total coronal motion (p = 0.006) of the pelvic segment with and without insole correction in the longer leg during gait (Table 3). However, there were no significant differences in any of the maximal motion of the pelvic segment according to the different correction conditions in the shorter leg and no interaction effects between leg sides and correction conditions (with or without) (p > 0.05). In addition, significant differences were seen in the maximal motion of pelvic elevation and total coronal motion between the long legs and the short legs when participants wore only the standard shoes during gait (p > 0.05) (Table 3).
Maximal ROM of the pelvis with and without correction during gait (N = 35).
Maximal ROM of the pelvis with and without correction during gait (N = 35).
Note. *Significant differences between with and without correction condition. †Significant differences between long and short legs in the no-correction condition. Total sagittal, coronal, and transverse motions refer to the entire range of motion that occurs in each plane of movement. †p < 0.05 using 2×2 repeated measures ANOVA with Bonferroni’s correction.
Table 4 shows the maximal moments of the hip joint with and without correction during gait. There were significant differences in most moment variables related to the hip joint with vs. without LLD insoles applied in the longer leg except for the moments of adduction, abduction, and internal rotation (p < 0.05). Significant differences were shown in the maximal moment of hip adduction, abduction, internal rotation, and external rotation between the long and short legs when participants wore the standard shoes without correction during gait (p < 0.05) (Table 4). There were no interaction effects of the maximal moment of the hip joint between the leg sides and correction conditions (with or without) (p > 0.05).
Maximal moment of hip joint with and without correction during the stance phase of normal walking (N = 35).
Maximal moment of hip joint with and without correction during the stance phase of normal walking (N = 35).
Note. *Significant differences between with and without correction condition. †Significant differences between long and short legs in the no-correction condition. †p < 0.05 using 2×2 repeated measures ANOVA with Bonferroni’s correction.
Objective and quantitative kinematic and kinetic evaluation is an essential component of medical interventions and an important factor in determining successful therapeutic outcomes in patients with musculoskeletal dysfunctions such as LLD [15]. This study investigated the dynamic ROM of the hip joint and pelvic segment with kinematic data and 3D hip moment with kinetics data during gait with or without LLD correction using insoles in workers who must stand while working. Although LLD is a common musculoskeletal dysfunction, LLD of less than 20 mm does not impact activities of daily living and does not adversely affect the kinematic parameters of gait, walking speed, or running [7, 17]. On the other hand, an LLD of less than 20 mm can cause plantar fasciitis, stress fractures, knee osteoarthritis, functional scoliosis, and unspecific chronic LBP [9, 18–20]. Most participants in this study had an LLD of more than 10 mm. A previous study reported that 244 of 1309 patients with LBP had an LLD of greater than 10 mm [21]. In addition, LLD was associated with intensity of LBP among participants engaged in standing work [11]. Although this study was not intended to verify the lower limb load distribution according to LLD correction, when a standard shoe was used on both feet, the shorter leg took 62% of the load. On the other hand, when the leg length was somewhat equalized with the corrective insole, the shorter leg took 55% of the load. A comparison (paired t-test) of the correction with the level weight-baring distribution of both legs showed a significant difference (p < 0.05). These results showed that weight distribution improved in both limbs when LLD was corrected.
The results of this study showed that the maximal ROM of hip adduction significantly decreased and that of hip abduction significantly increased during gait when participants wore a shoe with an LLD-corrective insole compared with no correction in the long leg side. On the other hand, there was a significant increase in hip adduction and a significant decrease in hip abduction on the short leg side with vs. without LLD correction. These results indicate that the hip joint movement most affected by LLD occurs in the sagittal plane. In addition, most maximal ROM variables of the hip joint showed significant differences between the long leg and the short leg sides in the no-correction condition; however, all ROM variables of the hip joint were significantly different between the two leg sides when LLD correction was applied. These results indicate that the LLD-corrective insole ameliorated the difference in leg length to restore balance in the ROM of the hip joint on both leg sides during gait. Although there are no previous studies to which the results of the current study can be directly compared, Resende et al. [3] reported that participants with LLD prefer to use strategies that decrease the length of the longer leg and increase the functional length of the shorter leg.
The extent of pelvic anterior and posterior tilting is 2° to 4° while walking at a comfortable speed [22]. In this study, the average maximum ranges of the anterior and posterior pelvic tilting of all subjects were about 2.48° to 2.89° the maximum pelvic movement ranges in the coronal plane were 7.35° to 7.36°, and the maximum movement in the horizontal plane was 8.96° to 9.68° during gait when participants wore shoes with LLD correction. These results corroborated previous reports of normal pelvic movement during free walking [22, 23]. In most participants in this study, significant differences occurred in the maximum pelvic elevation and the entire pelvic ROM in the coronal plane on the long leg side when standard shoes only were applied during gait. On the other hand, the pelvic orientation of the short leg side was not affected by LLD during gait because there were no significant differences in all pelvic orientation variables when applying standard shoes only. These results verify that excessive pelvic movement occurred in the coronal plane of the long leg side, even if the leg length difference was less than 20 mm, among persons who stand while working. Walsh et al. [24] applied LLD insoles from 1 cm to 5 cm sequentially to verify the mechanism of action of pelvic compensation in seven participants. In that study, pelvic obliquity in the coronal plane of the long leg side was used to compensate for an artificial LLD of up to 2.2 cm, and an LLD of 2.2 cm or more was compensated for by the movement of the knee and ankle joints of the longer leg, showing similar results to this study. LLD and low back pain are very closely correlated and LLD was found in more than 70% of 300 patients with low back pain; furthermore, excessive pelvic movements during walking can negatively affect the lumbar region [25].
The hip moment variables in the coronal and transverse plane between the long and short leg sides showed significant differences when participants wore standard shoes during gait. The hip moment showed an extension moment peak at the time of the initial heel strike and a flexion and external rotation moment peak at 75% of the stance phase (Fig. 2). On the other hand, the maximal hip adduction and internal rotation moments were shown at 25% of the stance phase during gait (Fig. 2). In this study, despite the presence of LLD, there was no significant difference in the flexion and extension moments of the hip joint when only standard shoes were worn during gait. This is most likely because imbalance of the hip moment and compensation control for LLD mainly occurs in the coronal plane [15, 24]. The maximal moments showed significant differences in hip flexion, extension, and internal rotation on the long leg side with vs. without LLD correction. On the other hand, there were no significant differences in all moment variables except for maximal extension with vs. without LLD correction on the short leg side. These results are because kinematic and kinetic factors such as step length and muscle strength, which can affect hip moment, vary depending on leg length, and the moment compensation caused by LLD may occur in lower limb joints other than the hip joint.
The strength of this study lies in verifying the biomechanical effects of LLD-corrective intervention on hip and pelvic segments through objective and reliable measurement tools in workers with LLD who stand for long periods at work. However, the study has a few limitations that should be noted. Although this study was conducted on employees who must stand at work, the participants belonged to only one specific occupation (retail staff), and may not represent workers in various industries. Thus, the results of the study cannot necessarily be generalized to various types of workers with LLD who stand for many hours at work. In addition, this study did not verify the effect of LLD correction on clinical symptoms such as LBP. Therefore, further studies are needed to investigate the relationship between LBP and LLD and the effect of LLD on 3D biomechanical data in the lumbar segment and knee or ankle joints under the same experimental conditions as this study.
Conclusions
This study found a significant association between LLD and imbalance of hip ROM or pelvic orientation and hip moment among retail staff who must stand while working. In addition, these biomechanical imbalances were significantly improved when LLD correction was applied. Therefore, the results might be used to explain the kinematics and kinetics of unspecific chronic LBP, which commonly develops among workers with LLD who stand while working.
Conflict of interest
The author declares no conflict of interest.
Funding
This study was supported by the National Research Foundation of Korea (NRF) grant funded by the Ministry of Science and ICT (No. 2018R1C1B5042645).