
Abstract
BACKGROUND:
Errors can have dangerous consequences, resulting in a preventive strategy in most company-based technical vocational education and training (TVET). On the contrary, errors provide a useful opportunity for learning due to mismatches of mental models and reality and especially to improve occupational safety and health (OSH).
OBJECTIVE:
This article presents a didactic concept for developing a learning system based on learning from errors. Learners shall directly experience the consequences of erroneous actions through presenting error consequences in augmented reality to avoid negative, dangerous, or cost-intensive outcomes.
METHODS:
Empirical data prove errors to be particularly effective in TVET. A formal description of a work system is systematically adopted to outline a connection between work, errors concerning OSH, and a didactic concept. A proof-of-concept systematically performs a use case for the developed learning system. It supports critical reflections from a technical, safety, and didactical perspective, naming implications and limitations.
RESULTS:
By learning from errors, a work-based didactic concept supports OSH competencies relying on a learning system. The latter integrates digital twins of the work system to simulate and visualise dangerous error consequences for identified erroneous actions in a technical proof-of-concept. Results demonstrate the ability to detect action errors in work processes and simulations of error consequences in augmented reality.
CONCLUSION:
The technical learning system for OSH education extends existing learning approaches by showcasing virtual consequences. However, capabilities are limited regarding prepared learning scenarios with predefined critical errors. Future studies should assess learning effectiveness in an industrial scenario and investigate its usability.
Introduction
Empirical research has shown that performing erroneous actions based on faulty decisions provides a valuable opportunity for learning due to mismatches between mental models and reality [1–3]. However, examining the current learning approaches for teaching occupational safety and health (OSH) in company-based technical vocational education and training (TVET) indicates that learning processes often do not allow errors because of negative consequences. Thus, errors [4–7] can lead to safety-critical and non-justifiable consequences and accidents. Accordingly, unacceptable negative consequences for workers, work equipment, work objects, or the environment at the workplace lead to technical exclusions of errors in real work systems or to teaching staff being responsible for avoiding unsafe system conditions by guiding and supervising. Therefore, the latter is interested in ensuring that learning persons do not cause errors in real work systems to rule out responsibility and liability issues.
To close this gap, this paper presents a concept for a technical learning system that allows workers to experience critical error consequences in augmented reality (AR). By adding a virtual representation of error consequences to a real-life situation, the introduced learning system utilizes learning effectiveness of errors [8–12]. For this purpose, the digital twin (DT) concept [13] for a work system is defined to detect errors and simulate the relations between an error’s cause and its effects. The state of the work system described by the DT can assist in presenting error consequences to learners using AR. The main innovation in the didactic concept presented here is that learners work in real, physical work systems when performing learning tasks. Only if learners act erroneously, inducing a dangerous or cost-intensive state, error consequence will be visualised to the learner exclusively via a head-mounted display. If no error occurs during the learning process, the learning task will stay exclusively in the real work system.
The research agenda envisions implementing an industrial injection moulding process, as illustrated in Fig. 1. Therefore, the standardised development of the DT for a work system poses a challenge in developing a didactic concept that uses a real work environment and intends to use the learning effectiveness of errors for OSH competence acquisition.

Vision of the implemented learning system in an industrial injection moulding work process.
In order to conquer the additional challenge of a technical learning system, the article’s research question is as follows: How can a technically feasible AR learning system for simulating critical error consequences be implemented in a real industrial work process for TVET?
To answer the question, a formal description of a work system derived from literature is required and presented in the paper. Such a work system model is the basis for presentating the concept for the technical learning system. Also, the paper presents how a technical learning system can represent the worker’s high degrees of freedom when it comes to processing a learning task in real environment. Also, a reliable prevention strategy is introduced to stop a learning person from continuing an action when an error has been committed, and the real-world consequence is about to occur. From a more technical perspective, starting the virtual representation of an error consequence in AR at a realistic point in time depends on the current state of the task. The functions of the technical learning system to be developed must address these requirements and be sufficiently confirmed by a proof-of-concept. The paper’s objective is to present a technical learning system concept for work-based learning of OSH competencies and to proof its feasibility with a practical minimal working example.
A technical learning system for the application in an operational environment of a company must have comprehensive interfaces between the learning system and the real work system in which the learning task takes place. Therefore, a learning scenario with a defined learning task requires a description that provides all elements or functions of the task in the learning system or the real work system. Moreover, since the learning effectiveness of errors is a central aspect of the didactic concept, the conception has to describe the learner’s options for action and the actions performed. Therefore, many influencing factors and relations have to be considered during the learning system’s development. In order to ensure systematic development of a learning scenario, there is a need to formally describe the elements and relations of the real work system to define the corresponding interfaces of the technical learning system. A systemic view in the form of a work system allows such descriptions considering all facets of socio-technical systems (STS) in an acceptable way.
Therefore, the widely used concept of a formal description of work systems in industrial engineering [14] makes a valuable contribution to linking a technical learning system to a real work system. Accordingly, when developing a concept for the technical learning system, it is necessary to foresee how the characteristics of the work system relevant for a learning scenario can be formally described [15–17]. Furthermore, only a formal description allows the description of a worker’s actions and a system’s states in simulations. The learning system requires both information to detect errors and to simulate their consequences.
The socio-technical approach is focused on the primary work system [cf. 18, 19], which delineates an operative action from the environment and subsystems. Research in industrial engineering interprets the work system in a technology-oriented manner [e.g. 20] and developed it further to design human-oriented work [21]. Mumford [22] and Luczak et al. [21] describe the German perspective on STS design in an international context. Work systems in the German hemisphere neglect detailed social situatedness outside of man-machine investigations or similar micro-ergonomic purposes. Figure 2 illustrates a general representation of the work system [23].

Since a work process passes through several states of a work system towards achieving its aim, the work system enables the description of such transformation processes. However, such transformation processes may cause system states leading to risks for workers.
The relevant concept of a work system for the development of a technical learning system is based on the production theory [24], the action regulation theory [e.g. 25], and the general system theory [17]. However, the work system developed in several stages [26, 27], including lecture notes [28, 29], has not been published yet in the application context of OSH.
To describe human errors that lead to a dangerous state of the work system, the extension of the system according to Fig. 3 is suitable. The work system as a whole is delimited from its environment and consists of the execution system as well as the planning and control system as two major subsystems [cf. 30]. The former comprises the set of observable actions which at least one worker performs to process a work task. If workers act incorrectly, illnesses, injuries, and disabilities can occur depending on the system state. While the execution system exclusively describes an action, the planning and control system represents the planning and decision-making process concerning the solution of task processing. This differentiation makes it possible to describe the causes of illnesses, injuries, and disabilities from the perspective of OSH.
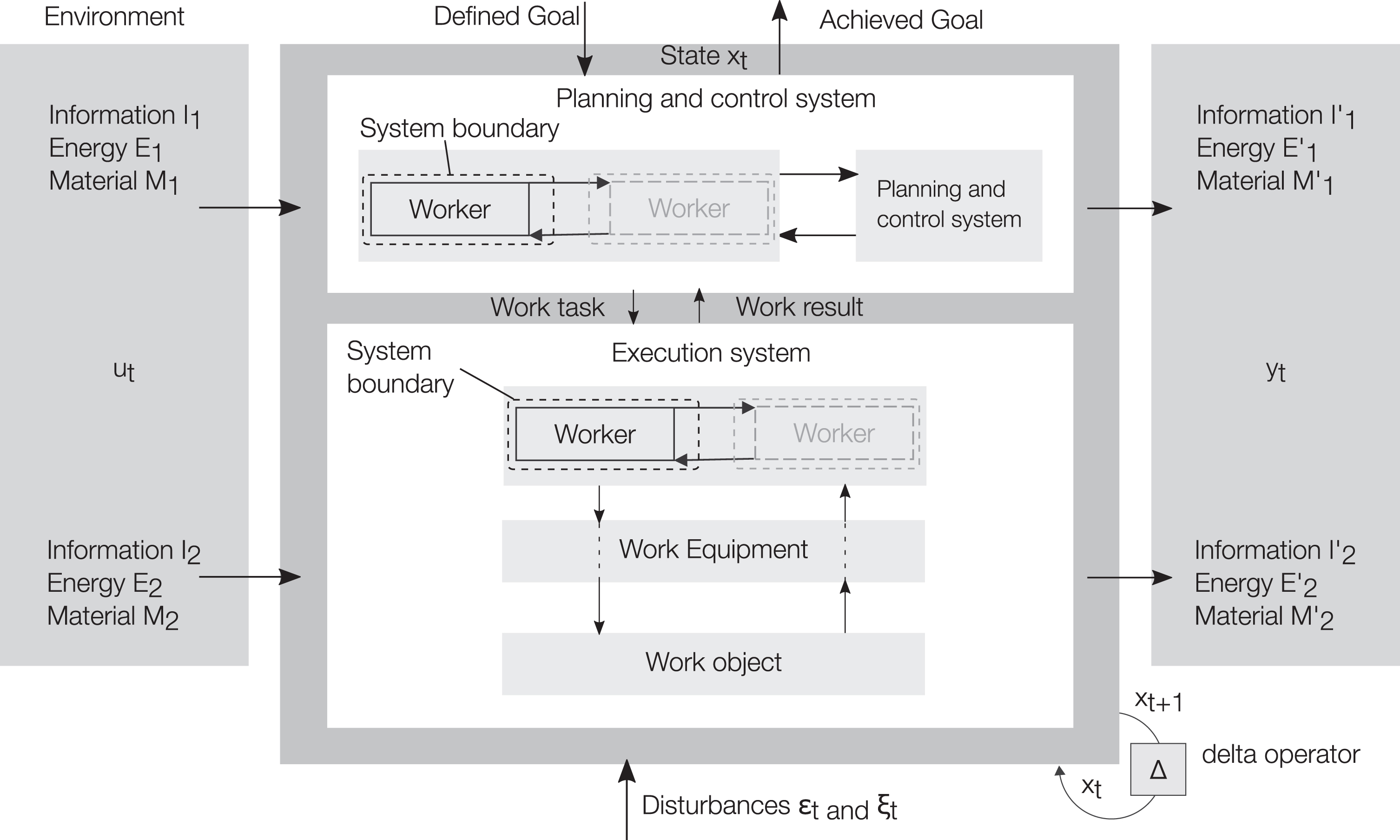
Extended work system [27].
Furthermore, the model is suitable for locating OSH measures since the planning and control system develops and defines them. In detail, there is a difference to locate OSH measures in the planning and control system of the work system or in a work preparation department. The measures for efficient OSH in the execution system are part of the work task and met by the workers. The actions of workers in the execution system change the state of the work system over time. Thus, the technical learning system has to detect those undesirable states of the work system for OSH so that the technical learning system can prospectively simulate the effects of a worker’s actions. This also includes detecting erroneous actions by the worker and analysing the effects in terms of consequences. Modern methods offer opportunities for comparably complex design tasks [e.g. 31].
In order to promote safety in work systems, one can distinguish multiple ways in several generations [32–34]. Following traditional approaches of safety from first-generation theories [35, 36], safety concerns mainly situate in the execution system of the work system [e.g. 37, 38]. Furthermore, second-generation safety theories such as SRK [39] or GEMS [40] add the primary worker of the planning and control system to the previous considerations and methods often focussed on reliability [41–44]. Finally, recent third-generation safety approaches focus on all system elements, relations, and the system’s environment [32, 34,45]. For instance, Hollnagel [32] argues for a paradigm change from preventing reactively erroneous outcomes to securing proactively positive outcomes as an underlying principle of safety science.
Common systemic error models vary in system boundary definitions, resulting in different understandings of STS. For instance, Leveson’s systems-theoretic accident model and process model [45, 46] incorporate a hierarchical system understanding but differ from the system presented in this study. Nevertheless, in concordance with Ropohl’s [15, 17] human action system, it clarifies different levels in the system environment and feedback loops from the sharp end on the shop floor up to the management and executive board at the blunt end of the company [cf. 32]. The authors have shown compatibility with the popular systemic safety theory “functional resonance analysis method” (FRAM) while solving issues of the work system model with FRAM [47, 48].
These approaches ensure the first and second safety criteria of Dainoff [49] which prescribe overall system safety and suitable interventions for safety improvement. On top of them, STS have two more criteria regarding Dainoff [49], illustrating organisational readiness to implement safety interventions, formally known as error culture, and pathways for implementing safety interventions.
OSH in technical vocational education and training
In technical vocational education and training (TVET), learning processes shall achieve goals that largely refer to work and personal development linked to the work objectives of the extended work system. In order to foster technical competencies related to work, TVET pursues several approaches such as situated learning [e.g. 50], work-based learning [e.g. 51], expansive learning within activity theory [e.g. 52], or workplace learning [e.g. 53]. All of them incorporate multiple dimensions or guiding ideas in learning processes. Moreover, learning strategies deeply rooted in ergonomics teach how to design their own work processes and workplaces within STS [54, 55]. By treating all guiding ideas seriously and equally, one will face dilemmas and decision-making problems [e.g. 56]. Therefore, workers have to develop strategies concerning opposing guiding ideas compatible to constraints of practice.
The highest-level learning goal is to understand the worker’s responsibility on work system design because the design results from interactions within the planning and control system as a macro-ergonomic reference signal in response to the system’s goal. Internal feedback loops in the work system support continuing improvements and optimisations exposed to environmental disturbances due to an open boundary interpretation and deviations of inputs or changing details in the system’s purpose. Therefore, all learning goals have to link indirectly to state and action properties of the extended work system and its elements.
Health and well-being [57] are examples of guiding ideas that workers need to recognise, as they are part of many curricula [58–60]. Most times, occupational safety and health (OSH) as a work-related specification of these guiding ideas in TVET situates within the execution system (see section 1) because professionals in technical vocations work with and on technology.
Young apprentices in technical vocations start their careers by learning to handle tools and machinery on the shop floor. They initially take an action-based view on their work objects or tools, so that their first relation to OSH is on the sharp end. Concerning work tasks, OSH typically states a traditional safety perspective in order to prevent health risks, incidents, and accidents as person-related design elements [35], especially in OSH legislation as a relevant norm for industrial work processes. On top of that, the traditional perspective and its methods such as hierarchy of control [61] support technology-oriented learning goals best. Prevention assists when finding an optimal solution to technical problems ensuring OSH.
On the contrary, recent safety theories and resilience approaches emphasise the disadvantages of traditional perspectives [e.g. 32], critisizing a gap in TVET apprenticeship. Recent safety approaches complement work- and outcome-oriented interpretation of learning more than theories, for example as negative knowledge [62–64], preventing dangerous events in the future. Therefore, this paper exemplifies an intervention based on an action-oriented learning task based on a traditional safety point of view, continuing with a reflection phase introducing perspectives from a third-generation safety point of view.
Learning processes for OSH competencies in TVET
Learning processes in the German dual VET system proceed in a work-based manner accompanied by VET schools to foster reflectivity and transferability [51]. The main objective is to develop handling competencies for vocational situations [cf. 60], including the ability for acting based on holistic judgements of the situation and its characteristics.
Errors identify mismatches of anticipation and effects that offer perfect opportunities for learning [45, 66]. In order to learn from errors, learning media have to be capable of processing erroneous solutions [67]. Empirical findings present tacit knowledge as crucially for OSH [68]. Consequently, after event reviews [69] or debriefings [70, 71] are the core of the concept because they elucidate errors based on the experienced consequence visualisation in AR. Reflection responds to a learning experience [72] that facilitates building mental models and generating tacit knowledge.
Figure 4 illustrates the complete learning process within human action and the supported process steps of the developed learning media. As the most relevant part, the reflection process starts with examining the actions at work while asking for the initial perceptions of the situation. This focus supports skills and knowledge associated with technical topics and linked disciplines. Next, there is a need to change the perspective to address recent safety approaches.
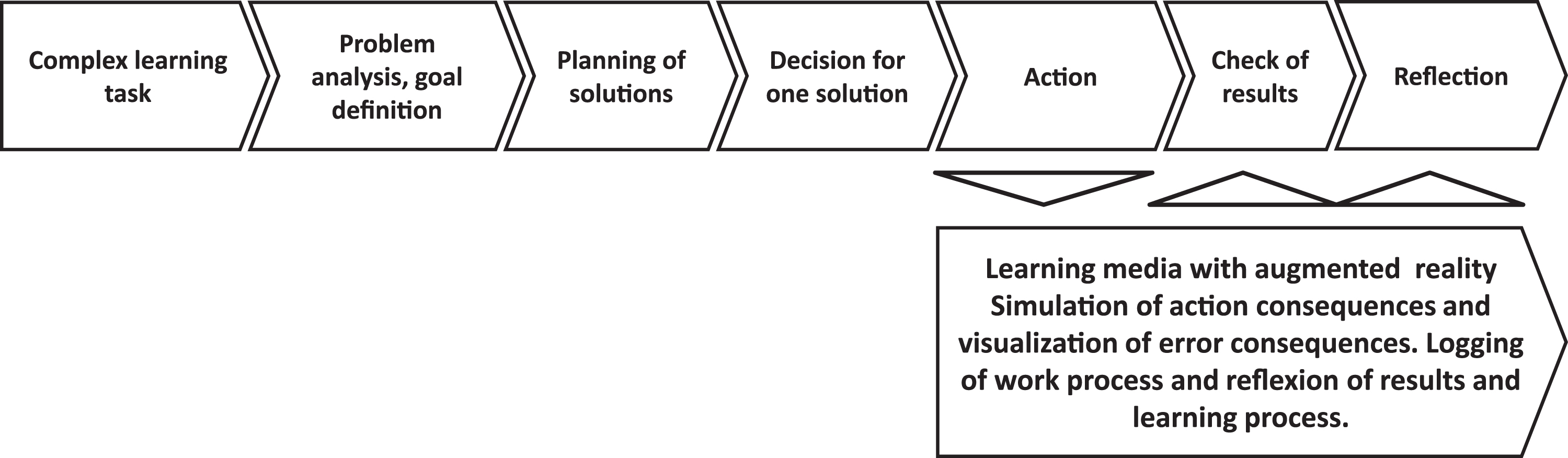
Work-based learning with actions and support of AR media.
Besides the theories mentioned in the beginning, the reflection framework of Mezirow [73] explains the intended outcome on the level of discriminant reflectivity or above in the layer model. Based on this, trainers support learners to become aware of their own perceptions, locate them as one point of view in the work system, and to question linked attitudes as well as social norms and values to challenge them with different perspectives. The work system helps to find starting points and links for this process.
To conclude, the reflection process contributes to closing the gap between first and third-generation safety theories. The intended outcomes of the learning process will increase OSH by recognising interdependencies of work characteristics with safety and health in the planning processes of vocational actions. Learners become aware of their role on the sharp end of actual work and understand the stakeholders’ perspective on the blunt end [cf. 30]. Therefore, apprentice’s vocational solutions will find a compromise regarding OSH and organisational safety culture in the future.
Learning task and learning process
Cleaning a connector as a consequence of diagnosing a malfunctioning machine is a minimal working example for the learning task that fulfils requirements of TVET in sections 4 and 5 and key requirements of the injection moulding process in section 1 of the learning system. The embedded action in the learning task comprises the following work process steps on a Fischertechnik industrial robot (see Fig. 5) as a machine: (1) Turn off voltage, (2) Disconnect encoder cabling, (3) Connector cleaning, (4) Connect encoder cabling, (5) Turn on voltage, (6) Execute test program. Figure 6 illustrates a learner performing the learning task supervised by a trainer.
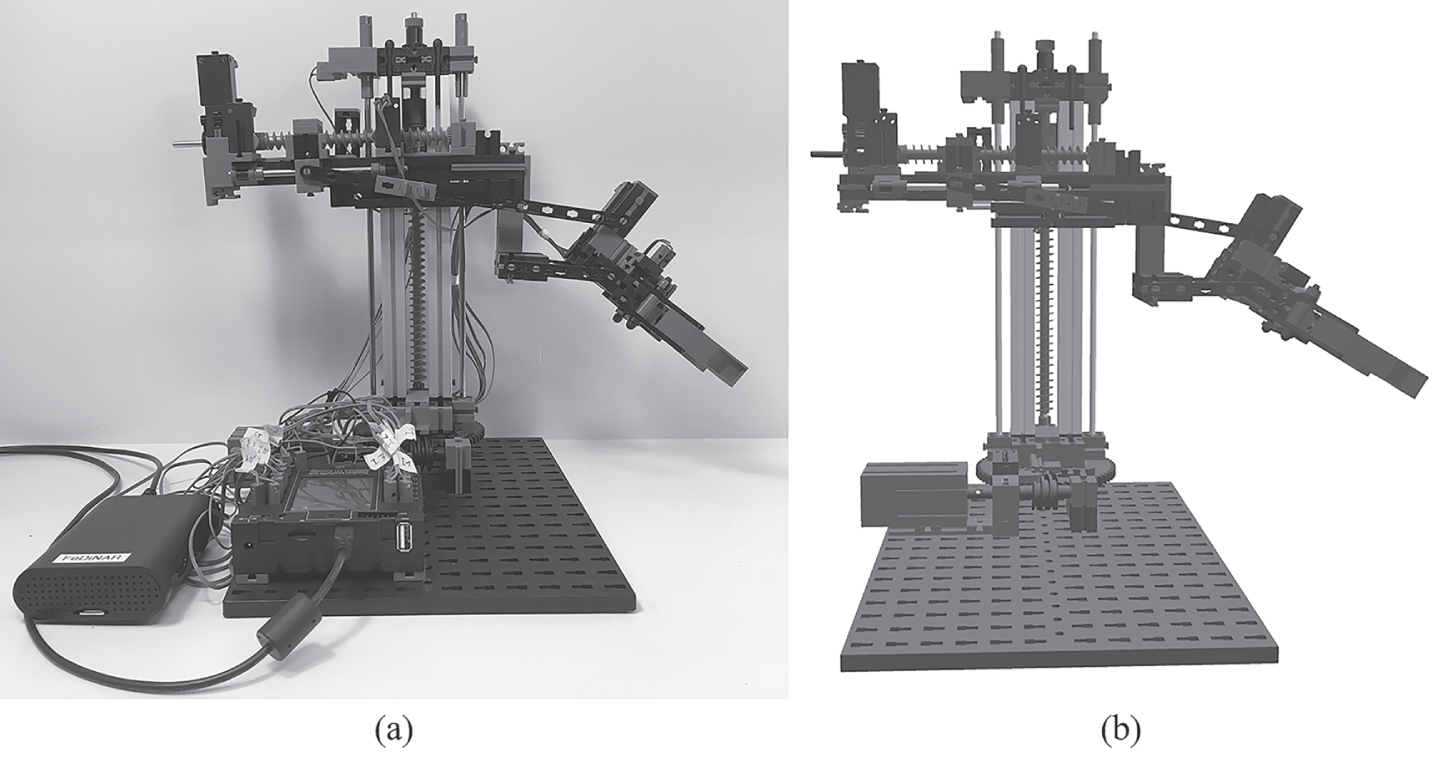
Modular construction system, fischertechnik Computing Robo TXT (a) and its DT (b).
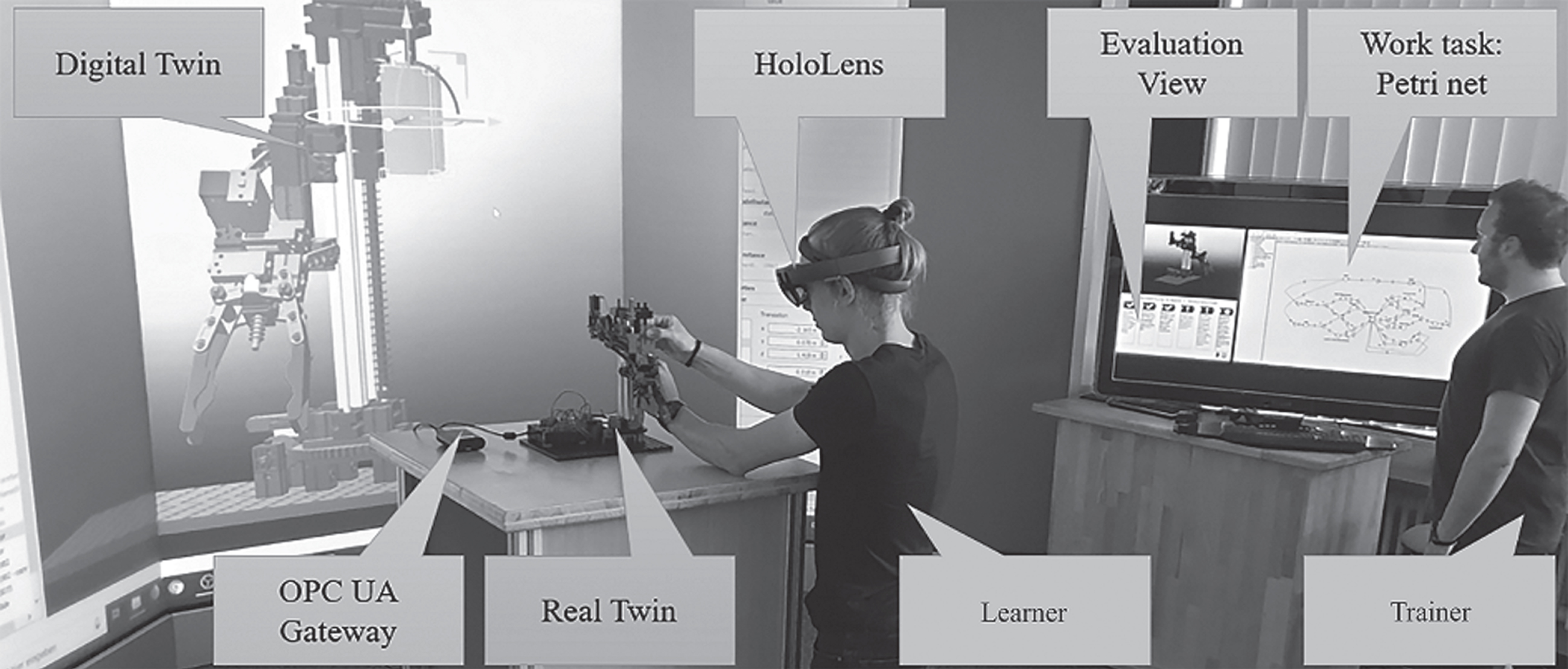
Implementation of the learning system use case.
By way of example, we highlight an error that may occur during the execution critical to OSH. That and similar errors were identified in the extended work system in section 2 combined with FRAM in section 3 [47] and supporting traditional methods [37]. The learner might ignore the turn off voltage operation, which would be an omission error. When disconnecting the encoder cabling, the worker could experience an electric shock, ultimately leading to electrocution in a real industrial scenario. Since cause and occurrence of the error consequence happen at different points in time, the learning system has to detect whether an omission causes an active voltage representing a state of information.
This example as well as similar scenarios present learning opportunities for the following reflection phase. In the first step, the learner has to perceive and understand the visualised error consequences. While it is rather obvious to acknowledge that a cabling conducts electric current, the electric shock visualisation may lead to the learner’s realization that electric voltage and current are dangerous and harmful magnitudes within his mental model of electricity. Besides being involved in error consequences, learners involve in discipline, norms, and standard-related reflections of acceptable work actions.
Furthermore, learners may go even beyond these realizations in order to support a contemporary interpretation of OSH. Thus, they start from their conducted and logged action at the workplace to perceive the workplace and its situation holistically. Here, trainers support workers to bring themselves and the work organisation in when considering the future design of a safe workplace as well as discipline-specific electricity or work process knowledge. Coming from a technical and traditional safety perspective, they derive effective OSH measures, for instance, by hierarchy of control [61] within the work system. Next, they question and criticise these measures from a systemic safety perspective. With the help of this, trainers introduce a switch towards resilient work design instead of prevention to manage risks. Last, learners combine their previous ideas as well as solutions with the connotations of resilient work design. As a consequence, they will broaden their scope of solutions while adapting them to different perspectives and stakeholders within the work system to increase OSH integrally.
A modular construction system, “Fischertechnik Computing Robo TXT”, demonstrates how the learning system is used in vocational education (see Fig. 5). In TVET, the learning robot offers analogous work actions on components and functions of industrial robots used in production. The robot represents the primary physical asset within the learning scenario for which a comprehensive digital twin (DT) is built. DTs, a virtual testbed (VTB), and a head-mounted display constitute the main components of the learning system’s setup (see Fig. 7). DTs represent the core part of the learning system replicating physical assets and reside within VTBs [13]. In the VTB, DTs allow the evaluation of their behaviour and interactions with them without manipulating their real counterparts. VTBs can simulate severe or dangerous prospective states of the work system, for instance, a robot arm moving with a high velocity towards a worker. Commonly, VTBs support CAD data as geometric representations of RTs. By adding additional information, the graphics engine feeds the head-mounted display with visual models of DTs. A flexible and modular simulation system called VEROSIM fulfils the VTB’s requirements for the learning system.
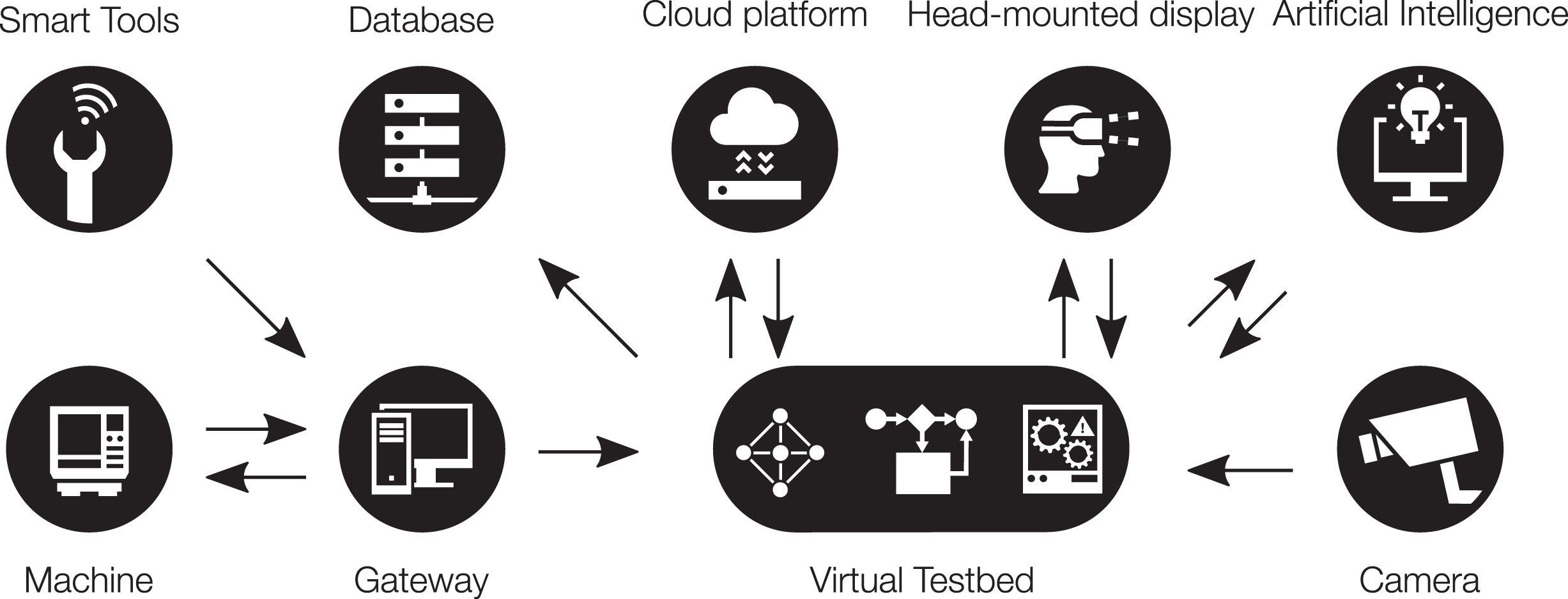
Technical system setup for action tracking and data processing in work processes [48].
Standardised machine data interfaces, smart tools as secondary devices, cameras, and artificial intelligence solutions provide the functionality of perceiving the work system’s state (see Fig. 7). All DTs connect to their real counterpart via standardised interfaces such as OPC UA or interfaces built into smart tools and devices. Sensors and supporting material (e.g. AR markers) enable state perception of non-digital equipment or other analogue work system elements. Observing state variables as representations or manipulations, for example by a worker, enables precise detection of the actions. The VTB uses observed state variables to represent the current state of its DTs and to simulate error consequences [13, 74].
A petri net represents the work system’s current state and state transitions for triggering error consequences. The current state representation serves as a starting point when simulating the state progression of the DTs in the future. An error consequence is a prospective work system state visualised by the head-mounted display to the learner, which is the Microsoft HoloLens 2 in the context of the learning system.
The learning system stores all data processed while working on a learning task in a dataset. A database with cloud access stores a compressed and pre-evaluated replay dataset for didactical use in the reflection phase after the vocational learning task has been completed. The database with cloud access is part of a holistic infrastructure for storing common learning tasks centrally and for sharing these among institutions in dual VET.
As described above, the learning system employs petri nets for the work system’s state representation and for triggering error consequences. The extended work system presented in section 2 introduces a delta operator that enables modelling states of the work system over time. Due to the complexity of work systems [75], a continuous and analytic state description over time considering all work system elements relevant for a learning scenario exceeds the requirements of the learning system and is practically impossible to define. Petri nets provide a formalism for discrete-event simulation and are popular for modelling workflows [76–78], since they significantly reduce the modelling complexity [75].
The learning system employs a petri net architecture consisting of several petri nets for modelling work system elements, namely work equipment, work objects, worker, and the worker’s actions resulting from the learning task. A detailed presentation of the architecture can be found in Kobelt et al. [79], and a high-level model of the architecture is illustrated in Fig. 8 (left). The petri net architecture models the work system’s execution system, and the petri net modelling the worker’s actions represents the core. An action pool and an action history allow defining actions while simulating which actions have been finished. The petri net architecture describes the state transitions (1) start action, (2) execute action, and (3) finish action, triggered by state transitions of the RTs modelled in the remaining petri nets. In Fig. 8 (right), a petri net of a compressed air pistol used for connector cleaning (step (3) in the learning task) models the states from its real counterpart in the work system. Transitions continuously query the compressed air pistol’s state and fire when the worker changes it. For example, in the initial state, the compressed air pistol is located at a fixed position P0. When the worker picks up the pistol, the transitions for picking up the pistol are fires and changes of the state into active usage. This information is forwarded to the petri net modelling the worker’s actions via the place “start action”. Another petri net triggers error consequences in the VTB using state information from the work equipment net. VEROSIM uses a language for defining object-oriented Petri nets and scripting of simulations called State Oriented Modelling Language++ (SOML++) in its simulation system [80].
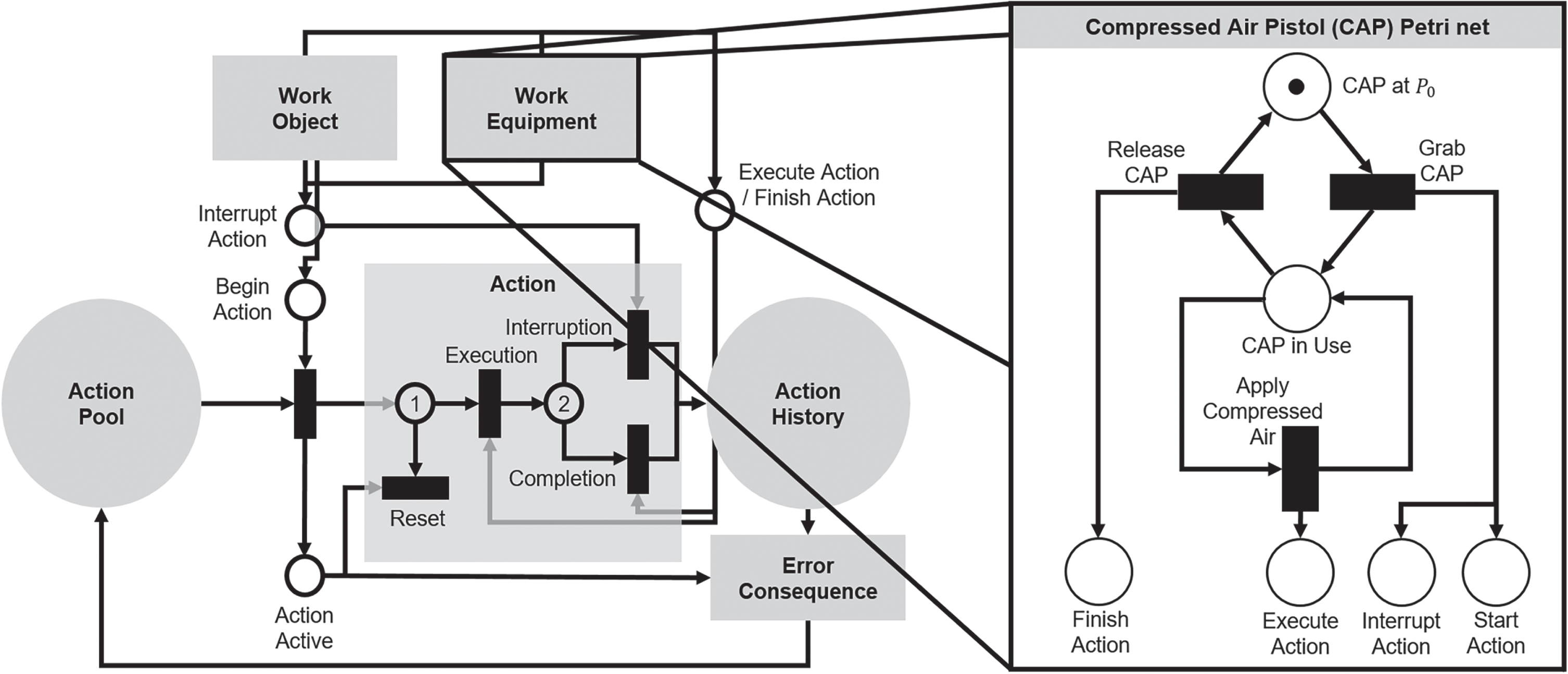
High-level Petri net architecture (left), Petri net of the Compressed Air Pistol (right).
We assume that the learner forgot to turn off the voltage in the learning task, and the petri net produced an erroneous token in the action history. The learning system captures all modelled actions of the extended work system and automatically evaluates its execution and error occurrence. If the learner continues with the execution of disconnect encoder cabling, the learning system needs to detect when the worker is about to start the action. An action can be detected by tracking the environment-related pose of the learner’s hand with the Microsoft HoloLens 2 when the hand approaches the cabling. Before the hand finally reaches the cabling, the petri net detects that the action has been started and triggers the visualisation of the error consequence in AR. The Microsoft HoloLens 2 shows the learner a simulated electric shock in AR. As a result, an error occurs in reality, whereas an error consequence is simulated in AR. By experiencing critical error consequences such as dangerous situations, learners and trainers can evaluate how and why their actions caused a critical error. Subsequently, they can reflect on the right way to approach the problem while preventing critical error consequences from occurring.
Discussion of the learning system for OSH education
Implications
From a pedagogical perspective, the learning system showcases support of visualised error consequences for reflecting errors, e.g. as a cause-and-effect relationship in work actions. It provides a tool for learners to explore the complex relationships inherent to an STS in a work-based learning task and supports conceptual as well as procedural knowledge gains in terms of OSH and related TVET learning contents within STS. Traditional approaches to OSH focus on preventing rather obvious errors, like preventing a hand from entering a dangerous workspace through having to press two buttons for activating the process with each hand. We advocate that these issues are caused by spontaneous human malfunction and still have to be tackled by traditional work safety measures.
However, complex tasks such as adjusting a set of processing parameters that can cause malfunctions in machines or harm people, such as the injection moulding case in section 1, require situation-dependent expert judgement, which the learning system can facilitate. Moreover, multiple perspectives and logics as part of STS can deviate in their evaluation of an action and generate different interpretations on errors or correct solutions depending on the guiding idea from the system. The learning system introduces this fact to learners to comprehend holistic aspects of actions at the workplace. The reflection phase addresses these perspectives on traditional OSH implementation on the sharp end of a work system first.
Following constructivists, learners change perspectives afterwards and get into contact with recent safety approaches as conceptionalised in section 5. Learners criticise their first solution to combine it or find safety solutions in the work system more proactively. On top of that, vocational didactics appreciate the tremendous improvement of learning media development compared to widespread static or closed dynamical digital learning media without sensor interfaces to reality.
From a technical perspective, the paper presents a proof-of-concept that tackles the challenges outlined in section 1, is based on a theoretical model as shown in section 2, and interprets errors, as can be seen in section 3. The technical solutions to simulate work in a discrete-event simulation offer a possibility to divide work actions and consequences into real and virtual worlds. Without the exhaustive exploration of all possible work system states, critical states might be overlooked in developing a learning scenario. Hereby, the combination of an STS as a social representation of work and the technical implementation in petri nets is a valuable hybrid [cf. 75] that can identify undefined states by simulation. Of course, laboratory constraints relax environmental issues to enable a fast-forward development process. Also, by considering work system states exclusively and interpreting transitions between them as actions, we bypass several serious issues of action detection in real industrial work processes. Such technical limitations, which the next section addresses in more detail, can be overcome by developing more sophisticated methodologies to design learning tasks and by extending the technical equipment for action detection accompanied by the technological progress of AR technology. In a nutshell, an AR learning system for educating individuals about OSH by simulating critical error consequences provides a feasible enterprise and represents a third-generation approach to work safety.
Limitations
The restriction of the learning system to predefined learning scenarios, such as the proof-of-concept in section 6 or the next step, the injection moulding process, are limitations. From the theoretical perspective of continuous action interpretation [cf. 45], discrete-event simulations do not meet salient characteristics of actions, but here, the chosen approach matches TVET learning theories [e.g. 52]. Although widely used for safety, reliability, and risk assessment in systems [81], the petri net formalism does not provide relevant modelling and simulation capabilities for identifying failure rates and modes as an event-discrete system [75].
Including only major severe errors e.g. identified with the help of expert interviews or classical methods [37], represents a drawback of the learning system. Actually, there are no OSH experts involved in the prototyping phase who should contribute before applying the system in real use cases.
The learning system cannot act as a stand-alone work safety measure and offers just implemented scenarios to achieve previously defined learning goals [75]. However, this is a methodological issue of error identification and not part of the learning system’s primary purpose.
Limitations of chosen technical solutions to observe system states restrict the freedom of learners in executing learning scenarios, for example the idea of learners who must put the compressed-air pistol back on predefined positions tagged with an AR marker. If learners forget to fulfill these action restrictions, the learning system might not recognise human action properly and simulate the wrong or no error consequence at all. Additionally, such restricted learning scenarios might be difficult to be transferred to real industrial work processes. As pointed out in the previous section, this limitation can be tackled by more reliable and flexible action detection tools that depend on the speed of ongoing technological progress.
Conclusion
In search of a technological or organisational solution that allows humans to experience errors and their consequences without negatively affecting the real world, this paper presents an error-based learning system for TVET that teaches workers about OSH by experiencing critical error consequences in AR. The learning system’s technical implementation builds upon a discrete-event simulation based on work processes modelling within an extended work system and models of its relevant states with a petri net. Its action-oriented didactic concept adopts traditional and recent safety approaches through (1) preventing errors in the real world during learning task execution and by (2) reflecting critical error consequences and OSH in the work system. The latter aspect enables to find answers on how to contribute towards safety in a work system. A proof-of-concept for a real use-case demonstrates the technical feasibility of a developed concept based on STS combined with systemic error models and work-oriented didactic concepts. The learning system’s function helps supporting the development of individual handling competencies and mental models to prevent error occurrence and the implementation of systemic measures for improved OSH at work in the future. Considering the aforementioned limits, the learning system represents a promising educational means for learning OSH. However, its capabilities strongly depend on defined learning scenarios and familiar errors. Future studies will implement real industrial learning scenarios and empirically evaluate the learning system’s effectiveness and benefits. Currently, efforts are being made for a prototypical implementation of the learning system in the mould-filling study shown in Fig. 1. Additional studies need to evaluate the learning system from an end-user perspective by investigating the usability of visualisations in AR and the interaction between worker and the learning system.
Ethical approval
Not applicable.
Informed consent
Not applicable.
Conflict of interest
None to report.
Footnotes
Acknowledgements
We thank the anonymous reviewers for their critical comments and recommendations that helped to improve our initial manuscript.
Funding
The contribution of this article is part of the project “FeDiNAR— Didactical Use of Errors with the Help of Augmented Reality”. It is funded by the Federal Ministry of Education and Research (BMBF) as part of the “Digital Media in Vocational Education and Training” program and is supported by the German Aerospace Center (DLR) under funding codes 01PV18005A and 01PV18005C.